Electronic Constant Twist Angle Control System Suitable for Torsional Vibration Tuning of Propulsion Systems





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Pneumatic Flexible Shaft Couplings
- (1)
- Tuning, where the value of pressure is pre-set to a suitable value out of operation. In this case, the pneumatic flexible shaft coupling works as a classical shaft coupling with option to adapt its torsional stiffness out of operation. However, it still represents a passive vibroisolation system.
- (2)
- Continuous tuning, where the pressure is adjusted (via the control system) to current operating conditions directly during operation. Thus, the pneumatic flexible shaft coupling in this case acts not as a classical shaft coupling, but it can be considered as a pneumatic tuner of torsional oscillations (PTTO) used as an element for the realization of semi-active vibroisolation.
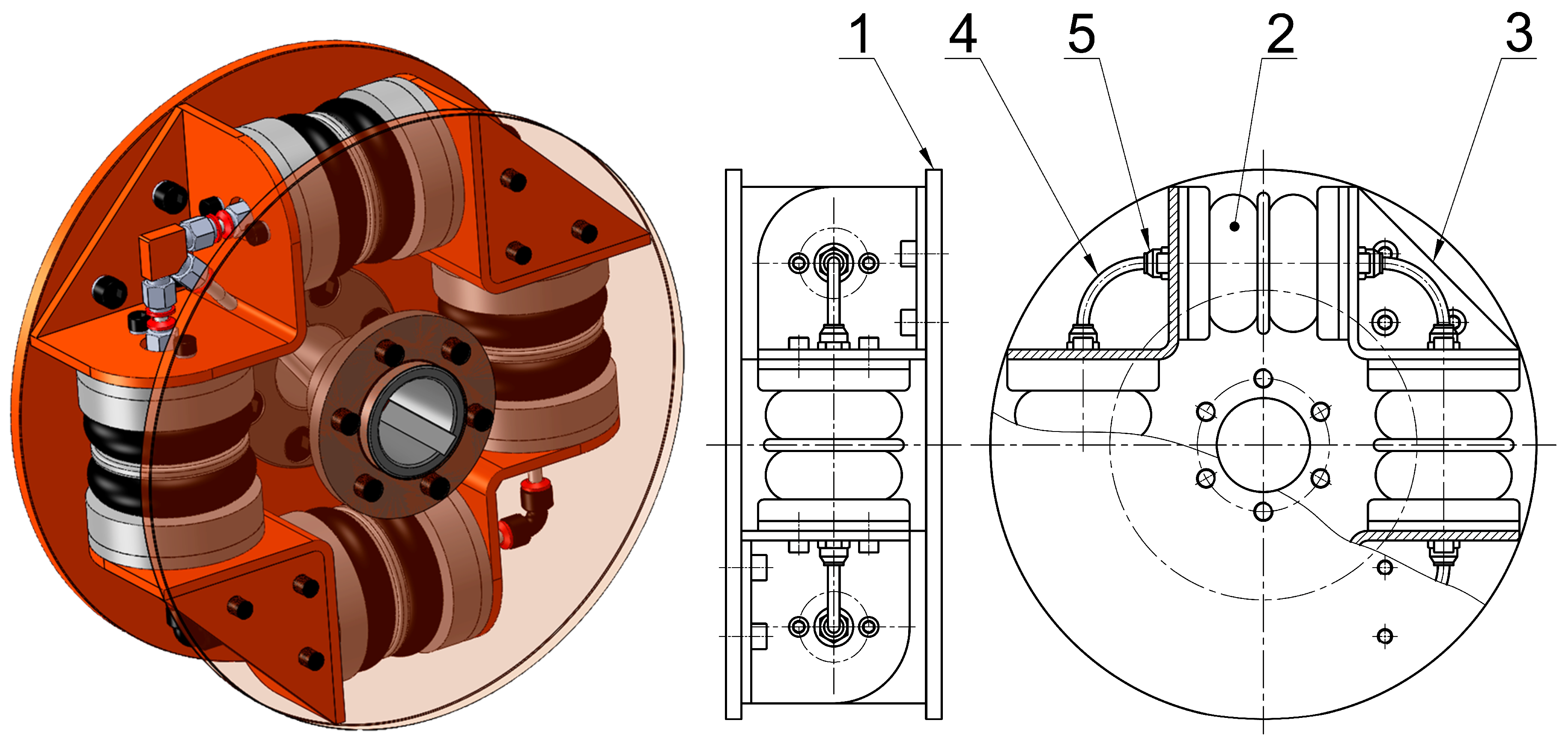
2.1.1. Used Pneumatic Tuner of Torsional Oscillations
2.2. Constant Twist Angle Control
2.3. Experimental Torsional Oscillating Mechanical System
- (1)
- Power supply for the optoelectronic sensors, pressure sensors and electromagnetic valves;
- (2)
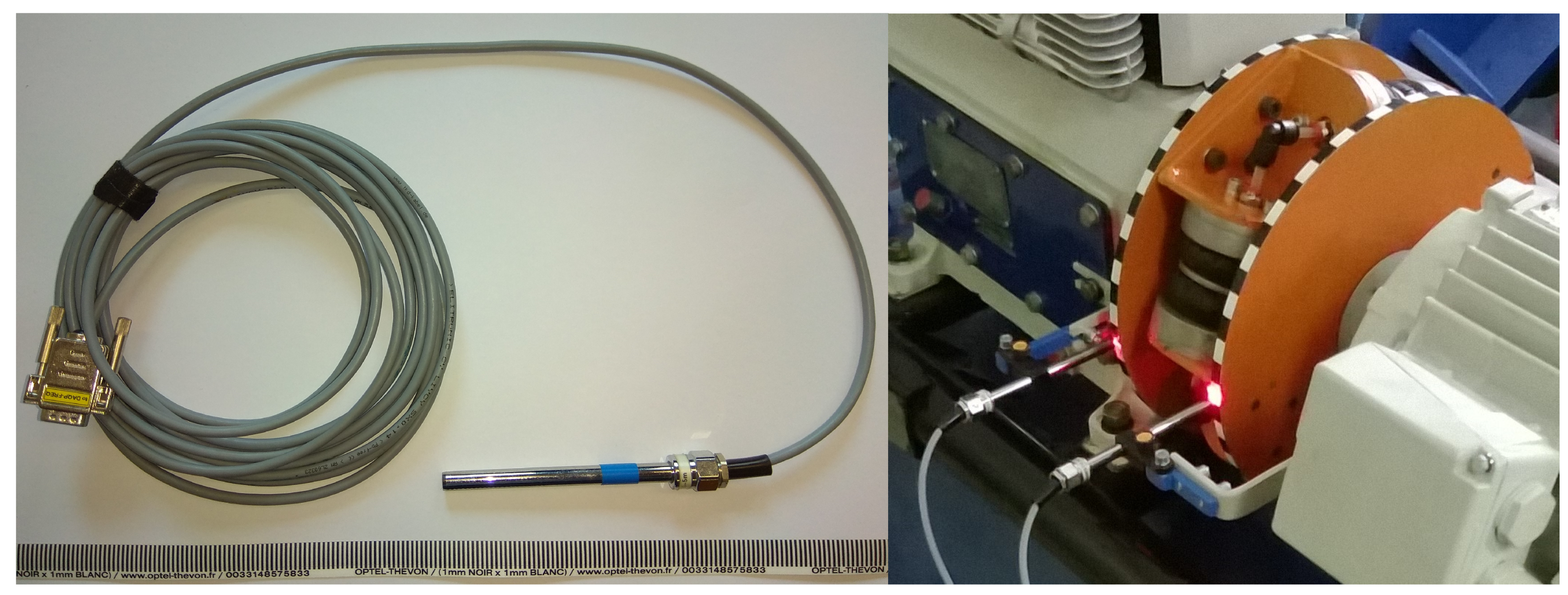
- Measurement of the black-to-white stripe edge-crossing times for both hubs of the PTTO;
- (3)
- Measurement of the air pressure value in the compression space of the PTTO and the compressor output air pressure value;
- (4)
- Communication with the software part (running in a PC) of our ECTACS. The measured data are sent to the PC in order to be further processed in real-time;
- (5)
- Setting of the needed value of the air pressure in the compression space of the PTTO, which is computed by the software part of our ECTACS. The quick and very accurate pressure setting is carried out by electromagnetic valves, one for the inflation and one for the deflation of the compression space of the PTTO.
2.4. Data Measuring and Processing
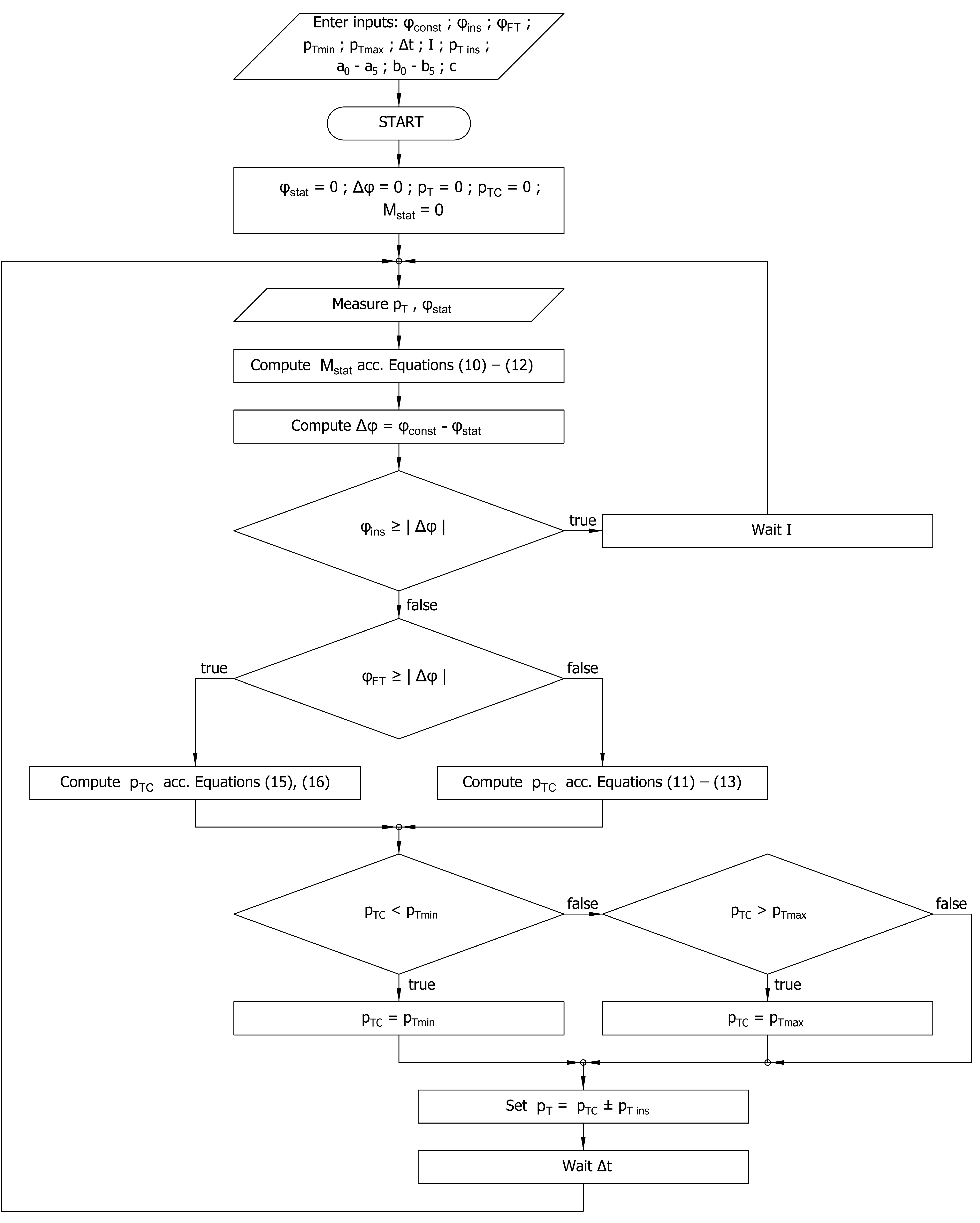
2.5. Description of the Constant Twist Angle Control System Function
3. Results and Discussion
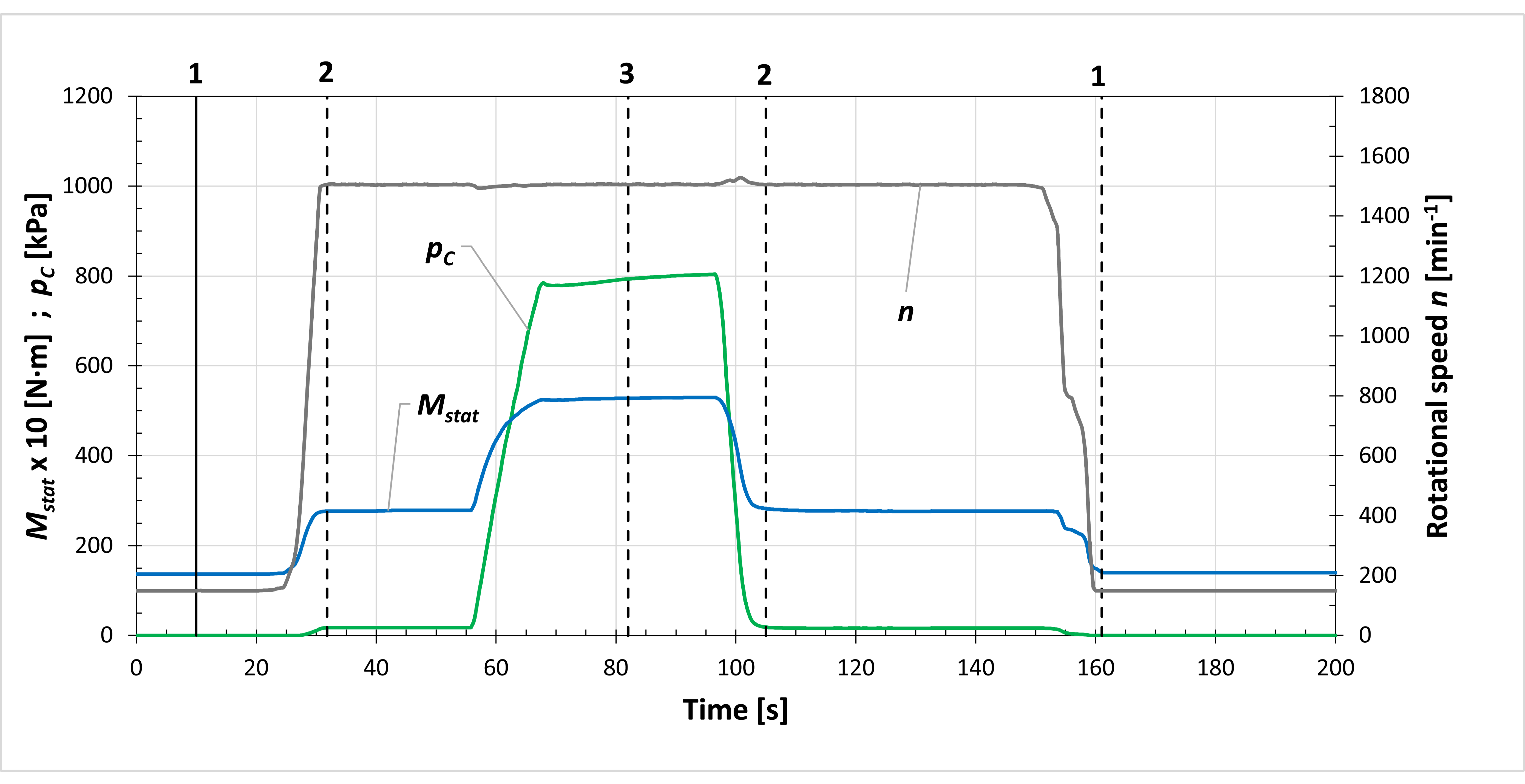
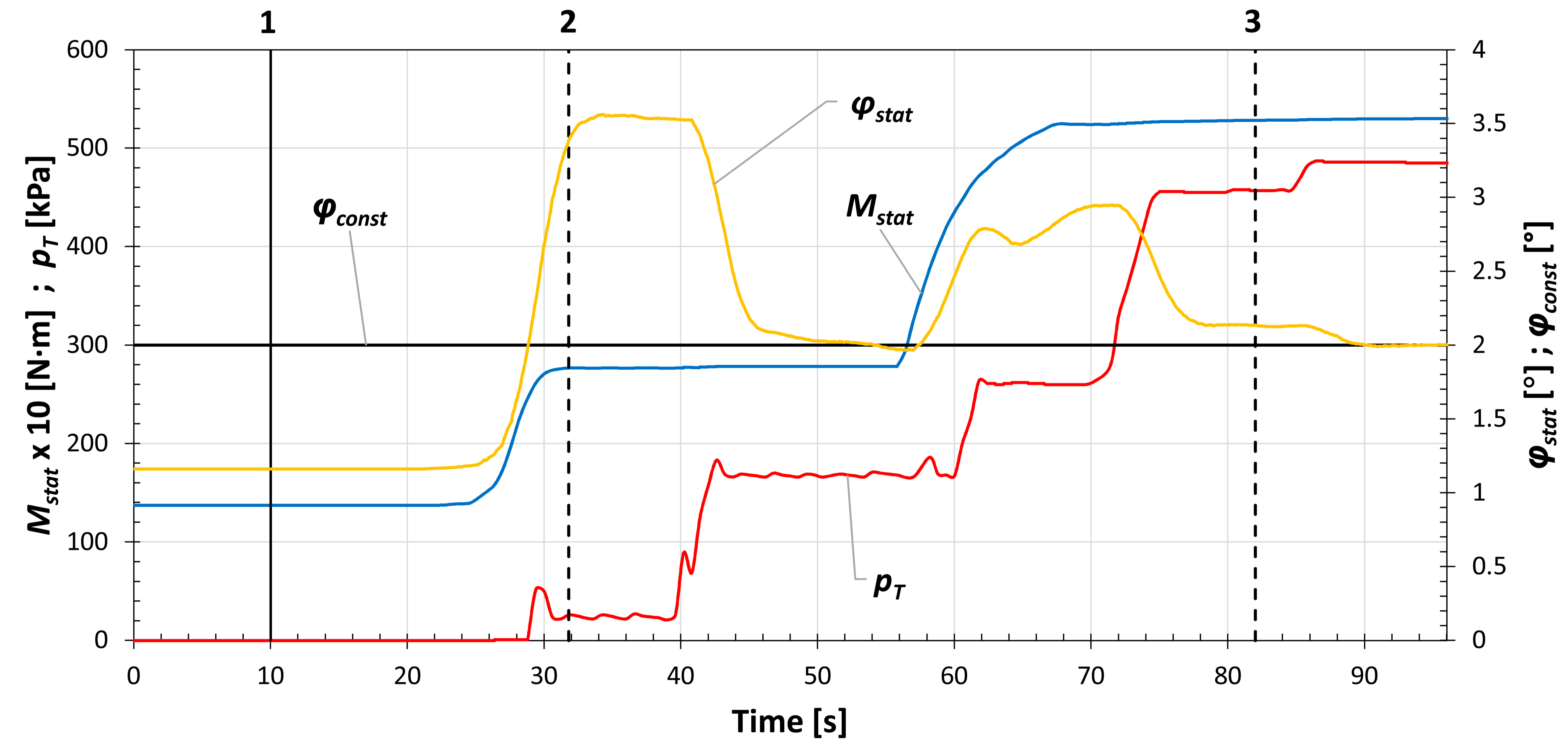
- (1)
- Minimum rotational speed, negligible compressor output air overpressure (caused only by flow resistance in the compressor output piping);
- (2)
- Maximum rotational speed, negligible compressor output air overpressure (caused by flow resistance in the compressor output piping);
- (3)
- Maximum rotational speed, maximum compressor output air overpressure set by the throttling valve.
4. Discussion
- The system provides a quick and very accurate setting of a constant twist angle of the pneumatic tuner, thanks to the mathematical and physical model of the pneumatic tuner used for the twist angle computations;
- Torsional vibration in the mechanical system does not directly affect the control device like in the case of regulators directly built into the pneumatic tuner;
- Dynamic mass properties of the mechanical system are not influenced by additional masses because there are no regulators built into the pneumatic tuner;
- It allows the use of any torsional oscillating mechanical system (regardless of size and transmitted load torque);
- There is no friction between the sensors and the hubs of the pneumatic tuner;
- It is possible to quickly replace the broken, damaged or malfunctioning sensor.
- It is also necessary to mention the general disadvantages of the presented electronic system:
- The function of the system is sensitive to dirt on the optical part of the optoelectronic sensors or the reflective black–white tape. This issue could be fixed using sensors with a similar working principle, for example, proximity probes and a toothed wheel instead of black and white stripes;
- The system needs a power supply and in its present state and also a PC for the software part of the system;
- The pneumatic tuner’s mathematical and physical model parameters, which need to be set in the software, have to be known.
5. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zoul, V. Dynamic of propulsion, present situation and trends. Trans. Univ. Košice 2014, 2, 101–106. [Google Scholar]
- Czech, P. Application of probabilistic neural network and vibration signals for gasket under diesel engine head damage. Sci. J. Sil. Univ. Technol. Ser. Transp. 2013, 78, 39–45. [Google Scholar]
- Czech, P. Determination of the course of pressure in an internal combustion engine cylinder with the use of vibration effects and radial basis function—Preliminary research. In Communications in Computer and Information Science; Mikulski, J., Ed.; Springer: Berlin, Germany, 2012; Volume 329, pp. 175–182. [Google Scholar] [CrossRef]
- Puškár, M.; Bigoš, P. Output performance increase of two-stroke combustion engine with detonation combustion optimization. Strojarstvo 2010, 52, 577–587. [Google Scholar]
- Sinay, J.; Puškár, M.; Kopas, M. Reduction of the NOx emissions in vehicle diesel engine in order to fulfill future rules concerning emissions released into air. Sci. Total Environ. 2018, 624, 1421–1428. [Google Scholar] [CrossRef] [PubMed]
- Czech, P.; Wojnar, G.; Burdzik, R.; Konieczny, L.; Warczek, J. Application of the discrete wavelet transform and probabilistic neural networks in IC engine fault diagnostics. J. Vibroeng. 2014, 16, 1619–1639. [Google Scholar]
- Liang, X.; Shu, G.; Dong, L.; Wang, B.; Yang, K. Progress and Recent Trends in Torsional Vibration of Internal Combustion Engines. In Advances in Vibration Analysis Research; Ebrahimi, F., Ed.; InTech: Rijeka, Croatia, 2011; pp. 245–272. [Google Scholar] [CrossRef]
- Bartel, T.; Herold, S.; Infante, F.; Käsgen, J.; Matthias, M.; Millitzer, J.; Perfetto, S. Active Vibration Reduction of Ship Propulsion Systems. In Proceedings of the 2018 Joint Conference—Acoustics, Ustka, Poland, 11–14 September 2018; Marszal, J., Kochańska, I., Eds.; Polish Acoustical Society: Gdańsk, Poland, 2018; pp. 15–20. [Google Scholar] [CrossRef]
- Feese, T.; Hill, C. Prevention of Torsional Vibration Problems in Reciprocating Machinery. In Proceedings of the 38th Turbomachinery Symposium, Houston, Texas, 14–17 September 2009; Turbomachinery Laboratories, Texas A&M University: College Station, TX, USA, 2018; pp. 213–238. [Google Scholar] [CrossRef]
- Gurský, P. Identification of the Influence of Work Cycles on the Basic Properties of Different Types of Flexible Couplings and Their Mutual Comparison. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 2011. (In Slovak). [Google Scholar]
- Han, H.S.; Lee, K.H.; Park, S.H. Parametric study to identify the cause of high torsional vibration of the propulsion shaft in the ship. Eng. Fail. Anal. 2016, 59, 334–346. [Google Scholar] [CrossRef]
- Han, H.; Lee, K.; Park, S. Evaluation of the increased stiffness for the elastic coupling under the dynamic loading conditions in a ship. Eng. Fail. Anal. 2016, 68, 254–262. [Google Scholar] [CrossRef]
- Homišin, J. New Types of Flexible Shaft Couplings: Development, Research, Application; Vienala: Košice, Slovakia, 2002. (In Slovak) [Google Scholar]
- Neupauerová, S. Investigation of stress allocation in the rubber-cord flexible element by FEF. Acta Mech. Slov. 2005, 9, 27–30. (In Slovak) [Google Scholar]
- Homišin, J. Contribution and perspectives of new flexible shaft coupling types—Pneumatic couplings. Sci. J. Sil. Univ. Technol. Ser. Transp. 2018, 99, 65–77. [Google Scholar] [CrossRef]
- Lubin, T.; Mezani, S.; Rezzoug, A. Experimental and theoretical analyses of axial magnetic coupling under steady-state and transient operations. IEEE Ind. Electron. Mag. 2014, 61, 4356–4365. [Google Scholar] [CrossRef] [Green Version]
- Sudano, A.; Accoto, D.; Zollo, D.; Guglielmelli, E. Design, Development and Scaling Analysis of a Variable Stiffnes Magnetic Torsion Spring. Int. J. Adv. Robot. Syst. 2013, 10, 1–11. [Google Scholar] [CrossRef]
- VanderBorght, B.; Albu-Schaeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.; Carloni, R.; Catalano, M.G.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable impedance actuators: A review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef] [Green Version]
- Yang, T. The Principles and Structure of Variable-Inertia Flywheels. European Patent EP 0508790 (A1), 19 February 1997. Available online: https://patents.google.com/patent/EP0508790A1/zh (accessed on 18 September 2020).
- Lewis, O.G. Variable Inertia Liquid Flywheel. U.S. Patent 3248967, 3 May 1966. Available online: http://www.freepatentsonline.com/3248967.pdf (accessed on 18 September 2020).
- Walkowc, J. Active Torsional Vibration Damper. U.S. Patent 5678460A, 21 October 1997. [Google Scholar]
- Kadomukai, Y.; Yamakado, M.; Nakamura, Y. Torque Controlling Apparatus for Internal Combustion Engine. U.S. Patent 4922869, 8 May 1990. Available online: https://patents.google.com/patent/US4922869 (accessed on 18 September 2020).
- Vadamalu, R.S.; Beidl, C.; Hohenberg, G.; Muehlbauer, K. Active torsional vibration reduction: Potential analysis and controller development for a belt-driven 48 V system. Automot. Engine Technol. 2019, 4, 139–151. [Google Scholar] [CrossRef]
- Przybyłowicz, P.M. Torsional vibration control by active piezoelectric system. J. Theor. Appl. Mech. 1995, 33, 809–823. [Google Scholar]
- Hughes, A. Electric Motors and Drives: Fundamentals, Types and Applications, 3rd ed.; Elsevier: Oxford, UK, 2006. [Google Scholar]
- Homišin, J. Characteristics of pneumatic tuners of torsional oscillation as a result of patent activity. Acta Mech. Autom. 2016, 10, 316–323. [Google Scholar] [CrossRef] [Green Version]
- Homišin, J. Static optimisation of mechanical systems based on the method of extremal regulation. Sci. J. Sil. Univ. Technol. Ser. Transp. 2019, 103, 15–29. [Google Scholar] [CrossRef]
- Čopan, P. Application of new Tuning Method of Torsional Oscillating Mechanical Systems. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 2014. (In Slovak). [Google Scholar]
- Pešík, L.; Skarolek, A.; Kohl, O. Vibration Isolation Pneumatic System with a Throttle Valve. In The Latest Methods of Construction Design; Dynybyl, V., Berka, O., Petr, K., Lopot, F., Dub, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 75–79. [Google Scholar] [CrossRef]
- Kaššay, P.; Homišin, J.; Urbanský, M. Formulation of Mathematical and Physical Model of Pneumatic Flexible Shaft Couplings. Sci. J. Sil. Univ. Technol. Ser. Transp. 2012, 76, 25–30. [Google Scholar] [CrossRef]
- Homišin, J.; Kaššay, P.; Puškár, M.; Grega, R.; Krajňák, J.; Urbanský, M.; Moravič, M. Continuous tuning of ship propulsion system by means of pneumatic tuner of torsional oscillation. Int. J. Marit. Eng. 2016, 156, A231–A238. [Google Scholar] [CrossRef]
- Kaššay, P. Modeling, Analysis and Optimization of Torsional Oscillating Mechanical Systems. Ph.D Thesis, Technical University of Košice, Košice, Slovakia, 2014. (In Slovak). [Google Scholar]
- Homišin, J.; Kaššay, P. Optimal tuning method of ships system by means of pneumatic tuner of torsional oscillations. Acta Mech. Slov. 2009, 13, 38–47. [Google Scholar] [CrossRef] [Green Version]
- Homišin, J.; Urbanský, M. Partial results of extremal control of mobile mechanical system. Diagnostyka 2015, 16, 35–39. [Google Scholar]
- Urbanský, M.; Kaššay, P. The new realized mobile device for extremal control research and presentation. Sci. J. Sil. Univ. Technol. Ser. Transp. 2015, 89, 173–178. [Google Scholar] [CrossRef]
- DEWETRON Homepage. Available online: https://www.dewetron.com/products/components-and-sensors/rpm-angle-sensors/ (accessed on 17 July 2020).
- Zhang, P. Advanced Industrial Control Technology, 1st ed.; Elsevier: Oxford, UK, 2010. [Google Scholar]
- Urbanský, M.; Homišin, J.; Čopan, P. Examination of mechanical system response to gaseous media pressure changes in the pneumatic coupling. Sci. J. Sil. Univ. Technol. Ser. Transp. 2013, 81, 143–149. [Google Scholar]
- Uradnicek, J.; Kraus, P.; Musil, M.; Bachraty, M. Modeling of frictional stick slip effect leading to disc brake noise vibration and harshness. In Proceedings of the 23rd International Conference, Svratka, Czech Republic, 15–18 May 2017; pp. 1002–1005. [Google Scholar]
- Kraus, P.; Uradnicek, J.; Musil, M.; Bachraty, M.; Hulan, T. Thermo-Structural brake squeal fem analysis considering temperature dependent thermal expansion. Eng. Mech. 2018, 24, 429–432. [Google Scholar]
- Musil, M.; Suchal, A.; Uradnicek, J.; Kraus, P. The Complex eigenvalue analysis of brake squeal using finite element method. In Proceedings of the 22nd International Conference, Svratka, Czech Republic, 9–12 May 2016; pp. 406–409. [Google Scholar]
- Vinas, J.; Brezinova, J.; Guzanova, A. Tribological properties of selected ceramic coatings. J. Adhes. Sci. Technol. 2013. [Google Scholar] [CrossRef]
- Hudák, R.; Šarik, M.; Dadej, R.; Živčák, J.; Harachová, D. Material and Thermal Analysis of Laser Sinterted Products. Acta Mech. Autom. 2013, 7, 15–19. [Google Scholar] [CrossRef]
- Živčák, J.; Šarik, M.; Hudák, R. FEA Simulation of Thermal Processes during the Direct Metal Laser Sintering of Ti64 Titanium Powder. Measurement 2016, 94, 893–901. [Google Scholar] [CrossRef]
- Tlach, V.; Cisár, M.; Kuric, I.; Zajačko, I. Determination of the Industrial Robot Positioning Performance. Modern Technologies in Manufacturing. Available online: https://www.matec-conferences.org/articles/matecconf/abs/2017/51/matecconf_mtem2017_01004/matecconf_mtem2017_01004.html (accessed on 22 June 2020).
- Brezinova, J.; Guzanova, A. Friction Conditions during the Wear of Injection Mold Functional Parts in Contact with Polymer Composites. J. Reinf. Plast. Compos. 2010, 29, 1712–1726. [Google Scholar] [CrossRef]
- Toth, T.; Zivcak, J. A Comparison of the Outputs of 3D Scanners. Procedia Eng. 2014. [Google Scholar] [CrossRef] [Green Version]
- Kučera, P.; Píštěk, V. Testing of the Mechatronic Robotic System of the Differential Lock Control on a Truck. Int. J. Adv. Robot. Syst. 2017, 14, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Kniewald, D.; Guzanova, A.; Brezinova, J. Utilization of Fractal analysis in strength prediction of adhesively-bonded joints. J. Adhes. Sci. Tech. 2008, 22, 1–13. [Google Scholar] [CrossRef]
- Kučera, P.; Píštěk, V.; Prokop, A.; Řehák, K. Measurement of the powertrain torque. In Proceedings of the Engineering Mechanics, Svratka, Czech Republic, 14–17 May 2018; pp. 449–452. [Google Scholar]
- Kuric, I. New Methods and Trends in Product Development and Planning. In Proceedings of the 1st International Conference on Quality and Innovation in Engineering and Management (QIEM), Cluj Napoca, Romania, 17–19 March 2011; pp. 453–456. [Google Scholar]
- Kučera, P.; Píštěk, V. Prototyping a System for Truck Differential Lock Control. Sensors 2019, 19, 3619. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Puškár, M.; Kopas, M.; Puškár, D.; Lumnitzer, J.; Faltinová, E. Method for reduction of the NOx emissions in marine auxiliary diesel engine using the fuel mixtures containing biodiesel using HCCI combustion. Mar. Pollut. Bull. 2018. [Google Scholar] [CrossRef] [PubMed]
- Jasminská, N.; Brestovič, T.; Puškár, M.; Grega, R.; Rajzinger, J.; Korba, J. Evaluation of hydrogen storage capacities on individual adsorbents. Measurement 2014. [Google Scholar] [CrossRef]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Homišin, J.; Kaššay, P.; Urbanský, M.; Puškár, M.; Grega, R.; Krajňák, J. Electronic Constant Twist Angle Control System Suitable for Torsional Vibration Tuning of Propulsion Systems. J. Mar. Sci. Eng. 2020, 8, 721. https://doi.org/10.3390/jmse8090721
Homišin J, Kaššay P, Urbanský M, Puškár M, Grega R, Krajňák J. Electronic Constant Twist Angle Control System Suitable for Torsional Vibration Tuning of Propulsion Systems. Journal of Marine Science and Engineering. 2020; 8(9):721. https://doi.org/10.3390/jmse8090721
Chicago/Turabian StyleHomišin, Jaroslav, Peter Kaššay, Matej Urbanský, Michal Puškár, Robert Grega, and Jozef Krajňák. 2020. "Electronic Constant Twist Angle Control System Suitable for Torsional Vibration Tuning of Propulsion Systems" Journal of Marine Science and Engineering 8, no. 9: 721. https://doi.org/10.3390/jmse8090721