
Collaborative Accurate Vehicle Positioning Based on Global Navigation Satellite System and Vehicle Network Communication


Abstract
:1. Introduction
2. Research Methodology
2.1. Component Modules
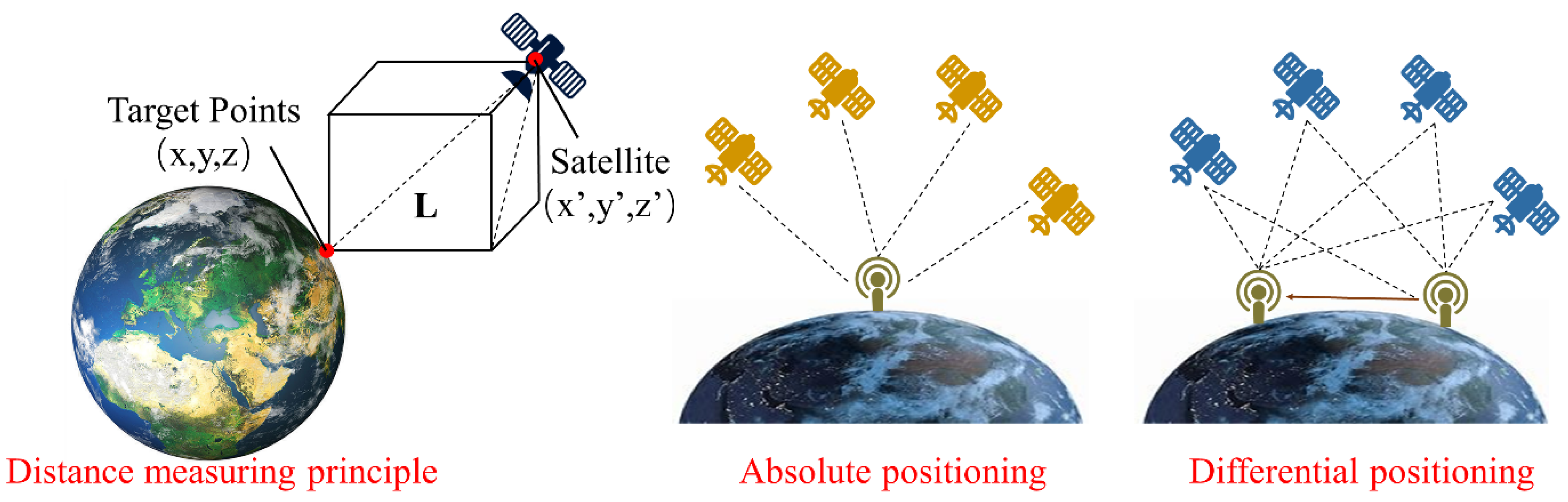
2.1.1. GNSS
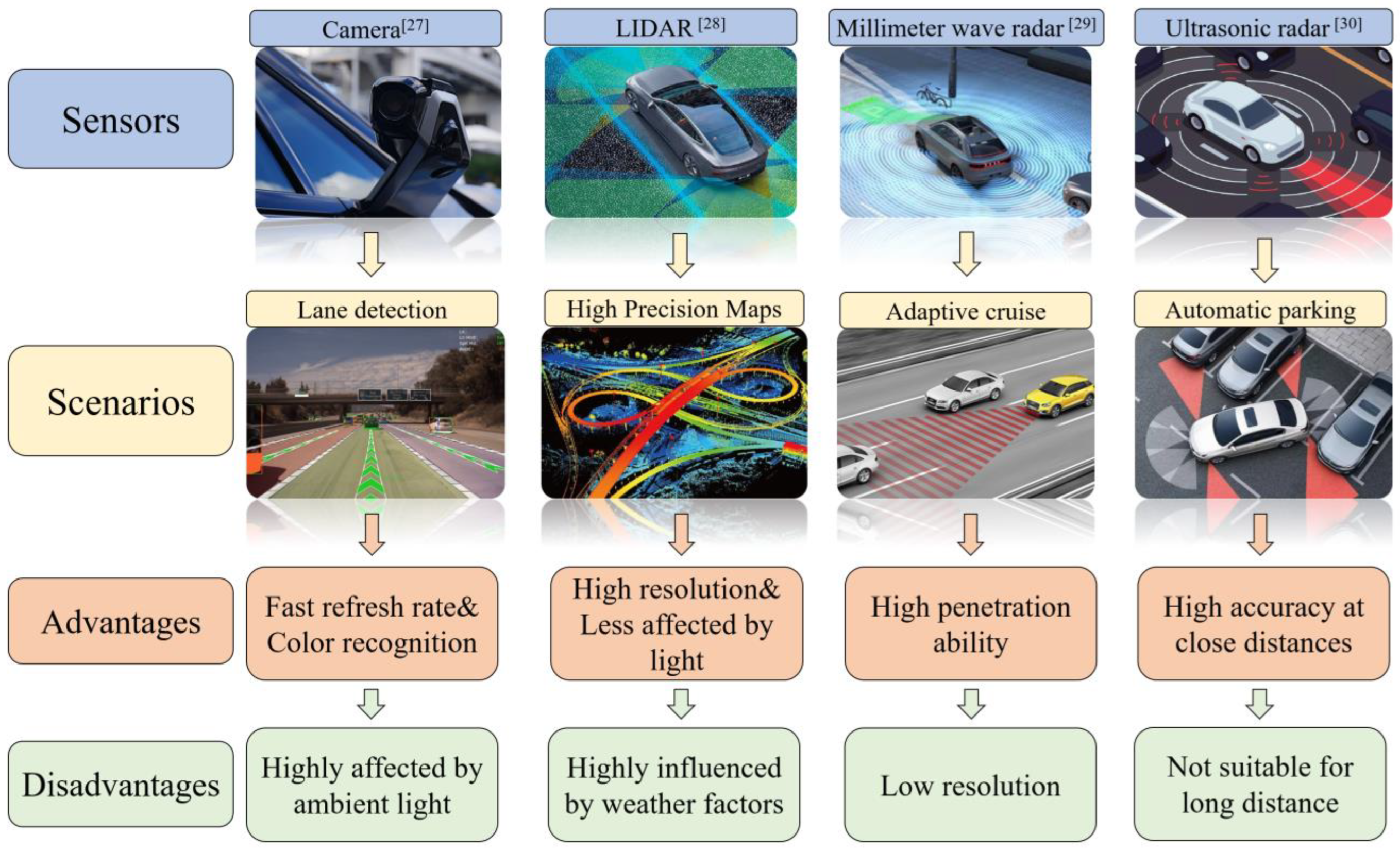
2.1.2. Millimeter Wave Radar
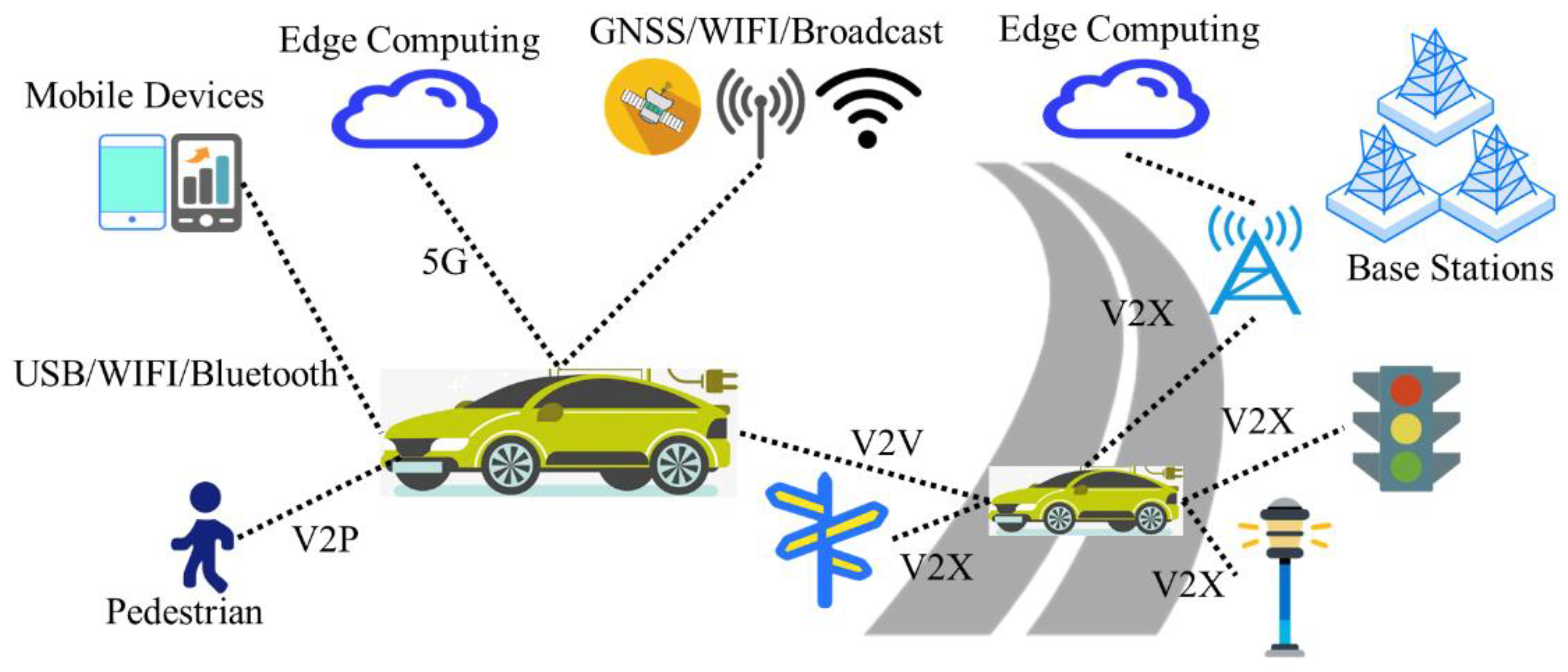
2.1.3. Vehicle Network Communication
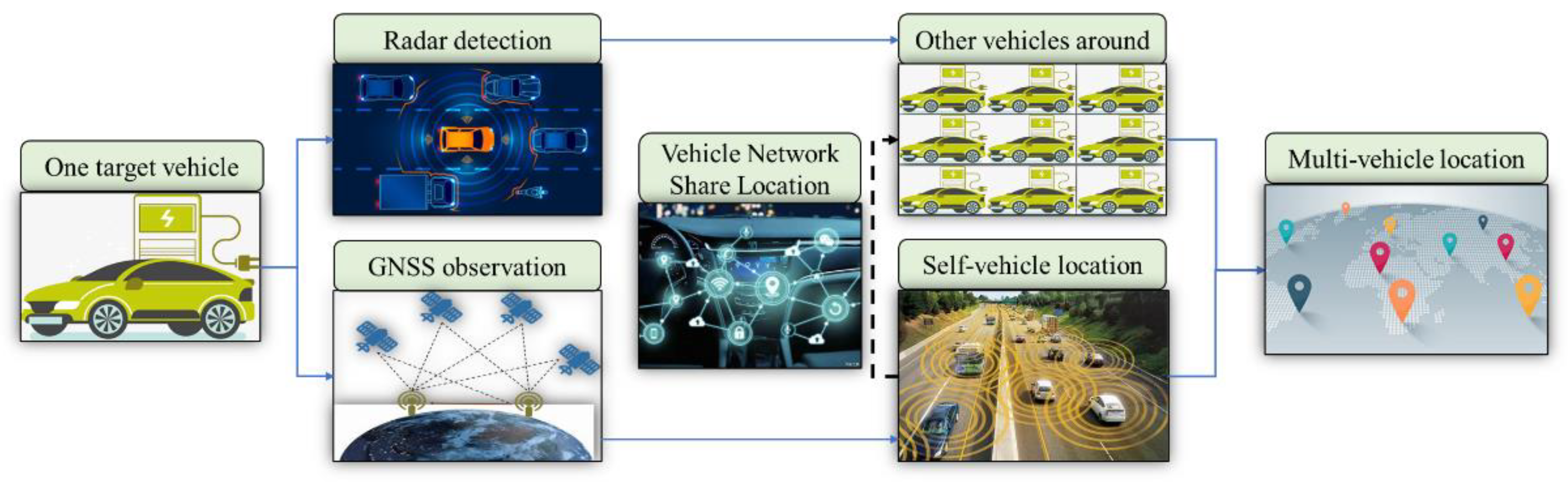
2.2. Overall Flow of the Method
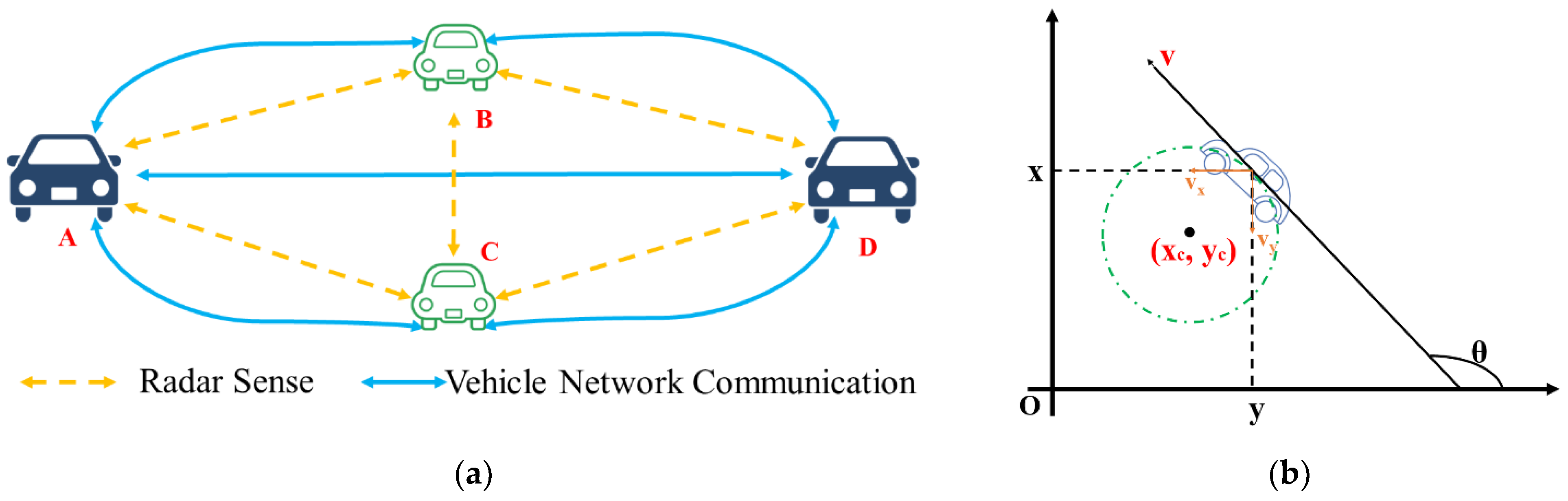
2.3. Vehicle Modeling Based on Velocity Motion Model
2.4. Estimation of Vehicle Location by Relative Positioning
2.5. Simulation Contents
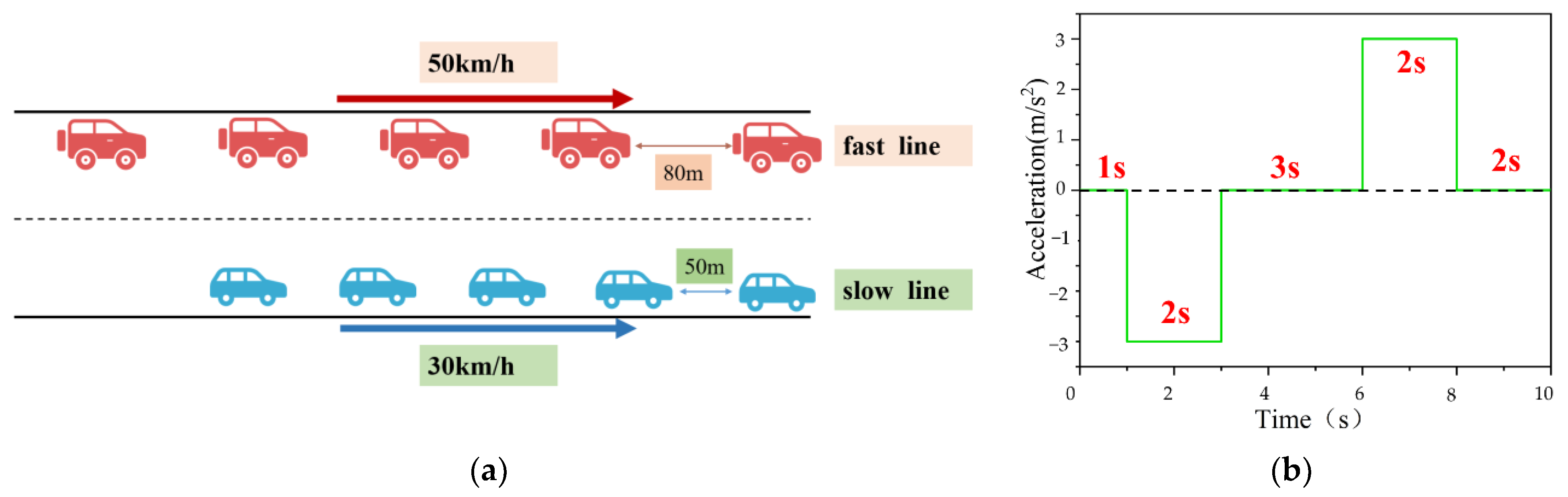
2.5.1. Linear Motion Simulation
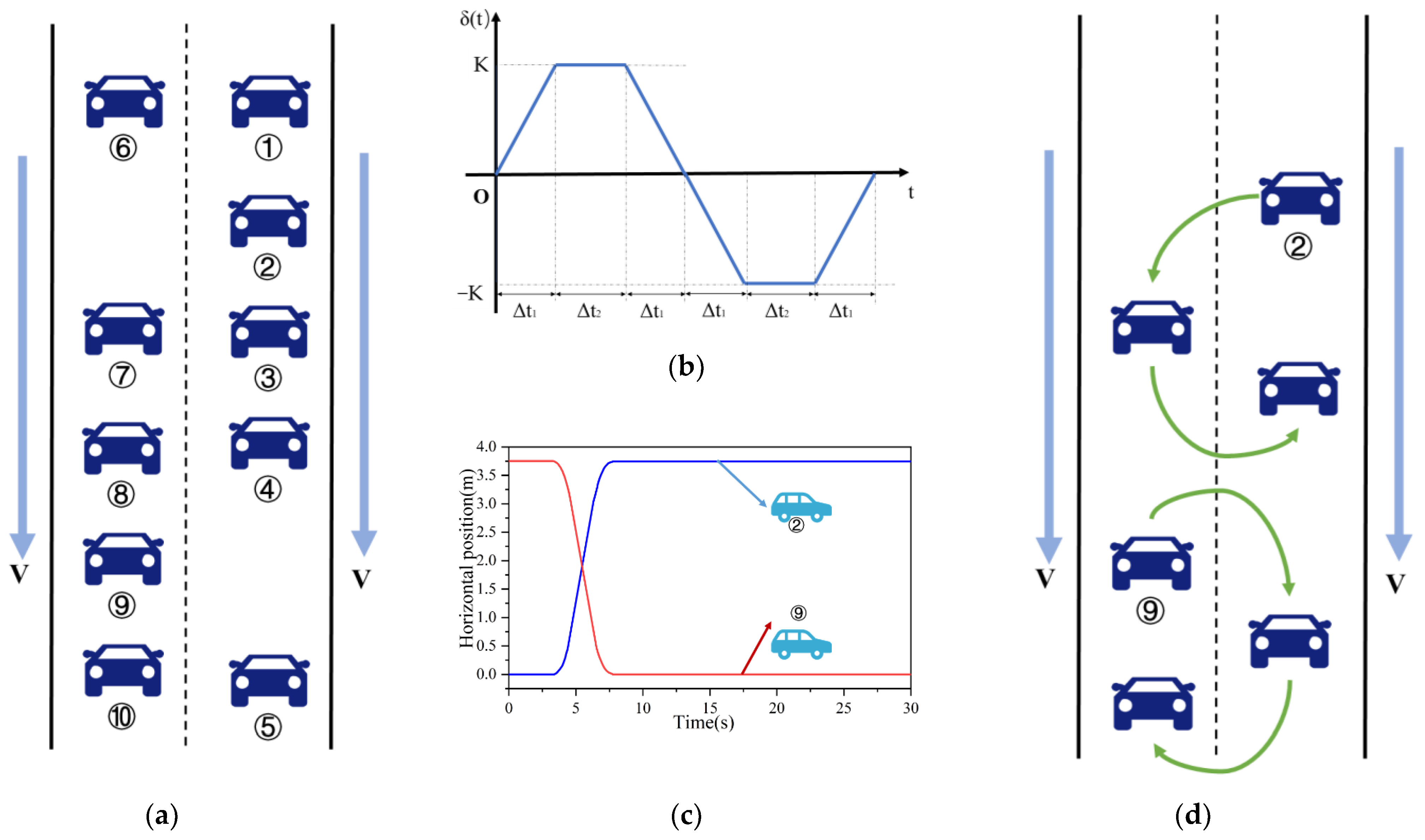
2.5.2. Lane Change Motion Simulation
2.5.3. Module Parameter Setting
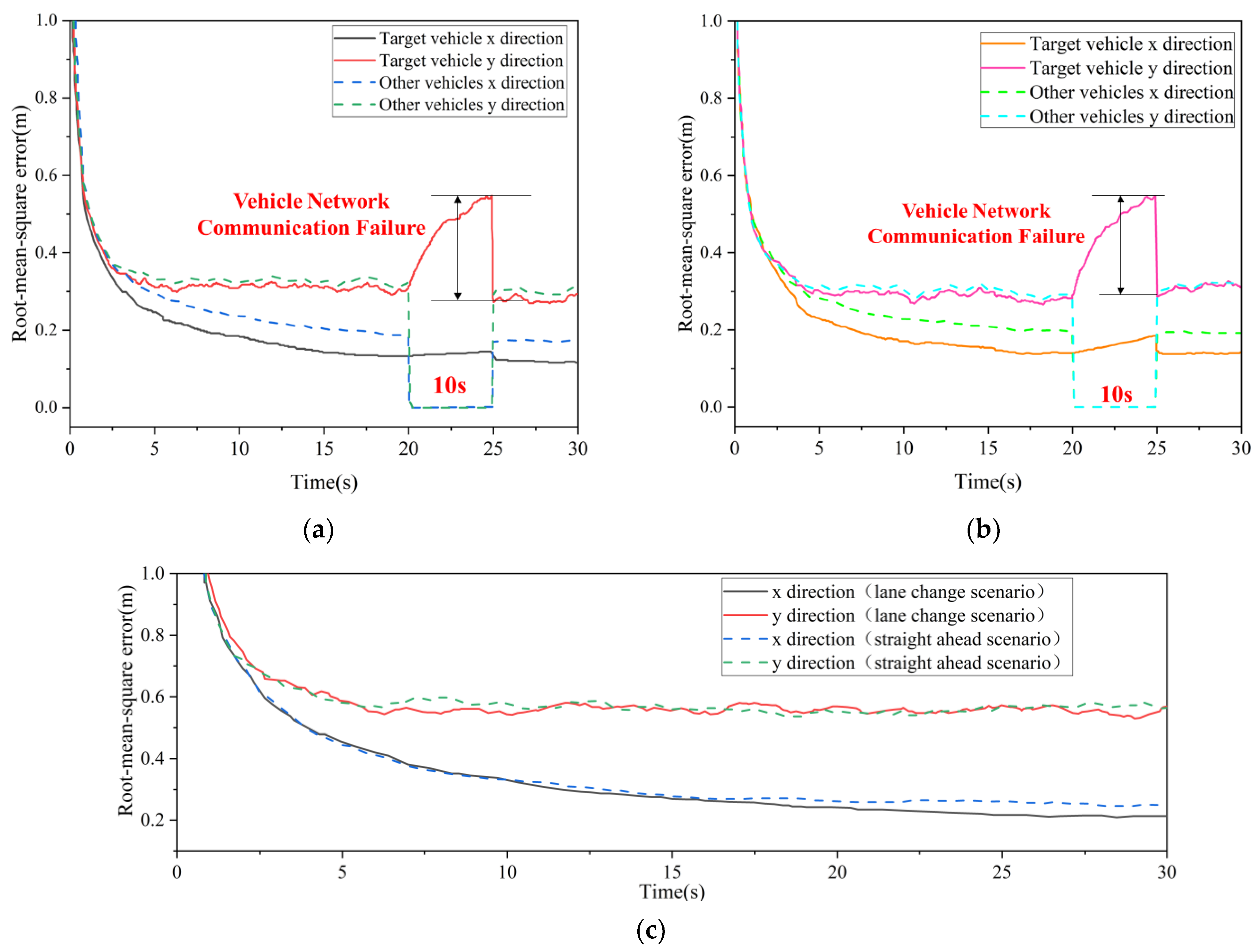
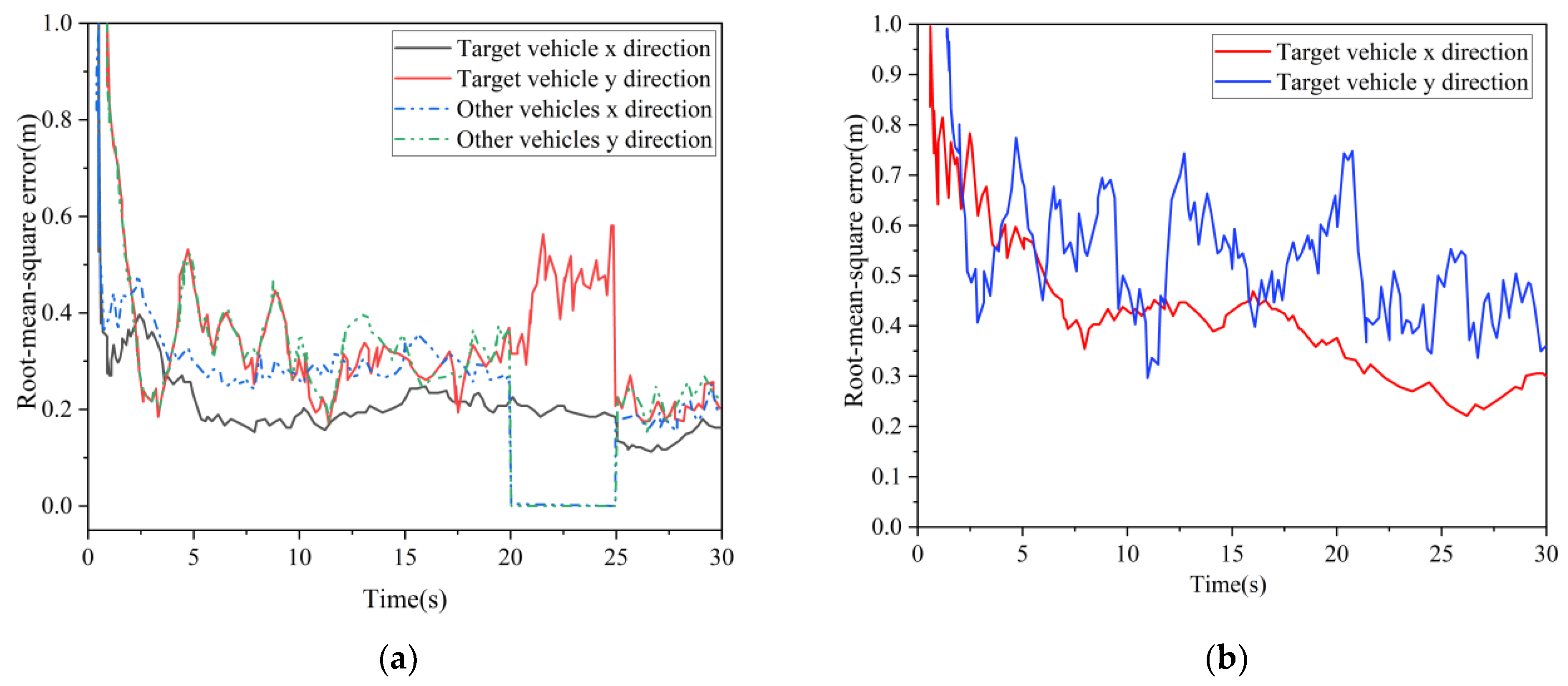
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Q.; Xu, N.; Huang, B.; Wang, G. Part-Aware Refinement Network for Occlusion Vehicle Detection. Electronics 2022, 11, 1375. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Yao, Y. Fault prognosis of battery system based on accurate voltage abnormity prognosis using long short-term memory neural networks. Appl. Energy 2019, 251, 113381. [Google Scholar] [CrossRef]
- Schinkel, W.; van der Sande, T.; Nijmeijer, H. State estimation for cooperative lateral vehicle following using vehicle-to-vehicle communication. Electronics 2021, 10, 651. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Chen, W.; Yao, Y. Synchronous multi-parameter prediction of battery systems on electric vehicles using long short-term memory networks. Appl. Energy 2019, 254, 113648. [Google Scholar] [CrossRef]
- Williams, T.; Alves, P.; Lachapelle, G.; Basnayake, C. Evaluation of GPS-based methods of relative positioning for automotive safety applications. Transp. Res. Part C Emerg. Technol. 2012, 23, 98–108. [Google Scholar] [CrossRef]
- Adegoke, E.I.; Zidane, J.; Kampert, E.; Ford, C.R.; Birrell, S.A.; Higgins, M.D. Infrastructure Wi-Fi for connected autonomous vehicle positioning: A review of the state-of-the-art. Veh. Commun. 2019, 20, 100185. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.; Jeon, H.; Yun, S.; Kim, B.W.; Jung, S.Y. Vehicle Positioning Based on Optical Camera Communication in V2I Environments. Comput. Mater. Contin. 2022, 72, 2927–2945. [Google Scholar] [CrossRef]
- Sarras, I.; Marzat, J.; Bertrand, S.; Piet-Lahanier, H. Collaborative multiple micro air vehicles’ localization and target tracking in GPS-denied environment from range–velocity measurements. Int. J. Micro Air Veh. 2018, 10, 225–239. [Google Scholar] [CrossRef] [Green Version]
- McLaughlin, P.; Vagg, C. A New Method of Vehicle Positioning Using Bumps and Road Surface Defects. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13655–13665. [Google Scholar] [CrossRef]
- Hossain, M.; Elshafiey, I.; Al-Sanie, A. Cooperative vehicle positioning with multi-sensor data fusion and vehicular communications. Wirel. Netw. 2019, 25, 1403–1413. [Google Scholar] [CrossRef]
- Wang, H.; Wan, L.; Dong, M.; Ota, K.; Wang, X. Assistant vehicle localization based on three collaborative base stations via SBL-based robust DOA estimation. IEEE Internet Things J. 2019, 6, 5766–5777. [Google Scholar] [CrossRef]
- Tao, X.; Zhu, B.; Xuan, S.; Zhao, J.; Jiang, H.; Du, J.; Deng, W. A Multi-Sensor Fusion Positioning Strategy for Intelligent Vehicles Using Global Pose Graph Optimization. IEEE Trans. Veh. Technol. 2021, 71, 2614–2627. [Google Scholar] [CrossRef]
- Zhang, G.; Ng, H.F.; Wen, W.; Hsu, L.T. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6175–6187. [Google Scholar] [CrossRef]
- Zhang, G.; Wen, W.; Hsu, L.T. Rectification of GNSS-based collaborative positioning using 3D building models in urban areas. GPS Solut. 2019, 23, 1–12. [Google Scholar] [CrossRef]
- Nam, S.; Lee, D.; Lee, J.; Park, S. CNVPS: Cooperative neighboring vehicle positioning system based on vehicle-to-vehicle communication. IEEE Access 2019, 7, 16847–16857. [Google Scholar] [CrossRef]
- Zhu, B.; Tao, X.; Zhao, J.; Ke, M.; Wang, H.; Deng, W. An integrated GNSS/UWB/DR/VMM positioning strategy for intelligent vehicles. IEEE Trans. Veh. Technol. 2020, 69, 10842–10853. [Google Scholar] [CrossRef]
- Mahmoud, A.; Noureldin, A.; Hassanein, H.S. Integrated positioning for connected vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 397–409. [Google Scholar] [CrossRef]
- Hou, X.; Luo, L.; Cai, W.; Guo, B. E2T-CVL: An Efficient and Error-Tolerant Approach for Collaborative Vehicle Localization. IEEE Internet Things J. 2021, 9, 3481–3494. [Google Scholar] [CrossRef]
- Buehrer, R.M.; Wymeersch, H.; Vaghefi, R.M. Collaborative sensor network localization: Algorithms and practical issues. Proc. IEEE 2018, 106, 1089–1114. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Sun, S. Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video. Sustainability 2021, 13, 5334. [Google Scholar] [CrossRef]
- Ansari, K. Cooperative position prediction: Beyond vehicle-to-vehicle relative positioning. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1121–1130. [Google Scholar] [CrossRef]
- Tong, Q.; Yang, Z.; Chai, G.; Wang, Y.; Qi, Z.; Wang, F.; Yin, K. Driving state evaluation of intelligent connected vehicles based on centralized multi-source vehicle road collaborative information fusion. Environ. Dev. Sustain. 2022. [Google Scholar] [CrossRef]
- Kim, S.T.; Fan, M.; Jung, S.W.; Ko, S.J. External Vehicle Positioning System Using Multiple Fish-Eye Surveillance Cameras for Indoor Parking Lots. IEEE Syst. J. 2020, 15, 5107–5118. [Google Scholar] [CrossRef]
- Wan, L.; Zhang, M.; Sun, L.; Wang, X. Machine learning empowered IoT for intelligent vehicle location in smart cities. ACM Trans. Internet Technol. (TOIT) 2021, 21, 1–25. [Google Scholar] [CrossRef]
- Lee, W.C.; Jeon, Y.B.; Han, S.S.; Jeong, C.S. Position Prediction in Space System for Vehicles Using Artificial Intelligence. Symmetry 2022, 14, 1151. [Google Scholar] [CrossRef]
- Kong, X.; Gao, H.; Shen, G.; Duan, G.; Das, S.K. Fedvcp: A federated-learning-based cooperative positioning scheme for social internet of vehicles. IEEE Trans. Comput. Soc. Syst. 2021, 9, 197–206. [Google Scholar] [CrossRef]
- Gao, C.; Wang, J.; Lu, X.; Chen, X. Urban Traffic Congestion State Recognition Supporting Algorithm Research on Vehicle Wireless Positioning in Vehicle–Road Cooperative Environment. Appl. Sci. 2022, 12, 770. [Google Scholar] [CrossRef]
- Wang, L.L.; Gui, J.S.; Deng, X.H.; Zeng, F.; Kuang, Z.F. Routing algorithm based on vehicle position analysis for internet of vehicles. IEEE Internet Things J. 2020, 7, 11701–11712. [Google Scholar] [CrossRef]
- Watta, P.; Zhang, X.; Murphey, Y.L. Vehicle position and context detection using V2V communication. IEEE Trans. Intell. Veh. 2020, 6, 634–648. [Google Scholar] [CrossRef]
- Haider, A.; Hel-Or, H. What Can We Learn from Depth Camera Sensor Noise? Sensors 2022, 22, 5448. [Google Scholar] [CrossRef]
- Li, N.; Ho, C.P.; Xue, J.; Lim, L.W.; Chen, G.; Fu, Y.H.; Lee, L.Y.T. A Progress Review on Solid-State LiDAR and Nanophotonics-Based LiDAR Sensors. Laser Photonics Rev. 2022, 2100511. [Google Scholar] [CrossRef]
- Zhu, B.; Sun, Y.; Zhao, J.; Zhang, S.; Zhang, P.; Song, D. Millimeter-Wave Radar in-the-Loop Testing for Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11126–11136. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An overview of autonomous vehicles sensors and their vulnerability to weather conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef]
- Park, K.W.; Park, J.I.; Park, C. Efficient methods of utilizing multi-SBAS corrections in multi-GNSS positioning. Sensors 2020, 20, 256. [Google Scholar] [CrossRef] [Green Version]
- San Martín, J.; Cortés, A.; Zamora-Cadenas, L.; Svensson, B.J. Precise positioning of autonomous vehicles combining UWB ranging estimations with on-board sensors. Electronics 2020, 9, 1238. [Google Scholar] [CrossRef]
- Yang, J.A.; Kuo, C.H. Integrating Vehicle Positioning and Path Tracking Practices for an Autonomous Vehicle Prototype in Campus Environment. Electronics 2021, 10, 2703. [Google Scholar] [CrossRef]
- Li, W.; Shen, Y.Z. The consideration of formal errors in spatiotemporal filtering using principal component analysis for regional GNSS position time series. Remote Sens. 2018, 10, 534. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Lane Change Scenario | Straight Ahead Scenario | |||
|---|---|---|---|---|---|
| Error (m) | Co-Positioning | Single Positioning | Co-Positioning | Single Positioning | |
| Root mean square error in the x-direction | 0.20 | 0.36 | 0.27 | 0.38 | |
| Root mean square error in y-direction | 0.36 | 0.61 | 0.34 | 0.62 | |
| Total root mean square error | 0.42 | 0.73 | 0.44 | 0.74 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Hong, J.; Wei, L.; Gong, X.; Xu, X. Collaborative Accurate Vehicle Positioning Based on Global Navigation Satellite System and Vehicle Network Communication. Electronics 2022, 11, 3247. https://doi.org/10.3390/electronics11193247
Yang H, Hong J, Wei L, Gong X, Xu X. Collaborative Accurate Vehicle Positioning Based on Global Navigation Satellite System and Vehicle Network Communication. Electronics. 2022; 11(19):3247. https://doi.org/10.3390/electronics11193247
Chicago/Turabian StyleYang, Haixu, Jichao Hong, Lingjun Wei, Xun Gong, and Xiaoming Xu. 2022. "Collaborative Accurate Vehicle Positioning Based on Global Navigation Satellite System and Vehicle Network Communication" Electronics 11, no. 19: 3247. https://doi.org/10.3390/electronics11193247