
Methods to Improve Dynamic System Response of Power Compensators Using Supercapacitors in Low-Voltage Ride-Through (LVRT) Conditions


Abstract
:1. Introduction
2. Grid-Connected Devices under LVRT Conditions
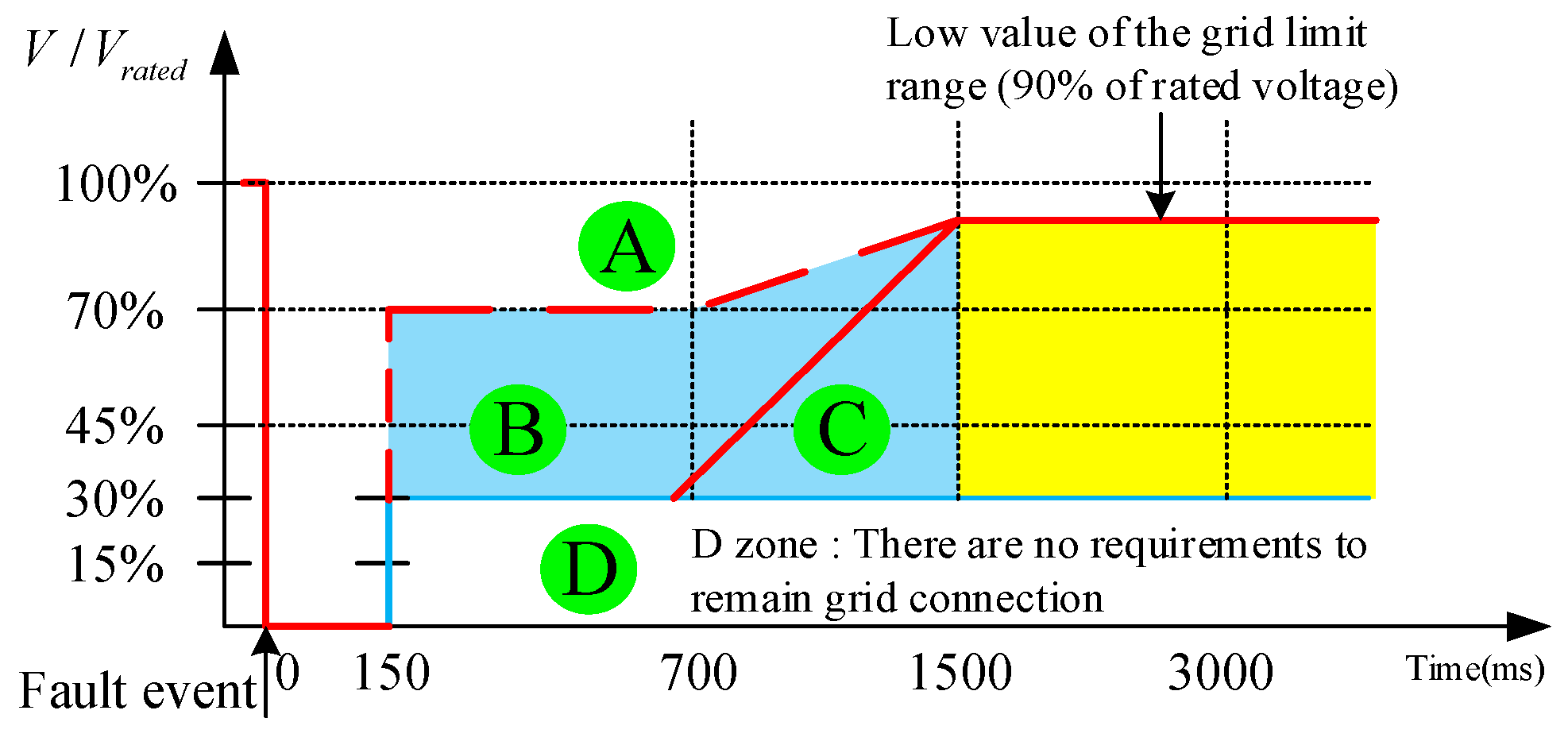
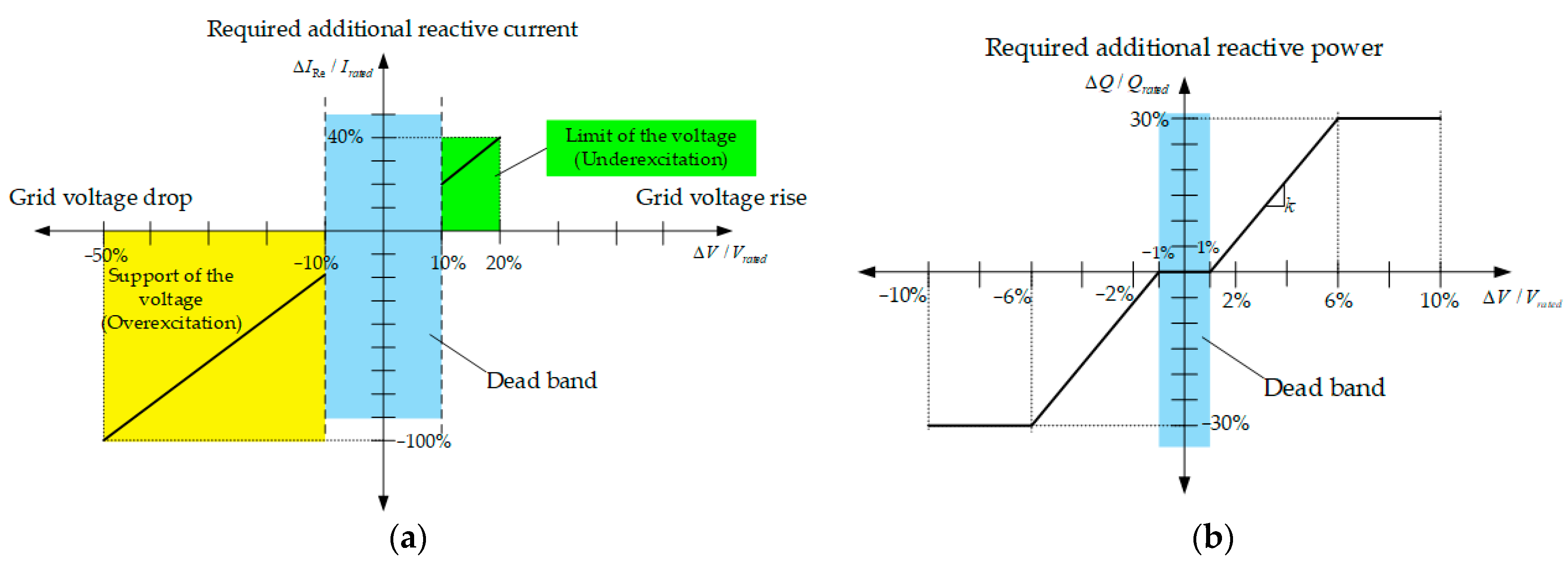
2.1. Grid Connection Standards of LVRT Conditions according to German Grid Code
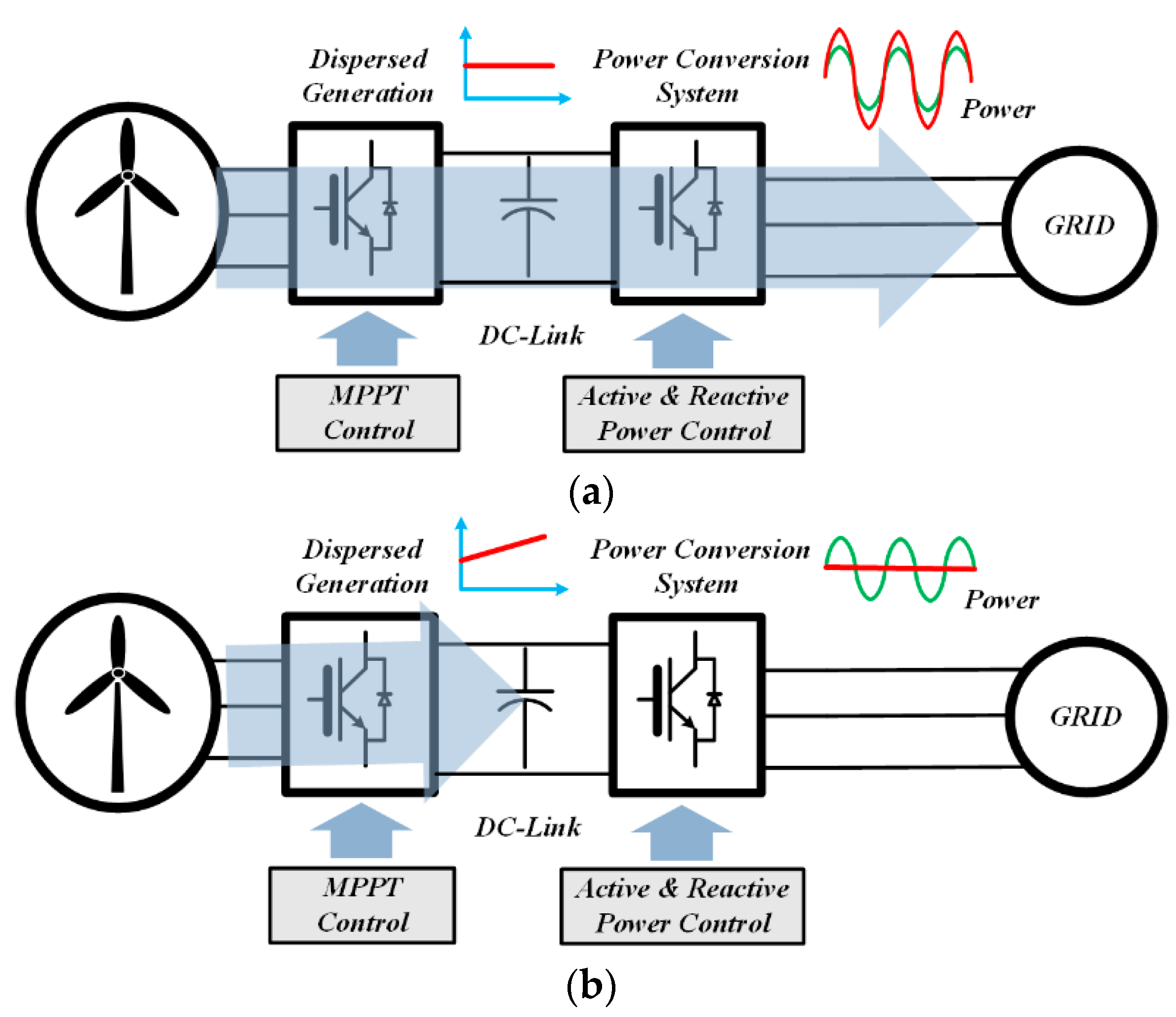
2.2. Grid-Connected Device Problems under LVRT Conditions
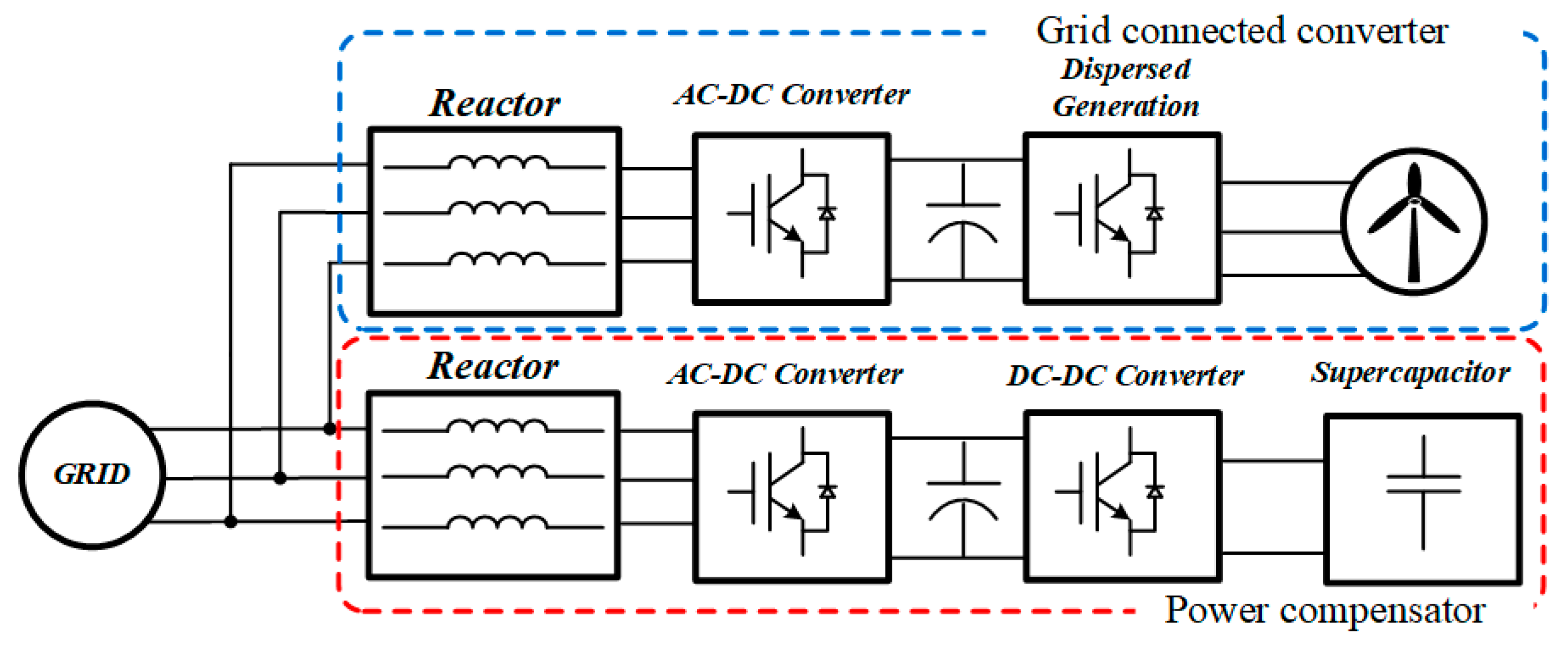
3. Grid-Connected Devices with the Proposed Power Compensator
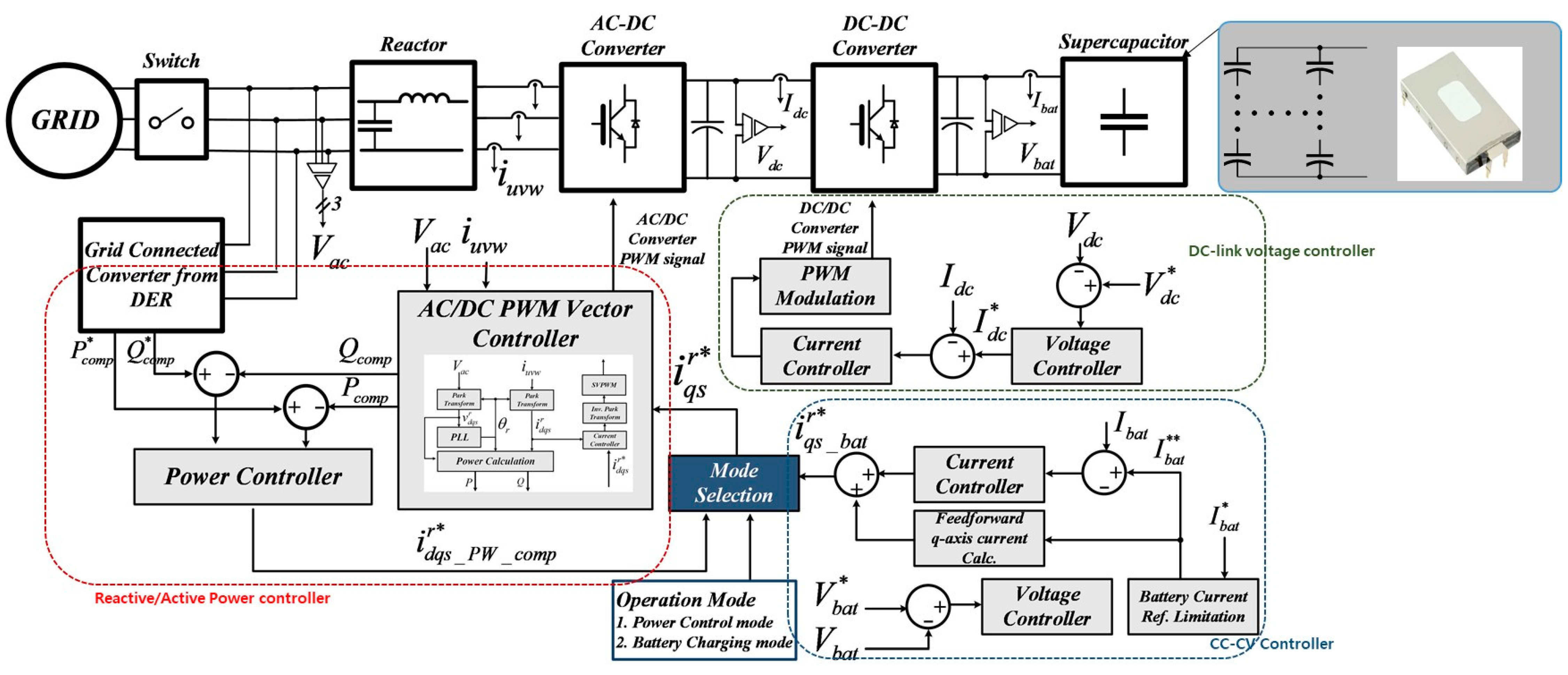
3.1. Grid-Connected Devices with Power Compensators
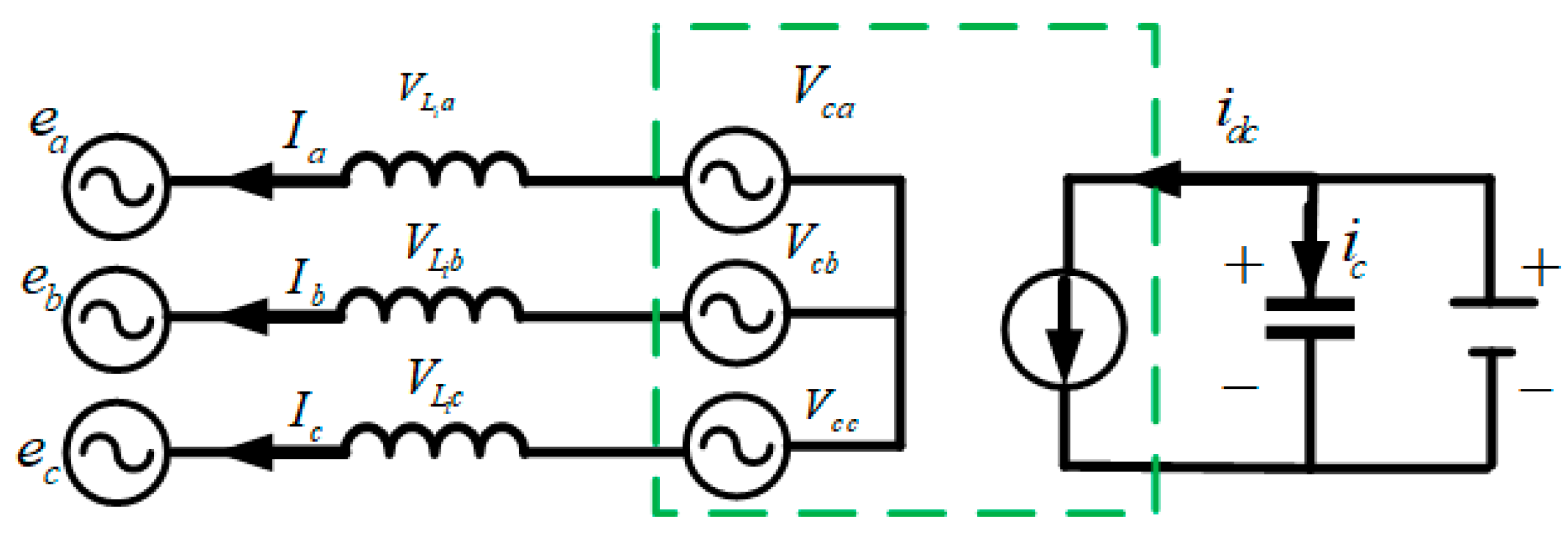
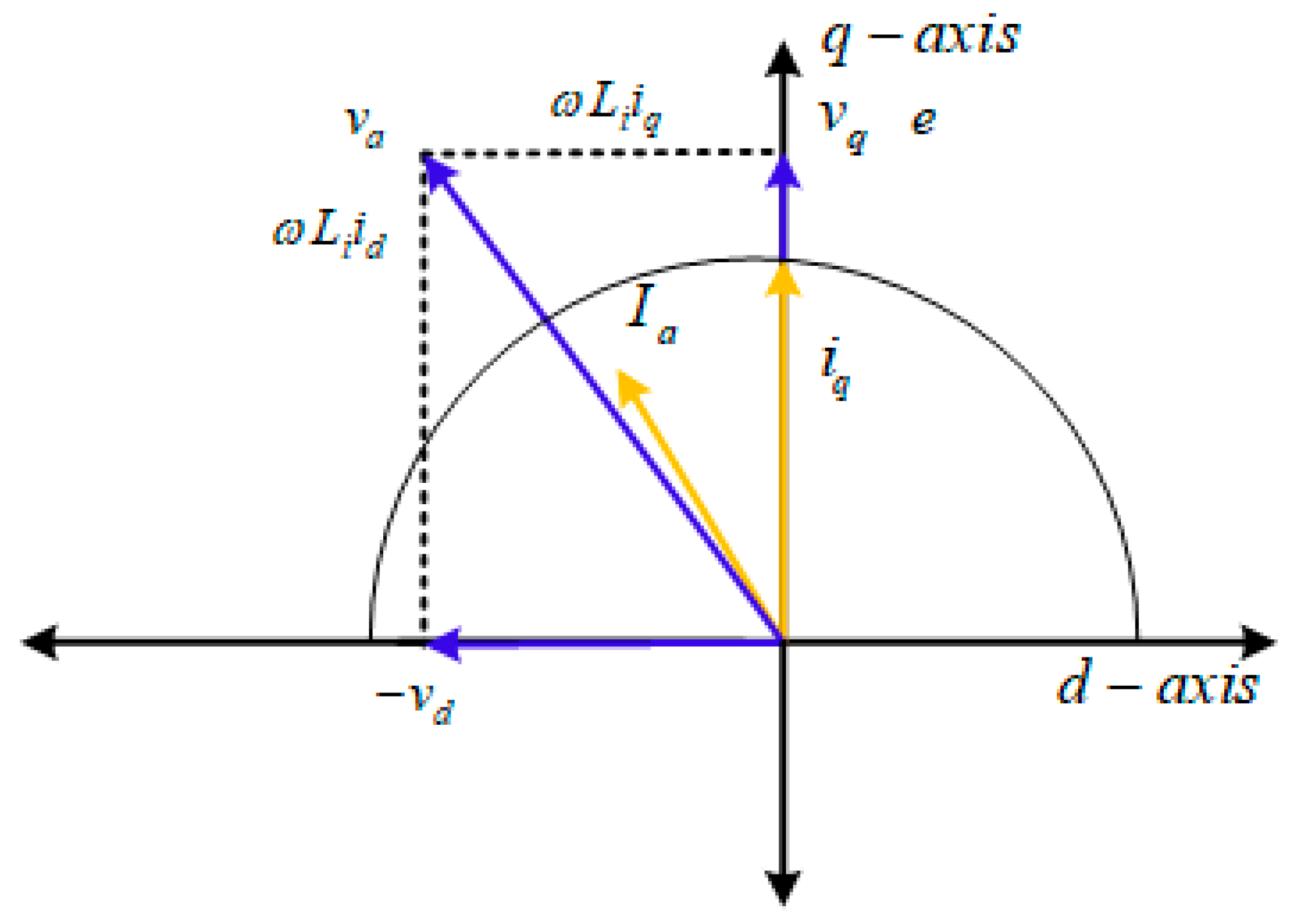
3.2. Designing a 3-Phase AC–DC Converter Reactor
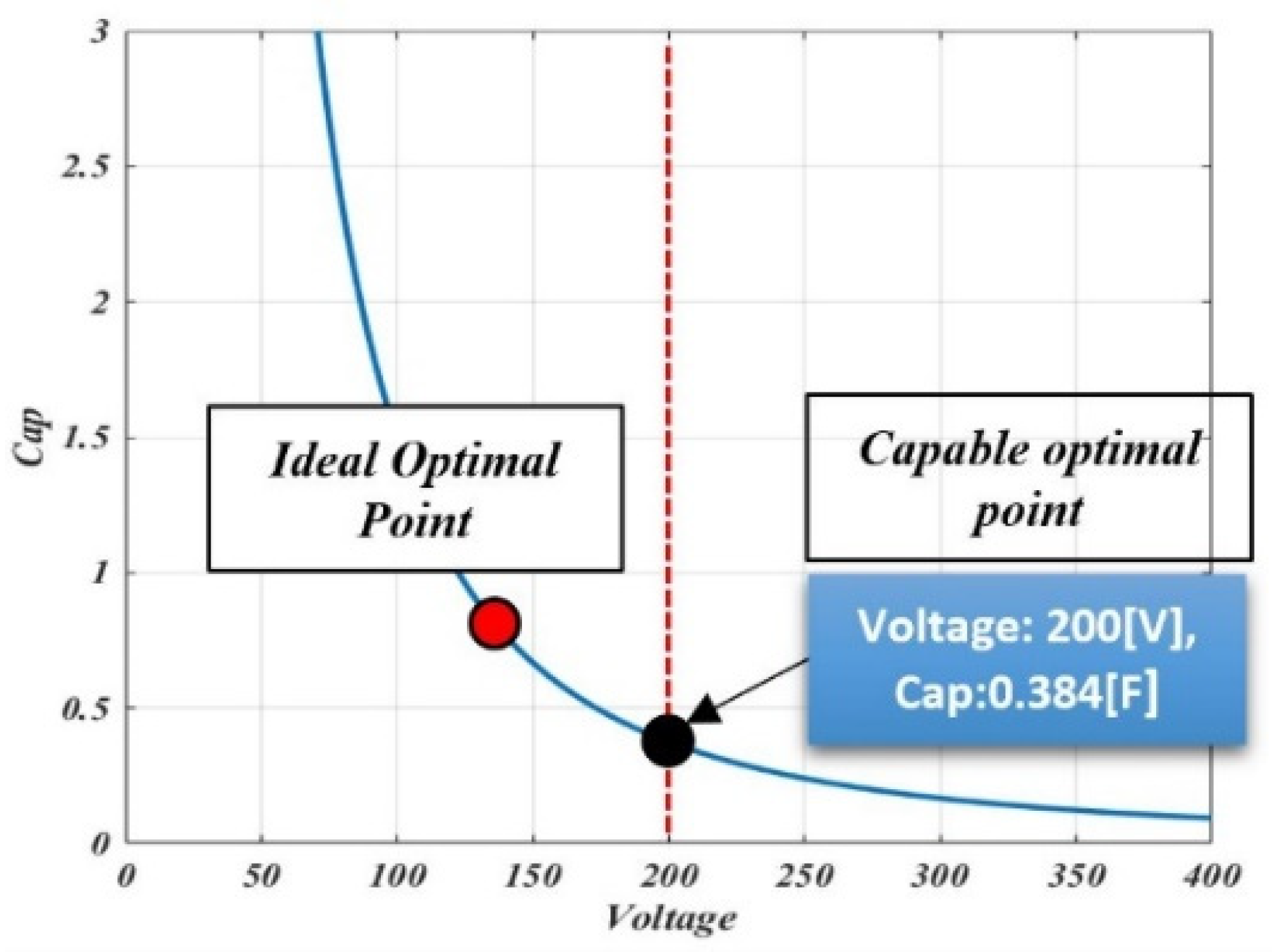
3.3. Supercapacitor Capacity Calculation and Design Method
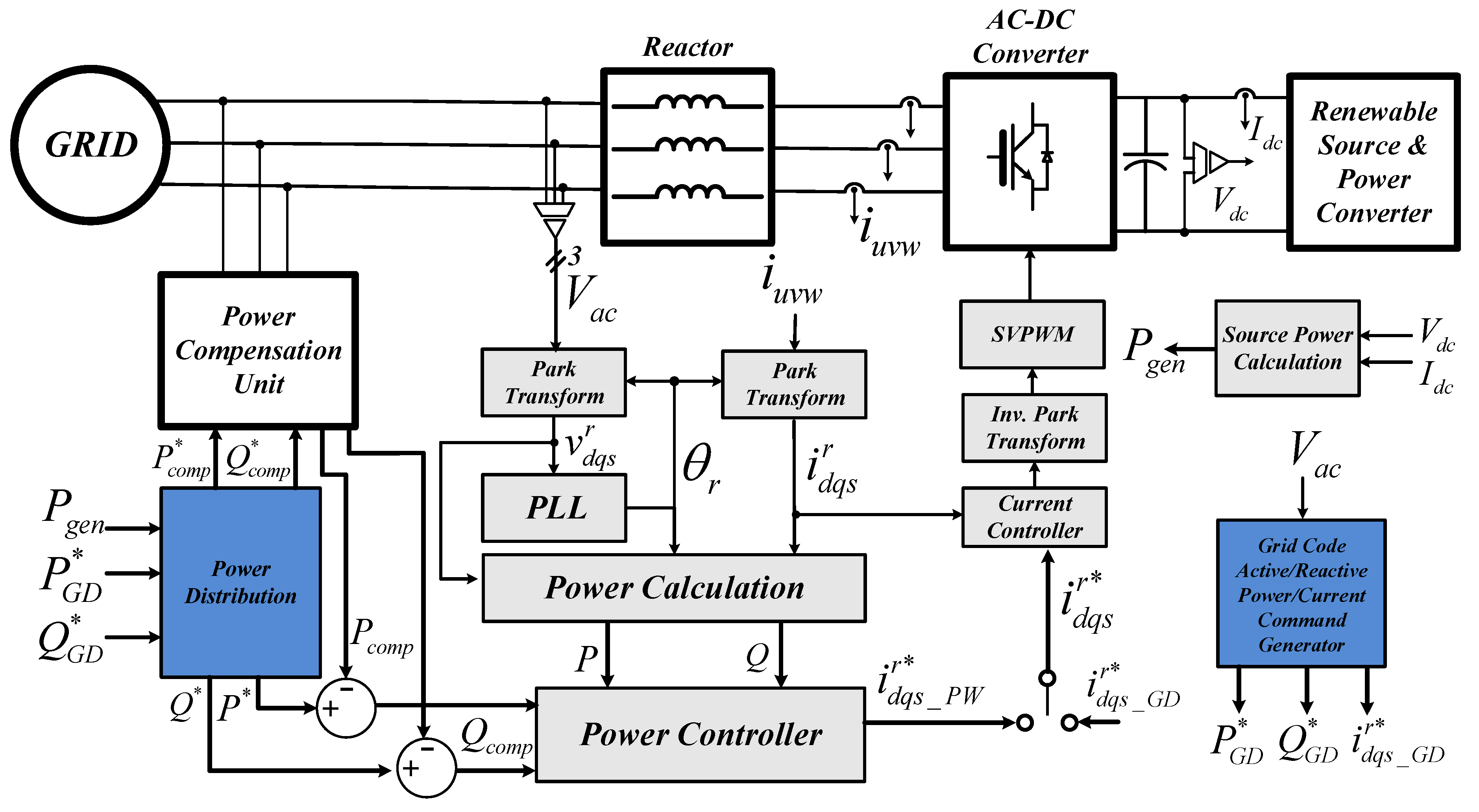
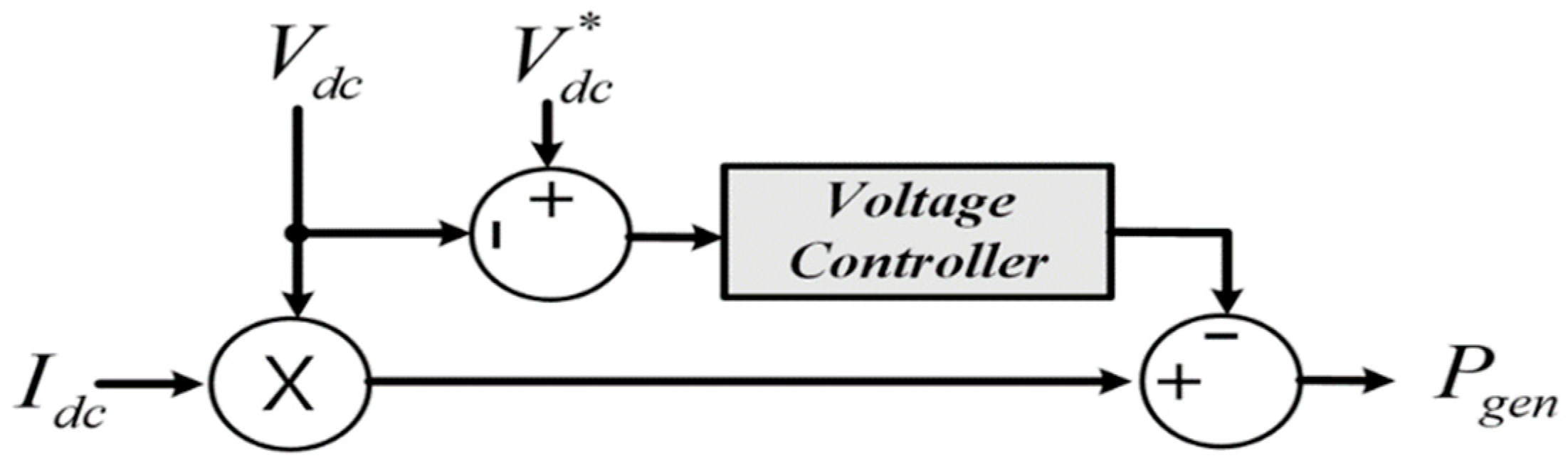
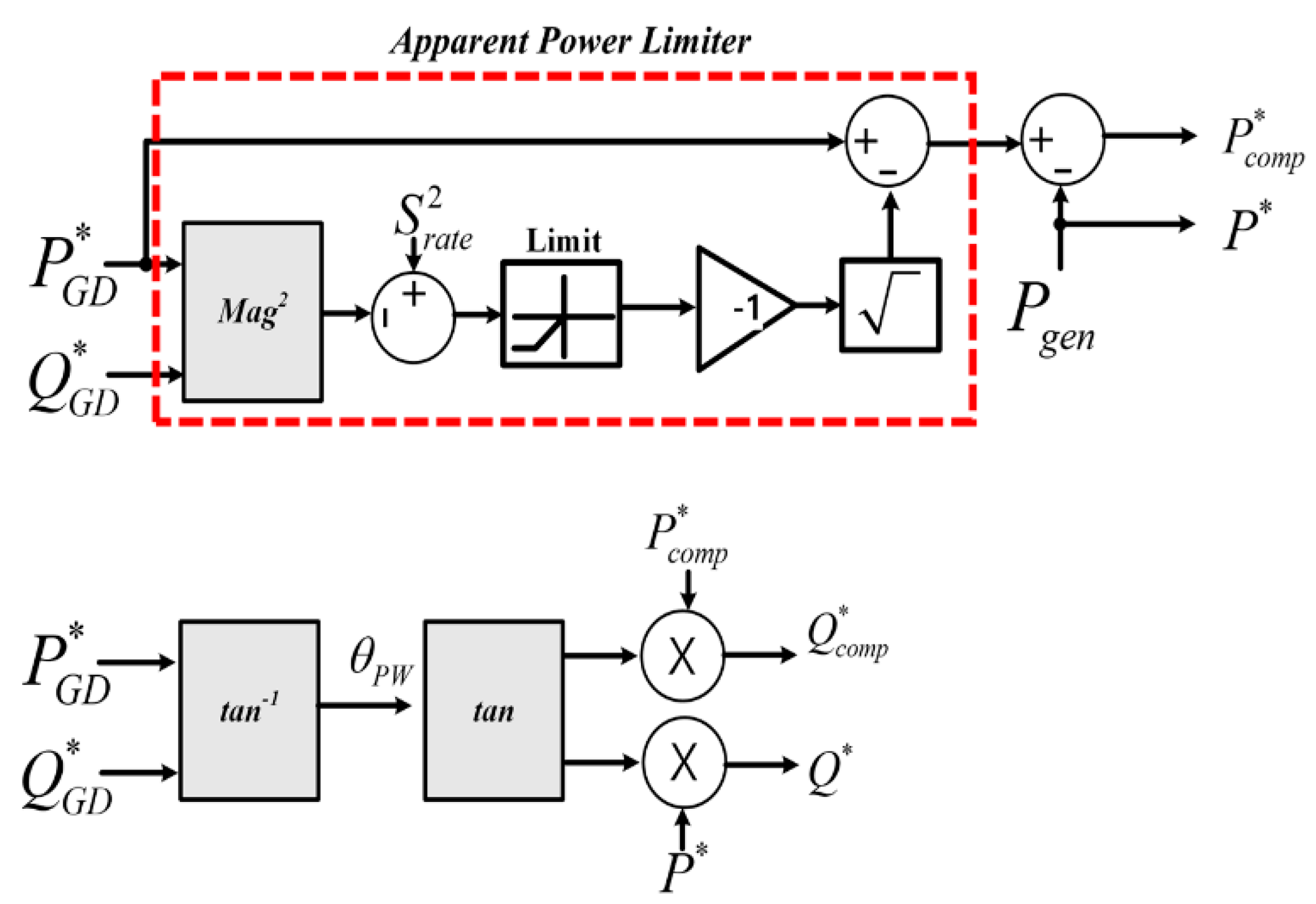
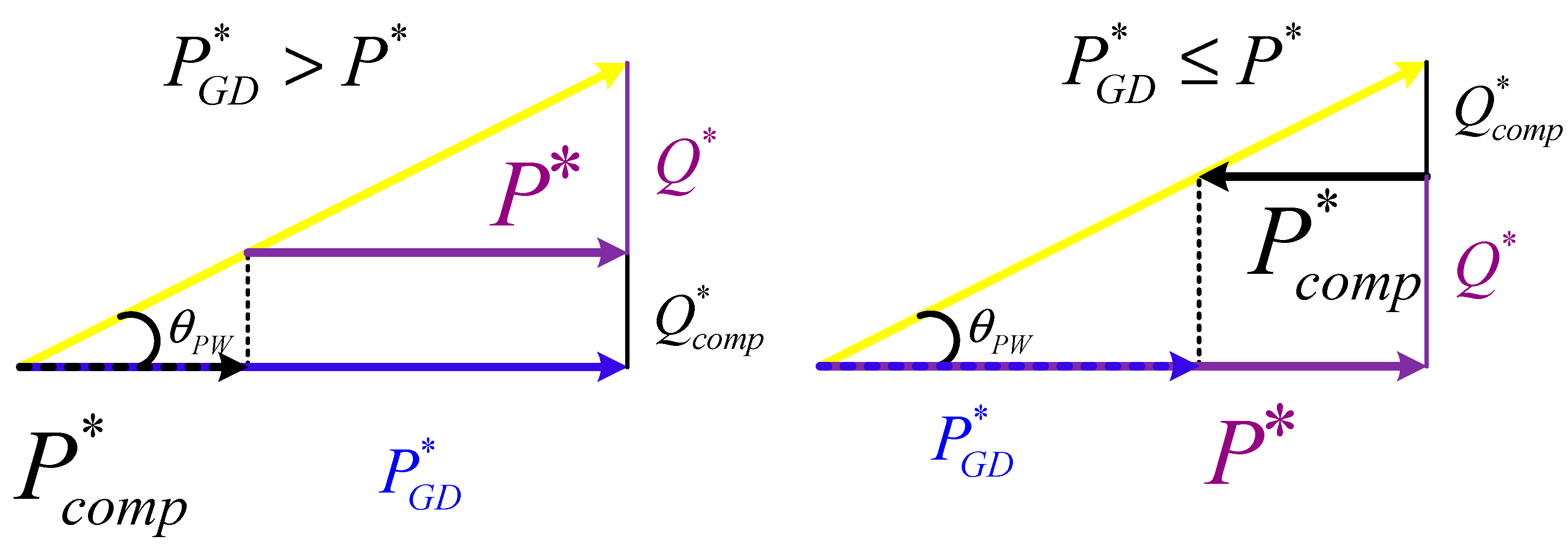
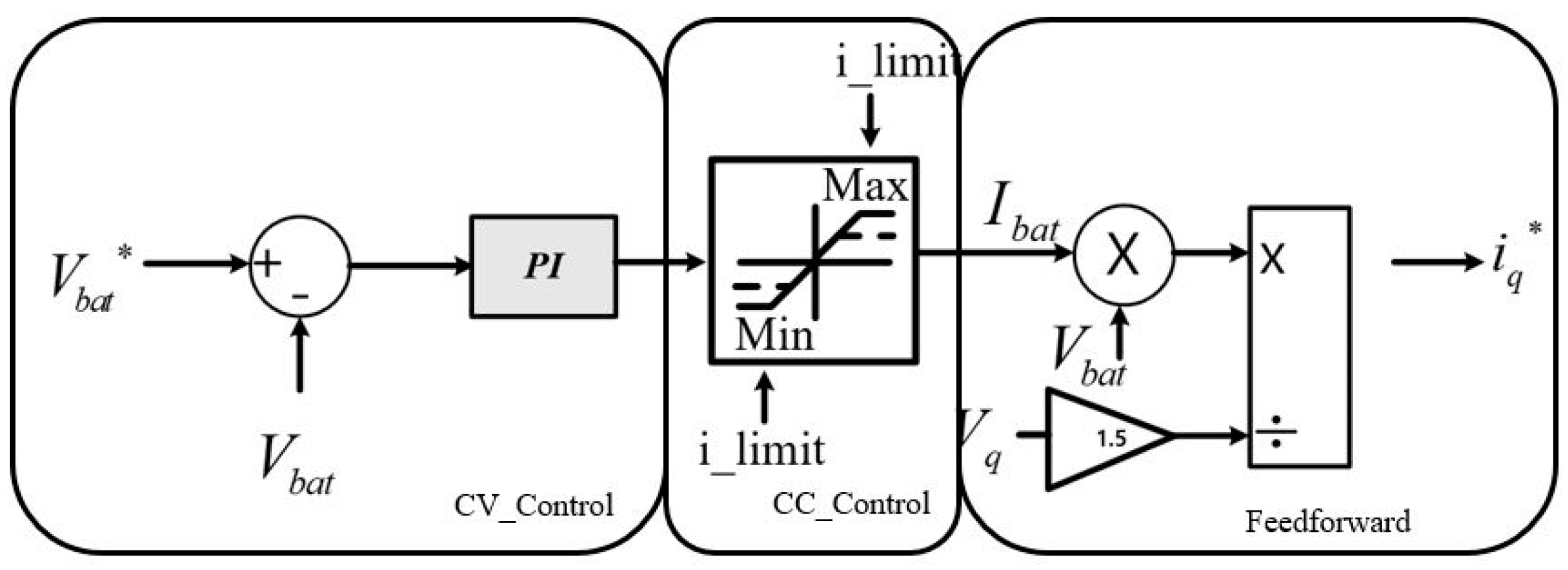
3.4. Power Compensation and Charging/Discharging Control Method of Power Compensators
4. HILS Verification
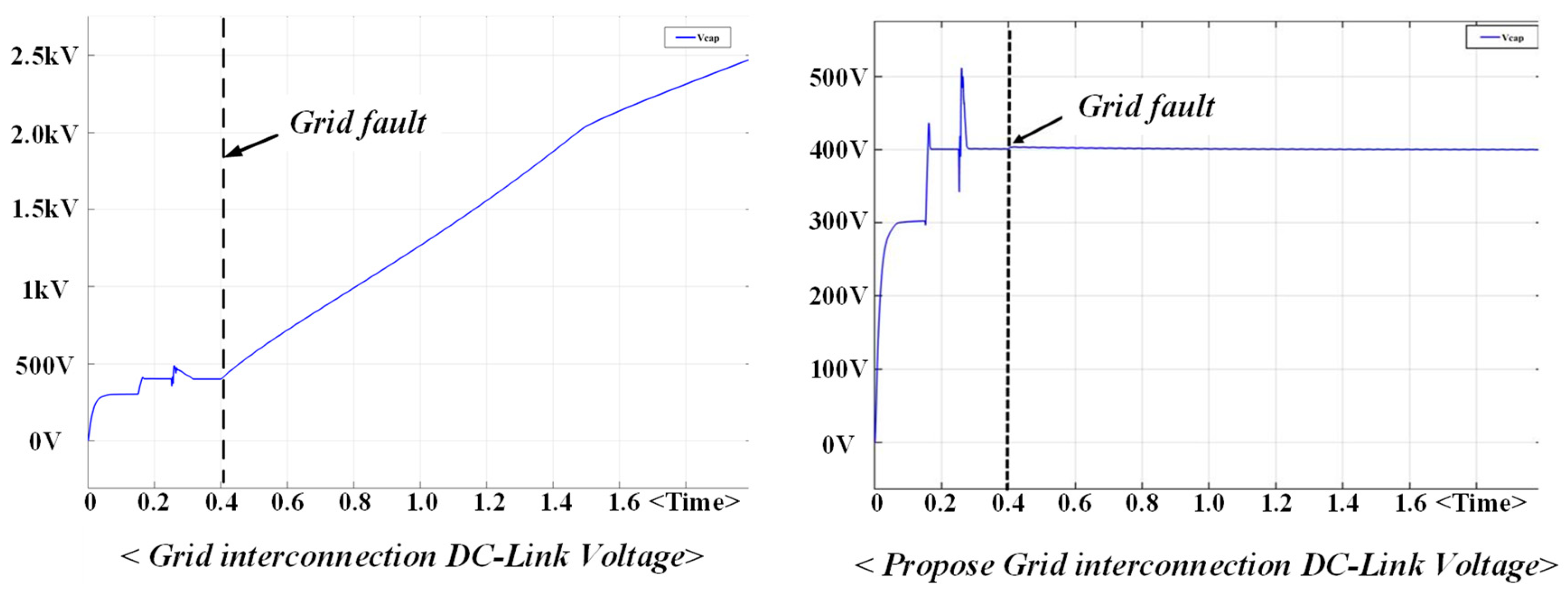
4.1. Verification of DC_Link Stabilization HILS of Grid-Connected Devices through Dynamic Grid Support
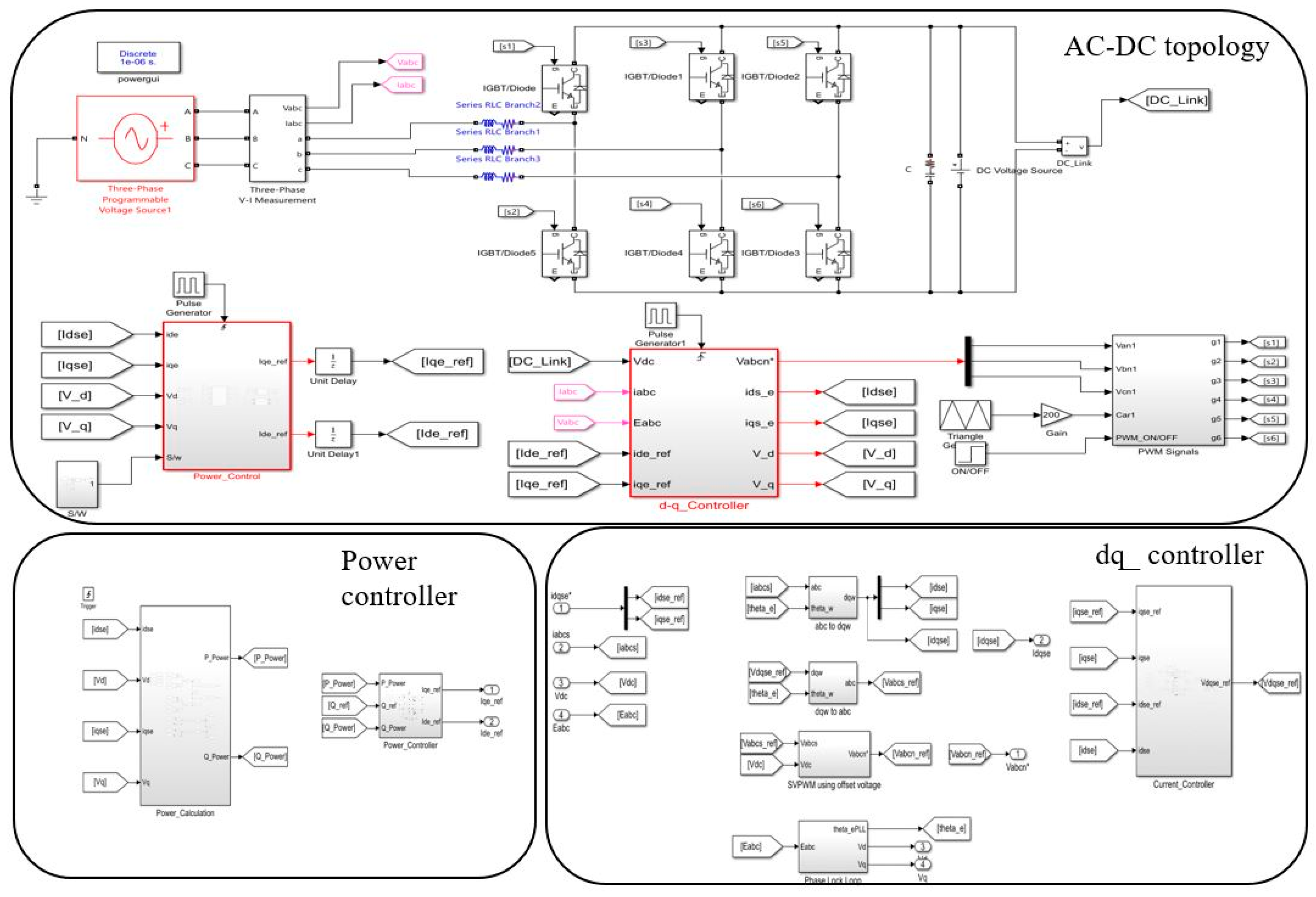
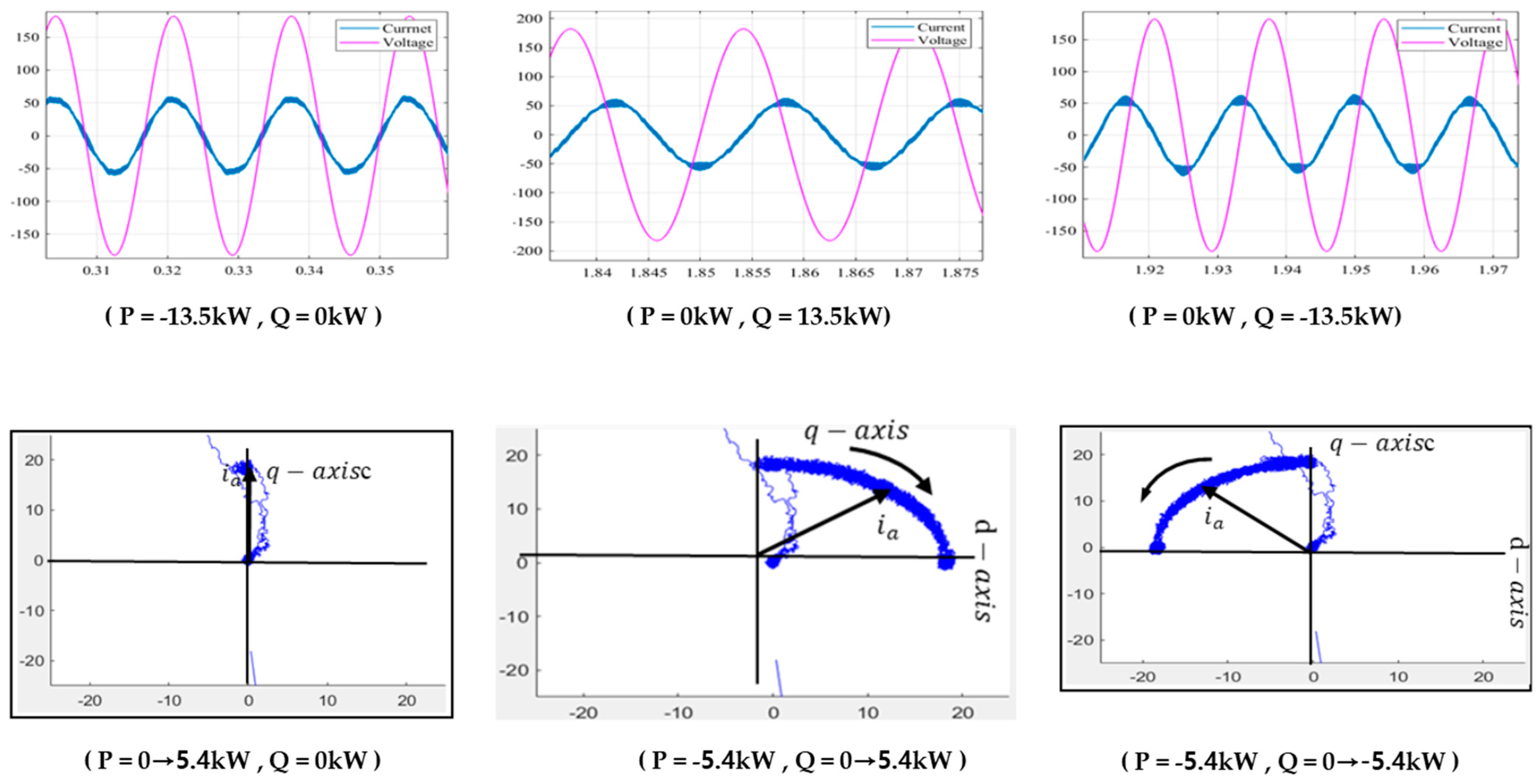
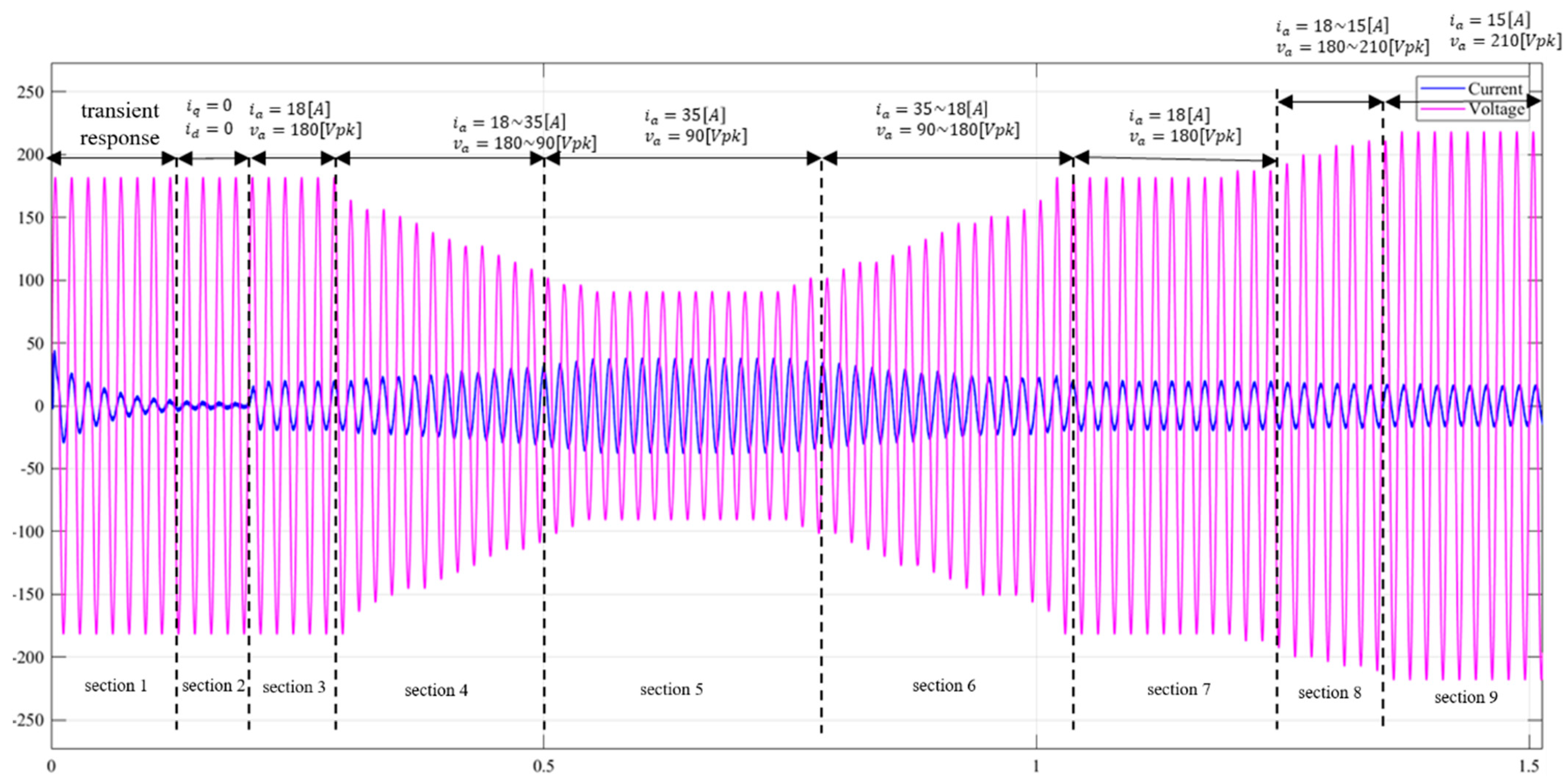
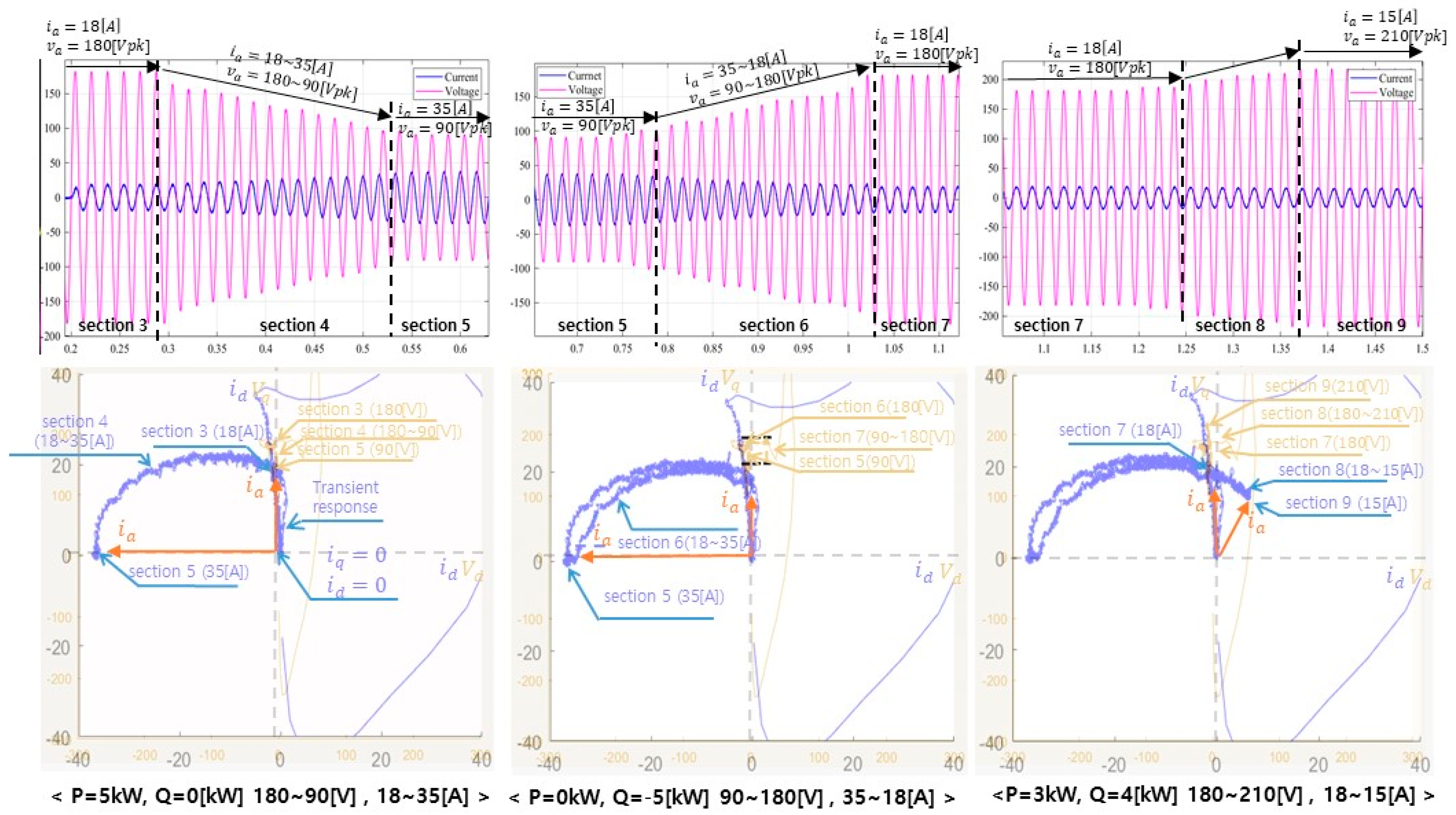
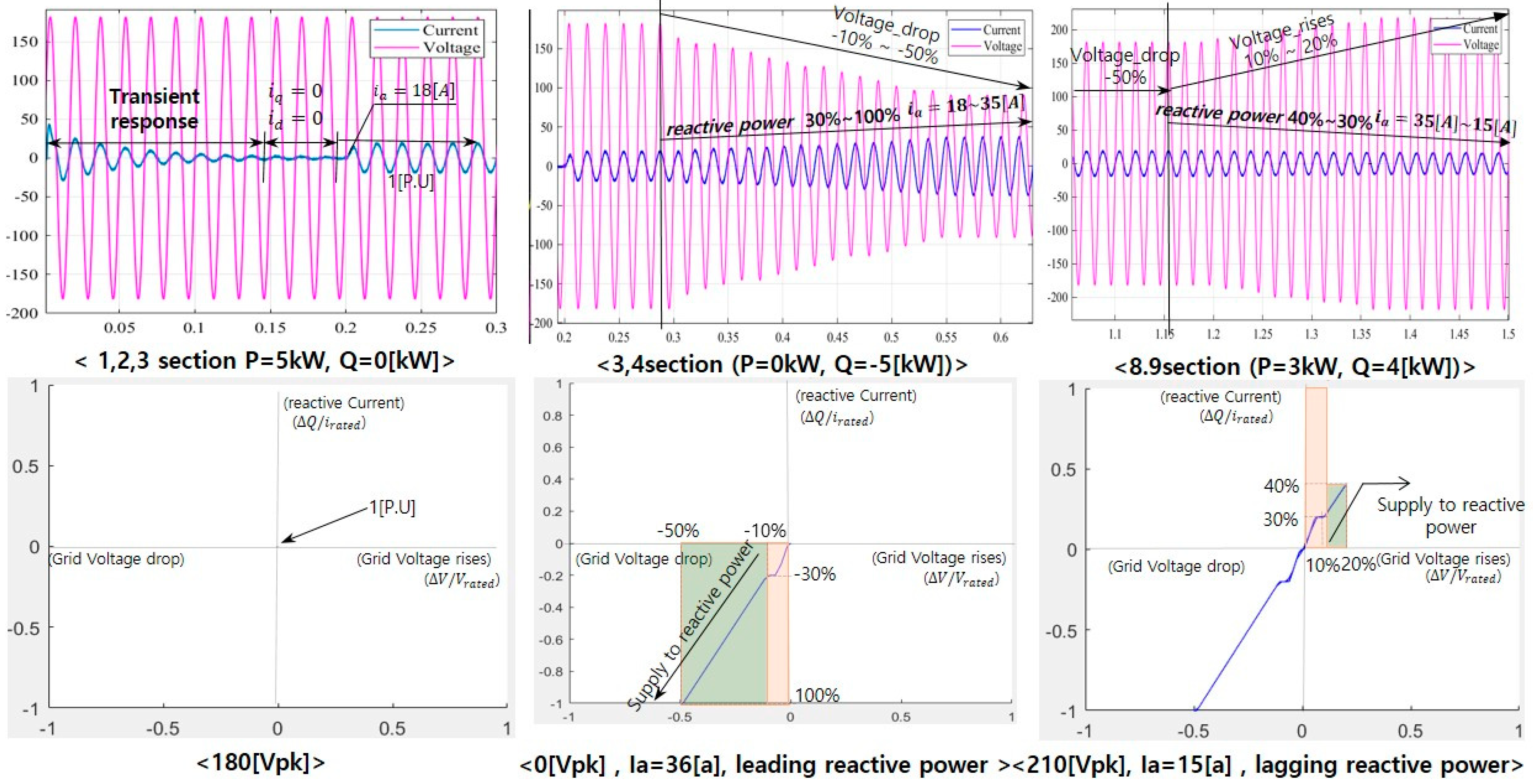
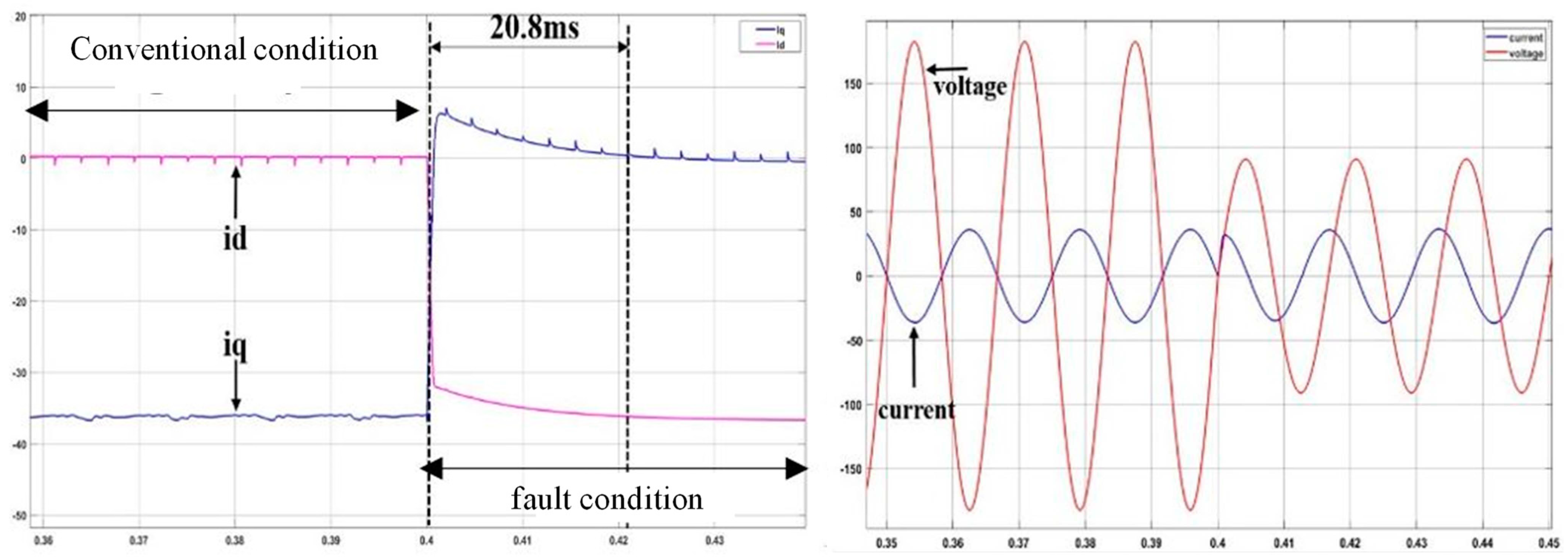
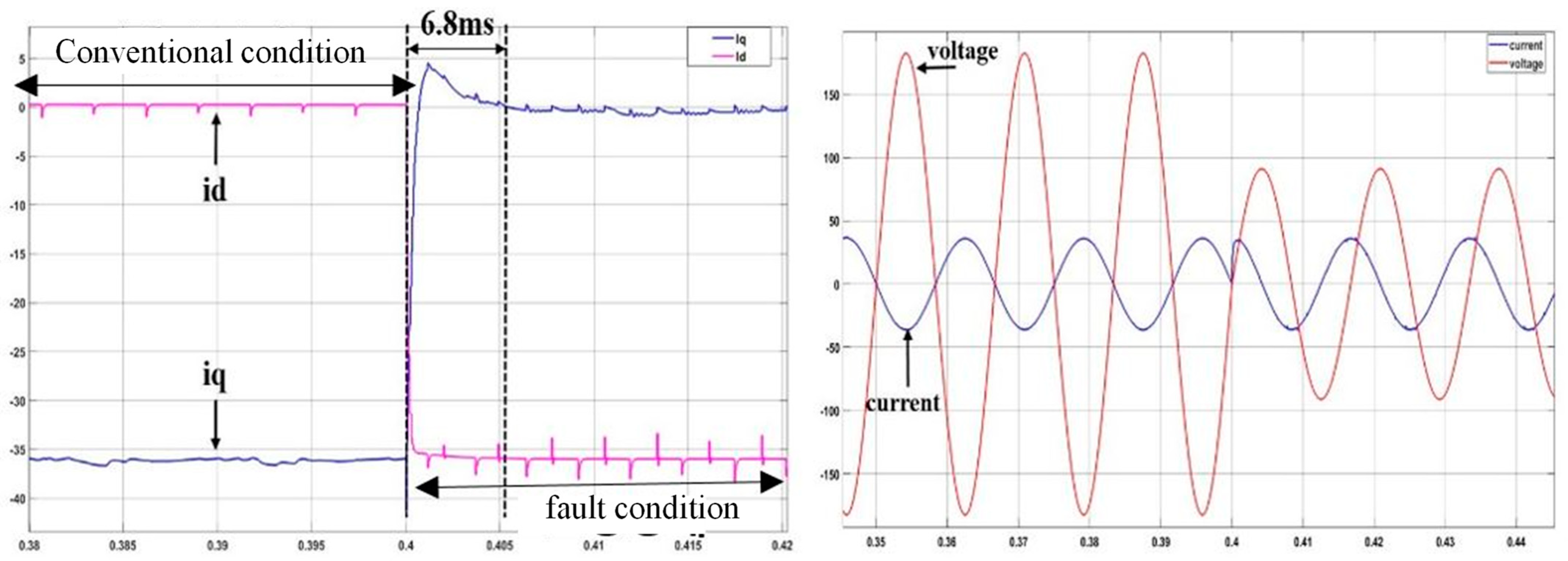
4.2. OPAL-RT Verification of Grid-Connected Devices Using Power Compensator during LVRT
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xuewei, S.; Xuefang, S.; Wenqi, D.; Peng, Z.; Jia, H.; Wu, J.; Wang, Y. Research on Energy Storage Configuration Method Based on Wind and Solar Volatility. In Proceedings of the 2020 10th Inter-national Conference on Power and Energy Systems (ICPES), Chengdu, China, 25–27 December 2020; pp. 464–468. [Google Scholar] [CrossRef]
- “Renewables 2019: Global Status Report (grs). 2019”. REN21. 2019. Available online: http://www.ren21.net8/. (accessed on 16 February 2022).
- De Paula Silva, R.; da Silveira, D.B.; de Barros, R.C.; Callegari, J.M.S.; Cupertino, A.F.; Pereira, H.A. Third-Harmonic Current Injection for Wear-out Reduction in Single-Phase PV Inverters. IEEE Trans. Energy Convers. 2021, 37, 120–131. [Google Scholar] [CrossRef]
- Jebaselvi, G.D.A.; Paramasivam, S. Analysis on renewable energy systems. Renew. Sustain. Energy Rev. 2013, 28, 625–634. [Google Scholar] [CrossRef]
- IEEE Std 1547–2018 (Revision of IEEE Std 1547–2003)-Redline; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces—Redline. IEEE: New York, NY, USA, 6 April 2018.
- Nakadomari, A.; Shigenobu, R.; Senjyu, T. Optimal Control and Placement of Step Voltage Regulator for Voltage Unbalance Improvement and Loss Minimization in Distribution System. In Proceedings of the 2020 IEEE Region 10 Conference (Tencon), Osaka, Japan, 16–19 November 2020; pp. 1013–1018. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhende, C.N.; Samanta, A.K. Adaptive virtual inertia-based frequency regulation in wind power systems. Renew. Energy 2018, 115, 558–574. [Google Scholar] [CrossRef]
- Causebrook, A.; Atkinson, D.J.; Jack, A.G. Fault Ride-Through of Large Wind Farms Using Series Dynamic Braking Resistors. IEEE Trans. Power Syst. 2007, 22, 966–975. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Rossi, C.; Casadei, D.; Tani, A. Improved control strategy of wind turbine with DFIG for Low Voltage Ride Through capability. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 19–24. [Google Scholar]
- Shin, H.; Jung, H.; Sul, S. Low Voltage Ride Through(LVRT) control strategy of grid-connected variable speed Wind Turbine Generator System. In Proceedings of the 8th International Conference on Power Electronics-ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 96–101. [Google Scholar] [CrossRef]
- Bae, Y.; Vu, T.; Kim, R. Implemental Control Strategy for Grid Stabilization of Grid-Connected PV System Based on German Grid Code in Symmetrical Low-to-Medium Voltage Network. IEEE Trans. Energy Convers. 2013, 28, 619–631. [Google Scholar] [CrossRef]
- Safayet, A.; Fajri, P.; Husain, I. Reactive Power Management for Overvoltage Prevention at High PV Penetration in a Low-Voltage Distribution System. IEEE Trans. Ind. Appl. 2017, 53, 5786–5794. [Google Scholar] [CrossRef]
- Jiancheng, T.; Haili, G.; Guangzong, C. LVRT control strategy of VSC-HVDC connected large PV plant. In Proceedings of the 2017 China International Electrical and Energy Conference (CIEEC), Beijing, China, 25–27 October 2017; pp. 504–509. [Google Scholar] [CrossRef]
- E. ON NETZ GmbH. Grid Code for High and Extra High Voltage; E.ON Netz: Essen, Germany, 2006. [Google Scholar]
- Batreuth, G.H. Requirements for Offshore Grid Connections in the E.ON Netz Network; E.ON Netz: Essen, Germany, 2008. [Google Scholar]
- Transmission Code 2007-Network and System Rules of the German Transmission System Operators; Verband der Netzbetreiber VDN e.V.beim VDEW: Berlin, Germany, 2007.
- Yang, Y.; Blaabjerg, F. Low-voltage ride-through capability of a single-stage single-phase photovoltaic system connected to the low-voltage grid. Int. J. Photoenergy 2013, 2013, 257487. [Google Scholar] [CrossRef] [Green Version]
- Noureldeen, O.; Youssef, M.M.M. Super-capacitor utilization for low- voltage ride through improvement of grid-tied wind turbines. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON) in Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1305–1309. [Google Scholar]
- Anwar, A.; Ali, M.H.; Dougal, R.A. Supercapacitor energy storage for low-voltage ride through in a 13.8 KV AC system. In Proceedings of the IEEE SoutheastCon 2010 (SoutheastCon), Concord, NC, USA, 18–21 March 2010; pp. 189–192. [Google Scholar]
- Patil, S.B.; Pawar, A.S. Stability Analysis of Supercapacitor based DC Microgrid System with Energy Storage. In Proceedings of the 2020 IEEE International Conference for Innovation in Technology (INOCON), Bangluru, India, 6–8 November 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Ryu, H.-Y.; Kim, J.A.; Sul, S.E. Analysis of multiphase space vector pulse-width modulation based on multiple d-q spaces concept. IEEE Trans. Power Electron. 2005, 20, 1364–1371. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Grid Voltage | 380 | Vac |
| Grid Frequency | 60 | Hz |
| Apparent Power | 5 | kva |
| Output Filter | 1 | mH |
| DC_link_Cap | 4700 | μF |
| DC_link Voltage | 400 | Vdc |
| Switching Frequency | 10 | kHz |
| Mode Selection | Power Command | Charging Control Mode Charging Current | Charging Control Mode Charging Voltage |
|---|---|---|---|
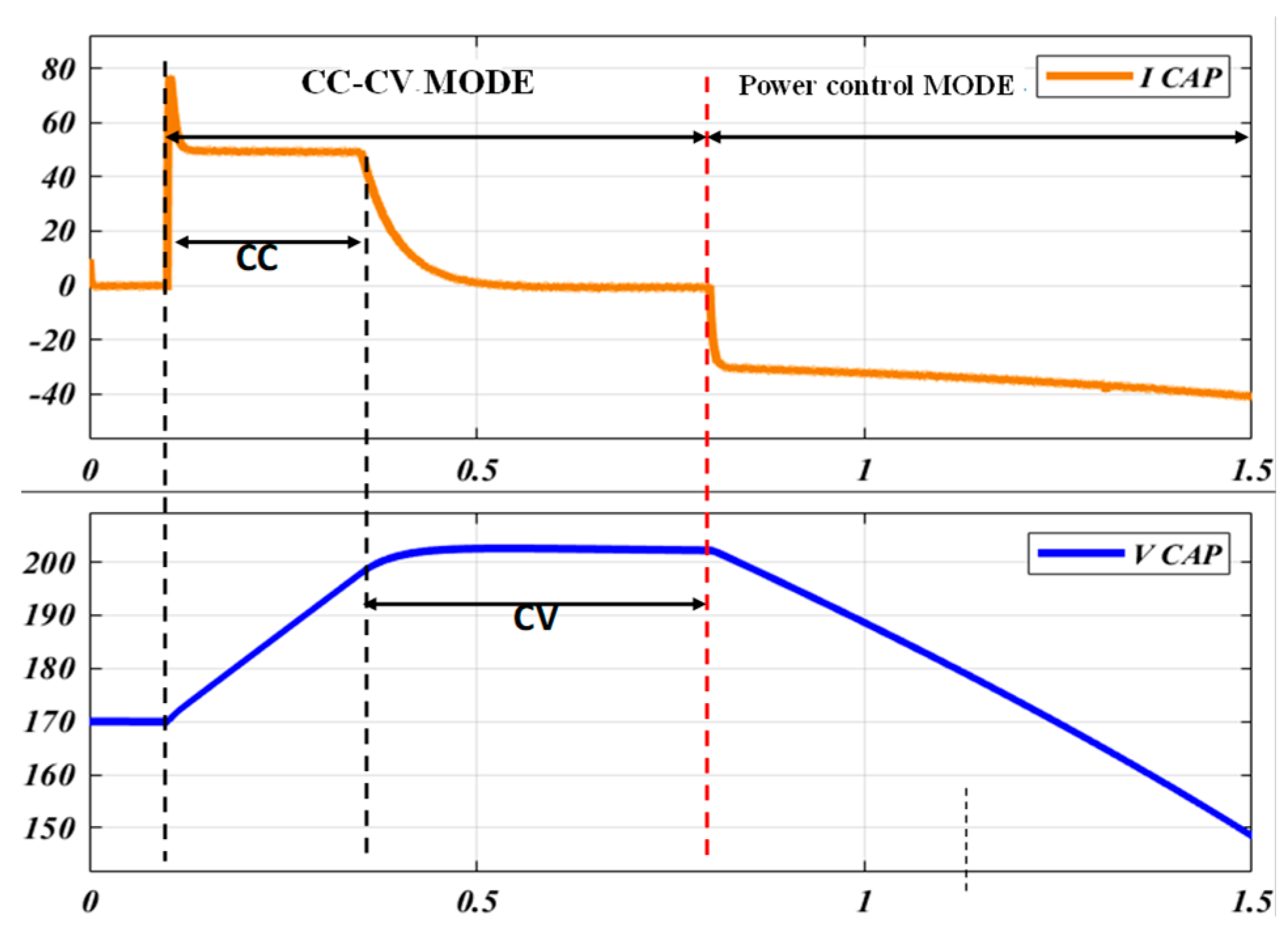
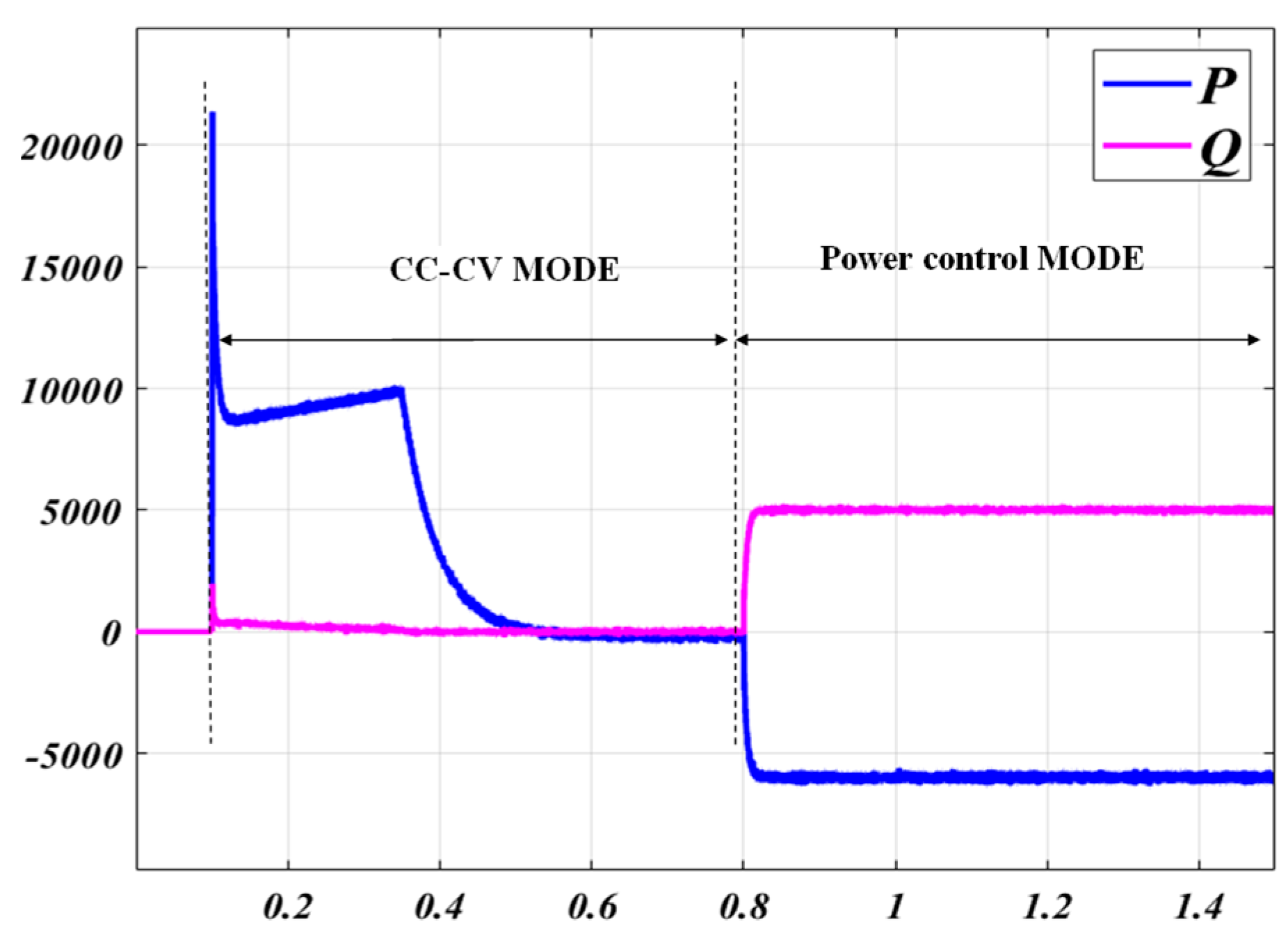
| Power control mode 0.8~1.5 s | Active power −6 kW | 50 A | 200 V |
| Charging control mode 0.1~0.8 s | Reactive power 2 kVar |
| Parameter | Value | Unit |
|---|---|---|
| Grid Voltage | 220 | Vrms |
| Grid Frequency | 60 | Hz |
| Control Period | 50 | μs |
| Apparent Power | 5 | kva |
| Supercapacitor | 10 | mF |
| Grid Connected 3 ph. Reactor | 5 | mH |
| DC/DC Converter Reactor | 2 | mH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.-n.; Yi, J.-s.; Won, C.-Y.; Lee, J.-H. Methods to Improve Dynamic System Response of Power Compensators Using Supercapacitors in Low-Voltage Ride-Through (LVRT) Conditions. Electronics 2022, 11, 1144. https://doi.org/10.3390/electronics11071144
Kim M-n, Yi J-s, Won C-Y, Lee J-H. Methods to Improve Dynamic System Response of Power Compensators Using Supercapacitors in Low-Voltage Ride-Through (LVRT) Conditions. Electronics. 2022; 11(7):1144. https://doi.org/10.3390/electronics11071144
Chicago/Turabian StyleKim, Mi-na, Jun-sin Yi, Chung-Yuen Won, and Jung-Hyo Lee. 2022. "Methods to Improve Dynamic System Response of Power Compensators Using Supercapacitors in Low-Voltage Ride-Through (LVRT) Conditions" Electronics 11, no. 7: 1144. https://doi.org/10.3390/electronics11071144