1. Introduction
In the last decade, a high synergy between the skills of scientific research and the world of industry has emerged for the development of technologically transferable physical-mathematical models capable of formalizing the increasingly performing behaviors of micro-electro-mechanical systems (MEMS) [
1,
2,
3]. Today, these devices are considered “intelligent” because they combine electrical, electronic, mechanical, optical and other behaviors, managing highly complex industrial processes [
4,
5,
6,
7,
8,
9]. Among these, electrostatic MEMS with parallel metal plates are widely used devices in the industry, as they are easy to construct and exhibit high versatility [
1,
10,
11]. Today, theoretical modeling of these devices is so advanced as to evaluate any correspondences between mechanical stresses of the deformable elements and the intended use of the device without neglecting the possibility of carrying out functionality tests in operation, which would normally require the destruction of the device itself [
12,
13]. Whatever the intended use of the device, it is necessary that there are no electrostatic discharge phenomena inside it, caused by contact between deformable and fixed elements, which would damage the device itself [
14,
15,
16]. Therefore, it appears necessary to reduce, as much as possible, the physical causes, such as the fringing field, to produce an excessive approach between deformable and fixed elements [
17,
18,
19]. The fringing field, which strongly depends on the length/width ratio of the device, produces important effects on the bending of the lines of force of the electric field,
, inside it, manifesting this influence near the edges; however, in the center, this effect is almost nil [
20,
21]. Among these models is an important dimensionless integro-differential model of the fourth order, studied with a high level of attention to detail in [
22], which, being endowed with global existence results, opened interesting scenarios regarding future developments. However, due to its formulation, the dimensionless model studied in [
22] is not very suitable for technology transfer, since some of its analytical elements do not correctly model the behavior of some elements present in the device. This impasse was overcome in [
17] where, starting from [
22], a new formulation of the dimensionless model was presented and studied, more in keeping with the industrial reality of the MEMS devices produced, which also considers the effects due at the fringing field. This dimensionless model takes the form:
where
represents the smooth bounded domain (MEMS device);
defines the profile of the deforming plate;
is a bounded function which considers the dielectric properties of the material constituting the deformable plate;
is a positive dimensionless parameter depending on the applied voltage,
V, defined as in (
3) which represents the ratio of a reference electrostatic force to a reference elastic force;
is a positive dimensionless parameter which takes into account the stiffness of the deformable plate;
is a positive dimensionless parameter which takes into account the stretching effect in the deformable plate;
, defined as in (
8), is a positive dimensionless parameter which takes into account the non-local dependence of
V on the solution due to a possible non-uniform electric charge distribution;
is a positive dimensionless parameter (usually constant) that weighs the effects due to the fringing field.
takes into account, according to the Pelesko–Driscoll theory, the effects due to the fringing field [
17,
23].
In the past, simplified physical-mathematical models, containing terms due to the fringing field but poorly adhering to industrial realities, have been proposed, studied, and validated [
23,
24].
Model (
1) appears interesting for many reasons. On one hand,
allows easy software/hardware implementations, while on the other hand, it is voltage controllable (presence of
that, as specified in (
3), depends on
V), even if the dependence of
on the applied external voltage has not yet been highlighted (satisfactory limitations of
have been obtained for membrane MEMS devices [
17,
23,
24]). However, even if the stability of (
1) has not yet been studied (for which any unstable positions of the deformable plate would risk causing unwanted electrostatic discharges), the device is controlled in voltage (presence of
). In such cases, appropriate destinations of use (such as biomedical ones, at reduced voltage) reduce the risk of electrostatic discharges. We also observe that, in (
1), there are terms due to stiffness and self-stretching (identifiable by the parameters
and
) of the deformable element to take into account the mechanical phenomena of fatigue due to the continuous rising-lowering of the deformable element. Furthermore, with the deformation of the plate, significant variations of electrostatic capacitance occur inside the MEMS, making it necessary to express its dependence on the geometric parameters of the device and on an auxiliary electrostatic capacitance (
) capable of opposing sudden voltage variations applied (presence of
in (
1)) [
1,
17]. Finally,
in (
1) (present in the “capacitive” term of the model) models the dielectric properties of the plates.
Equation (
1) does not allow to obtain
explicitly, thus in [
17], important conditions of global existence and uniqueness for the solution have been obtained by opening possible scenarios for the numerical reconstruction of
profiles without representing ghost solutions (i.e., approximate solutions not satisfying the conditions of existence and uniqueness for (
1)). Therefore, the main aims of this paper can be summarized in the following items:
Exploiting the conditions of global existence and uniqueness for (
1), fundamental results are discussed highlighting that, starting from the reference energy state, the solution is unique ensuring that the profile of the deformable plate is uniquely determined without highlighting anomalies in the curvature of the deformable plate (especially in the start-up phase). This item is very important because, compared to what is already known in the literature, the existence and uniqueness of the solution for (
1) is studied starting from a reference energy state, thus linking the important properties of existence and uniqueness with the minimum energy level necessary to move the deformable plate.
After selecting the dielectric profile, (in order to satisfy binding physical requirements allowing comparison with experimental setups known in the literature), we discuss important industrial implications in terms of limitations both for the applied voltage, V, and for the mechanical tension of the deformable plate at rest, T, providing both a graphical differentiation of areas allowed in the plane and reference energy states. So, unlike what is already known in the literature (where in the dimensionless mathematical models is set equal to the unit), in this paper we provide a useful criterion for selecting the intended use of the device, based on , starting at .
We study how the fringing field affects the electrostatic force in the device, obtaining an increase for it depending on both V (which affects the intended use of the device) and T (which influences the choice of material of the deformable plate). In the literature, there are no increases for either V or T, thus failing to provide maximum admissible values for both. This item of the present work fills this gap.
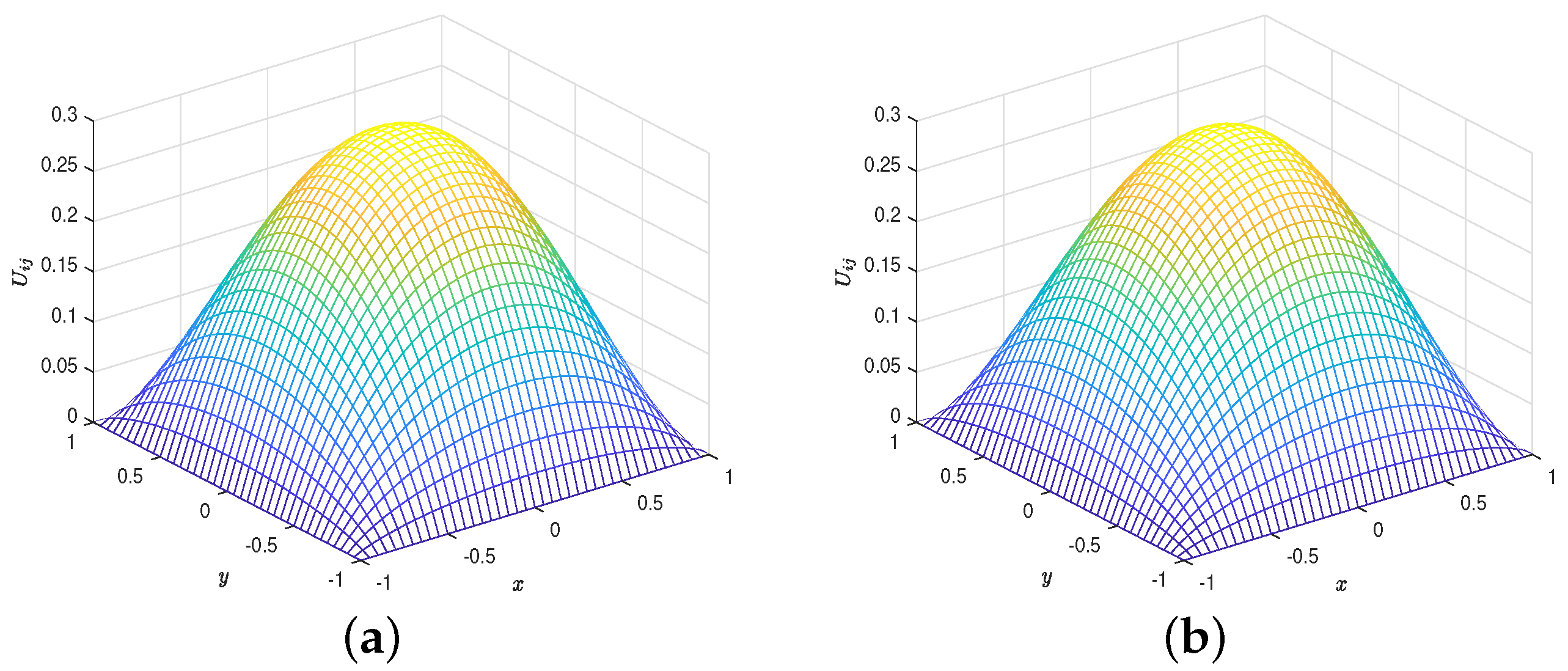
Following a simplification in the model that does not affect the goodness of the results obtained, the numerical recovering of the deformable plate profile was obtained by the finite difference method (implemented in MatLab® R2019a running on an Intel Core 2 CPU at 1.45 GHz) “gold standard” for model as (
1), under different operating conditions, giving results compatible with the conditions of global existence and uniqueness of the solution (thus not representing ghost solutions).
We also provide an effective criterion for choosing the intended use of the device (strongly linked to V) starting from the choice of the material constituting the deformable plate (strongly dependent on T) and vice versa very useful for any industrial applications (unlike the scientific works known in the literature where such a criterion has never been elaborated).
Furthermore, how the electro-mechanical properties of the deformable plate affect the numerical profile recovering is studied and discussed also selecting the most important intended uses of the studied device.
Finally, important comparative results with experimental setups concerning pull-in voltage and electrostatic pressure are presented.
The reminder of the paper is organized as follows: Beginning with the description of the device and analyzing both behavior and analytical models (
Section 2), the most important results of global existence and uniqueness for the solution for (
1) are summarized in
Section 3. Next, after selecting the dielectric profile of the deformable plate as specified in
Section 4 (according to several industrial applications),
Section 5, starting the above-mentioned inequality governing the global existence and uniqueness for (
1), discussions and important limitations for both the intended use of the device and the mechanical properties of the deformable plate are deduced, respectively. Once
Section 6 formalizes the link between the fringing field and electrostatic force in the device, a numerical approach is proposed and applied in
Section 7 to recover the profile of the deformable plate, the results of which are presented and discussed in
Section 8.
Section 9 discusses an interesting limitation for the mechanical tension of the deformable plate, while
Section 10 and
Section 11, respectively, discuss some details concerning the possible influence of the properties of the deformable plate on the numerical procedure and the possible intended uses of the device. Finally,
Section 12 presents the results concerning the pull-in voltage and the electrostatic pressure. Further conclusions and perspectives on these issues complete this work.
2. The Behavior of the MEMS Device: The Analytical Model with Fringing Field
The electrostatic MEMS studied in this paper is an elastic system consisting of two parallel plates (of the same material and equal thickness) of which the upper one (non-deformable) is at
electric potential, while the lower plate (bound to the edges and at electric potential reference,
) deforms towards the top plate without touching it (to avoid unwanted electrostatic discharges) (for further details, ref. [
17]).
Figure 1 displays a 3
D schematic of the device (the deformable plate is in its rest position).
As already detailed in [
17], if
V is the drop voltage, the load function
(which establishes how the deformable plate is stressed when
V is applied, determining
which locally activates an electrostatic pressure deforming the plate) can be written as [
17]
with
where
is the permittivity of the free space,
d is distance between the plates, and
L is the length of the MEMS. (
2), according the Pelesko’s procedure [
1,
25], is necessary to formulate
where
and
are specific weight functions as below defined. It should be noted that (
2) cannot electrically control the MEMS because the applied
V must be controlled in order to avoid sudden deformation of the deformable plate. Then, a capacitive control device (such as the one hypothesized in [
17]) can be used to avoid this drawback. Particularly, considering the series of a source voltage,
, and a capacitor,
, it follows that
in which [
17]
achieving
Therefore, setting
from (
7), we can write
Finally, (
2) becomes
so that (
4) assumes the final form
We also observe that
mainly depends on the capacity [
1] and, furthermore,
[
17], thus avoiding a dangerous bifurcation phenomena which can make the device highly unstable (particularly if
the rupture of the device can takes place [
17]). Finally,
being an operator indicative of the curvature assumed by the plate during deformation [
26], it can be proved that
, in elastic regimes, takes the form [
17]:
and being
[
1,
17,
26] (
D, flexural rigidity of the material constituting the deformable plate) achieves the following model:
studied in [
1,
25], highlighting important results regarding the bifurcation. Finally, to take into account the effects due to the fringing field (physical phenomenon, heavily dependent on the ratio
, that manifests itself with the curvature of the
lines of force, more evident at the edges of the device and negligible in its center), we use the Pelesko–Driscoll formulation [
23] that quantifies these effects through the addend
(for details, [
17,
22,
23]), achieving model (
1).
Table 1 lists all symbols present in (
1).
We observe that, under the effect of the fringing field, the electrostatic capacity of MEMS varies considerably and can also be formulated through empirical approaches [
1,
18,
25]. Recently, many MEMS models with fringing field have been studied according to the Pelesko–Driscoll theory [
24] (which, however, propose studies on highly simplified models). Obviously, even if (
1) models a detailed behavior of the MEMS under study, it does not consider further non-linearities (local mechanical stresses, bifurcations), and thus introduces a degree of uncertainty. However, to take into account local mechanical stresses would mean to introduce in the model a terms depending, for example, on the Piola-Kirchhoff tensor which, usually, exhibits discontinuities along the surface of separation between different zones of the deformable plate. This additional term would reduce the amplitude of the deformation of the membrane profile by approximately 5%. Therefore, not considering the contribution due to this term allows us to affirm that the numerical recovering we will obtain will be overestimated but for the sake of safety since we are sure that the real deformation of the deformable plate is below that reconstructed numerically (certainty that the deformable plate does not touch the upper wall of the device). Furthermore, considering
(
, pull-in voltage) assures us that bifurcation phenomena cannot take place.
Remark 1. It is worth noting that model (1) represents of a generalization of the model extensively studied in [27]. In fact, when (i.e., in the presence of a deformable membrane), it is easy to achievewhich represents the model studied in [27]. Remark 2. From (3), it is easy to deduce that by selecting the type of device (that is, by choosing T), its intended use is determined (λ is proportional to ). The converse is also valid: once the use of MEMS has been identified, the material constituting the deformable plate can be selected (in other words, the intended use of the device sets an important limitation for λ). Therefore, as already verified in the past for other devices [28], the link between the intended use of the device and the mechanical properties of the deformable plate is confirmed. Remark 3. Equation (2), as already mentioned, represents the type of load on the deformable plate applying V externally (V determines between the two plates by generating the electrostatic force which, per surface unit, is transformed into electrostatic pressure acting on the deformable plate). Then, the need for (2) to depend on V is confirmed. Remark 4. We observe that the dielectric properties of the material constituting the deformable plate are decisive for the operation of the device when the deformation is the maximum allowed [1,25]. In fact, indicating with the minimum distance allowed between the two plates, it follows that (this is due to the fact that, physically, the deformable plate must not touch the upper plate and, mathematically, in (1) .). If , from the equation of model (1), it follows that , so that (2) is canceled. Industrially, this is highly important, because contributes to determine the electrostatic load in the device. Therefore, (1) represents a good formulation for the device, since it takes into account (as already experimentally tested for similar devices [29]). Remark 5. Equation (1) models electrostatic MEMS for industrial applications that require small displacements of the deformable plate (). In fact, if (d the distance between the two plates at rest, A the surface of the plates) the effects due to the fringing field would be negligible (i.e., ). However, from it would follow which does not fit well with the hypothesis of small displacements. This confirms that (1) is a good model for industrial developments. Remark 6. Unlike other analytical models [29,30], Equation (1) was built on very simple device geometry; this was necessary to carry out the analytical study [17] obtaining results which, even if they have not yet achieved an experimental confirmation, have provided a significant theoretical contribution. 3. An Important Result of Global Existence and Uniqueness
The main global existence and uniqueness result for (
1) was presented in [
17] (However, Equation (
1) does not allow to achieve explicit solutions). For simplicity of reading, we report the fundamental Theorem.
Theorem 1. Let us consider a smooth bounded domain , with on which to consider the problem (1). Moreover, let us consider and α, β, γ, . Then, there exists, , problem (1) has a solution with the diameter of Ω, , sufficiently small () and . We note that
(deformable plate), industrially, has dimensions of the order of
. Therefore, the diameter of the domain can be considered
(as predicted by Theorem 1). Furthermore, the constraint
, even if more stringent than
[
31], does not affect the industrial validity of the result (which requires
formulations).
The fact that the result requires
is equivalent to stating that
is measurable, i.e.,
Then, for each point of the deformable plate,
must be bounded. So, (
15) makes sense because
represents the dielectric profile of the deformable plate which must be measurable (and in any case positive and bounded). Furthermore, Theorem 1 dictates that
(0,
:
because
, is pull-in voltage (i.e.,
such that there are no solutions for
). Finally, the continuity of higher order curvatures (
) is required by imposing that the deformable element, during its movement, must not undergo substantial deformations such as to make the device unusable (especially when fatigue phenomena caused by prolonged and continuous exploitation take place [
26]). Obviously, this condition is more restrictive with respect to the conditions required when membrane MEMS are considered. It is worth nothing that, even though
is controllable by
V,
is not; this dependence is expressed by the product
in (
1). In the future, this would require an incisive effort on the possible generalization of the Pelesko–Driskoll theory.
The proof of Theorem 1, exploiting a well-known topological result presented in [
32], is divided into five points preliminarly defining the following two suitable sets:
and
where
M,
and
are suitable positive constants. Moreover, if
,
and
with
such that
where
is the solution of
the following important inequalities governing both global existence and uniqueness for (
1) have been achieved:
where
and
with
.
4. Analytical Modeling of
As proved in [
33], regardless of how the dielectric constant profile is chose, the pull-in instability cannot be avoided [
1,
25,
29]. Thus, it seems legitimate to ask whether a physically valid formulation of
can influence the solutions. It is worth nothing that in [
17] it has been proved that the smooth solution
are symmetric, concave and, moreover,
. From the heuristic point of view, the most unstable area of the device is its center, where the influence of
is very strong and the influence in the supporting boundaries appears rather weak [
33]. This is due to the fact that
is proportional to
so that at the center of the device, by virtue of the symmetry and concavity of the solutions,
assumes a minimum value (i.e., maximum value of
). Therefore, it seems reasonable to try to reduce
in the center of the device as such possible by allowing it to be stronger near the boundaries (more stable parts of the device). So, by choosing
it follows that
which represents the load function (see (
2)). However, we speculate whether specific formulations of
can affect the numerical solutions (and any multiplicity) without neglecting the pull-in voltage and the stable operating range of the device. In this work,
is chosen to satisfy a symmetric power law such as
In addition, a large number of experimental and industrial applications are based on (
26) [
1,
33,
34,
35,
36]. Finally, for
,
.
6. How Fringing Field Affects Electrostatic Force
It is known that [
17],
so that the electrostatic force,
, becomes:
Moreover, if
is the fringing field, one achieves
Therefore, the related electrostatic force becomes
so that, by (
3), one easily achieves
Therefore, the total electrostatic force becomes:
confirming that the
inside the device depends not only on
but also on
(algebraic ratio indicative of the possible presence of the fringing field). Here,
also depends on both
x and
T so that, increasing
T,
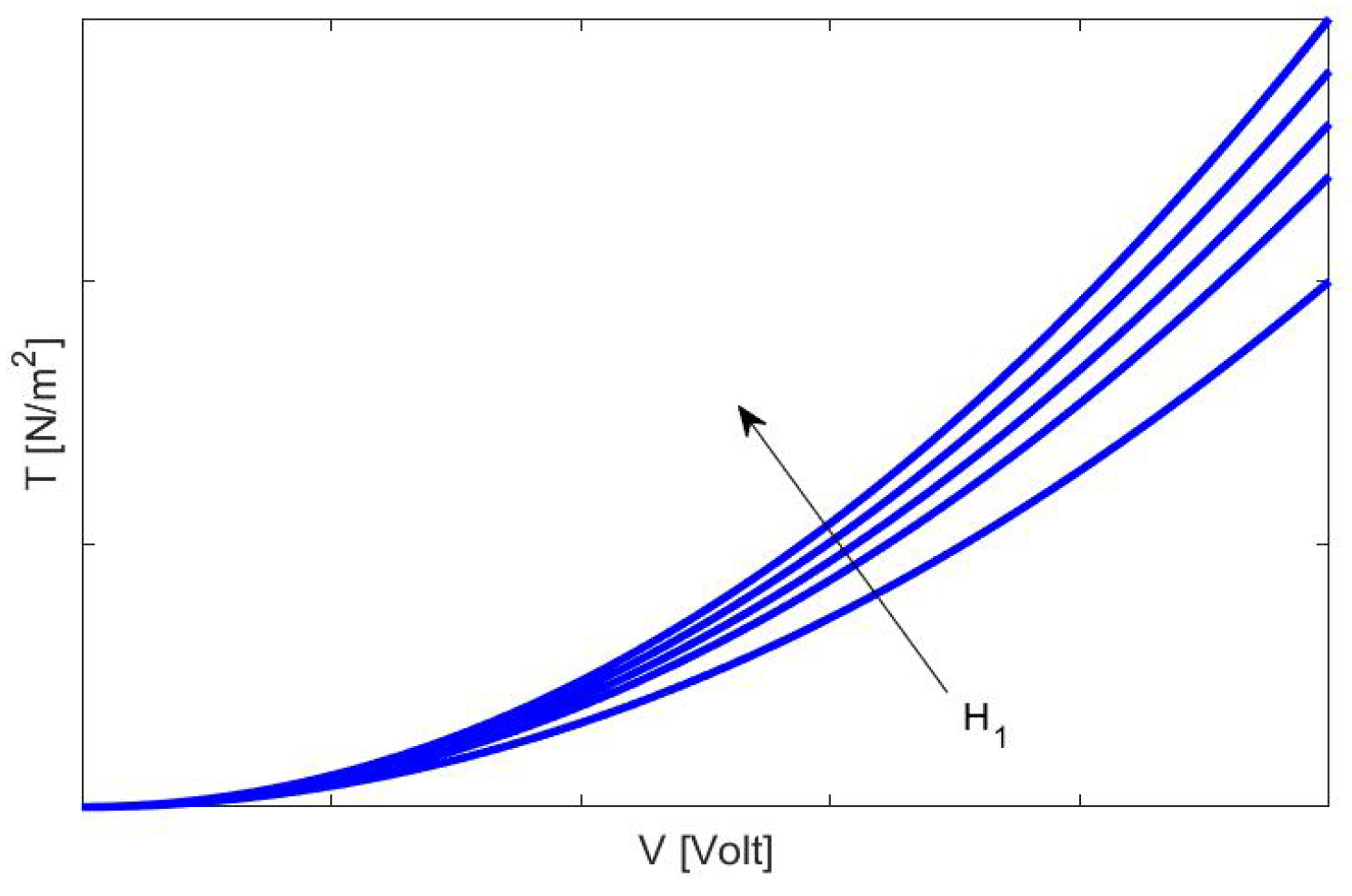
decreases as required physically. To further confirm the applicability of (
52) in industrial applications [
39,
40], when increasing
V,
also increases. We finally note that, since
, and in our case (no longer dimensionless)
and
, from (
52), we achieve a limitation for
highlighting, once again, that the increase of
T causes a decrease in the effects due to the fringing field.
Remark 12. According to Section 5.3, is a bounded function such that , so that (53) is valid. Remark 13. While it appears that (44) does not depend on δ, (53) ensures that T limits where δ exists. Remark 14. Both (52) and (53) confirm the important experimental issue according to which the effect due to depends on . Particularly, if , the effects due to the will be significantly reduced (as experimentally verified in [41,42]). 10. On the Influence of the Properties of the Deformable Plate on the Proposed Procedure
As verified, obtaining the limitations for
T and
V depend on the electro-mechanical properties of the material constituting the deformable plate (presence of both
and
) influencing the concavity of
, highlighting that the increments of
T reduce the amplitudes of
. On the other hand, the increase of
T produces smaller deformations at the edges. Furthermore, the numerical approach depends on the above parameters which, in a certain sense, govern the convergence. Finally, as in [
27], these electro-mechanical properties influence the choice of
T starting from
V, and vice versa. Particularly, the presence of
T in the denominator in the limitation of
V strongly influences
, and therefore
total which, through (
1), affects
(higher order curvatures of the deformable plate); thus, the greater the
T, the lower the concavity of the deformable plate (also confirming that plates that are more mechanically resistant show reduced deformations at the edges). Furthermore,
in (
19), (
20), and (
21) ensure that
T also influences the algebraic conditions of existence and uniqueness of the solution for (
1).
We highlight that the numeric procedure depends on
,
, and
, which govern the convergence of the method obtaining
which satisfy (
19), (
20), and (
21). Finally, by (
53), it becomes clear that both
V and
T act effectively on
. In other words, both the intended use of the device and the mechanical properties of the deformable plate affect the behavior of the device. To summarize, the model studied is more versatile than other simplified models where the intended use of the device imposed
T and vice versa.
11. Possible Intended Uses of the MEMS under Study
Industrially, the device presented here does not require particular construction requirements, and therefore the production costs would be low. Furthermore, both (
45) and (
46) ensure that the device is usable for a wide range of industrial applications (i.e., biomedical applications, micro-pumps for intravenous drug administration, and surgical micro-systems). Obviously, the exact value of
V strictly determines the intended use of the device.
Nowadays, parallel plate devices are industrially widespread, especially when their use is integrated in further electro-mechanical devices. However, even if the electronic tests on MEMS have reached high levels of reliability, the mechanical tests still do not present similarly high levels of performance. Despite this, in recent years, the joint use of electronic and mechanical components mounted on a single chip has allowed very high performances of micro-sensors used in robotics and electronics for use, for example, in large metropolitan areas/Smart Cities.
12. Concerning the Pull-In Voltage and Electrostatic Pressure
In MEMS, applying
V, is its deformable element. However, high values of
V (beyond the “pull-in” value) generates instability, because the electrostatic forces exceed the elastic ones (a potentially destructive phenomenon). In other words, from (
3), if
(with
, pull-in value), (
1) does not admit solutions. Conversely, if
the solution for (
1) exists. As known in the literature,
has been proved both mathematically [
1] and experimentally [
45,
46,
47]. Particularly, following the approach proposed in [
27], we plot the trends of
(maximum deflection of the deformable plate) versus
(starting from
, there will be a value of
, indicated with
below which there are two solutions while above there is no solution, thus
represents the bifurcation point).
Figure 11 depicts the rends of
, both without fringing field (
) and with it (
), respectively. Both trends highlight the superimposition with experimentally obtained bifurcation diagrams [
45]. In fact, in non dimensionless conditions, the pull-in voltage,
, depending on the gap between the two plates, is displayed in
Figure 12 whose trend is completely similar to those displayed in
Figure 6 in [
45] and
Figure 6 in [
48] where an experimental setup, consisting of two plates separated by a distance
d (each plate was acrylic sheet coated with conductive aluminum) highlighting that (
1), even if referred to a simplified geometry, in terms of pull-in voltage, has a well-established experimental confirmation in the literature.
This important experimental finding is confirmed by the fact that, from (
3), it is easy to achieve
which is completely analogous to (11) achieved in [
45]. In addition, (
74) is still analogous to (3) in [
49] where a MEMS switch with perforated serpentine (Au) was designed, simulated, fabricated and characterized. Not last, (
74) is quite similar to (1) in [
48] where an electrostatic MEMS with parallel plates was considered.
We also note that, from (
45), we can write:
Therefore, considering the usual values for each parameter, we achieve
, with the consequence that the obtained
is compatible with the experimental setups known in the literature. Particularly,
Table 3, after fixing the geometry of the device and varying the material constituting the deformable plate as in [
49], reports the values of
achieved which result similar to those obtained in [
49].
As already highlighted, the effects due to the fringing field depend on the aspect ratio
. Then, the pull-in voltage is also affected by this relationship.
Figure 13 and
Figure 14 highlight, for aspect ratio
, the trends of
using both the numerical procedure used in [
45] and with the procedure proposed here. It should be noted that the
d increase produces a deviation from the trend obtained using [
45], while agreeing with the experimental trend (as also highlighted in [
45]). So, once again, we highlight the adherence of the theoretical results discussed in this paper (Deriving from (
1)) with important experiments of electrostatic deflections.
Finally, from (
51), the electrostatic pressure due to
can be written as:
which, combined with (
74), provide the link between
and
that produce the following trend (as shown in
Figure 15):
Quite similar to that obtained in [
50], concluding once again that (
1) is in line with many important experimental results already known in the literature.
Remark 21. We observe that, as discussed in Section 12, the results obtained are mainly comparable with experimental setups obtained on electrostatic membrane MEMS devices. This is due to the fact that the global existence and uniqueness conditions for (1) have been obtained starting from (31) (reference energy state), which models an electrostatic membrane MEMS device with fringing field. Furthermore, the hypothesis of small displacements, together with the fact that β and γ in (1), do not vary during the deformation, the results for (1) agree with the experimental setups for membrane devices. In the near future, we hope to use β and γ variables to extend the comparison to further experimental setups. Remark 22. Regarding the possible experimental confirmation of the results achieved for T, Figure 12 depicts the link obtained between the pull-in voltage and the distance between the plates of the device. This link was found to be superimposable to experimental links known in the literature. Therefore, by (74), also T, indirectly, is verified experimentally. 13. Conclusions and Perspectives
In this paper, a dimensionless fourth-order integro-differential model known in the literature was considered while modeling the behavior of an electrostatic MEMS device with metal parallel plates in which the effects due to the fringing field are modeled, according to the Pelesko–Driscoll theory, by means of an easily implementable addend via software/hardware whose weight can be controlled in voltage (parameter ). This model was formalized so that the device can be controlled in voltage by a suitable capacitive control circuit. Starting from the conditions of global existence and uniqueness, the analytical results were discussed, highlighting the most important and captivating implications for our industrial realities. In particular, the choice of a particular dielectric profile of the deformable plate (satisfying mandatory physical requirements) led to obtaining important limitations for the external electrical voltage, for the mechanical tension of the deformable plate, and for the total electrostatic force (including the contribution due to the fringing field) highlighting relevant adherence with experimental evidence known in the literature. It is undoubtedly worth noting that both the limitations for V and for T allow you to reconstruct profiles (model solutions) in complete safety. In other words, once a particular device is fixed (i.e., by fixing T of the material constituting the deformable plate), the external V applied satisfying the above limitations, it will allow profiles of the deformable plate complying with the safety standards according to which the deformable element must not touch the upper wall of the device. Conversely, by selecting the intended use of the device (i.e., V satisfying the above limitations), it is possible to choose a particular material for the deformable plate (whose T satisfies the relative limitation) capable of guaranteeing solutions of high security. Since the model does not allow the explicit recovering of the deformable plate, a numerical technique based on finite differences (the “gold standard” for this particular type of analytical models) was used to obtain profiles that are fully compatible with the conditions of global existence and uniqueness. Furthermore, a simple criterion for choosing the intended use has been provided, beginning with the mechanical tension of the deformable plate and vice versa, which can be particularly useful for industrial applications. In particular, the high value of allows the device studied to be used also in intended uses where V would be high (industrial applications that require up to Class 3B micro devices (characterized by high fault electrical voltage) according to the ESD/CEI classification). Furthermore, the direct dependence of on T allows us to confirm what is required by the industry according to which the device characterized by a deformable plate with high rigidity allows uses with an even higher (with profiles such as not to compromise the functionality of the device). The quality of the results obtained was also confirmed by comparison with experimental setups known in the literature, highlighting that the hypothesis of small displacements, together with the non-variability of some mechanical parameters during the deformation of the plate, allows an exhaustive comparison of performing models of electrostatic devices membrane, which are famously easier to implement. Thus, the possibility emerges of opening a new line of research into comparisons between complete (but difficult to implement) models and simplified models representing devices that are well-suited to experimental performances. We underline that the model, being an ordinary derivative one, does not lend itself to being solved using FEM techniques (particularly suitable for dynamic partial derivative models). Therefore, it is necessary to reformulate the model in the near future so that its most important dynamic aspects are considered (including the dependence on electrical conductivity and temperature), on one hand, to obtain the more general conditions of global existence and uniqueness, and, on the other, to proceed with the recovering of the deformable profile using FEM techniques (performing for software/hardware applications).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}