
Clothoid-Based Path Planning for a Formation of Fixed-Wing UAVs




Abstract
:1. Introduction
2. Single Aircraft Clothoid-Based Path Planning
Flyable Path between Two Directions
- STEP 1. Firstly, compute the angles and between an arbitrary axis and and , respectively.
- STEP 2. Assuming , (the maximum curvature), and (the maximum sharpness), it is possible to compute as the length of a virtual curve with the maximum sharpness and maximum curvature. It is worth noting that it is called virtual because the heading change constraint has not yet been considered.
- STEP 3. The area of the trapezium with major base , minor base l as the length of the circular arc, and height must be equal to . The minor base can be computed as:If , the path includes a circular arc with curvature . If , then the path includes only two clothoids, and the maximum curvature is reached in the middle point. If , the path includes only two clothoids that do not reach the maximum curvature.
- STEP 4. Starting from the intersection point Q, if , a half-circle arc can be computed using (1) and (2), with , and ; if (), the clothoid curve can be computed using (1) and (2), with and (). These segments represent the second half of the overall curve. The first part can be computed by mirroring the results with respect to the median line between the considered directions.
- STEP 5. The curve must be moved in order to be tangent to both the assigned directions.
3. Single Aircraft Graph Construction
| Algorithm 1 Pseudo-code for graph generation |
 |
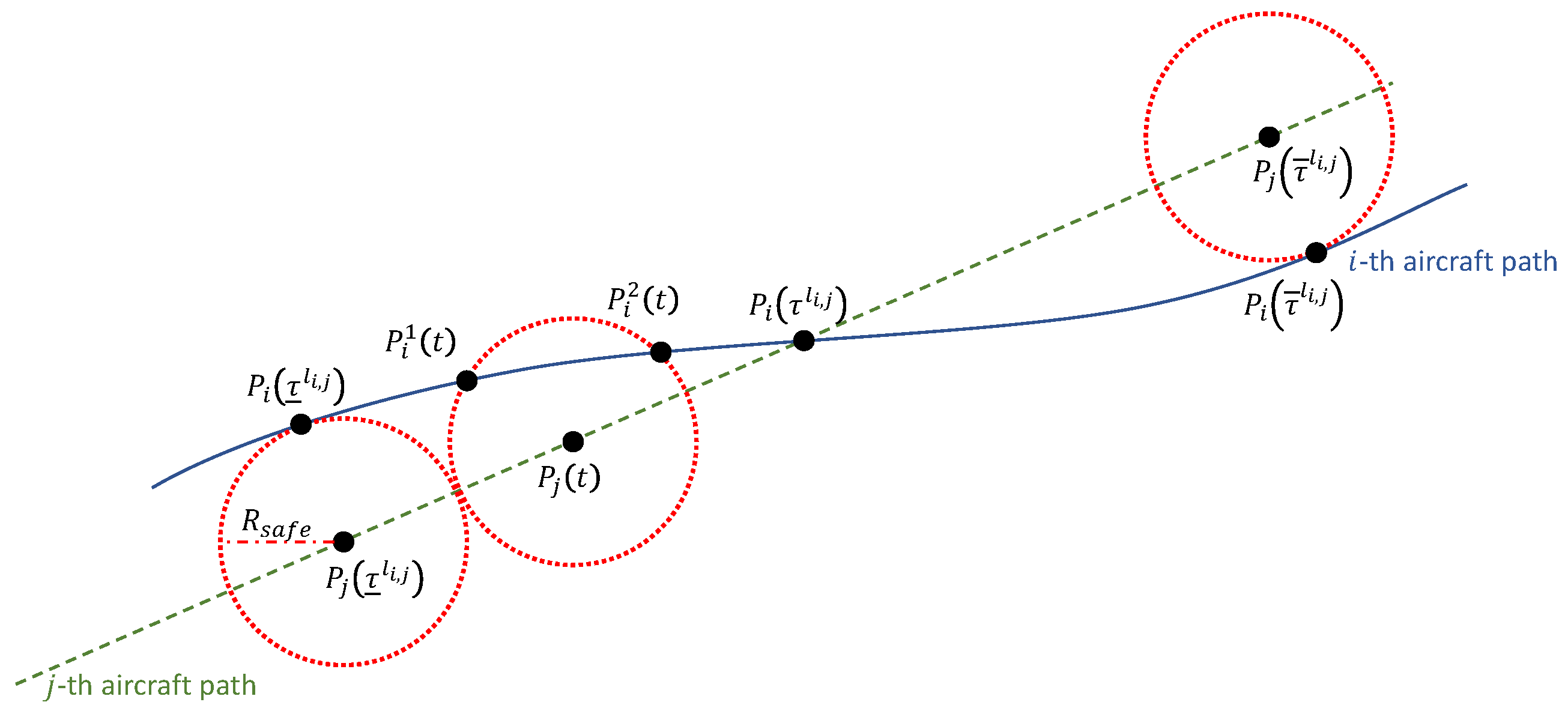
4. Multivehicle Path Planning and Collision Avoidance
5. Results
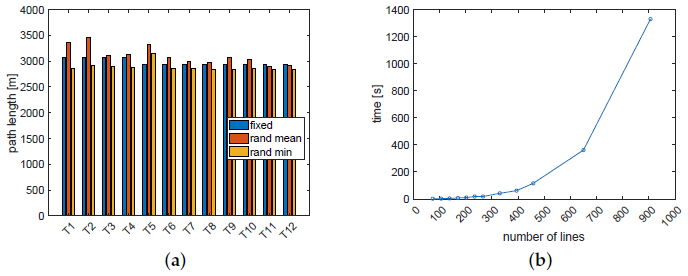
5.1. Test Case #1: Sensitivity Analysis in Unconstrained Environment
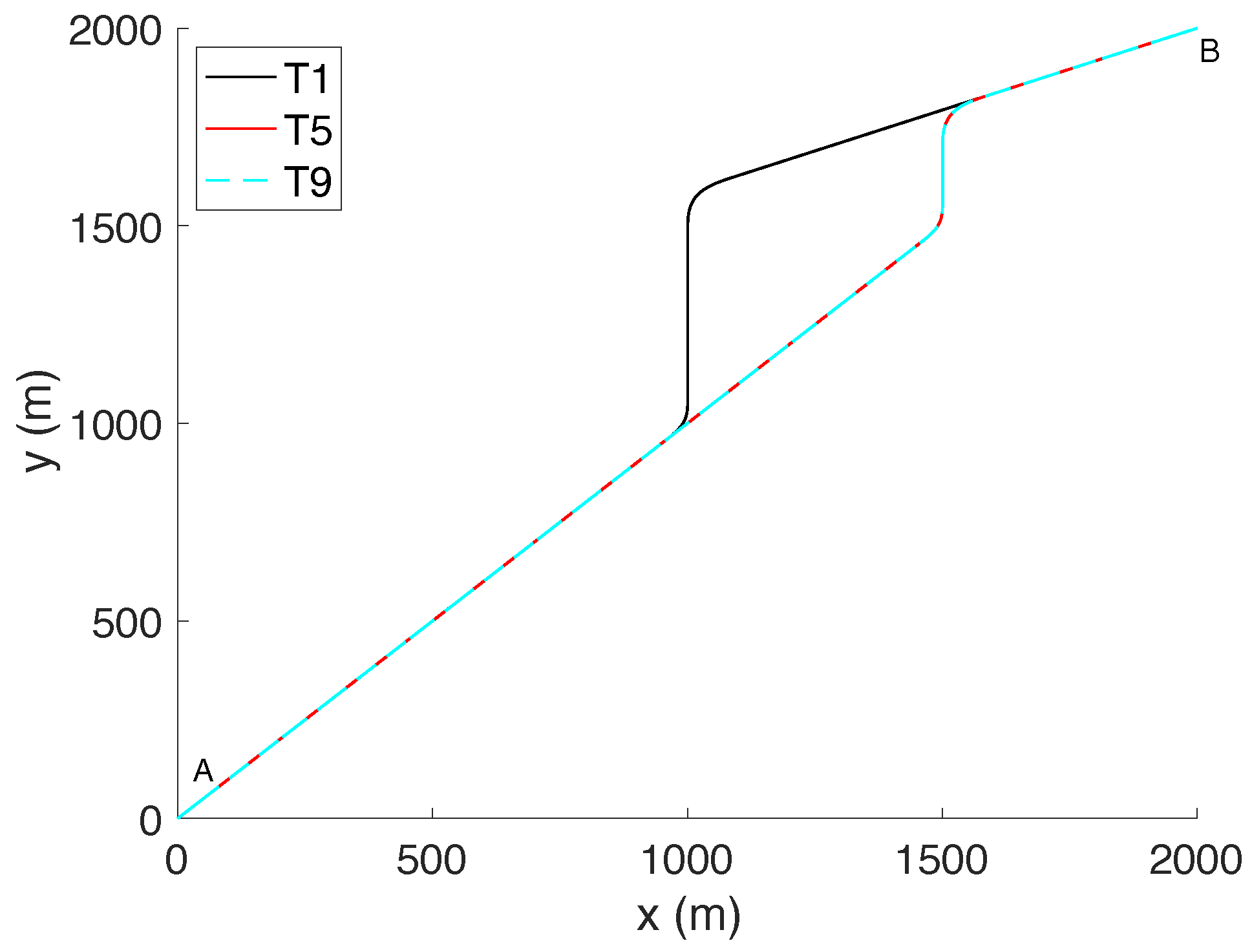
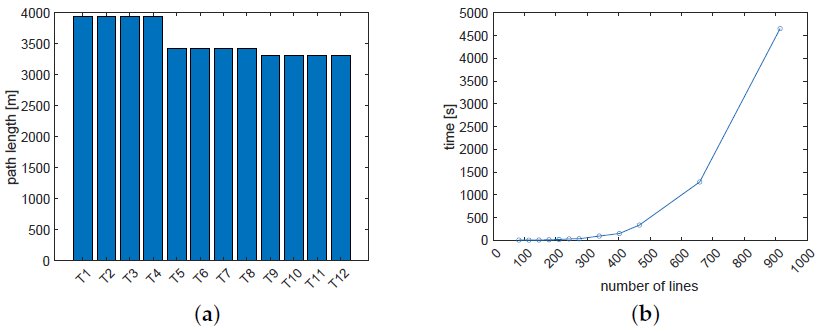
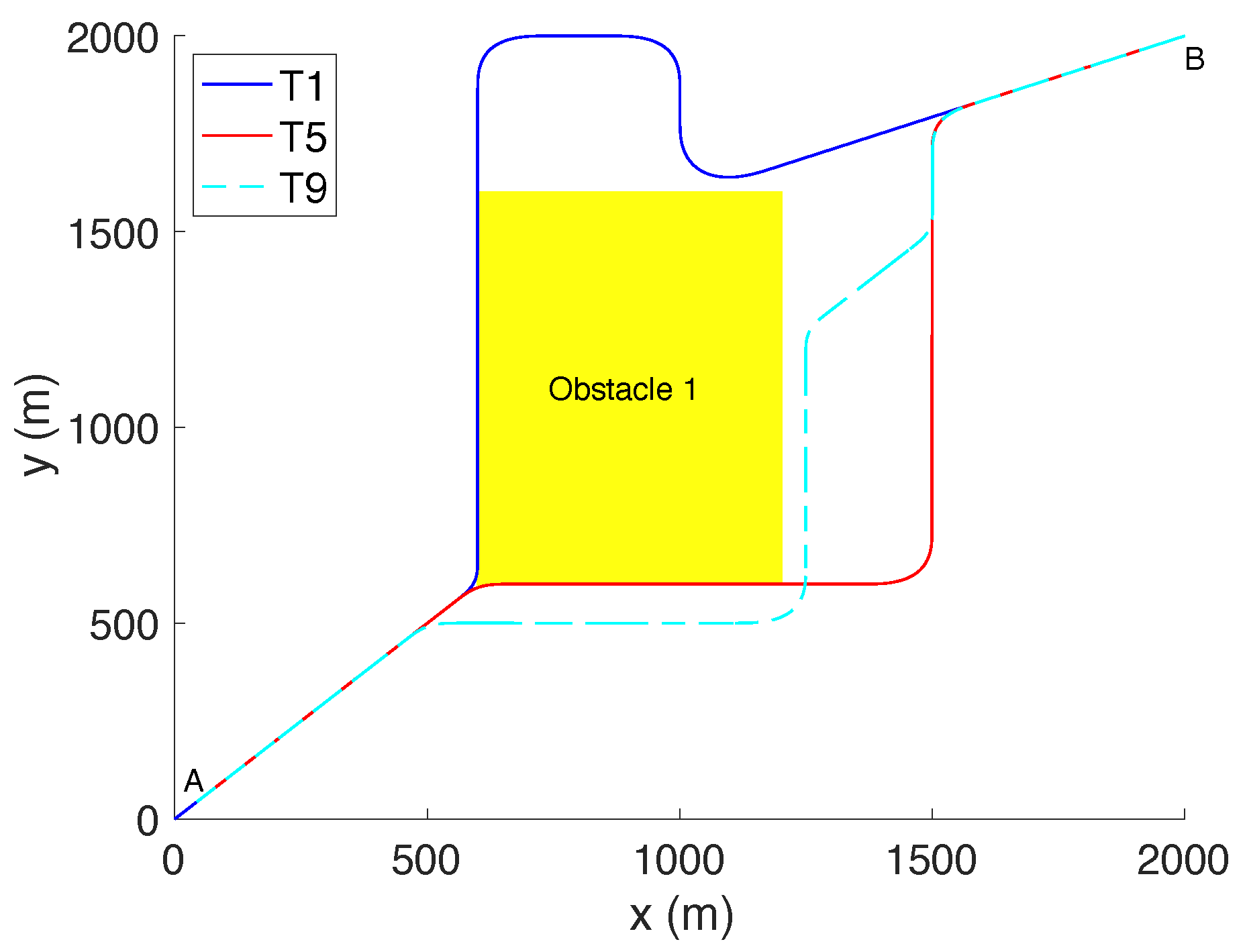
5.2. Test Case #2: Sensitivity Analysis in Constrained Environment
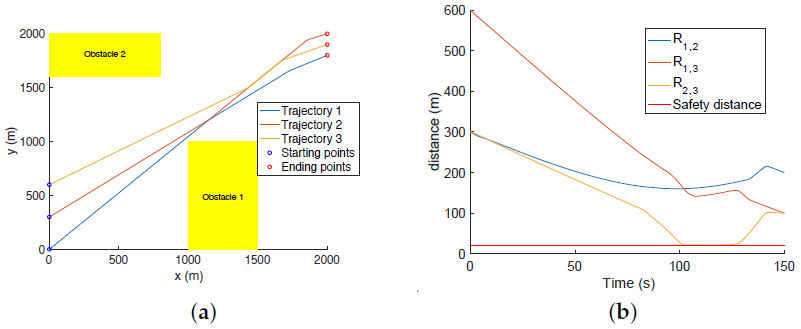
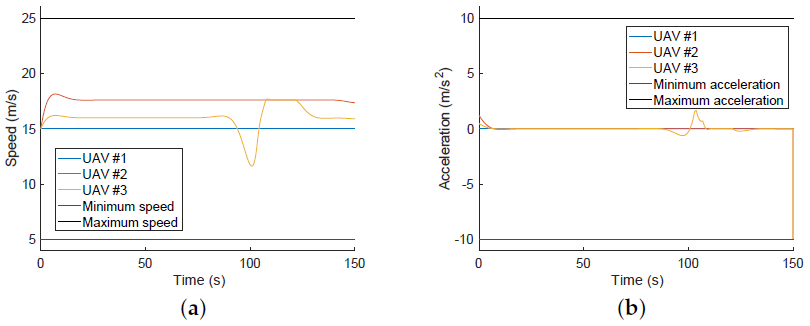
5.3. Test Case #3: Trajectory Planning for a Fleet of 3 UAVs
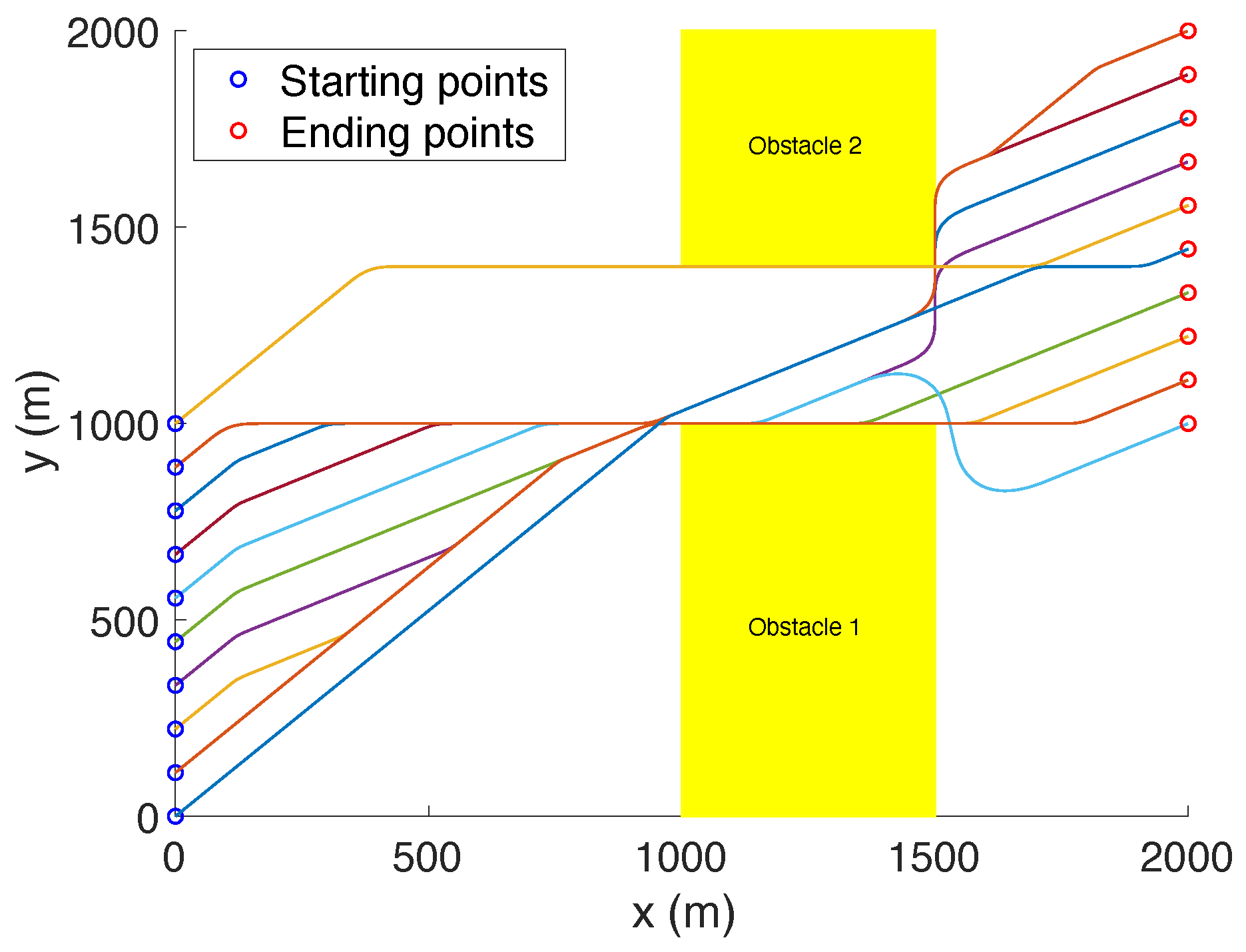
5.4. Test Case #4: Trajectory Planning for a Fleet of 10 UAVs
5.5. Test Case #5: Trajectory Planning for a Fleet of 13 UAVs
6. Limitations and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Federal Aviation Administration. FAA Aerospace Forecast. Fiscal Years 2022–2042; Federal Aviation Administration: Washington, DC, USA, 2022.
- Ramesh, P.; Jeyan, J.M.L. Comparative analysis of the impact of operating parameters on military and civil applications of mini unmanned aerial vehicle (UAV). AIP Conf. Proc. 2020, 2311, 030034. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A consolidated review of path planning and optimization techniques: Technical perspectives and future directions. Electronics 2021, 10, 2250. [Google Scholar] [CrossRef]
- Zhang, H.; Xin, B.; Dou, L.h.; Chen, J.; Hirota, K. A review of cooperative path planning of an unmanned aerial vehicle group. Front. Inf. Technol. Electron. Eng. 2020, 21, 1671–1694. [Google Scholar] [CrossRef]
- Zhang, J.; Jiahao, X. Cooperative task assignment of multi-UAV system. Chin. J. Aeronaut. 2020, 33, 2825–2827. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W.; Goodrich, M.A.; Anderson, E.P. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- Qie, H.; Shi, D.; Shen, T.; Xu, X.; Li, Y.; Wang, L. Joint optimization of multi-UAV target assignment and path planning based on multi-agent reinforcement learning. IEEE Access 2019, 7, 146264–146272. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Notaro, I. Bi-level flight path planning of UAV formations with collision avoidance. J. Intell. Robot. Syst. 2019, 93, 193–211. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65. [Google Scholar] [CrossRef]
- Souissi, O.; Benatitallah, R.; Duvivier, D.; Artiba, A.; Belanger, N.; Feyzeau, P. Path planning: A 2013 survey. In Proceedings of the 2013 International Conference on Industrial Engineering and Systems Management (IESM), Rabat, Morocco, 28–30 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar]
- Radmanesh, M.; Kumar, M.; Guentert, P.H.; Sarim, M. Overview of path-planning and obstacle avoidance algorithms for UAVs: A comparative study. Unmanned Syst. 2018, 6, 95–118. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Dasgupta, B.; Gupta, A.; Singla, E. A variational approach to path planning for hyper-redundant manipulators. Robot. Auton. Syst. 2009, 57, 194–201. [Google Scholar] [CrossRef]
- Shukla, A.; Singla, E.; Wahi, P.; Dasgupta, B. A direct variational method for planning monotonically optimal paths for redundant manipulators in constrained workspaces. Robot. Auton. Syst. 2013, 61, 209–220. [Google Scholar] [CrossRef]
- Harada, M.; Nagata, H.; Simond, J.; Bollino, K. Optimal trajectory generation and tracking control of a single coaxial rotor UAV. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4531. [Google Scholar]
- Xu, N.; Kang, W.; Cai, G.; Chen, B.M. Minimum-time trajectory planning for helicopter UAVs using computational dynamic optimization. In Proceedings of the Systems, Man, and Cybernetics (SMC), 2012 IEEE International Conference on, Seoul, Republic of Korea, 14–17 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 2732–2737. [Google Scholar]
- D’Amato, E.; Mattei, M.; Notaro, I. Distributed reactive model predictive control for collision avoidance of unmanned aerial vehicles in civil airspace. J. Intell. Robot. Syst. 2020, 97, 185–203. [Google Scholar] [CrossRef]
- Scherer, S.; Singh, S.; Chamberlain, L.; Elgersma, M. Flying fast and low among obstacles: Methodology and experiments. Int. J. Robot. Res. 2008, 27, 549–574. [Google Scholar] [CrossRef]
- Schøler, F.; la Cour-Harbo, A.; Bisgaard, M. Generating approximative minimum length paths in 3D for UAVs. In Proceedings of the Intelligent Vehicles Symposium (IV), 2012 IEEE, Madrid, Spain, 3–7 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 229–233. [Google Scholar]
- Maini, P.; Sujit, P.B. Path planning for a UAV with kinematic constraints in the presence of polygonal obstacles. In Proceedings of the Unmanned Aircraft Systems (ICUAS), 2016 International Conference on, Arlington, VA, USA, 7–10 June 2016; pp. 62–67. [Google Scholar]
- Bortoff, S.A. Path planning for UAVs. Am. Control Conf. 2000, 1, 364–368. [Google Scholar]
- Pehlivanoglu, Y.V. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV. Aerosp. Sci. Technol. 2012, 16, 47–55. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Path planning using 3D dubins curve for unmanned aerial vehicles. In Proceedings of the Unmanned Aircraft Systems (ICUAS), 2014 International Conference on, Orlando, FL, USA, 27–30 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 296–304. [Google Scholar]
- Véras, L.G.; Medeiros, F.L.; Guimarães, L.N. Rapidly exploring Random Tree* with a sampling method based on Sukharev grids and convex vertices of safety hulls of obstacles. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419825941. [Google Scholar] [CrossRef]
- Liu, Y.H.; Arimoto, S. Proposal of tangent graph and extended tangent graph for path planning of mobile robots. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; IEEE: Piscataway, NJ, USA, 1991; pp. 312–317. [Google Scholar]
- Cover, H.; Choudhury, S.; Scherer, S.; Singh, S. Sparse tangential network (SPARTAN): Motion planning for micro aerial vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2820–2825. [Google Scholar]
- Babel, L. Curvature-constrained traveling salesman tours for aerial surveillance in scenarios with obstacles. Eur. J. Oper. Res. 2017, 262, 335–346. [Google Scholar] [CrossRef]
- Musliman, I.A.; Rahman, A.A.; Coors, V. Implementing 3D network analysis in 3D GIS. Int. Arch. Isprs 2008, 37, 913–918. [Google Scholar]
- De Filippis, L.; Guglieri, G.; Quagliotti, F. Path planning strategies for UAVS in 3D environments. J. Intell. Robot. Syst. 2012, 65, 247–264. [Google Scholar] [CrossRef]
- Chang, B.R.; Tsai, H.F.; Lyu, J.L. Drone-Aided Path Planning for Unmanned Ground Vehicle Rapid Traversing Obstacle Area. Electronics 2022, 11, 1228. [Google Scholar] [CrossRef]
- Carsten, J.; Ferguson, D.; Stentz, A. 3D field D: Improved path planning and replanning in three dimensions. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 3381–3386. [Google Scholar]
- Liu, P.; Yu, H.; Cang, S. Geometric analysis-based trajectory planning and control for underactuated capsule systems with viscoelastic property. Trans. Inst. Meas. Control 2017, 40, 0142331217708833. [Google Scholar] [CrossRef]
- Duan, H.; Zhao, J.; Deng, Y.; Shi, Y.; Ding, X. Dynamic Discrete Pigeon-Inspired Optimization for Multi-UAV Cooperative Search-Attack Mission Planning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 706–720. [Google Scholar] [CrossRef]
- Eun, Y.; Bang, H. Cooperative control of multiple unmanned aerial vehicles using the potential field theory. J. Aircr. 2006, 43, 1805–1814. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, J. The three-dimension path planning of UAV based on improved artificial potential field in dynamic environment. In Proceedings of the Intelligent Human-Machine Systems and Cybernetics (IHMSC), 2013 5th International Conference on, Hangzhou, China, 26–27 August 2013; IEEE: Piscataway, NJ, USA, 2013; Volume 2, pp. 144–147. [Google Scholar]
- Kitamura, Y.; Tanaka, T.; Kishino, F.; Yachida, M. 3-D path planning in a dynamic environment using an octree and an artificial potential field. In Proceedings of the Intelligent Robots and Systems 95.’Human Robot Interaction and Cooperative Robots’, Proceedings. 1995 IEEE/RSJ International Conference on, Pittsburgh, PA, USA, 5–9 August 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 2, pp. 474–481. [Google Scholar]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y. Solving Constrained Trajectory Planning Problems Using Biased Particle Swarm Optimization. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1685–1701. [Google Scholar] [CrossRef]
- Belge, E.; Altan, A.; Hacıoğlu, R. Metaheuristic optimization-based path planning and tracking of quadcopter for payload hold-release mission. Electronics 2022, 11, 1208. [Google Scholar] [CrossRef]
- Jia, Y.; Zhou, S.; Zeng, Q.; Li, C.; Chen, D.; Zhang, K.; Liu, L.; Chen, Z. The UAV Path Coverage Algorithm Based on the Greedy Strategy and Ant Colony Optimization. Electronics 2022, 11, 2667. [Google Scholar] [CrossRef]
- Dever, C.; Mettler, B.; Feron, E.; Popovic, J.; McConley, M. Nonlinear trajectory generation for autonomous vehicles via parameterized maneuver classes. J. Guid. Control. Dyn. 2006, 29, 289–302. [Google Scholar] [CrossRef]
- Frazzoli, E.; Dahleh, M.A.; Feron, E. Real-time motion planning for agile autonomous vehicles. Am. Control Conf. 2001, 1, 43–49. [Google Scholar]
- Blasi, L.; Barbato, S.; D’Amato, E. A mixed probabilistic-geometric strategy for UAV optimum flight path identification based on bit-coded basic manoeuvres. Aerosp. Sci. Technol. 2017, 71, 1–11. [Google Scholar] [CrossRef]
- Blake, W.; Multhopp, D. Design, performance and modeling considerations for close formation flight. In Proceedings of the 23rd Atmospheric Flight Mechanics Conference, Boston, MA, USA, 10–12 August 1998; p. 4343. [Google Scholar]
- Chichka, D.F.; Speyer, J.L. Solar-powered, formation-enhanced aerial vehicle systems for sustained endurance. Am. Control Conf. 1998, 2, 684–688. [Google Scholar]
- Proud, A.; Pachter, M.; D’Azzo, J. Close formation flight control. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999; p. 4207. [Google Scholar]
- Pachter, M.; D’Azzo, J.J.; Proud, A.W. Tight formation flight control. J. Guid. Control. Dyn. 2001, 24, 246–254. [Google Scholar] [CrossRef]
- Schumacher, C.; Singh, S. Nonlinear control of multiple UAVs in close-coupled formation flight. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Dever, CO, USA, 14–17 August 2000; p. 4373. [Google Scholar]
- Mohiuddin, A.; Tarek, T.; Zweiri, Y.; Gan, D. A survey of single and multi-UAV aerial manipulation. Unmanned Syst. 2020, 8, 119–147. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Girard, A.R.; Howell, A.S.; Hedrick, J.K. Border patrol and surveillance missions using multiple unmanned air vehicles. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1, pp. 620–625. [Google Scholar]
- Merino, L.; Caballero, F.; Martinez-de Dios, J.; Ollero, A. Cooperative fire detection using unmanned aerial vehicles. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 1884–1889. [Google Scholar]
- Zengin, U.; Dogan, A. Real-time target tracking for autonomous UAVs in adversarial environments: A gradient search algorithm. IEEE Trans. Robot. 2007, 23, 294–307. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, D. Adversarial ground target tracking using UAVs with input constraints. J. Intell. Robot. Syst. 2012, 65, 521–532. [Google Scholar] [CrossRef]
- Li, X.; Ci, L.; Yang, M.; Wei, H.; Tian, C.; Cheng, B. Multi-decision making based PSO optimization in airborne mobile sensor network deployment. In Proceedings of the 2012 IEEE 6th International Symposium on Embedded Multicore SoCs, Fukushima, Japan, 20–22 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 128–134. [Google Scholar]
- Sastry, S.; Meyer, G.; Tomlin, C.; Lygeros, J.; Godbole, D.; Pappas, G. Hybrid control in air traffic management systems. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 2, pp. 1478–1483. [Google Scholar]
- Bellingham, J.; Tillerson, M.; Richards, A.; How, J.P. Multi-task allocation and path planning for cooperating UAVs. In Cooperative Control: Models, Applications and Algorithms; Springer: Berlin/Heidelberg, Germany, 2003; pp. 23–41. [Google Scholar]
- Yu, H.; Meier, K.; Argyle, M.; Beard, R.W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEE/ASME Trans. Mechatron. 2015, 20, 541–552. [Google Scholar] [CrossRef]
- Shorakaei, H.; Vahdani, M.; Imani, B.; Gholami, A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica 2016, 34, 823–836. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Su, Z. Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs. Aerosp. Sci. Technol. 2016, 54, 10–22. [Google Scholar] [CrossRef]
- Wu, J.; Yi, J.; Gao, L.; Li, X. Cooperative path planning of multiple UAVs based on PH curves and harmony search algorithm. In Proceedings of the Computer Supported Cooperative Work in Design (CSCWD), 2017 IEEE 21st International Conference on, Wellington, New Zealand, 26–28 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 540–544. [Google Scholar]
- Chandler, P.; Rasmussen, S.; Pachter, M. UAV cooperative path planning. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Dever, CO, USA, 14–17 August 2000; p. 4370. [Google Scholar]
- Tsourdos, A.; White, B.; Shanmugavel, M. Cooperative Path Planning of Unmanned Aerial Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 32. [Google Scholar]
- Lian, F.L.; Murray, R. Real-time trajectory generation for the cooperative path planning of multi-vehicle systems. In Proceedings of the Decision and Control, 2002, Proceedings of the 41st IEEE Conference on, Las Vegas, NV, USA, 10–13 December 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 4, pp. 3766–3769. [Google Scholar]
- Anderson, M.; Robbins, A. Formation flight as a cooperative game. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Boston, MA, USA, 10–12 August 1998; p. 4124. [Google Scholar]
- Kuriki, Y.; Namerikawa, T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system. In Proceedings of the American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2077–2082. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: Berlin/Heidelberg, Germany, 2008; Volume 27. [Google Scholar]
- Ariola, M.; Mattei, M.; D’Amato, E.; Notaro, I.; Tartaglione, G. Model predictive control for a swarm of fixed wing uavs. In Proceedings of the 30Th Congress of the international council of the aeronautical sciences, Daejeon, Republic of Korea, 25–30 September 2016. [Google Scholar]
- Blasi, L.; D’Amato, E.; Mattei, M.; Notaro, I. UAV Path Planning in 3D Constrained Environments Based on Layered Essential Visibility Graphs. IEEE Trans. Aerosp. Electron. Syst. 2022, 1–30. [Google Scholar] [CrossRef]
- Al Nuaimi, M. Analysis and Comparison of Clothoid and Dubins Algorithms for UAV Trajectory Generation; West Virginia University: Morgantown, WY, USA, 2014. [Google Scholar]
- Tuttle, T.; Wilhelm, J.P. Minimal length multi-segment clothoid return paths for vehicles with turn rate constraints. Front. Aerosp. Eng. 2022, 1. [Google Scholar] [CrossRef]
- Bertolazzi, E.; Frego, M. Interpolating clothoid splines with curvature continuity. Math. Methods Appl. Sci. 2018, 41, 1723–1737. [Google Scholar] [CrossRef]
- Meek, D.; Walton, D. Clothoid spline transition spirals. Math. Comput. 1992, 59, 117–133. [Google Scholar] [CrossRef]
- Fraichard, T.; Scheuer, A. From Reeds and Shepp’s to continuous-curvature paths. IEEE Trans. Robot. 2004, 20, 1025–1035. [Google Scholar] [CrossRef]
- Wilde, D.K. Computing clothoid segments for trajectory generation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St Louis, MI, USA, 11–15 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2440–2445. [Google Scholar]
- Gim, S.; Adouane, L.; Lee, S.; Derutin, J.P. Clothoids composition method for smooth path generation of car-like vehicle navigation. J. Intell. Robot. Syst. 2017, 88, 129–146. [Google Scholar] [CrossRef]
- McLain, T.; Beard, R.W.; Owen, M. Implementing dubins airplane paths on fixed-wing uavs. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Dubins, L.E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Babel, L. Coordinated target assignment and UAV path planning with timing constraints. J. Intell. Robot. Syst. 2019, 94, 857–869. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Starting Point | (0,0) m |
| Departure Heading | |
| Minimum Turning Radius | 260 m |
| Target Point | (2000,2000) m |
| Arrival Heading |
| Configuration Name | Number of Points m | Number of Directions n |
|---|---|---|
| T1 | 8 | 2 |
| T2 | 8 | 4 |
| T3 | 8 | 6 |
| T4 | 8 | 12 |
| T5 | 16 | 2 |
| T6 | 16 | 4 |
| T7 | 16 | 6 |
| T8 | 16 | 12 |
| T9 | 32 | 2 |
| T10 | 32 | 4 |
| T11 | 32 | 6 |
| T12 | 32 | 12 |
| Description | Value |
|---|---|
| Starting Point | (0,0) m |
| Departure Heading | |
| Target Point | (2000,2000) m |
| Arrival Heading | |
| Minimum Turning Radius | 260 m |
| Obstacle corner points | (600,600) m (1200,600) m (1200,1600) m (600,1600) m |
| Description | UAV #1 | UAV #2 | UAV #3 |
|---|---|---|---|
| Starting Points | (0,0) m | (0,300) m | (0,600) m |
| Departure Heading | |||
| Target Points | (2000,1600) m | (2000,2000) m | (2000,1800) m |
| Arrival Direction | |||
| Minimum Turning Radius | 260 m | ||
| Minimum speed | 5 m/s | ||
| Maximum speed | 25 m/s | ||
| Minimum acceleration | m/s2 | ||
| Maximum acceleration | 10 m/s2 | ||
| Safety distance | 20 m | ||
| Obstacle corner points | (1000,0) m (1500,0) m (1500,1000) m (1000,1000) m | ||
| Obstacle corner points | (0,1600) m (800,1600) m (800,2000) m (0,2000) m | ||
| Arrival Time | |
|---|---|
| UAV 1 | 149.9 s |
| UAV 2 | 136.4 s |
| UAV 3 | 162.3 s |
| Description | Value |
|---|---|
| Minimum turning radius | 260 m |
| Minimum speed | 5 m/s |
| Maximum speed | 25 m/s |
| Minimum acceleration | m/s2 |
| Maximum acceleration | 10 m/s2 |
| Safety distance | 20 m |
| Obstacle corner points | (1000,0) m (1500,0) m (1500,1000) m (1000,1000) m |
| Obstacle corner points | (1000,1400) m (1500,1400) m (1500,2000) m (1000,2000) m |
| UAV | #1 | #2 | #3 | #4 | #5 | #6 | #7 | #8 | #9 | #10 |
|---|---|---|---|---|---|---|---|---|---|---|
| #1 | 0 | 20.82 | 38.59 | 111.53 | 107.53 | 216.80 | 297.07 | 247.11 | 352.95 | 69.20 |
| #2 | 20.82 | 0 | 20.87 | 172.74 | 96.30 | 98.28 | 309.93 | 331.06 | 374.35 | 402.15 |
| #3 | 38.59 | 20.87 | 0 | 111.11 | 59.32 | 69.60 | 271.28 | 290.09 | 328.67 | 333.71 |
| #4 | 111.53 | 172.74 | 111.11 | 0 | 20.51 | 20.40 | 130.72 | 111.43 | 193.88 | 71.15 |
| #5 | 107.53 | 96.30 | 59.32 | 20.51 | 0 | 20.79 | 109.27 | 130.16 | 172.45 | 222.32 |
| #6 | 216.80 | 98.28 | 69.60 | 20.40 | 20.79 | 0 | 78.15 | 97.58 | 137.08 | 280.44 |
| #7 | 297.07 | 309.93 | 271.28 | 130.72 | 109.27 | 78.15 | 0 | 20.67 | 61.83 | 42.40 |
| #8 | 247.11 | 331.06 | 290.09 | 111.43 | 130.16 | 97.58 | 20.67 | 0 | 41.25 | 36.35 |
| #9 | 352.95 | 374.35 | 328.67 | 193.88 | 172.45 | 137.08 | 61.83 | 41.25 | 0 | 20.90 |
| #10 | 69.20 | 402.15 | 333.71 | 71.15 | 222.32 | 280.44 | 42.40 | 36.35 | 20.90 | 0 |
| Scenario | VG + Dubins | Clothoids-Based |
|---|---|---|
| Number of UAVs | 13 | 13 |
| Minimum Turning Radius (m) | 260 | 260 |
| Number of Obstacles | 12 | 12 |
| Sum of UAV Path Lengths (km) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blasi, L.; D’Amato, E.; Notaro, I.; Raspaolo, G. Clothoid-Based Path Planning for a Formation of Fixed-Wing UAVs. Electronics 2023, 12, 2204. https://doi.org/10.3390/electronics12102204
Blasi L, D’Amato E, Notaro I, Raspaolo G. Clothoid-Based Path Planning for a Formation of Fixed-Wing UAVs. Electronics. 2023; 12(10):2204. https://doi.org/10.3390/electronics12102204
Chicago/Turabian StyleBlasi, Luciano, Egidio D’Amato, Immacolata Notaro, and Gennaro Raspaolo. 2023. "Clothoid-Based Path Planning for a Formation of Fixed-Wing UAVs" Electronics 12, no. 10: 2204. https://doi.org/10.3390/electronics12102204