
Reduced Order Data-Driven Analysis of Cavitating Flow over Hydrofoil with Machine Learning
 , ,
, ,
Abstract
:1. Introduction
2. Hydrofoil Cavitation Problem
3. Simulation Data Preparation
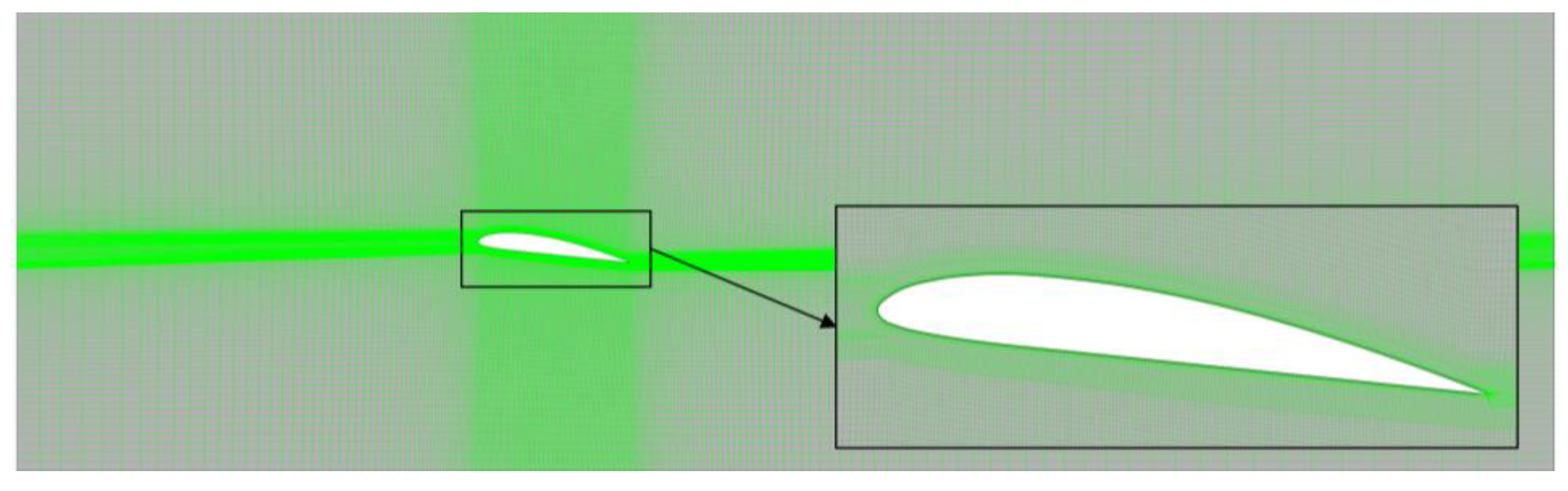
3.1. Clark-Y Hydrofoil Model and Flow Field Discretization
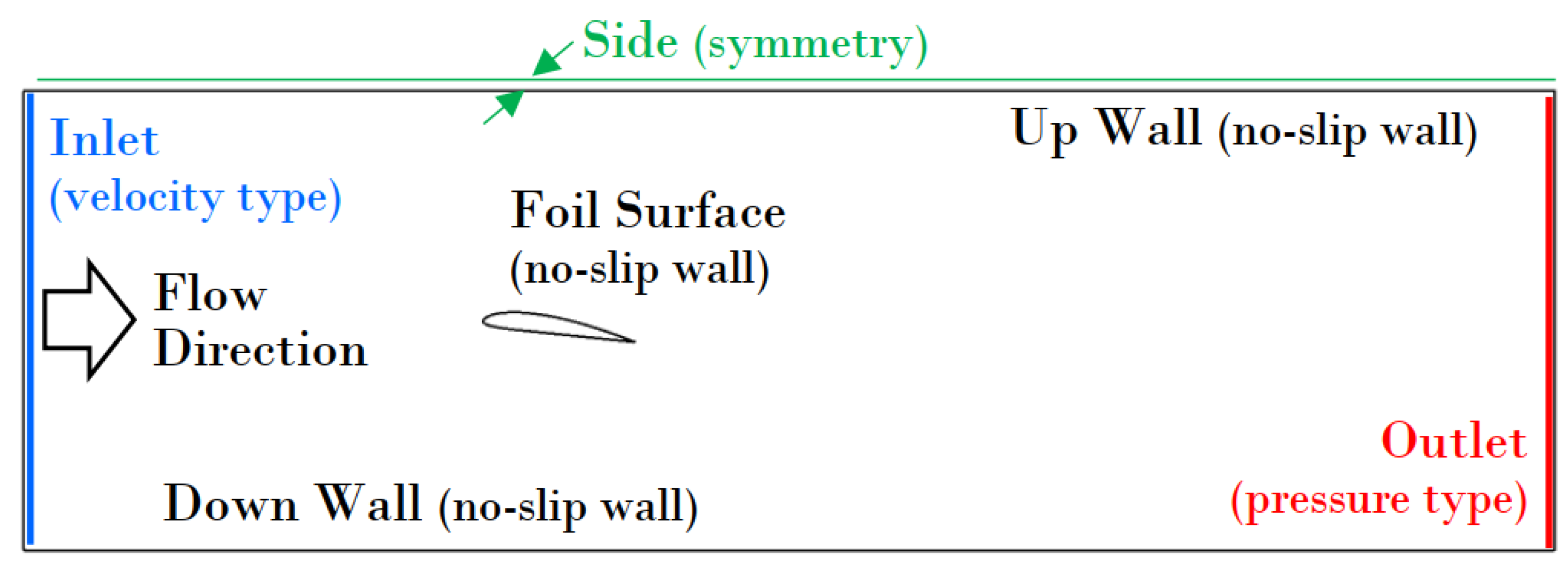
3.2. Setup of Computational Fluid Dynamics
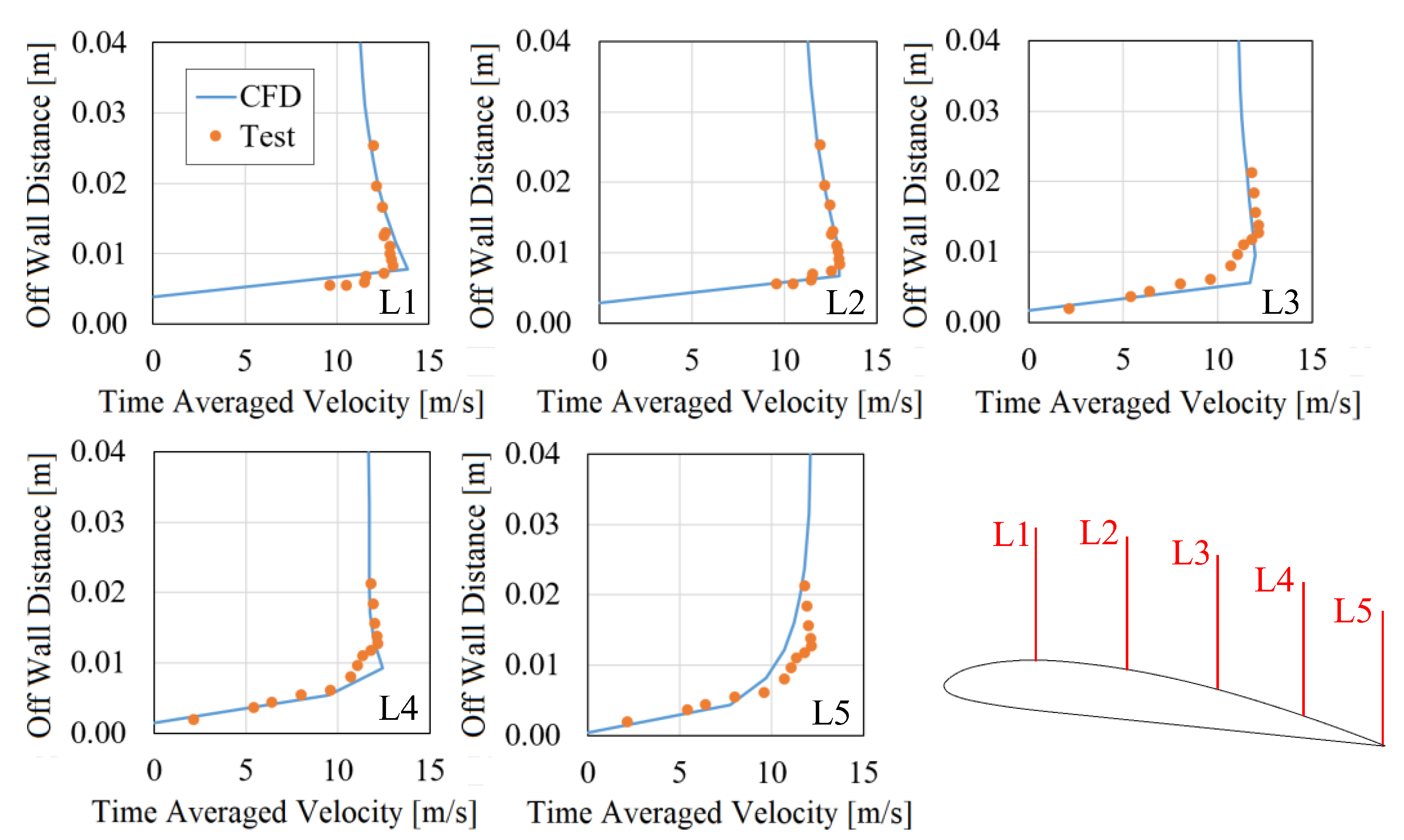
3.3. Verification and Validation of Simulation Data
4. Order Reduction in Cavitating Flow Data
4.1. Proper Orthogonal Decomposition
4.2. Flow Pattern by Order
4.3. Energy Law of Modes
5. Learning and Prediction
5.1. Workflow
5.2. Comparison by Order
5.3. Discussion
6. Conclusions
- (a)
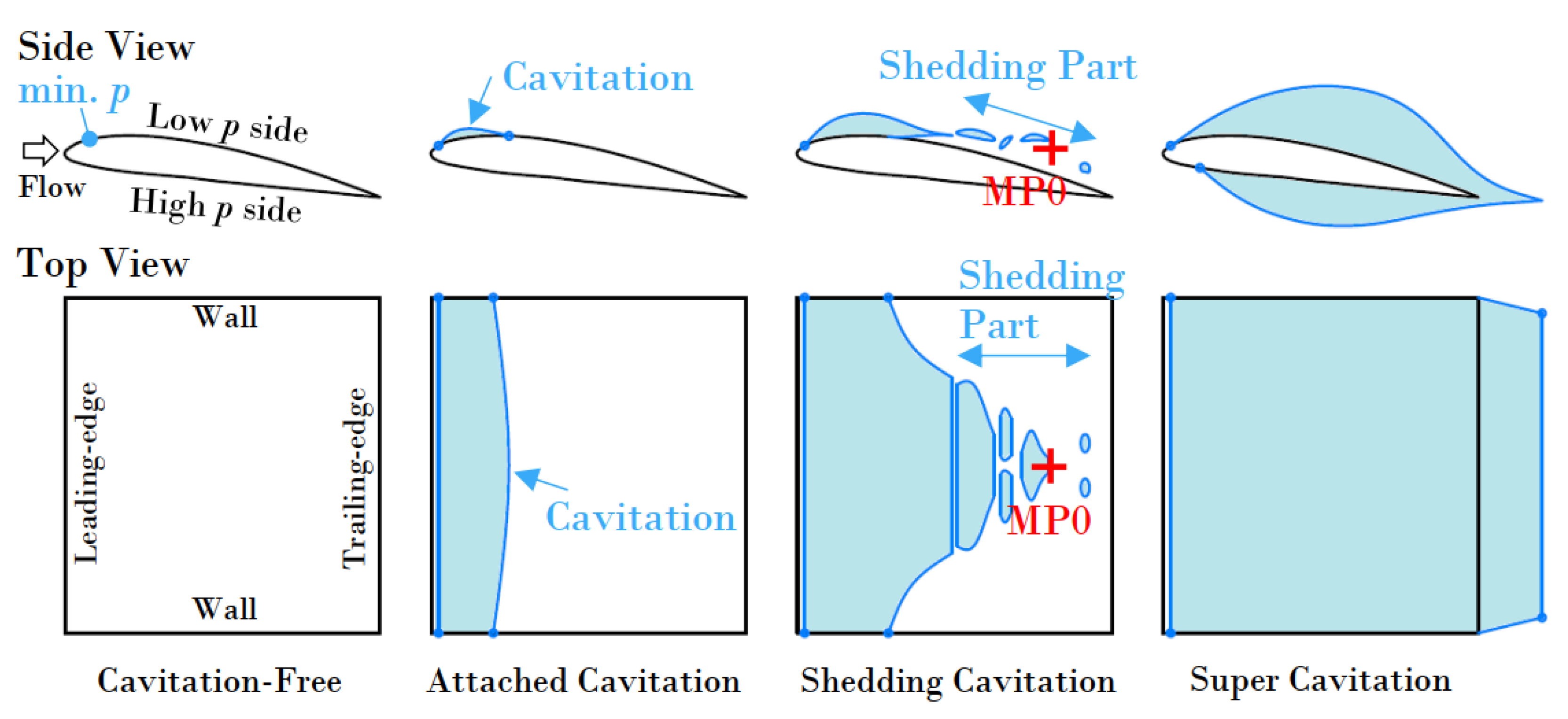
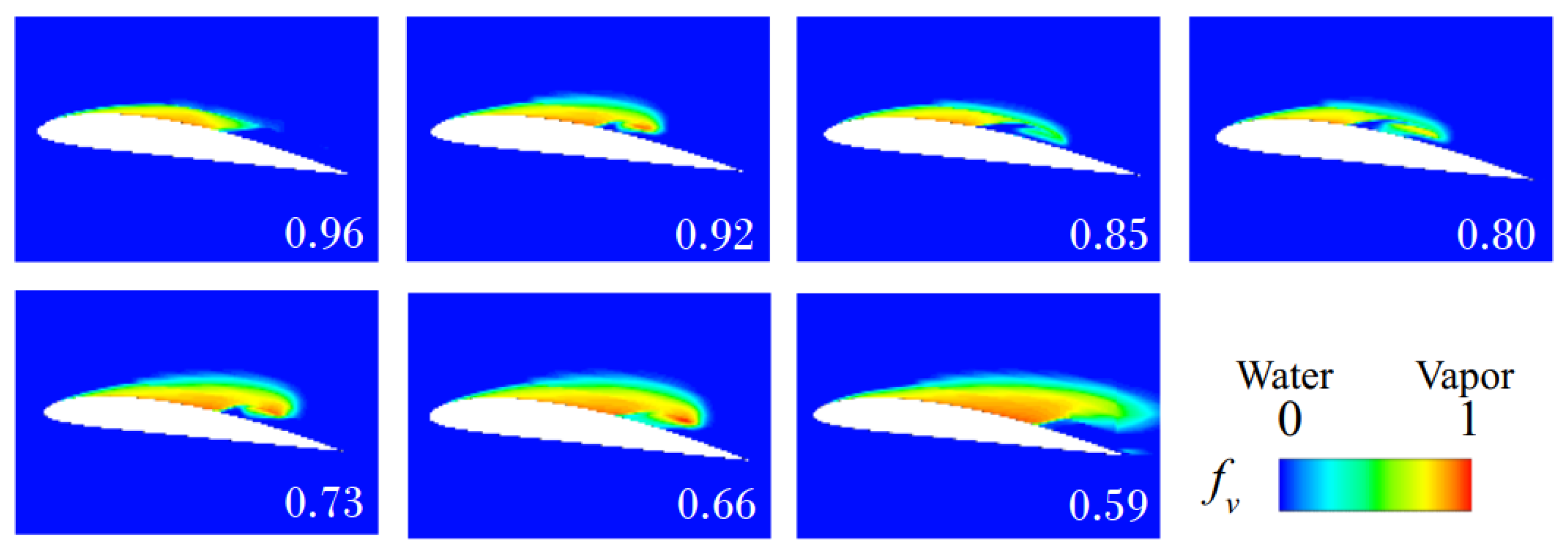
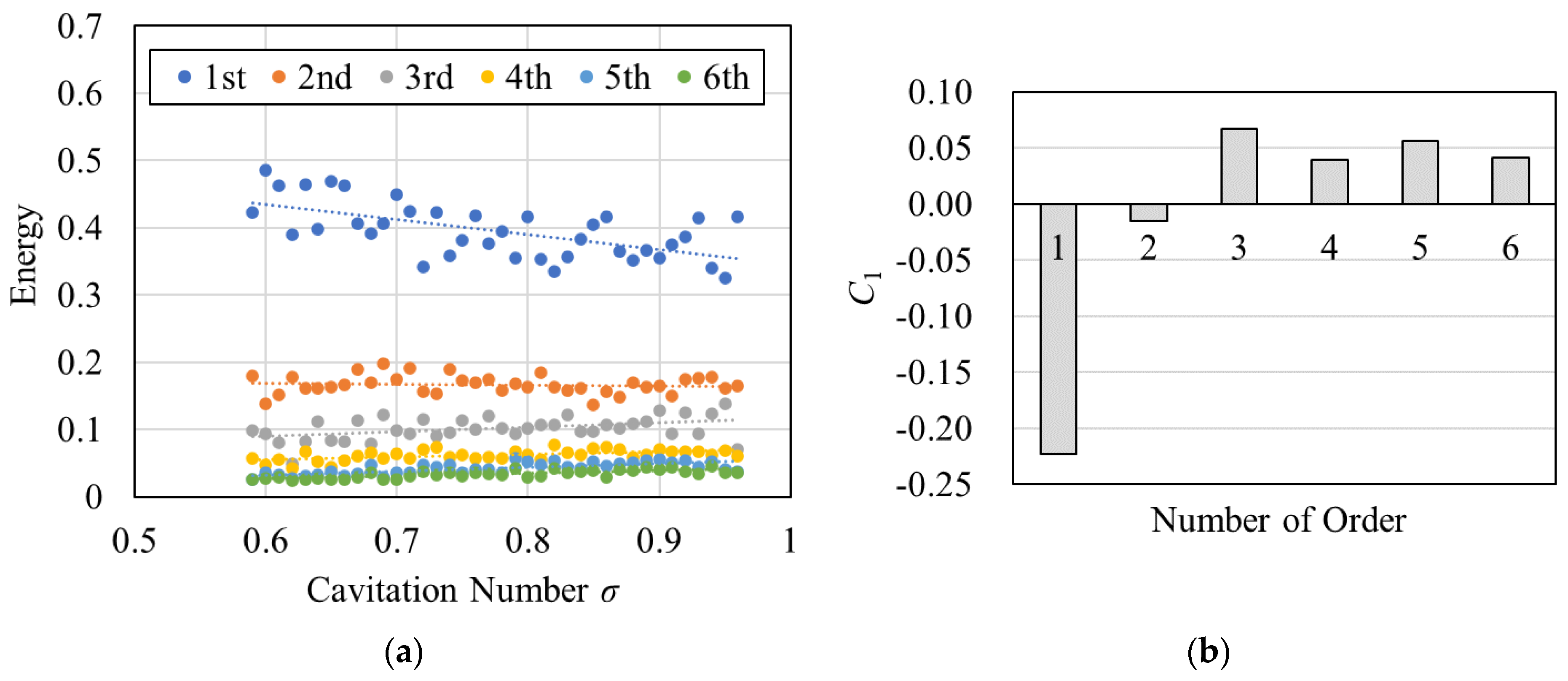
- CFD simulation proved effective in predicting the flow field around the hydrofoil. After comparison with the tested data, the capture of velocity fields at different positions was found to be more accurate. The analysis of cavitation two-phase flow using CFD revealed that the size of the cavity varied with the cavitation number σ. As σ decreased from 0.96 to 0.59, the relative length of the cavity increased from 70% of the hydrofoil length to approximately 100%. Additionally, the attached cavity gradually exhibited a downstream shedding phenomenon, forming a shedding cavitation situation.
- (b)
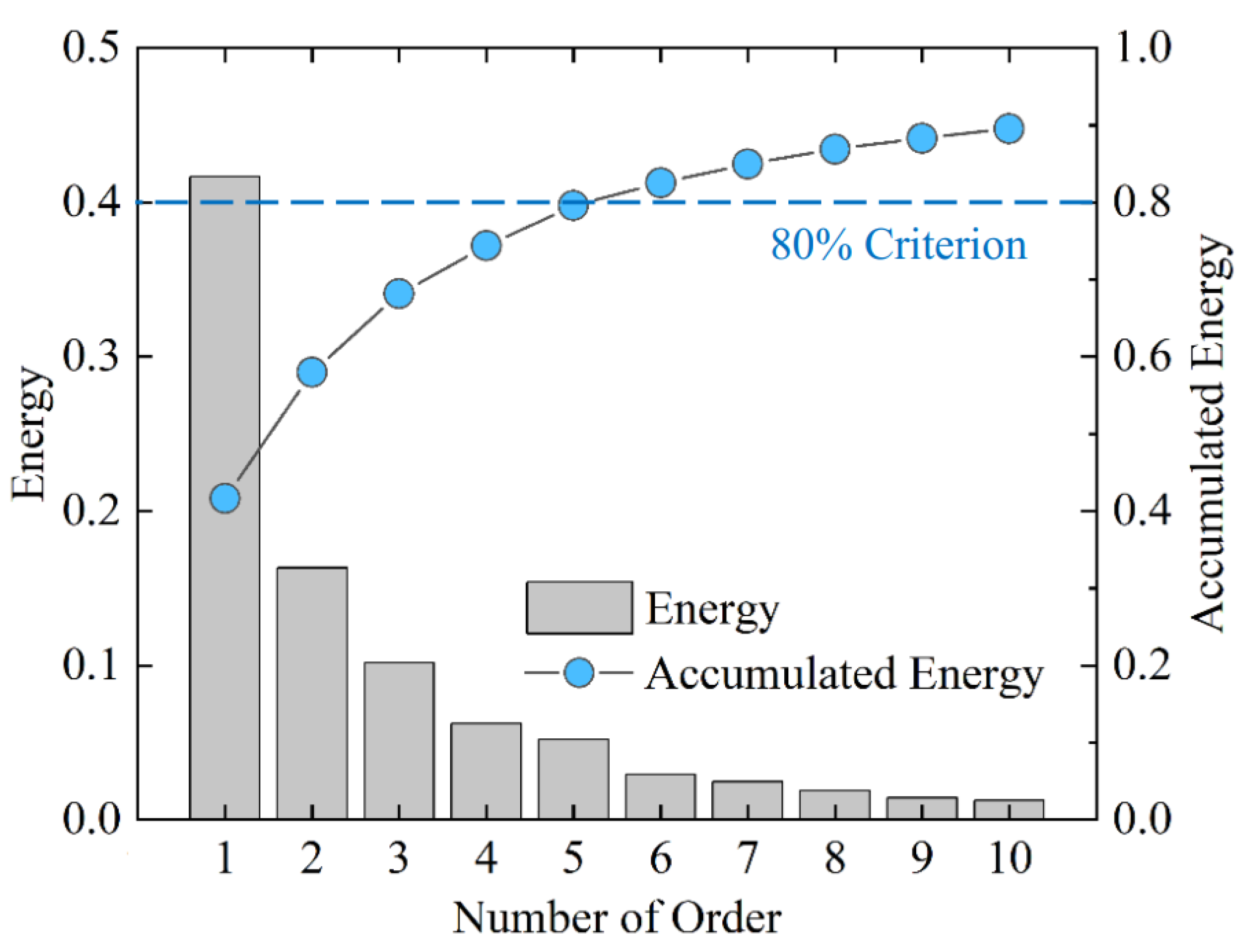
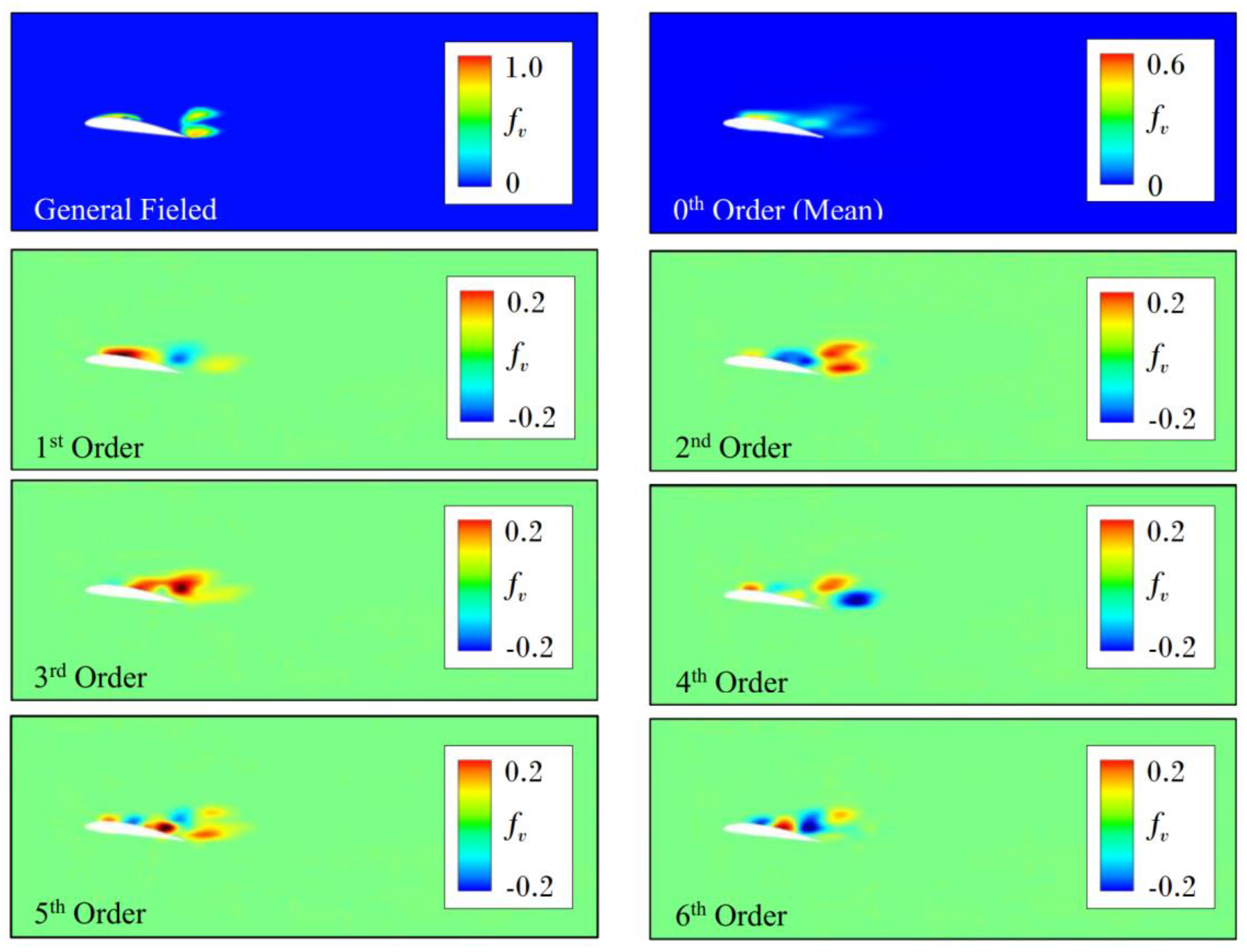
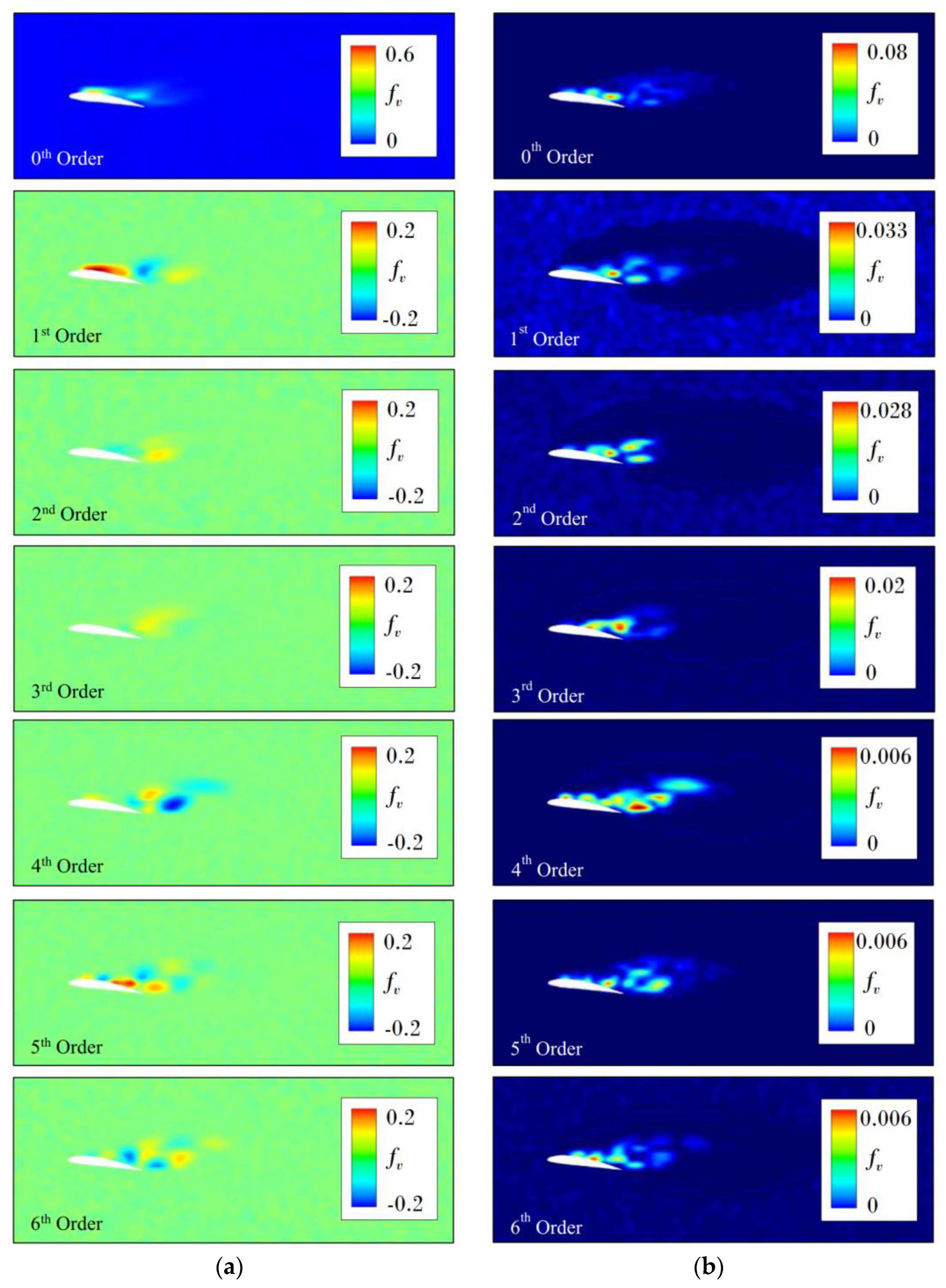
- The use of POD enabled effective mode decomposition of the cavitation volume fraction field. Except for the zeroth-order (mean) field, the remaining modes were sorted based on their energy intensity. For instance, taking σ = 0.8 as an example, the 1st order mode energy accounted for over 40%, and the sum of the energies for the first six modes exceeded 80%. The analysis of the corresponding flow phenomenon indicated that the 0th and 1st modes are related to the attachment of a stable cavity, while the 2nd, 3rd, and 4th modes are related to the shedding of cavitation. The 5th and 6th modes along the hydrofoil surface may also be related to the backward jet flow.
- (c)
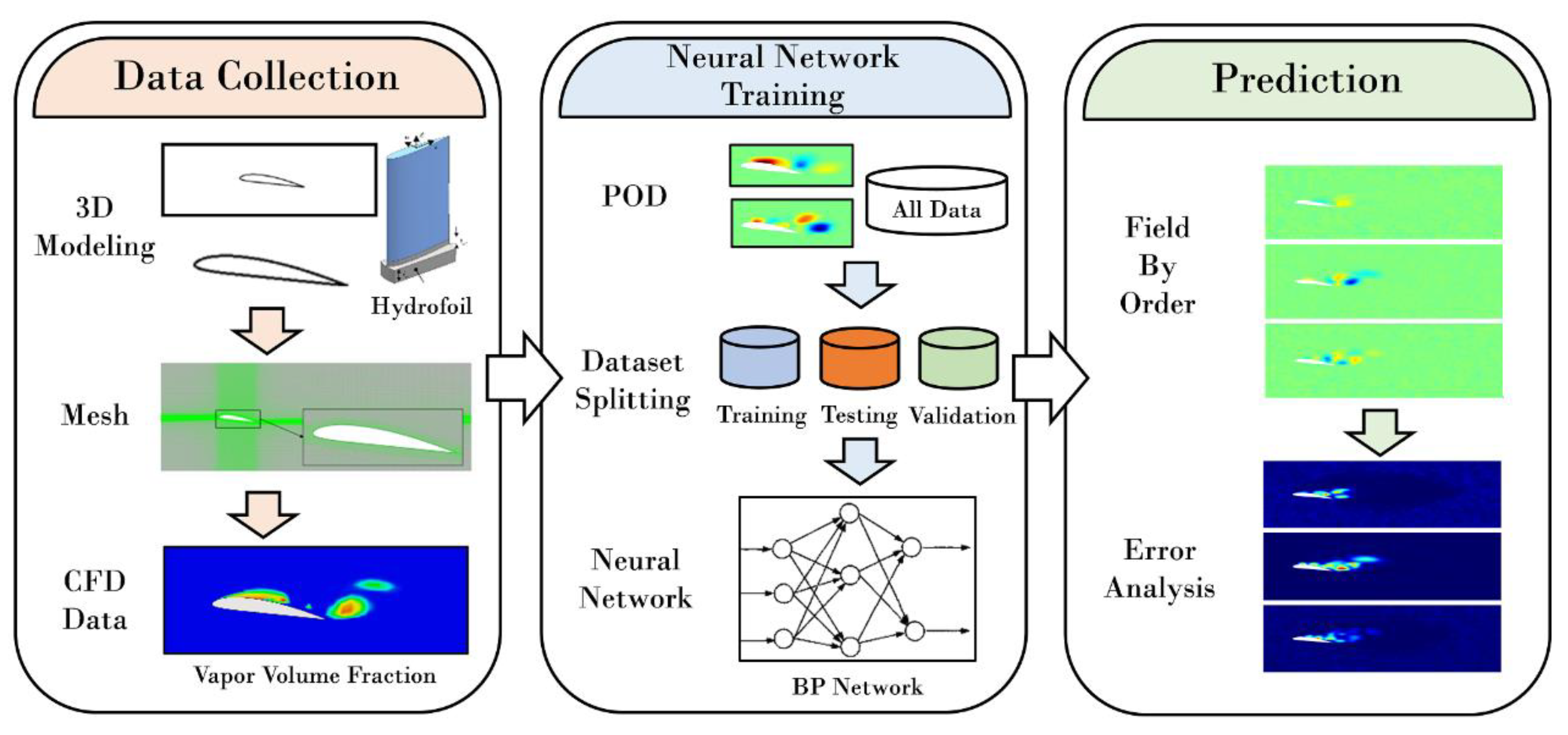
- The BP neural network was trained using modal data of CFD-POD under different cavitation numbers. Using the cavitation number σ as input and a vapor volume of 6000 points as output, the cavitation distribution pattern at a certain cavitation number can be predicted. For instance, taking σ = 0.8 as an example, the prediction results of the zeroth- and first-order modes were accurate with minimal errors. However, the prediction of intensity for the third- and fourth-order modes was not as precise, as their contours appeared similar. The prediction effect of the 5th mode was accurate, while the 6th mode showed a slightly worse pattern. For stable cavitation, the neural network performed excellently, but for shedding cavitation, the accuracy of the neural network surrogate model needs further improvement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brennen, C.E. Fundamentals of Multiphase Flow; Cambridge University Press: Cambridge, UK, 2005; Available online: https://www.cambridge.org/core/books/fundamentals-of-multiphase-flow/FC7E6D7E54AC9D1C178EDF88D6A75FFF (accessed on 9 January 2024).
- Arndt, R.E.A. Cavitation in vortical flows. Annu. Rev. Fluid Mech. 2002, 34, 143–175. [Google Scholar] [CrossRef]
- Gogate, P.R.; Kabadi, A.M. A review of applications of cavitation in biochemical engineering/biotechnology. Biochem. Eng. J. 2009, 44, 60–72. [Google Scholar] [CrossRef]
- Prosperetti, A. Vapor Bubbles. Annu. Rev. Fluid Mech. 2017, 49, 221–248. [Google Scholar] [CrossRef]
- Luo, X.W.; Ji, B.; Tsujimoto, Y. A review of cavitation in hydraulic machinery. J. Hydrodyn. 2016, 28, 35–358. [Google Scholar] [CrossRef]
- Ashokkumar, M. The characterization of acoustic cavitation bubbles—An overview. Ultrason. Sonochem. 2011, 18, 864–872. [Google Scholar] [CrossRef] [PubMed]
- Petkovsek, R.; Gregorcic, P. A laser probe measurement of cavitation bubble dynamics improved by shock wave detection and compared to shadow photography. J. Appl. Phys. 2007, 102, 391. [Google Scholar] [CrossRef]
- Chen, H.S.; Jiang, L.; Chen, D.R.; Wang, J.D. Damages on steel surface at the incubation stage of the vibration cavitation erosion in water. Wear 2008, 265, 692–698. [Google Scholar]
- Zhang, X.B.; Qiu, L.M.; Qi, H.; Zhang, X.J.; Gan, Z.H. Modeling liquid hydrogen cavitating flow with the full cavitation model. Int. J. Hydrogen Energy 2008, 33, 7197–7206. [Google Scholar] [CrossRef]
- Zhao, W.G.; Zhang, L.X.; Xin, X.P.; Shao, X.M.; Li, W. Numerical simulation of cavitation flow on horizontal axis marine current turbine. J. Mech. Eng. 2011, 47, 171. [Google Scholar] [CrossRef]
- Arndt, R.E.A. Cavitation in fluid machinery and hydraulic structures. Annu. Rev. Fluid Mech. 2003, 13, 273–326. [Google Scholar] [CrossRef]
- Yonezawa, K.; Konishi, D.; Miyagawa, K. Cavitation surge in a small model test facility simulating a hydraulic power plant. Int. J. Fluid Mach. Syst. 2012, 5, 152–160. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, H.G.; Kim, J.H.; Lee, K.J.; Seo, J.S. Reduction of propeller cavitation induced hull exciting pressure by a reflected wave from air-bubble layer. Ocean Eng. 2014, 77, 23–32. [Google Scholar] [CrossRef]
- Dular, M.; Bachert, B.; Stoffel, B.; Sirok, B. Relationship between cavitation structures and cavitation damage. Wear 2004, 257, 1176–1184. [Google Scholar] [CrossRef]
- Tao, R.; Zhou, X.Z.; Xu, B.C.; Wang, Z.W. Numerical investigation of the flow regime and cavitation in the vanes of reversible pump-turbine during pump mode’s starting up. Renew. Energy 2019, 141, 9–19. [Google Scholar] [CrossRef]
- Arabnejad, M.H.; Amini, A.; Farhat, M.; Bensow, R.E. Hydrodynamic mechanisms of aggressive collapse events in leading edge cavitation. J. Hydrodyn. 2020, 32, 6–19. [Google Scholar] [CrossRef]
- Escaler, X.; Farhat, M.; Avellan, F.; Egusquiza, E. Cavitation erosion tests on a 2D hydrofoil using surface-mounted obstacles. Wear 2003, 254, 441–449. [Google Scholar] [CrossRef]
- Paik, B.G.; Jin, K.; Park, Y.H.; Kim, K.S.; Yu, K.K. Analysis of wake behind a rotating propeller using PIV technique in a cavitation tunnel. Ocean Eng. 2007, 34, 594–604. [Google Scholar] [CrossRef]
- Gopalan, S.; Katz, J. Flow structure and modeling issues in the closure region of attached cavitation. Phys. Fluids 2000, 12, 895–911. [Google Scholar] [CrossRef]
- Barre, S.; Rolland, J.; Boitel, G.; Goncalves, E. Experiments and modeling of cavitating flows in Venturi: Attached sheet cavitation. Eur. J. Mech. B/Fluids 2009, 28, 444–464. [Google Scholar] [CrossRef]
- Shi, S.; Wang, G.; Wang, F.; Gao, D. Experimental study on unsteady cavitation flows around three-dimensional hydrofoil. Chin. J. Appl. Mech. 2011, 28, 105–110. [Google Scholar]
- Melissaris, T.; Bulten, N.; Terwisga, T.J.C. On the applicability of cavitation erosion risk models with a URANS solver. J. Fluids Eng. 2019, 141, 1011104. [Google Scholar] [CrossRef]
- Luo, H.; Tao, R. Prediction of the cavitation over a twisted hydrofoil considering the nuclei fraction sensitivity at 4000m altitude level. Water 2021, 13, 1938. [Google Scholar] [CrossRef]
- Ravelet, F.; Danlos, A.; Bakir, F.; Croci, K.; Khelladi, S. Development of attached cavitation at very low Reynolds numbers from partial to super-cavitation. Appl. Sci. 2020, 10, 7350. [Google Scholar] [CrossRef]
- Dreyer, M.; Decaix, J.; Münch-Alligné, C.; Farhat, M. Mind the gap: A new insight into the tip leakage vortex using stereo-PIV. Exp. Fluids 2014, 55, 1849. [Google Scholar] [CrossRef]
- Hu, Z.L.; Wu, Y.Z.; Li, P.X.; Xiao, R.F.; Tao, R. Comparative study on the fractal and fractal dimension of the vortex structure of hydrofoil’s tip leakage flow. Fractal Fract. 2023, 7, 123. [Google Scholar] [CrossRef]
- Liu, J.B.; Bao, Y.; Zheng, W.T. Analyses of some structural properties on a class of hierarchical scale-free networks. Fractals 2022, 30, 2250136. [Google Scholar] [CrossRef]
- Liu, J.B.; Bao, Y.; Zheng, W.T.; Hayat, S. Network coherence analysis on a family of nested weighted n-polygon networks. Fractals 2022, 29, 2150260. [Google Scholar] [CrossRef]
- Franc, J.P.; Miche, J.M. Fundamentals of Cavitation; Kluwer Academic Publishers: Amsterdam, The Netherlands, 2004; Available online: https://link.springer.com/book/10.1007/1-4020-2233-6 (accessed on 9 January 2024).
- Tao, T. A quantitative formulation of the global regularity problem for the periodic Navier-Stokes equation. Dyn. Partial Differ. Equ. 2007, 4, 293–302. [Google Scholar] [CrossRef]
- Březina, J. Asymptotic behavior of solutions to the compressible Navier-Stokes equation around a time-periodic parallel flow. SIAM J. Math. Anal. 2013, 45, 3514–3574. [Google Scholar] [CrossRef]
- Pitsch, H. Large-Eddy simulation of turbulent combustion. Annu. Rev. Fluid Mech. 2006, 38, 453–482. [Google Scholar] [CrossRef]
- Spalart, P.R. Detached-Eddy Simulation. Annu. Rev. Fluid Mech. 2009, 41, 181–202. [Google Scholar] [CrossRef]
- Zhong, X.; Wang, X. Direct numerical simulation on the receptivity, Instability, and transition of hypersonic boundary layers. Annu. Rev. Fluid Mech. 2012, 44, 527–561. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Vinuesa, R.; Steven, L.B. Enhancing computational fuid dynamics with machine learning. Nat. Comput. Sci. 2022, 2, 358–366. [Google Scholar] [CrossRef] [PubMed]
- Díez, P.; Muíxí, A.; Zlotnik, S. Nonlinear dimensionality reduction for parametric problems: A kernel Proper Orthogonal Decomposition (kPOD). Int. J. Numer. Methods Eng. 2021, 122, 7306–7327. [Google Scholar] [CrossRef]
- Kaheman, K.; Brunto, S.L.; Kutz, J.N. Automatic differentiation to simultaneously identify nonlinear dynamics and extract noise probability distributions from data. Mach. Learn. Sci. Technol. 2022, 3, 015031. [Google Scholar] [CrossRef]
- Brunton, S.; Noack, B.R.; Koumoutsakos, P. Machine learning for fluid mechanics. Annu. Rev. Fluid Mech. 2020, 52, 477–508. [Google Scholar] [CrossRef]
- Kou, J.; Zhang, W. An approach to enhance the generalization capability of nonlinear aerodynamic reduced-order models. Aerosp. Sci. Technol. 2016, 49, 197–208. [Google Scholar] [CrossRef]
- Jin, F.Y.; Tao, R.; Lu, Z.H.; Xiao, R.F. A spatially distributed network for tracking the pulsation signal of flow field based on CFD simulation: Method and a case study. Fractal Fract. 2021, 5, 181. [Google Scholar] [CrossRef]
- Charkrit, S.; Shrestha, P.; Liu, C.Q. Liutex core line and POD analysis on hairpin vortex formation in natural flow transition. J. Hydrodyn. 2020, 32, 1109–1121. [Google Scholar] [CrossRef]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Liberge, E.; Hamdouni, A. Reduced Order Modelling method via Proper Orthogonal Decomposition (POD) for flow around an oscillating cylinder. J. Fluids Struct. 2010, 26, 292–311. [Google Scholar] [CrossRef]
- Xie, L.; Jin, S.Y.; Wang, Y.Z.; Yu, J. PIV measurement and POD analysis of inner flow field in 90°bending duct of circular-section with fore-end valve. J. Exp. Fluid Mech. 2012, 26, 21–25. [Google Scholar]
- Liu, M.; Tan, L.; Cao, S. Dynamic mode decomposition of cavitating flow around ALE 15 hydrofoil. Renew. Energy 2019, 139, 214–227. [Google Scholar] [CrossRef]
- Wu, L.; Chen, K.; Zhan, C. Snapshot POD analysis of transient flow in the pilot stage of a jet pipe servo valve. J. Turbul. 2018, 19, 889–909. [Google Scholar] [CrossRef]
- Resseguier, V.; Mémin, E.; Heitz, D.; Chapron, B. Stochastic modelling and diffusion modes for POD models and small-scale flow analysis. J. Fluid Mech. 2017, 826, 888–917. [Google Scholar] [CrossRef]
- Wu, Y.Z.; Tao, R.; Yao, Z.F.; Xiao, R.F.; Wang, F.J. Application and comparison of dynamic mode decomposition methods in the tip leakage cavitation of a hydrofoil case. Phys. Fluids 2023, 35, 023326. [Google Scholar] [CrossRef]
- Huang, B.; Wang, G.Y.; Zhao, Y.; Wu, Q. Physical and numerical investigation on transient cavitating flows. Sci. China Technol. Sci. 2013, 56, 2207–2218. [Google Scholar] [CrossRef]
- Wu, Y.Z.; Li, P.X.; Tao, R.; Zhu, D.; Xiao, R.F. Improvement of mode selection criterion of dynamic mode decomposition in a hydrofoil cavitation multiphase flow case. Ocean Eng. 2022, 265, 112579. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Zwart, P.J.; Gerber, A.G.; Belamri, T. A two-phase flow model for predicting cavitation dynamics. In Proceedings of the Fifth International Conference on Multiphase Flow, Yokohama, Japan, 30 May–4 June 2004. [Google Scholar]
- Bao, Y.D.; Wu, Y.P.; He, Y. Optimal mix forecasting method based on BP neural network and its application. J. Agric. Mech. Res. 2004, 3, 162–164. [Google Scholar]
- Dular, M.; Bachert, R.; Schaad, C.; Stoffel, B. Investigation of a re-entrant jet reflection at an inclined cavity closure line. Eur. J. Mech. B/Fluids 2007, 26, 688–705. [Google Scholar] [CrossRef]
- Trummler, T.; Schmidt, S.J.; Adams, N.A. Investigation of condensation shocks and re-entrant jet dynamics in a cavitating nozzle flow by Large-Eddy Simulation. Int. J. Multiph. Flow 2020, 125, 103215. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
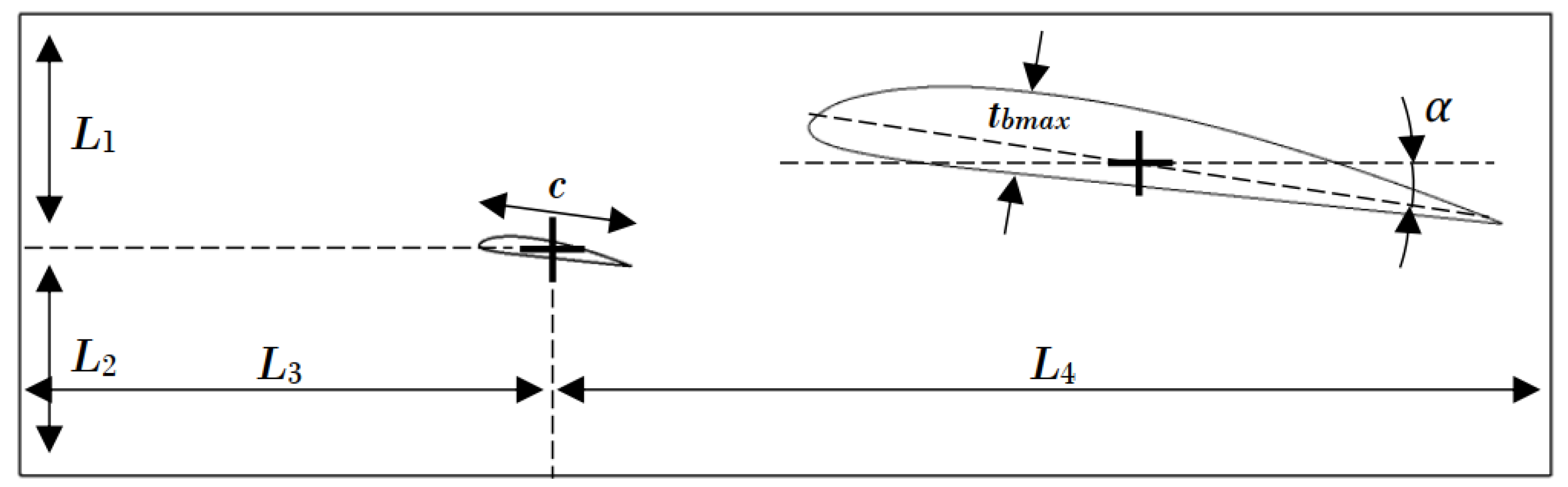
| Parameter | Value | Unit | Description |
|---|---|---|---|
| L1 | 105 | mm | 1.5 c length |
| L2 | 105 | mm | 1.5 c length |
| L3 | 245 | mm | 3.5 c length |
| L4 | 455 | mm | 6.5 c length |
| c | 70 | mm | chord |
| tbmax | 8.27 | mm | maximum thickness |
| α | 8 | degrees | incidence angle |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guang, W.; Wang, P.; Zhang, J.; Yuan, L.; Wang, Y.; Feng, G.; Tao, R. Reduced Order Data-Driven Analysis of Cavitating Flow over Hydrofoil with Machine Learning. J. Mar. Sci. Eng. 2024, 12, 148. https://doi.org/10.3390/jmse12010148
Guang W, Wang P, Zhang J, Yuan L, Wang Y, Feng G, Tao R. Reduced Order Data-Driven Analysis of Cavitating Flow over Hydrofoil with Machine Learning. Journal of Marine Science and Engineering. 2024; 12(1):148. https://doi.org/10.3390/jmse12010148
Chicago/Turabian StyleGuang, Weilong, Peng Wang, Jinshuai Zhang, Linjuan Yuan, Yue Wang, Guang Feng, and Ran Tao. 2024. "Reduced Order Data-Driven Analysis of Cavitating Flow over Hydrofoil with Machine Learning" Journal of Marine Science and Engineering 12, no. 1: 148. https://doi.org/10.3390/jmse12010148