
Analysis and Optimization Based on Factors Affecting the Spiral Climbing Locomotion of Snake-like Robot
Abstract
:1. Introduction
2. Analysis of Locomotion Patterns
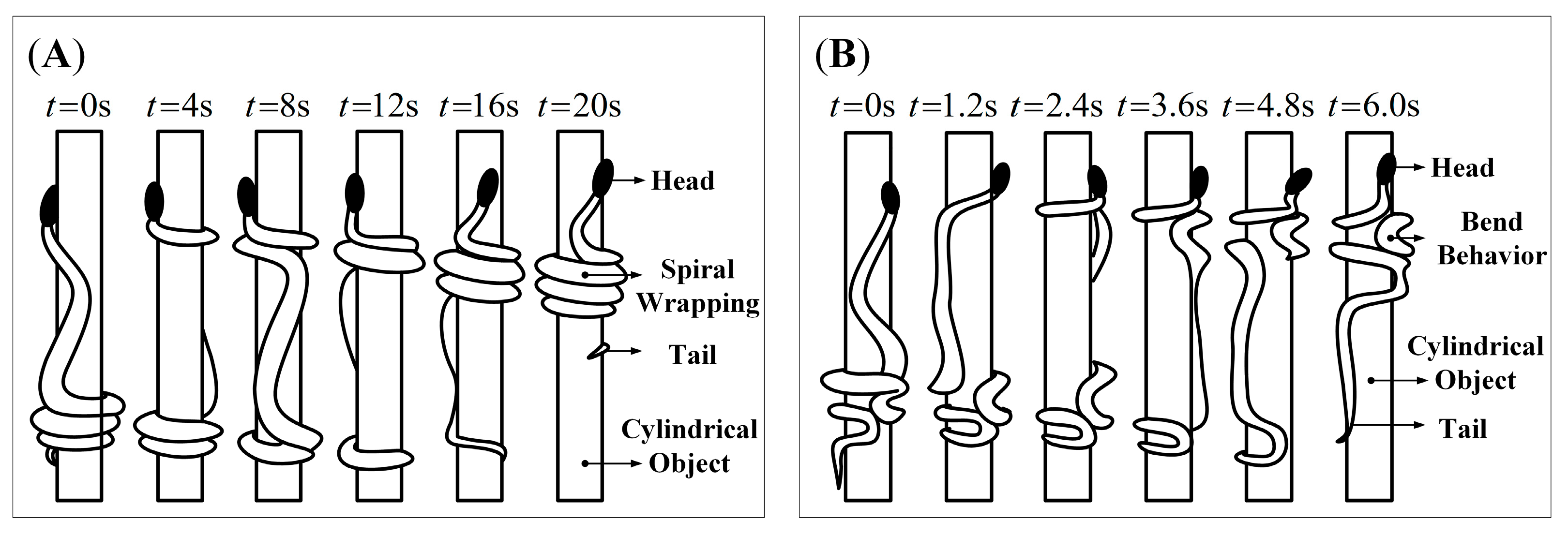
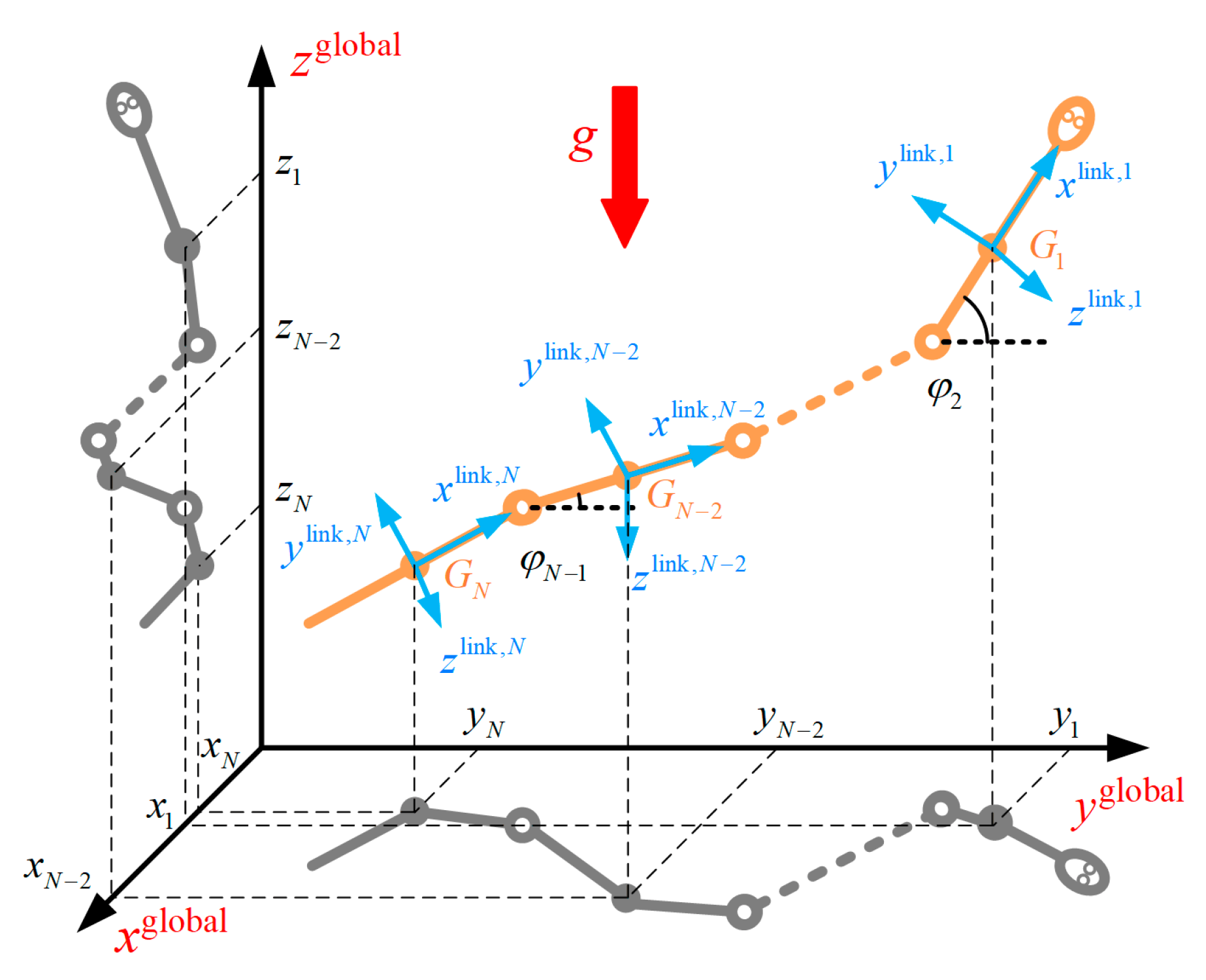
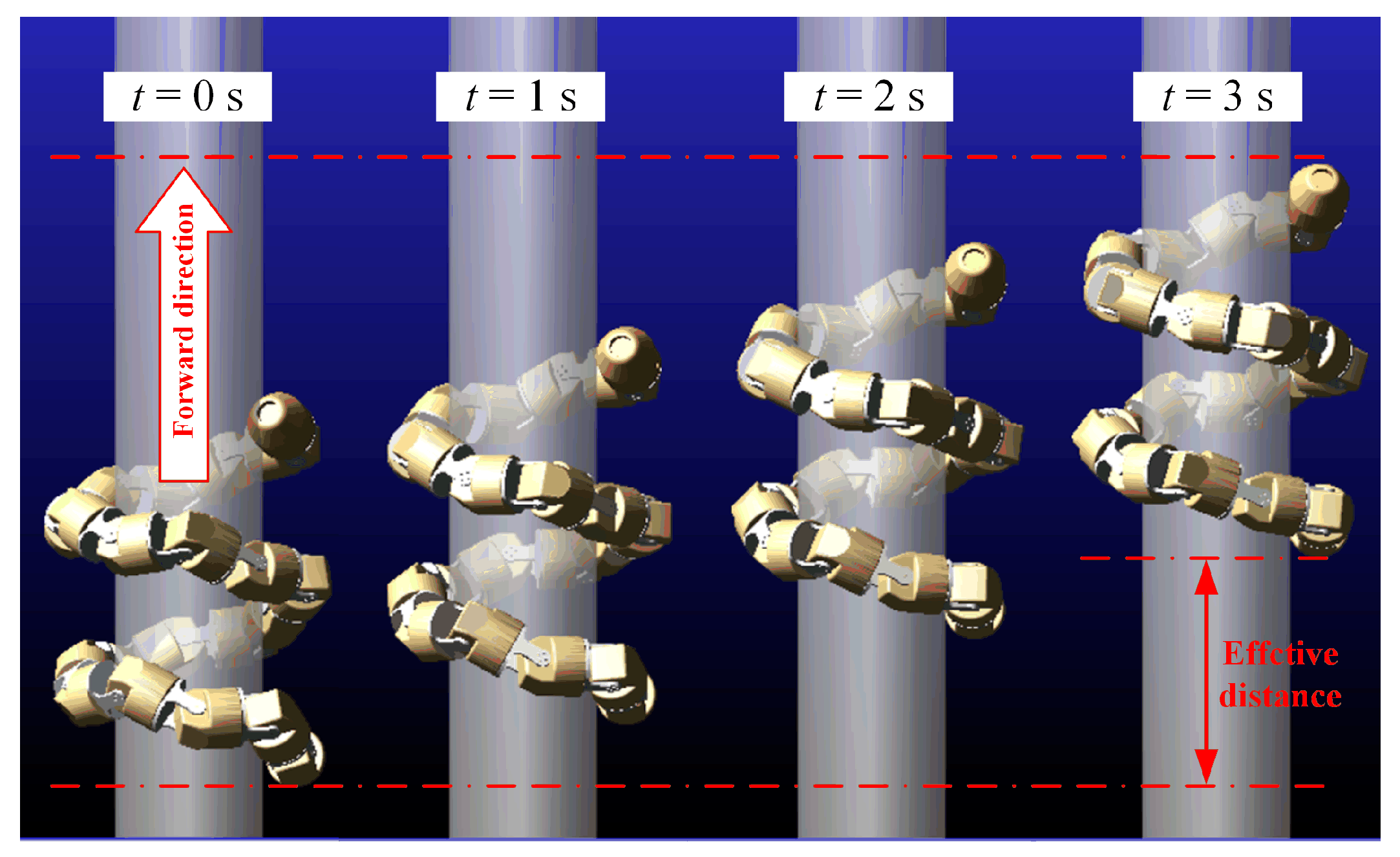
2.1. Method for Locomotion
2.2. Control of Spiral Climbing Locomotion
2.3. Influencing Factors
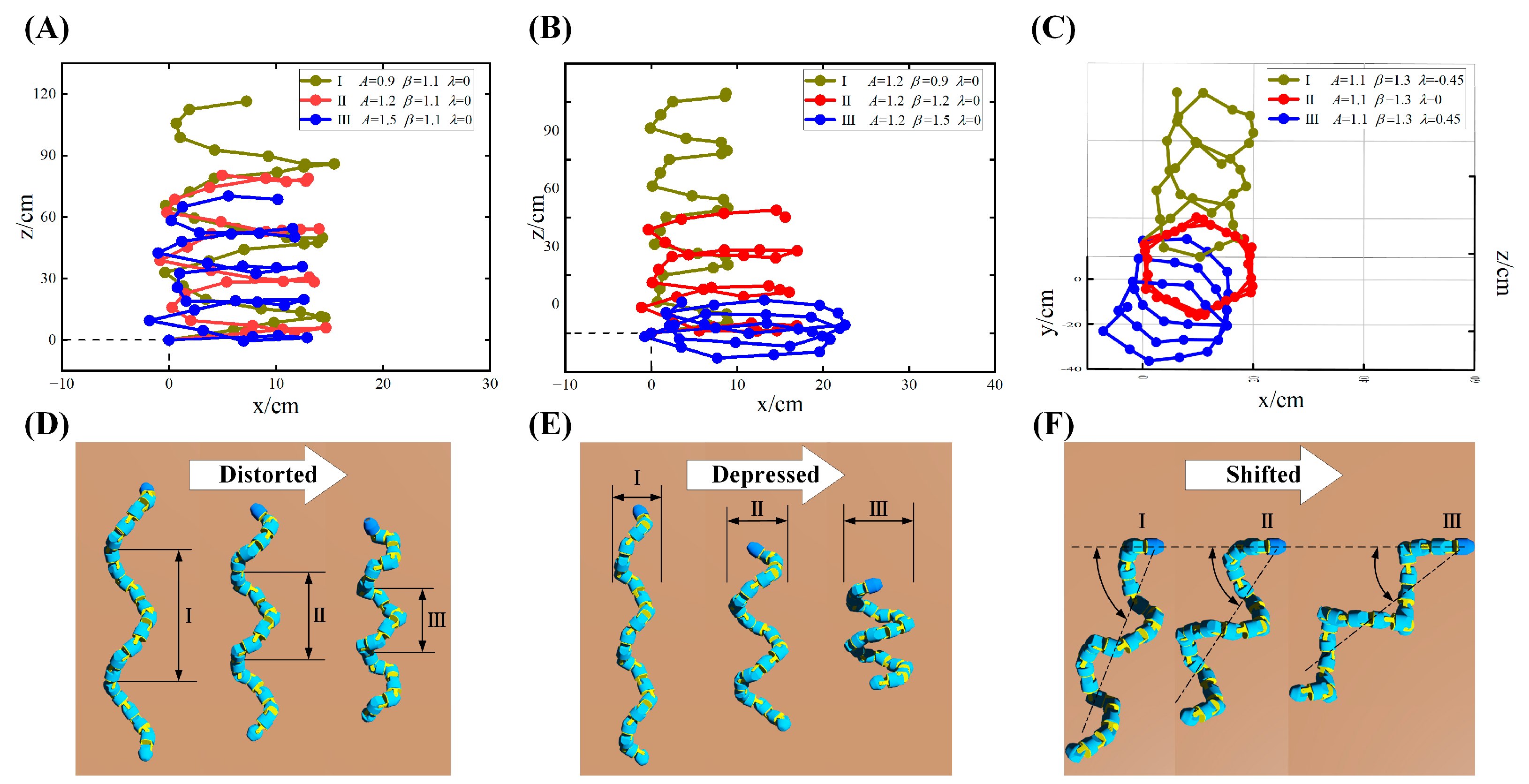
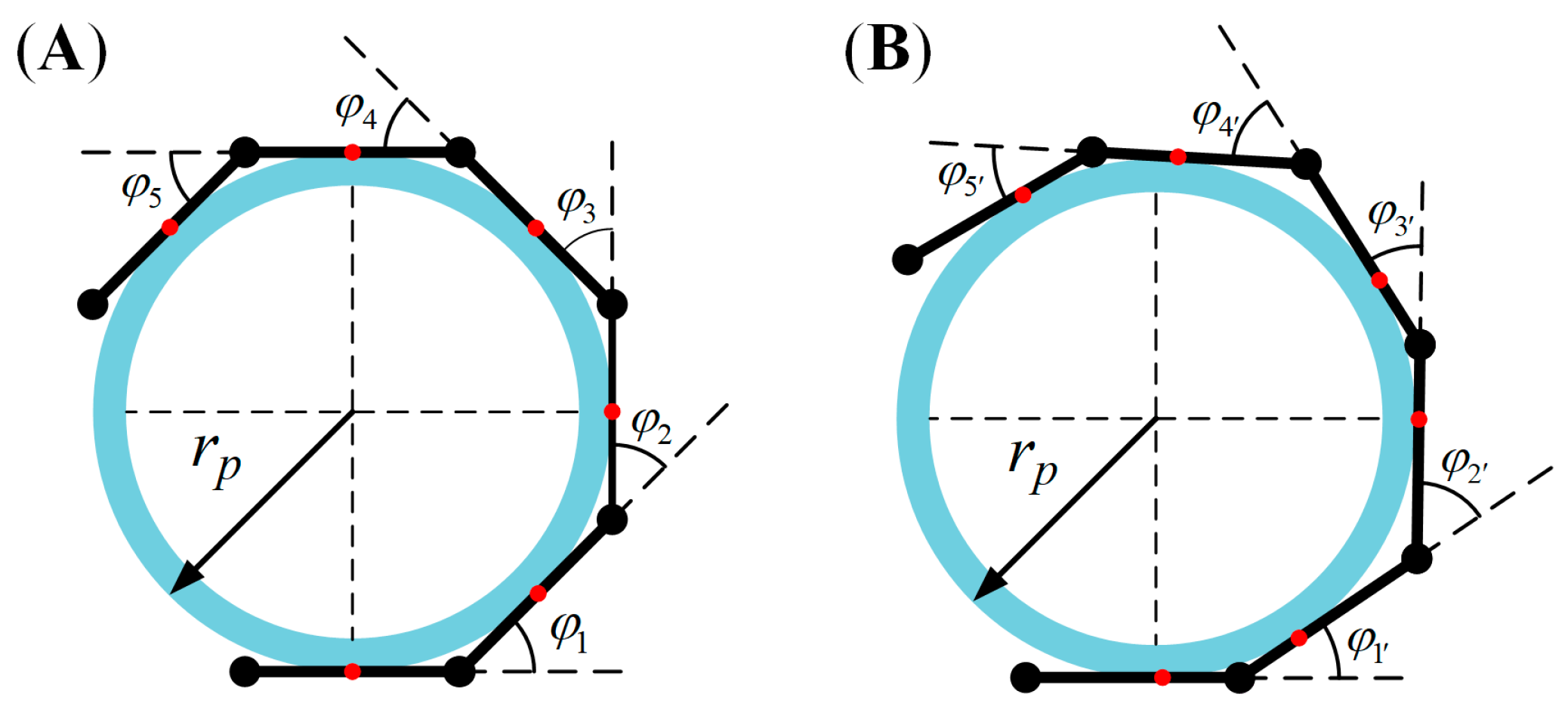
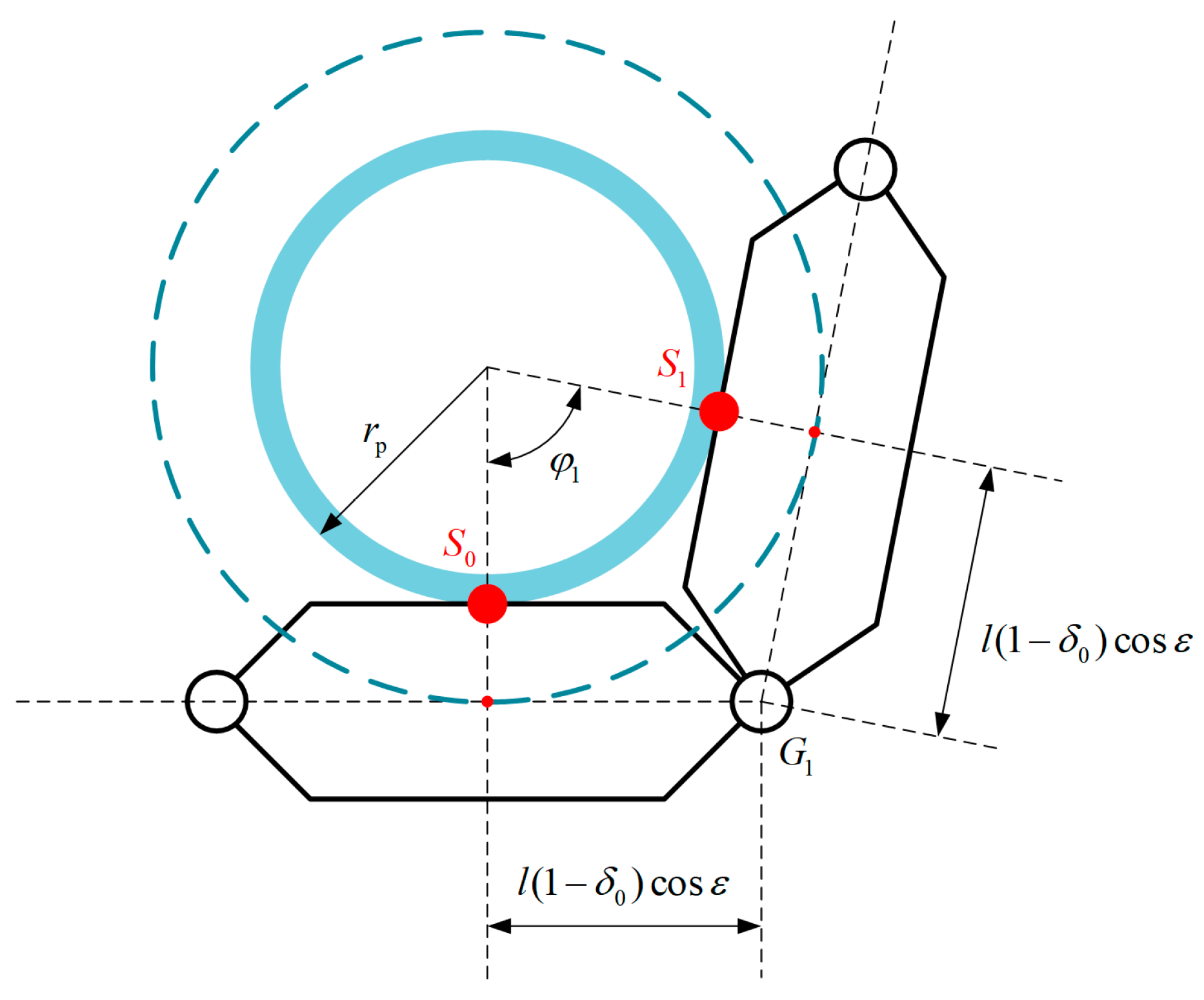
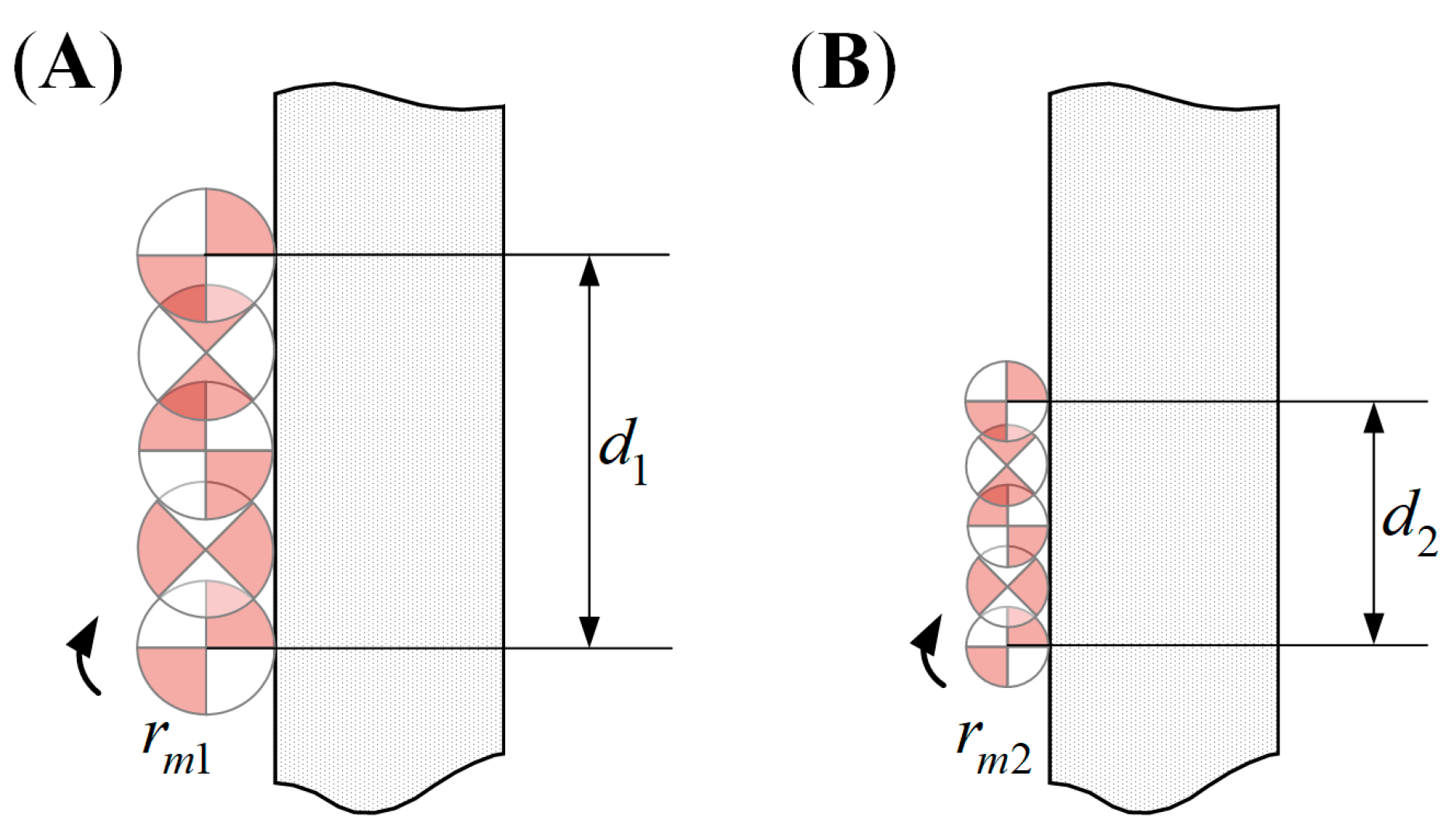
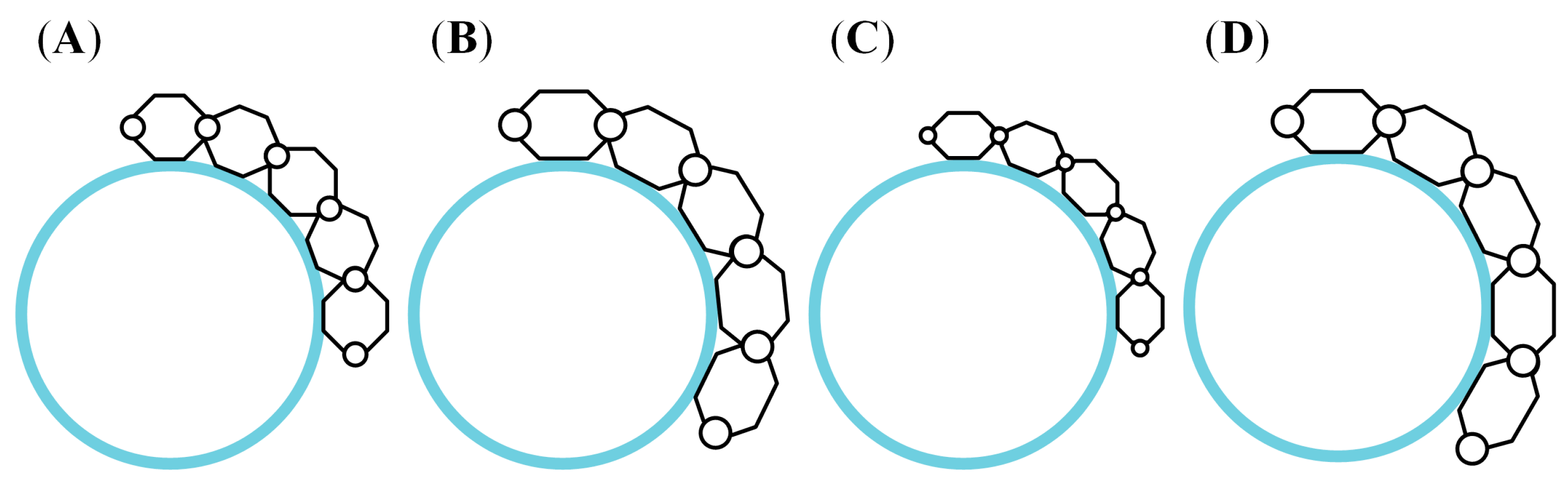
2.3.1. Radius of Spiral Climbing Gaits
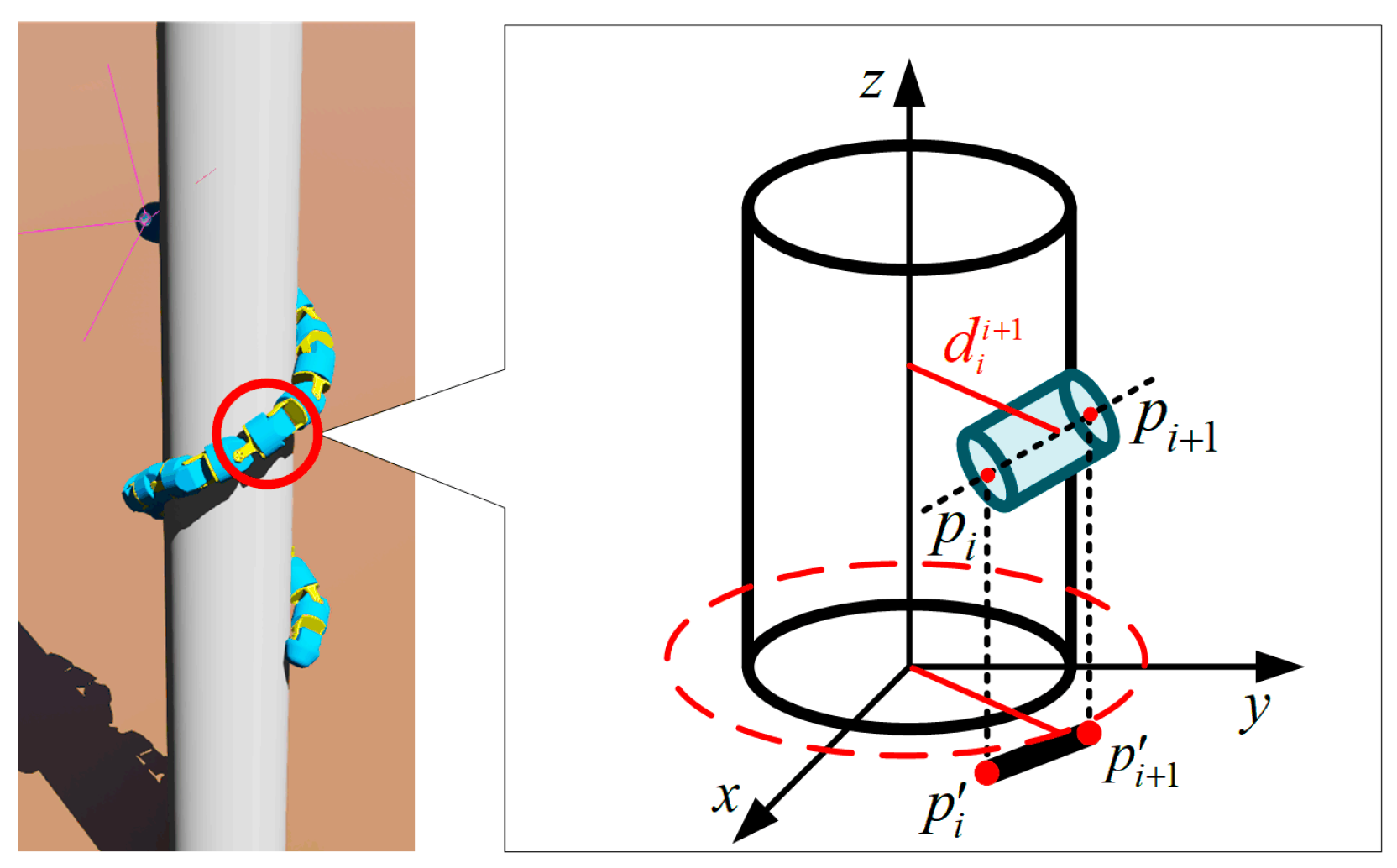
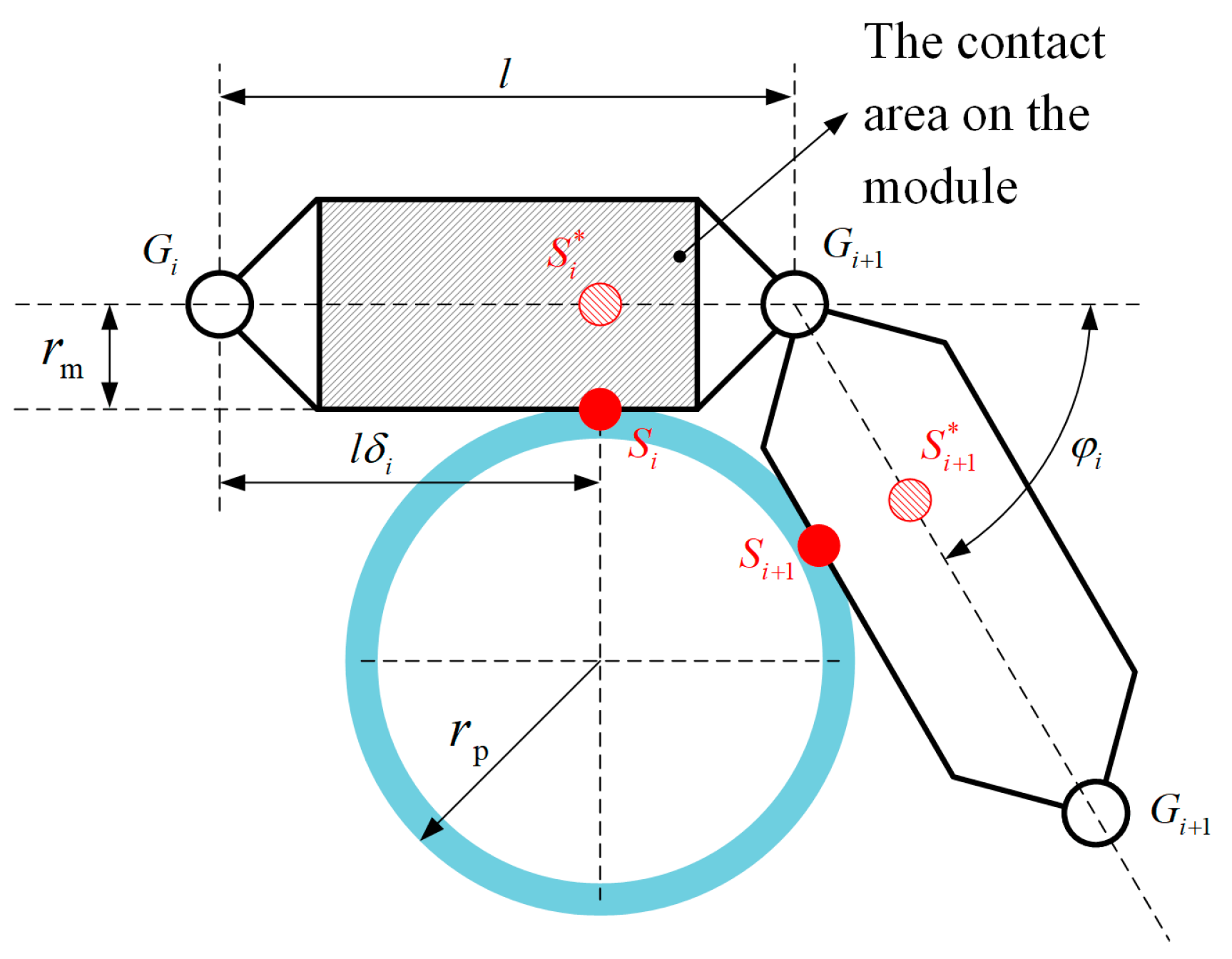
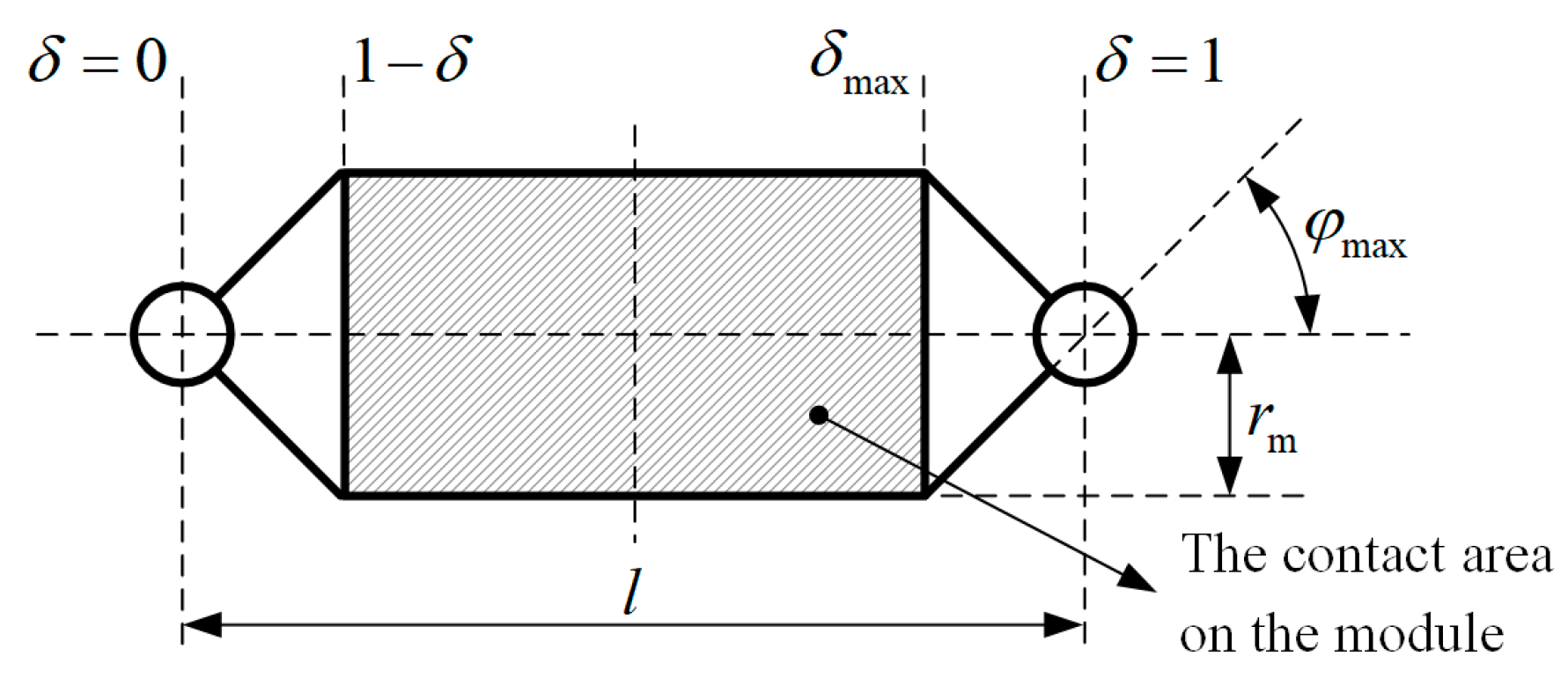
2.3.2. Contact Point
3. Analysis of Optimization
3.1. Cost Function Based on Factors
3.1.1. The Number of Joint Modules
3.1.2. The Forward Velocity of Spiral Climbing
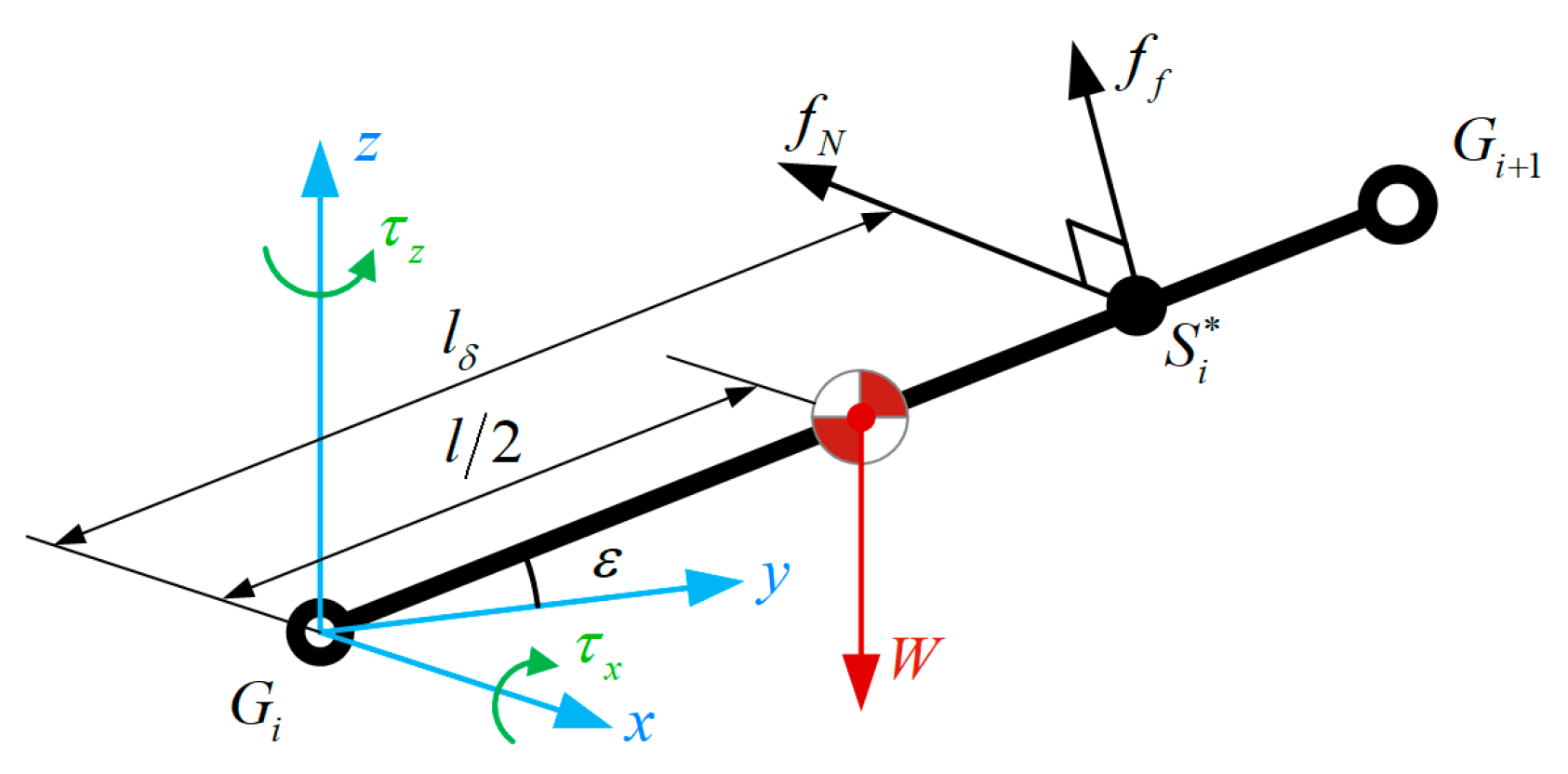
3.1.3. The Output Torque of Joints
3.2. Optimization Design
4. Simulation
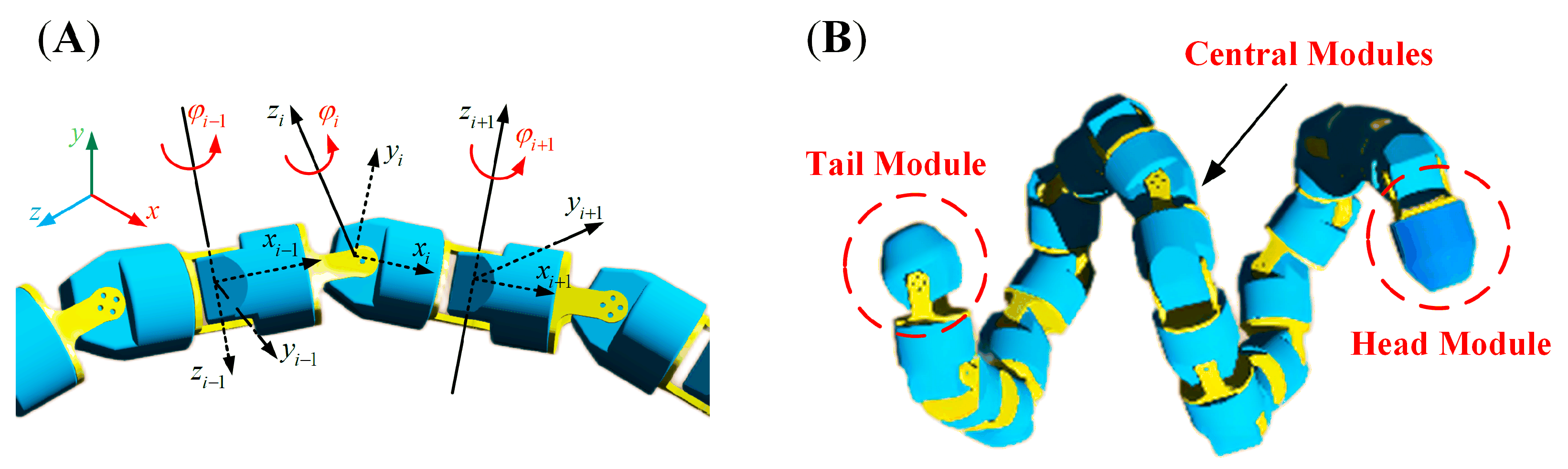
4.1. Modeling of the Snake-like Robot
4.2. Simulations and Results
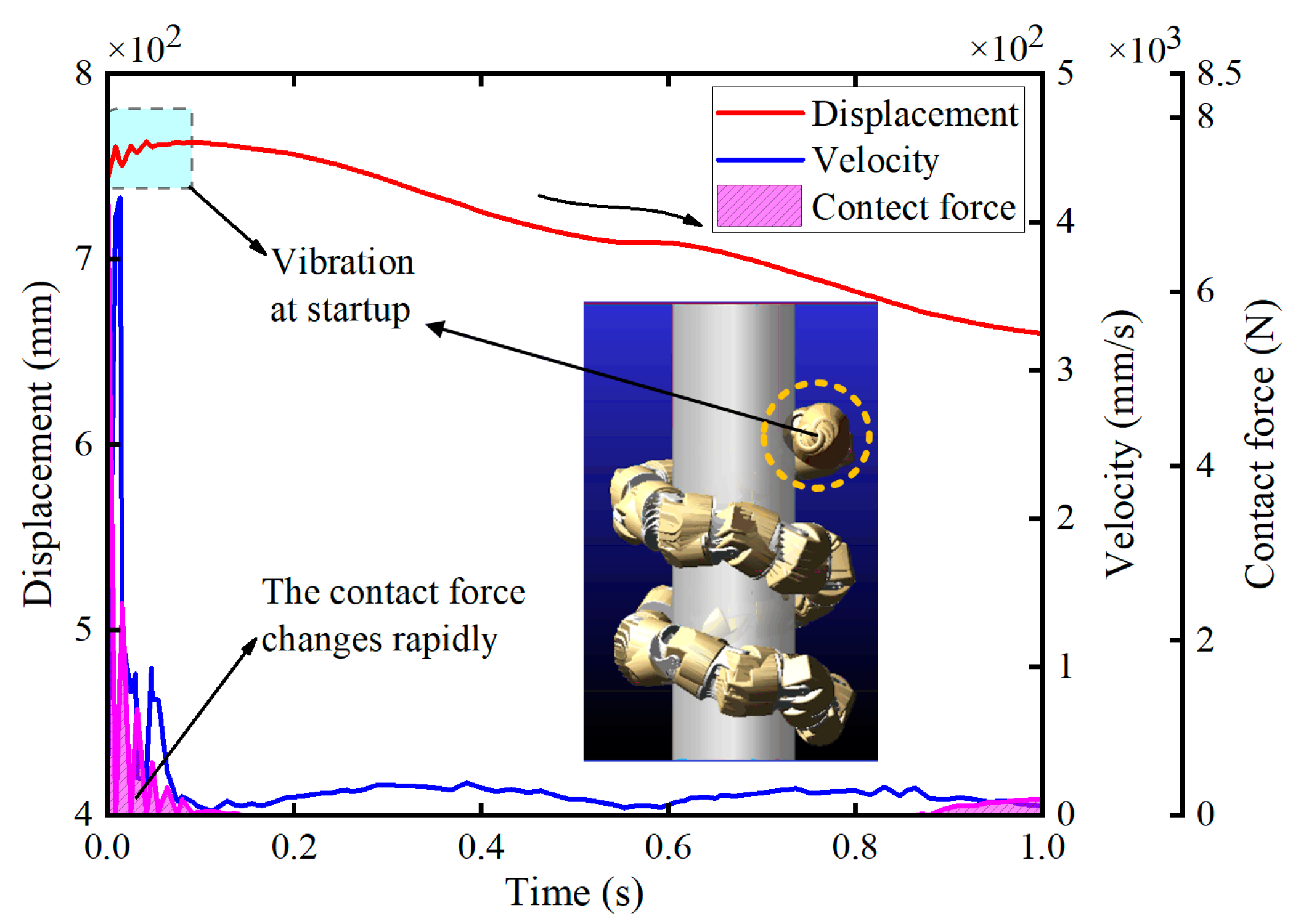
4.2.1. Vibration at Startup
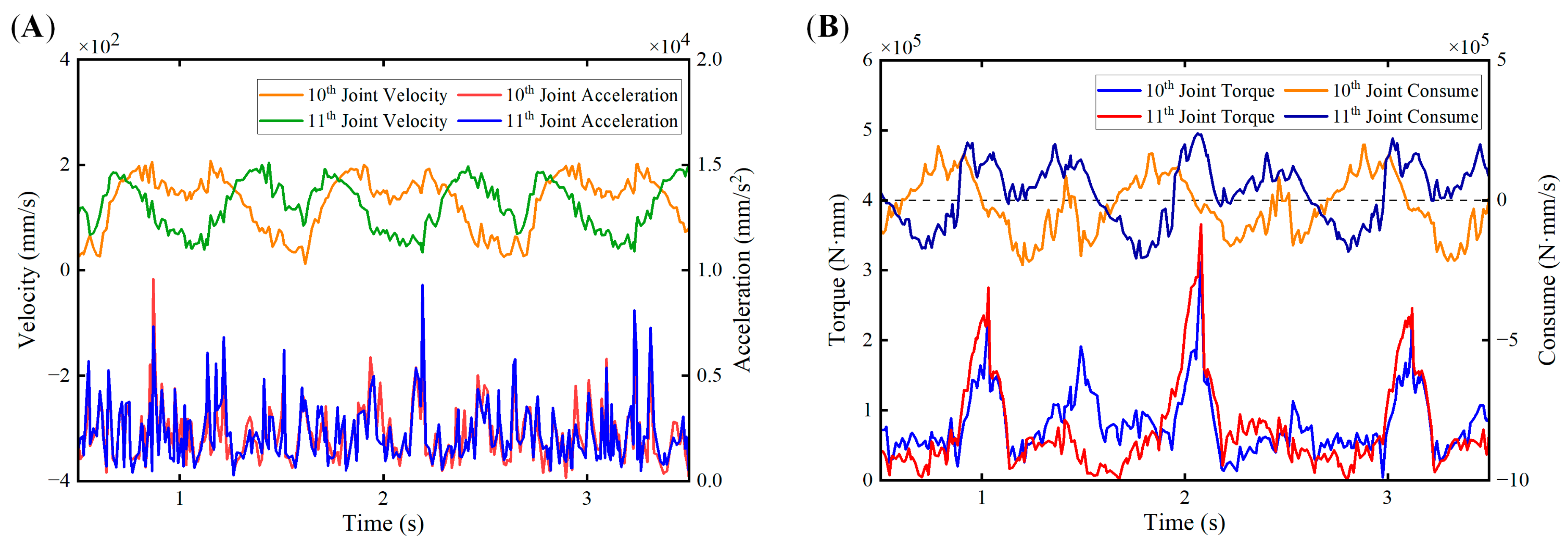
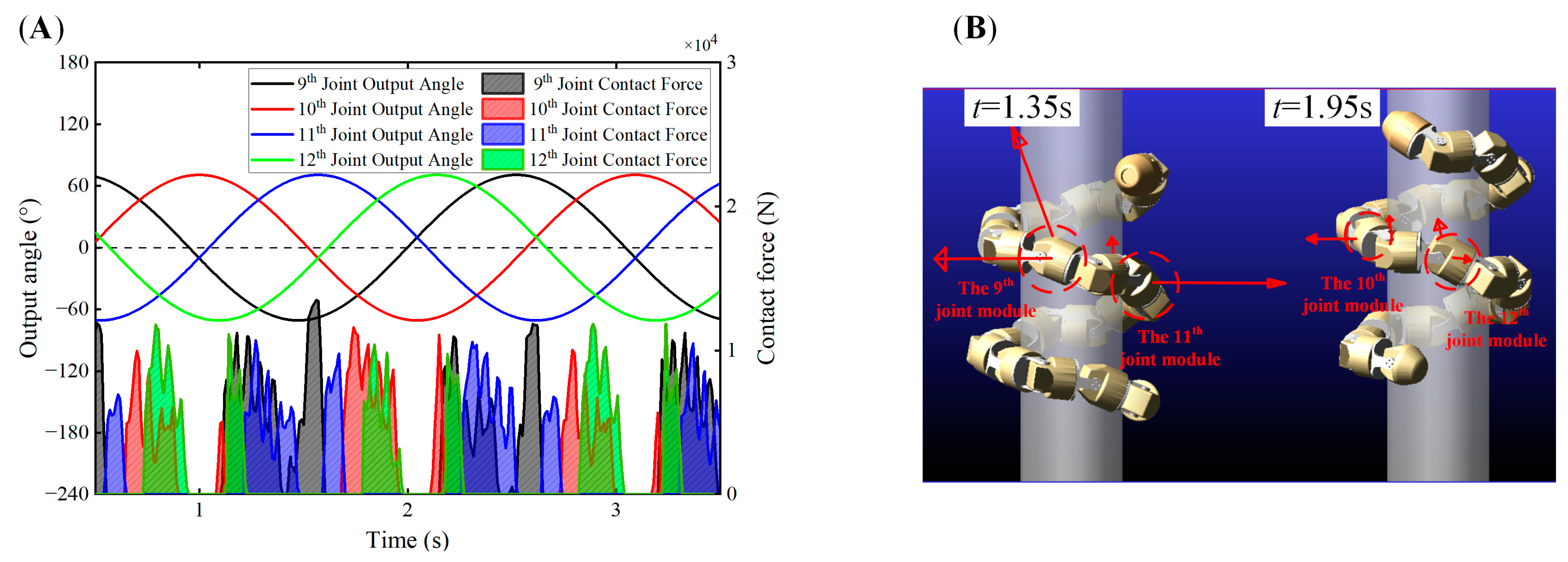
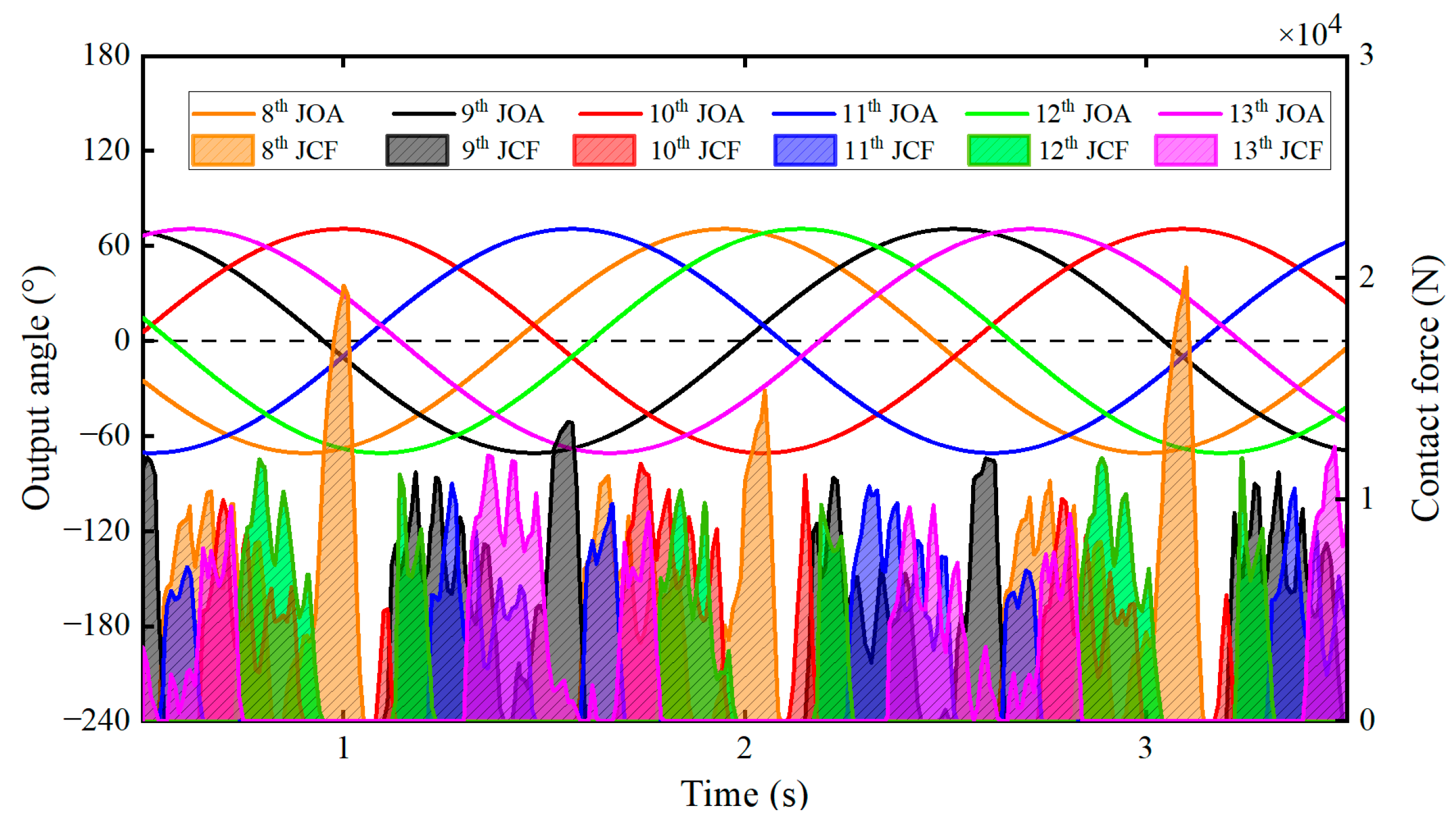
4.2.2. Periodic Variation
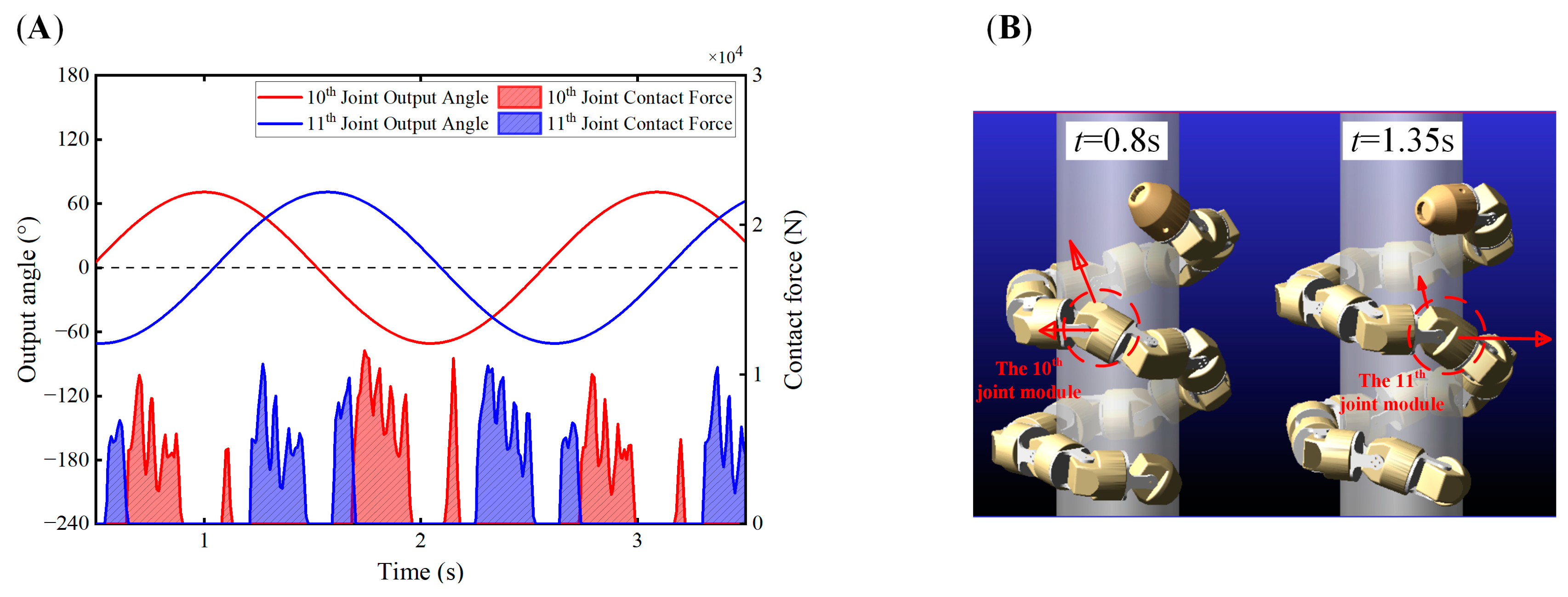
4.2.3. Contact Force
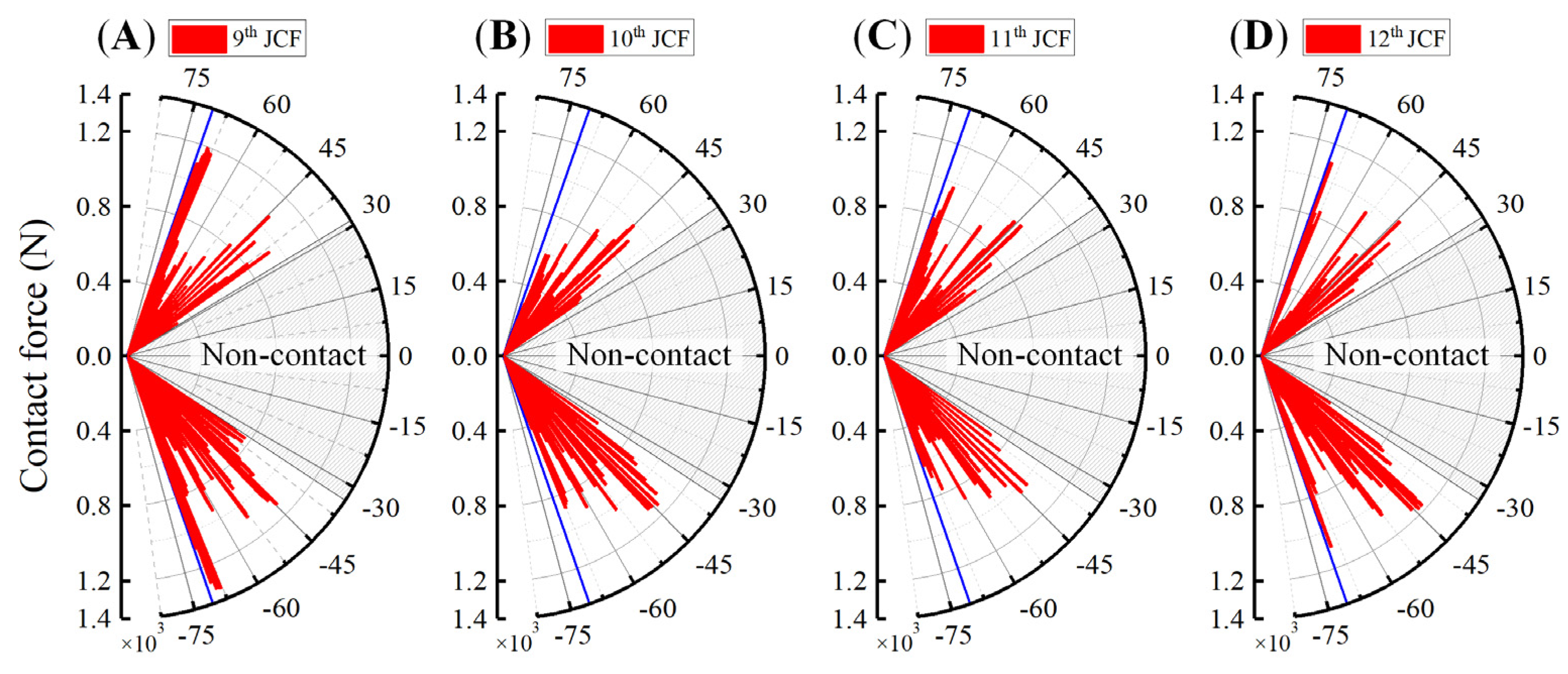
4.2.4. Non-Contact Zone
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Seetohul, J.; Shafiee, M. Snake Robots for Surgical Applications: A Review. Robotics 2022, 11, 57. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhou, T.; Du, J. Upper-Body Haptic System for Snake Robot Teleoperation in Pipelines. Adv. Eng. Inform. 2022, 51, 101532. [Google Scholar] [CrossRef]
- Li, C.; Zhang, T.; Goldman, D.I. A Terradynamics of Legged Locomotion on Granular Media. Science 2013, 339, 1408–1412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rummel, J.D.; Beaty, D.W.; Jones, M.A.; Bakermans, C.; Barlow, N.G.; Boston, P.J.; Chevrier, V.F.; Clark, B.C.; de Vera, J.-P.P.; Gough, R.V.; et al. A New Analysis of Mars “Special Regions”: Findings of the Second MEPAG Special Regions Science Analysis Group (SR-SAG2). Astrobiology 2014, 14, 887–968. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Astley, H.C. Slithering across Worlds—Snake-Inspired Robots for Extraterrestrial Exploration. In Biomimicry for Aerospace; Elsevier: Amsterdam, The Netherlands, 2022; pp. 261–289. ISBN 978-0-12-821074-1. [Google Scholar]
- Hou, X.; Shi, Y.; Li, L.; Tian, Y.; Su, Y.; Ding, T.; Deng, Z. Revealing the Mechanical Characteristics via Kinematic Wave Model for Snake-Like Robot Executing Exploration of Lunar Craters. IEEE Access 2020, 8, 38368–38379. [Google Scholar] [CrossRef]
- Jayne, B.C. What Defines Different Modes of Snake Locomotion? Integr. Comp. Biol. 2020, 60, 156–170. [Google Scholar] [CrossRef] [PubMed]
- Hatton, R.L.; Choset, H. Sidewinding on Slopes. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, 3–7 May 2010; pp. 691–696. [Google Scholar]
- Gong, C.; Hatton, R.L.; Choset, H. Conical Sidewinding. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 4222–4227. [Google Scholar]
- Qi, W.; Kamegawa, T.; Gofuku, A. Proposal of Helical Wave Propagate Motion for a Snake Robot to across a Branch on a Pipe. In Proceedings of the 2016 IEEE/SICE International Symposium on System Integration (SII), Sapporo, Japan, 13–15 December 2016; pp. 821–826. [Google Scholar]
- Yaqub, S.; Ali, A.; Usman, M.; Zuhaib, K.M.; Khan, A.M.; An, B.; Moon, H.; Lee, J.-Y.; Han, C. A Spiral Curve Gait Design for a Modular Snake Robot Moving on a Pipe. Int. J. Control Autom. Syst. 2019, 17, 2565–2573. [Google Scholar] [CrossRef]
- Rollinson, D.; Choset, H. Virtual Chassis for Snake Robots. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 221–226. [Google Scholar]
- Zhou, Y.; Zhang, Y.; Ni, F.; Liu, H. A Spring-like Pipe Climbing Gait for the Snake Robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, Macao, 5–8 December 2017; pp. 1886–1891. [Google Scholar]
- Yamada, H.; Hirose, S. Approximations to Continuous Curves of Active Cord Mechanism Made of Arc-Shaped Joints or Double Joints. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 703–708. [Google Scholar]
- Jayne, B.C.; Newman, S.J.; Zentkovich, M.M.; Berns, H.M. Why Arboreal Snakes Should Not Be Cylindrical: Body Shape, Incline and Surface Roughness Have Interactive Effects on Locomotion. J. Exp. Biol. 2015, 218, 3978–3986. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Byrnes, G.; Jayne, B.C. Gripping during Climbing of Arboreal Snakes May Be Safe but Not Economical. Biol. Lett. 2014, 10, 20140434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamada, H.; Hirose, S. Study on the 3D Shape of Active Cord Mechanism. In Proceedings of the Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2890–2895. [Google Scholar]
- Kamegawa, T.; Harada, T.; Gofuku, A. Realization of Cylinder Climbing Locomotion with Helical Form by a Snake Robot with Passive Wheels. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3067–3072. [Google Scholar]
- Manzoor, S. Neural Oscillator Based CPG for Various Rhythmic Motions of Modular Snake Robot with Active Joints. J. Intell. Robot. Syst. 2019, 94, 641–654. [Google Scholar] [CrossRef]
- Chirikjian, G.S.; Burdick, J.W. A Modal Approach to Hyper-Redundant Manipulator Kinematics. IEEE Trans. Robot. Automat. 1994, 10, 343–354. [Google Scholar] [CrossRef] [Green Version]
- Lipkin, K.; Brown, I.; Peck, A.; Choset, H.; Rembisz, J.; Gianfortoni, P.; Naaktgeboren, A. Differentiable and Piecewise Differentiable Gaits for Snake Robots. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1864–1869. [Google Scholar]
- Zhen, W.; Gong, C.; Choset, H. Modeling Rolling Gaits of a Snake Robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3741–3746. [Google Scholar]
- Sun, H.; Liu, X.; Ma, P. On the Tree-Climbing Staitic Mechanism of a Snake Robot Climbing Trees. Robot 2008, 30, 112–116. [Google Scholar] [CrossRef]
- Wei, W.; Zhu, H. Research of Helical Rolling Gait of Snake-like Robot in Detection of Bridge Cables. Comput. Eng. Des. 2011, 32, 700–702. [Google Scholar] [CrossRef]
- Goldman, G.; Hong, D. Considerations for Finding the Optimal Design Parameters for a Novel Pole Climbing Robot. In Proceedings of the Volume 2: 32nd Mechanisms and Robotics Conference, Parts A and B, New York, NY, USA, 3–6 August 2008; ASMEDC: Brooklyn, NY, USA, 2008; pp. 859–866. [Google Scholar]
- Liu, X.; Gao, Z.; Zang, Y.; Zhang, L. Tribological Mechanism and Propulsion Conditions for Creeping Locomotion of the Snake-like Robot. J. Mech. Eng. 2021, 57, 189–201. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.40 | 0.40 | 0.50 | 0.50 | 0.60 | 0.66 | 0.80 | 0.80 | 1.00 | 1.00 | |
| 1.00 | 1.30 | 0.90 | 1.35 | 1.30 | 0.70 | 1.00 | 1.20 | 1.20 | 1.35 | |
| 5.19 | 17.27 | 4.53 | 21.86 | 9.78 | 3.34 | 7.40 | 12.49 | 6.46 | 8.78 |
| Optimal value | −0.0812 | 2.2446 | −0.5158 | 0.0149 | 0.0187 | 0.0756 | −1.2878 | 0.4128 |
| Symbol | Meaning | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|---|
| Radius of Cylinder | 20 | 20 | 20 | 20 | |
| Friction Coefficient | 0.4 | 0.4 | 0.4 | 0.4 | |
| Helical Pitch | 10 | 10 | 10 | 10 | |
| Maximum Rotation Angle | 75 | 75 | 75 | 75 | |
| Coefficient of Contact Point | 0.5 | 0.5 | 0.5 | 0.5 | |
| Minimum Length of Module | 5 | 5 | 5 | 5 | |
| Maximum Length of Module | 5 | 5 | 5 | 5 | |
| Weight of | 0.15 | 0.15 | 0.70 | 0.33 | |
| Weight of | 0.15 | 0.70 | 0.15 | 0.33 | |
| Weight of | 0.70 | 0.15 | 0.15 | 0.33 | |
| Length of Module | 9.2326 | 11.2376 | 8.0152 | 12.1638 | |
| Radius of Module | 4.2781 | 4.5013 | 3.0201 | 4.1032 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Stiffness | 2855.00 | Dynamic Friction Coeff. | 0.25 |
| Damping | 0.57 | Static Friction Vel. | 0.10 |
| Exponent | 1.10 | Dynamic Friction Vel. | 10.00 |
| Penetration Depth | 0.10 | Coefficient of Restitution | 0.80 |
| Static Friction Coeff. | 0.30 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Zang, Y.; Guan, B.; Wu, Z.; Gao, Z. Analysis and Optimization Based on Factors Affecting the Spiral Climbing Locomotion of Snake-like Robot. Electronics 2022, 11, 4002. https://doi.org/10.3390/electronics11234002
Zhang P, Zang Y, Guan B, Wu Z, Gao Z. Analysis and Optimization Based on Factors Affecting the Spiral Climbing Locomotion of Snake-like Robot. Electronics. 2022; 11(23):4002. https://doi.org/10.3390/electronics11234002
Chicago/Turabian StyleZhang, Peng, Yong Zang, Ben Guan, Zhaolin Wu, and Zhiying Gao. 2022. "Analysis and Optimization Based on Factors Affecting the Spiral Climbing Locomotion of Snake-like Robot" Electronics 11, no. 23: 4002. https://doi.org/10.3390/electronics11234002