1. Introduction
Since their introduction in the 1970s, unbonded flexible risers have proved an effective and reliable solution for the transfer of fluids in the offshore environment. In contrast to steel risers, flexible risers are able to deform and reposition in response to external loading without incurring damage [
1,
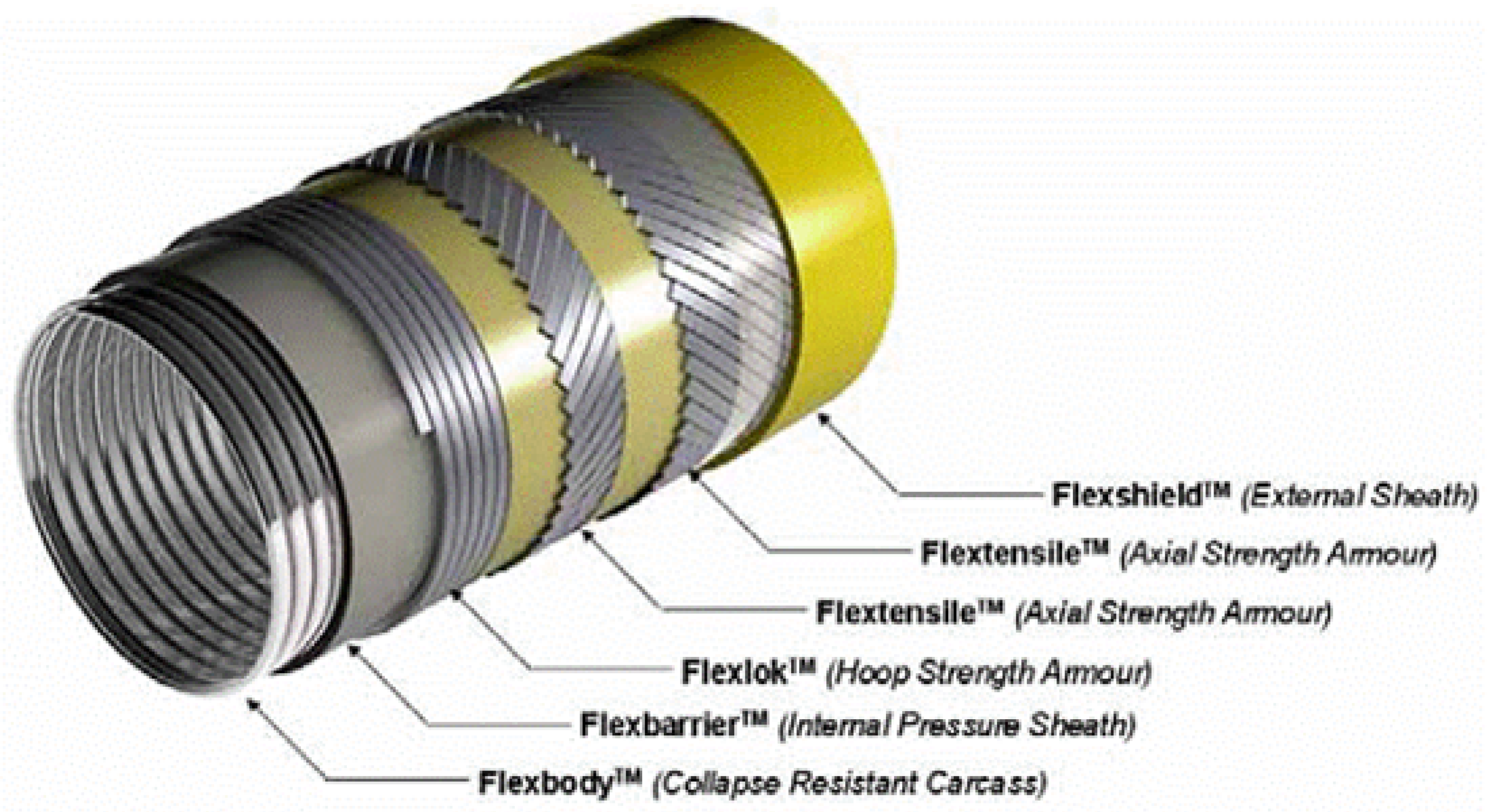
2]. This flexibility is a consequence of the structure of flexible pipes, which includes multiple layers consisting of wound steel profiles and extruded polymers (
Figure 1). However, the current trend towards production in deeper waters have led to new failure modes arising, such as buckling of helical wires, threatening long-term integrity. These failure modes are often progressive in nature and challenging to predict [
1]. In addition, accurate determination of the fatigue damage is necessary to ensure that life prediction of ageing flexible risers can be made with confidence.
In distinction to bonded risers using composite materials, for which finite-element based structural analysis has been demonstrated by Sun et al. [
3], Amaechi et al. [
4], among others, the analysis of unbonded flexible risers presents unique challenges as their performance relies on the ability of internal components to slide relative to each other (constrained by geometry and friction) to relieve load. Nevertheless, the multiscale methods presented in this article are also applicable to the analysis of bonded composite risers.
In the following, we describe models and processes used in a numerical multiscale procedure for the analysis of flexible pipes/risers. In this procedure, local and global models are integrated in order to obtain greater accuracy. Two versions of this integration have been developed, a fully-integrated procedure and a sequentially-integrated procedure. Firstly, we present a local finite element (FE) model and show results for various elementary loadings. Secondly, we describe a section response model that aims to capture the nonlinear relationship between stress resultants and section deformation measures noted in flexible pipes. This model is then calibrated using simulation results from the FE model. Thirdly, procedures for combining these models in multiscale analysis are described. A simplified demonstration of the integrated multiscale procedure and validation of the global analysis model are shown.
A beam element formulation for the global dynamical analysis of flexible risers was earlier presented by McNamara et al. [
5], who introduced the mixed formulation adopted in the current work. Yazdchi and Crisfield [
6] describe a 2D corotational beam element for representing flexible risers including shear deformations and the derivation of load stiffness matrices. Higher order effects such as the influence of curvature on buoyancy are included. Related work by the same authors [
7] extends this approach for 3D elements and loading. A detailed formulation for flexible polymer hoses used as used in the drilling industry is presented by Monprapussorn et al. [
8]. This treatment includes large deformations, coupled radial-axial deformations and, in addition, interactions between both of these effects with the internal flow. This work, despite providing a thorough treatment of internal flow effects, is less relevant for unbonded flexible risers used in production, as pipe walls cannot be represented as thin-walled pipes with linear elastic behaviour.
Several software packages have been developed for global dynamic analysis of flexible risers. The underlying numerical approaches used in these packages include both classical finite element methods and lumped-mass and -stiffness approaches. Packages available commercially include Orcaflex, Flexcom, Riflex and Deepflex. Local analysis tools for flexible pipes include purely analytical formulations, finite element models and analytical formulations solved by numerical means. One significant challenge in local analysis is the accurate calculation of the displacement of the initially helical armours as the pipe bends. Additionally, the use of unrealistic boundary conditions at the end sections of the model can lead to inaccuracies in the solution. Earlier local models focussed on analytical approaches, including the derivation of linear stiffness matrices (for example, by McNamara and Harte [
9]) and analyses of pipe bending and associated wire slippage [
10,
11]. Tan et al. [
12] have shown using finite element investigations that the kinematics of tensile armour wires is complex and depends of a number of geometric parameters. An example of a detailed finite element model for flexible pipe is given by Leroy and Estrier [
13], in which contact is computed between all layers. In this model periodic boundary conditions are used to constrain relative motions at the ends of tensile wires, allowing a shorter model to predict tensile wire stresses accurately. Finite element models have also been developed by Sousa et al. [
14], who provide an analytical derivation for the properties of an orthotropic stiffness layer used as a simplification of the carcass layer and a physical basis for the penalty stiffness used to compute layer interactions. This model is employed to investigate the load redisctibution effects that occur after tensile wire failure. An alternative finite-element based approach has been developed by Sævik and co-workers [
15], in which novel finite elements are used to discretise tensile wires and their interactions. This model has subsequently been commercialised in the package BFLEX. An analytical-numerical approach is described by Østergaard et al. [
16], based on a formulation of wire kinematics and dynamics resulting in six coupled differential equations, which are solved numerically.
Approaches for combining local and global models include methodologies developed by Caleyron et al. [
17], who combine instances of a short finite element model with a virtual spine formed with kinematic constraints to represent a section of flexible riser under a bend stiffener. The application of global loads (tension, constant curvature and torsion) to the spine governs the loading on the component local models. An alternative approach is shown by Majed et al. [
18], in which modal superposition-type approaches are used to reduce the computational effort required for a detailed finite element model. This approach requires bending-moment curvature data to be provided so that nonlinearity in pipe response can be incorporated. Earlier development on the multiscale methodology presented in the current work was detailed by Edmans et al. [
19,
20,
21,
22].
Analysis problems where features of geometry, physical phenomena and mechanisms and/or behaviour of interest are described or defined at different scales arise frequently in solid and structural mechanics. In the field of composite materials, computational homogenisation has been proposed as a numerical method for handling such situations [
23,
24]. In this approach, a detailed characterisation of the small-scale structure is created that is large enough to be representative of the structure’s geometry and capture all relevant phenomena. The solution procedure then uses a homogenised large-scale representation within which the detailed representation acts as the constitutive model (for an example, see Geers et al. [
25]). The procedure allows for different modelling approaches (e.g., element choice), numerical schemes and incrementation to be used for the component models, increasing computational efficiency. The work of Sacco [
26] serves as an example of the broad scope of this technique, where the application of a variant of this technique to investigate crack growth in masonry walls is described.
4. Detailed Finite Element Modelling
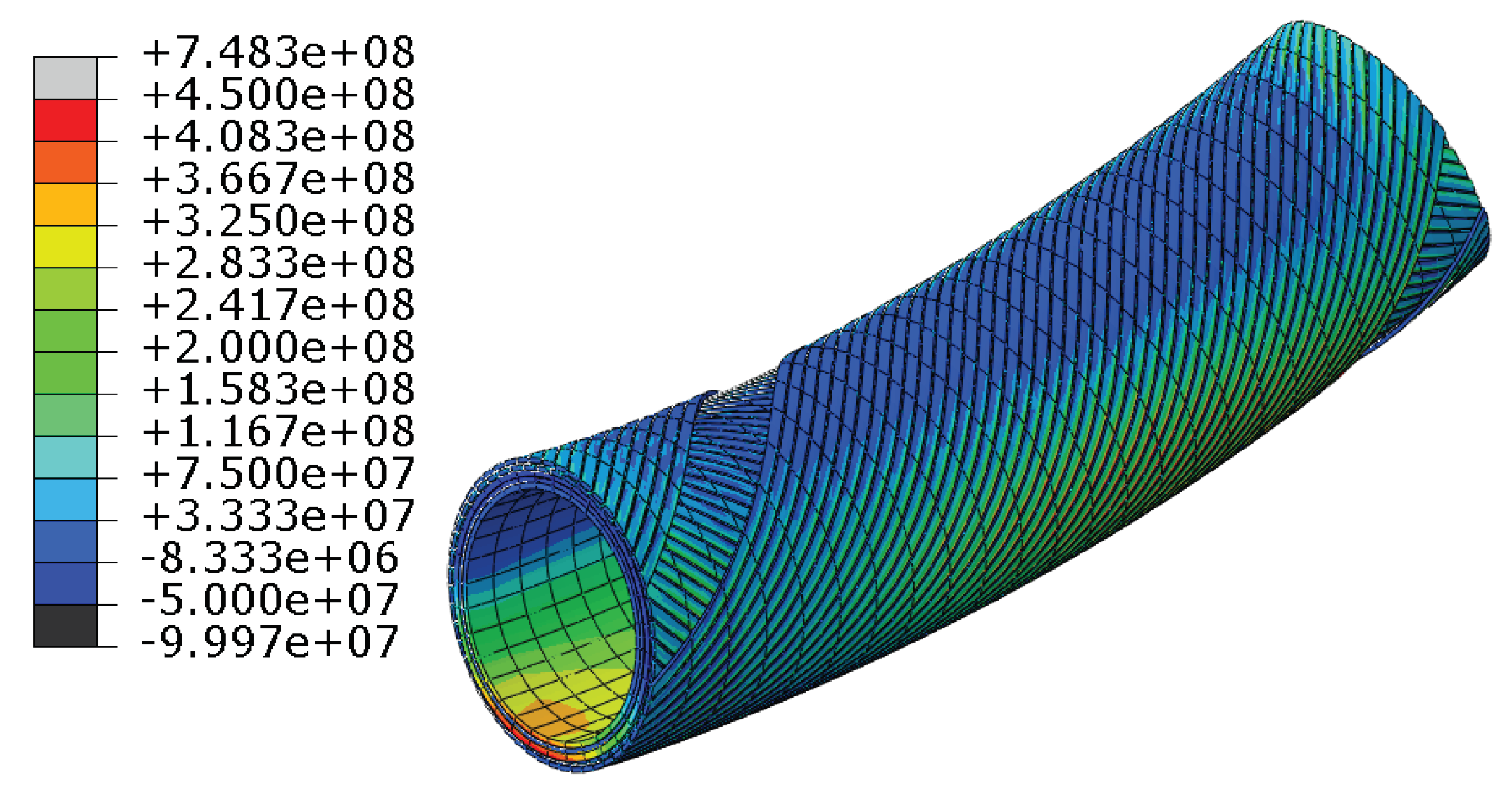
Abaqus/CAE was used to create a detailed three-dimensional flexible pipe representation, shown in
Figure 4. All constituent parts of the modelled pipe were represented as separate geometric entities. Frictional contact interactions discretised using a surface-to-surface method was defined between all surfaces, using a Coulomb friction coefficient of 0.1. Simulations were carried out using a nonlinear implicit static solver to avoid solution drift. The carcass and pressure armour layers in a flexible pipe (see
Figure 1) are self-interlocking helices with complex profiles. To reduce complexity in the model, these layers were modelled as homogeneous cylinders with orthotropic material properties.
Table 1 summarises the properties of the layers used in the model. The default length of the model is set to equal one pitch length of the tensile wires, in order to take advantage of the periodic nature of the structure, leading to a model containing nearly 200 000 nodal degrees of freedom. A parametrized Python script was developed to allow automatic generation of flexible pipe models of arbitrary dimensions and layer configuration. Boundary conditions for the model created by the generator allowed the restrictions present at end-fittings to be imposed; alternatively, a custom form of boundary conditions was implemented to approximate conditions far from end-fittings (periodic boundary conditions), as detailed in
Section 5.3.
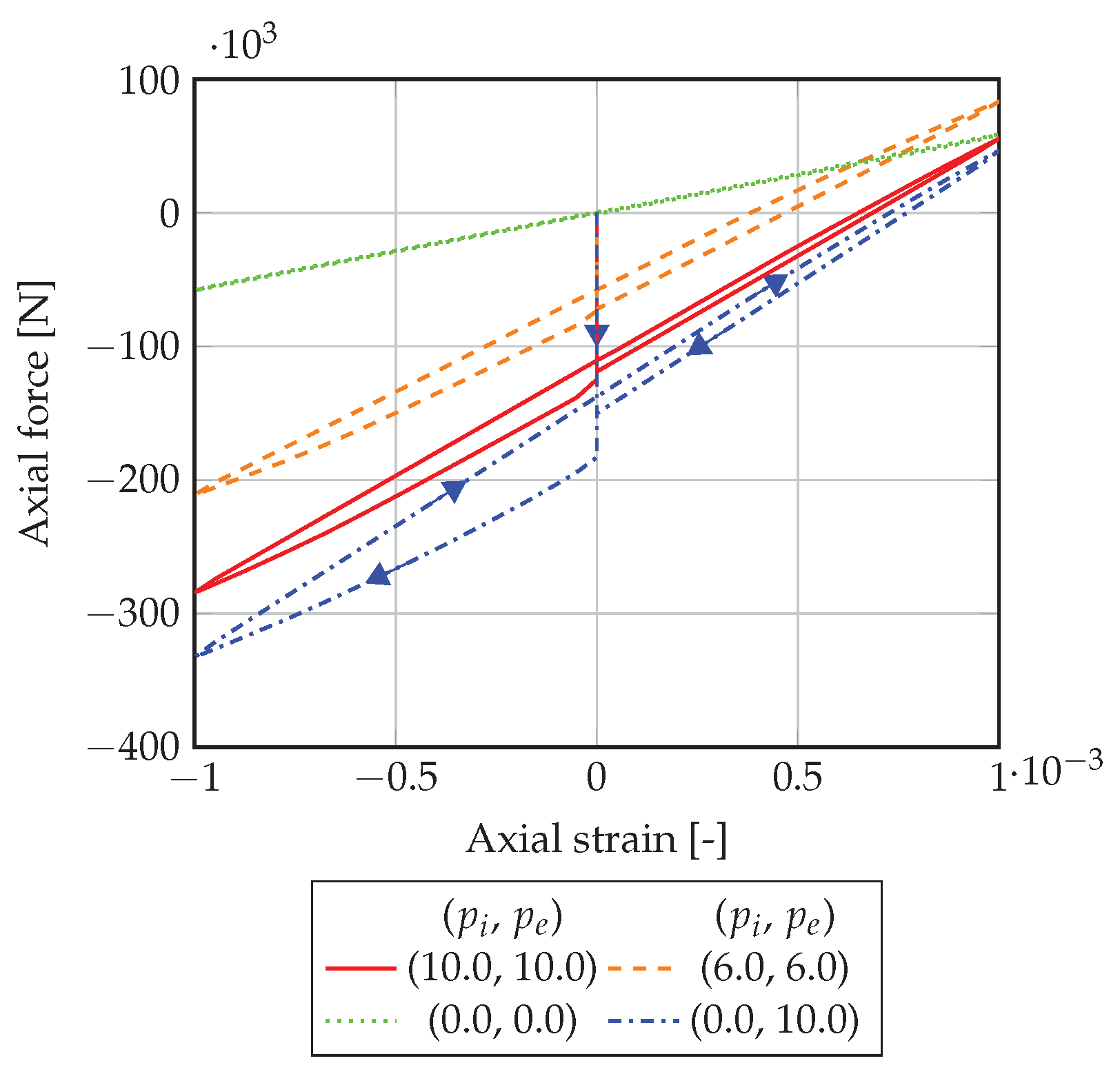
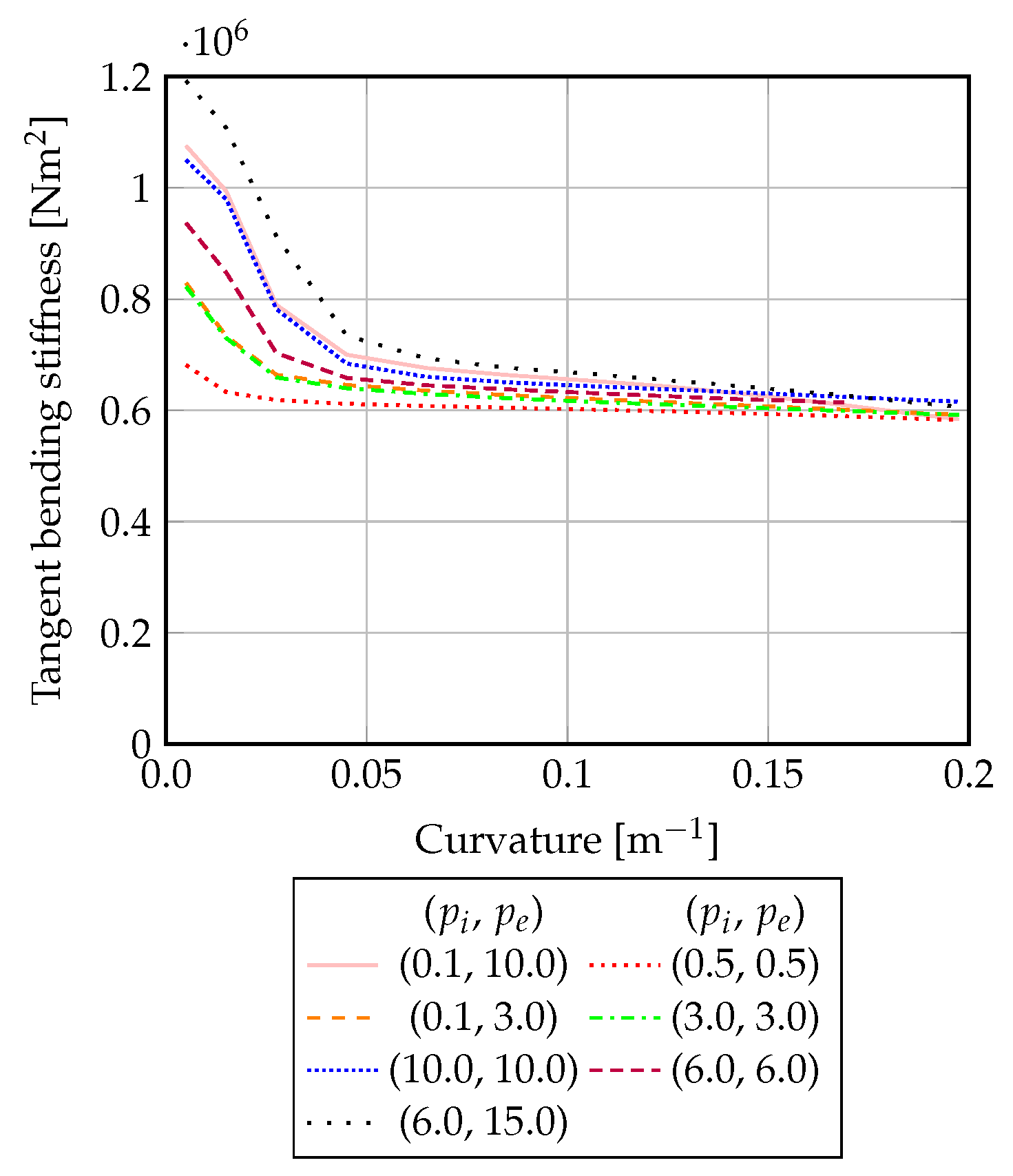
A set of axial, bending and torsional tests were carried out on the model to generate response data. Displacement control was used such that axial extension, torsion and net curvature in the pipe model were either constrained to be zero or prescribed to vary cyclically. Simulations were carried out on this model for a range of values of internal and external pressure. Selected axial, torsional and bending response data generated are shown in
Figure 5,
Figure 6 and
Figure 7, respectively. (Refer to online version of this article for colored plots.) Typical stress results in the tensile wires are shown in
Figure 4.
From the response plots, it is evident that pressure effects give rise to initial tension and torque, as well as increasing axial, torsional and bending stiffness. The increase in bending stiffness with pressure will lead to wider hysteresis loops under cyclic bending, which is consistent with results from cyclic bending tests reported by Skallerud [
32] and Kebadze and Kraincanic [
10] although Witz [
11] shows results in which average bending stiffness is reduced at very high internal pressure. For local stress results, variation of stress across the width of tensile wires shows that local curvature effects are captured.
5. Multiscale Analysis Procedures
Due to the structural complexity of unbonded flexible risers, detailed FE modeling of full-length flexible pipes including individual riser layers is challenging and computationally expensive. A global-local modeling approach is therefore desirable. Multi-scale modeling of complex structures can follow a sequential local-global approach or a “nested approach”.
5.1. Sequential Multiscale Modeling
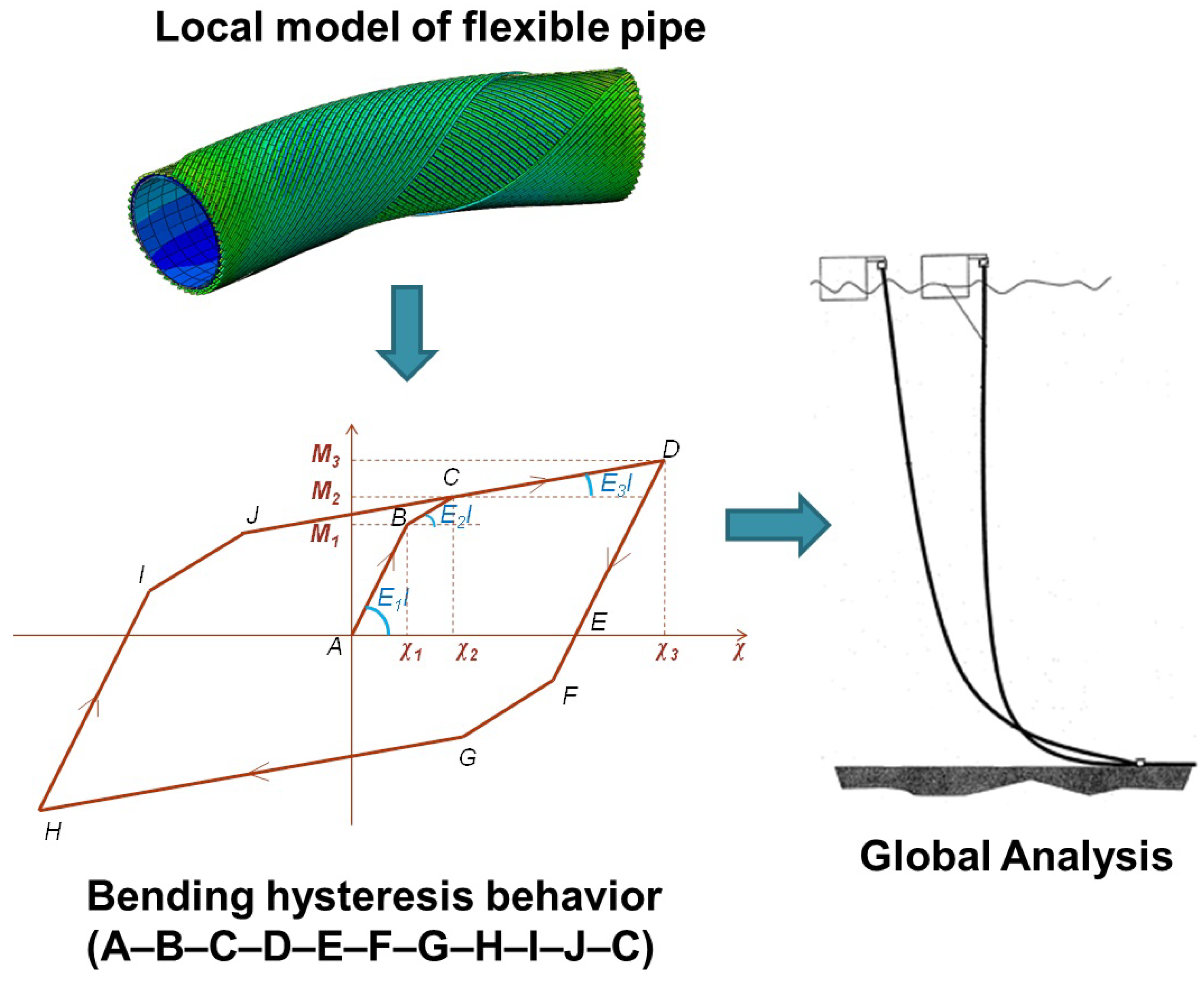
In a sequential multiscale approach, it is required that a suitable local time-invariant model is constructed and analysed to generate a set of responses under representative loading conditions. The responses obtained are then used to select and calibrate simpler representations for implementation in the global model, which can be modeled with homogenised representations, such as using idealized continuum models or structural elements, to estimate the global response. Subsequently, results obtained at selected points in the global analysis can be extracted and re-imposed on the local model as boundary conditions, enabling local stresses corresponding to the global motions to be determined. For a complex structure such as the multiple-layer flexible pipes considering layer interaction effects, a sequential approach is more practical for standard analyses. We demonstrate the sequential local-global approach for flexible pipes with local analyses of a length of flexible pipe using 3D FEA to determine the nonlinear responses under axial loading, torsion, bending moments and pressure (
Figure 5,
Figure 6 and
Figure 7), followed by the global analyses of full-length flexible pipes with hybrid beam elements employing all constitutive behaviors obtained for each loading cases. The first part of this procedure is shown schematically in
Figure 8: Simulations using the detailed finite element model are used to calibrate a constitutive model, which is then implemented in a large-scale simulation.
5.2. Nested Multiscale Modeling
For certain analyses in multiscale analysis, the sequential approach described above is inadequate, firstly because changes in the local state of the structure may affect the large-scale response and thus render the constitutive model calibration inaccurate, and secondly, because this influence on the large-scale response may in turn influence the state of the small-scale model. In flexible pipes, this includes the analysis of the consequences of wire breakage or loss of stability of the wires under pipe axial compression. These failure modes are discussed by Sousa et al. [
14], de Sousa et al. [
33] and Østergaard et al. [
16], respectively. The development of a nested approach is considered valuable for studying such progressive damage modes and the effects of local damage and manufacturing errors on such instabilities. To analyse these situations, the following nested multi-scale framework is proposed.
In the nested approach, local detailed simulations of critical regions of the riser provide feedback to the global model in every load increment. The global model consists mostly of hybrid beam elements as used in the sequential global-local approach (described in
Section 2), in which the axial, torsional and bending response is obtained from the constitutive model described in
Section 3. At critical regions such as hang-off, touchdown point or areas where high curvature ranges are expected, “user multiscale elements” are employed instead of hybrid beam elements. These elements are associated with separate three-dimensional FEA representations of this pipe. Following the standard homogenisation terminology, these secondary models are referred to as Representative Volume Elements (RVE), as both their structure and response are representative of the local behavior of the structure at any point. If multiple multiscale elements are used, a separate set of local solution and state variables is stored for each so that local and global representations are updated consistently. The RVEs take displacements and rotations of the nodes of the multiscale elements as inputs for local simulations and return forces, moments and element tangent stiffness to the nodes of the multiscale element based on the results of the local simulations. Use of an incremental loading scheme in the global model and retention of RVE variables minimises the computational expense of such a scheme. Global load increment size influences the accuracy of the global response as it governs the update frequency of the multiscale elements. For models implemented in the Abaqus environment, execution control can be handled conveniently by a Python script while local variable storage can be achieved using analysis restarts.
5.3. RVE Analysis
An RVE model for flexible pipe was created taking into account interaction between pipe layers, as described in
Section 4. For nested multiscale analysis, a truncated version of this model may be used, as suggested by Leroy and Estrier [
13].
Traditionally, in computational homogenisation approaches for composite materials, either prescribed displacement boundary conditions, prescribed traction boundary conditions or periodic boundary conditions are applied when carrying out RVE analyses (see, for example, Geers et al. [
25]). The most appropriate and convient choice for flexible pipes is periodic boundary conditions, due to the quasi-periodic nature of the structure. However, it is reconised that a primary determinant of flexible pipe global response and local stresses is the slip state of the helical armour wires, defined as the displacement of wire points relative to the deformation of the pipe structure (see, for example, Kebadze and Kraincanic [
10]). Consequently, when initiating an RVE analysis, we are interested in imposing an overall deformation state (a combination of axial strain, bending and torsion), while implementing the assumption that the slip state of the helical wires varies periodically along the pipe as the circumferential coordinate of each point changes. This represents the conditions present in the pipe far from constrictions and terminations, and avoids over-constraining the model.
Conventional discrete periodic boundary conditions impose a set of constraints on a structure that can be written as
where
denotes degrees of freedom, superscripts
L and
R indicate that the node belongs to the set of nodes on the left or right end of the structure, respectively, and
represents the deformation state to be imposed on the model. Equation (
26) must be enforced for every pair of discrete points in the model on the constrained surfaces.
We modify Equation (
26) such that the imposed equality refers to displacements that are relative and expressed in a local basis:
In Equation (
27),
is a basis transformation matrix
, superscripts 1 and 3 refer to constrained nodes as the left and right ends of the model, respectively, and superscripts 2 and 4 refer to displacements at the reference locations corresponding to the constrained nodes. This equation involves 4 points and must be repeated for every pair of discrete points in the model on the constrained surfaces. In finite element simulations, displacements
and
can be computed conviently by creating non-physical nodes that are forced by rigid body constraints to follow the pipe overall deformation,which is assumed to respond to the imposed axial strain, curvature and torsion as would an elastic cylinder. Imposition of pipe deformation and the periodic slip boundary conditions is achieved by chaining nodal degrees of freedom to a single control node. Following theoretical developments of computational homogenisation described by Edmans et al. [
22], the work done at this node is equivalent to the work of the corresponding multiscale element.
5.4. Execution Control
Run-time linking between the RVE and global analyses is controlled by using Python scripting which automatically initializes the different global/local analyses and post-processes results. The RVE analysis is initialized by a Python sub-process command once each global load step is completed, which then provides the nodal displacements and rotations of the multiscale elements (special beam elements). A tracking method is used to indicate whether each global and local analysis are finished.
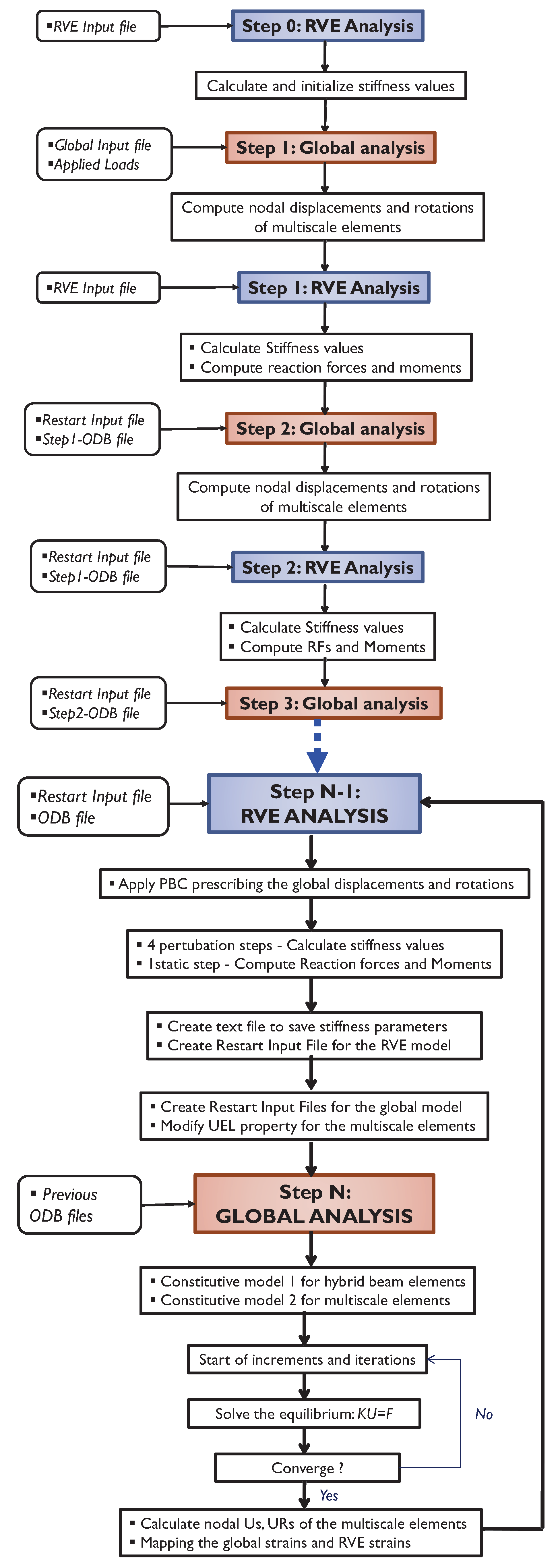
Each set of global displacements and rotations of the multiscale element’s nodes at every load increments is effectively transferred to the RVE model through Python scripting and application of periodic boundary conditions. On receiving the transferred deformation profiles, nonlinear analyses of the RVE are carried out to predict the 3D RVE deformation state corresponding to the current global step as well as to update the stiffness for the multiscale elements in the next load steps. Initial stiffnesses of the RVE are first calculated through a series of linear perturbation steps. The RVE perturbation analyses allow computation of the axial stiffness EA, bending stiffnesses EI1 and EI2, and torsional stiffness GJ at the current RVE deformed state without affecting the results of subsequent nonlinear analyses of the flexible pipe subject to the transferred global deformation. By this approach, we assume the stiffnesses of the RVE at the current state to be computed from the previous RVE deformation state. This is similar to the modified Newton iteration method whereby the stiffness matrices remains constant at the beginning the increment and only updated at the end of the increment. In addition, we develop a procedure to overwrite the stiffness of the global multiscale elements by those achieved from the RVE simulations. To handle various global and local analyses of the flexible pipe efficiently, we generate different restart analysis models for both the global and RVE models, storing all the previous deformed states and resume the analyses with new load information. Python scripting in association with shell batch scripts such as “Runjob.sh” and “Restart.sh” are implemented to run several simulation jobs at multiscale levels within a single execution command.
A flowchart for the complete nested multiscale framework is presented in
Figure 9.
5.5. Verification of the Nested Multiscale Approach
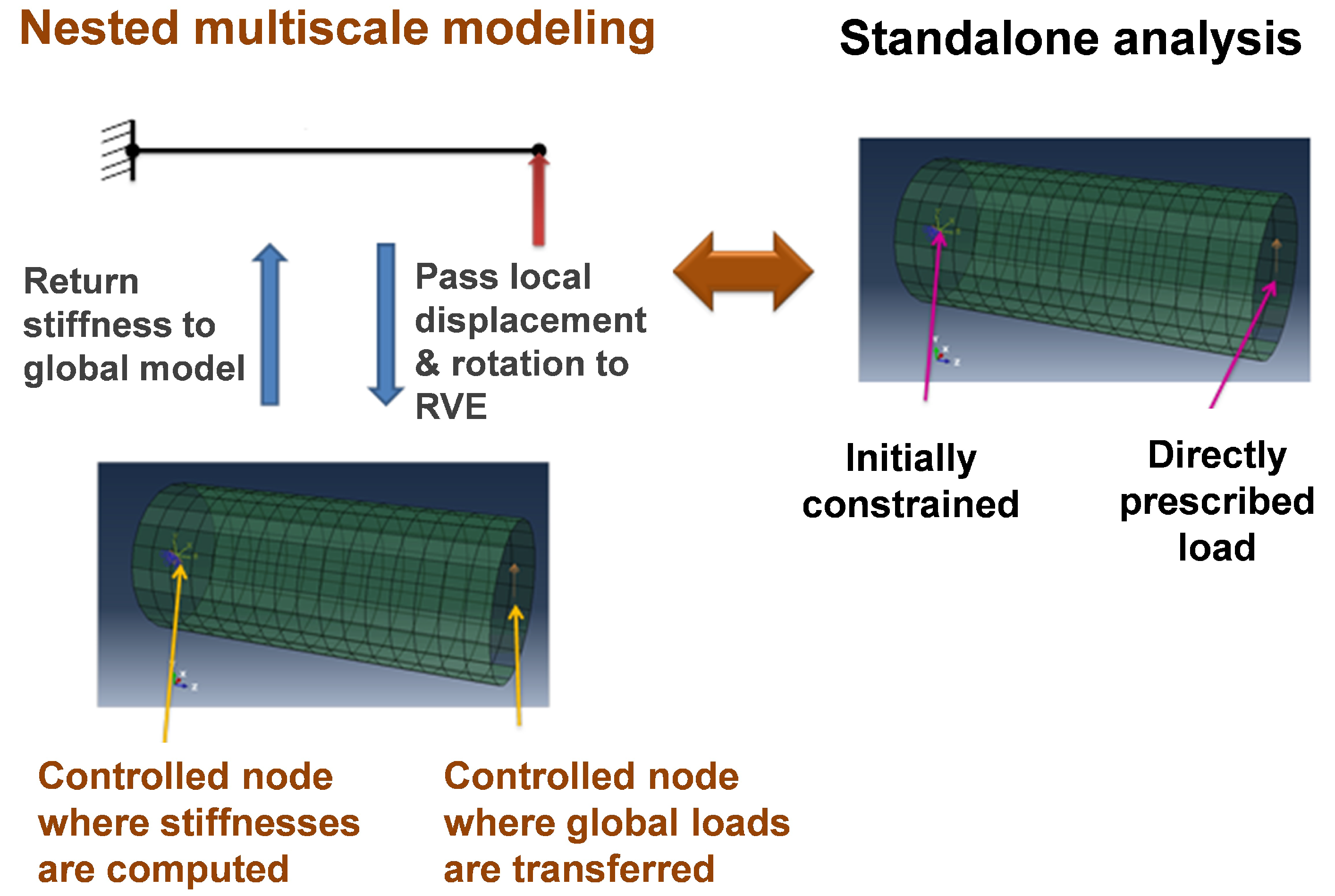
The application of the nested multiscale framework is demonstrated through simple examples of steel pipe models. The results of the integrated multiscale method are validated against the results of detailed and full-length analyses of pipes, referred to as “standalone analysis”, with identical material properties and loading conditions.
5.5.1. Example 1: Single Element
Using the nested multiscale approach, the global pipe model is defined with a single user-defined beam element (“multiscale element”) together with its associated RVE model. The pipe has an internal radius of 95.9 mm, an external radius of 116.2 mm and a length of 0.5 m. The RVE model associated with the multiscale element consists of 352 S4R shell elements. The internal and external radii and the pipe length of the RVE model are exactly the same as those of the single-beam global model. The validation is illustrated in
Figure 10. This example is designed to validate the accuracy of the information passing framework and stiffness update procedure. Though this example is much simpler than an analysis of realistic flexible pipe, it provides a basis for validation efforts of the nested multiscale framework.
Comparison is made between the standalone analysis and the multiscale analysis. An elasto-plastic material model with elastic modulus of 200 GPa, yield stress of 250 MPa and an isotropic hardening of 2 GPa is used for both the standalone model and the RVE model. A vertical displacement is applied at one end of the global beam model while the rotations are fixed, and the response of the beam model and its associated RVE model are analysed. At every load increment, the global model transfers the displacements and rotations to the controlled nodes of the associated RVE of the multiscale element and obtains new stiffness values of RVE in return. The responses predicted for the pipe by the nested multiscale method is shown in
Figure 11. It is seen that the results from the nested multiscale method are consistent with those predicted by the stand-alone analysis. The deformed shape of the pipe and the predicted Von Mises stress and plastic strains between the two models are identical.
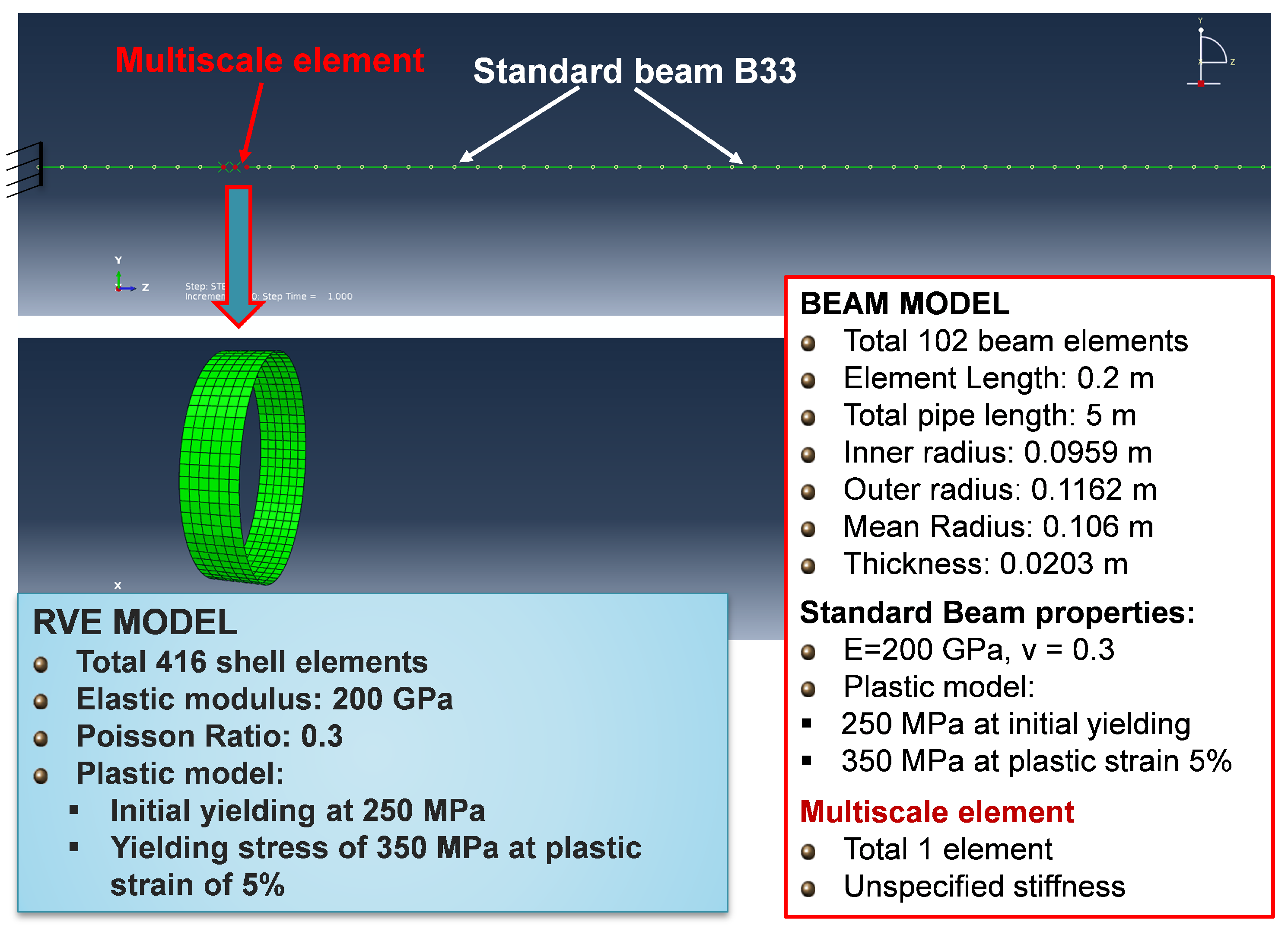
5.5.2. Example 2: Multiple Elements
The multiscale model in this example consists of multiple standard beam elements (Abaqus B33 elements) and one multiscale element in the center. The standard beam B33 elements use the elastic-plastic material model as described in Example 1 while the constitutive model of the multiscale elements are obtained from its associated RVE model. A description of the global and RVE models for the nested multiscale method is shown in
Figure 12. For comparison purposes, a standalone beam model, consisting solely of B33 elements is also analysed. The standalone model has the same pipe geometry and constitutive elastic-plastic behavior as the beam elements in the nested multiscale model. The left end of the beam is fixed while displacements in horizontal (
) and vertical (
) directions are applied to the right end of the beam
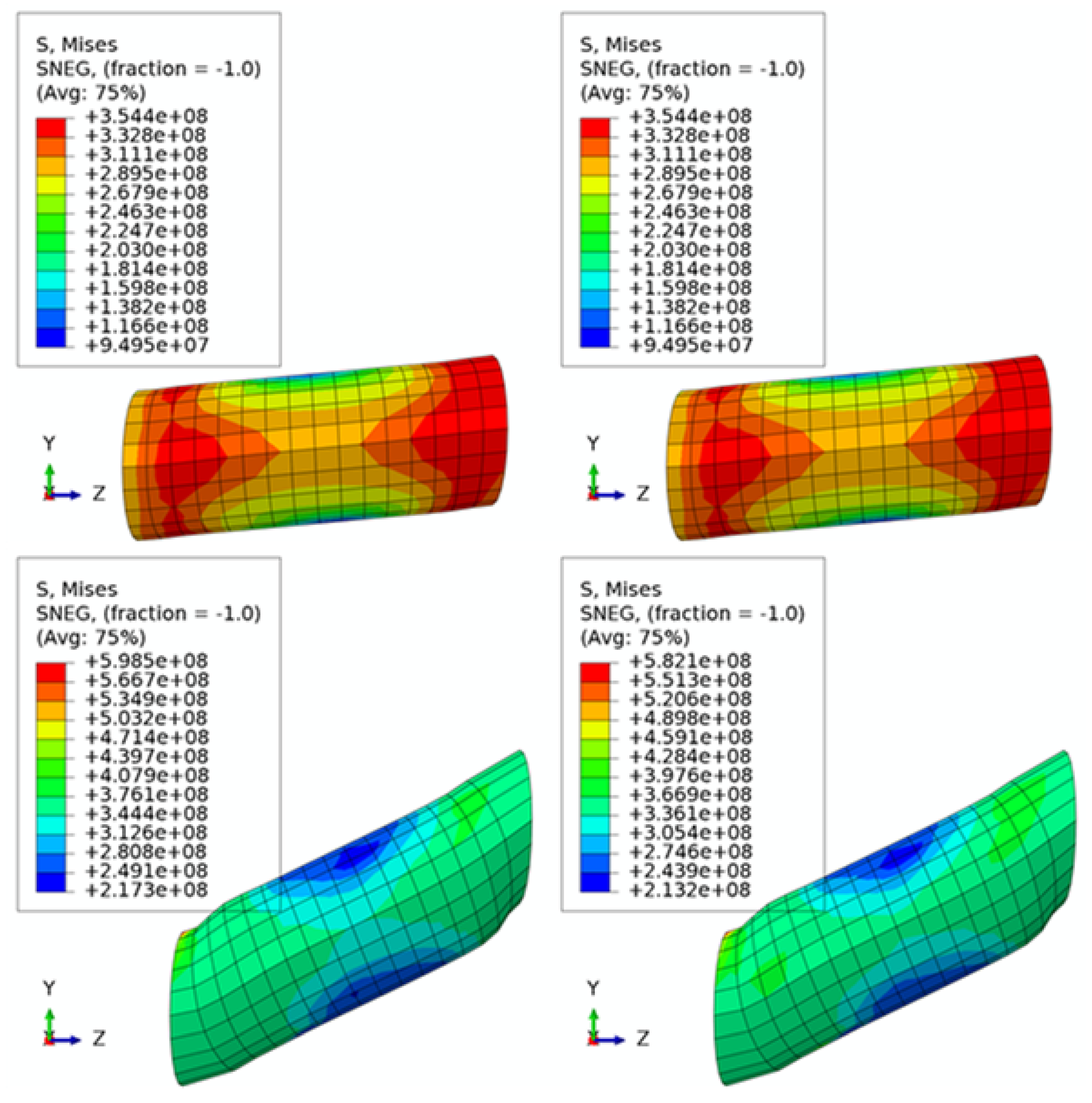
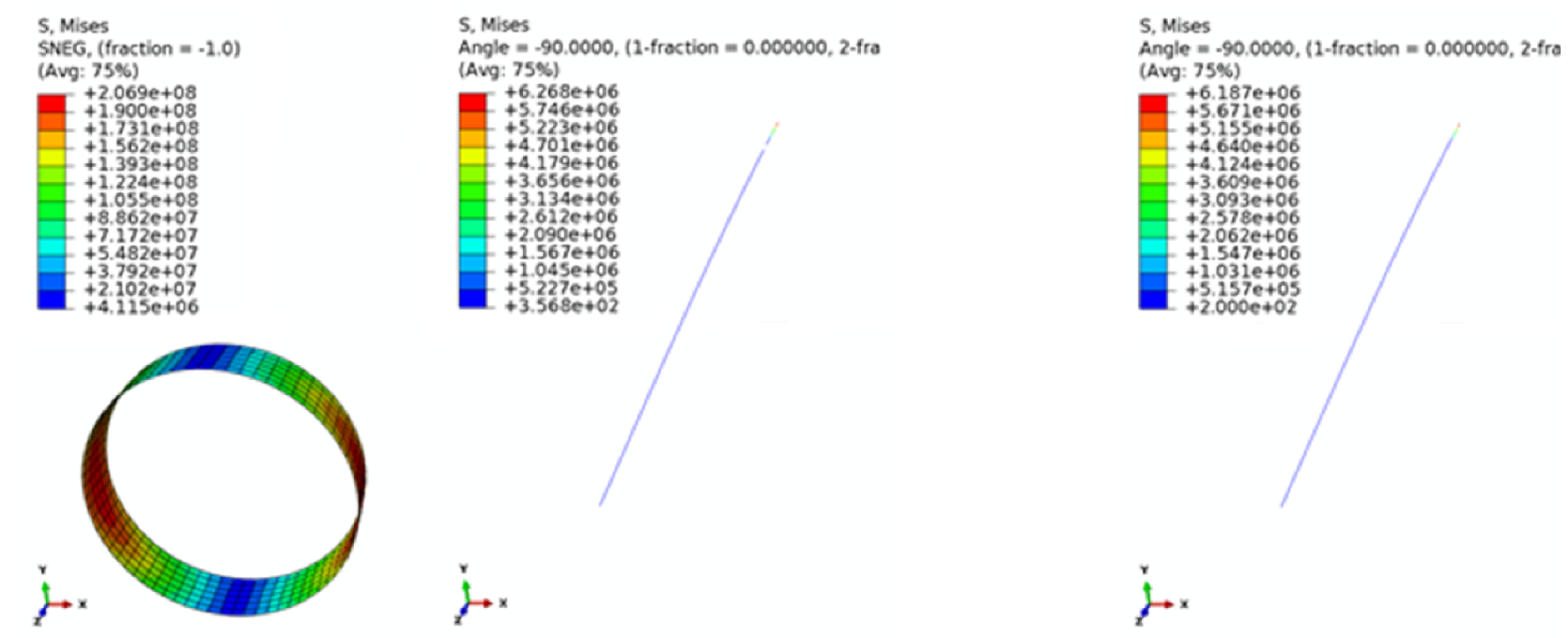
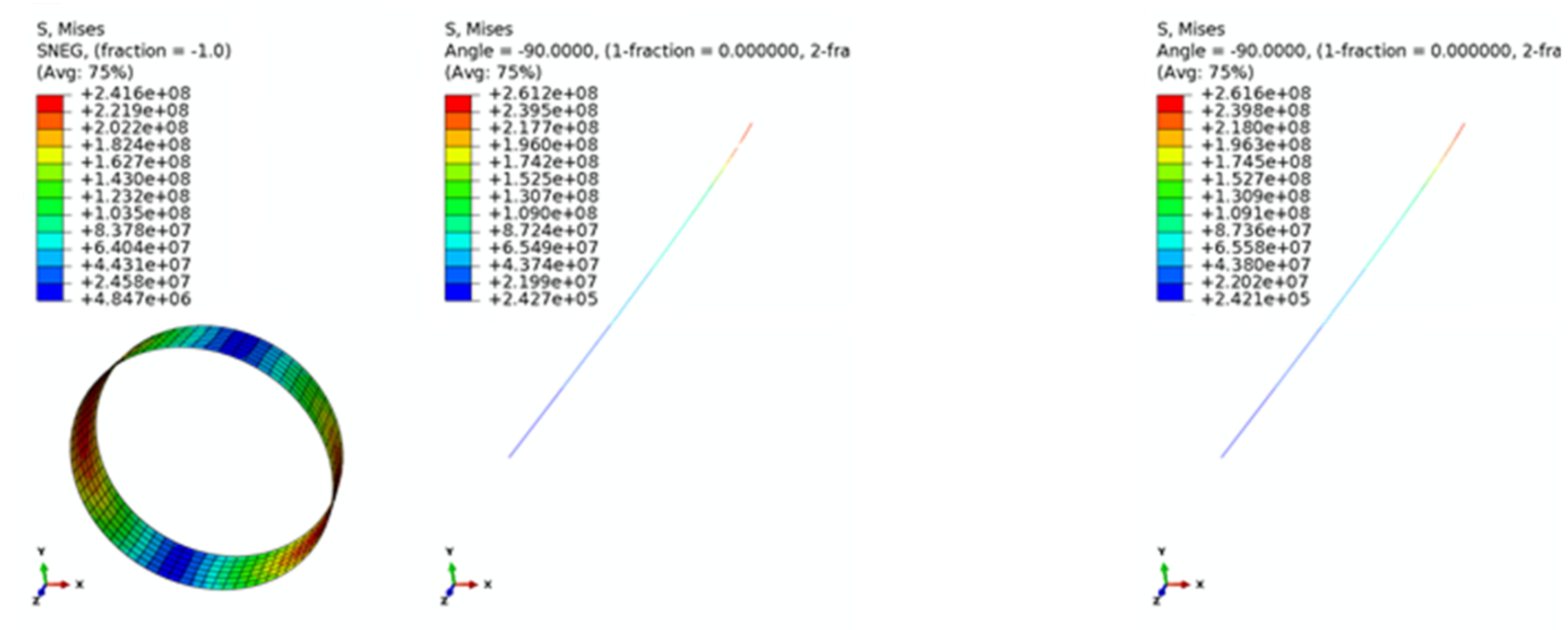
The results predicted by the standalone model and the integrated multiscale model are presented in
Figure 13 and
Figure 14. Comparison of plots in the center and right of each image shows good agreement between standalone and integrated approached. Similar values of maximum Von Mises stresses are obtained in the two models at different analysis steps, showing that the multiscale model is capable of providing consistent results with the standard beam model in Abaqus. It can also be observed that the nested multiscale method has an advantage over the standalone analysis in revealing more detailed stresses at the regions of interests through using multiscale elements, which becomes more relevant when increasingly complex structural models are investigated.
7. Conclusions
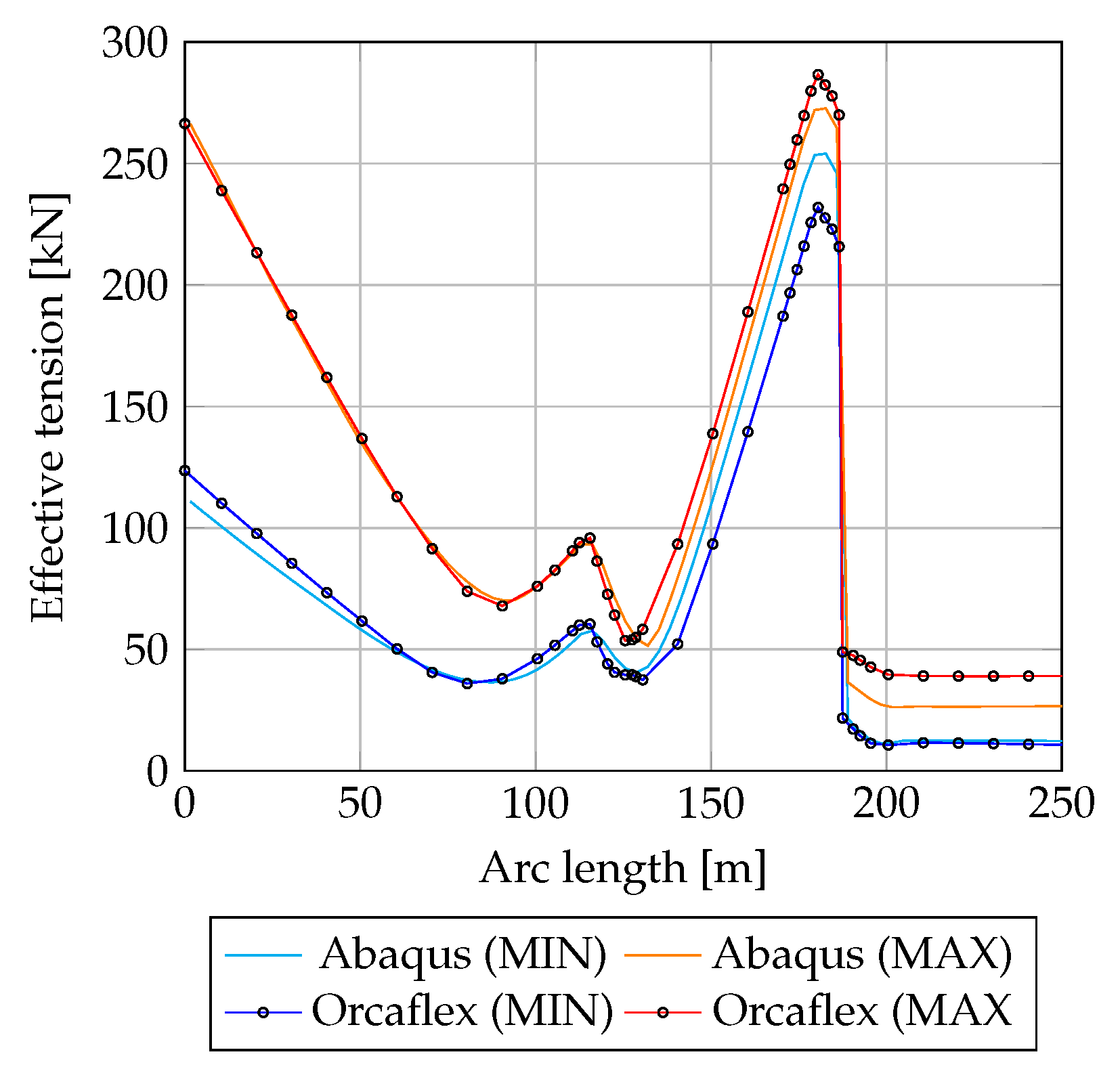
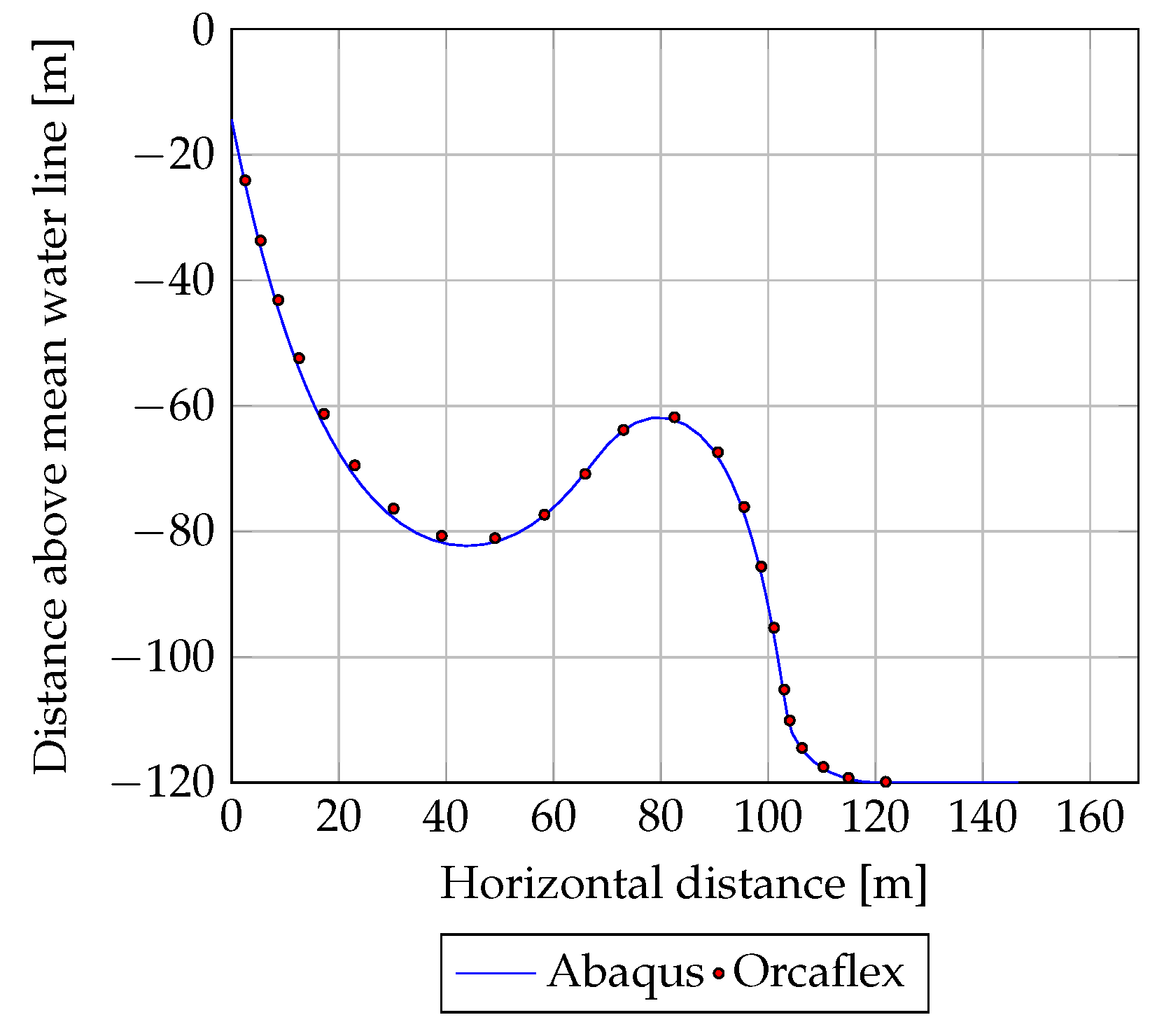
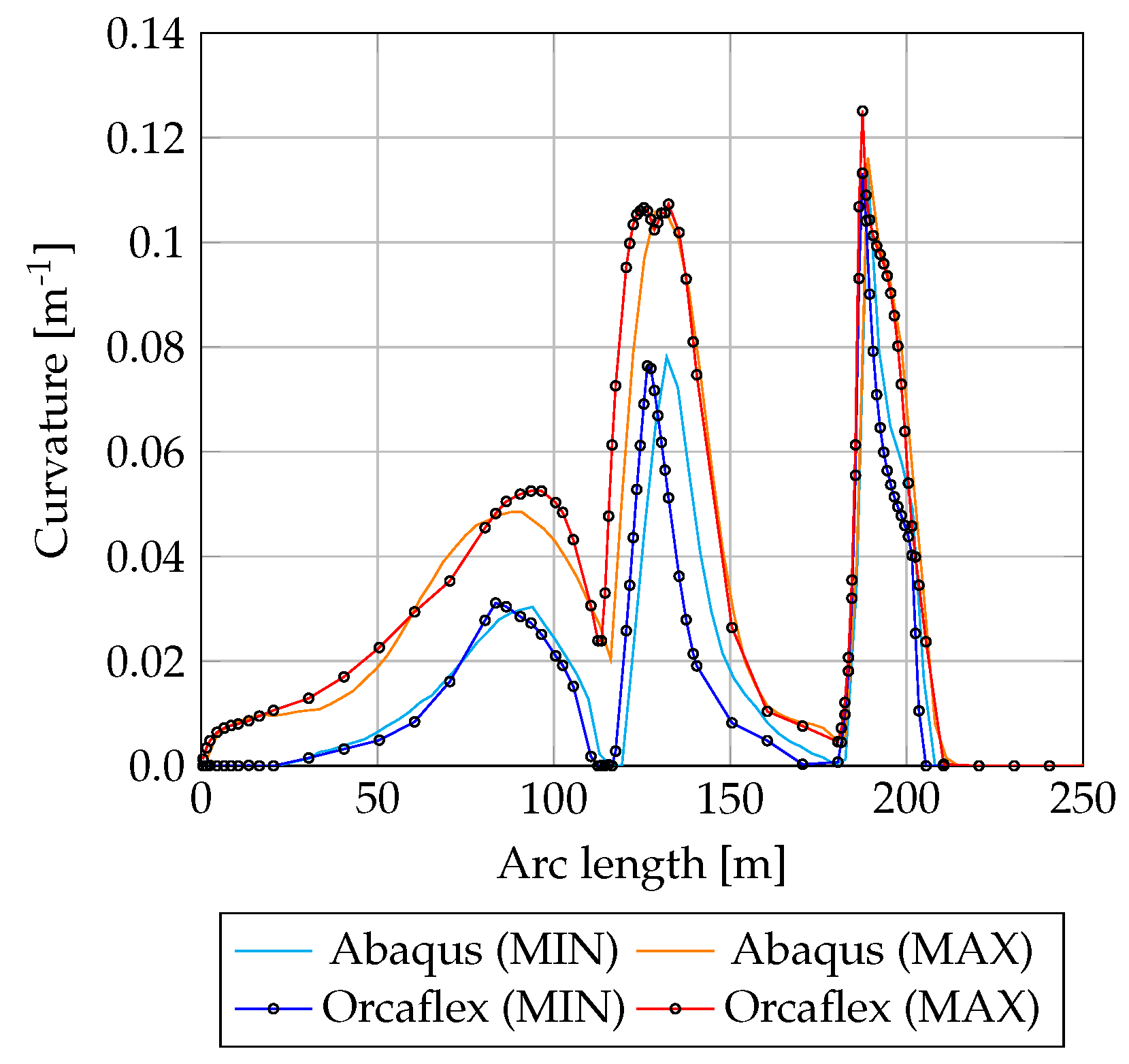
In this article, procedures and methodologies for carrying out multiscale analysis of flexible risers have been presented. A detailed finite element model for local analysis, a beam element for global analysis and a nonlinear constitutive model have been introduced as component models. Procedures for carrying out sequential and integrated multiscale analyses have been described. The sequential procedure is distinguished from a standard global-local analysis by the inclusion of more realistic nonlinear behaviour in the global analysis that is tailored to the specific pipe design and operating conditions and the use of more accurate boundary conditions in the local analysis. The integrated procedure allows an evolving local configuration in selected elements to update the global analysis model in a staggered solution process. Applications of these multiscale procedures include fatigue assessment and, for the integrated model, investigation of progressive damage modes such as lateral buckling of tensile wires. Future validation work planned for this model include comparison of the global response obtained with the beam element/calibrated constitutive model against commercial dynamic analysis codes, as well as comparison of stresses obtained in the detailed FE model with other leading local analysis methods.
The adequacy of the lumped-mass and -stiffness approach used in Orcaflex for standalone dynamic analysis has been shown [
35]. However, the authors contend that beam elements are more suitable for use in a multiscale framework. Beam elements allow the implementation of the wide variety of beam theories developed in structural mechanics and are formulated with reference to meaningful and measurable intermediate scale quantities (section force resultants and deformation measures). Consequently, we believe there is more scope for achieving a predictive and physically meaningful link between global dynamics and local stresses by using beam elements in global models. A survey of the performance of beam element formulations and/or beam theories for this application is outwith the scope of the current study. The current study demonstrated that a hybrid formulation with inextensibility constraint (Equation (
11)) is an effective means of implementing beam theories in structures with high axial and low flexural stiffness. Further development of this approach could include implementation of more complex beam theories, in conjunction with determination of other section deformation measures (such as section rotation and warping).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}