
IoT-Enabled Precision Agriculture: Developing an Ecosystem for Optimized Crop Management

 , , , ,
, , , ,  , , , and
, , , and
Abstract
:1. Introduction
2. Related Works
3. Overview of Precision Agriculture
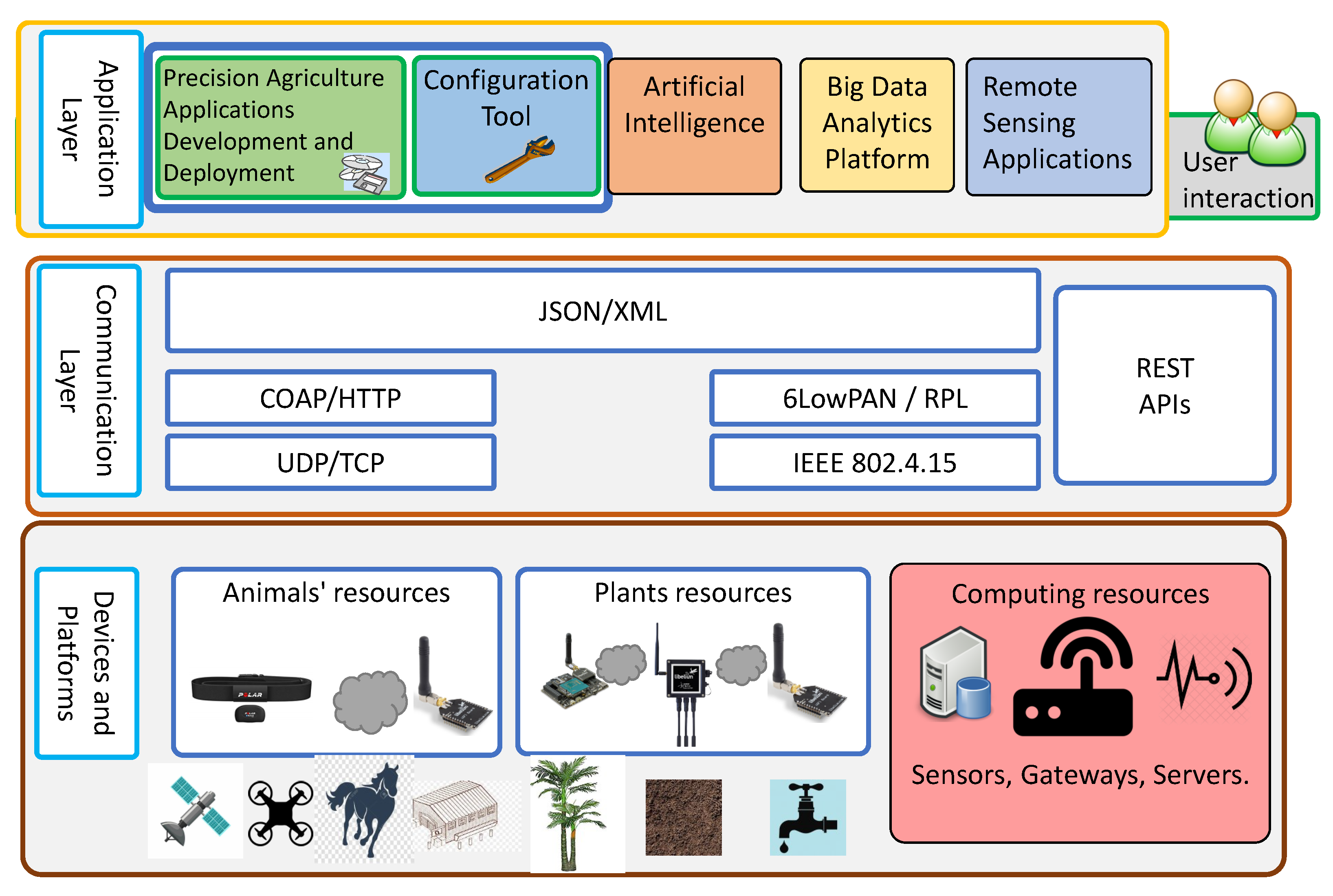
3.1. The Proposed System Model
- 1.
- Real-time monitoring: The proposed system allows farmers to monitor their crops and livestock in real time, which enables them to take prompt action in case of any abnormalities or issues.
- 2.
- Automated decision making: The system uses data analysis to provide farmers with insights and recommendations for optimizing their operations, such as determining the ideal time for planting or harvesting or identifying the best feeding and watering schedule for their livestock.
- 3.
- Reduced labor costs: The system allows farmers to automate many of their tasks, such as irrigation and pest control, which reduces the need for labor-intensive manual work.
- 4.
- Improved crop and animal health: The system allows farmers to monitor the health of their crops and animals more closely, which enables them to identify and address issues more quickly.
- 5.
- Increased yield and revenue: By using precision agriculture techniques, farmers can improve their crop yields and animal health, leading to increased revenue.
- 6.
- Resource optimization: The proposed system can also help farmers optimize their use of resources, such as water and fertilizers, which can reduce costs and minimize environmental impact.
- I.
- The application layer includes user applications, data analysis, and dashboards used to monitor and optimize precision operations. The Big Data and analytics module consist of a data warehouse storage, which runs at the application layer. This component contains the technology and services necessary to integrate and archive data from multiple sensors and applications, enabling the IoT system to derive and deliver value from its data assets.
- II.
- The communication layer offers real-time connectivity and enables communication between devices and platforms. This includes sensors to sensors, sensors to gateways, and gateways to servers within the IoT ecosystem. The framework combines several heterogeneous communication technologies, such as IEEE 802.4.15, 6lowPAN, and COAP.
- III.
- The devices and platforms layer is the foundation of the IoT ecosystem infrastructure. These layers include system components such as sensors, gateways, and server platforms. Sensors are devices that capture the status information about physical world objects and convert them into digital data for transmission and processing. The main goal of the gateway’s platform is to aggregate heterogeneous data sources with different communication standards, given that an array of sensor devices is required to collect data about plants, water, environments, animals, and soil, among others. Servers host user applications and data repositories and provide unified access APIs for other systems and users.
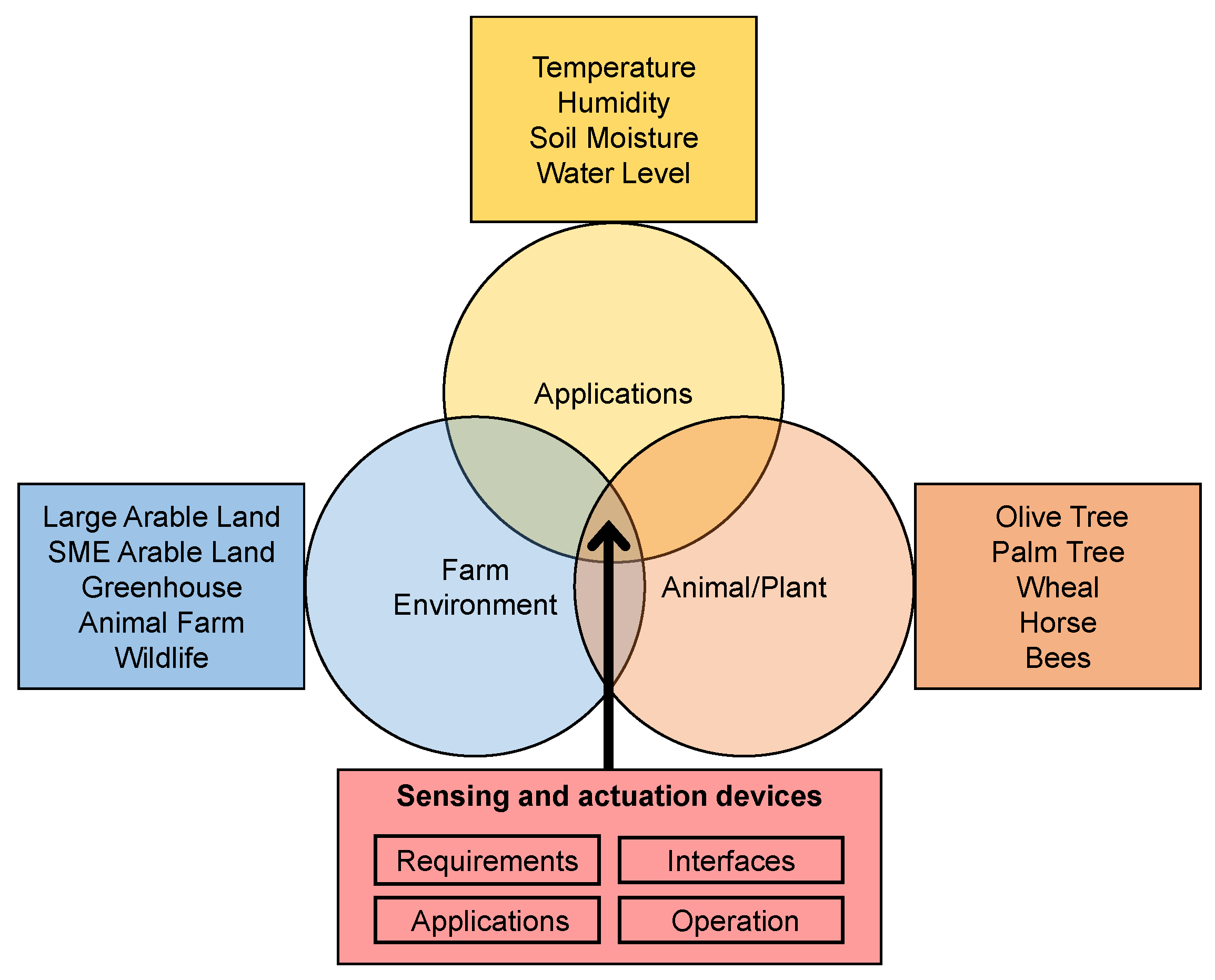
3.2. Precision Agriculture Applications
3.3. Communications Protocols
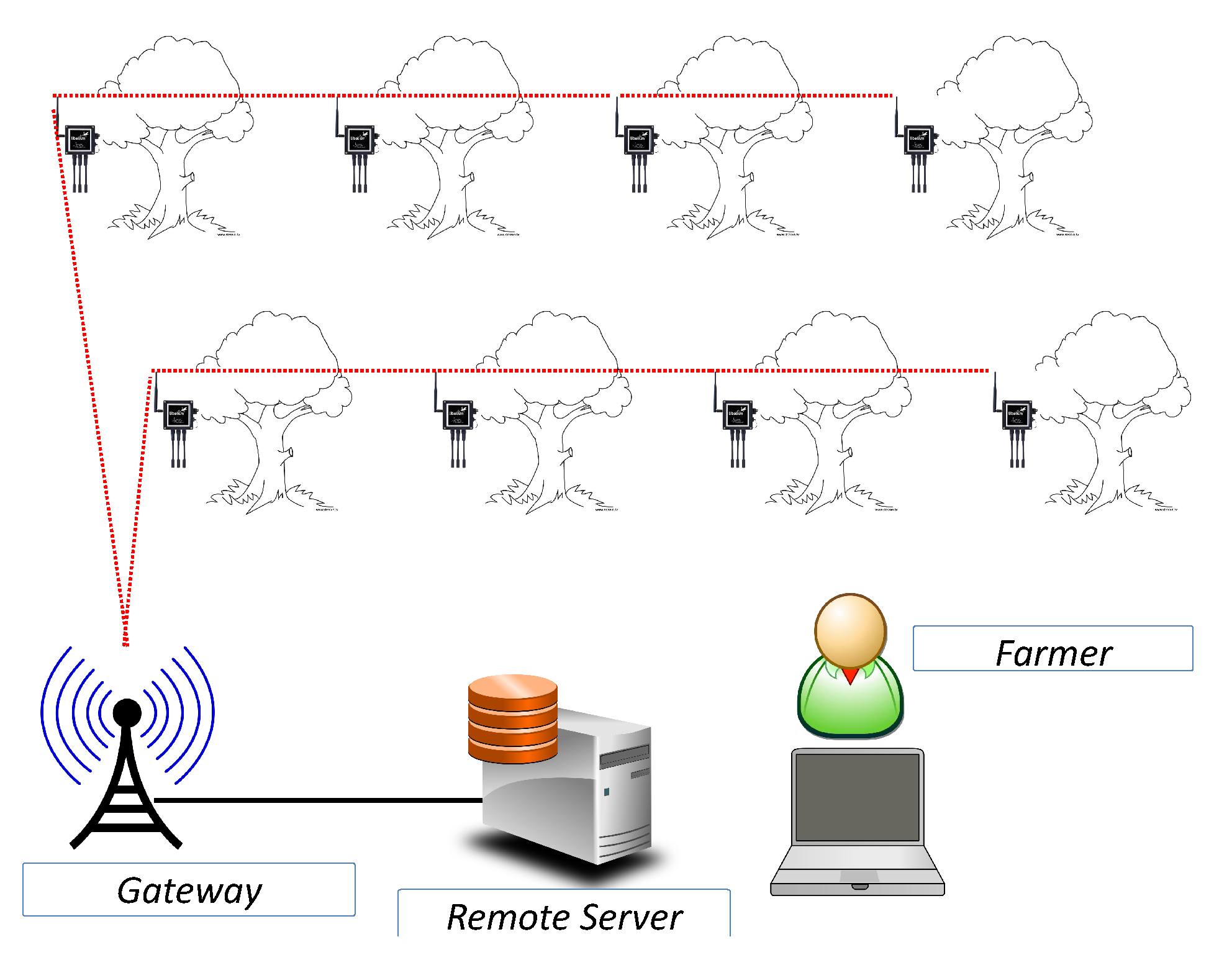
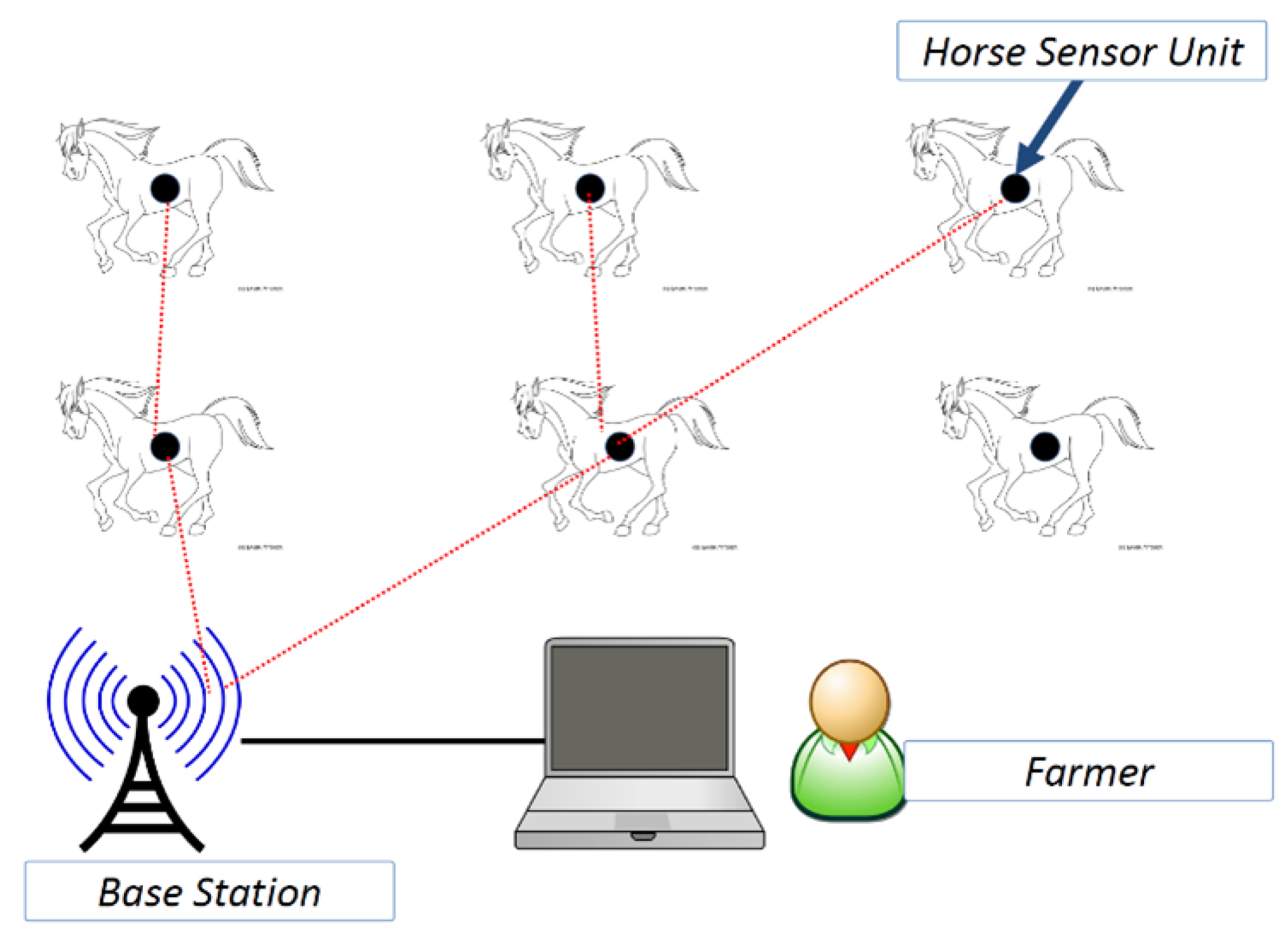
3.4. Devices and Platforms
4. Experiments and Simulation
4.1. Simulation Software: Contiki and COOJA
4.2. Experiment Mobility Model for Both Scenarios
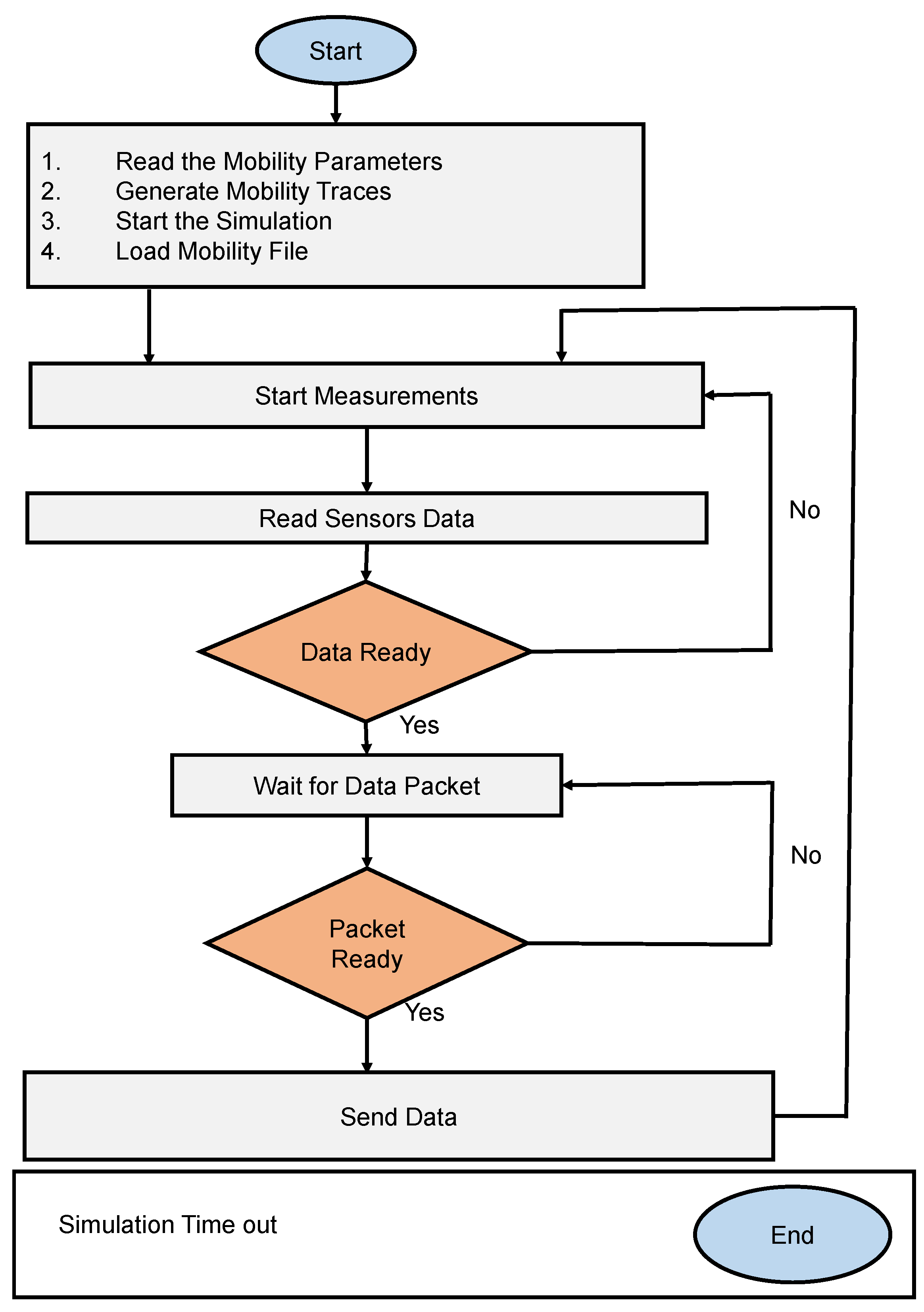
4.3. Simulation Flow Chart
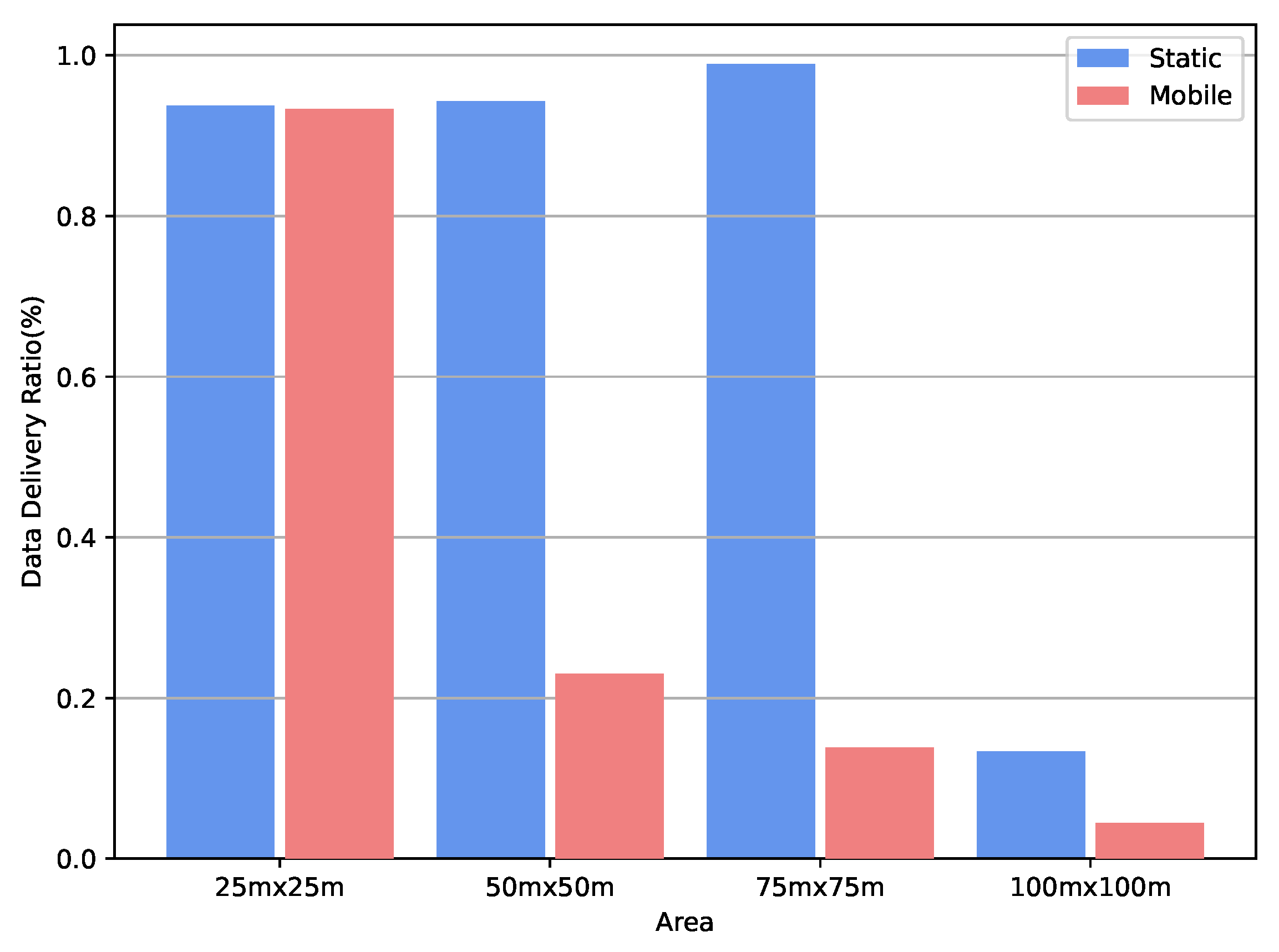
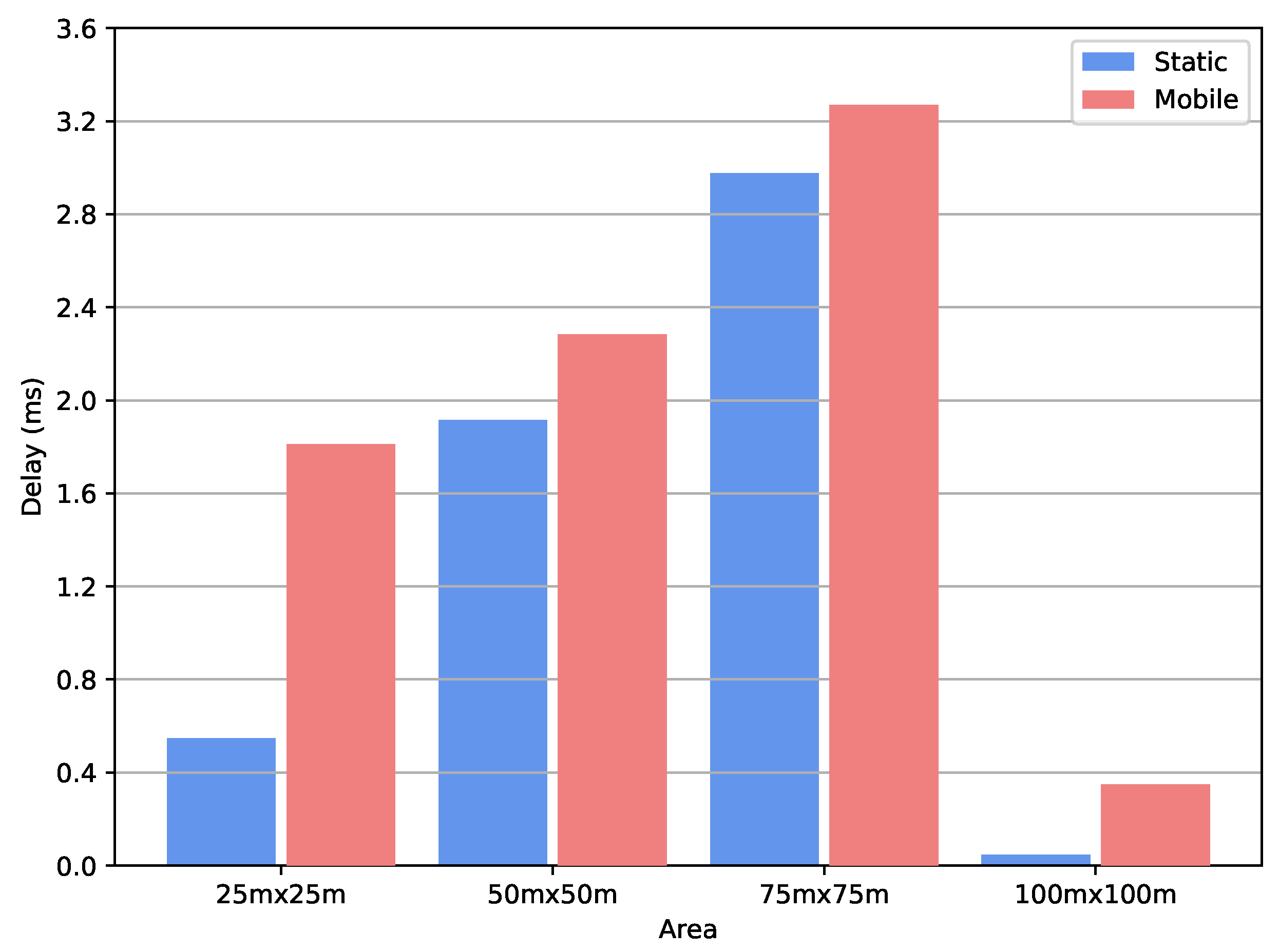
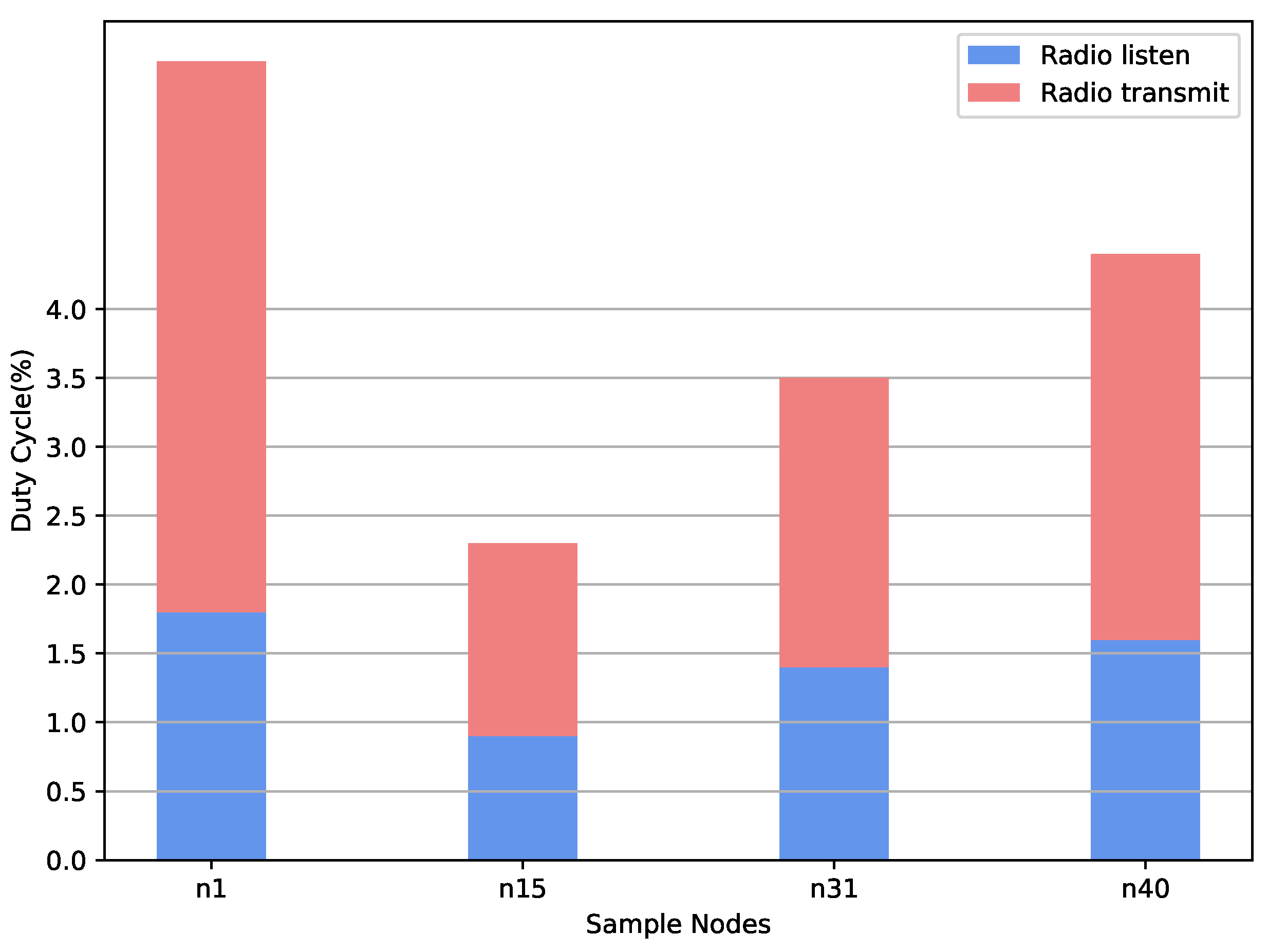
4.4. Data Analysis
5. Results Analysis and Discussion
6. Practical and Research Implications
7. Discussion
8. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Cao, Z.; Dong, W. Overview of edge computing in the agricultural Internet of Things: Key technologies, applications, challenges. IEEE Access 2020, 8, 141748–141761. [Google Scholar] [CrossRef]
- Ashton, K. That ‘Internet of Things’ thing. RFID J. 2009, 22, 97–114. [Google Scholar]
- Sreekantha, D.; Kavya, A. Agricultural crop monitoring using IOT-a study. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 5–6 January 2017; pp. 134–139. [Google Scholar]
- Aziz, K.; Tarapiah, S.; Alsaedi, M.; Ismail, S.H.; Atalla, S. Wireless sensor networks for road traffic monitoring. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 265–270. [Google Scholar] [CrossRef] [Green Version]
- El Hendy, M.; Atalla, S.; Miniaoui, S.; Daradkeh, M.; Mansoor, W.; Bin Hashim, K.F. Hybrid Approach for Developing Strategic ICT Framework for Smart Cities—A Case Study of Dubai’s Toll Gates (Salik). Smart Cities 2022, 5, 1554–1573. [Google Scholar] [CrossRef]
- Sanjeevi, P.; Prasanna, S.; Siva Kumar, B.; Gunasekaran, G.; Alagiri, I.; Vijay Anand, R. Precision agriculture and farming using Internet of Things based on wireless sensor network. Trans. Emerg. Telecommun. Technol. 2020, 31, e3978. [Google Scholar] [CrossRef]
- Arreaga, N.X.; Blanc, S.; Rivas, L.V.; Palanca, S. Implementation of choreography services for precision agriculture based on real-time monitoring and control system using WSN. J. Wirel. Commun. Netw. 2021, 2021, 1–20. [Google Scholar]
- Mahajan, H.B.; Badarla, A.; Junnarkar, A.A. CL-IoT: Cross-layer Internet of Things protocol for intelligent manufacturing of smart farming. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 7777–7791. [Google Scholar] [CrossRef]
- Zamora-Izquierdo, M.A.; Santa, J.; Martínez, J.A.; Martínez, V.; Skarmeta, A.F. Smart farming IoT platform based on edge and cloud computing. Biosyst. Eng. 2019, 177, 4–17. [Google Scholar] [CrossRef]
- Sun, Y.; Ding, W.; Shu, L.; Li, K.; Zhang, Y.; Zhou, Z.; Han, G. On enabling mobile crowd sensing for data collection in smart agriculture: A vision. IEEE Syst. J. 2021, 16, 132–143. [Google Scholar] [CrossRef]
- Sheng, R.T.C.; Huang, Y.H.; Chan, P.C.; Bhat, S.A.; Wu, Y.C.; Huang, N.F. Rice Growth Stage Classification via RF-Based Machine Learning and Image Processing. Agriculture 2022, 12, 2137. [Google Scholar] [CrossRef]
- Huang, T.W.; Bhat, S.A.; Huang, N.F.; Chang, C.Y.; Chan, P.C.; Elepano, A.R. Artificial intelligence-based real-time pineapple quality classification using acoustic spectroscopy. Agriculture 2022, 12, 129. [Google Scholar] [CrossRef]
- Nandyala, C.S.; Kim, H.K. Green IoT agriculture and healthcare application (GAHA). Int. J. Smart Home 2016, 10, 289–300. [Google Scholar] [CrossRef] [Green Version]
- Vangala, A.; Das, A.K.; Chamola, V.; Korotaev, V.; Rodrigues, J.J. Security in IoT-enabled smart agriculture: Architecture, security solutions and challenges. Clust. Comput. 2022, 1–24. [Google Scholar] [CrossRef]
- Abraham, A.; Dash, S.; Rodrigues, J.J.; Acharya, B.; Pani, S.K. AI, Edge and IoT-Based Smart Agriculture; Academic Press: Cambridge, MA, USA, 2021. [Google Scholar]
- Chen, Y.; Chanet, J.P.; Hou, K.M. RPL Routing Protocol a case study: Precision agriculture. In Proceedings of the First China-France Workshop on Future Computing Technology (CF-WoFUCT 2012), Harbin, China, 16–17 February 2012. [Google Scholar]
- Vasisht, D.; Kapetanovic, Z.; Won, J.; Jin, X.; Chandra, R.; Sinha, S.; Kapoor, A.; Sudarshan, M.; Stratman, S. FarmBeats: AnIoT Platform for Data-Driven Agriculture. In Proceedings of the 14th USENIX Symposium on Networked Systems Design and Implementation (NSDI 17), Boston, MA, USA, 27–29 March 2017; pp. 515–529. [Google Scholar]
- Cama-Pinto, D.; Holgado-Terriza, J.A.; Damas-Hermoso, M.; Gómez-Mula, F.; Cama-Pinto, A. Radio wave attenuation measurement system based on RSSI for precision agriculture: Application to tomato greenhouses. Inventions 2021, 6, 66. [Google Scholar] [CrossRef]
- Noda, A.; Fukuda, O.; Okumura, H.; Arai, K. Behavior analysis of a small animal using IoT sensor system. In Proceedings of the 2017 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Okinawa, Japan, 24–26 November 2017; pp. 9–10. [Google Scholar]
- Gordon, M.; Jerina, M.; Raub, R.; Davison, K.; Young, J.; Williamson, K. The effects of dietary manipulation and exercise on weight loss and related indices of health in horses. Comp. Exerc. Physiol. 2009, 6, 33–42. [Google Scholar] [CrossRef] [Green Version]
- Olsen, E.; Andersen, P.H.; Pfau, T. Accuracy and precision of equine gait event detection during walking with limb and trunk mounted inertial sensors. Sensors 2012, 12, 8145–8156. [Google Scholar] [CrossRef] [PubMed]
- Park, J.K.; Park, E.Y. Animal Monitoring Scheme in Smart Farm using Cloud-Based System. ECTI Trans. Comput. Inf. Technol. (ECTI-CIT) 2021, 15, 24–33. [Google Scholar] [CrossRef]
- Billah, M.M.; Yusof, Z.M.; Kadir, K.; Ali, A.M.M.; Ahmad, I. Real-time monitoring of water quality in animal farm: An IoT application. In Proceedings of the 2019 IEEE International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Kuala Lumpur, Malaysia, 27–29 August 2019; pp. 1–6. [Google Scholar]
- Michie, C.; Andonovic, I.; Davison, C.; Hamilton, A.; Tachtatzis, C.; Jonsson, N.; Duthie, C.A.; Bowen, J.; Gilroy, M. The Internet of Things enhancing animal welfare and farm operational efficiency. J. Dairy Res. 2020, 87, 20–27. [Google Scholar] [CrossRef]
- Liu, Y.; Li, D.; Du, B.; Shu, L.; Han, G. Rethinking Sustainable Sensing in Agricultural Internet of Things: From Power Supply Perspective. IEEE Wirel. Commun. 2022, 29, 102–109. [Google Scholar] [CrossRef]
- Lin, C.; Han, G.; Qi, X.; Du, J.; Xu, T.; Martinez-Garcia, M. Energy-optimal data collection for unmanned aerial vehicle-aided industrial wireless sensor network-based agricultural monitoring system: A clustering compressed sampling approach. IEEE Trans. Ind. Inform. 2020, 17, 4411–4420. [Google Scholar] [CrossRef]
- Germani, L.; Mecarelli, V.; Baruffa, G.; Rugini, L.; Frescura, F. An IoT architecture for continuous livestock monitoring using LoRa LPWAN. Electronics 2019, 8, 1435. [Google Scholar] [CrossRef] [Green Version]
- Essa, S.; Petra, R.; Uddin, M.R.; Suhaili, W.S.H.; Ilmi, N.I. IoT-based environmental monitoring system for Brunei peat swamp forest. In Proceedings of the 2020 International Conference on Computer Science and Its Application in Agriculture (ICOSICA), Bogor, Indonesia, 16–17 September 2020; pp. 1–5. [Google Scholar]
- Balaceanu, C.; Suciu, G.; Marcu, I. Libelium-based IoT Monitoring Solution for Precision Agriculture. J. E-Technol. Vol. 2019, 10, 1. [Google Scholar] [CrossRef]
- Marx, A.; Tetteh, G.O. A forest vitality and change monitoring tool based on RapidEye imagery. IEEE Geosci. Remote Sens. Lett. 2017, 14, 801–805. [Google Scholar] [CrossRef]
- Chaudhry, A.A.; Mumtaz, R.; Zaidi, S.M.H.; Tahir, M.A.; School, S.H.M. Internet of Things (IoT) and machine learning (ML) enabled livestock monitoring. In Proceedings of the 2020 IEEE 17th International Conference on Smart Communities: Improving Quality of Life Using ICT, IoT and AI (HONET), Charlotte, NC, USA, 14–16 December 2020; pp. 151–155. [Google Scholar]
- Yang, Y.; Ren, R.; Johnson, P.M. VetLink: A Livestock Disease-Management System. IEEE Potentials 2020, 39, 28–34. [Google Scholar] [CrossRef]
- Ma, S.; Yao, Q.; Masuda, T.; Higaki, S.; Yoshioka, K.; Arai, S.; Takamatsu, S.; Itoh, T. Development of noncontact body temperature monitoring and prediction system for livestock cattle. IEEE Sens. J. 2021, 21, 9367–9376. [Google Scholar] [CrossRef]
- Cardell-Oliver, R.; Smettem, K.; Kranz, M.; Mayer, K. Field testing a wireless sensor network for reactive environmental monitoring [soil moisture measurement]. In Proceedings of the 2004 Intelligent Sensors, Sensor Networks and Information Processing Conference, Melbourne, Australia, 14–17 December 2004; pp. 7–12. [Google Scholar]
- Daadoo, M.; Tarapiah, S.; Atalla, S. Dimensioning Mobile Wimax Network: A Case Study. ARPN J. Eng. Appl. Sci. 2017, 12, 462–470. [Google Scholar]
- Daadoo, M. Mobile Network Planning Process Case Study-3G Network. Comput. Inf. Sci. 2016, 9, 115–133. [Google Scholar]
- Tarapiah, S.; Aziz, K.; Atalla, S. Radio resource management in heterogeneous networks, functional models and implementation requirements. Int. J. Comput. Appl. 2015, 127, 1–4. [Google Scholar] [CrossRef]
- Brewster, C.; Roussaki, I.; Kalatzis, N.; Doolin, K.; Ellis, K. IoT in agriculture: Designing a Europe-wide large-scale pilot. IEEE Commun. Mag. 2017, 55, 26–33. [Google Scholar] [CrossRef]
- Cavaliere, D.; Loia, V.; Senatore, S. Towards a layered agent-modeling of IoT devices to precision agriculture. In Proceedings of the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Gaikwad, S.V.; Vibhute, A.D.; Kale, K.V.; Mehrotra, S.C. An innovative IoT based system for precision farming. Comput. Electron. Agric. 2021, 187, 106291. [Google Scholar] [CrossRef]
- Dunkels, A.; Gronvall, B.; Voigt, T. Contiki-a lightweight and flexible operating system for tiny networked sensors. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004; pp. 455–462. [Google Scholar]
- Keswani, B.; Mohapatra, A.G.; Keswani, P.; Khanna, A.; Gupta, D.; Rodrigues, J. Improving weather dependent zone specific irrigation control scheme in IoT and big data enabled self driven precision agriculture mechanism. Enterp. Inf. Syst. 2020, 14, 1494–1515. [Google Scholar] [CrossRef]
- Radočaj, D.; Jurišić, M.; Gašparović, M. The role of remote sensing data and methods in a modern approach to fertilization in precision agriculture. Remote Sens. 2022, 14, 778. [Google Scholar] [CrossRef]
- Bagha, H.; Yavari, A.; Georgakopoulos, D. Hybrid Sensing Platform for IoT-Based Precision Agriculture. Future Internet 2022, 14, 233. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Issad, H.A.; Aoudjit, R.; Belkadi, M.; Rodrigues, J.J. Many-objective optimisation-based optimal drone deployment for agricultural zone. Int. J. Commun. Netw. Distrib. Syst. 2021, 26, 76–98. [Google Scholar] [CrossRef]
- Batista, J.O.R.; Mostaço, G.M.; Silva, R.F.; Bressan, G.; Cugnasca, C.E.; Martucci, M. Evaluating the Performance of a Simulated Softwarized Agricultural Wireless Sensor Network. In Information and Communication Technologies for Agriculture—Theme I: Sensors; Springer: Berlin/Heidelberg, Germany, 2022; pp. 121–137. [Google Scholar]
- Casella, E.; Khamesi, A.R.; Silvestri, S. A framework for the recognition of horse gaits through wearable devices. Pervasive Mob. Comput. 2020, 67, 101213. [Google Scholar] [CrossRef]
- Nardelli, M.; Lanata, A.; Valenza, G.; Felici, M.; Baragli, P.; Scilingo, E.P. A tool for the real-time evaluation of ECG signal quality and activity: Application to submaximal treadmill test in horses. Biomed. Signal Process. Control 2020, 56, 101666. [Google Scholar] [CrossRef]
- Nadimi, E.S.; Søgaard, H.; Bak, T.; Oudshoorn, F.W. ZigBee-based wireless sensor networks for monitoring animal presence and pasture time in a strip of new grass. Comput. Electron. Agric. 2008, 61, 79–87. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Hancke, G.P. A zigbee-based animal health monitoring system. IEEE Sens. J. 2014, 15, 610–617. [Google Scholar] [CrossRef]
- Bhavsar, A.; Arolkar, H.A. ZigBee Frame Structure for WSN Based Animal Health Monitoring in Rural Area of Gujarat. In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Amity University Rajasthan, Jaipur, India, 26–28 February 2019. [Google Scholar]
- Sahana, K. Farm Vigilance: Smart IoT System for Farmland Monitoring and Animal Intrusion Detection using Neural Network. In Proceedings of the 2021 Asian Conference on Innovation in Technology (ASIANCON), Pune, India, 27–29 August 2021; pp. 1–6. [Google Scholar]
- Carels, D.; De Poorter, E.; Moerman, I.; Demeester, P. RPL mobility support for point-to-point traffic flows towards mobile nodes. Int. J. Distrib. Sens. Netw. 2015, 11, 470349. [Google Scholar] [CrossRef] [Green Version]
- Verdouw, C.; Wolfert, S.; Tekinerdogan, B. Internet of Things in agriculture. CAB Rev. Perspect. Agric. Vet. Sci. Nutr. Nat. Resour. 2016, 11, 1–12. [Google Scholar] [CrossRef]
- Baccelli, E.; Hahm, O.; Günes, M.; Wählisch, M.; Schmidt, T.C. RIOT OS: Towards an OS for the Internet of Things. In Proceedings of the 2013 IEEE conference on computer communications workshops (INFOCOM WKSHPS), Turin, Italy, 14–19 April 2013; pp. 79–80. [Google Scholar]
- Eriksson, J.; Österlind, F.; Finne, N.; Tsiftes, N.; Dunkels, A.; Voigt, T.; Sauter, R.; Marrón, P.J. COOJA/MSPSim: Interoperability testing for wireless sensor networks. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques, Rome, Italy, 2–6 March 2009; pp. 1–7. [Google Scholar]
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. In Mobile Computing; Springer: Berlin/Heidelberg, Germany, 1996; pp. 153–181. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | Description | Range [Unit] |
|---|---|---|
| Noncontact temperature | The temperature of the surface of soil, fruits, vegetables | −45–80 [C] |
| Leaf and Fruit bud temperature | Leaf and fruit bud temperature | −50–100 [C] |
| Oxygen levels | Indoor and outdoor oxygen levels | 0–100 [% O] |
| Ultraviolet radiation | UV measurement level in outdoor | 250–400 [nm] |
| Photosynthetically active radiation (PAR) | Photosynthetic photon flux density | 410–655 [nm] |
| Shortwave radiation | Shortwave radiation in agriculture | 0–2000 [m W] |
| Electrical conductivity, volumetric water content, and soil | Greenhouse substrate temperature measurements | 1–80, 0–25, −40–60 [-, dS/m, C] |
| Temperature and volumetric water content of the soil | Balance of soil in water | Apparent dielectric Permittivity (a): 1 (air) to 80 (water) [Unit] |
| Vapor pressure, humidity, temperature, and atmospheric pressure in the soil and air | Vapor measurements in soil and water | data range [Unit] |
| Leaf wetness | level of wetness of the plant leaf | 0–1400 [Counts] |
| Trunk diameter | Plants’ trunk growth | 2-100 [cm] |
| Stem diameter | Plants’ Stem growth | 0–20 [cm] |
| Fruit diameter | Plants’ Fruit growth | 0–11 [cm] |
| Temperature, air humidity, and pressure | Environmental Parameters | 0–65, 0–100, 30–110 [C, kPa] |
| O.S Platform | Description | H.W Platform | Kernel Structure | Programming Model |
|---|---|---|---|---|
| Contiki | Event-driven O.S suitable for constrained WSN | Tmote, Sky, TelosB, MicaZ, ESB | Modular | Event driven |
| TinyOS | Event-driven O.S suitable for constrained WSN | Tmote, Sky, TelosB, MicaZ, ESB | Monolithic | Event driven |
| Linux | Event-driven O.S suitable for constrained WSN | Tmote, Sky, TelosB, MicaZ, ESB | Hybrid | Threading |
| Parameter | Value |
|---|---|
| Number of nodes used | 31 |
| Type of Routing | IPv6 |
| Standard used | 6lowPan IEEE 802.15.4 |
| Scenario area | (25 × 25), ( 50 × 50), (75 × 75), and (100 × 100) |
| Type of transport protocol | UDP |
| Transmission range and interface range | 20, 40 |
| Transmission ratio and receiver ratio | 80,100 |
| Mobility model | Random waypoint |
| Data | Data Type | Size of Data in Bits |
|---|---|---|
| Speed rate | Float | 32 |
| Air flow sensor | Float | 32 |
| Body temperature sensor | Double | 64 |
| Heart rate sensor | Float | 32 |
| Indicate colic | Boolean | 1 |
| Scenario | Trees | Trees | Animals | Animals |
|---|---|---|---|---|
| Avg Hops | Connectivity | Avg Hops | Connectivity | |
| 25 × 25 | 1.2 | 100% | 1.25 | 97% |
| 50 × 50 | 1.72 | 100% | 1.5 | 91.9% |
| 75 × 75 | 3 | 100% | 1.7 | 55% |
| 100 × 100 | 4 | 11% | 1.6 | 38% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atalla, S.; Tarapiah, S.; Gawanmeh, A.; Daradkeh, M.; Mukhtar, H.; Himeur, Y.; Mansoor, W.; Hashim, K.F.B.; Daadoo, M. IoT-Enabled Precision Agriculture: Developing an Ecosystem for Optimized Crop Management. Information 2023, 14, 205. https://doi.org/10.3390/info14040205
Atalla S, Tarapiah S, Gawanmeh A, Daradkeh M, Mukhtar H, Himeur Y, Mansoor W, Hashim KFB, Daadoo M. IoT-Enabled Precision Agriculture: Developing an Ecosystem for Optimized Crop Management. Information. 2023; 14(4):205. https://doi.org/10.3390/info14040205
Chicago/Turabian StyleAtalla, Shadi, Saed Tarapiah, Amjad Gawanmeh, Mohammad Daradkeh, Husameldin Mukhtar, Yassine Himeur, Wathiq Mansoor, Kamarul Faizal Bin Hashim, and Motaz Daadoo. 2023. "IoT-Enabled Precision Agriculture: Developing an Ecosystem for Optimized Crop Management" Information 14, no. 4: 205. https://doi.org/10.3390/info14040205