
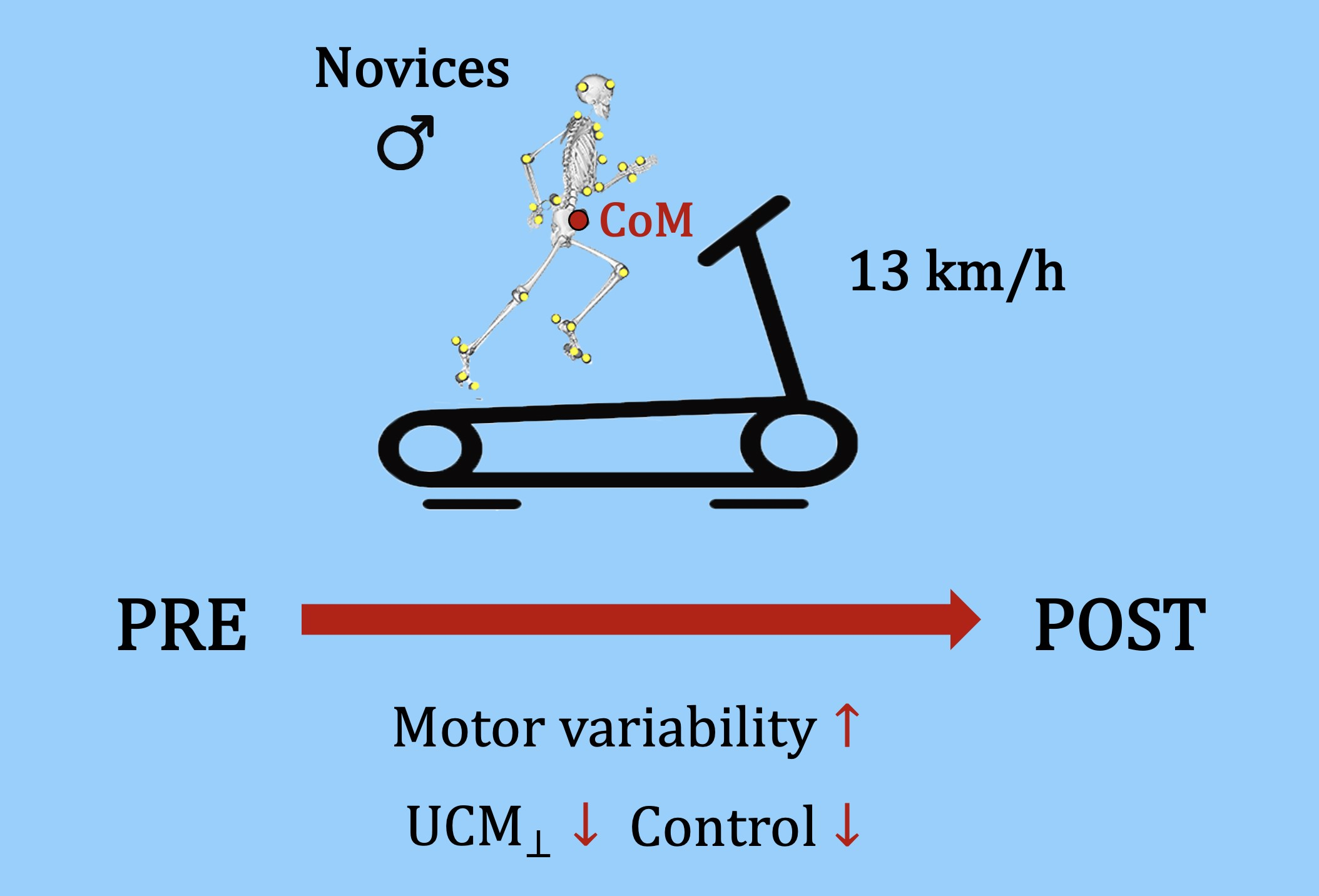
Running-Induced Fatigue Changes the Structure of Motor Variability in Novice Runners


Abstract
:Simple Summary
Abstract

1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Protocol
2.3. Data Collection and Processing
2.4. Uncontrolled Manifold Approach
2.5. Statistics
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baldwin, B. The State of Running. Available online: https://racemedicine.org/the-state-of-running-2019/ (accessed on 26 September 2021).
- Hoogkamer, W.; Kipp, S.; Spiering, B.A.; Kram, R. Altered running economy directly translates to altered distance-running performance. Med. Sci. Sports Exerc. 2016, 48, 2175–2180. [Google Scholar] [CrossRef]
- Apte, S.; Prigent, G.; Stöggl, T.; Martínez, A.; Snyder, C.; Gremeaux-Bader, V.; Aminian, K. Biomechanical Response of the Lower Extremity to Running-Induced Acute Fatigue: A Systematic Review. Front. Physiol. 2021, 12, 646042. [Google Scholar] [CrossRef] [PubMed]
- Kemler, E.; Blokland, D.; Backx, F.; Huisstede, B. Differences in injury risk and characteristics of injuries between novice and experienced runners over a 4-year period. Phys. Sportsmed. 2018, 46, 485–491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abt, J.; Sell, T.; Chu, Y.; Lovalekar, M.; Burdett, R.; Lephart, S. Running Kinematics and Shock Absorption Do Not Change after Brief Exhaustive Running. J. Strength Cond. Res. 2011, 25, 1479–1485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Derrick, T.R.; Dereu, D.; Mclean, S.P. Impacts and kinematic adjustments during an exhaustive run. Med. Sci. Sports Exerc. 2002, 34, 998–1002. [Google Scholar] [CrossRef]
- Girard, O.; Millet, G.P.; Slawinski, J.; Racinais, S.; Micallef, J.P. Changes in running mechanics and spring-mass behaviour during a 5-km time trial. Int. J. Sports Med. 2013, 34, 832–840. [Google Scholar] [CrossRef]
- Koblbauer, I.F.; van Schooten, K.S.; Verhagen, E.A.; van Dieën, J.H. Kinematic changes during running-induced fatigue and relations with core endurance in novice runners. J. Sci. Med. Sport 2014, 17, 419–424. [Google Scholar] [CrossRef]
- Mizrahi, J.; Verbitsky, O.; Isakov, E. Fatigue-related loading imbalance on the shank in running: A possible factor in stress fractures. Ann. Biomed. Eng. 2000, 28, 463–469. [Google Scholar] [CrossRef]
- Mo, S.; Chow, D.H.K. Differences in lower-limb coordination and coordination variability between novice and experienced runners during a prolonged treadmill run at anaerobic threshold speed. J. Sports Sci. 2019, 37, 1021–1028. [Google Scholar] [CrossRef]
- Möhler, F.; Marahrens, S.; Ringhof, S.; Mikut, R.; Stein, T. Variability of running coordination in experts and novices: A 3D uncontrolled manifold analysis. Eur. J. Sport Sci. 2020, 20, 1187–1196. [Google Scholar] [CrossRef]
- Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Tröster, G. Monitoring kinematic changes with fatigue in running using body-worn sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Rabita, G.; Slawinski, J.; Girard, O.; Bignet, F.; Hausswirth, C. Spring-mass behavior during exhaustive run at constant velocity in elite triathletes. Med. Sci. Sports Exerc. 2011, 43, 685–692. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rabita, G.; Couturier, A.; Dorel, S.; Hausswirth, C.; Le Meur, Y. Changes in spring-mass behavior and muscle activity during an exhaustive run at VO2max. J. Biomech. 2013, 46, 2011–2017. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- García-Pinillos, F.; Cartón-Llorente, A.; Jaén-Carrillo, D.; Delgado-Floody, P.; Carrasco-Alarcón, V.; Martínez, C.; Roche-Seruendo, L.E. Does fatigue alter step characteristics and stiffness during running? Gait Posture 2020, 76, 259–263. [Google Scholar] [CrossRef]
- van Oeveren, B.T.; de Ruiter, C.J.; Beek, P.J.; van Dieën, J.H. The biomechanics of running and running styles: A synthesis. Sport. Biomech. 2021, 4, 1–39. [Google Scholar] [CrossRef]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Simonetti, E.; Bergamini, E.; Vannozzi, G.; Bascou, J.; Pillet, H. Estimation of 3D Body Center of Mass Acceleration and Instantaneous Velocity from a Wearable Inertial Sensor Network in Transfemoral Amputee Gait: A Case Study. Sensors 2021, 21, 3129. [Google Scholar] [CrossRef]
- Ernst, M.; Götze, M.; Müller, R.; Blickhan, R. Vertical adaptation of the center of mass in human running on uneven ground. Hum. Mov. Sci. 2014, 38, 293–304. [Google Scholar] [CrossRef]
- Möhler, F.; Fadillioglu, C.; Stein, T. Changes in Spatiotemporal Parameters, Joint and CoM Kinematics and Leg Stiffness in Novice Runners During a High-Intensity Fatigue Protocol. PLoS ONE 2022, 17, e0265550. [Google Scholar] [CrossRef]
- Möhler, F.; Fadillioglu, C.; Stein, T. Fatigue-Related Changes in Spatiotemporal Parameters, Joint Kinematics and Leg Stiffness in Expert Runners During a Middle-Distance Run. Front. Sport. Act. Living 2021, 3, 23. [Google Scholar] [CrossRef]
- Bernstein, N.A. The Co-Ordination and Regulation of Movements, 1st ed.; Pergamon Press Ltd.: Oxford, UK, 1967. [Google Scholar]
- Latash, M.L.; Scholz, J.P.; Schöner, G. Toward a New Theory of Motor Synergies. Motor Control 2007, 11, 276–308. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scholz, J.P.; Schöner, G. The uncontrolled manifold concept: Identifying control variables for a functional task. Exp. Brain Res. 1999, 126, 289–306. [Google Scholar] [CrossRef] [PubMed]
- Latash, M.L.; Scholz, J.P.; Schöner, G. Motor Control Strategies Revealed in the Structure of Motor Variability. Exerc. Sport Sci. Rev. 2002, 30, 26–31. [Google Scholar] [CrossRef] [PubMed]
- Möhler, F.; Ringhof, S.; Debertin, D.; Stein, T. Influence of fatigue on running coordination: A UCM analysis with a geometric 2D model and a subject-specific anthropometric 3D model. Hum. Mov. Sci. 2019, 66, 133–141. [Google Scholar] [CrossRef] [PubMed]
- Black, D.P.; Smith, B.A.; Wu, J.; Ulrich, B.D. Uncontrolled manifold analysis of segmental angle variability during walking: Preadolescents with and without Down syndrome. Exp. Brain Res. 2007, 183, 511–521. [Google Scholar] [CrossRef] [PubMed]
- Qu, X. Uncontrolled manifold analysis of gait variability: Effects of load carriage and fatigue. Gait Posture 2012, 36, 325–329. [Google Scholar] [CrossRef] [PubMed]
- Reisman, D.S.; Scholz, J.P.; Schöner, G. Coordination underlying the control of whole body momentum during sit-to-stand. Gait Posture 2002, 15, 45–55. [Google Scholar] [CrossRef]
- Verrel, J.; Pradon, D.; Vuillerme, N. Persistence of Motor-Equivalent Postural Fluctuations during Bipedal Quiet Standing. PLoS ONE 2012, 7, e48312. [Google Scholar] [CrossRef] [Green Version]
- Singh, T.; SKM, V.; Zatsiorsky, V.M.; Latash, M.L. Fatigue and Motor Redundancy: Adaptive Increase in Finger Force Variance in Multi-Finger Tasks. J. Neurophysiol. 2010, 103, 2990–3000. [Google Scholar] [CrossRef] [Green Version]
- Singh, T.; Zatsiorsky, V.M.; Latash, M.L. Contrasting effects of fatigue on multifinger coordination in young and older adults. J. Appl. Physiol. 2013, 115, 456–467. [Google Scholar] [CrossRef] [Green Version]
- Hasanbarani, F.; Yang, C.; Bailey, C.A.; Slopecki, M.; Côté, J.N. Sex-specific effects of a repetitive fatiguing task on stability: Analysis with motor equivalence model. J. Biomech. 2021, 129, 110769. [Google Scholar] [CrossRef] [PubMed]
- Jones, A.M.; Doust, J.H. A 1% treadmill grade most accurately reflects the energetic cost of outdoor running. J. Sports Sci. 1996, 14, 321–327. [Google Scholar] [CrossRef] [PubMed]
- Matsas, A.; Taylor, N.; McBurney, H. Knee joint kinematics from familiarised treadmill walking can be generalised to overground walking in young unimpaired subjects. Gait Posture 2000, 11, 46–53. [Google Scholar] [CrossRef]
- Lavcanska, V.; Taylor, N.F.; Schache, A.G. Familiarization to treadmill running in young unimpaired adults. Hum. Mov. Sci. 2005, 24, 544–557. [Google Scholar] [CrossRef] [PubMed]
- Borg, G.A. Psychophysical bases of perceived exertion. Med. Sci. Sports Exerc. 1982, 14, 377–381. [Google Scholar] [CrossRef] [PubMed]
- Härtel, T.; Hermsdorf, H. Biomechanical modelling and simulation of human body by means of DYNAMICUS. J. Biomech. 2006, 39, 549. [Google Scholar] [CrossRef]
- Leitch, J.; Stebbins, J.; Paolini, G.; Zavatsky, A.B. Identifying gait events without a force plate during running: A comparison of methods. Gait Posture 2011, 33, 130–132. [Google Scholar] [CrossRef]
- Latash, M.L.; Levin, M.; Scholz, J.P.; Schöner, G. Motor control theories and their applications. Medicina 2010, 46, 382. [Google Scholar] [CrossRef] [Green Version]
- Rosenblatt, N.J.; Hurt, C.P. Recommendation for the minimum number of steps to analyze when performing the uncontrolled manifold analysis on walking data. J. Biomech. 2019, 85, 218–223. [Google Scholar] [CrossRef]
- Papi, E.; Rowe, P.J.; Pomeroy, V.M. Analysis of gait within the uncontrolled manifold hypothesis: Stabilisation of the centre of mass during gait. J. Biomech. 2015, 48, 324–331. [Google Scholar] [CrossRef] [Green Version]
- Tawy, G.F.; Rowe, P.; Biant, L. Gait variability and motor control in patients with knee osteoarthritis as measured by the uncontrolled manifold technique. Gait Posture 2018, 59, 272–277. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vito, M.; Tropea, P.; Rinaldi, L.A.; Micera, S. Uncontrolled manifold hypothesis: Organization of leg joint variance in humans while walking in a wide range of speeds. Hum. Mov. Sci. 2018, 57, 227–235. [Google Scholar] [CrossRef]
- Lofrumento, M.; Picardi, M.; Monaco, V.; Micera, S.; Corbo, M.; Tropea, P. Assessment of motor coordination in stroke patients using UCM theory. Gait Posture 2019, 74, 24. [Google Scholar] [CrossRef]
- Robertson, D.G.E.; Caldwell, G.E.; Hamill, J.; Kamen, G.; Whittlesey, S.N. Research Methods in Biomechanics, 2nd ed.; Human Kinetics: Champaign, IL, USA, 2004; ISBN 0-7360-3966-X. [Google Scholar]
- Sternad, D.; Park, S.-W.; Müller, H.; Hogan, N. Coordinate Dependence of Variability Analysis. PLoS Comput. Biol. 2010, 6, e1000751. [Google Scholar] [CrossRef] [PubMed]
- BenSaïda, A. Shapiro-Wilk and Shapiro-Francia Normality Tests. Available online: https://www.mathworks.com/matlabcentral/fileexchange/13964-shapiro-wilk-and-shapiro-francia-normality-tests (accessed on 26 September 2021).
- Pataky, T.C.; Vanrenterghem, J.; Robinson, M.A.; Liebl, D. On the validity of statistical parametric mapping for nonuniformly and heterogeneously smooth one-dimensional biomechanical data. J. Biomech. 2019, 91, 114–123. [Google Scholar] [CrossRef]
- da Rosa, R.G.; Oliveira, H.B.; Gomeñuka, N.A.; Masiero, M.P.B.; da Silva, E.S.; Zanardi, A.P.J.; de Carvalho, A.R.; Schons, P.; Peyré-Tartaruga, L.A. Landing-Takeoff Asymmetries Applied to Running Mechanics: A New Perspective for Performance. Front. Physiol. 2019, 10, 415. [Google Scholar] [CrossRef]
- Nordin, A.D.; Dufek, J.S. Reviewing the Variability-Overuse Injury Hypothesis: Does Movement Variability Relate to Landing Injuries? Res. Q. Exerc. Sport 2019, 90, 190–205. [Google Scholar] [CrossRef]
- Hunter, I.; Smith, G. Preferred and optimal stride frequency, stiffness and economy: Changes with fatigue during a 1-h high-intensity run. Eur. J. Appl. Physiol. 2007, 100, 653–661. [Google Scholar] [CrossRef]
- Richmond, S.B.; Fling, B.W.; Lee, H.; Peterson, D.S. The assessment of center of mass and center of pressure during quiet stance: Current applications and future directions. J. Biomech. 2021, 123, 110485. [Google Scholar] [CrossRef]
- Scholz, J.P.; Schöner, G.; Hsu, W.L.; Jeka, J.J.; Horak, F.; Martin, V. Motor equivalent control of the center of mass in response to support surface perturbations. Exp. Brain Res. 2007, 180, 163–179. [Google Scholar] [CrossRef]
- Freitas, S.M.S.F.; de Freitas, P.B.; Lewis, M.M.; Huang, X.; Latash, M.L. Quantitative analysis of multi-element synergy stabilizing performance: Comparison of three methods with respect to their use in clinical studies. Exp. Brain Res. 2019, 237, 453–465. [Google Scholar] [CrossRef] [PubMed]
- Pawłowski, M.; Furmanek, M.; Sobota, G.; Marszałek, W.; Kajetan, S.; Bacik, B.; Juras, G. Number of Trials Necessary to Apply Analysis within the Framework of the Uncontrolled Manifold Hypothesis at Different Levels of Hierarchical Synergy Control. J. Hum. Kinet. 2021, 76, 131–143. [Google Scholar] [CrossRef] [PubMed]
- Schütte, K.; Seerden, S.; Venter, R.; Vanwanseele, B. Influence of outdoor running fatigue and medial tibial stress syndrome on accelerometer-based loading and stability. Gait Posture 2018, 59, 222–228. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
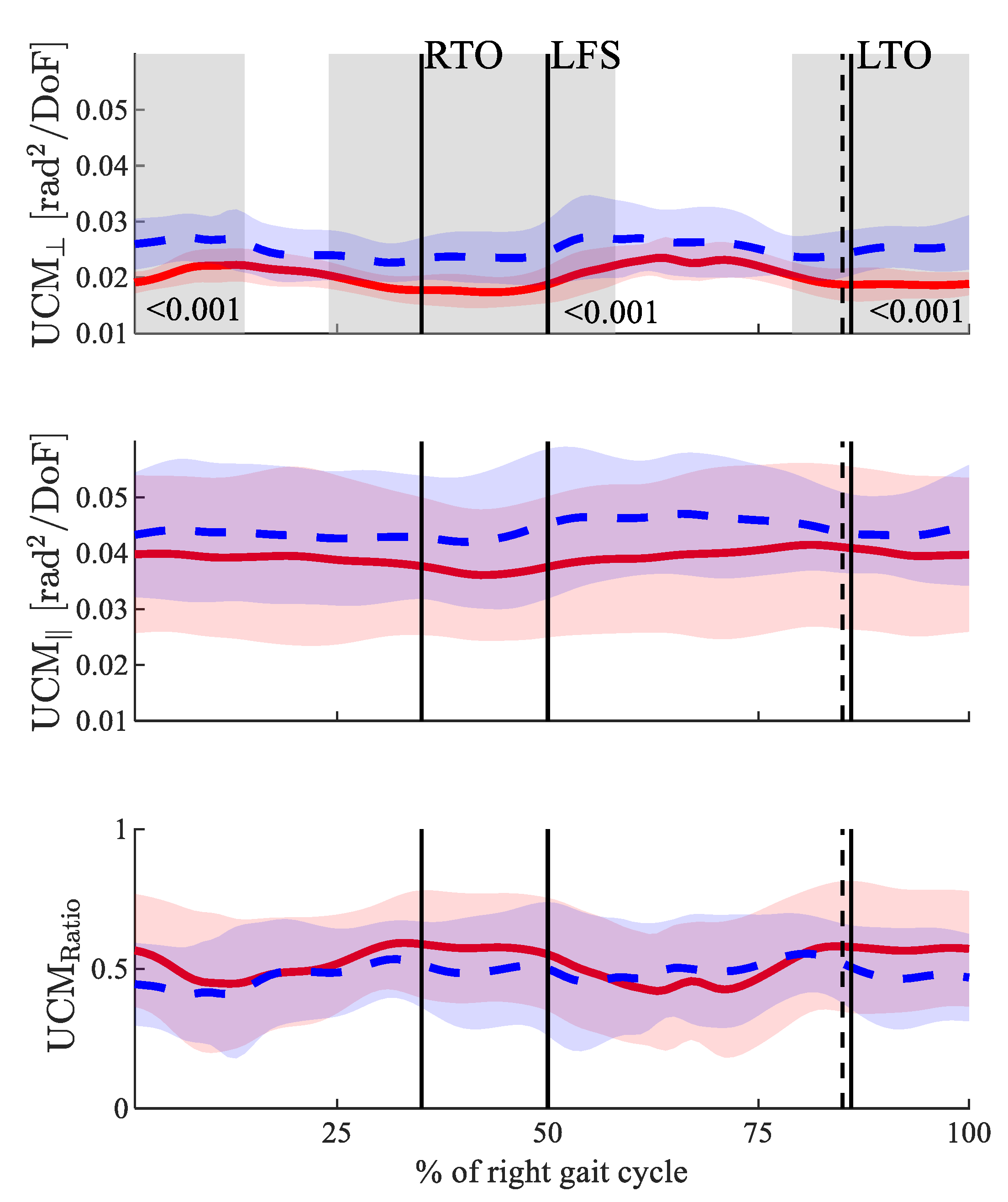
| Dependent Parameter | Phase | ΔPre-Post | p | |
|---|---|---|---|---|
| UCMꓕ | BP | 0.005 ± 0.003 | 0.523 | 0.055 |
| PP | 0.004 ± 0.004 | 0.362 | 0.204 | |
| FP | 0.006 ± 0.003 | 0.573 | 0.032 | |
| UCM‖ | BP | 0.006 ± 0.011 | 0.222 | 0.445 |
| PP | 0.005 ± 0.011 | 0.267 | 0.356 | |
| FP | 0.005 ± 0.012 | 0.301 | 0.296 | |
| UCMRatio | BP | −0.032 ± 0.138 | 0.007 | 0.982 |
| PP | 0.002 ± 0.141 | 0.173 | 0.555 | |
| FP | −0.080 ± 0.124 | 0.139 | 0.635 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Möhler, F.; Fadillioglu, C.; Scheffler, L.; Müller, H.; Stein, T. Running-Induced Fatigue Changes the Structure of Motor Variability in Novice Runners. Biology 2022, 11, 942. https://doi.org/10.3390/biology11060942
Möhler F, Fadillioglu C, Scheffler L, Müller H, Stein T. Running-Induced Fatigue Changes the Structure of Motor Variability in Novice Runners. Biology. 2022; 11(6):942. https://doi.org/10.3390/biology11060942
Chicago/Turabian StyleMöhler, Felix, Cagla Fadillioglu, Lucia Scheffler, Hermann Müller, and Thorsten Stein. 2022. "Running-Induced Fatigue Changes the Structure of Motor Variability in Novice Runners" Biology 11, no. 6: 942. https://doi.org/10.3390/biology11060942