

Novel Neural-Network-Based Fuel Consumption Prediction Models Considering Vehicular Jerk

 ,
,  ,
,
Abstract
:1. Introduction
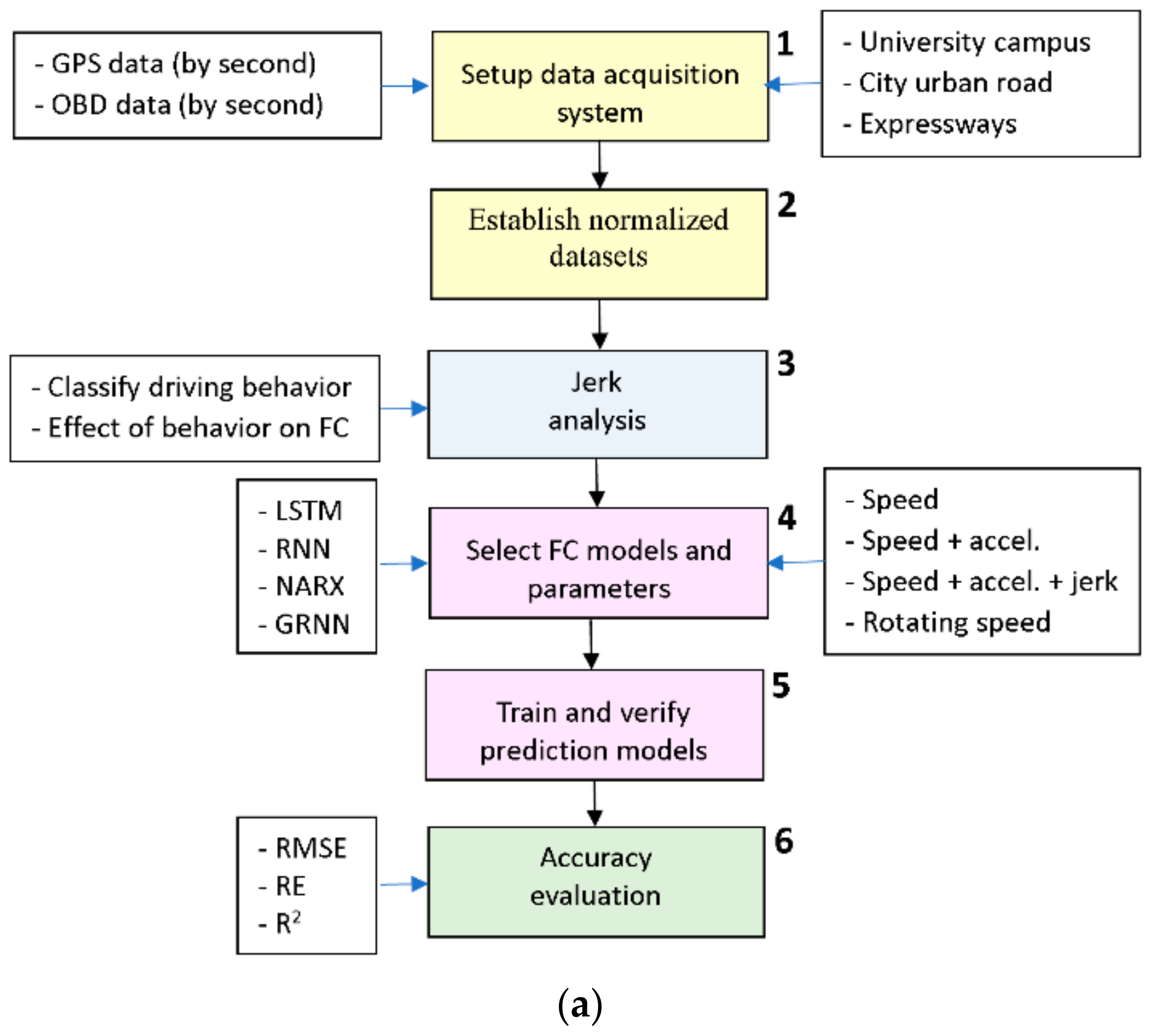
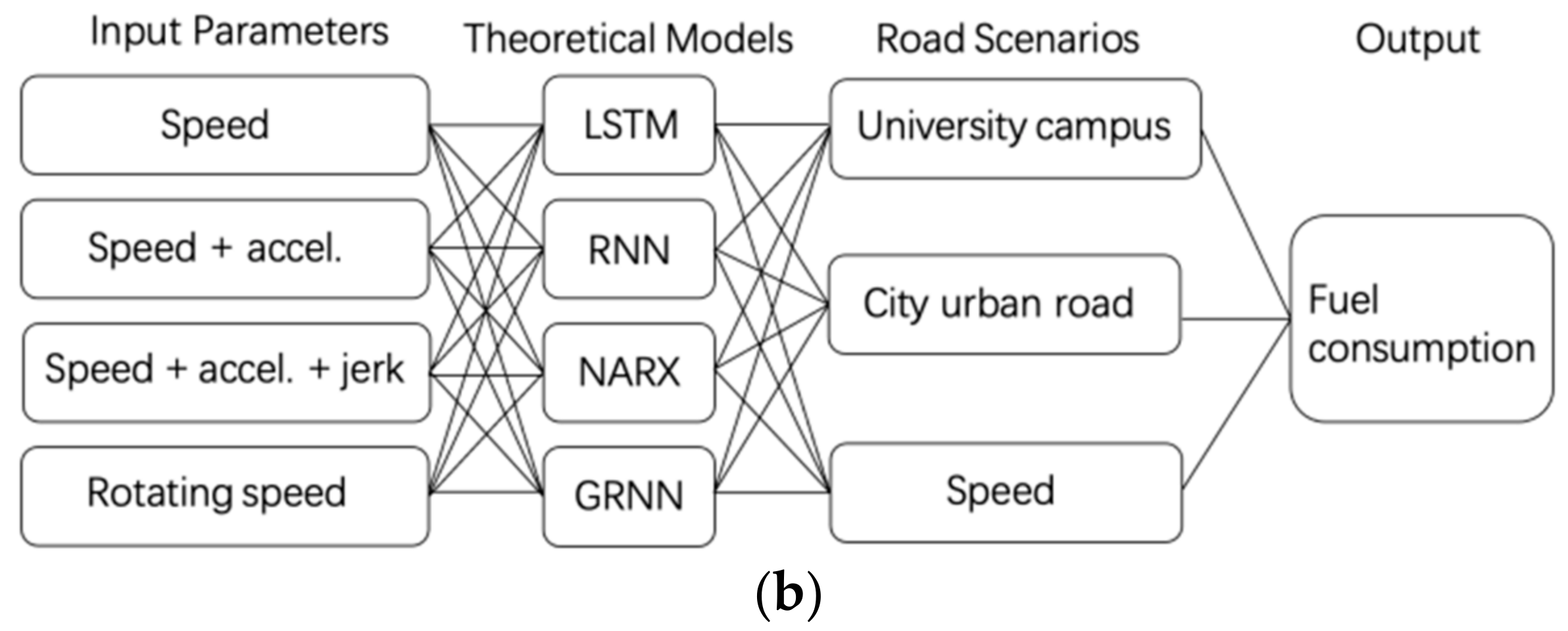
2. Research Framework
3. Data Description and Preprocessing
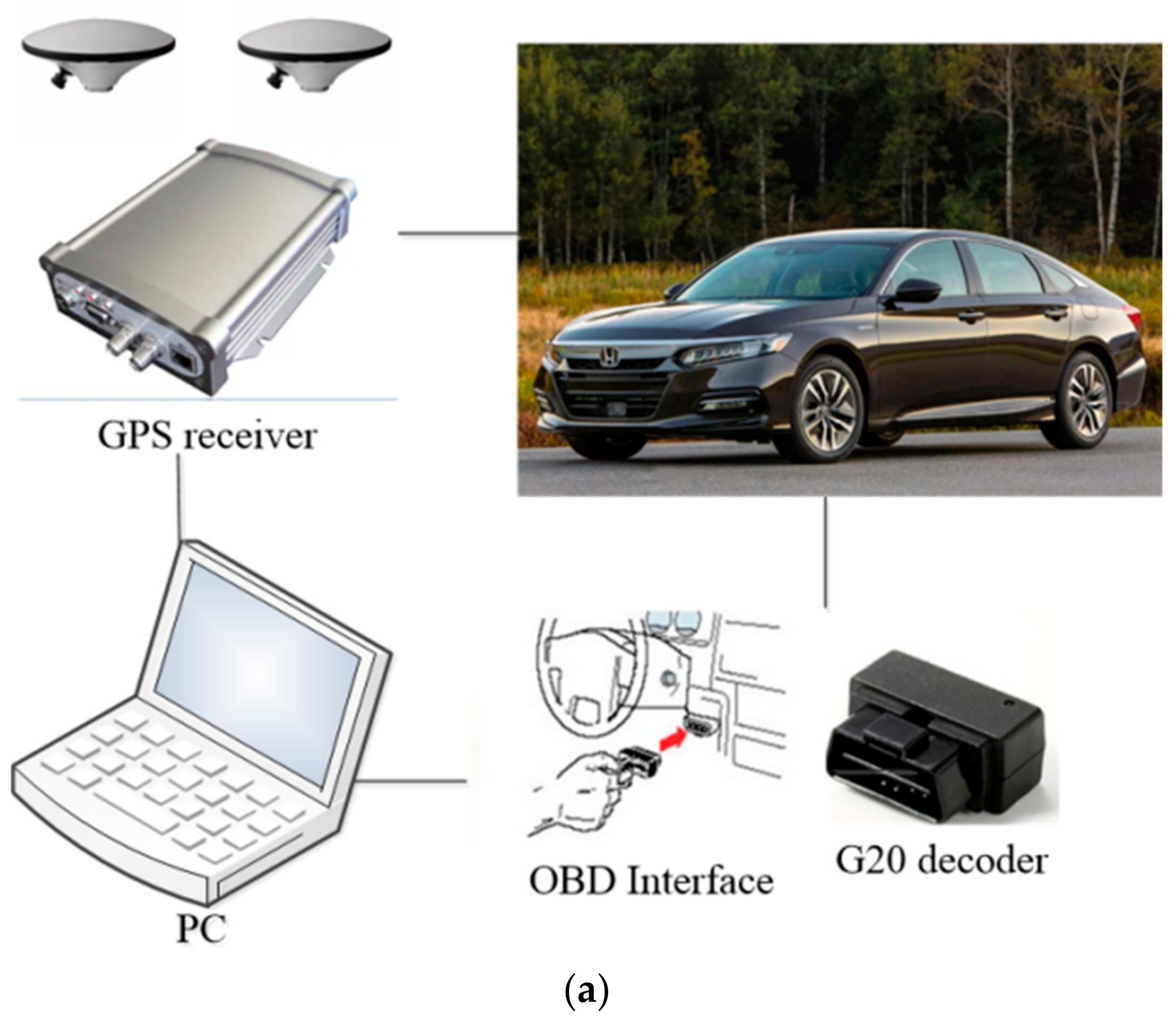
3.1. Data Description
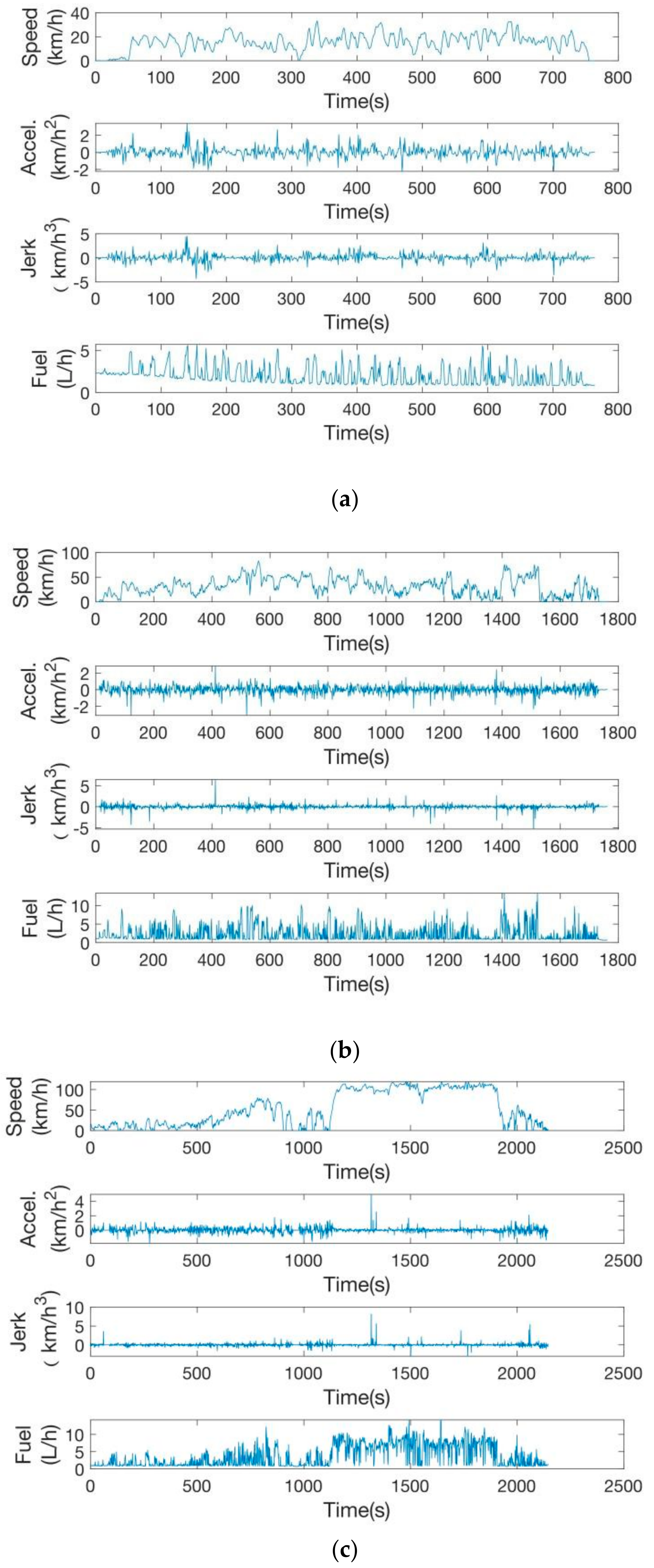
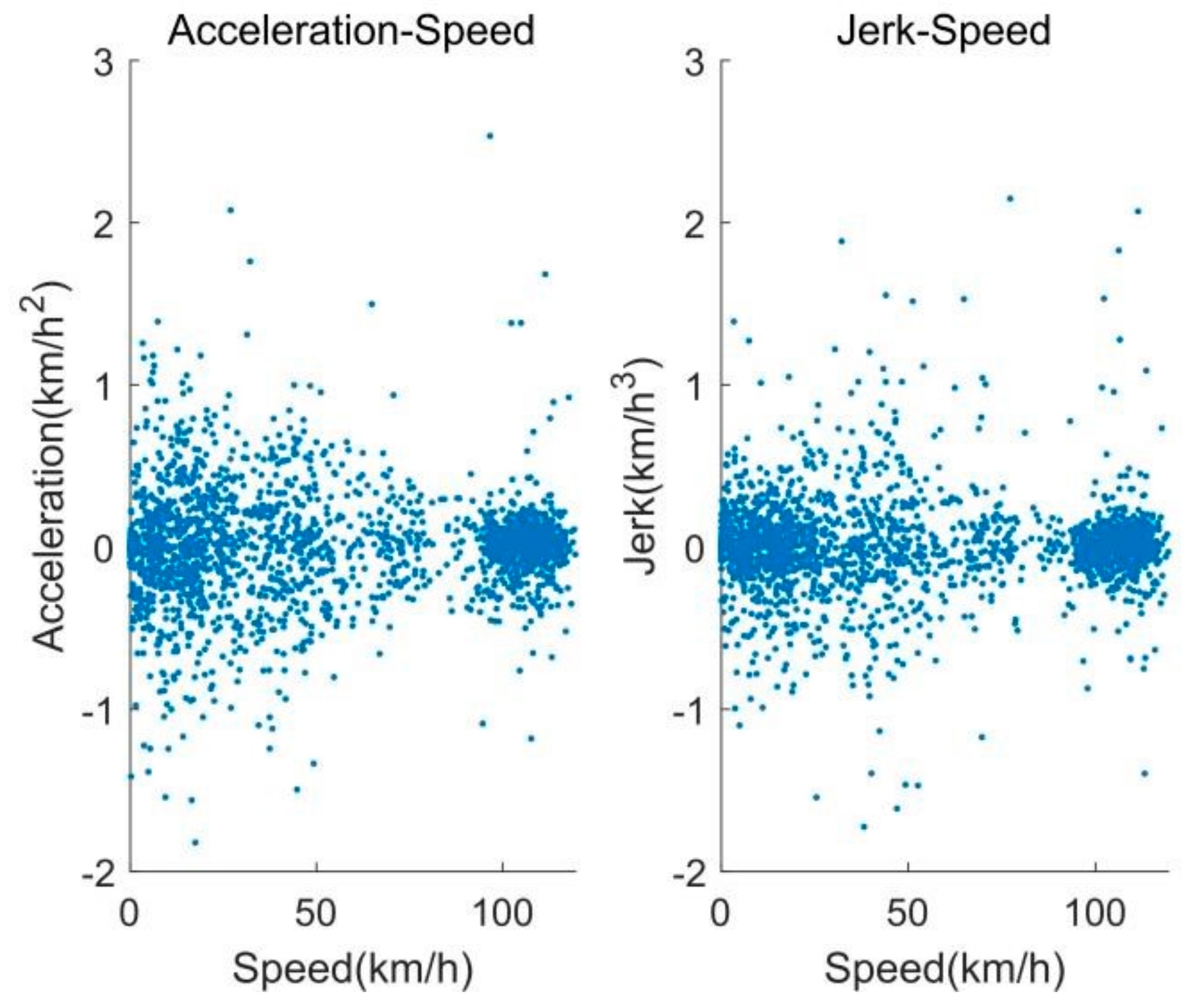
3.2. Data Analysis
3.3. Data Preprocessing
4. Classification of Driving Behaviors Based on Jerk and Its Effects on Fuel Consumption
4.1. Introduction of Jerk
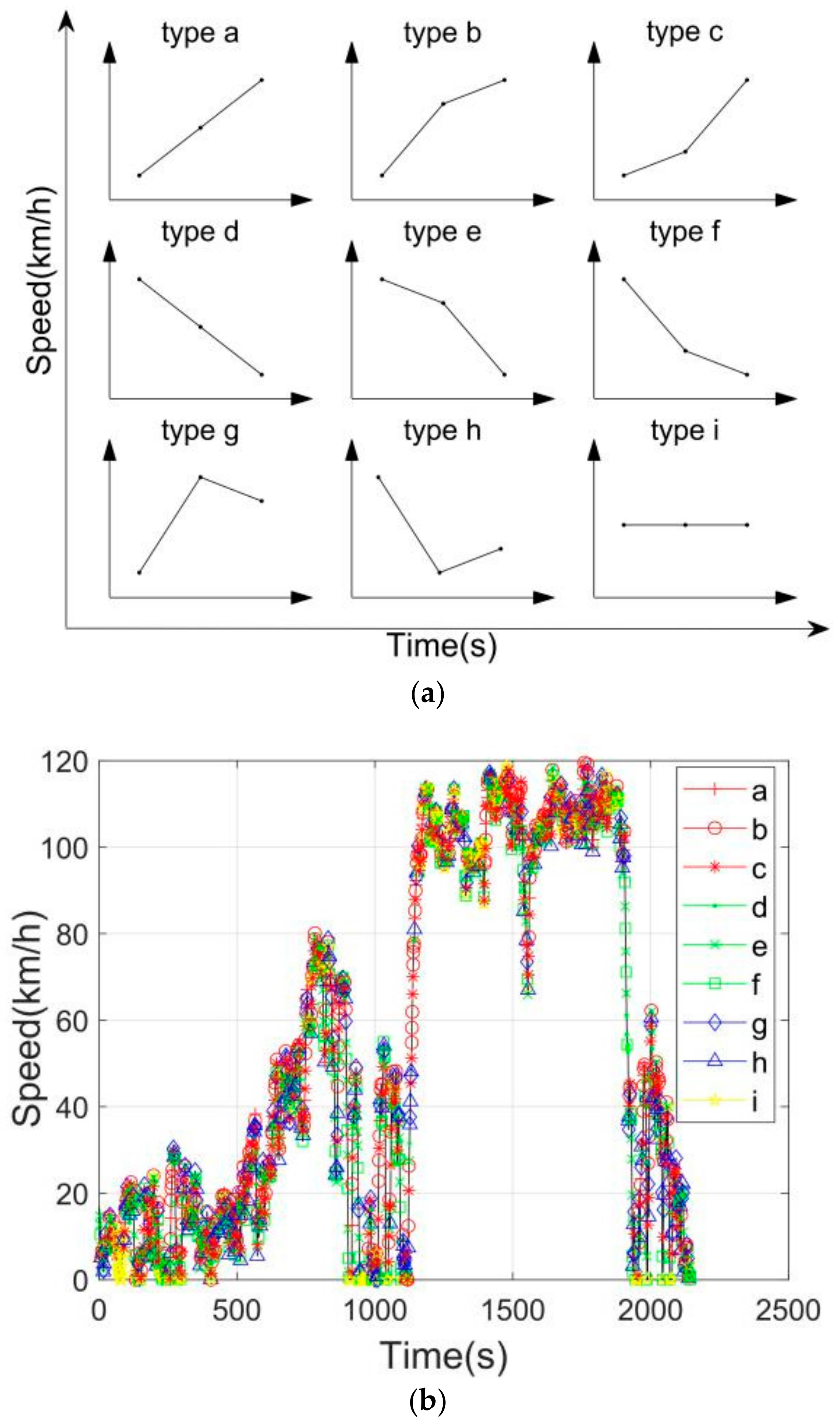
4.2. Driving Behavior Classification Based on Jerk
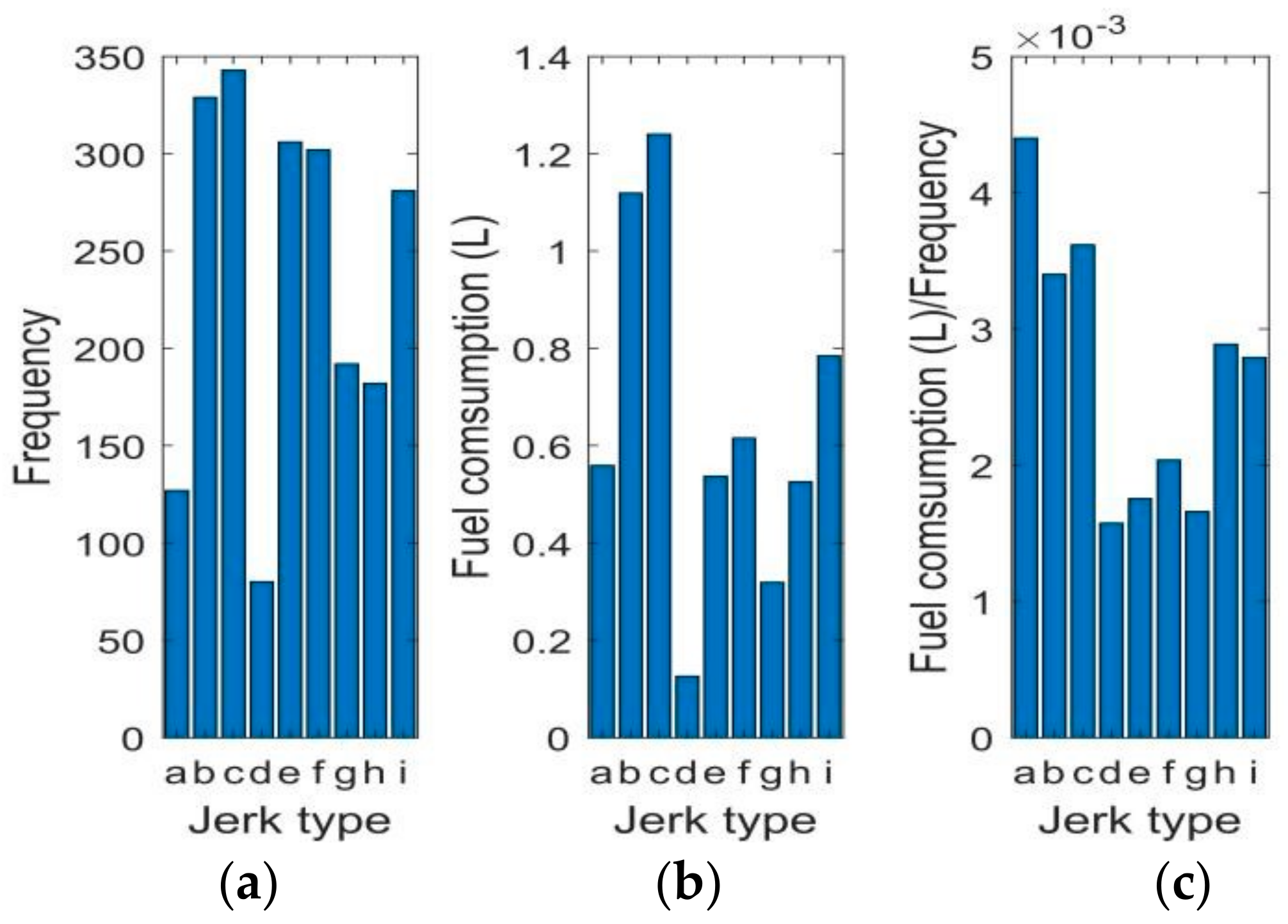
4.3. Effect of Jerk on Fuel Consumption
5. Experimental Modelling
5.1. Modelling
5.2. Model Calibration and Verification
6. Analysis of Experimental Results
6.1. Evaluation Indices
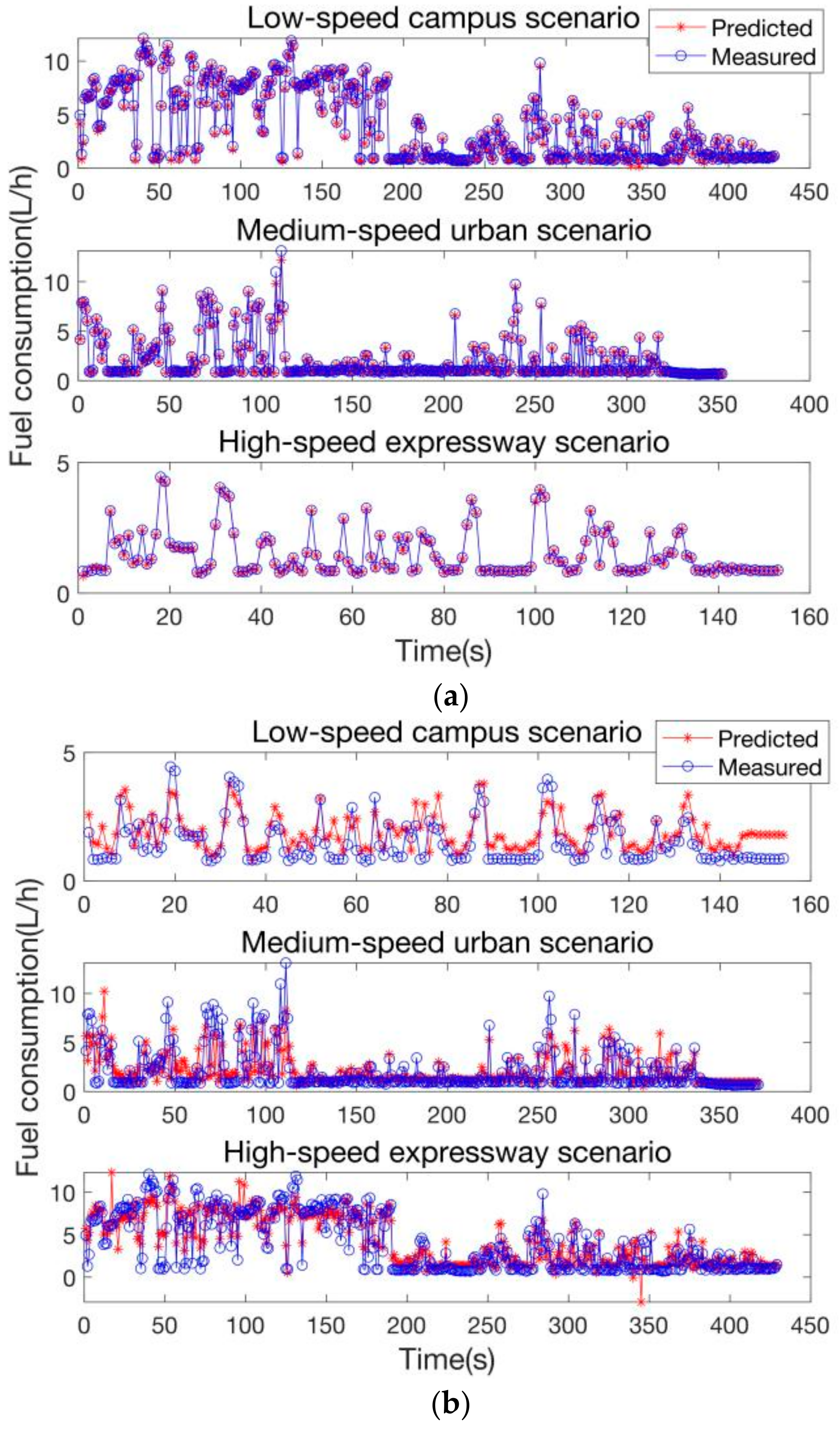
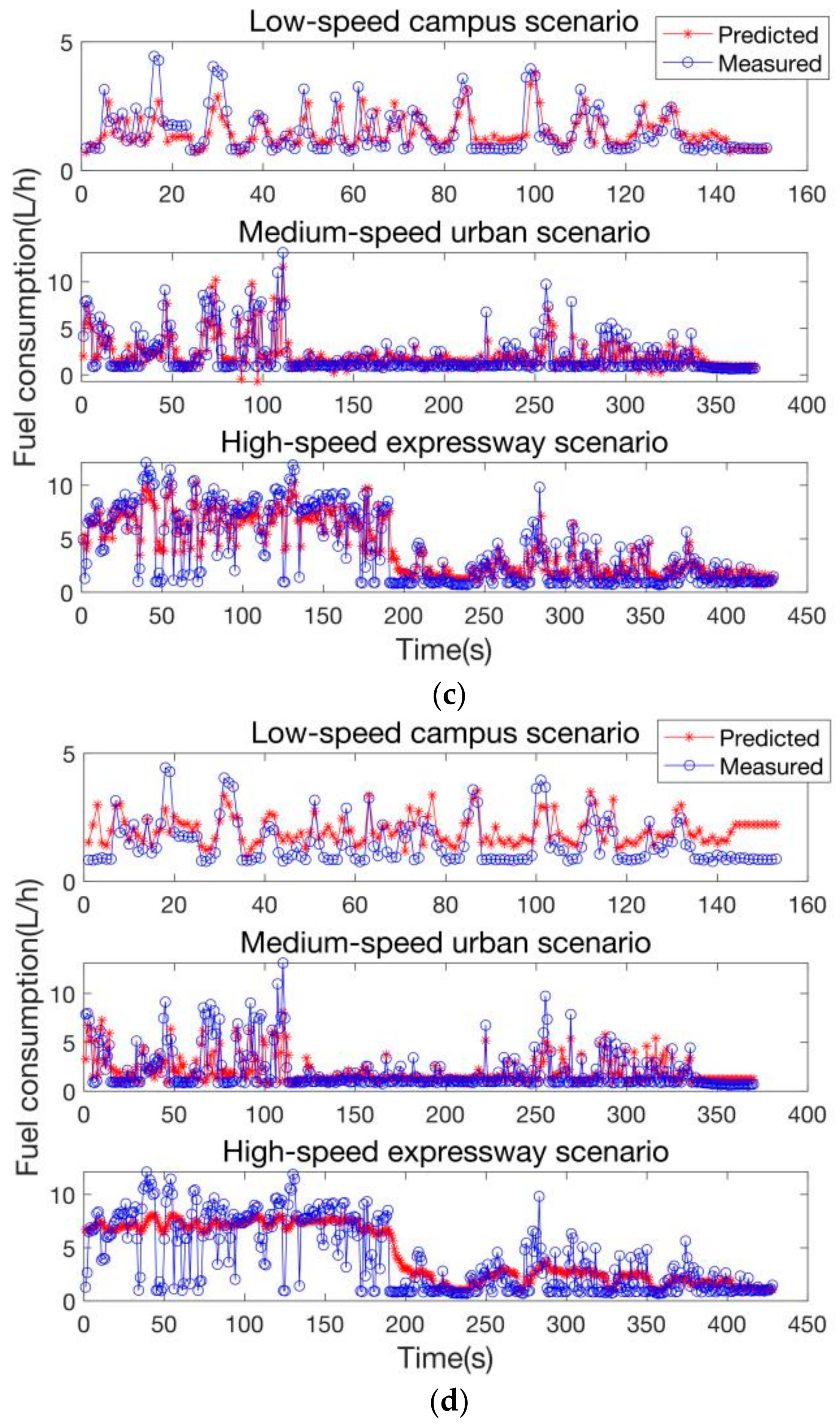
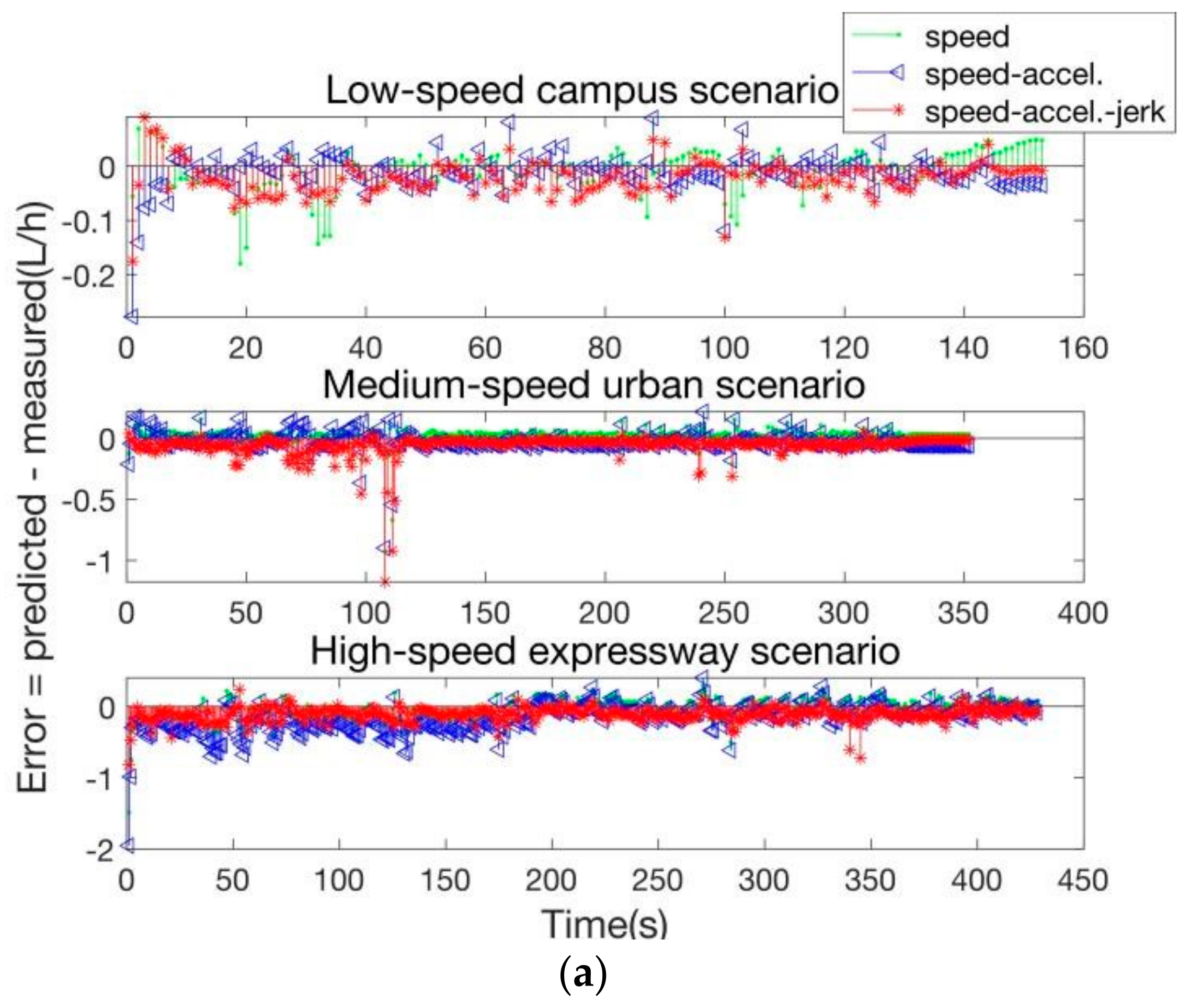
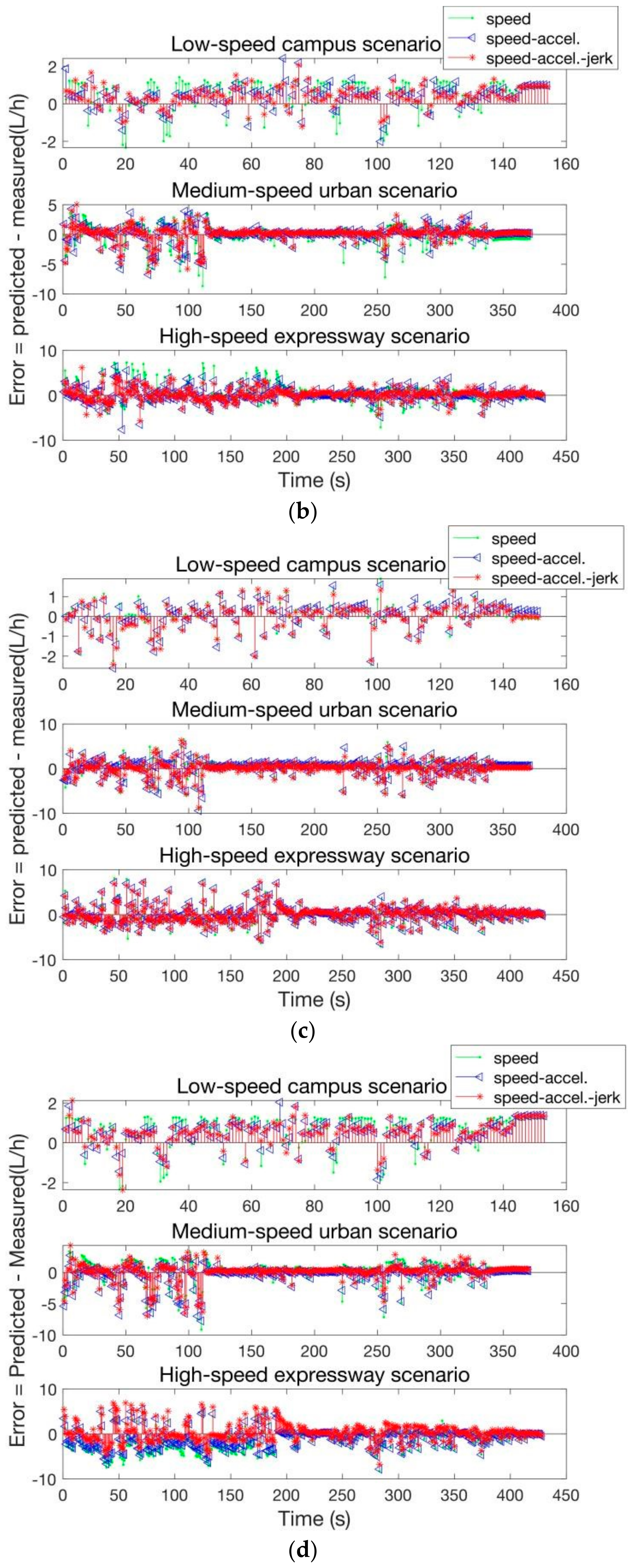
6.2. Experimental Analysis of Each Neural Network Model under Different Input Conditions
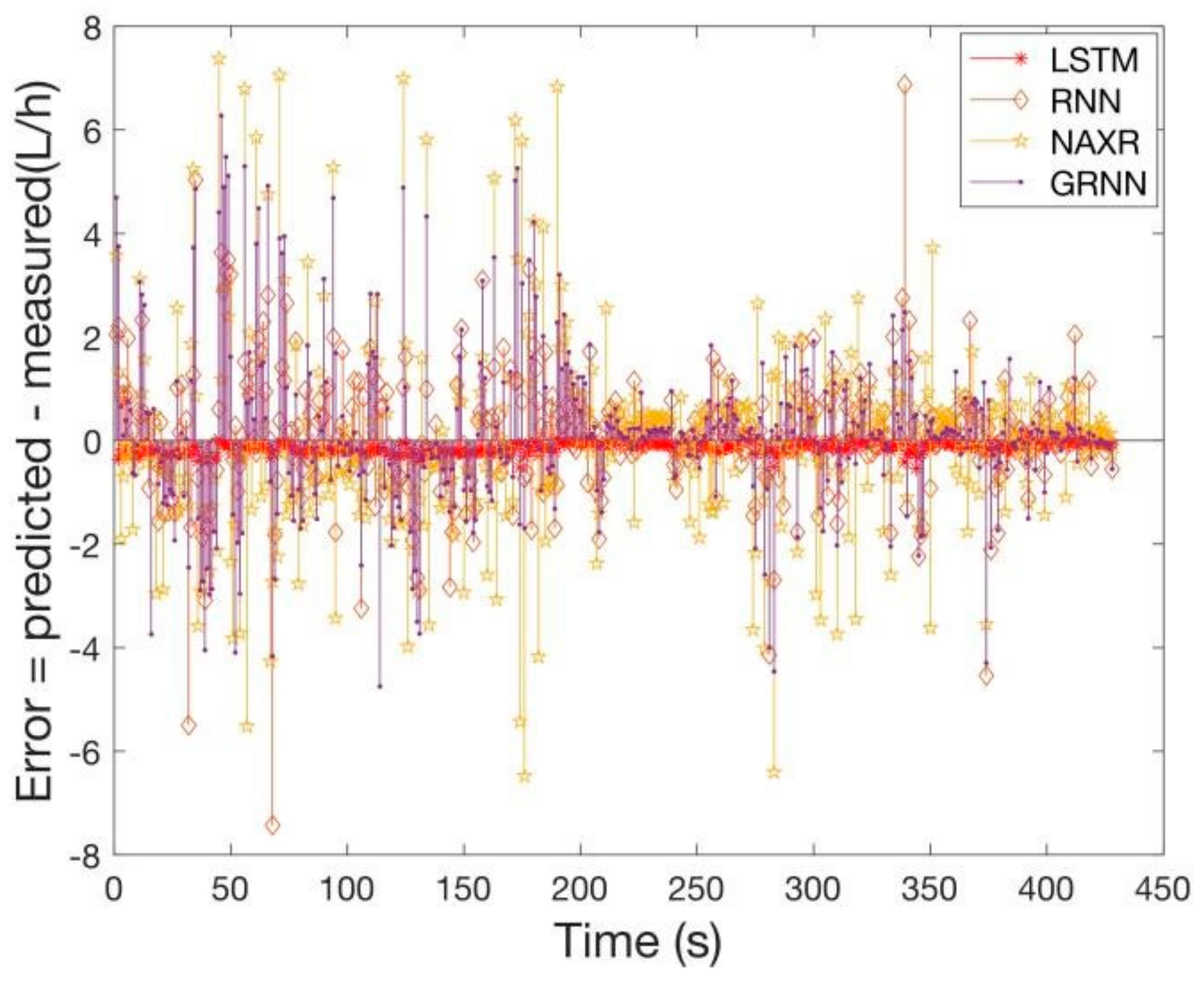
6.3. Comparison of FCP Models Using Neural Network
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The State of the Global Climate; World Meteorological Organization: Washington, DC, USA, 2020.
- Fu, L.; He, K.; He, D.; Tang, Z.; Hao, J. A study on models of mobile source emission factors. Acta Sci. Circumstantiae 1997, 17, 474–479. (In Chinese) [Google Scholar]
- Ma, Y.; Lau, A.K.H.; Louie, P.K.K.; Li, T.; Luan, S. Application of vehicular emission models and comparison of their adaptability. Acta Sci. Nat. Univ. Pekin. 2008, 44, 308–316. [Google Scholar]
- California Air Resource Board. EMFAC User’s Guide; California Air Resource Board: Sacramento, CA, USA, 2020.
- Guo, H.; Zhang, Q.; Shi, Y.; Wang, D. Evaluation of the International Vehicle Emission (IVE) model with on-road remote sensing measurements. J. Environ. Sci. 2007, 19, 818–826. [Google Scholar] [CrossRef] [PubMed]
- Barth, M.; An, F.; Norbeck, J.; Ross, M. Modal emissions modelling: A physical approach. J. Transp. Res. Board 1996, 1520, 81–88. [Google Scholar] [CrossRef]
- An, F.; Barth, M.; Norbeck, J.; Ross, M. Development of comprehensive modal emissions model: Operating under hot-stabilized conditions. J. Transp. Res. Board 1997, 1587, 52–62. [Google Scholar] [CrossRef]
- Barth, M.; Younglove, T.; Wenzel, T.; Score, G.; An, F.; Ross, M.; Norbeck, J. Analysis of modal emissions from diverse in-use vehicle fleet. Transp. Res. Rec. J. Transp. Res. Board 1997, 1587, 73–84. [Google Scholar] [CrossRef]
- Jiménez-Palacios, L.J. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing; Massachusetts Institute of Technology: Cambridge, MA, USA, 1999. [Google Scholar]
- Rakha, H.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar] [CrossRef]
- Rahimi-Ajdadi, F.; Abbaspour-Gilandeh, Y. Artificial neural network and stepwise multiple range regression method for predicting fuel consumption of tractors. Measurement 2011, 44, 2104–2111. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, Y.; Wu, Y.; Chen, C.; Rong, J. Research on combined prediction model of driving energy consumption based on principal component analysis and BP neural network. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 185–204. [Google Scholar]
- Wu, J.; Liu, J. Development of a predictive system for car fuel consumption using an artificial neural network. Expert Syst. Appl. 2011, 38, 4967–4971. [Google Scholar] [CrossRef]
- Topić, J.; Škugor, B.; Deur, J. Neural Network-Based Prediction of Vehicle Fuel Consumption Based on Driving Cycle Data. Sustainability 2022, 14, 744. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Zhao, W. Investigating long-term vehicle speed prediction based on BP-LSTM algorithms. IET Intell. Transp. Syst. 2019, 13, 1281–1290. [Google Scholar]
- Fitters, W.; Cuzzocrea, A.; Hassani, M. Enhancing LSTM prediction of vehicle traffic flow data via outlier correlations. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 210–217. [Google Scholar]
- Zhu, W.; Wu, J.; Fu, T.; Wang, J.; Shangguan, Q. Dynamic prediction of traffic incident duration on urban expressways: A deep learning approach based on LSTM and MLP. J. Intell. Connect. Veh. 2021, 4, 80–91. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Phan, H.; Andreotti, F.; Cooray, N.; Chén, O.Y.; De Vos, M. SeqSleepNet: End-to-end hierarchical recurrent neural network for sequence-to-sequence automatic sleep staging. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 400–410. [Google Scholar] [CrossRef] [PubMed]
- Quan, R.; Zhu, L.; Wu, Y.; Yang, Y. Holistic LSTM for pedestrian trajectory prediction. I-EEE Trans. Image Process. 2021, 30, 3229–3239. [Google Scholar] [CrossRef] [PubMed]
- Doğan, E. Analysis of the relationship between LSTM network traffic flow prediction performance and statistical characteristics of standard and nonstandard data. J. Forecast. 2020, 39, 1213–1228. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, K.; Zhao, X.; Asad, J. New fuel consumption model considering vehicular speed, acceleration, and jerk. J. Intell. Transp. Syst. 2023, 27, 174–186. [Google Scholar] [CrossRef]
- Xu, Z.; Wei, T.; Easa, S.; Zhao, X.; Qu, X. Modelling relationship between truck fuel consumption and driving behavior using data from internet of vehicles. Comput-Aided Civ. Infrastruct. Eng. 2018, 33, 209–219. [Google Scholar] [CrossRef]
- Ahn, K.; Rakha, H.; Trani, A.; Van Aerde, M. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels. J. Transp. Eng. 2002, 128, 182–190. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time | Lon 1 (°N) | Lat 2 (°E) | Alt 3 (km) | Speed (km/h) | RS 4 (r/min) | Ins Fuel 5 (L/h) | Cum Fuel 6 (L) | Mileage (km) |
|---|---|---|---|---|---|---|---|---|---|
| 16 January 2021 | 18:52:02 | 3413.911 | 10,856.648 | 377.8952 | 16.76367 | 1119 | 0.92 | 224.90558 | 1,677,555 |
| 16 January 2021 | 18:52:03 | 3413.912 | 10,856.644 | 379.1028 | 15.85518 | 902 | 0.88 | 224.90590 | 1,677,561 |
| 16 January 2021 | 18:52:04 | 3413.912 | 10,856.641 | 379.4774 | 14.73993 | 859 | 0.94 | 224.90612 | 1,677,565 |
| 16 January 2021 | 18:52:05 | 3413.912 | 10,856.639 | 379.5281 | 12.65565 | 864 | 0.96 | 224.90636 | 1,677,568 |
| 16 January 2021 | 18:52:06 | 3413.912 | 10,856.637 | 379.4510 | 10.48305 | 875 | 0.93 | 224.90668 | 1,677,572 |
| 16 January 2021 | 18:52:07 | 3413.912 | 10,856.635 | 379.2913 | 7.57523 | 840 | 0.94 | 224.90692 | 1,677,574 |
| 16 January 2021 | 18:52:08 | 3413.912 | 10,856.633 | 379.1885 | 6.20904 | 749 | 0.93 | 224.90724 | 1,677,577 |
| Input | Campus | City | Expressway | ||||||
|---|---|---|---|---|---|---|---|---|---|
| V 1 | A 2 | J 3 | V 1 | A 2 | J 3 | V 1 | A 2 | J 3 | |
| Average | 15.48 | 0.04 | 0.67 | 30.76 | 1.52 × 10−4 | −0.01 | 53.26 | 0.01 | 0.01 |
| Max | 33.28 | 3.41 | 4.49 | 82.72 | 2.83 | 6.44 | 119.49 | 4.94 | 8.14 |
| Min | 0.01 | −2.22 | −4.29 | 0 | −3.10 | −5.31 | 0 | −1.82 | −2.99 |
| Variance | 49.97 | 0.34 | 0.59 | 311.60 | 0.20 | 0.24 | 1.80 × 103 | 0.12 | 0.17 |
| Raw Data | Normalized Data | ||||||
|---|---|---|---|---|---|---|---|
| Speed (km/h) | Acceleration (km/h2) | Jerk (km/h3) | Fuel (L) | Speed | Acceleration | Jerk | Fuel |
| 15.9000 | −0.1000 | 0.5000 | 0.8800 | 0.1338 | 0.2537 | 0.2963 | 0.0148 |
| 14.7000 | −0.2000 | −0.3000 | 0.9400 | 0.1237 | 0.2388 | 0.2222 | 0.0192 |
| 12.7000 | −0.6000 | −0.2000 | 0.9600 | 0.1069 | 0.1791 | 0.2315 | 0.0207 |
| 10.5000 | −0.2000 | 0.2000 | 0.9300 | 0.0884 | 0.2388 | 0.2685 | 0.0185 |
| 7.6000 | −0.7000 | −0.1000 | 0.9400 | 0.0640 | 0.1642 | 0.2407 | 0.0192 |
| Variable | Variable Description | |
|---|---|---|
| Input | Vehicle speed | |
| Vehicle acceleration speed | ||
| Vehicle jerk speed | ||
| Fuel consumption at time t | ||
| r(t) | Rotating speed | |
| Output | Fuel consumption at the next time step |
| Neural Network | Input | Network Layer | Parameter Setting | Output |
|---|---|---|---|---|
| LSTM | Speed, acceleration, jerk, rotating speed | Hidden neurons | 60 × 180 × 60 | Fuel consumption |
| Dropout layers | 0.2 × 0.3 × 0.2 | |||
| RNN | Hidden neurons | 10 | ||
| NARX | Hidden neurons | 10 | ||
| Delays d | 2 | |||
| GRNN | Hidden neurons | Number of samples |
| Parameter Combination | Model | Driving Scenario | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Campus | City | Expressway | ||||||||
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||
| Rotating speed | LSTM | 0.030 | 0.033 | 0.998 | 0.029 | 0.018 | 0.998 | 0.090 | 0.067 | 0.994 |
| RNN | 0.485 | 0.219 | 0.796 | 0.748 | 0.299 | 0.822 | 1.359 | 0.548 | 0.779 | |
| NARX | 0.485 | 0.229 | 0.795 | 1.704 | 0.535 | 0.773 | 1.670 | 0.624 | 0.665 | |
| GRNN | 0.521 | 0.247 | 0.765 | 0.884 | 0.425 | 0.820 | 1.679 | 0.613 | 0.740 | |
| Speed– acceleration– jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 |
| RNN | 0.466 | 0.200 | 0.811 | 1.271 | 0.374 | 0.610 | 1.242 | 0.385 | 0.842 | |
| NARX | 0.377 | 0.153 | 0.875 | 1.510 | 0.647 | 0.451 | 1.607 | 0.489 | 0.736 | |
| GRNN | 0.545 | 0.234 | 0.743 | 1.528 | 0.506 | 0.463 | 1.543 | 0.483 | 0.781 | |
| Speed– acceleration | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 |
| RNN | 0.512 | 0.225 | 0.771 | 1.448 | 0.457 | 0.517 | 1.450 | 0.450 | 0.806 | |
| NARX | 0.574 | 0.267 | 0.712 | 1.688 | 0.686 | 0.318 | 1.840 | 0.640 | 0.688 | |
| GRNN | 0.624 | 0.330 | 0.663 | 1.581 | 0.528 | 0.424 | 1.709 | 0.520 | 0.731 | |
| Speed | LSTM | 0.054 | 0.047 | 0.995 | 0.055 | 0.065 | 0.988 | 0.065 | 0.051 | 0.988 |
| RNN | 0.732 | 0.345 | 0.674 | 1.915 | 0.494 | 0.479 | 2.070 | 0.764 | 0.664 | |
| NARX | 0.753 | 0.301 | 0.576 | 1.827 | 0.746 | 0.307 | 1.906 | 0.713 | 0.609 | |
| GRNN | 0.698 | 0.423 | 0.574 | 1.724 | 0.689 | 0.405 | 1.928 | 0.638 | 0.694 | |
| Driving Scenario | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Campus | City | Expressway | |||||||
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | |
| LSTM | −17.5% | −29.2% | +0.1% | −40.9% | −68.2% | +0.7% | −14.3% | −28.3% | +9.7% |
| RNN | −8.9% | −11.0% | +5.2% | −12.2% | −18.0% | +18.0% | −14.3% | −14.4% | +4.5% |
| NARX | −34.3% | −43.0% | +22.9% | −10.5% | −5.7% | +41.8% | −12.7% | −23.6% | +7.0% |
| GRNN | −12.7% | −29.0% | +13.3% | −3.4% | −4.2% | +9.2% | −9.7% | −7.1% | +6.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Ya, J.; Xu, Z.; Easa, S.; Peng, K.; Xing, Y.; Yang, R. Novel Neural-Network-Based Fuel Consumption Prediction Models Considering Vehicular Jerk. Electronics 2023, 12, 3638. https://doi.org/10.3390/electronics12173638
Zhang L, Ya J, Xu Z, Easa S, Peng K, Xing Y, Yang R. Novel Neural-Network-Based Fuel Consumption Prediction Models Considering Vehicular Jerk. Electronics. 2023; 12(17):3638. https://doi.org/10.3390/electronics12173638
Chicago/Turabian StyleZhang, Licheng, Jingtian Ya, Zhigang Xu, Said Easa, Kun Peng, Yuchen Xing, and Ran Yang. 2023. "Novel Neural-Network-Based Fuel Consumption Prediction Models Considering Vehicular Jerk" Electronics 12, no. 17: 3638. https://doi.org/10.3390/electronics12173638