
Rotated Object Detection with Circular Gaussian Distribution

 , , , and
, , , and
Abstract
:1. Introduction
- We propose a new paradigm for angular prediction, namely CGD. It effectively avoids the shortcomings of previous approaches.
- We design a rotated object detector, based on CenterNet, which can improve the overall efficiency of the detection model.
- We conduct extensive experiments on various public datasets to verify the effectiveness and superior performances of our approaches.
2. Related Work
2.1. Horizontal Object Detection Method
2.2. Rotated Object Detection Method
3. Proposed Approach
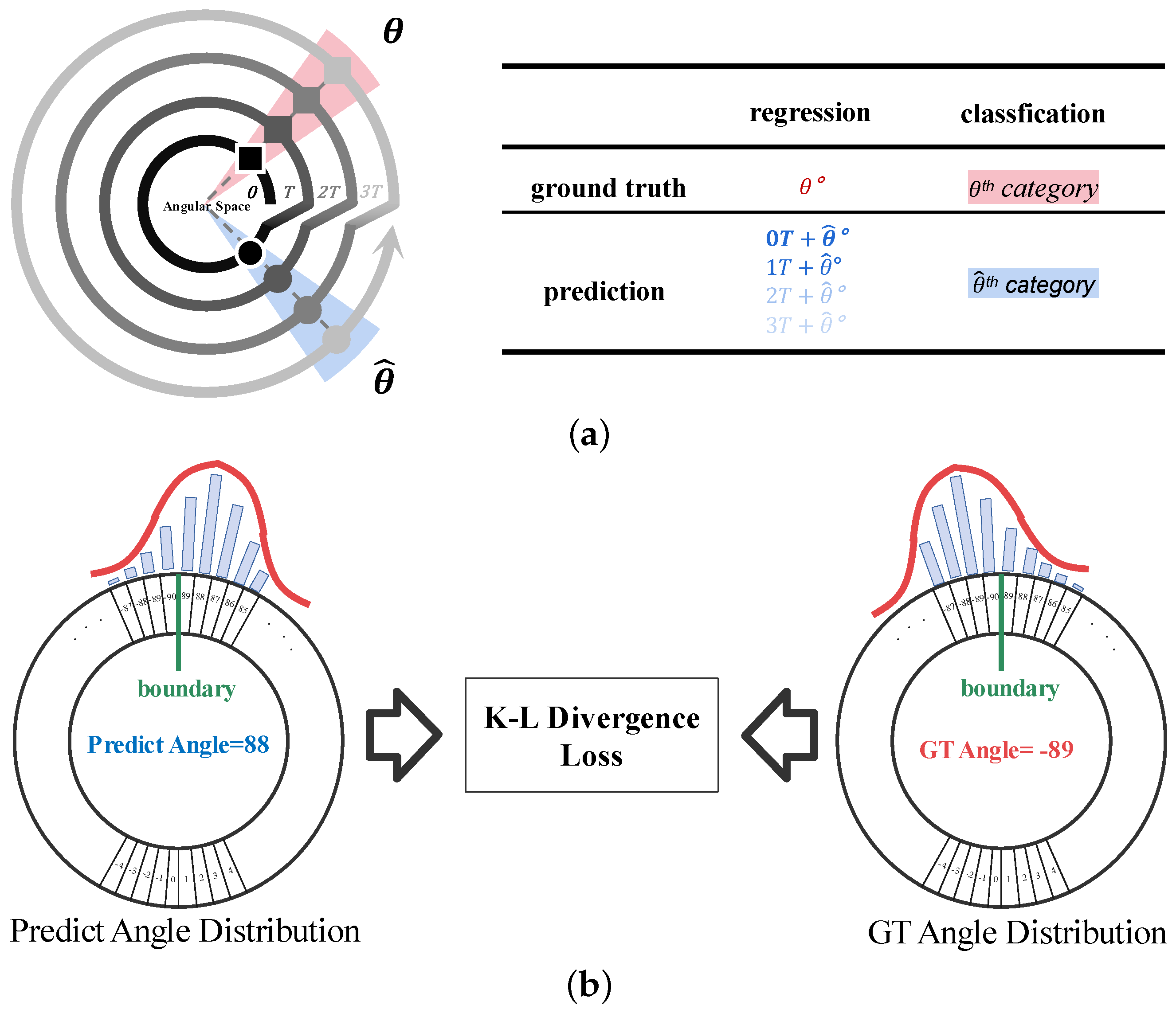
3.1. Circular Gaussian Distribution Construction
| Algorithm 1: Pseudocode of CGD in a Numpy-like style. |
| # angle: angle of bounding box |
| # sig: standard deviation of Gaussian distribution |
| def Circular_Gaussian_Distribution(angle, sig=4.0): |
| x = np.array(range(math.floor(−180/2), math.ceil(180/2), 1)) |
| d = np.exp(−(x) ∗∗ 2 / (2 ∗ sig ∗∗ 2)) |
| d_left = d[math.ceil(180/2)−angle:] |
| d_right = d[:math.ceil(180/2)−angle] |
| CGD = np.concatenate([d_left, d_right], axis=0) |
| return CGD |
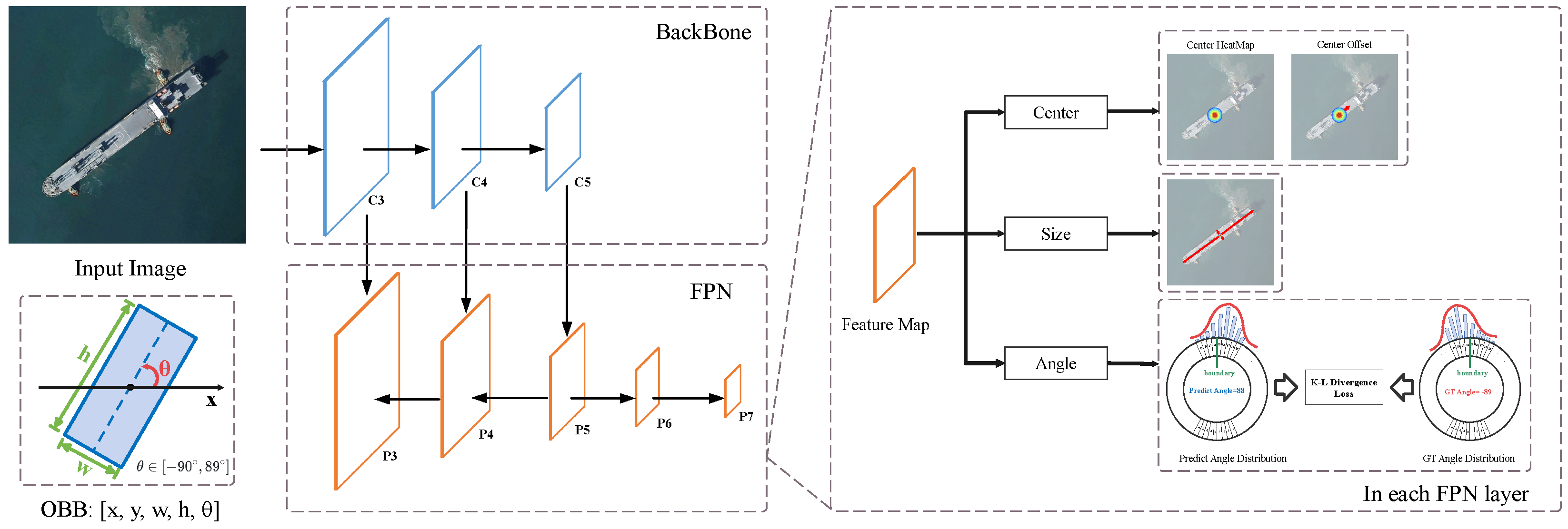
3.2. Overall Architecture
3.2.1. Backbone
3.2.2. Center Branch
3.2.3. Size Branch
3.2.4. Angle Branch
4. Experiments
4.1. Datasets and Implementation Details
4.1.1. DOTA
4.1.2. HRSC2016
4.1.3. Evaluation Metric
4.1.4. Implementation Details
4.2. Ablation Study
4.2.1. Influence of Different Hyper-Parameter Value
4.2.2. Effectiveness of CGD
4.3. Comparisons with the State-of-the-Art Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, J.; Xue, N.; Long, Y.; Xia, G.S.; Lu, Q. Learning RoI Transformer for Oriented Object Detection in Aerial Images. In Proceedings of the International IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–19 June 2019; pp. 2849–2858. [Google Scholar]
- Xu, Y.; Fu, M.; Wang, Q.; Wang, Y.; Chen, K.; Xia, G.S.; Bai, X. Gliding vertex on the horizontal bounding box for multi-oriented object detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 1452–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, H.; Zhao, Q.; Ma, Y.; Li, X.; Yuan, P.; Feng, B.; Yan, C.; Dai, F. PANDORA: A Panoramic Detection Dataset for Object with Orientation. In Proceedings of the European Conference on Computer Vision (ECCV), Tel Aviv, Israel, 23–27 October 2022; pp. 237–252. [Google Scholar]
- Liu, X.; Xu, H.; Chen, B.; Zhao, Q.; Ma, Y.; Yan, C.; Dai, F. Sph2Pob: Boosting Object Detection on Spherical Images with Planar Oriented Boxes Methods. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), Macao, China, 19–25 August 2023. [Google Scholar]
- Xu, H.; Liu, X.; Zhao, Q.; Ma, Y.; Yan, C.; Dai, F. Gaussian Label Distribution Learning for Spherical Image Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 18–22 June 2023; pp. 1033–1042. [Google Scholar]
- Jiang, Y.; Zhu, X.; Wang, X.; Yang, S.; Li, W.; Wang, H.; Fu, P.; Luo, Z. R2cnn: Rotational region cnn for orientation robust scene text detection. arXiv 2017, arXiv:1706.09579. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Xia, G.S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A large-scale dataset for object detection in aerial images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 3974–3983. [Google Scholar]
- Liu, Z.; Yuan, L.; Weng, L.; Yang, Y. A high resolution optical satellite image dataset for ship recognition and some new baselines. In Proceedings of the International Conference on Pattern Recognition Applications and Methods, Porto, Portugal, 24–26 February 2017; Volume 2, pp. 324–331. [Google Scholar]
- Xu, H.; Liu, X.; Xu, H.; Ma, Y.; Zhu, Z.; Yan, C.; Dai, F. Rethinking Boundary Discontinuity Problem for Oriented Object Detection. arXiv 2023, arXiv:2305.10061. [Google Scholar]
- Yang, X.; Yan, J.; Qi, M.; Wang, W.; Xiaopeng, Z.; Qi, T. Rethinking Rotated Object Detection with Gaussian Wasserstein Distance Loss. In Proceedings of the International Conference on Machine Learning, Virtual, 18–24 July 2021. [Google Scholar]
- Pan, X.; Ren, Y.; Sheng, K.; Dong, W.; Yuan, H.; Guo, X.; Ma, C.; Xu, C. Dynamic refinement network for oriented and densely packed object detection. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11207–11216. [Google Scholar]
- Ming, Q.; Zhou, Z.; Miao, L.; Zhang, H.; Li, L. Dynamic Anchor Learning for Arbitrary-Oriented Object Detection. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 2355–2363. [Google Scholar]
- Yang, X.; Yan, J. Arbitrary-Oriented Object Detection with Circular Smooth Label. In Proceedings of the European Conference on Computer Vision. Springer, Tel Aviv, Israel, 23–27 October 2020; pp. 677–694. [Google Scholar]
- Zhao, T.; Liu, N.; Celik, T.; Li, H.C. An Arbitrary-Oriented Object Detector Based on Variant Gaussian Label in Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as Points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Dai, F.; Chen, B.; Xu, H.; Ma, Y.; Li, X.; Feng, B.; Yan, C.; Zhao, Q. Unbiased IoU for Spherical Image Object Detection. In Proceedings of the AAAI, Virtual, 22 February–1 March 2022. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Xie, X.; Cheng, G.; Wang, J.; Yao, X.; Han, J. Oriented R-CNN for Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 3520–3529. [Google Scholar]
- Han, J.; Ding, J.; Li, J.; Xia, G.S. Align Deep Features for Oriented Object Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Zhang, G.; Lu, S.; Zhang, W. CAD-Net: A Context-Aware Detection Network for Objects in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10015–10024. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Yan, J.; Liao, W.; Yang, X.; Tang, J.; He, T. SCRDet++: Detecting Small, Cluttered and Rotated Objects via Instance-Level Feature Denoising and Rotation Loss Smoothing. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 2384–2399. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Shao, W.; Ye, H.; Wang, L.; Wang, H.; Zheng, Y.; Xue, X. Arbitrary-oriented scene text detection via rotation proposals. IEEE Trans. Multimedia 2018, 20, 3111–3122. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Xiong, B.; Li, X.; Kuang, G. Aspect-Ratio-Guided Detection for Oriented Objects in Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, J.; Li, K.; Xie, X.; Lang, C.; Yao, Y.; Han, J. Anchor-Free Oriented Proposal Generator for Object Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Yang, X.; Yang, J.; Yan, J.; Zhang, Y.; Zhang, T.; Guo, Z.; Sun, X.; Fu, K. Scrdet: Towards more robust detection for small, cluttered and rotated objects. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–19 June 2019; pp. 8232–8241. [Google Scholar]
- Qian, W.; Yang, X.; Peng, S.; Yan, J.; Guo, Y. Learning Modulated Loss for Rotated Object Detection. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 2458–2466. [Google Scholar]
- Yang, X.; Yan, J.; Feng, Z.; He, T. R3Det: Refined Single-Stage Detector with Feature Refinement for Rotating Object. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 3163–3171. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backbone | mAP07 | mAP12 | |
|---|---|---|---|
| 2 | R-50-FPN | 6.56 | 3.08 |
| 4 | R-50-FPN | 90.44 | 97.31 |
| 6 | R-50-FPN | 90.54 | 97.76 |
| 8 | R-50-FPN | 90.52 | 97.17 |
| 10 | R-50-FPN | 90.47 | 97.08 |
| Loss | Backbone | mAP07 | mAP12 | Speed (ms) |
|---|---|---|---|---|
| DR | R-50-FPN | 85.39 | 90.25 | 0.4950 |
| IR | R-50-FPN | 87.82 | 93.67 | 0.4606 |
| CSL | R-50-FPN | 89.98 | 95.13 | 0.5910 |
| CGD | R-50-FPN | 90.52 | 97.76 | 0.3912 |
| Method | Backbone | mAP07 | mAP12 |
|---|---|---|---|
| RRPN [26] | VGG16 | 79.08 | 85.64 |
| R2CNN [6] | VGG16 | 73.07 | 79.73 |
| RT [1] | R-101-FPN | 86.20 | - |
| ARG [27] | R-101-FPN | 88.08 | 93.83 |
| GV [2] | R-101-FPN | 88.20 | - |
| DRN [13] | Hourglass-104 | - | 92.70 |
| GWD [12] | R-101-FPN | 89.43 | - |
| DAL [14] | R-101-FPN | 89.77 | - |
| VGL [16] | DLA34-DCN | 89.78 | - |
| S ANet [23] | R-101-FPN | 90.17 | 95.01 |
| AOPG [28] | R-101-FPN | 90.34 | 96.22 |
| CGD (Our) | R-101-FPN | 90.61 | 98.14 |
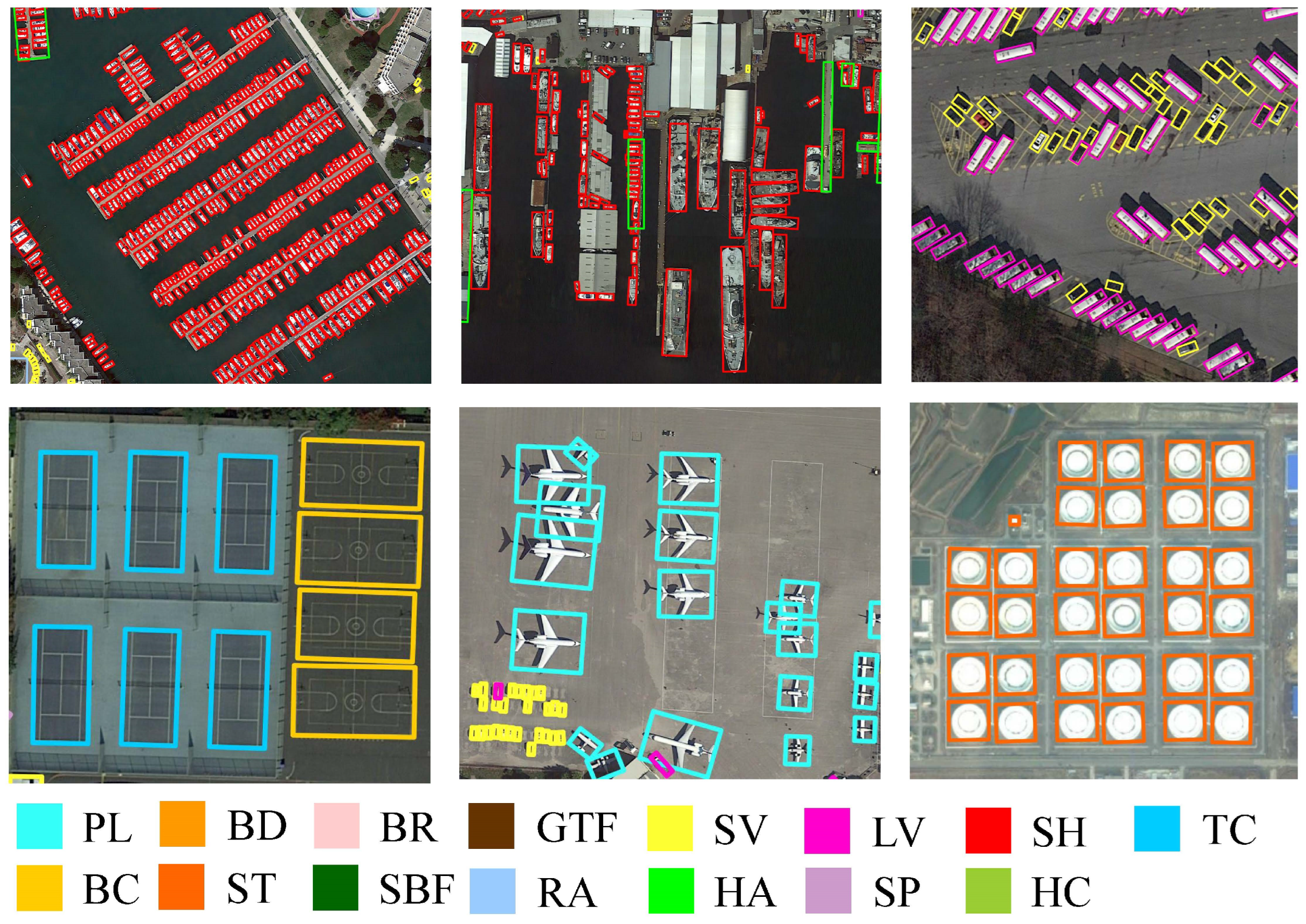
| Method | Backbone | PL | BD | BR | GTF | SV | LV | SH | TC | BC | ST | SBF | RA | HA | SP | HC | mAP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Two-stage | |||||||||||||||||
| RRPN [26] | R-101 | 80.94 | 65.75 | 35.34 | 67.44 | 59.92 | 50.91 | 55.81 | 90.67 | 66.92 | 72.39 | 55.06 | 52.23 | 55.14 | 53.35 | 48.22 | 60.01 |
| R2CNN [6] | R-101 | 80.94 | 65.67 | 35.34 | 67.44 | 59.92 | 50.91 | 55.81 | 90.67 | 66.92 | 72.39 | 55.06 | 52.23 | 55.14 | 53.35 | 48.22 | 60.67 |
| RoI Transformer [1] | R-101-FPN | 88.64 | 78.52 | 43.44 | 75.92 | 68.81 | 73.68 | 83.59 | 90.74 | 77.27 | 81.46 | 58.39 | 53.54 | 62.83 | 58.93 | 47.67 | 69.56 |
| SCRDet [29] | R-101-FPN | 89.98 | 80.65 | 52.09 | 68.36 | 68.36 | 60.32 | 72.41 | 90.85 | 87.94 | 86.86 | 65.02 | 66.68 | 66.25 | 68.24 | 65.21 | 72.61 |
| Gliding Vertex [2] | R-101-FPN | 89.64 | 85.00 | 52.26 | 77.34 | 73.01 | 73.14 | 86.82 | 90.74 | 79.02 | 86.81 | 59.55 | 70.91 | 72.94 | 70.86 | 57.32 | 75.02 |
| Faster-RCNN-O [7] | R-50-FPN | 88.44 | 73.06 | 44.86 | 59.09 | 73.25 | 71.49 | 77.11 | 90.84 | 78.94 | 83.90 | 48.59 | 62.95 | 62.18 | 64.91 | 56.18 | 69.05 |
| AOPG [28] | R-101-FPN | 89.14 | 82.74 | 51.87 | 69.28 | 77.65 | 82.42 | 88.08 | 90.89 | 86.26 | 85.13 | 60.60 | 66.30 | 74.05 | 67.76 | 58.77 | 75.39 |
| CSL [15] | R-152-FPN | 90.25 | 85.53 | 54.64 | 75.31 | 70.44 | 73.51 | 77.62 | 90.84 | 86.15 | 86.69 | 69.60 | 68.04 | 73.83 | 71.10 | 68.93 | 76.17 |
| One-stage | |||||||||||||||||
| RetinaNet-O [8] | R-50-FPN | 88.67 | 77.62 | 41.81 | 58.17 | 74.58 | 71.64 | 79.11 | 90.29 | 82.18 | 74.32 | 54.75 | 60.60 | 62.57 | 69.67 | 60.64 | 68.43 |
| DRN [13] | Hourglass-104 | 88.91 | 80.22 | 43.52 | 63.35 | 73.48 | 70.69 | 84.94 | 90.14 | 83.85 | 84.11 | 50.12 | 58.41 | 67.62 | 68.60 | 52.50 | 70.70 |
| DAL [14] | R-50-FPN | 88.68 | 76.55 | 45.08 | 66.80 | 67.00 | 76.76 | 79.74 | 90.84 | 79.54 | 78.45 | 57.71 | 62.27 | 69.05 | 73.14 | 60.11 | 71.44 |
| RSDet [30] | R-101-FPN | 89.80 | 82.90 | 48.60 | 65.20 | 69.50 | 70.10 | 70.20 | 90.50 | 85.60 | 83.40 | 62.50 | 63.90 | 65.60 | 67.20 | 68.00 | 72.20 |
| R3Det [31] | R-101-FPN | 88.76 | 83.09 | 50.91 | 67.27 | 76.23 | 80.39 | 86.72 | 90.78 | 84.68 | 83.24 | 61.98 | 61.35 | 66.91 | 70.63 | 53.94 | 73.79 |
| S ANet [23] | R-50-FPN | 89.11 | 82.84 | 48.37 | 71.11 | 78.11 | 78.39 | 87.25 | 90.83 | 84.90 | 85.64 | 60.36 | 62.60 | 65.26 | 69.13 | 57.94 | 74.12 |
| GWD [12] | R-152-FPN | 86.96 | 83.88 | 54.36 | 77.53 | 74.41 | 68.48 | 80.34 | 86.62 | 83.41 | 85.55 | 73.47 | 67.77 | 72.57 | 75.76 | 73.40 | 76.30 |
| Ours | |||||||||||||||||
| CGD | R-50-FPN | 89.80 | 81.66 | 52.00 | 73.05 | 77.55 | 81.83 | 88.20 | 90.86 | 86.23 | 86.10 | 60.08 | 67.28 | 76.32 | 75.07 | 60.08 | 76.41 |
| CGD | R-101-FPN | 90.12 | 84.33 | 55.46 | 74.14 | 75.40 | 81.26 | 88.92 | 90.81 | 83.27 | 87.12 | 63.71 | 66.20 | 77.13 | 80.50 | 61.79 | 77.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Liu, X.; Ma, Y.; Zhu, Z.; Wang, S.; Yan, C.; Dai, F. Rotated Object Detection with Circular Gaussian Distribution. Electronics 2023, 12, 3265. https://doi.org/10.3390/electronics12153265
Xu H, Liu X, Ma Y, Zhu Z, Wang S, Yan C, Dai F. Rotated Object Detection with Circular Gaussian Distribution. Electronics. 2023; 12(15):3265. https://doi.org/10.3390/electronics12153265
Chicago/Turabian StyleXu, Hang, Xinyuan Liu, Yike Ma, Zunjie Zhu, Shuai Wang, Chenggang Yan, and Feng Dai. 2023. "Rotated Object Detection with Circular Gaussian Distribution" Electronics 12, no. 15: 3265. https://doi.org/10.3390/electronics12153265