
Two Functional Wheel Mechanism Capable of Step Ascending for Personal Mobility Aids

Abstract
:1. Introduction
2. Background
3. Problem Statement
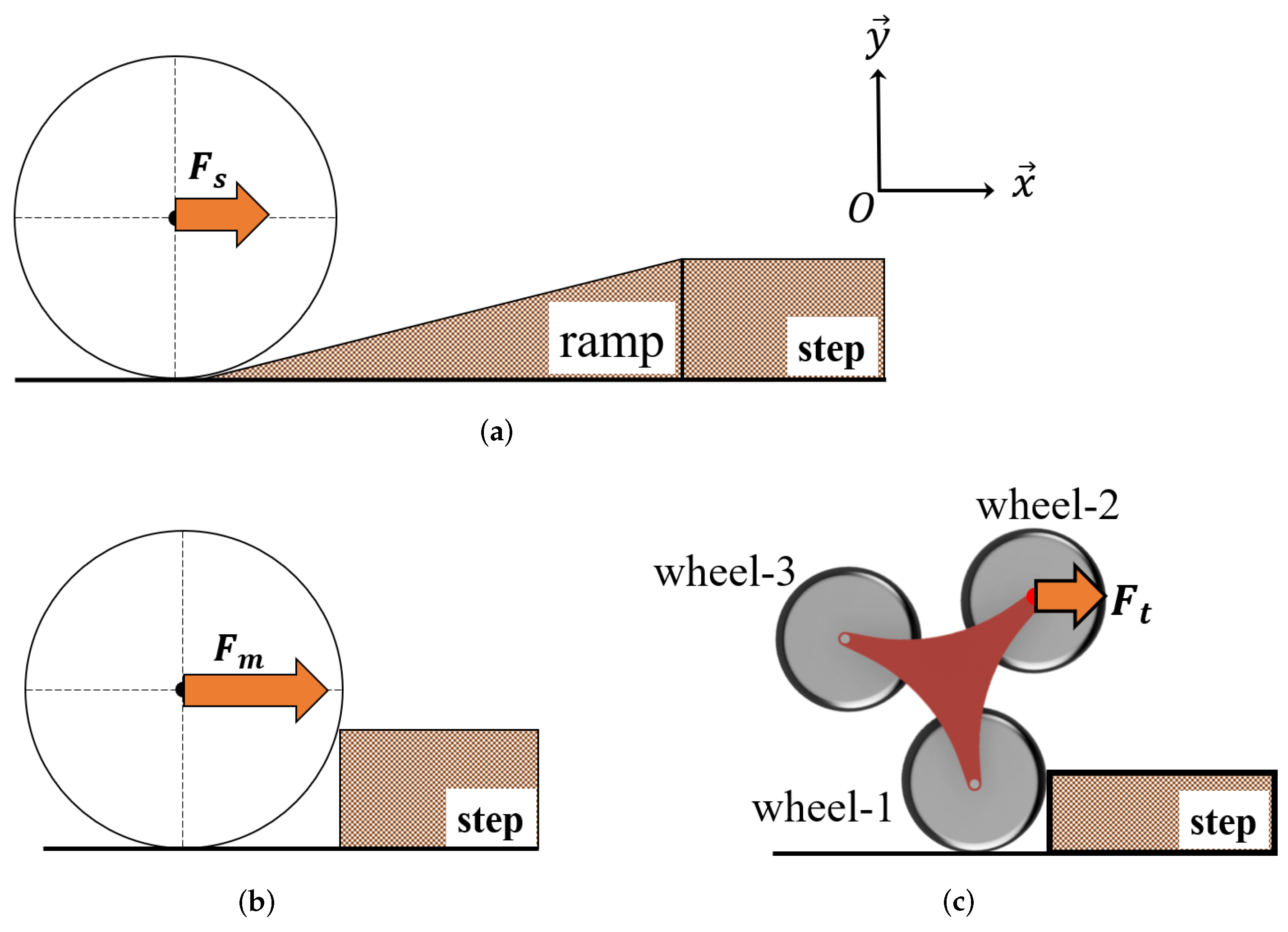
4. Gradient-Reduction Scheme
4.1. Step-Equivalent Gradient Model
4.2. Derivation of New Center of Rotation
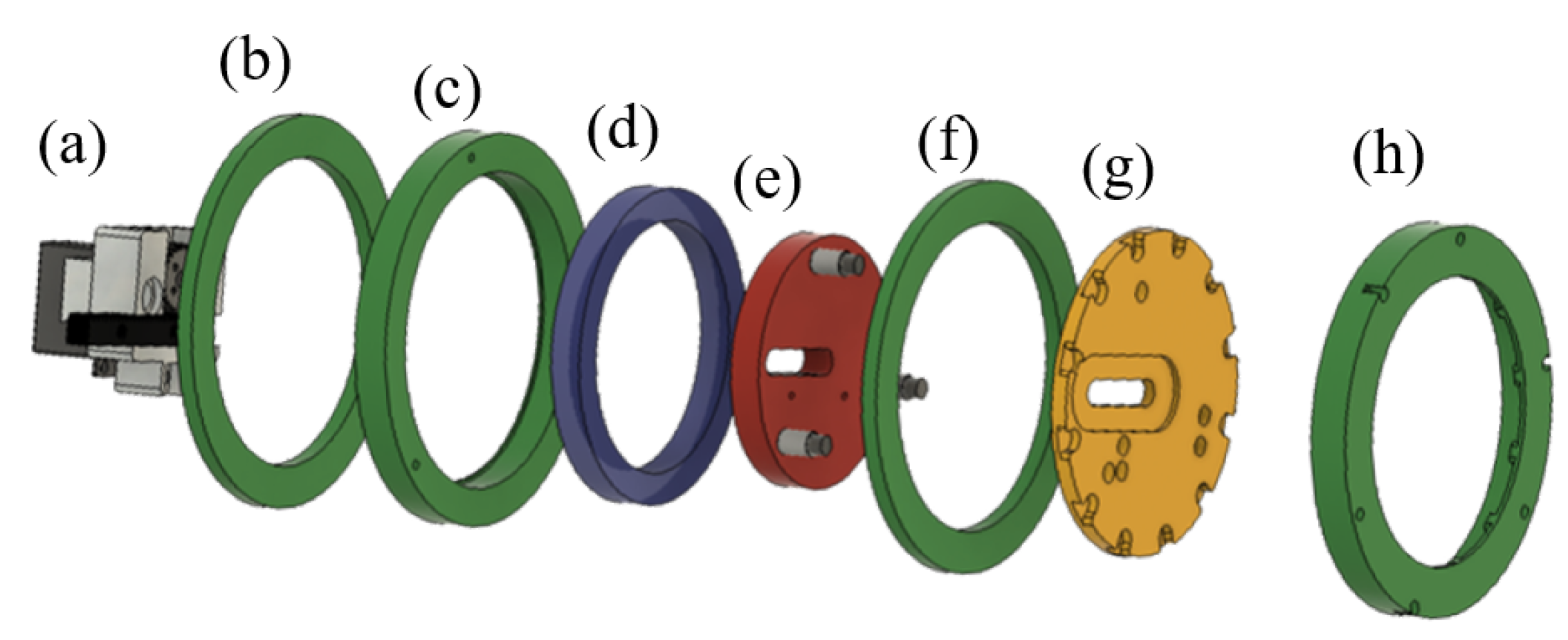
5. Implementation of Axel-Transitional Wheel Mechanism
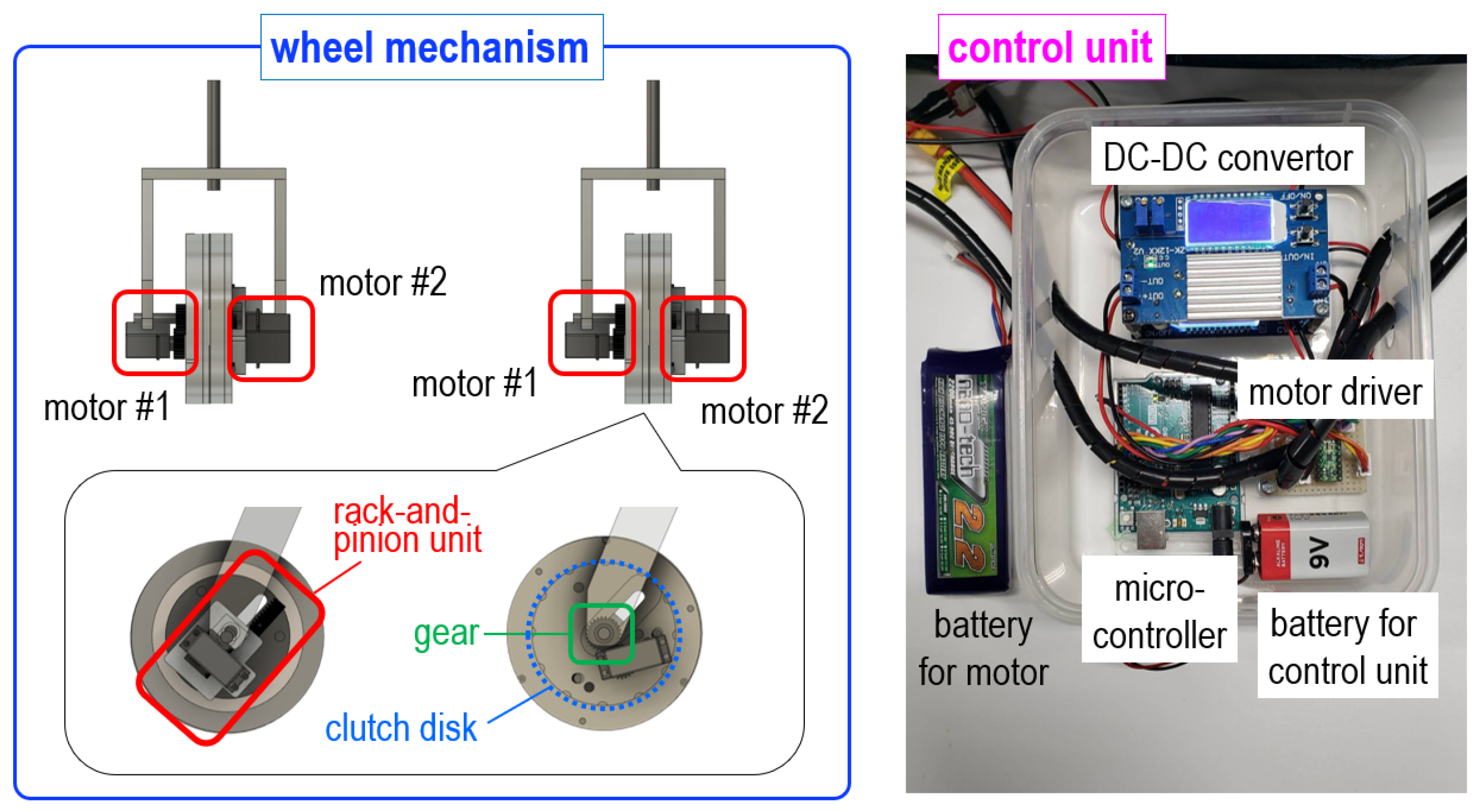
5.1. Details on Wheel Mechanism’s Configuration and Operation
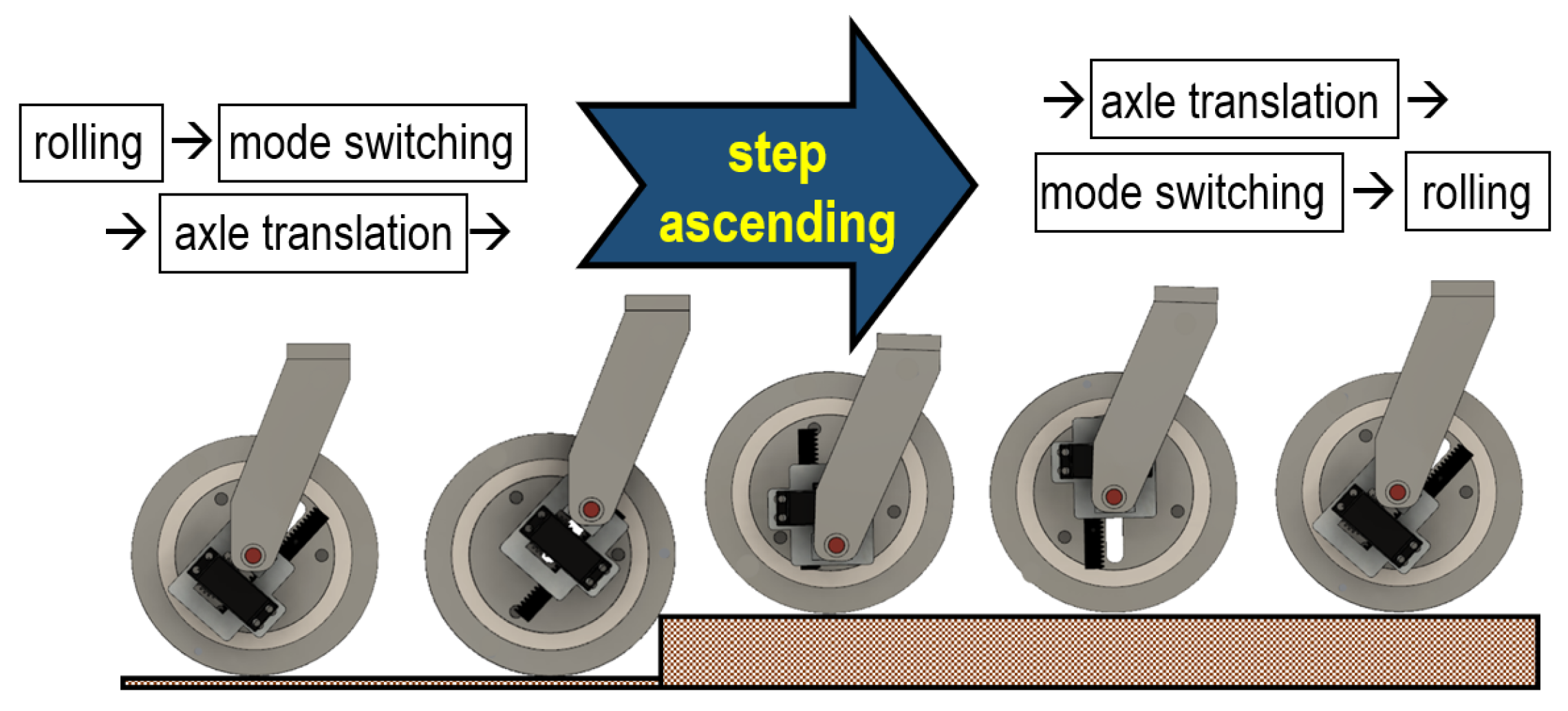
5.2. Step-Ascending Prototype of Axle-Transitional Wheel Mechanism
6. Evaluation Results and Discussion
6.1. Evaluation Directions and Experimental Settings
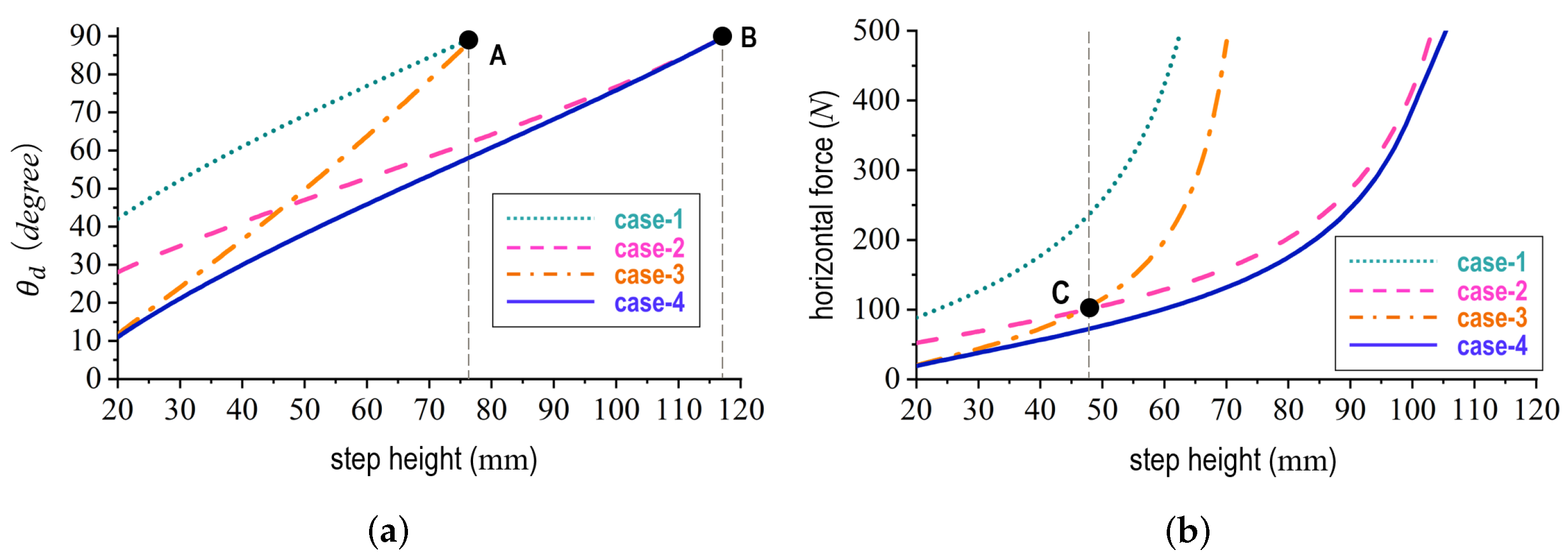
6.2. Simulation Results
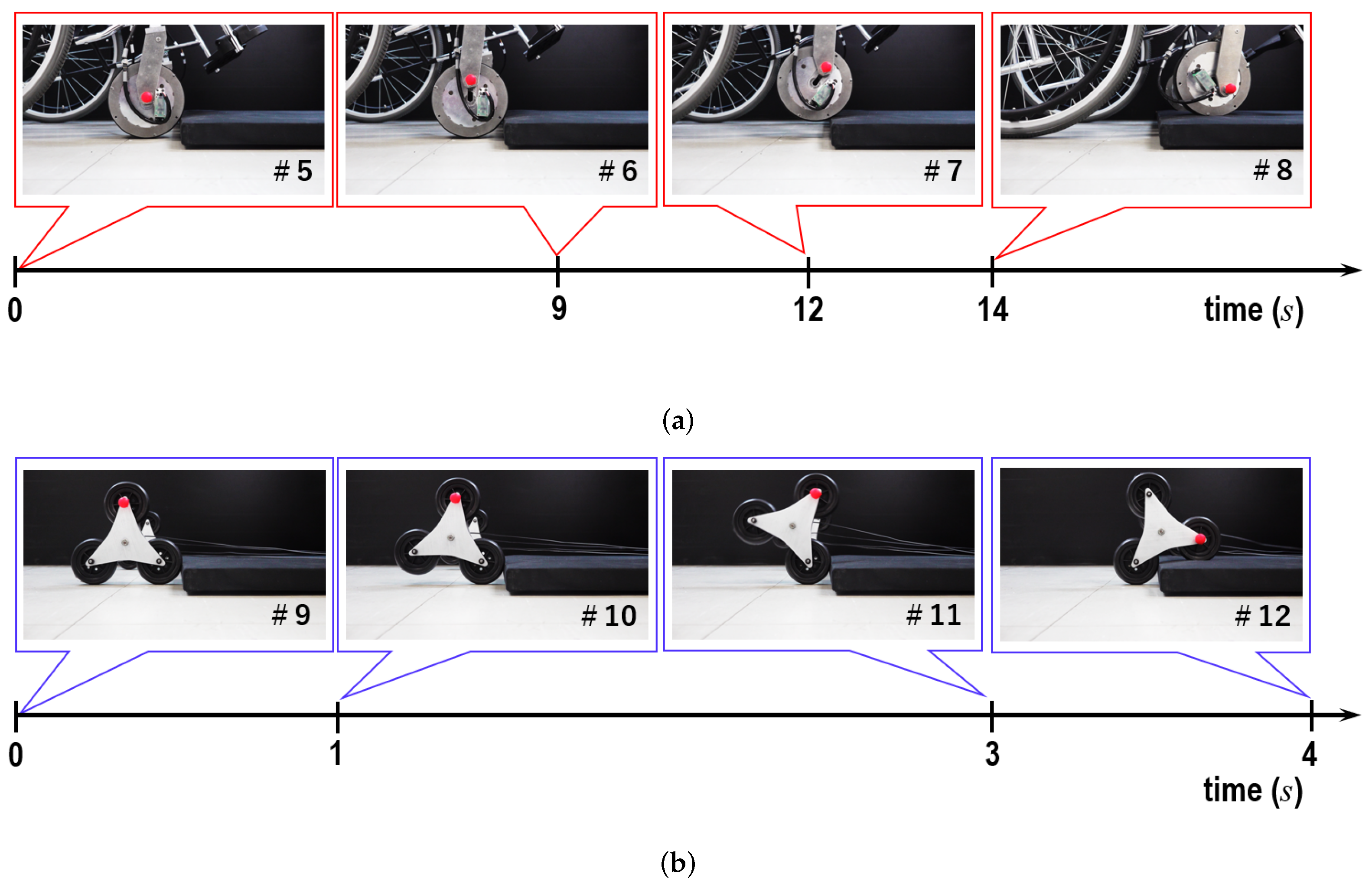
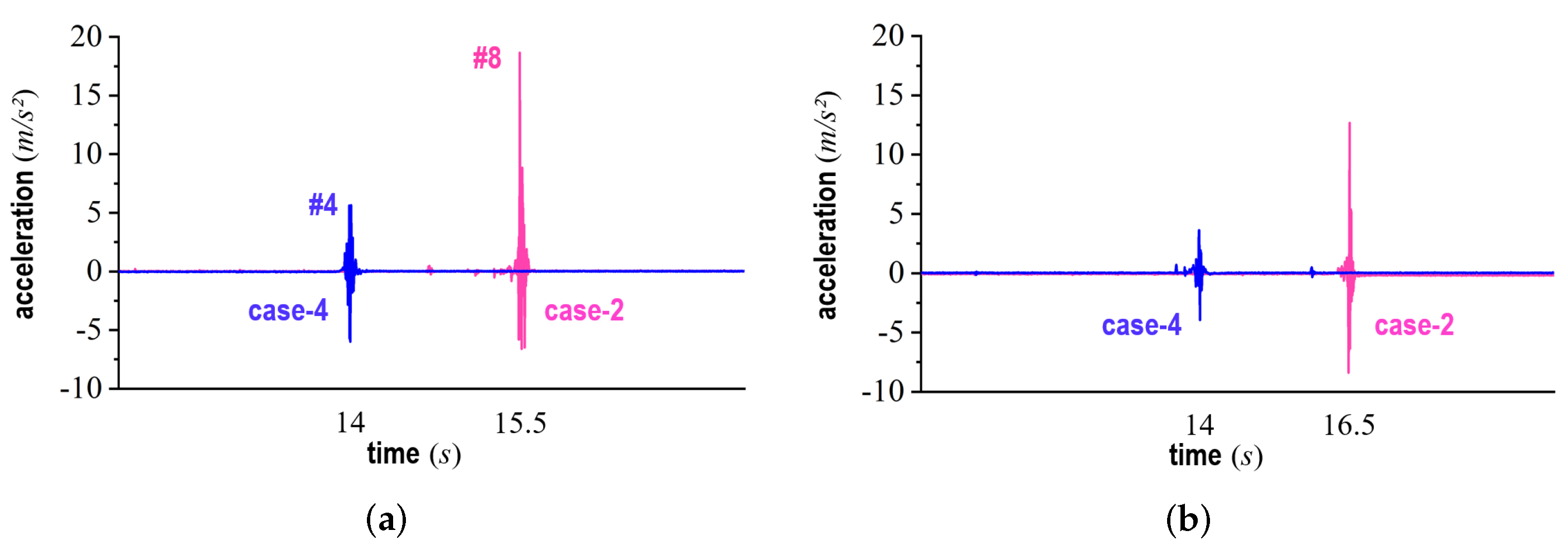
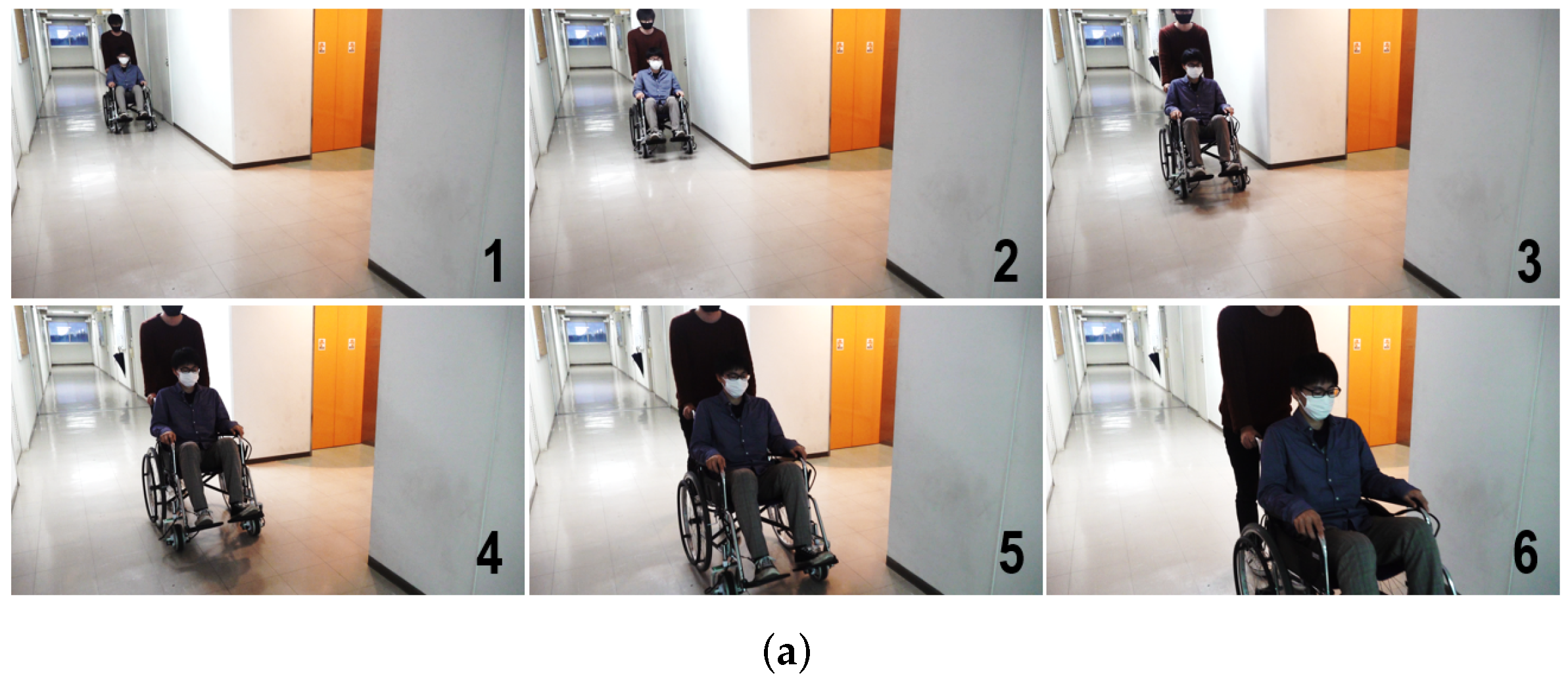
6.3. Experimental Results
6.4. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Mu, X.; Li, L.; Hamza, K.K. Research on steady characteristics of human-robot system for preventing elderly falls during walking. J. Mech. Sci. Technol. 2022, 36, 4775–4788. [Google Scholar] [CrossRef]
- Gonabadi, A.M.; Antonellis, P.; Malcolm, P. A system for simple robotic walking assistance with linear impulses at the center of mass. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1353–1362. [Google Scholar] [CrossRef] [PubMed]
- Matsumoto, N.; Togo, S.; Yokoi, H.; Jiang, Y. Motion Control of a Walking Support Robot Based on Gait Analysis. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics, Dali, China, 6–8 December 2019; pp. 1881–1885. [Google Scholar]
- Ohnuma, T.; Lee, G.; Chong, N.Y. Development of JARoW-II active robotic walker reflecting pelvic movements while walking. Intell. Serv. Robot. 2017, 10, 95–107. [Google Scholar] [CrossRef]
- Lee, G.; Ohnuma, T.; Chong, N.Y.; Lee, S.-G. Walking intent-based movement control for JAIST active robotic walker. IEEE Trans. Syst. Man, Cybern. Syst. 2014, 44, 665–672. [Google Scholar] [CrossRef]
- Phi, L.V.; Fujimoto, Y. A robotic cane for balance maintenance assistance. IEEE Trans. Ind. Inform. 2019, 15, 3998–4009. [Google Scholar] [CrossRef]
- Di, P.; Hasegawa, Y.; Nakagawa, S.; Sekiyama, K.; Fukuda, T.; Huang, J.; Huang, Q. Fall detection and prevention control using walking-aid cane robot. IEEE/ASME Trans. Mechatron. 2016, 21, 625–637. [Google Scholar] [CrossRef]
- Wu, X.; Ma, Y.; Yong, X.; Wang, C.; He, Y.; Li, N. Locomotion Mode Identification and Gait Phase Estimation for Exoskeletons During Continuous Multilocomotion Tasks. IEEE Trans. Cogn. Dev. Syst. 2021, 13, 45–56. [Google Scholar] [CrossRef]
- Wardana, A.A.; Takaki, T.; Jiang, M.; Ishii, I. Development of a single-wheeled inverted pendulum robot capable of climbing stairs. Adv. Robot. 2020, 34, 674–688. [Google Scholar] [CrossRef]
- Hassan, M.; Kadone, H.; Ueno, T.; Hada, Y.; Sankai, Y.; Suzuki, K. Feasibility of synergy-based exoskeleton robot control in hemiplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1233–1242. [Google Scholar] [CrossRef]
- Choukou, M.A.; Best, K.L.; Potvin-Gilbert, M.; Routhier, F.; Lettre, J.; Gamache, S.; Borisoff, J.F.; Gagnon, D. Scoping review of propelling aids for manual wheelchairs. Assist. Technol. 2021, 33, 72–86. [Google Scholar] [CrossRef]
- Chocoteco, J.A.; Morales, R.; Feliu-Batlle, V. Enhancing the trajectory generation of a stair-climbing mobility system. Sensors 2017, 17, 2608. [Google Scholar] [CrossRef] [Green Version]
- Isaacson, M.; Barkay, D. Mobility scooters in urban environments: A research agenda. J. Transp. Health 2020, 18, 100917. [Google Scholar] [CrossRef] [PubMed]
- Akkaya, R.; Kazan, F.A. Design and implementation of a test setup for electric mobility scooter for the disabled. Meas. Control. 2019, 52, 1434–1444. [Google Scholar] [CrossRef]
- Sivakanthan, S.; Blaauw, E.; Greenhalgh, M.; Koontz, A.M.; Vegter, R.; Cooper, R.A. Person transfer assist systems: A literature review. Disabil. Rehabil. Assist. Technol. 2021, 16, 270–279. [Google Scholar] [CrossRef]
- Wu, J.; Shino, M. Hip lift transfer assistive system for reducing burden on caregiver’s waist. Sensors 2021, 21, 7548. [Google Scholar] [CrossRef] [PubMed]
- Blaauw, E.R.; Greenhalgh, M.; Vegter, R.; Bass, S.; Kulich, H.; Grindle, G.G.; Cooper, R.; Koontz, A.M.; Cooper, R.A. Assessment of muscle activation of caregivers performing dependent transfers with a novel robotic-assisted transfer device compared with the hoyer advance. Am. J. Phys. Med. Rehabil. 2021, 100, 885–894. [Google Scholar] [CrossRef]
- Ikeda, H.; Toyama, T.; Maki, D.; Sato, K.; Nakano, E. Cooperative step-climbing strategy using an autonomous wheelchair and a robot. Robot. Auton. Syst. 2021, 135, 103670. [Google Scholar] [CrossRef]
- Jiang, T.-C.; Yin, S.-H.; Tanaka, E. Wheelchair Able to Assist the Elderly to Move on Stairs and Stand Up. In Proceedings of the 2019 58th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hiroshima, Japan, 10–13 September 2019; pp. 1168–1173. [Google Scholar] [CrossRef]
- Hong, J.; Park, G.; Lee, J.; Kim, J.; Kim, H.S.; Seo, T. Performance comparison of adaptive mechanisms of cleaning module to overcome step-shaped obstacles on facades. IEEE Access 2019, 7, 159879–159887. [Google Scholar] [CrossRef]
- Choi, J.-K.; Park, C.S.; Kitagawa, T.; Nakatani, K.; Sugii, H. Passive step-climbing mechanism for a mobility aid. Adv. Robot. 2009, 23, 45–64. [Google Scholar] [CrossRef]
- Nakajima, S. Stair-climbing gait for a four-wheeled vehicle. Robomech. J. 2020, 7, 20. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Lee, Y.; Lee, S.; Kim, J.; Kim, H.S.; Seo, T. STEP: A new mobile platform with 2-DOF transformable wheels for service robots. IEEE/ASME Trans. Mechatron. 2020, 25, 1859–1868. [Google Scholar] [CrossRef]
- Sasaki, K.; Suzuki, K. Active rotary-legs mechanism for stair-climbing mobility vehicle. IEEE Robot. Autom. Lett. 2018, 3, 2237–2244. [Google Scholar] [CrossRef]
- Munakata, Y.; Wada, M. A Novel Step Climbing Strategy for a Wheelchair with Active-Caster add-on Mechanism. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 6324–6329. [Google Scholar] [CrossRef]
- Orita, Y.; Takaba, K.; Fukao, T. Human tracking of a crawler robot in climbing stairs. J. Robot. Mechatron. 2021, 33, 1338–1348. [Google Scholar] [CrossRef]
- Pan, L.-H.; Kuo, C.-N.; Huang, C.-Y.; Chou, J.J. The claw-wheel transformable hybrid robot with reliable stair climbing and high maneuverability. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering, Fort Worth, TX, USA, 21–25 April 2016; pp. 233–238. [Google Scholar]
- Herbert, S.D.; Drenner, A.; Papanikolopoulos, N. Loper: A Quadruped-Hybrid Stair Climbing Robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 799–804. [Google Scholar]
- Yamauchi, B.M. PackBot: A versatile platform for military robotics. Proc. SPIE 2004, 5422, 228–237. [Google Scholar]
- Sasaki, K.; Eguchi, Y.; Suzuki, K. Stair-climbing wheelchair with lever propulsion control of rotary legs. Adv. Robot. 2020, 34, 802–813. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.; Togami, N.; Hayakawa, Y.; Tamura, H. Two Functional Wheel Mechanism Capable of Step Ascending for Personal Mobility Aids. Electronics 2023, 12, 1399. https://doi.org/10.3390/electronics12061399
Lee G, Togami N, Hayakawa Y, Tamura H. Two Functional Wheel Mechanism Capable of Step Ascending for Personal Mobility Aids. Electronics. 2023; 12(6):1399. https://doi.org/10.3390/electronics12061399
Chicago/Turabian StyleLee, Geunho, Naohisa Togami, Yusuke Hayakawa, and Hiroki Tamura. 2023. "Two Functional Wheel Mechanism Capable of Step Ascending for Personal Mobility Aids" Electronics 12, no. 6: 1399. https://doi.org/10.3390/electronics12061399