
Fuzzy Compensation and Load Disturbance Adaptive Control Strategy for Electro-Hydraulic Servo Pump Control System


Abstract
:1. Introduction
2. Mathematical Modeling and Analysis of Electro-Hydraulic Servo Closed Pump Control System
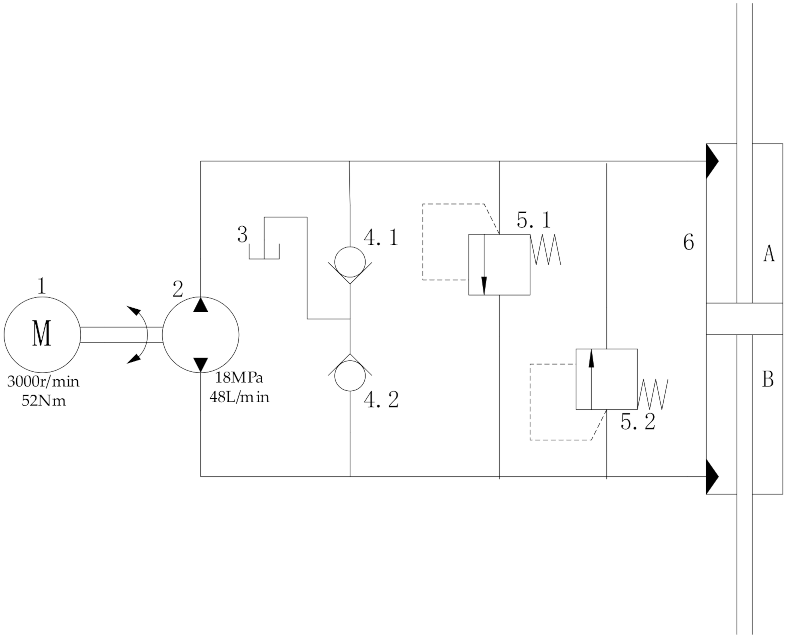
2.1. System Working Principle
2.2. Mathematical Model Establishment
2.2.1. Mathematical Model of Servo Motor
2.2.2. Mathematical Model of Hydraulic Pump Cylinder Control
3. Load Disturbance Compensation Control Method
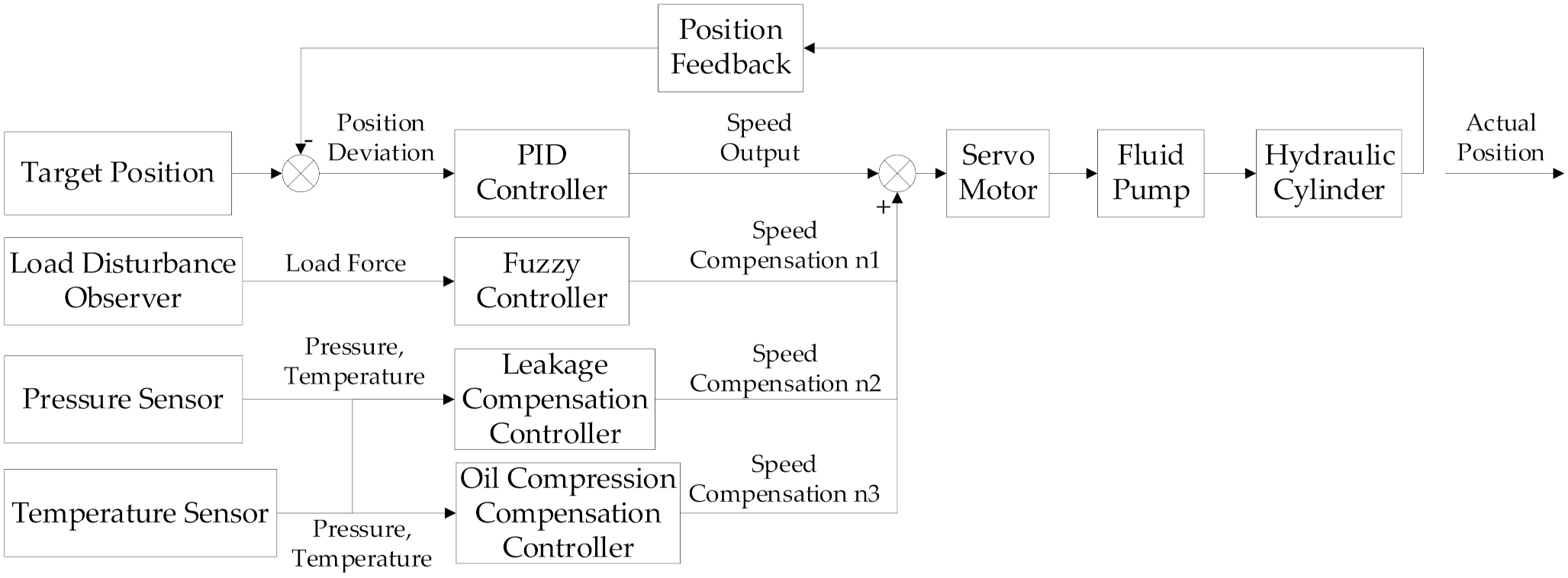
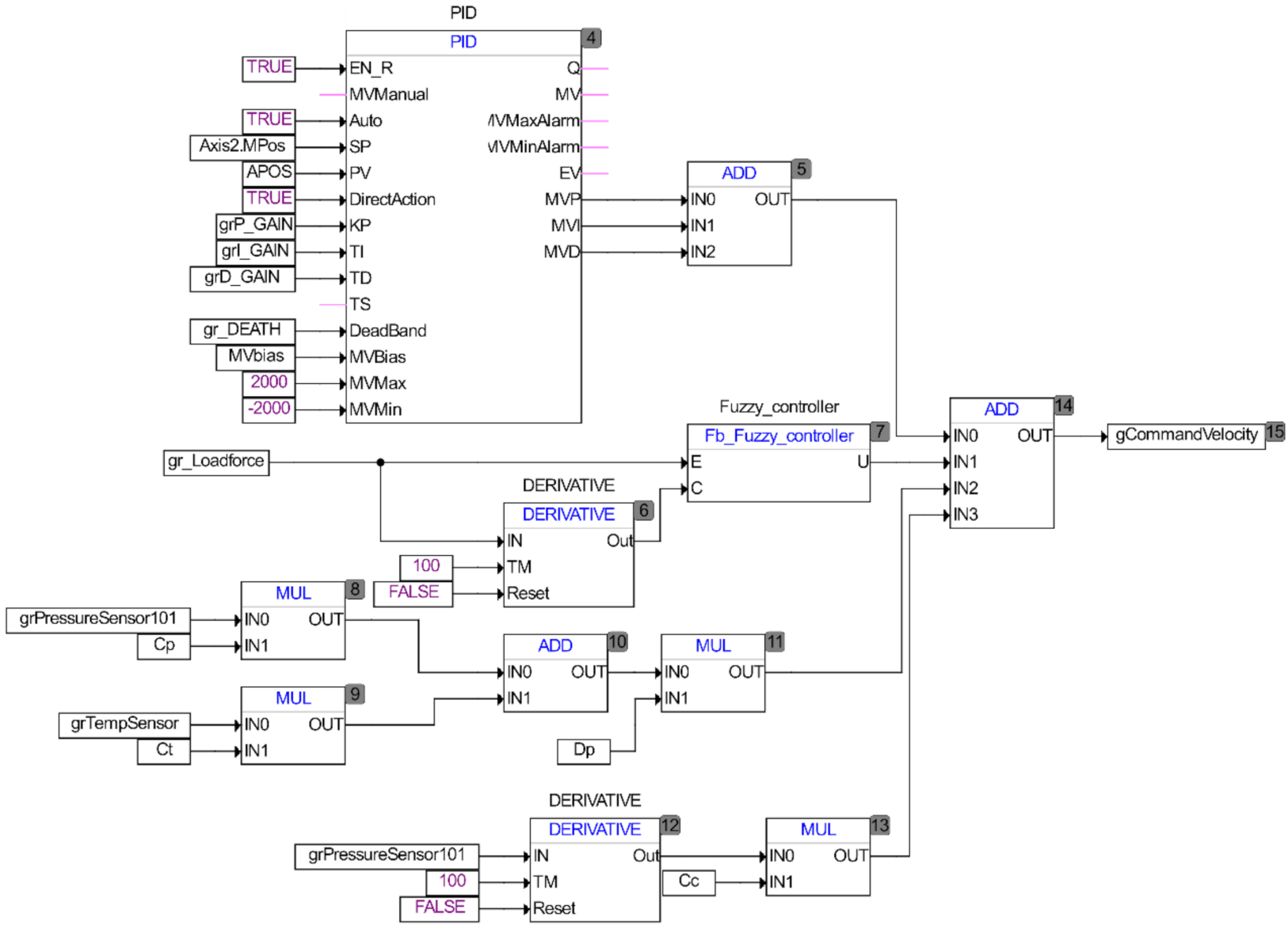
3.1. Control Strategy of System
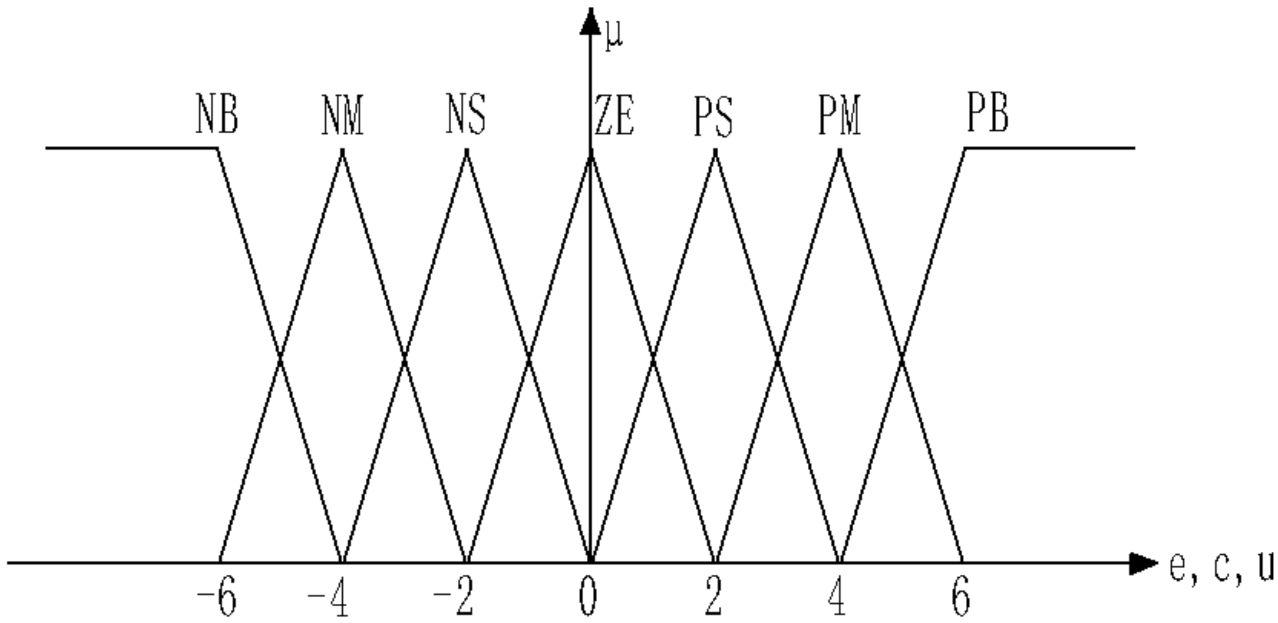
3.2. Fuzzy Compensation Control Algorithm
3.3. System Leakage Compensation Control
3.4. Oil Compression Compensation Control
4. Experimental Analysis
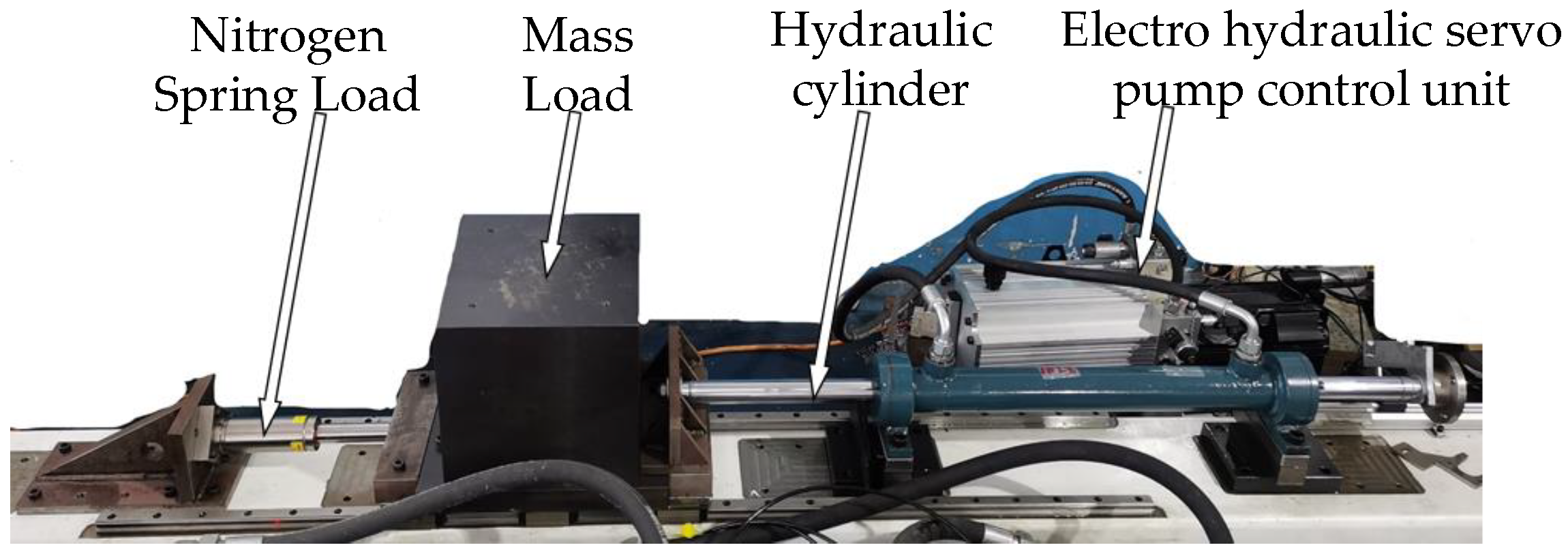
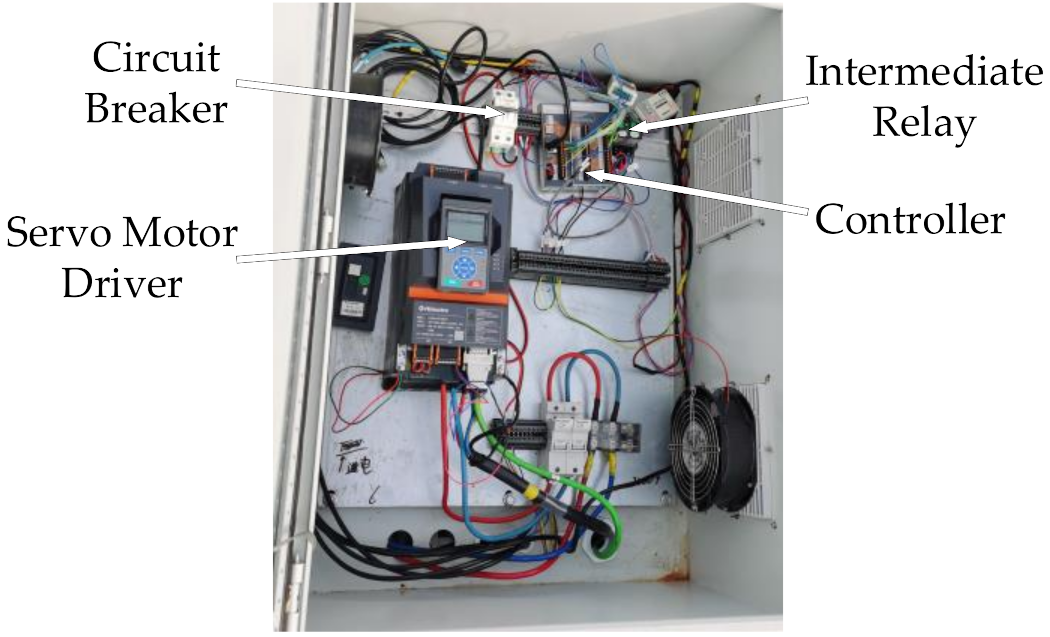
4.1. Experimental Platform
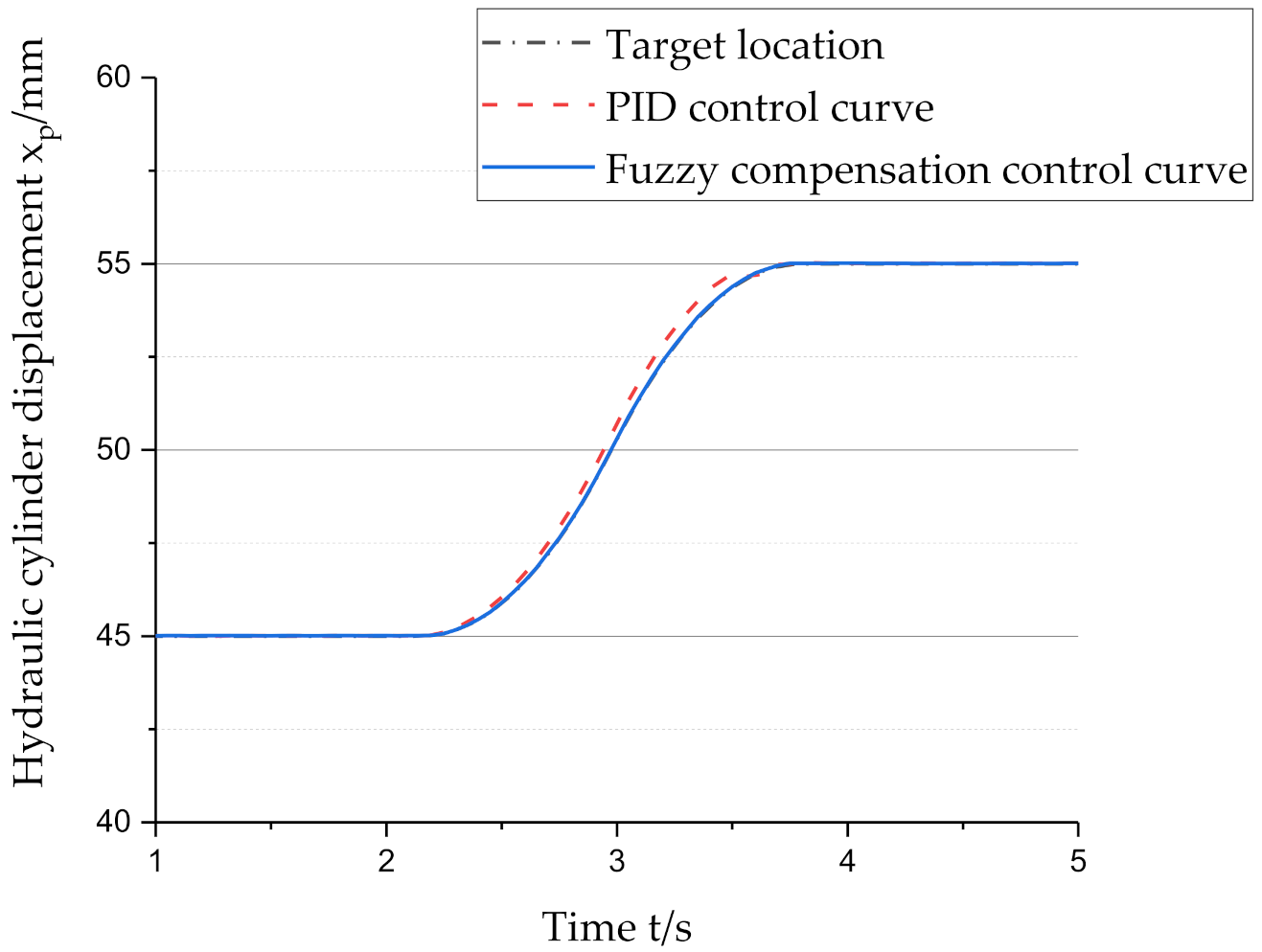
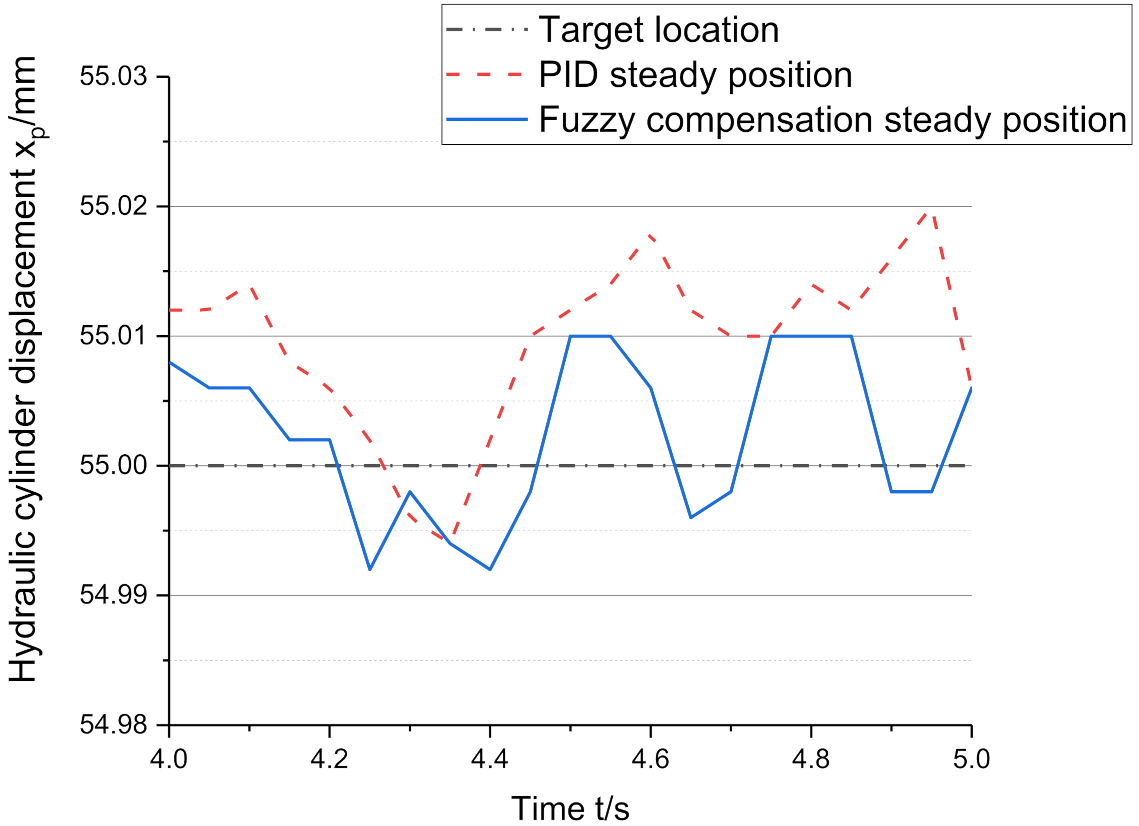
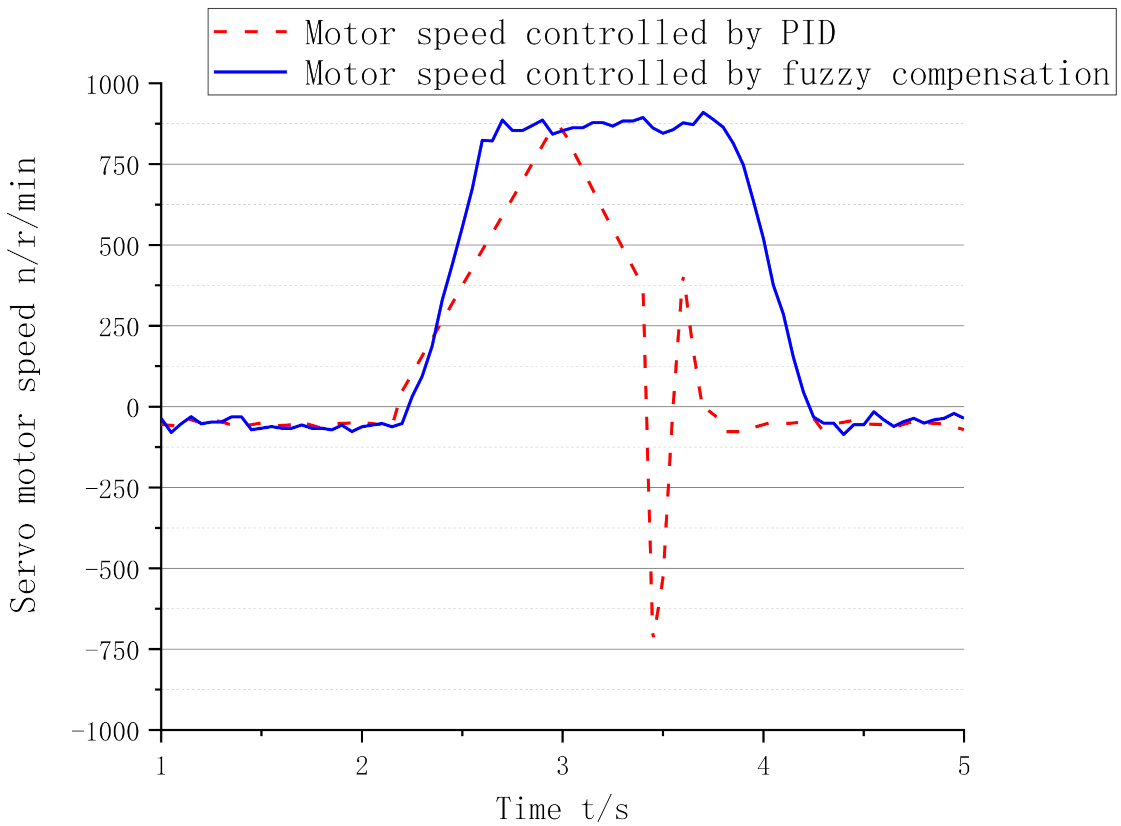
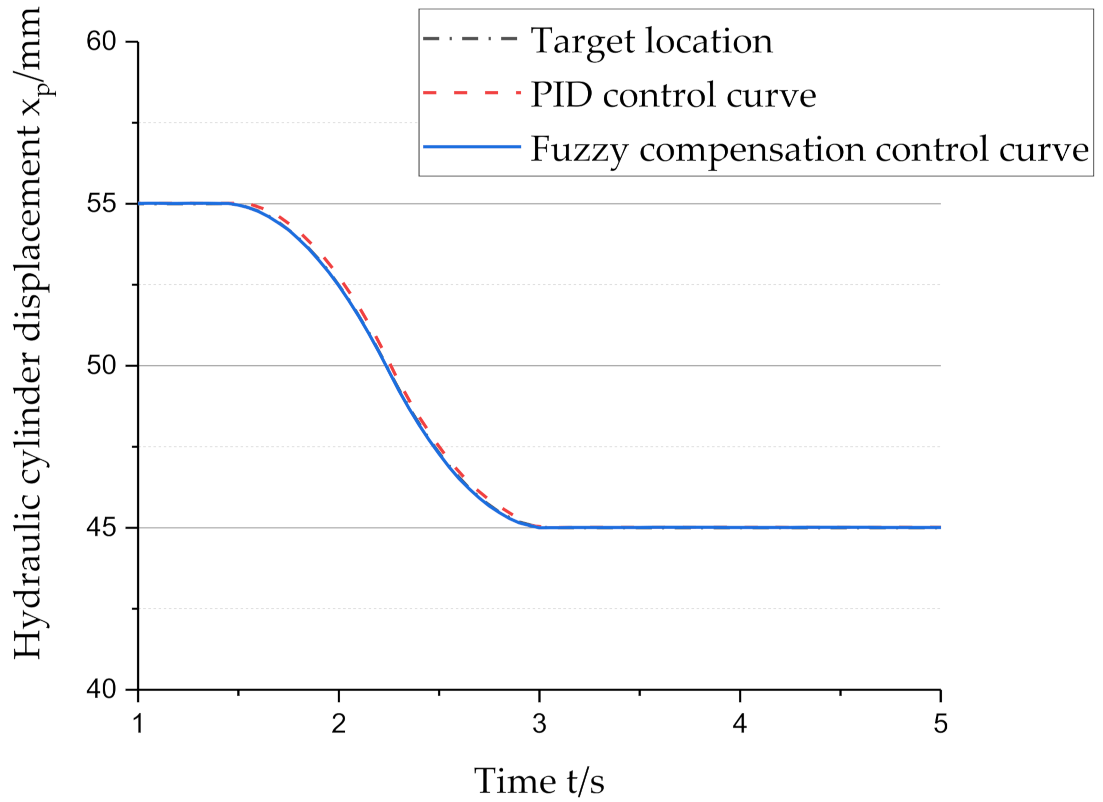
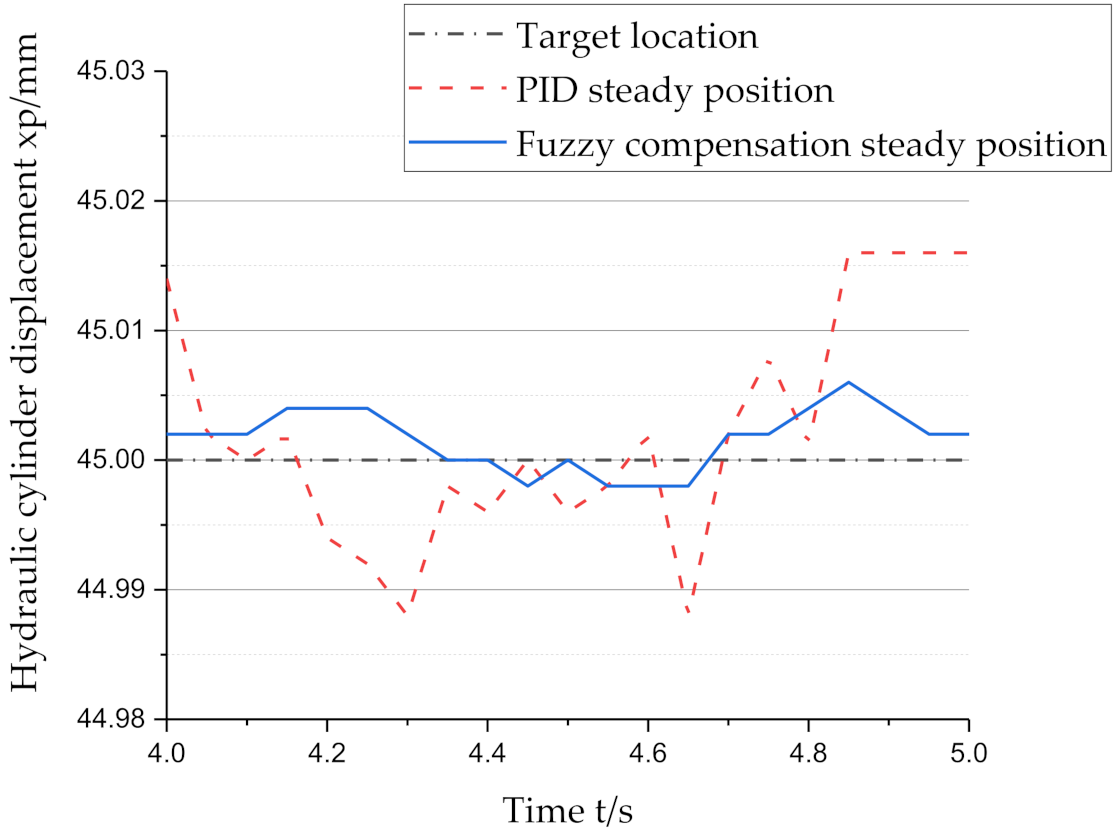
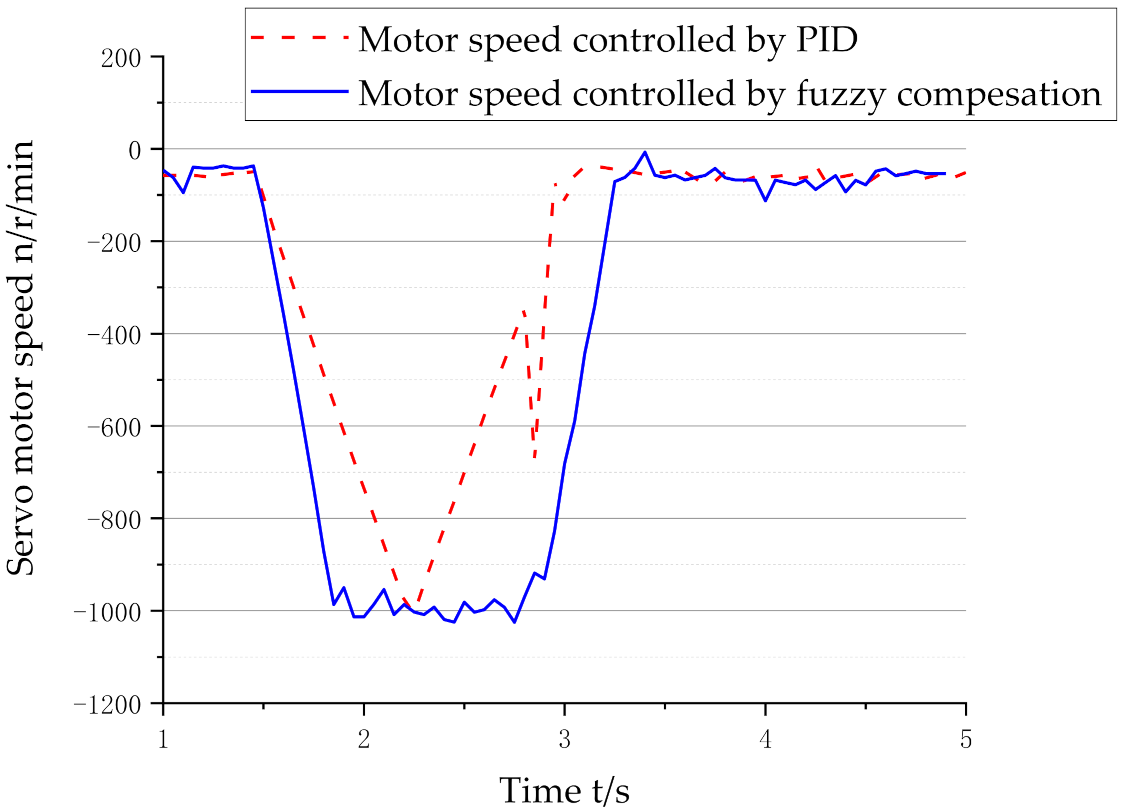
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, Q.; Li, X.; Jiang, D. Full-state error constraints based dynamic surface control of electro-hydraulic system. IEEE Access 2018, 6, 53092–53101. [Google Scholar] [CrossRef]
- Mahato, A.C.; Ghoshal, S.K. Energy-saving strategies on power hydraulic system: An overview. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 147–169. [Google Scholar] [CrossRef]
- Shang, Y.; Li, X.; Wu, S.; Pan, Q.; Huang, L.; Qian, H.; Jiao, Z. A novel electro hydrostatic actuator system with energy recovery module for more electric aircraft. IEEE Trans. Ind. Electron. 2019, 67, 2991–2999. [Google Scholar] [CrossRef]
- Chen, W.; Wang, X.; Zhang, F.; Liu, H.; Lin, Y. Review of the application of hydraulic technology in wind turbine. Wind. Energy 2020, 23, 1495–1522. [Google Scholar] [CrossRef]
- Ma, K.; Sun, D.; Sun, G.; Kan, Y.; Shi, J. Design and efficiency analysis of wet dual clutch transmission decentralised pump-controlled hydraulic system. Mech. Mach. Theory 2020, 154, 104003. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, X.; Quan, L.; Zhang, H. Research on energy consumption of injection molding machine driven by five different types of electro-hydraulic power units. J. Clean. Prod. 2020, 242, 118355. [Google Scholar] [CrossRef]
- Suzuki, R.; Komagata, M.; Ko, T.; Murotani, K.; Kaminaga, H.; Tatano, M.; Yamamoto, K.; Nakamura, Y. Development of 3-DOF wrist mechanism for electro-hydrostatically driven robot arm. Adv. Robot. 2020, 34, 958–973. [Google Scholar] [CrossRef]
- Ji, X.; Wang, C.; Zhang, Z.; Chen, S.; Guo, X. Nonlinear adaptive position control of hydraulic servo system based on sliding mode back-stepping design method. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2021, 235, 474–485. [Google Scholar] [CrossRef]
- Ren, G.; Esfandiari, M.; Song, J.; Sepehri, N. Position control of an electrohydrostatic actuator with tolerance to internal leakage. IEEE Trans. Control Syst. Technol. 2016, 24, 2224–2232. [Google Scholar] [CrossRef]
- Fu, Y.; Han, X.; Sepehri, N.; Zhou, G.; Fu, J.; Yu, L.; Yang, R. Design and performance analysis of position-based impedance control for an electrohydrostatic actuation system. Chin. J. Aeronaut. 2018, 31, 584–596. [Google Scholar] [CrossRef]
- Esfandiari, M.; Sepehri, N. Controller Design and Stability Analysis of Output Pressure Regulation in Electrohydrostatic Actuators. J. Dyn. Syst. Meas. Control 2019, 141, 041008. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Dang, T.D.; Ahn, K.K. Application of electro-hydraulic actuator system to control continuously variable transmission in wind energy converter. Energies 2019, 12, 2499. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.; Kim, M.J.; Chung, W.K. Asymptotically stable disturbance observer-based compliance control of electrohydrostatic actuators. IEEE/ASME Trans. Mechatron. 2020, 25, 195–206. [Google Scholar] [CrossRef]
- Suh, S.; Kim, W. Nonlinear position control using differential flatness concept with load torque observer for electro hydraulic actuators with sinusoidal load torque. Mathematics 2020, 8, 1484. [Google Scholar] [CrossRef]
- Van Nguyen, T.; Ha, C. Experimental study of sensor fault-tolerant control for an electro-hydraulic actuator based on a robust nonlinear observer. Energies 2019, 12, 4337. [Google Scholar] [CrossRef] [Green Version]
- Helian, B.; Chen, Z.; Yao, B. Precision Motion Control of a Servo Motor-Pump Direct Drive Electro-hydraulio System with a Nonlinear Pump Flow Mapping. IEEE Trans. Ind. Electron. 2019, 67, 8638–8648. [Google Scholar] [CrossRef]
- Song, B.; Lee, D.; Park, S.Y.; Baek, Y.S. Design and Performance of Nonlinear Control for an ElectroHydraulic Actuator Considering A Wearable Robot. Processes 2019, 7, 389. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy control systems: Past, present and future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U | E | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| C | NB | PB | PB | PB | PM | PM | PS | ZE |
| NM | PB | PB | PB | PS | PS | ZE | NS | |
| NS | PB | PB | PM | PS | ZE | NS | NM | |
| ZE | PM | PM | PS | ZE | NS | NM | NB | |
| PS | PM | PS | ZE | NS | NM | NB | NB | |
| PM | PS | ZE | PS | NM | NB | NB | NB | |
| PB | ZE | PS | PM | NB | NB | NB | NB | |
| Name | Numerical Value | Unit |
|---|---|---|
| Area of rod cavity of hydraulic cylinder | 0.0945 | dm2 |
| Maximum working pressure | 18 | MPa |
| Displacement of hydraulic pump | 16 | mL/r |
| Rated torque of servo motor | 52 | Nm |
| Rated power of servo motor | 10.9 | Kw |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Hu, Z.; Ai, C. Fuzzy Compensation and Load Disturbance Adaptive Control Strategy for Electro-Hydraulic Servo Pump Control System. Electronics 2022, 11, 1159. https://doi.org/10.3390/electronics11071159
Song Y, Hu Z, Ai C. Fuzzy Compensation and Load Disturbance Adaptive Control Strategy for Electro-Hydraulic Servo Pump Control System. Electronics. 2022; 11(7):1159. https://doi.org/10.3390/electronics11071159
Chicago/Turabian StyleSong, Yu, Zhongwang Hu, and Chao Ai. 2022. "Fuzzy Compensation and Load Disturbance Adaptive Control Strategy for Electro-Hydraulic Servo Pump Control System" Electronics 11, no. 7: 1159. https://doi.org/10.3390/electronics11071159