
A Universal Simulation Framework of Shipborne Inertial Sensors Based on the Ship Motion Model and Robot Operating System

Abstract
:1. Introduction
2. Physical-Based Ship Motion Modeling and Simulation
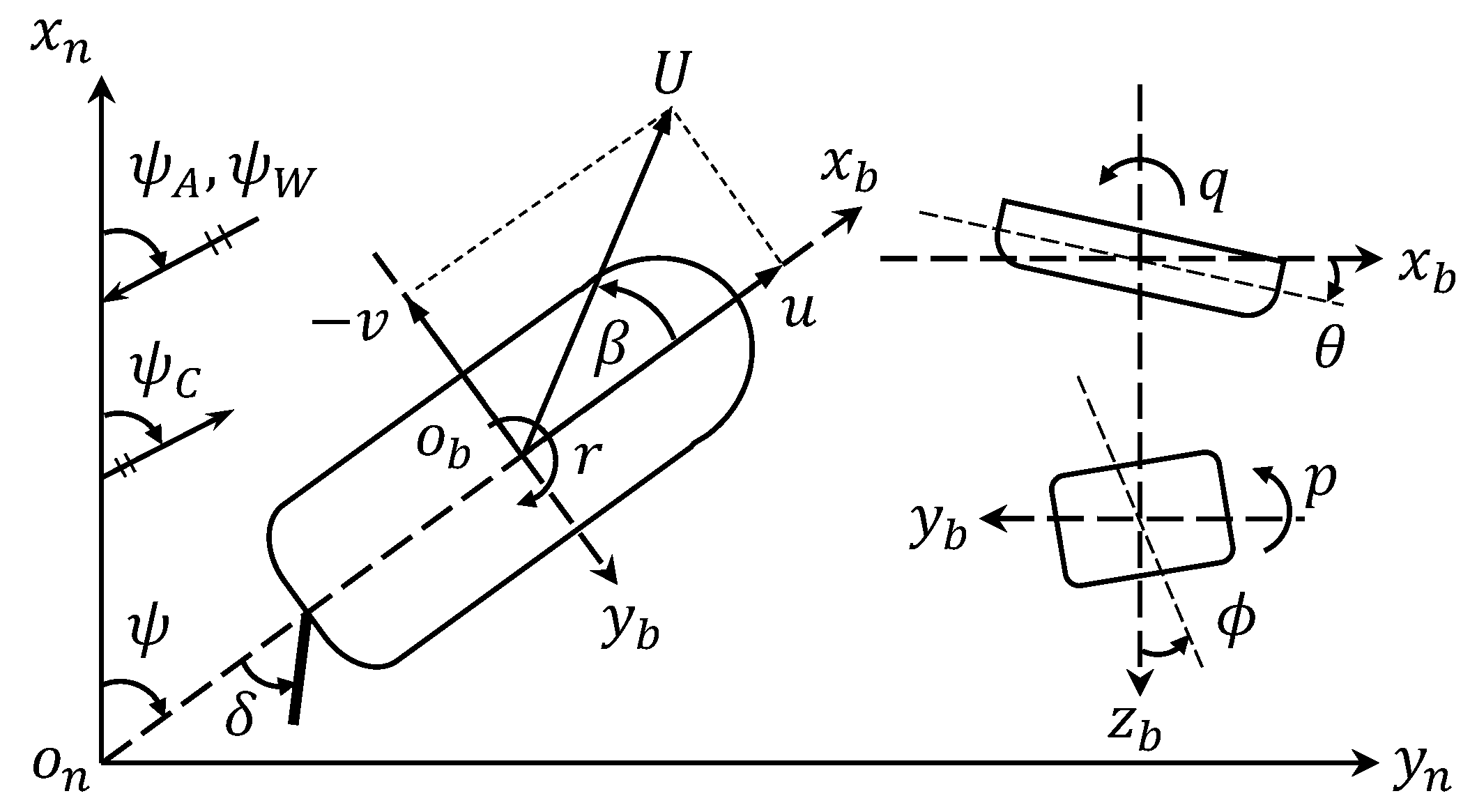
2.1. Physical-Based Ship Motion Model
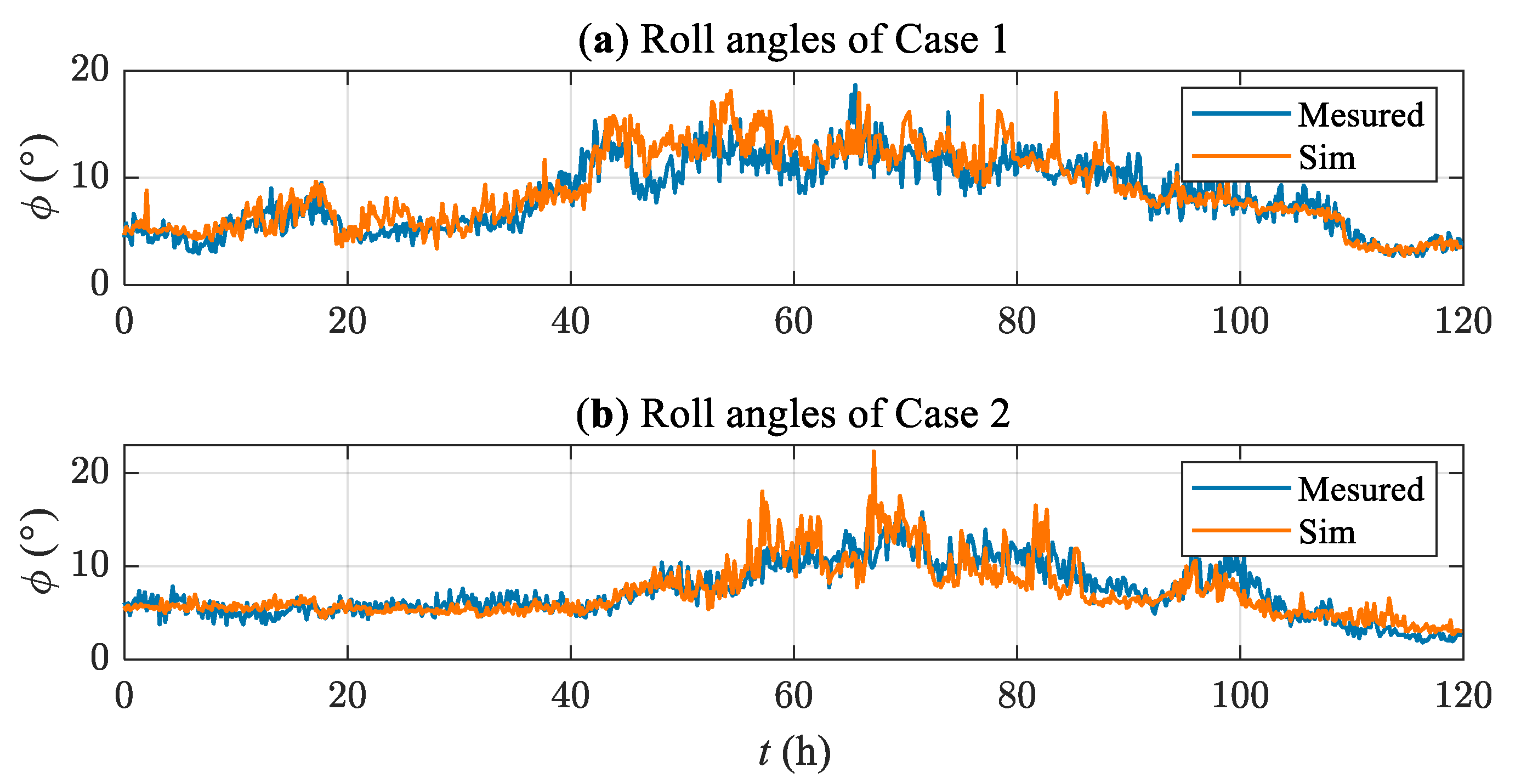
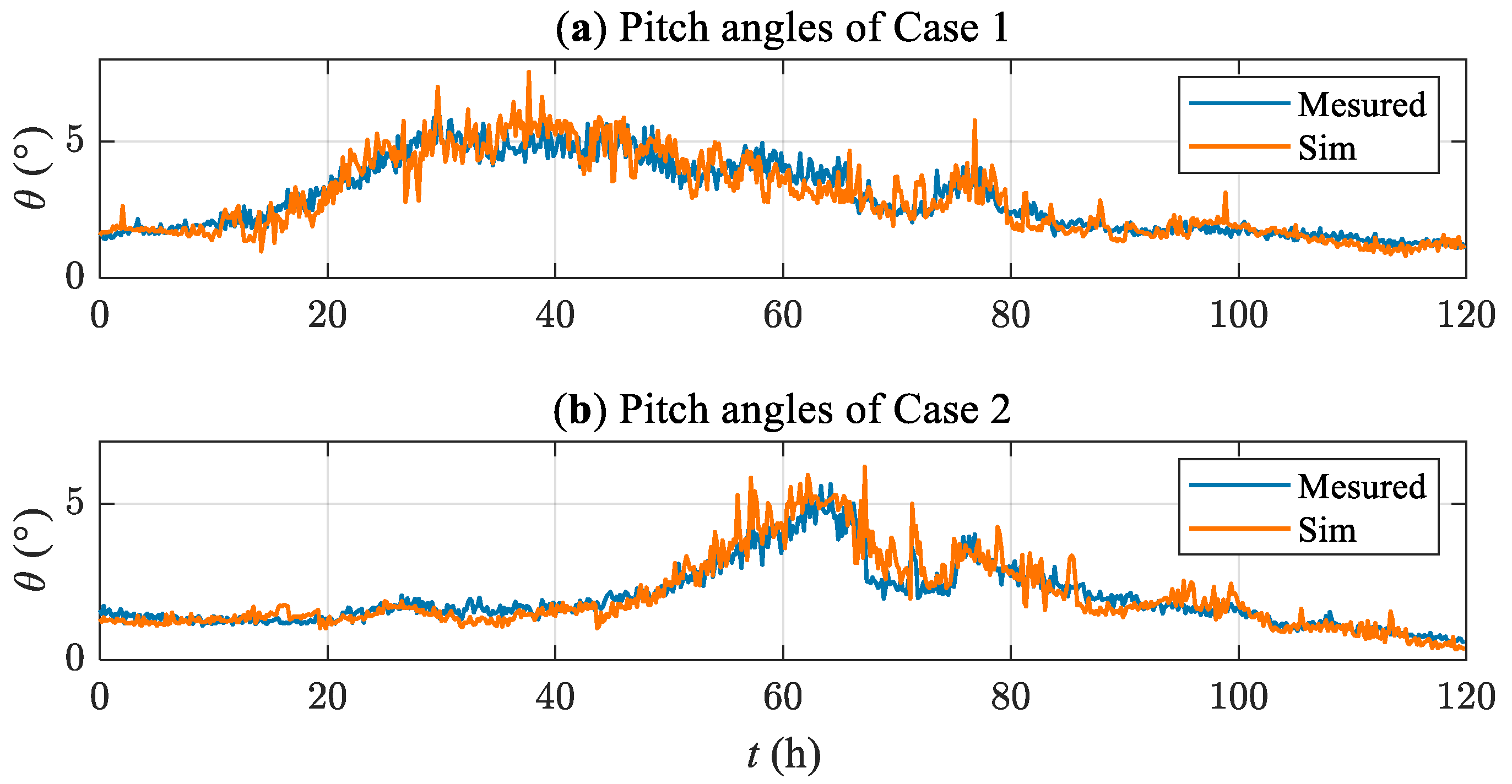
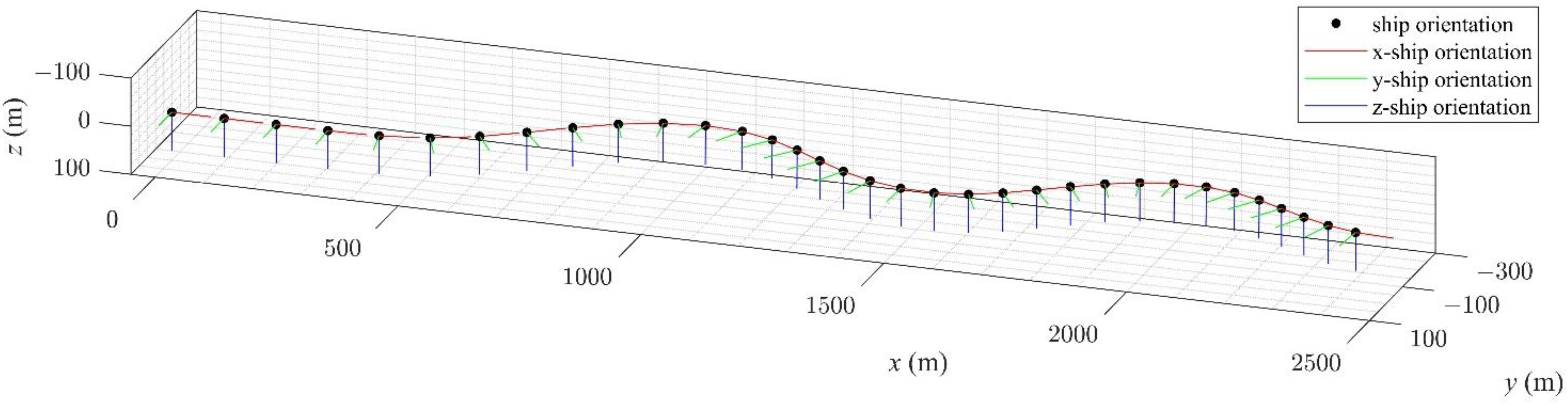
2.2. Ship Motion Simulation and Validation
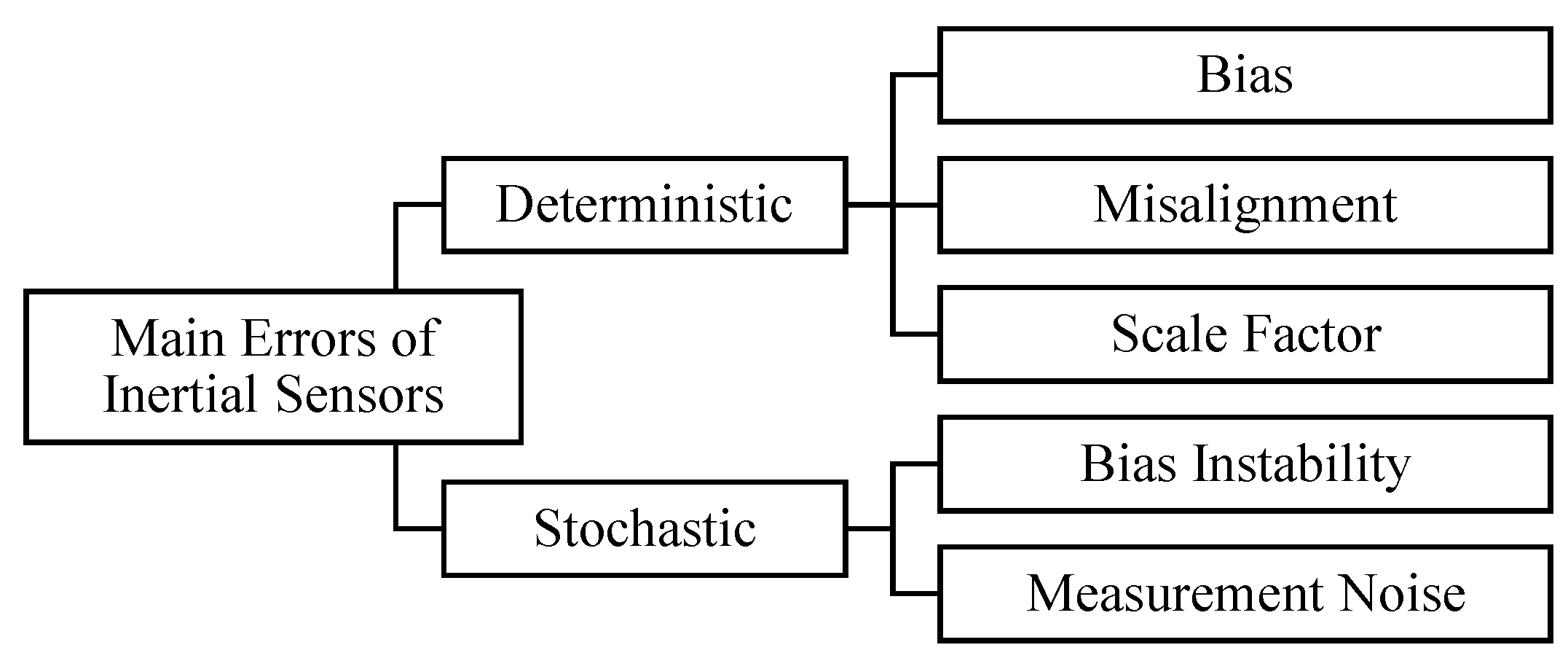
3. Modeling of Inertial Sensors
3.1. Measurement Model for Inertial Sensors
3.2. Stochastic Error Model for Inertial Sensors
4. Simulation Framework of Shipborne Inertial Sensors
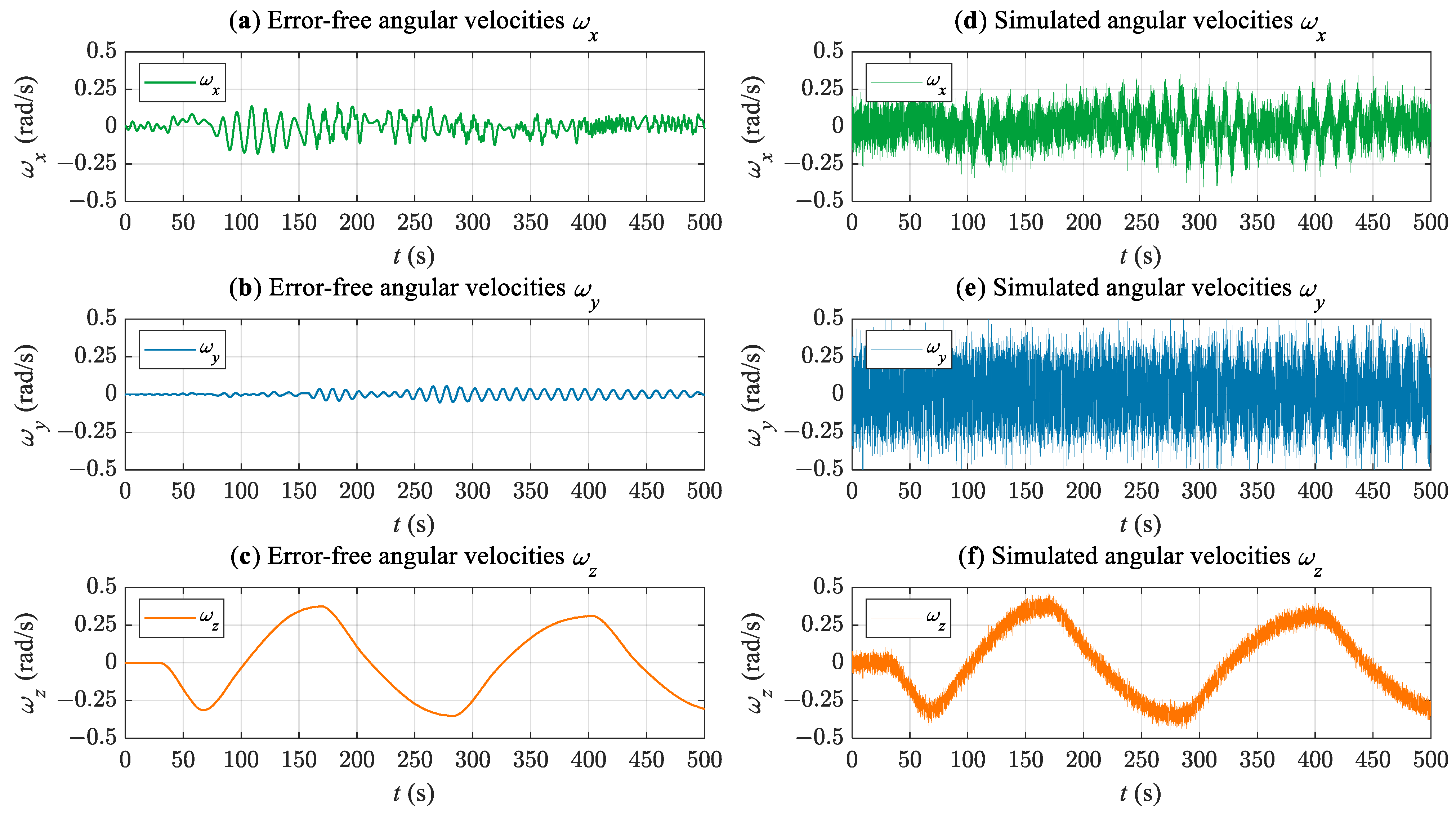
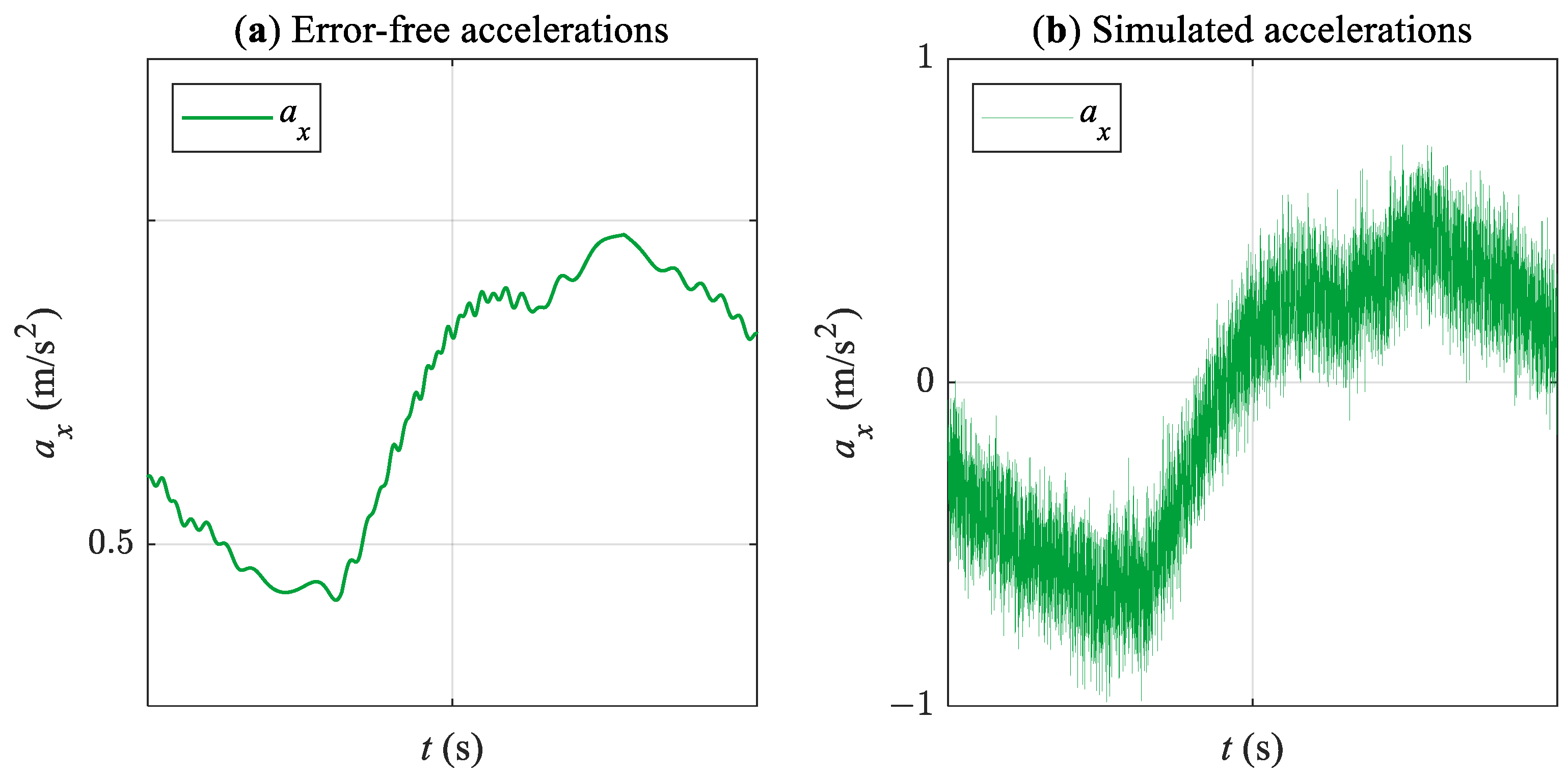
4.1. Shipborne Inertial Sensors Simulation
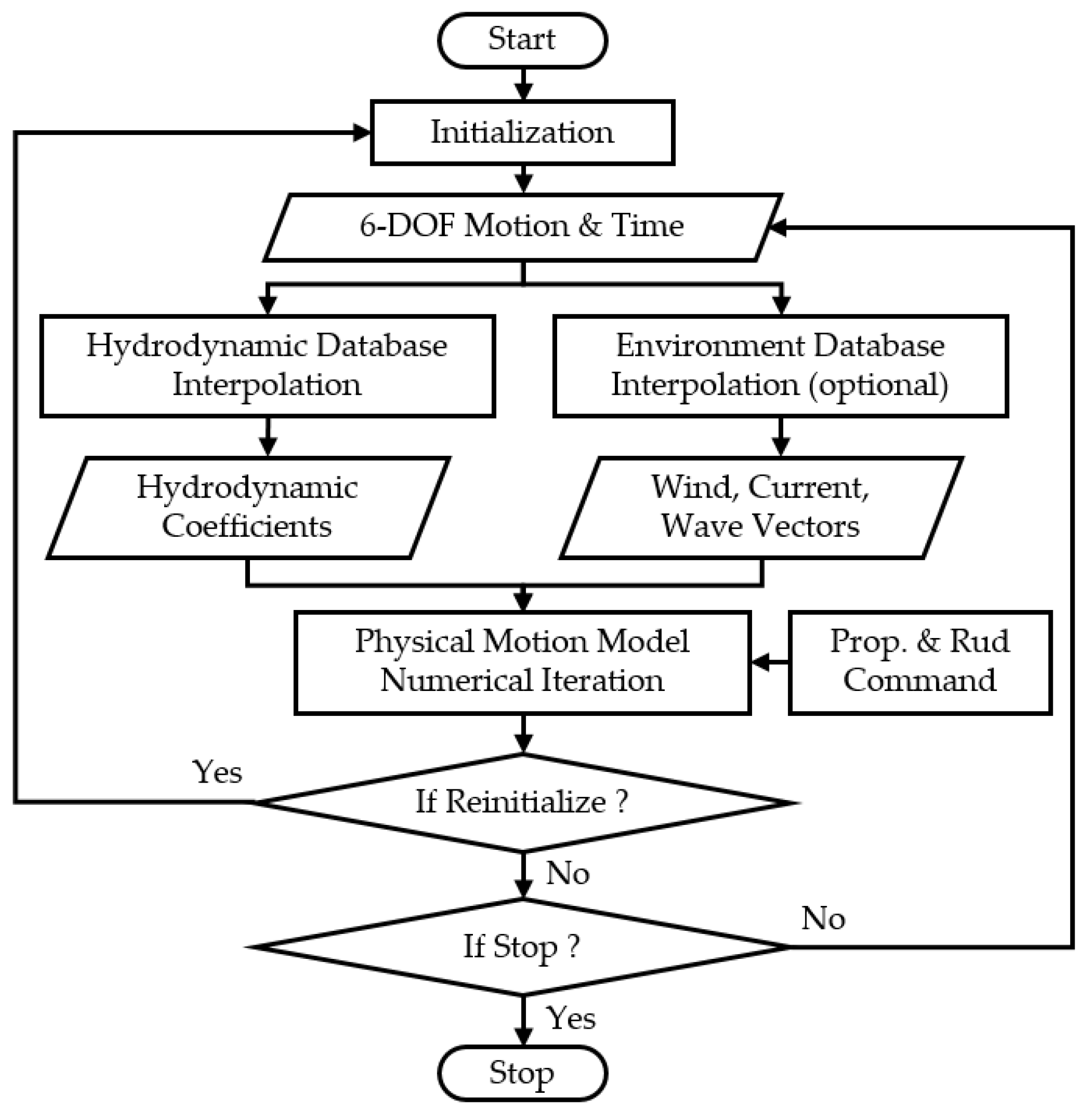
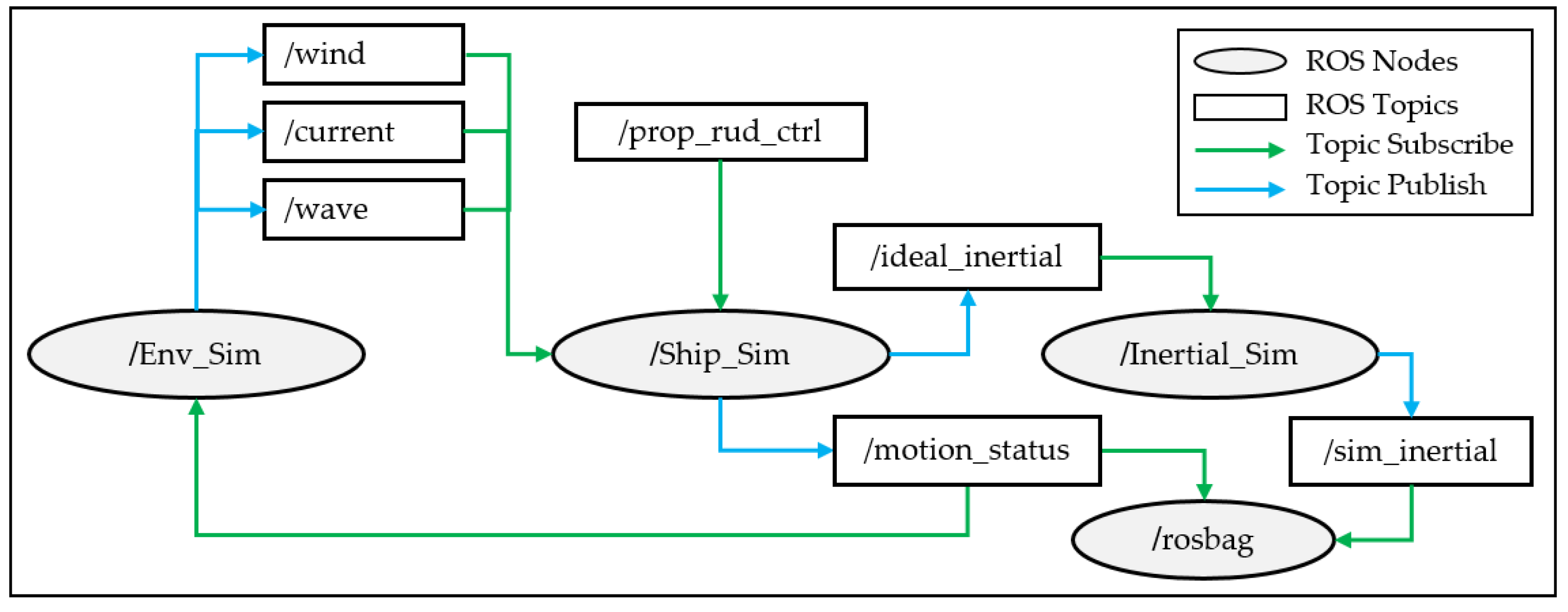
4.2. Universal Simulation Framework Based on the ROS
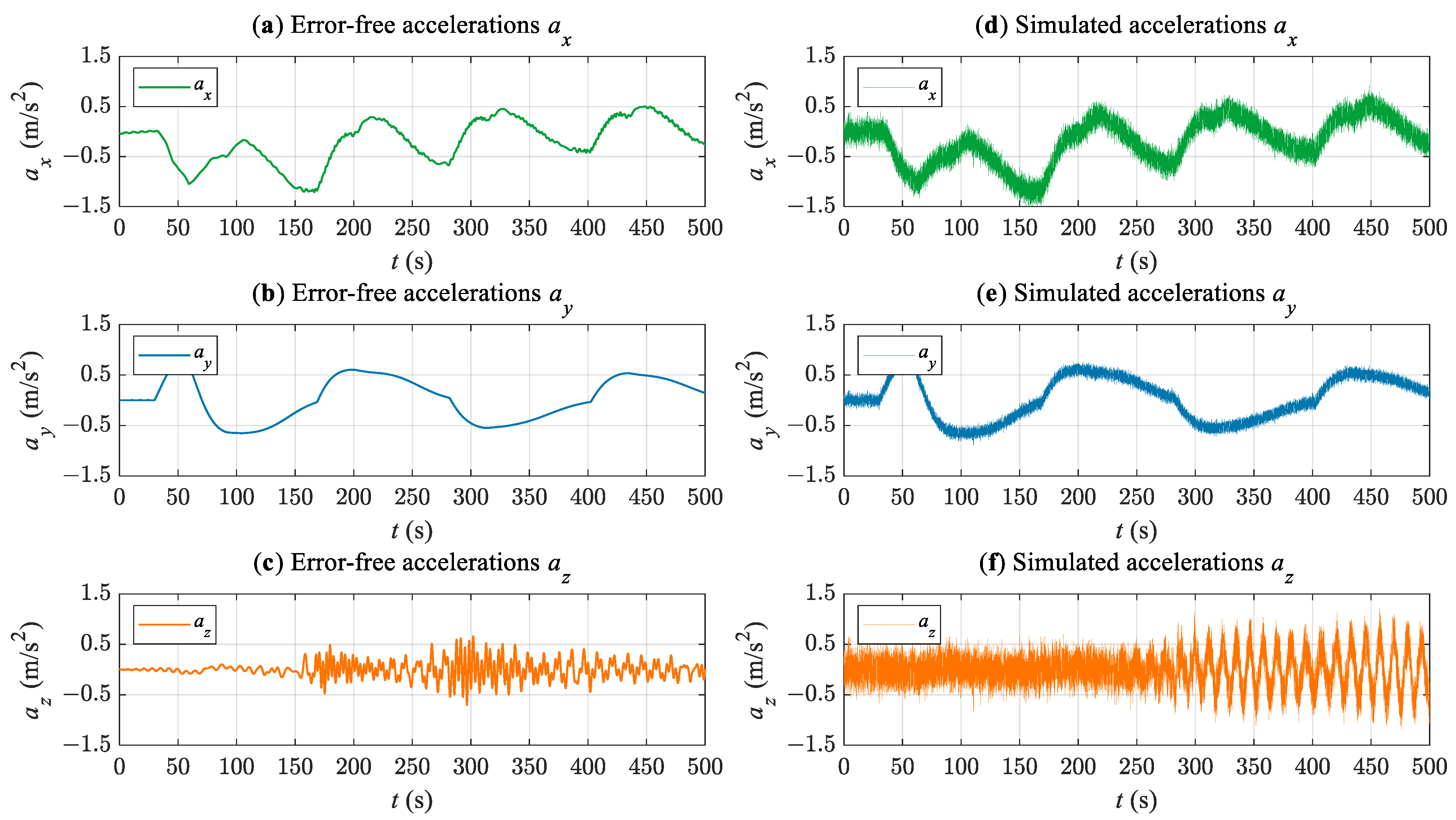
4.3. Simulation Results
5. Discussion
6. Conclusions
- The physical-based ship motion model was established which could provide a realistic simulation of the ship motion status under environmental disturbances;
- The framework was designed by a module decoupling idea. The interaction between modules only relied on unified data interfaces and the modules were replaceable;
- The native ROS message types were employed in the framework which could directly interact with algorithms designed for real sensors;
- The error terms, error strength, sampling frequency, environmental information input, and rudder and propeller control input were all customizable which made the framework more flexible to handle different environmental conditions and sensor settings.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Karetnikov, V.; Ol’khovik, E.; Butsanets, A.; Ivanova, A. Development of Methods for Maneuvering Trials of Autonomous Ships in Test Water Area. In Proceedings of the XIII International Scientific Conference on Architecture and Construction 2020, Singapore, 22–24 September 2020; pp. 40–46. [Google Scholar] [CrossRef]
- Huang, W.; Wang, K.; Lv, Y.; Zhu, F. Autonomous Vehicles Testing Methods Review. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 163–168. [Google Scholar] [CrossRef]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. In Field and Service Robotics; Springer Proceedings in Advanced Robotics; Hutter, M., Siegwart, R., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 621–635. [Google Scholar] [CrossRef] [Green Version]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; García, J.M.V.; Malkamäki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S.; et al. Sensors and AI Techniques for Situational Awareness in Autonomous Ships: A Review. IEEE Trans. Intell. Transp. Syst. 2020, 1–20. [Google Scholar] [CrossRef]
- Wright, R.G. Intelligent Autonomous Ship Navigation Using Multi-Sensor Modalities. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 503–510. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.; Kim, S.Y. Autonomous Collision Detection and Avoidance for ARAGON USV: Development and Field Tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Bucknall, R. A Robust Localization Method for Unmanned Surface Vehicle (USV) Navigation Using Fuzzy Adaptive Kalman Filtering. IEEE Access 2019, 7, 46071–46083. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estim ator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Virtual Conference, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-Time. In Proceedings of the Robotics: Science and Systems Conference (RSS), Berkeley, CA, USA, 14–16 July 2014; pp. 109–111. [Google Scholar] [CrossRef]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koenig, N.; Howard, A. Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef] [Green Version]
- Rivera, Z.B.; De Simone, M.C.; Guida, D. Unmanned Ground Vehicle Modelling in Gazebo/ROS-Based Environments. Machines 2019, 7, 42. [Google Scholar] [CrossRef] [Green Version]
- Bernardeschi, C.; Fagiolini, A.; Palmieri, M.; Scrima, G.; Sofia, F. ROS/Gazebo Based Simulation of Co-Operative UAVs. In Modelling and Simulation for Autonomous Systems; Mazal, J., Ed.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; pp. 321–334. [Google Scholar] [CrossRef]
- Garzón, M.; Spalanzani, A. A Hybrid Simulation Tool for Autonomous Cars in Very High Traffic Scenarios. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 803–808. [Google Scholar] [CrossRef] [Green Version]
- Bingham, B.; Aguero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward Maritime Robotic Simulation in Gazebo. In Oceans 2019 MTS/IEEE Seattle; IEEE: Seattle, WA, USA, 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Paravisi, M.; Santos, D.H.; Jorge, V.; Heck, G.; Gonçalves, L.M.; Amory, A. Unmanned Surface Vehicle Simulator with Realistic Environmental Disturbances. Sensors 2019, 19, 1068. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rong, G.; Shin, B.H.; Tabatabaee, H.; Lu, Q.; Lemke, S.; Možeiko, M.; Boise, E.; Uhm, G.; Gerow, M.; Mehta, S.; et al. LGSVL Simulator: A High Fidelity Simulator for Autonomous Driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Virtual Conference, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Autoware, AI. Available online: https://github.com/Autoware-AI/autoware.ai (accessed on 1 August 2021).
- ApolloAuto. Available online: https://github.com/ApolloAuto/apollo (accessed on 1 August 2021).
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning (CoRL), Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- NVIDIA DRIVE Sim. Available online: https://developer.nvidia.com/drive/drive-sim (accessed on 1 August 2021).
- Wang, Y.; Bulger, C.; Thanyamanta, W.; Bose, N. A Backseat Control Architecture for a Slocum Glider. J. Mar. Sci. Eng. 2021, 9, 532. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar] [CrossRef]
- Jing, Q.; Shen, H.; Yin, Y. Motion Modeling and Simulation of Maritime Autonomous Surface Ships in Realistic Environmental Disturbances. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Virtual Conference, 20–23 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Jing, Q.; Shen, H.; Yin, Y. A Stereolithographic Model-Based Dense Body Plan Generation Method to Construct a Ship Hydrodynamic Coefficients Database. J. Mar. Sci. Eng. 2020, 8, 222. [Google Scholar] [CrossRef] [Green Version]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG Standard Method for Ship Maneuvering Predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Hekkenberg, R.; Quadvlieg, F.; Hopman, H.; Zhao, B. An Integrated Empirical Manoeuvring Model for Inland Vessels. Ocean Eng. 2017, 137, 287–308. [Google Scholar] [CrossRef]
- Jing, Q.; Sasa, K.; Chen, C.; Yin, Y.; Yasukawa, H.; Terada, D. Analysis of Ship Maneuvering Difficulties under Severe Weather Based on Onboard Measurements and Realistic Simulation of Ocean Environment. Ocean Eng. 2021, 221, 108524. [Google Scholar] [CrossRef]
- Chen, C.; Sasa, K.; Prpić-Oršić, J.; Mizojiri, T. Statistical Analysis of Waves’ Effects on Ship Navigation Using High-Resolution Numerical Wave Simulation and Shipboard Measurements. Ocean Eng. 2021, 229, 108757. [Google Scholar] [CrossRef]
- Unsal, D.; Demirbas, K. Estimation of Deterministic and Stochastic IMU Error Parameters. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 862–868. [Google Scholar]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and Modeling of Inertial Sensors Using Allan Variance. IEEE Trans. Instrum. Meas. 2007, 57, 140–149. [Google Scholar] [CrossRef]
- Caron, F.; Duflos, E.; Pomorski, D.; Vanheeghe, P. GPS/IMU Data Fusion Using Multisensor Kalman Filtering: Introduction of Contextual Aspects. Inf. Fusion 2006, 7, 221–230. [Google Scholar] [CrossRef]
- Foote, T. Tf: The Transform Library. In Proceedings of the 2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), Wpburm, MA, USA, 22–23 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- imu_utils: A ROS Package Tool to Analyze the IMU Performance. Available online: https://github.com/gaowenliang/imu_utils (accessed on 1 August 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Value |
|---|---|
| Length L | 160.4 m |
| Breadth B | 27.2 m |
| Draft d | 8.16 m |
| Propeller type | 4-bladed solid × 1 set (FPP) |
| Propeller diameter DP | 5.25 m |
| Rudder type | Balanced type × 1 set |
| Rudder area AR | 26.4 m2 |
| Sailing speed | 14 knots |
| Error Type | Accelerometer | Gyroscope |
|---|---|---|
| Measurement Noise | 0.013 m/s2 | 0.0084 rad/s |
| Bias Instability | 0.00063 m/s2 | 0.000087 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, Q.; Wang, H.; Hu, B.; Liu, X.; Yin, Y. A Universal Simulation Framework of Shipborne Inertial Sensors Based on the Ship Motion Model and Robot Operating System. J. Mar. Sci. Eng. 2021, 9, 900. https://doi.org/10.3390/jmse9080900
Jing Q, Wang H, Hu B, Liu X, Yin Y. A Universal Simulation Framework of Shipborne Inertial Sensors Based on the Ship Motion Model and Robot Operating System. Journal of Marine Science and Engineering. 2021; 9(8):900. https://doi.org/10.3390/jmse9080900
Chicago/Turabian StyleJing, Qianfeng, Haichao Wang, Bin Hu, Xiuwen Liu, and Yong Yin. 2021. "A Universal Simulation Framework of Shipborne Inertial Sensors Based on the Ship Motion Model and Robot Operating System" Journal of Marine Science and Engineering 9, no. 8: 900. https://doi.org/10.3390/jmse9080900