
Optimized Active Collision Avoidance Algorithm of Intelligent Vehicles



Abstract
:1. Introduction
2. Anti-Collision T-Type Active Emergency Steering Control Strategies
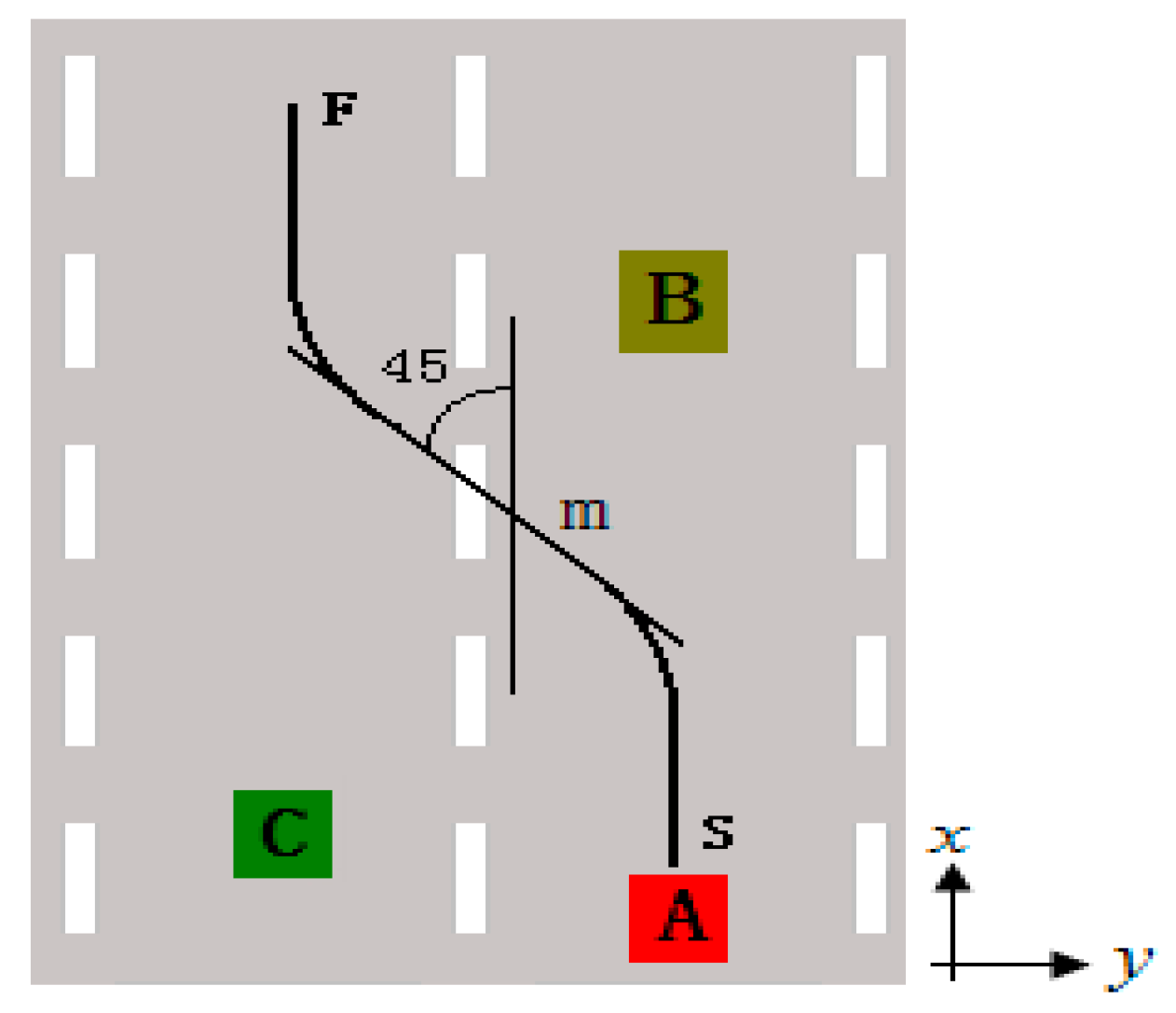
2.1. Single T-Type Emergency Steering for Preventing Side Collision at Crossroads
2.2. Anti-Collision: Double-T Emergency Steering Strategy
3. Simplified Single Traction Bicycle Model
4. Optimization Control Problem for Anti-Collision Active Emergency Steering
- s.t.
- Vehicle model constraints: Equation (1)
- State constraints: Equation (8)
- Control vector constraints: Equation (7)
- Boundary value constraints:
5. Radau Pseudospectral Method
5.1. Solving Steps Based on the Radau Pseudospectral Method
5.2. GPOPS Software Solution
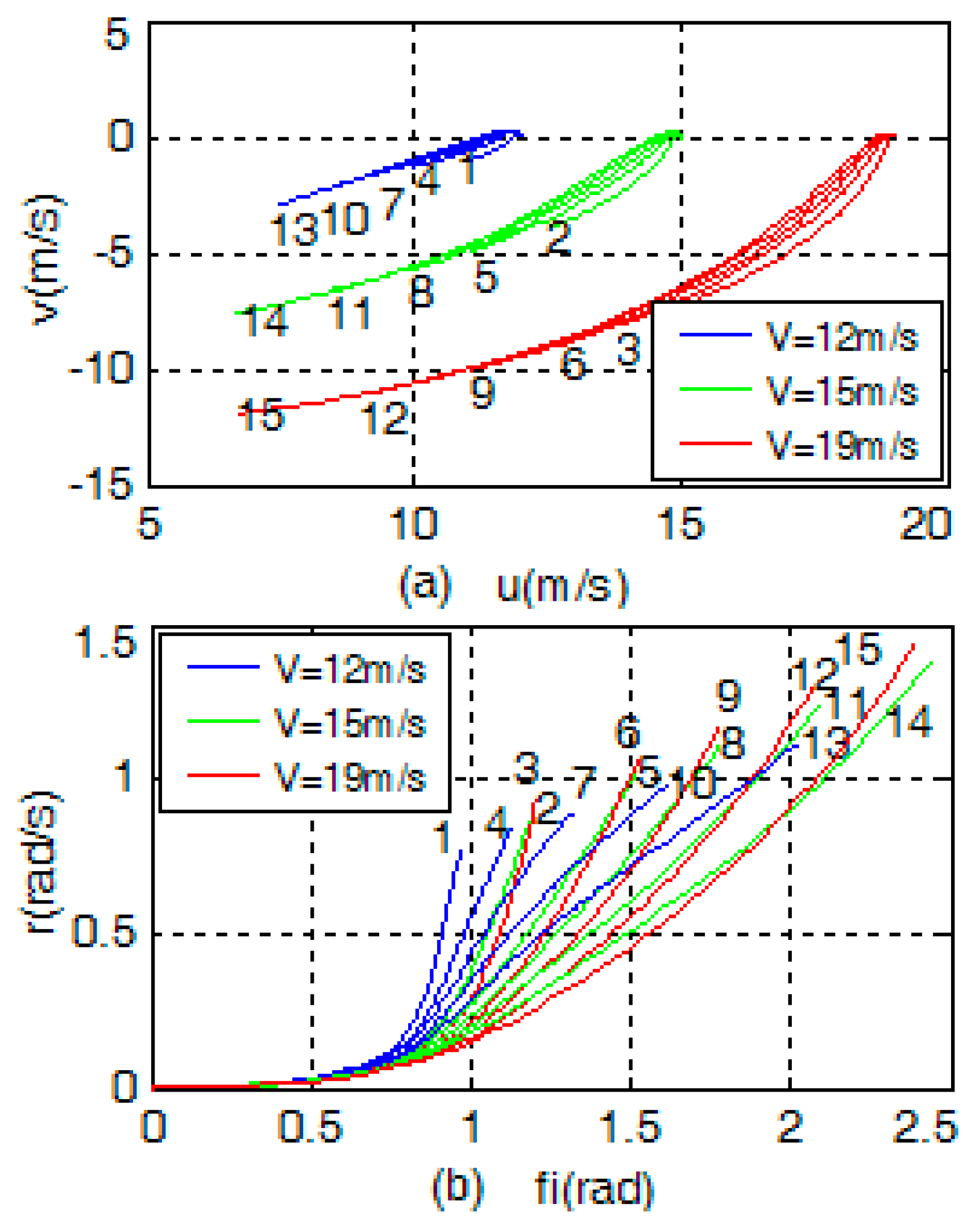
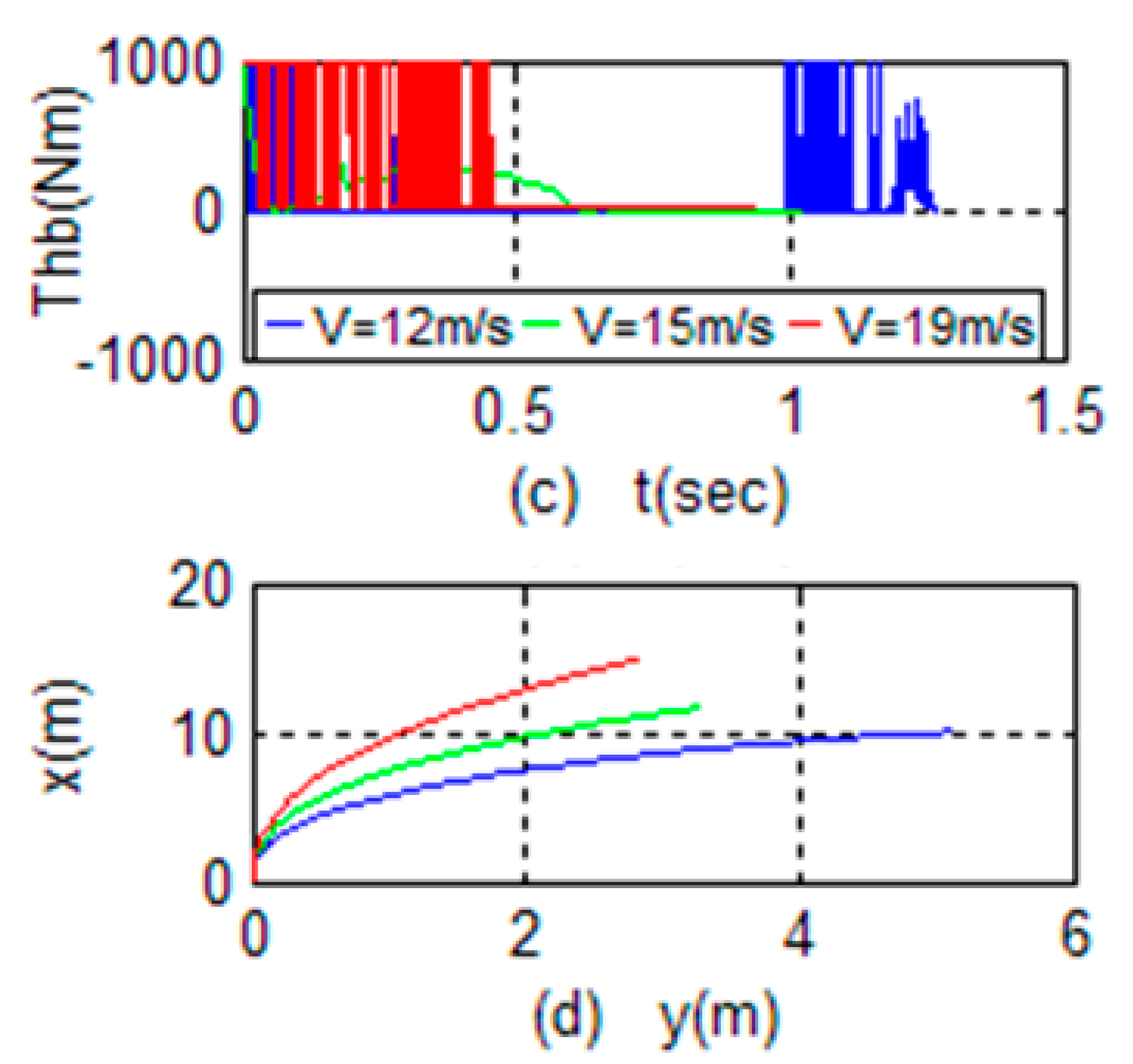
6. Numerical Simulation Results
6.1. Phase Plan of Each State
6.2. Crossroad Anti-Side-Collision T-Type Emergency Steering
6.3. Anti-Collision Double-T-Type Emergency Steering
6.4. Analysis of Anti-Collision-T-Type Steering Control Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anderson, J.; Kalra, N.; Stanley, K.; Sorensen, P.; Samaras, C.; Oluwatola, O. Autonomous Vehicle Technology: A Guide for Policymakers; RAND Corporation: Santa Monica, CA, USA, 2016; ISBN 978-0-8330-8398-2. [Google Scholar]
- Gandhi, T.; Trivedi, M.M. Vehicle Surround Capture: Survey of Techniques and a Novel Omni-Video-Based Approach for Dynamic Panoramic Surround Maps. IEEE Trans. Intell. Transp. Syst. 2006, 7, 293–308. [Google Scholar] [CrossRef]
- Sandu, C. Vehicle Dynamics: Theory and Applications. J. Guid. Control. Dyn. 2010, 33, 287–288. [Google Scholar] [CrossRef]
- Anderson, R.; Hutchinson, T.; Linke, B.; Ponte, G. Analysis of Crash Data to Estimate the Benefits of Emerging Vehicle Technology; Centre for Automotive Safety Research, The University of Adelaide: Singapore, 2010. [Google Scholar]
- Saha, S.; Amrr, S.M. Design of Slip-Based Traction Control System for EV and Validation Using Co-Simulation between Adams and Matlab/Simulink. Simulation 2020, 96, 537–549. [Google Scholar] [CrossRef]
- Yih, P.; Ryu, J.; Gerdes, J.C. Modification of Vehicle Handling Characteristics via Steer-by-Wire. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 3, pp. 2578–2583. [Google Scholar]
- Fujita, Y.; Tsuchiya, Y.; Suzumura, M.; Kojo, T. Development of Active Front Steering Control System; SAE International: Warrendale, PA, USA, 2005. [Google Scholar]
- Baek, M.; Jeong, D.; Choi, D.; Lee, S. Vehicle Trajectory Prediction and Collision Warning via Fusion of Multisensors and Wireless Vehicular Communications. Sensors 2020, 20, 288. [Google Scholar] [CrossRef] [PubMed]
- Koopman, P.; Wagner, M. Autonomous Vehicle Safety: An Interdisciplinary Challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, S.; Ren, H.; Gao, Z.; Liu, Z. Path Tracking and Handling Stability Control Strategy With Collision Avoidance for the Autonomous Vehicle Under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 69, 14602–14617. [Google Scholar] [CrossRef]
- Li, K.; Chen, T.; Luo, Y.; Wang, J. Intelligent Environment-Friendly Vehicles: Concept and Case Studies. IEEE Trans. Intell. Transp. Syst. 2012, 13, 318–328. [Google Scholar] [CrossRef]
- Guo, J.; Chu, L.; Liu, H.; Shang, M.; Fang, Y. Integrated Control of Active Front Steering and Electronic Stability Program. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; pp. 449–453. [Google Scholar]
- Zhao, Z.; Zhou, L.; Zhu, Q.; Luo, Y.; Li, K. A Review of Essential Technologies for Collision Avoidance Assistance Systems. Adv. Mech. Eng. 2017, 9, 168781401772524. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Su, Z. Cooperative Path Planning with Applications to Target Tracking and Obstacle Avoidance for Multi-UAVs. Aerosp. Sci. Technol. 2016, 54, 10–22. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Xu, H. Vehicle Detection Based on Multifeature Extraction and Recognition Adopting RBF Neural Network on ADAS System. Complexity 2020, 2020, 8842297. [Google Scholar] [CrossRef]
- Rammohan, A.; Chavhan, S.; Chidambaram, R.K.; Manisaran, N.; Kumar, K.P. Automotive Collision Avoidance System: A Review. In Virtual and Augmented Reality for Automobile Industry: Innovation Vision and Applications; Springer International Publishing: Cham, Switzerland, 2022; pp. 1–19. [Google Scholar]
- Khodayari, A.; Ghaffari, A.; Ameli, S.; Flahatgar, J. A Historical Review on Lateral and Longitudinal Control of Autonomous Vehicle Motions. In Proceedings of the 2010 International Conference on Mechanical and Electrical Technology, Singapore, 10–12 September 2010; pp. 421–429. [Google Scholar]
- Dahl, J.; De Campos, G.R.; Olsson, C.; Fredriksson, J. Collision Avoidance: A Literature Review on Threat-Assessment Techniques. IEEE Trans. Intell. Veh. 2019, 4, 101–113. [Google Scholar] [CrossRef]
- Mg, P. A Literature Review on Collision Avoidance in Vehicles Using CAN. Int. J. Res. Appl. Sci. Eng. Technol. 2022, 10, 4559–4561. [Google Scholar] [CrossRef]
- McCall, J.C.; Trivedi, M.M. Video-Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation. IEEE Trans. Intell. Transp. Syst. 2006, 7, 20–37. [Google Scholar] [CrossRef]
- Shladover, S.E.; Nowakowski, C.; Lu, X.-Y.; Ferlis, R. Cooperative Adaptive Cruise Control: Definitions and Operating Concepts. Transp. Res. Rec. J. Transp. Res. Board 2015, 2489, 145–152. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, W.; Koo, B.; Yi, K. Unified Chassis Control for Rollover Prevention and Lateral Stability. IEEE Trans. Veh. Technol. 2009, 58, 596–609. [Google Scholar] [CrossRef]
- Wan, W.; Feng, J.; Bao, S.; Li, X. Vehicle State Estimation Using Interacting Multiple Model Based on Square Root Cubature Kalman Filter. Appl. Sci. 2021, 11, 10772. [Google Scholar] [CrossRef]
- Lee, J.; Yi, K.; Yoo, H.; Chong, H.; Ko, B. Risk Management Algorithm for Rear-Side Collision Avoidance Using a Combined Steering Torque Overlay and Differential Braking. Veh. Syst. Dyn. 2015, 53, 812–832. [Google Scholar] [CrossRef]
- Elsayed, H.; Abdullah, B.A.; Aly, G. Fuzzy Logic Based Collision Avoidance System for Autonomous Navigation Vehicle. In Proceedings of the 2018 13th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 18–19 December 2018; pp. 469–474. [Google Scholar]
- Gehrig, S.K.; Stein, F.J. Collision Avoidance for Vehicle-Following Systems. IEEE Trans. Intell. Transp. Syst. 2007, 8, 233–244. [Google Scholar] [CrossRef]
- Latrech, C.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Integrated Longitudinal and Lateral Networked Control System Design for Vehicle Platooning. Sensors 2018, 18, 3085. [Google Scholar] [CrossRef]
- Smith, D.; Benton, R.; Starkey, J. Nonlinear-Gain-Optimised Controller Development and Evaluation for Automated Emergency Vehicle Steering. Int. J. Veh. Des. 2000, 24, 79. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef]
- Ma, X.; Wong, P.K.; Zhao, J.; Xie, Z. Cornering Stability Control for Vehicles with Active Front Steering System Using T-S Fuzzy Based Sliding Mode Control Strategy. Mech. Syst. Signal Process. 2019, 125, 347–364. [Google Scholar] [CrossRef]
- Qin, J.; He, R.; Liu, Y.; Deng, W.; Zhang, S. Research on Lateral Active Collision Avoidance Algorithms for Intelligent Vehicles. In Proceedings of China SAE Congress 2019: Selected Papers; China Society of Automotive Engineers, Ed.; Lecture Notes in Electrical Engineering; Springer Singapore: Singapore, 2021; Volume 646, pp. 527–541. ISBN 9789811579448. [Google Scholar]
- Dib, W.; Chasse, A.; Moulin, P.; Sciarretta, A.; Corde, G. Optimal Energy Management for an Electric Vehicle in Eco-Driving Applications. Control. Eng. Pract. 2014, 29, 299–307. [Google Scholar] [CrossRef]
- Wang, T.; Cassandras, C.G.; Pourazarm, S. Optimal Motion Control for Energy-Aware Electric Vehicles. Control. Eng. Pract. 2015, 38, 37–45. [Google Scholar] [CrossRef]
- Huntington, G.; Benson, D.; Rao, A. A Comparison of Accuracy and Computational Efficiency of Three Pseudospectral Methods. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; American Institute of Aeronautics and Astronautics: Hilton Head, SC, USA, 2007. [Google Scholar]
- Ozatay, E.; Onori, S.; Wollaeger, J.; Ozguner, U.; Rizzoni, G.; Filev, D.; Michelini, J.; Di Cairano, S. Cloud-Based Velocity Profile Optimization for Everyday Driving: A Dynamic-Programming-Based Solution. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2491–2505. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, Y.; Zhang, X.; Lin, F. Shared Control for Lane Keeping Assistance System Based on Multiple-Phase Handling Inverse Dynamics. Control. Eng. Pract. 2019, 93, 104182. [Google Scholar] [CrossRef]
- Wei, S.; Zou, Y.; Sun, F.; Christopher, O. A Pseudospectral Method for Solving Optimal Control Problem of a Hybrid Tracked Vehicle. Appl. Energy 2017, 194, 588–595. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Unit | Parameter Name | Value | Unit |
|---|---|---|---|---|---|
| 1245 | Kg | 7 | - | ||
| 1200 | Kg.m2 | 1.4 | - | ||
| 1.8 | Kg.m2 | 45 | deg | ||
| 0.8 | - | −45 | deg | ||
| 1.1 | m | 3000 | Nm | ||
| 1.3 | m | 1000 | Nm | ||
| 0.58 | m | 0.4 | - | ||
| 0.29 | m | 9.81 | m/s2 |
| T-Type Emergency Steering | Double T-Type Emergency Steering | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| V0 | Vf | Ψ0 | Ψf | tf | V0 | Vf | Ψ0 | Ψf | tf |
| 12 | 7 | 0 | 90 | 0.6 | 12 | 8 | 0 | 0 | 0.9 |
| 15 | 6.5 | 0 | 90 | 1.4 | 15 | 11 | 0 | 0 | 1.3 |
| 19 | 6.6 | 0 | 90 | 0.9 | 19 | 15 | 0 | 0 | 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Lu, X.; Xu, J. Optimized Active Collision Avoidance Algorithm of Intelligent Vehicles. Electronics 2023, 12, 2451. https://doi.org/10.3390/electronics12112451
Xu Q, Lu X, Xu J. Optimized Active Collision Avoidance Algorithm of Intelligent Vehicles. Electronics. 2023; 12(11):2451. https://doi.org/10.3390/electronics12112451
Chicago/Turabian StyleXu, Qingwei, Xiangyang Lu, and Juncai Xu. 2023. "Optimized Active Collision Avoidance Algorithm of Intelligent Vehicles" Electronics 12, no. 11: 2451. https://doi.org/10.3390/electronics12112451