1. Introduction
Shipping, which is a relatively energy-efficient, environment-friendly and sustainable mode of mass transport of cargo [
1], is the dominant and will remain the most important transport mode for world trade [
2]. However, the shipping industry consumes more fuel in comparison with other transport modes [
3] and shipping-related emissions contribute significantly to the global air pollution and long-term global warming [
4,
5]. Correlated with fuel consumption, shipping is responsible for approximately 3.1% of annual global CO
2 and approximately 2.8% of annual GHGs (greenhouse gases) on a CO
2e (CO
2 equivalent) basis [
6]. Approximately 15% and 13% of global human-made NOx and SOx emissions come from the shipping industry. It is projected that maritime CO
2 emissions will increase significantly by 50% to 250% in the period up to 2050 [
6]. Moreover, as fuel cost accounts for approximately 50% to 60% of the total operational cost of a ship [
7], a significant fuel consumption reduction will contribute to a considerable save of a ship’s operational cost. Consequently, the shipping industry is striving to reduce its fuel consumption and emissions due to the increasingly high fuel price, social concerns on the environmental impact and the resulting mandatory and strict emission control regulations worldwide [
8].
Ship mission profile during the voyage has a significant influence on the fuel consumption and exhaust emissions of ships [
9]. Therefore, the ship mission profiles should be taken into consideration when evaluating ship transport performance [
10]. However, one of the major drawbacks of the present IMO (International Maritime Organization)’s EEDI (Energy Efficiency Design Index) is that it only considers one operating point without taking the ship’s representative mission profiles into account. On the contrary, the EEOI (energy efficiency operational indicator), which is also developed by IMO, is calculated for a voyage or a number of voyage legs based on real operating conditions [
11]. In [
12], based on a case study of a handy size Chemical/Product Tanker of 38,000 DWT (Deadweight tonnage), Acomi, et al. investigate the voyage energy efficiency by calculating the EEOI of the ship using both commercial software and onboard measures. In [
13], in the case study of a RoPax vessel, Coraddu et al. estimate the ship operational performance of the ship voyage using the EEOI as the measure by real data statistics and numerical simulations. In [
14], Hou et al. optimise the vessel speed of an ice zone ship to find a minimum EEOI in an ice zone. In [
15], in the case study of a VLCC (Very Large Crude Carrier) tanker, Safaei et al. address the reduction in fuel consumption of the ship voyage using route optimisation considering ship profile and sea conditions. In [
16], in the case study of a bulk carrier, Zaccone et al. develop a 3D dynamic programming optimisation method to select the optimal path and speed profile for the ship voyage aiming to minimise the voyage fuel consumption and taking also into account ship safety and comfort. However, most of the research focuses on route planning and ship speed profile when studying the ship voyage optimisation. During ship operation, propulsion control [
17,
18], power management [
19,
20,
21] and ship operational speeds [
22,
23] will significantly influence the fuel consumption and emissions performance of ships. However, quantitative and systematic investigations on the influence of various ship operations, including propulsion control, power management and operational speeds, on the ship performance of the whole voyage are still limited.
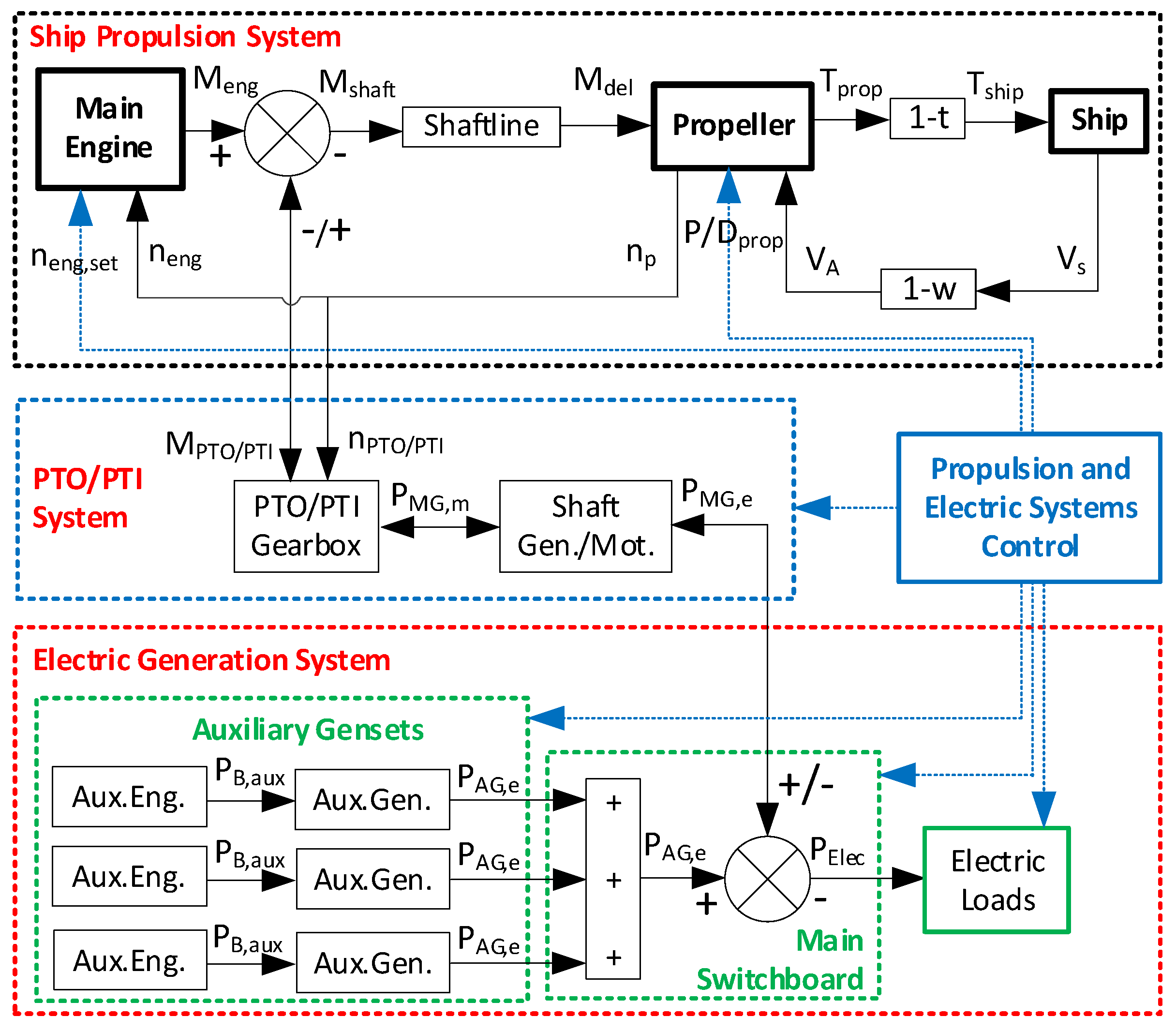
Hybrid propulsion, which is a combination of mechanical and electrical propulsion, is a promising option to improve the economic, environmental and operational performance of ships [
24,
25]. In the basic form of the hybrid propulsion system, the propeller can be mechanically driven by an internal combustion engine and/or electrically driven by an electric motor, which may also be able to work as an electric generator. If the electric motor is powered by a hybrid power supply, such as diesel generator(s), natural gas generator(s), fuel cells and/or batteries, it will be a hybrid propulsion with a hybrid power supply system [
26]. The operation modes of a hybrid propulsion system include power take off (PTO); slow power take in (PTI); boost power take in [
27]. Among others, the benefits of a hybrid propulsion include reduced fuel consumption; reduced CO2 emissions and other pollutants; possibility to sail and operate with zero emission in coastal and port areas; greater redundancy; noise reduction; lower maintenance [
24,
28]. However, different ship types can benefit differently from the hybrid propulsion due to their diverse operational profiles [
28,
29]. In [
29], Jafarzadeh and Schjølberg study the operational profiles of eight different ship types, including tankers, bulk carriers, general cargo ships, container ships, Ro-Ro ships, reefers, offshore ships and passenger ships, aiming to identify what ship types are able to benefit from hybrid propulsion. Hybrid ship propulsion is typically applied on naval vessels, towing vessels, offshore vessels and passenger ships including ferries. However, the current applications and research of hybrid propulsion are mainly limited on small ships, while the applications and research on large ocean-going vessels are rare.
To improve the safety and operability of ocean-going cargo ships and to reduce their global greenhouse gas emissions and the local pollutant emissions in coastal and port areas, few studies on the potential applications of hybrid propulsion and power supply system on the big ocean-going cargo ships can be found. In [
30], based on a multi-physical domain model, a conceptual hybrid propulsion system for a very large crude oil carrier (VLCC) has been studied for the potential benefit of improving the ship’s safety and operability in heavy sea conditions without reducing the system efficiency. In [
31] and [
32], the potential benefits of hybrid propulsion for large ocean-going cargo vessels to increase fuel efficiency and reduce greenhouse gas emissions and pollutant emissions are investigated as well. In [
33], the impact of battery–hybrid propulsion on the fuel consumption and emissions of an ocean-going chemical tanker when sailing in coastal and port areas during port approaches has been investigated. However, it is concluded that the battery–hybrid propulsion for ocean-going cargo ships, even when only sailing at low ship speed in close-to-port areas for a short time, is still not a realistic option nowadays even though it can produce zero local emissions; the main reason is that the required battery capacity is very large and the weight of the battery becomes unacceptable.
Using LNG (liquefied natural gas) as the alternative marine fuel is another promising and attractive solution to reducing the local and regional environmental impact and operational costs of ships [
34,
35]. Compared to using conventional marine fuels, using LNG produces significantly less pollutant emissions, such as NOx, SOx and PM (particle matter), and CO
2 emissions will also be reduced as well [
24,
36]. Another driver for using LNG as a marine fuel is the current favourable fuel price compared to the increasing price of conventional fuel oil [
37]. However, one of the disadvantages in the use of LNG as marine fuel is that it may have a worse impact on climate change (global warming) than using conventional fuels, when taking the life-cycle emissions of methane (CH
4), which is a worse greenhouse gas than CO
2, into consideration [
35,
37]. Currently, a relatively small number of ships run on LNG and adopting LNG as a fuel is attractive for ships sailing on fixed routes and large ships sailing in short sea and coastal areas, especially in emission control areas (ECAs) [
38,
39,
40]. With more stricter emissions regulations coming into force and more infrastructure of LNG fuel growing worldwide, larger ocean-going vessels are expected to select LNG as a fuel in the foreseeable future [
39]. There are many publications indicating the potential benefits of using LNG as a marine fuel, however, quantitative investigations on the impact of using LNG as a fuel on the fuel consumption and emissions of ships over the whole voyage, taking the ship’s operational profile into consideration, are limited.
This paper will therefore investigate the potential influence of the application of the hybrid ship propulsion and electric power generation system with different fuels as well as various propulsion control and power management strategies on the ocean-going cargo ship in reducing the fuel consumption and emissions over the whole voyage.
The main goals and outline of this paper are:
- (1)
To introduce the conceptual hybrid propulsion and electric power generation system of a benchmark ocean-going chemical tanker (
Section 2).
- (2)
To explain the “average” indicators of the fuel consumption and emissions performance of the ship taking the ship mission profiles of both the transit voyage in open sea and manoeuvre in close-to-port areas into consideration (
Section 3).
- (3)
To present the fuel consumption and emissions models of both the main engine (two-stroke diesel engine) and the auxiliary engines (four-stroke diesel engine) as well as the model corrections on different fuel types (
Section 4).
- (4)
To introduce the ship mission profiles of the transit voyage sailing in open sea and the close-to-port manoeuvre in coastal and port areas (
Section 5).
- (5)
To quantitatively and systematically investigate the influence of the ship operational speeds, propulsion control modes, electric power generation modes, sailing on different fuel types and PTI propulsion mode on the fuel consumption and emissions performance over the whole voyage, including the transit in open sea and manoeuvre in close-to-port areas (
Section 6).
In
Section 7, the conclusions, limitations and uncertainties of the present paper and the recommendations for future work will be provided.
5. Ship Mission Profile
The sea condition in which the ship sails will be first defined. The added ship resistance in service due to sea condition, which is relative to that in sea trial condition (calm sea condition), is quantified by the sea margin (SM), which is defined by Equation (7).
where
is the ship effective power in service conditions and
is the ship effective power in sea trial condition.
The sea margin is modelled as the function of the fouling of hull and propeller, displacement, sea state and water depth. It is assumed that the ship displacement is the design displacement and does not change during the whole voyage including both transit in open sea and manoeuvre in close-to-port areas. In normal sea condition, when sailing in open sea, the ship sails in deep water and the ship resistance addition (10%) is mainly due to the sea state; while, when sailing in coastal and port areas, the ship resistance addition (10%) is mainly due to the shallow water and the effect of sea state is neglected. According to the above assumptions, in normal sea condition, the sea margins when sailing in both open sea and close-to-port area are 15% due to the combined effects of the ship fouling, displacement, sea state and water depth.
5.1. Transit in Open Sea
A combination of ship mission and sea condition profiles for three different voyages sailing at open sea of the chemical tanker has been defined as shown in
Table 4. Each voyage is divided into three parts, namely Transit A, Transit B and Transit C. In different parts of the voyage the ship speed, transport distance and sea condition, which is represented by the sea margin (SM), are different. Transit A is in a calm sea condition (low sea margin, 5%), Transit B is in heavy weather (high sea margin, 30%) and Transit C is in a normal sea condition (15% sea margin). The three voyages (I, II and III) have the same total distance (650 n miles) and the same average sea margin (15%), which is defined by Equation (8), but have different average ship speeds from fast (13.5 kn) to slow steaming (10 kn).
where
is the average sea margin of each voyage obtained by averaging the power over the whole voyage;
is the sea margin of each part of the voyage;
is the ship effective power at design draft with clean hull and calm weather;
is the time of duration in each part of the voyage.
The average ship speeds for the three voyages are systematically going down from voyage I (13.5 kn) to voyage III (10 kn) and transit time is going up accordingly. However, to make it more realistic, for voyage I with average ship speeds of 13.5 kn, the ship speeds of Transit B (where the ship is in heavy weather and the sea margin is 30%) are reduced to 12 kn, because of the high sea state, while the speed loss is assumed to be recovered in part C of the transit. For the voyage II and voyage III in which the average speeds are 12kn and 10kn, respectively, the ship speed during the whole voyage remains the same. The detailed determination of the mission profiles when the ship transits in open sea can be found in
Appendix A.
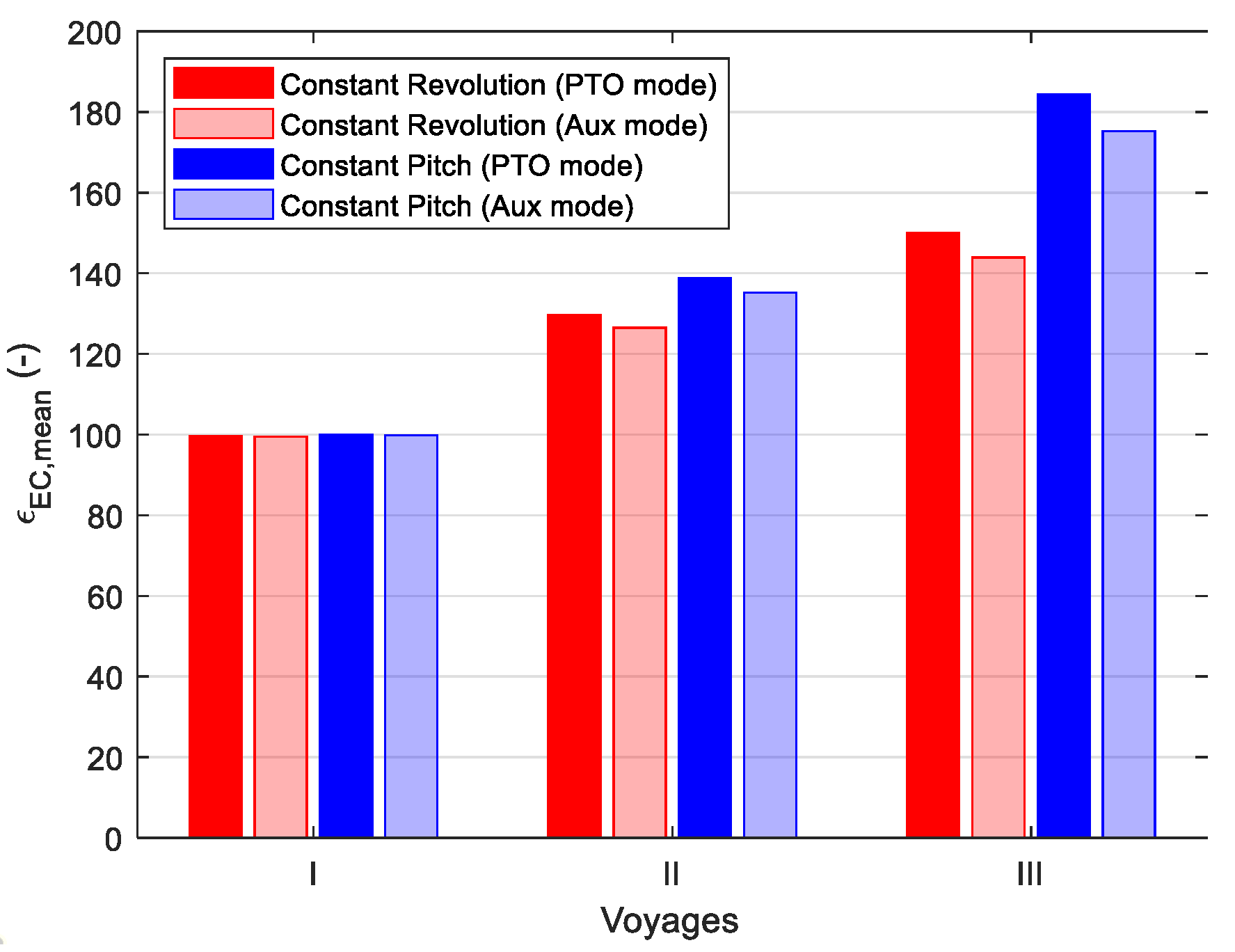
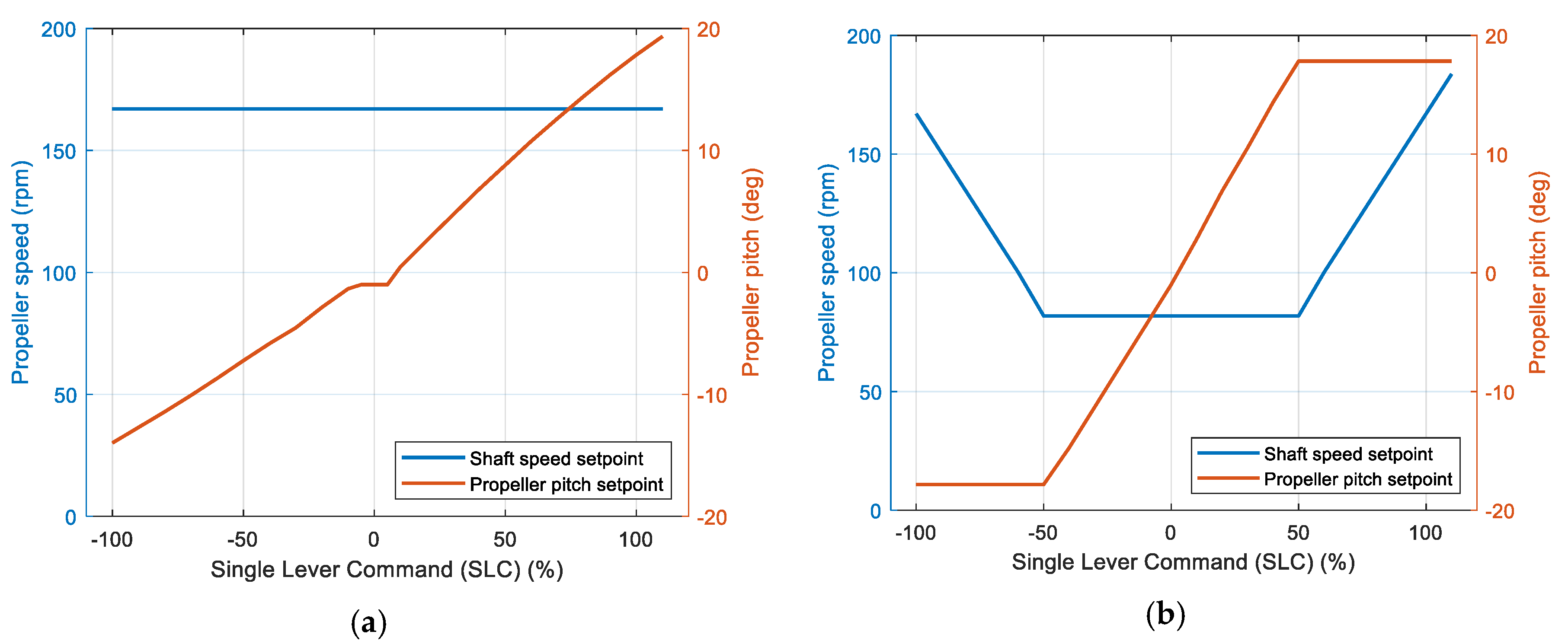
For each ship voyage, the influence of different ship propulsion control modes and electric power generation modes on the fuel consumption and emissions of the ship over the whole voyage will be investigated. The ship propulsion control modes (Constant Revolution Mode and Constant Pitch Mode) and electric power generation modes (PTO Mode and Aux Mode) have been introduced in [
41] in details and they are briefly summarised in
Table 5. The combinator curves for the two different propulsion control modes are shown in
Figure A5 in
Appendix C.
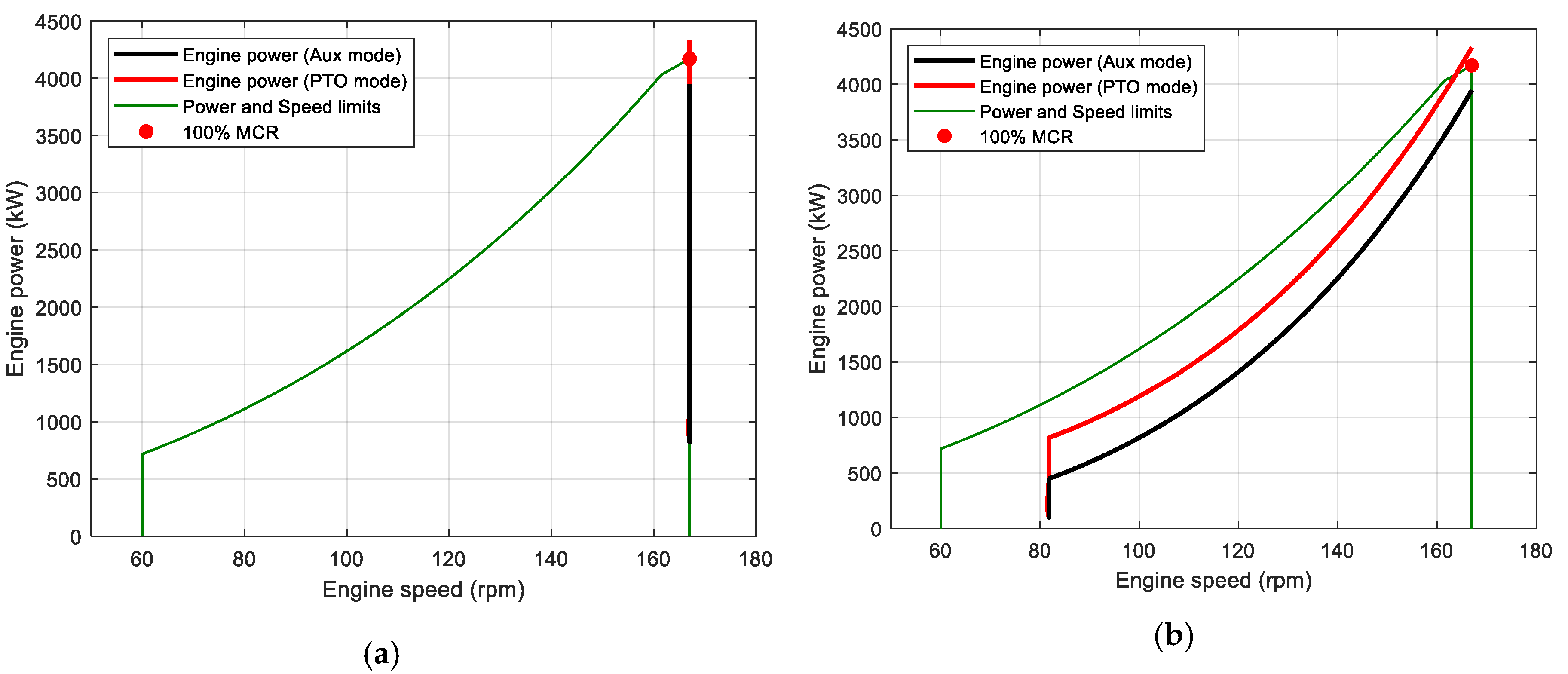
Note that, if the commanded ship speed cannot be reached within the power limit of the main engine because of providing PTO power, the shaft generator will be shut down and the electric power needed by the ship will be supplied by auxiliary generators, such as Transit A and Transit C of voyage I during which the PTO switch is turned off and the main engine only provides power for propulsion due to the demanded high ship speeds under the corresponding sea margin shown in
Table 4.
5.2. Manoeuvring in Coastal and Port Areas
The ship mission profile during the close-to-port manoeuvre is shown in
Table 6. The ship speed is 7 knots in coastal areas and 5 knots in port areas. The sailing time and sailing distance of the ship in the same area are combined together, respectively, in the ship mission profile in
Table 6. In coastal areas, the total sailing distance when approaching and leaving the harbour is 40 nautical miles and the total sailing time is 5.71 h. In port areas, the total sailing distance is 10 nautical miles and the total sailing time is 2 h. The sea margin when the ship is sailing in coastal and port areas is assumed to be normal, i.e., 15% sea margin, and the added ship resistance is because of the smaller depth in coastal and port areas compared with the open sea, where the sea state is the main reason for the added ship resistance.
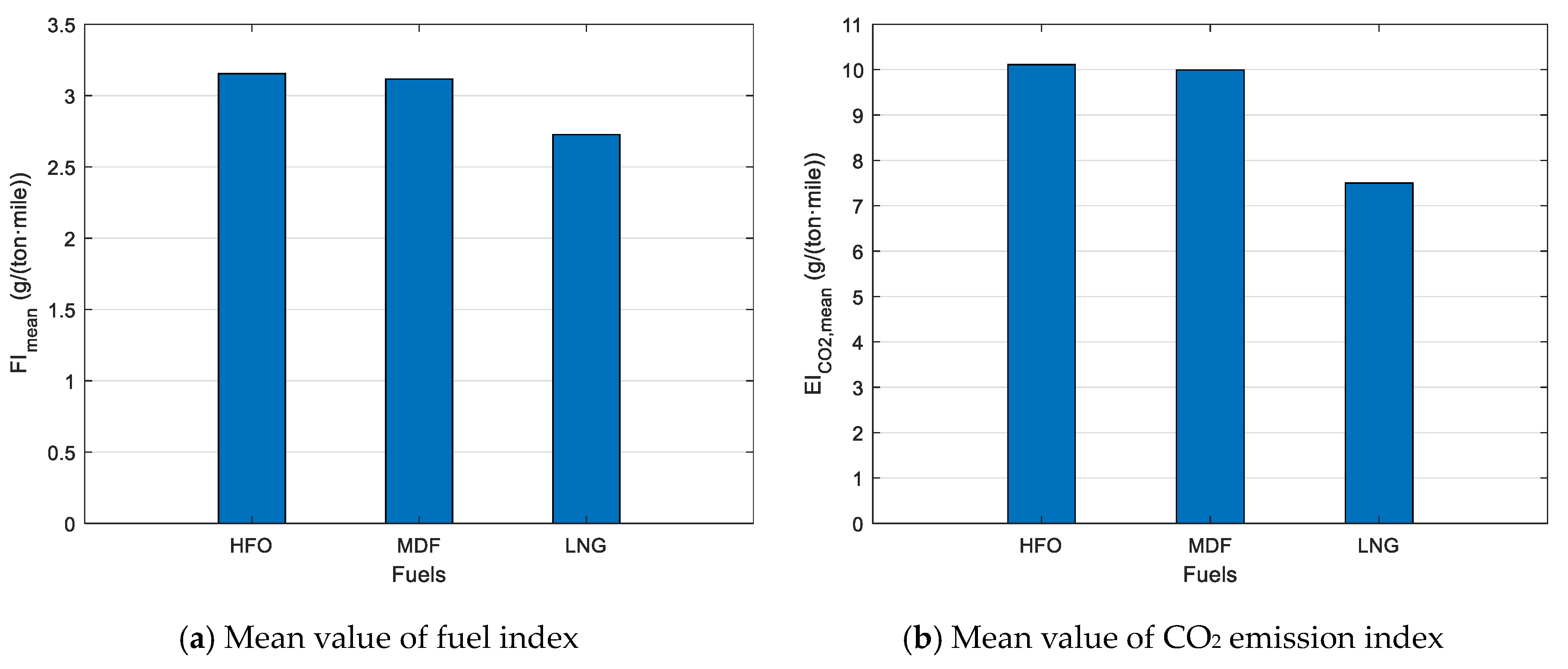
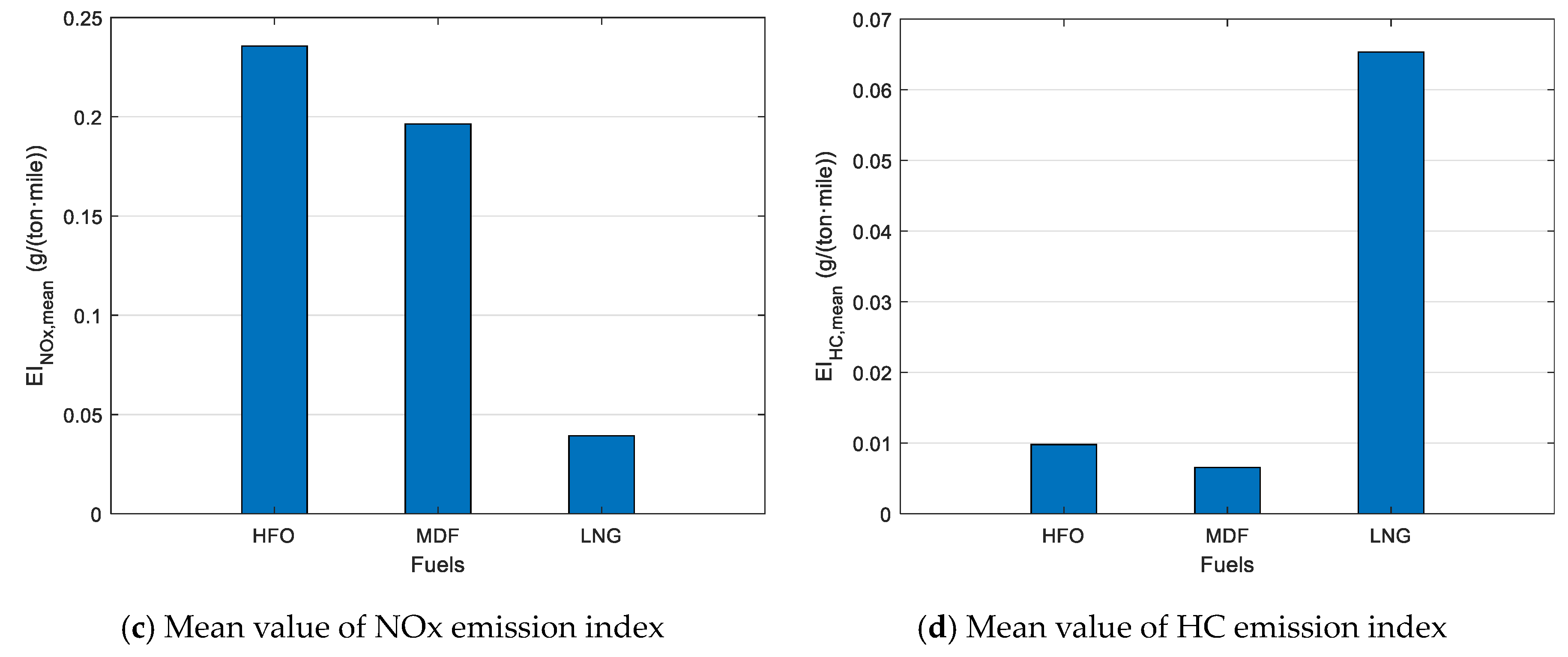
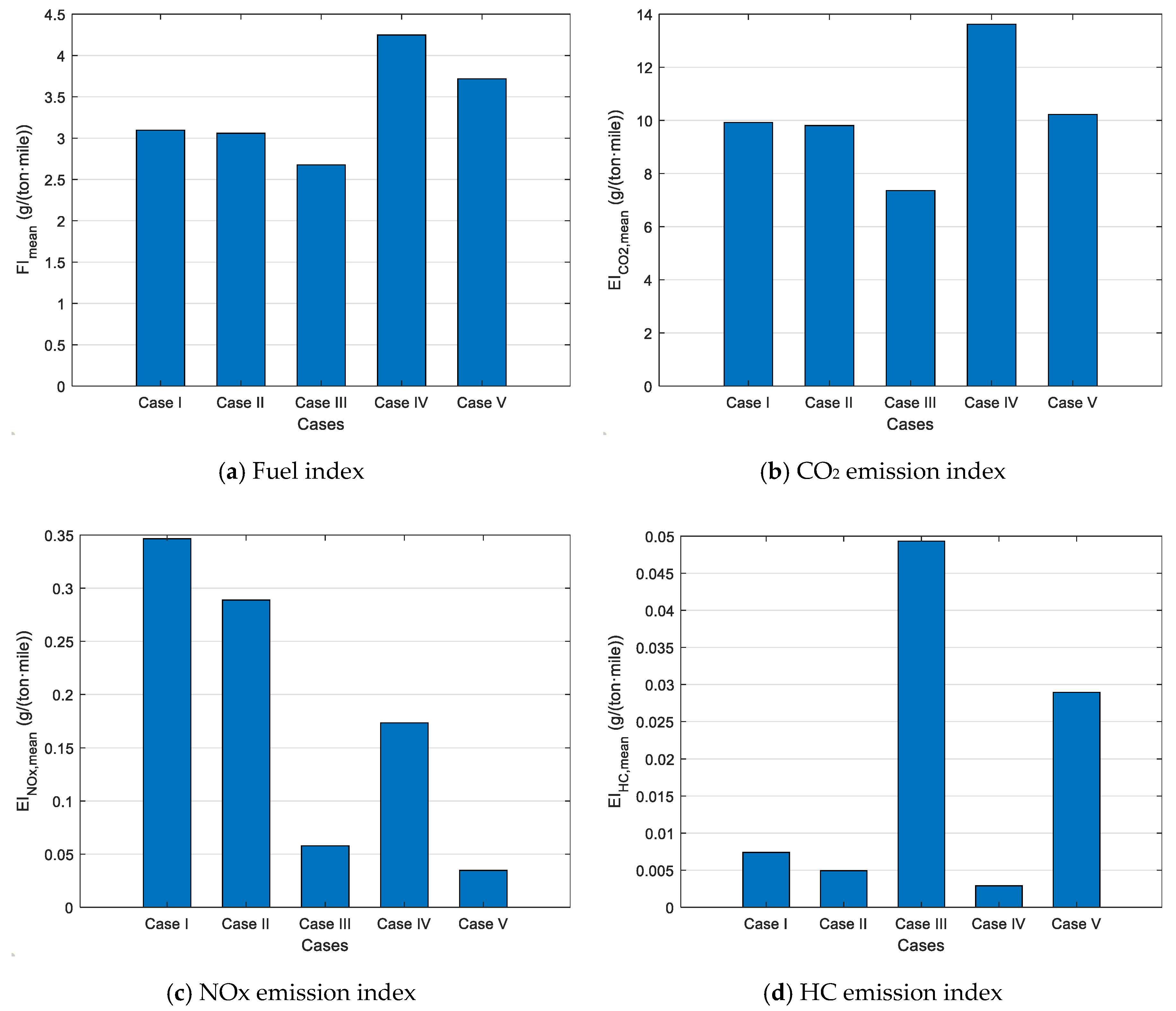
Five different operation cases of the ship are studied to investigate the influence of the ship propulsion and the electric generation modes of a hybrid propulsion ship on the fuel consumption and emissions performance during the close-to-port manoeuvre.
In case I, the main engine burning heavy fuel oil (HFO) provides power for the ship propulsion and onboard electric loads through shaft generator in PTO mode, while the auxiliary engines are shut down.
In case II, it is the same as case I except that the fuel burnt by the main engine is changed from heavy fuel oil (HFO) to marine diesel fuel (MDF).
In case III, it is also the same as case I except that the fuel for the main engine is changed from HFO to LNG (liquefied natural gas).
In case IV, the auxiliary engines burning marine diesel fuel (MDF) provide power for the ship propulsion through shaft motor in PTI mode and onboard electric loads, while the main engine is shut down.
In case V, it is the same as case IV except that the fuel for the auxiliary engines is changed from MDF to LNG.
So, in case I, case II and case III, the ship propulsion system works in PTO mode but on different fuels; while in case IV and case V, the ship propulsion system works in PTI mode but on different fuels. Only the constant revolution mode, in which the ship speed is controlled by changing the propeller pitch and the propeller revolution is kept constant, will be studied during the close-to-port manoeuvre.
7. Conclusions and Recommendations
In this paper, the influences of the ship propulsion control modes, electric power generation modes, ship operational speeds, propulsion modes as well as sailing on different fuels on the fuel consumption and emissions of an ocean-going benchmark chemical tanker have been investigated taking the ship’s operational profiles into account. The current IMO’s EEDI considers only one operating point when estimating ship energy efficiency, however, a lower EEDI does not necessarily mean less ship fuel consumption and emissions when sailing with a certain mission profile over the whole voyage. So, the mean value indicators weighted over the ship mission profile should be used when estimating the fuel consumption and emissions performance of the ship over the voyage.
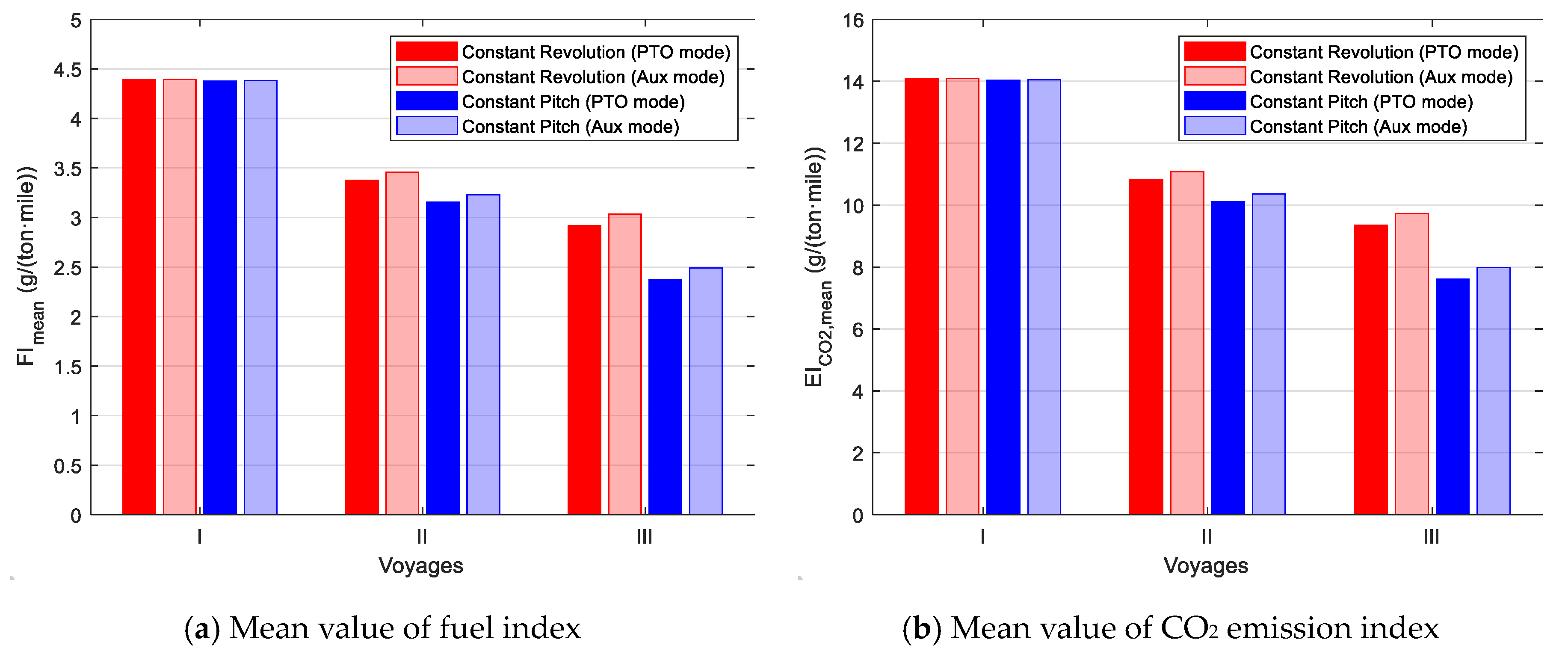
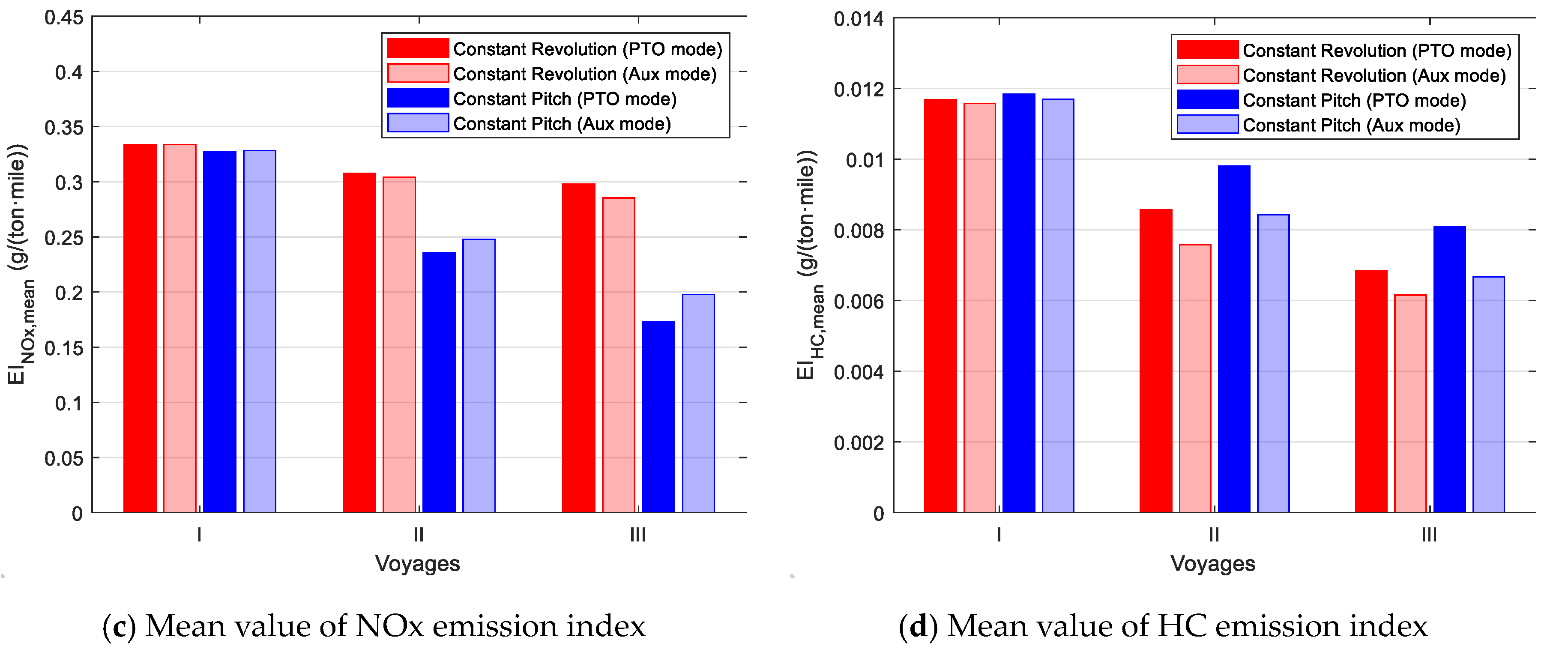
When transiting in open sea, reducing the ship average operational speed will effectively reduce both the fuel consumption and emissions of the ship over the voyage. To reduce the ship operational speed, reducing the propeller revolution rather than the propeller pitch is more preferable, as pitch reduction will reduce the propeller efficiency and consequently increase the fuel consumption especially for voyage where the ship speed is reduced. Generating the electric power by the shaft generator (PTO mode) rather than the auxiliary generator (Aux mode) will further reduce the fuel consumption while the NOx and HC emissions could increase. However, compared to the propulsion control modes, the electric generation modes have relatively minor influence on fuel consumption and emissions of the ship.
When the ship is sailing and manoeuvring in the coastal and port areas, changing the fuel for the main engine from heavy fuel oil (HFO) to marine diesel fuel (MDF) will reduce the NOx and HC emissions significantly while slightly reducing the fuel consumption and CO2 emissions. Providing the power for ship propulsion (PTI mode) and onboard electric loads by the auxiliary engines and shutting down the main engine will further reduce the local NOx and HC emissions significantly while the fuel consumption and CO2 emission will increase notably mainly due to the lower engine efficiency of the auxiliary engines.
Using LNG (liquefied natural gas) as the fuel for both the main and auxiliary engines will reduce the NOx emission significantly compared to using HFO (heavy fuel oil) or MDF (marine diesel fuel). So, sailing the ship on LNG in close-to-port areas will produce much less local environmental impact due to the much less local pollutant emissions. In particular, sailing the ship in PTI mode on LNG will further reduce the local pollutant emissions in coastal and port areas. The fuel consumption and CO2 emission of the ship will also decrease notably over the whole voyage when sailing on LNG instead of HFO and MDF. However, the hydrocarbon (HC) emission is much higher when using LNG as a marine fuel than traditional diesel fuel due to the methane (CH4) slip and unburnt methane during engine operations and although it has no direct effects on human health, it may have a worse impact on climate change (global warming) when taking the life-cycle emissions of natural gas into consideration (although the lifetime of the emitted substance should then also be taken into account, which is outside the scope of this paper). It is clear either way that methane emissions from LNG engines should be minimised as much as possible.
Last but not least, there are still some limitations and uncertainties existing in this paper and these will be further studied in future work. One of the limitations is that only CO2, NOx and HC emissions are investigated and the other emissions, such as sulphur oxides (SOx), particulate matter (PM) and soot (C), etc., generated by the ship are not considered. Another limitation is that only fuel consumption and emissions are investigated in this paper while the ship capital expenditure (CAPEX), operating expenditure (OPEX) and the operational safety of both the engine and ship have been left outside the scope. The uncertainty is in the simplistic assumption on the fuel consumption and emission performance of the engines when using LNG as the fuel. In future work, in addition to improving the fuel consumption and emissions models, the potential influence of the application of the hybrid propulsion and alternative fuels on the CAPEX and OPEX of the ship, and the operational safety of both the engine and ship especially in adverse sea conditions will be investigated. The trade-off relationships between the ship CAPEX and OPEX, and between the energy effectiveness of the ship and the operational safety, need to be investigated.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













