
A Coupled Overlapping Finite Element Method for Analyzing Underwater Acoustic Scattering Problems
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Formulation of Overlapping Elements
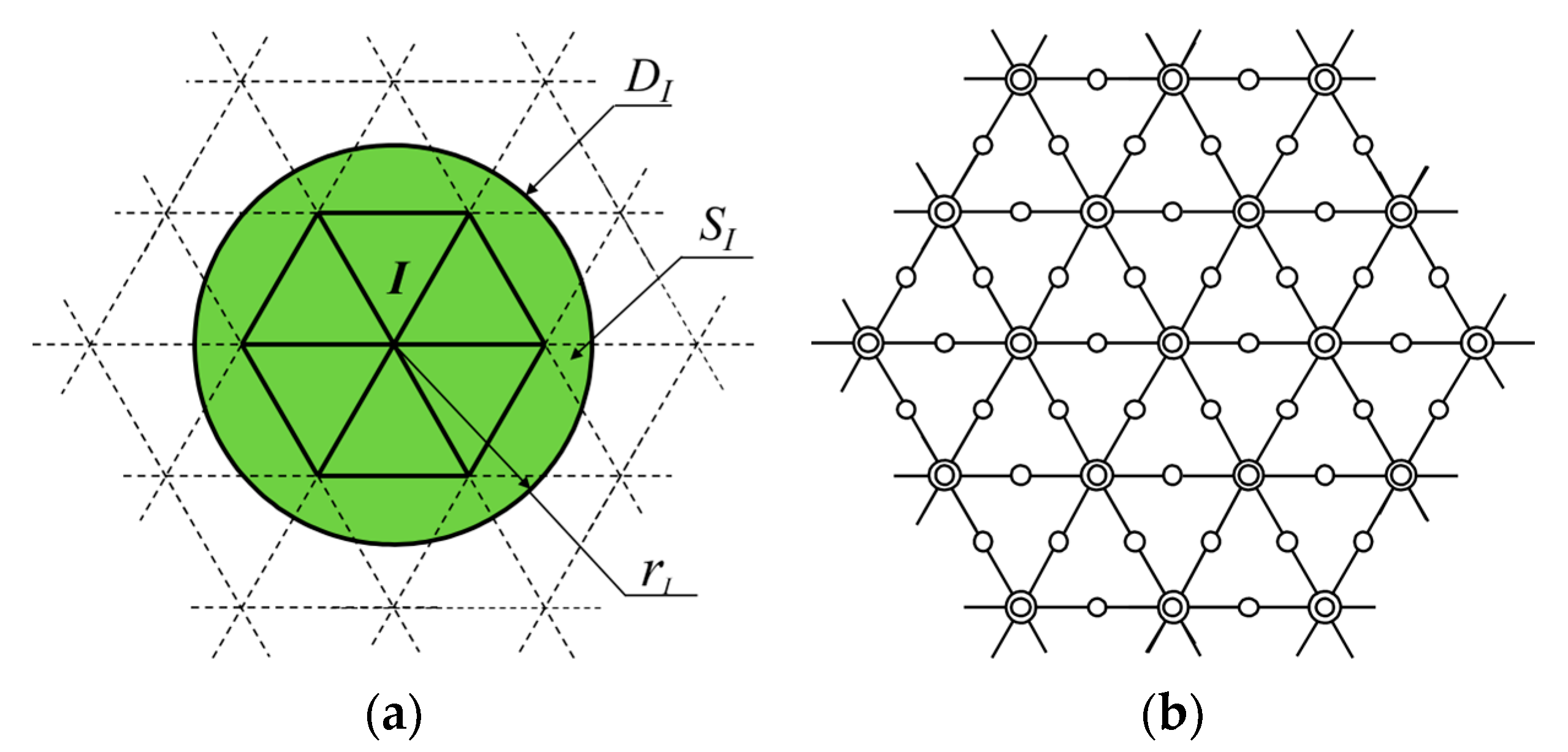
2.1. Local Interpolation
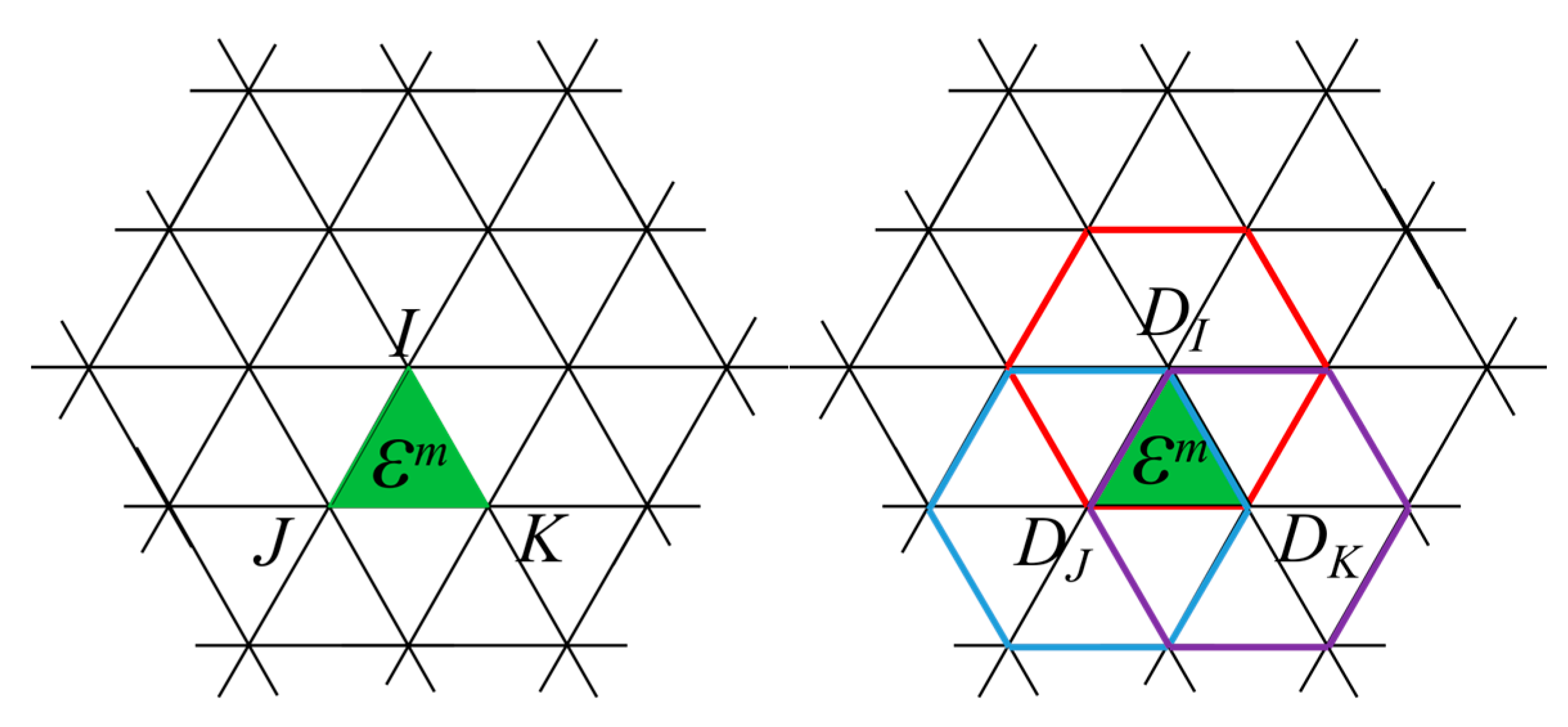
2.2. Global Interpolation
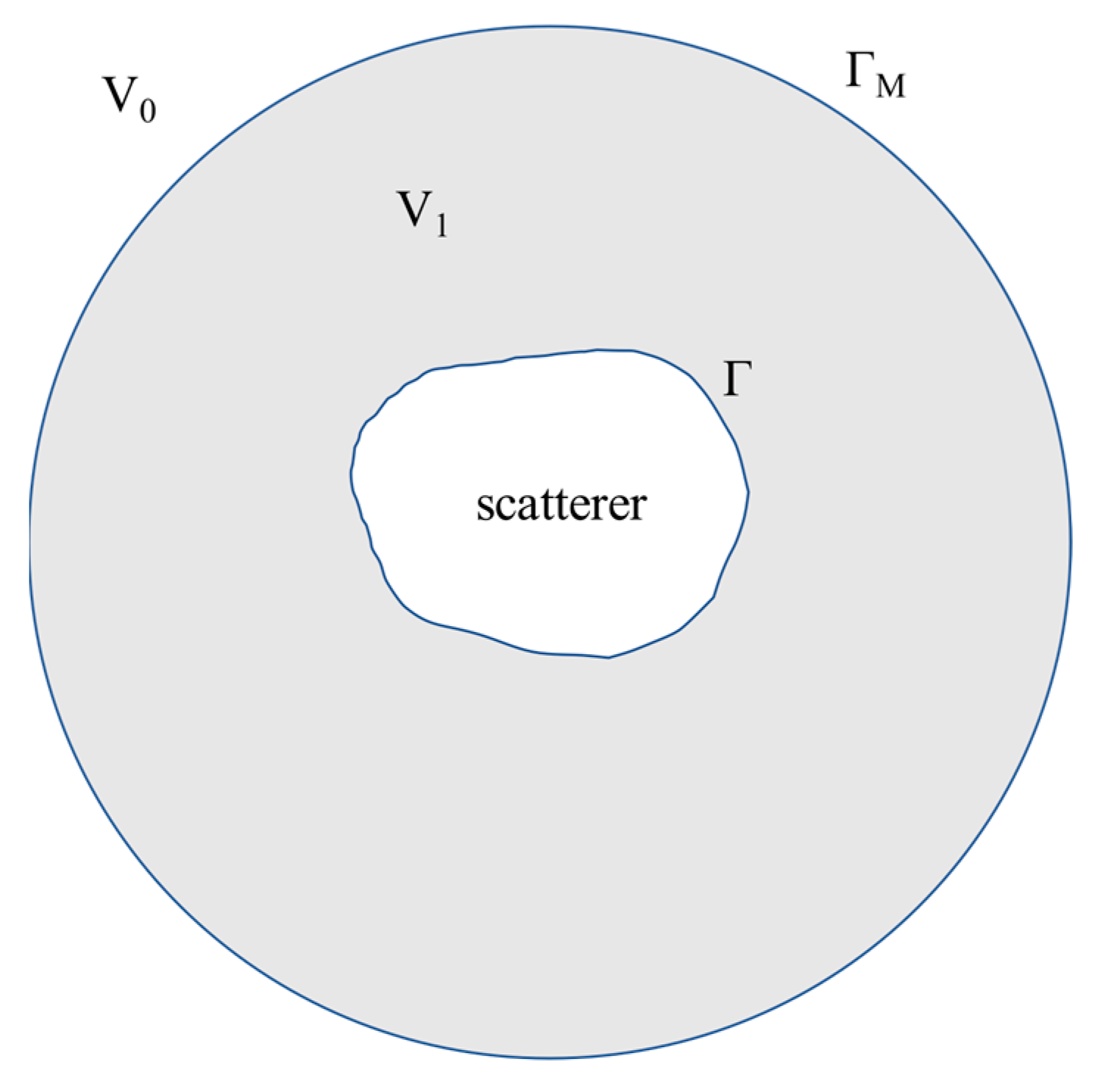
3. The Standard Galerkin Weak Form for the Exterior Acoustics
4. Numerical Tests
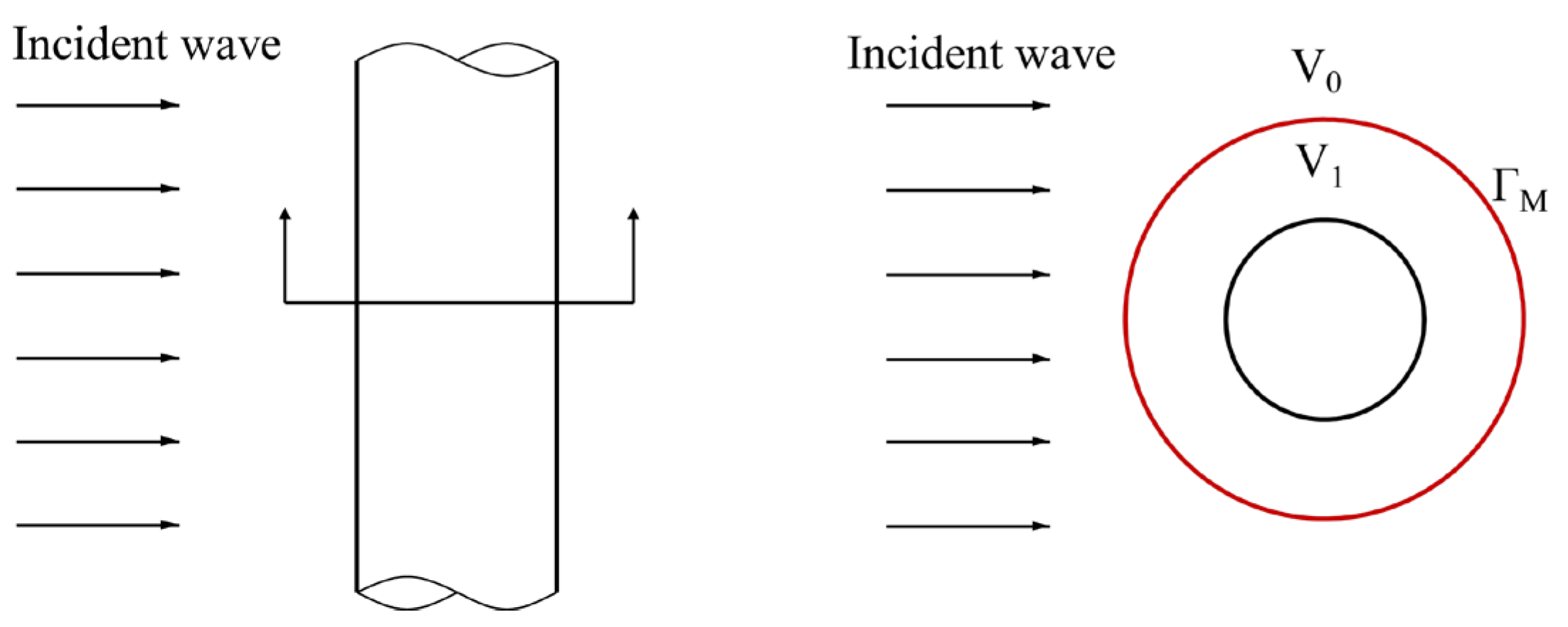
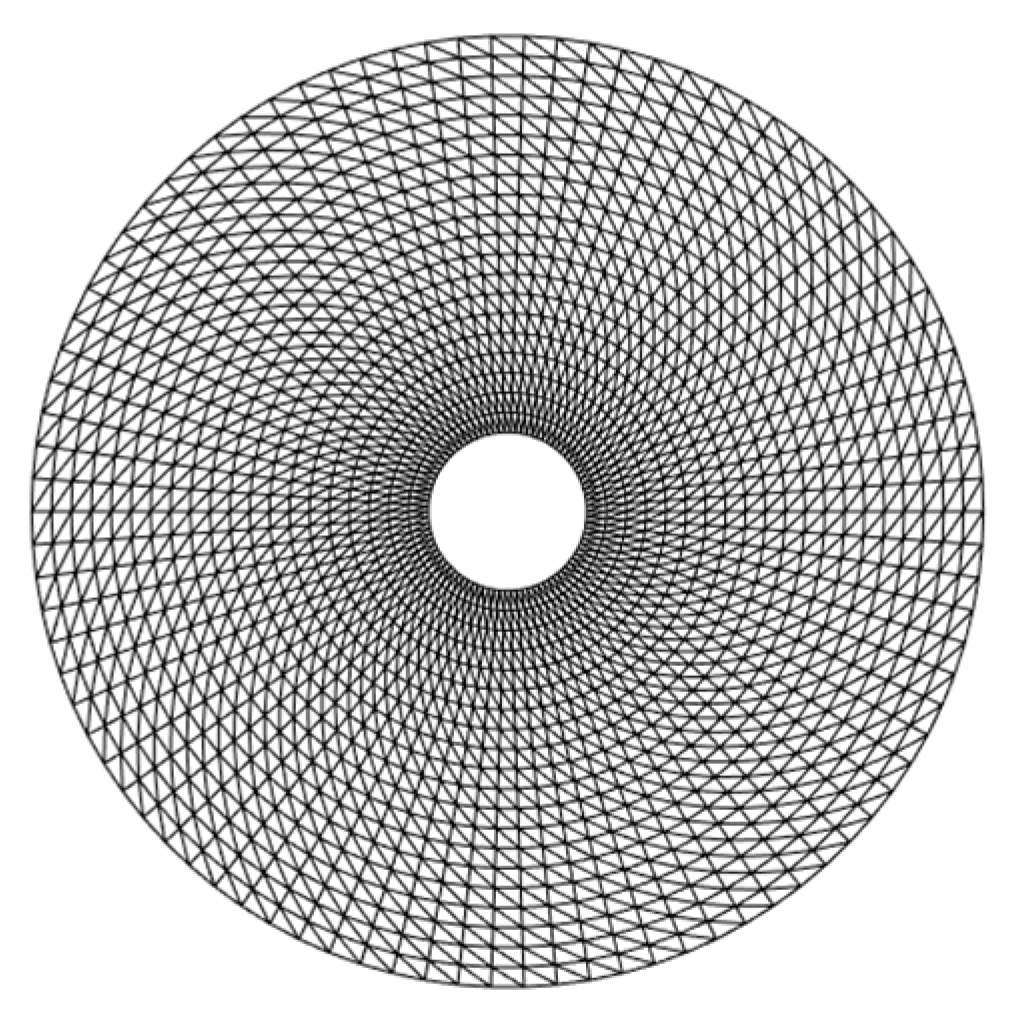
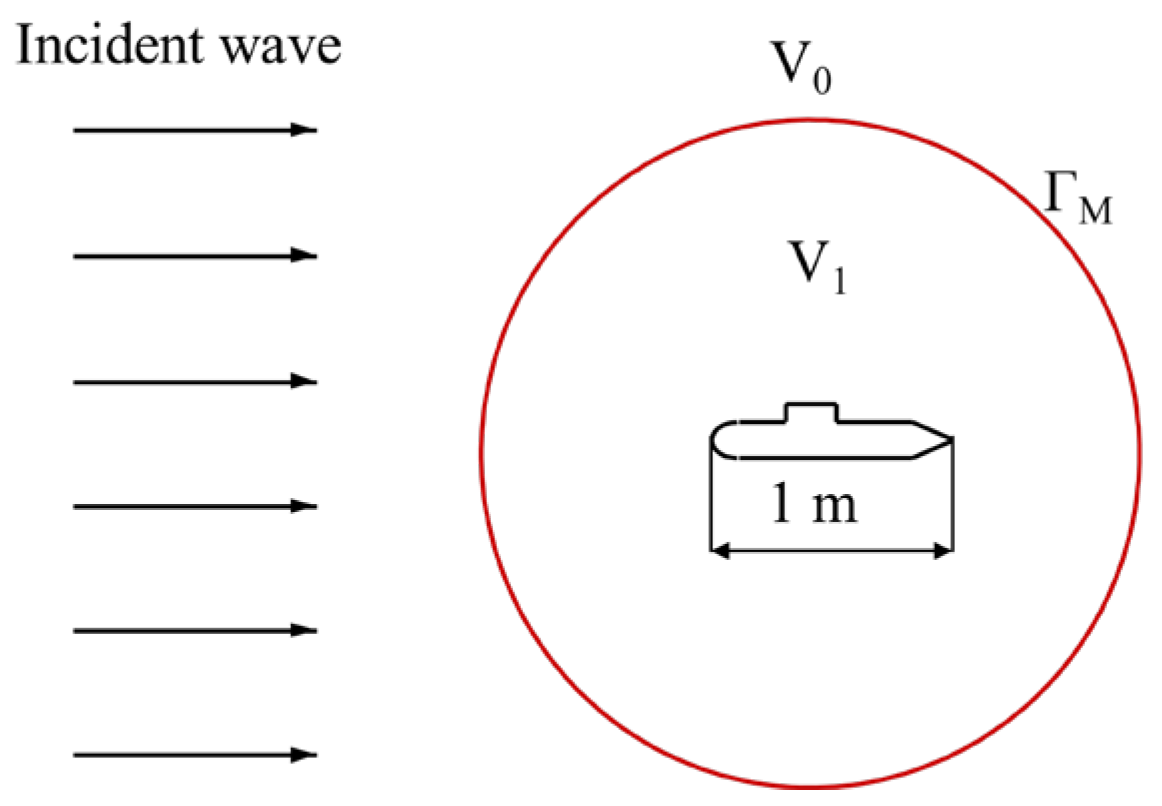
4.1. Cylinder Scattering in Underwater Acoustic Field
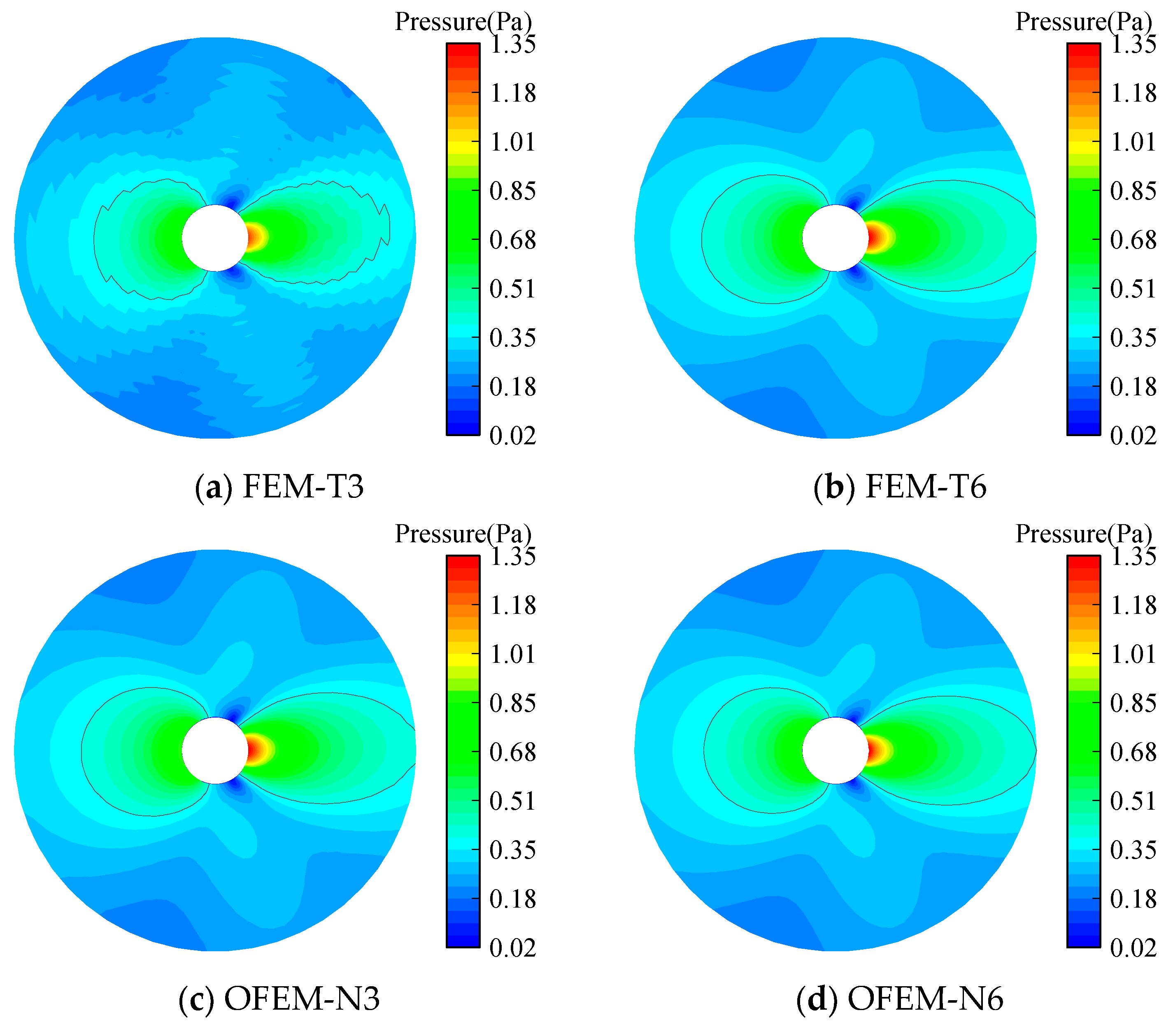
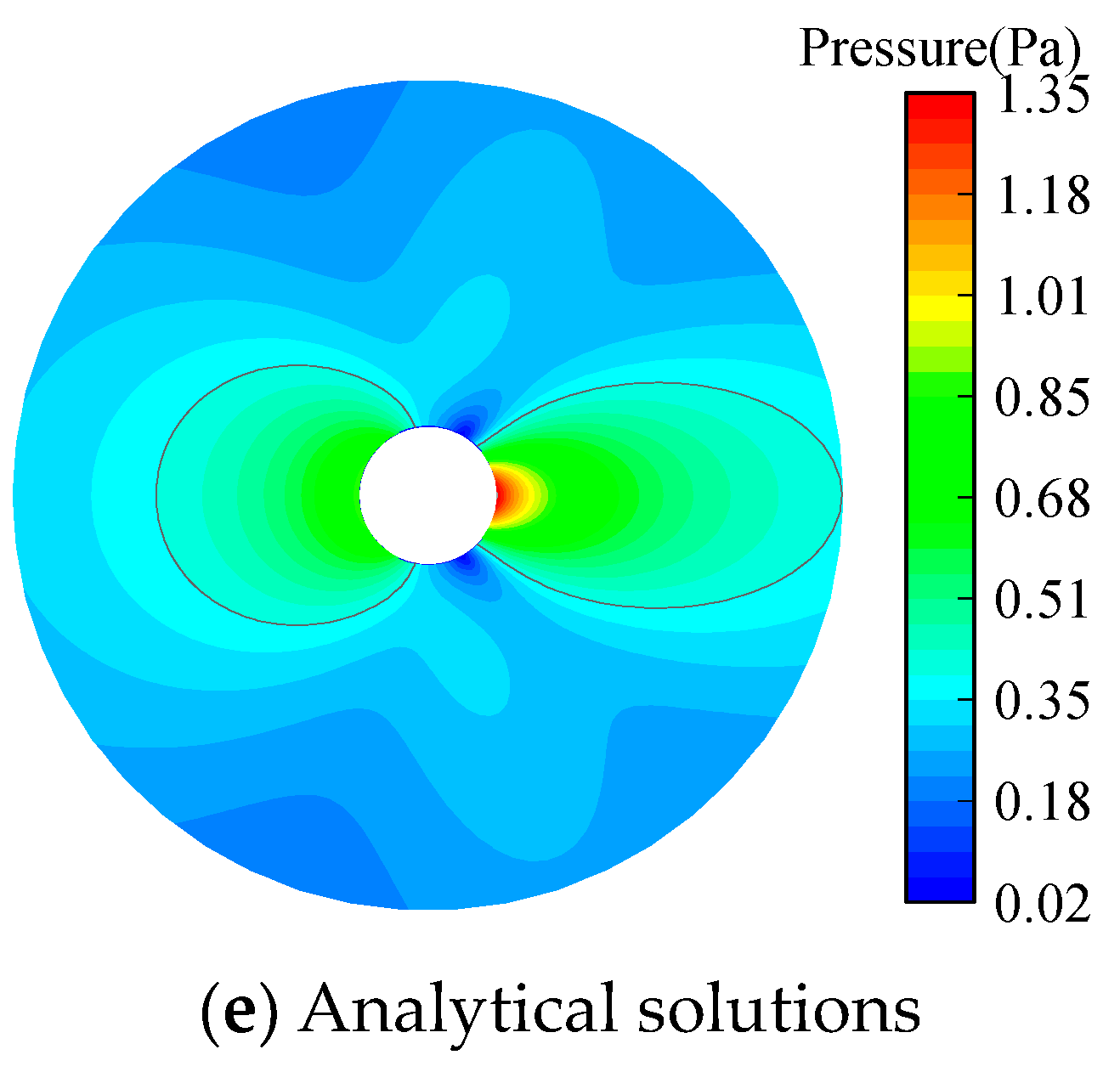
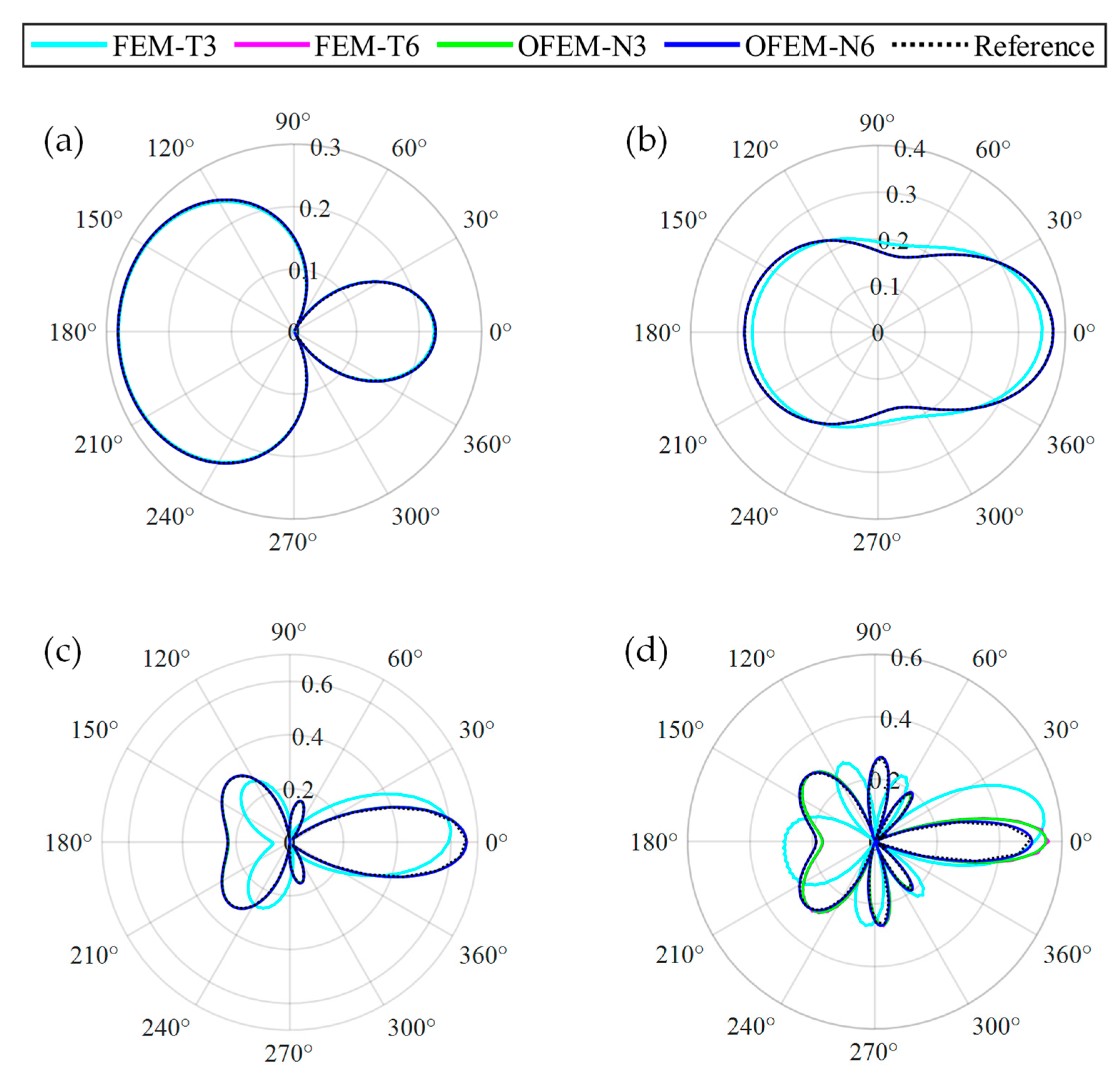
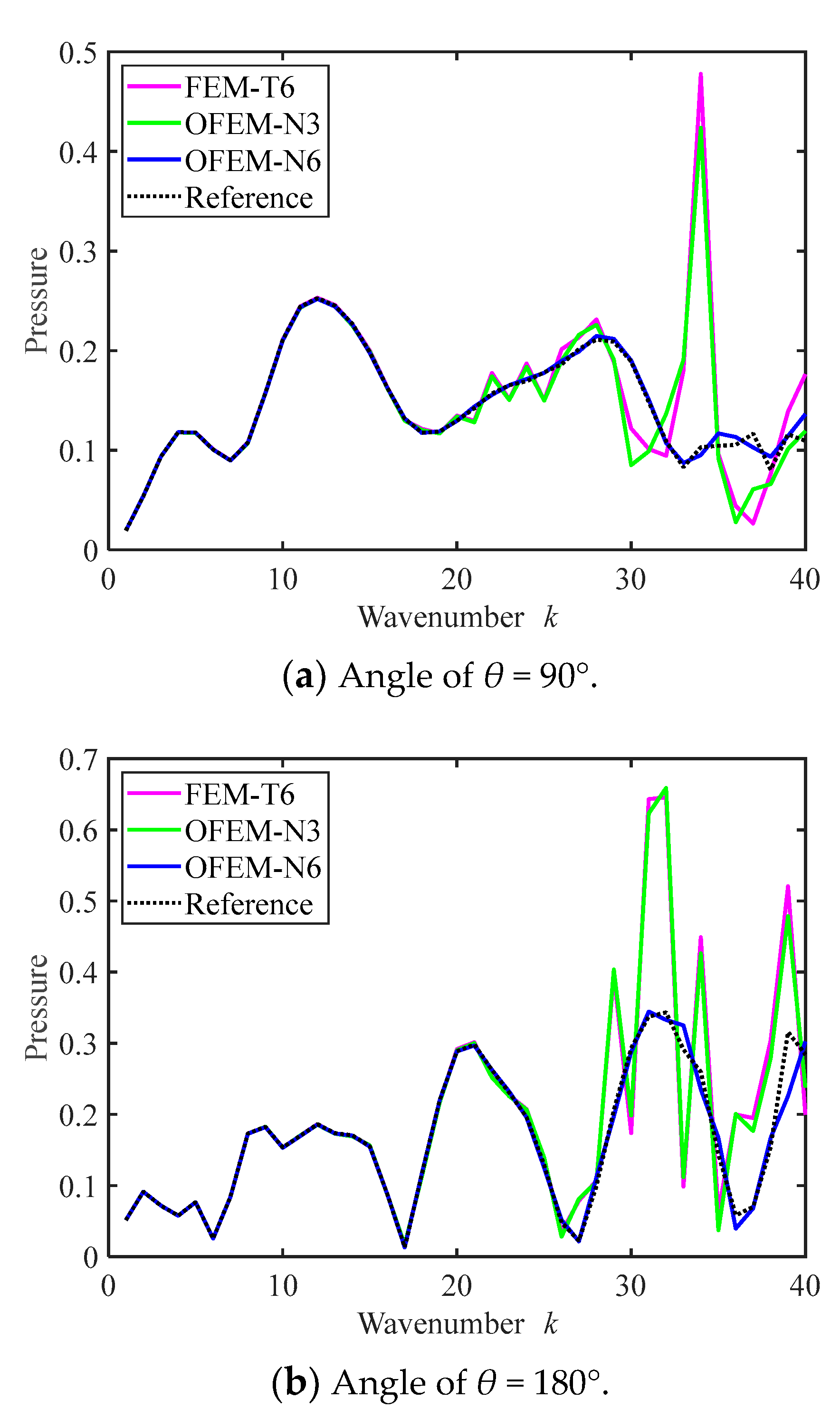
4.1.1. The Computational Accuracy
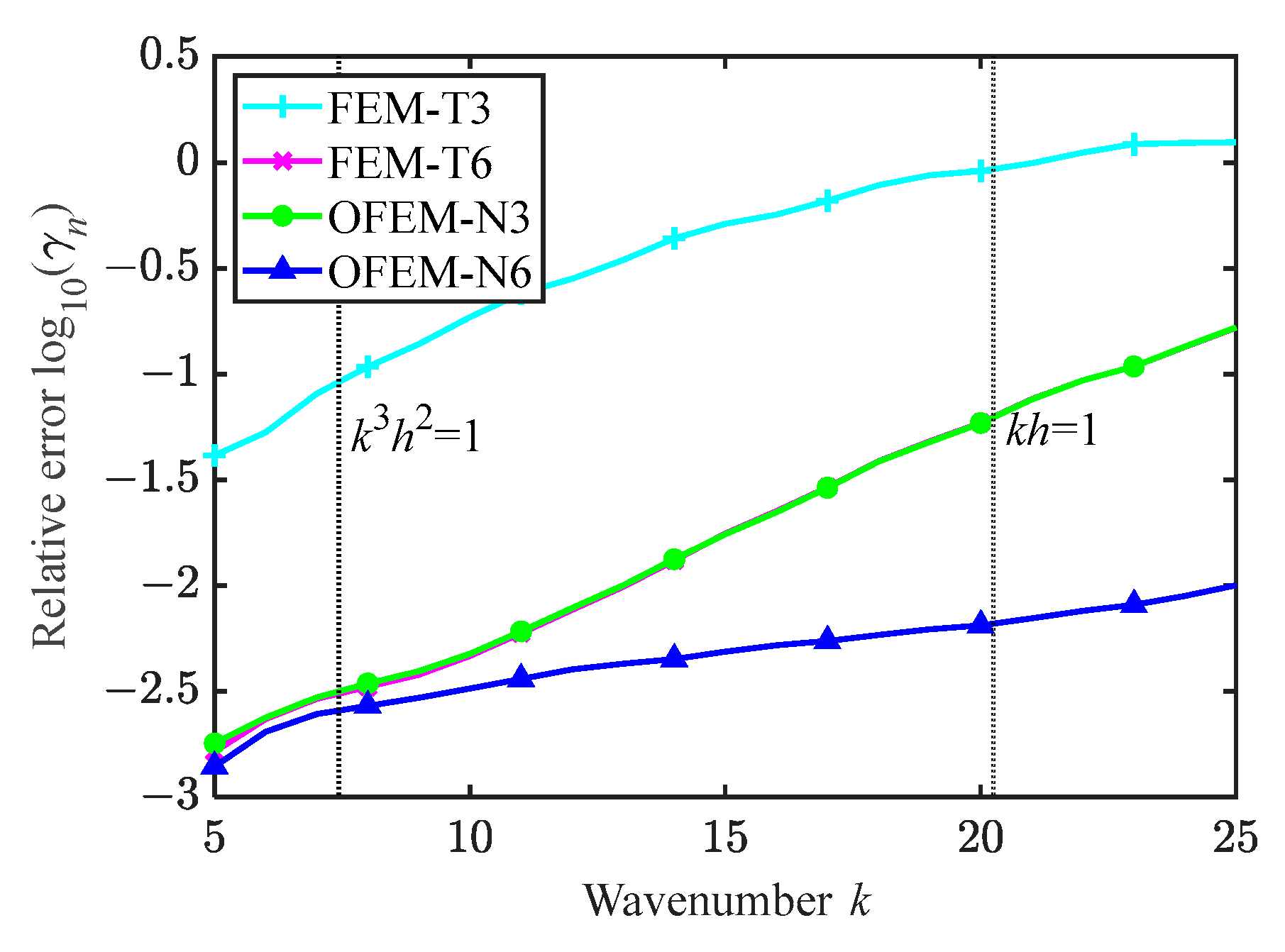
4.1.2. The Control of the Numerical Error
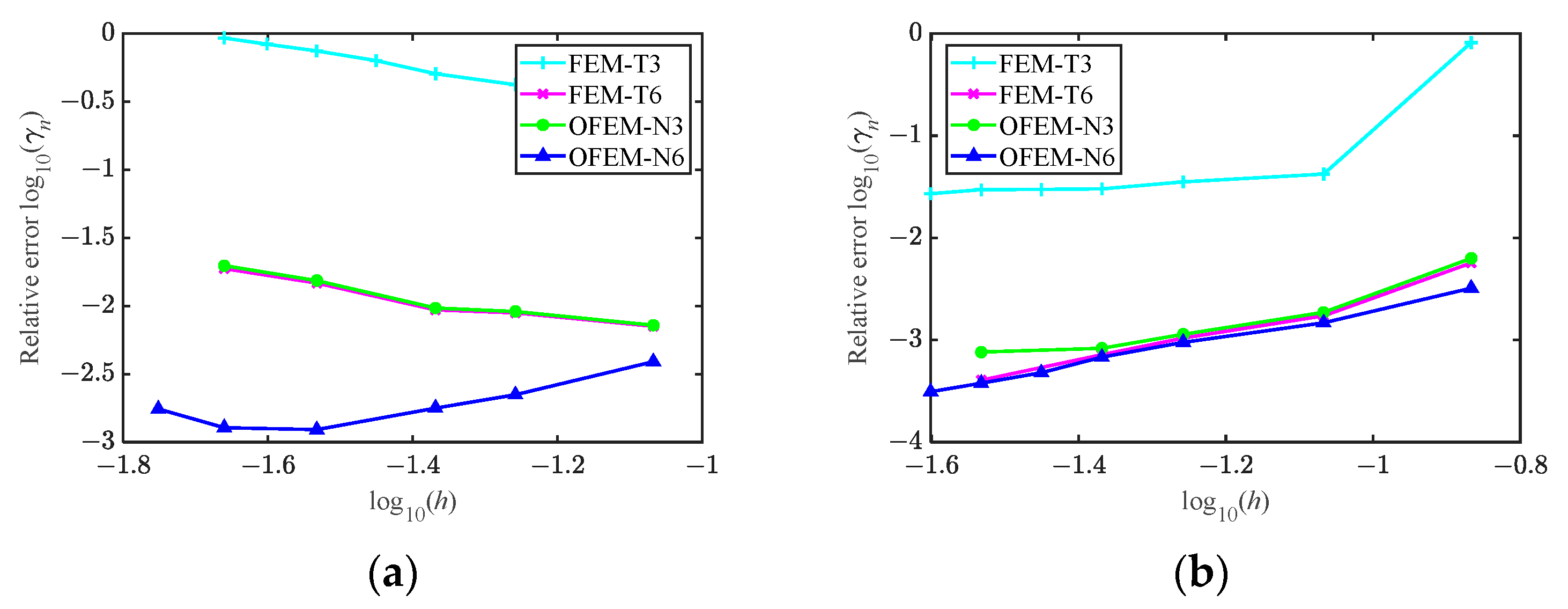
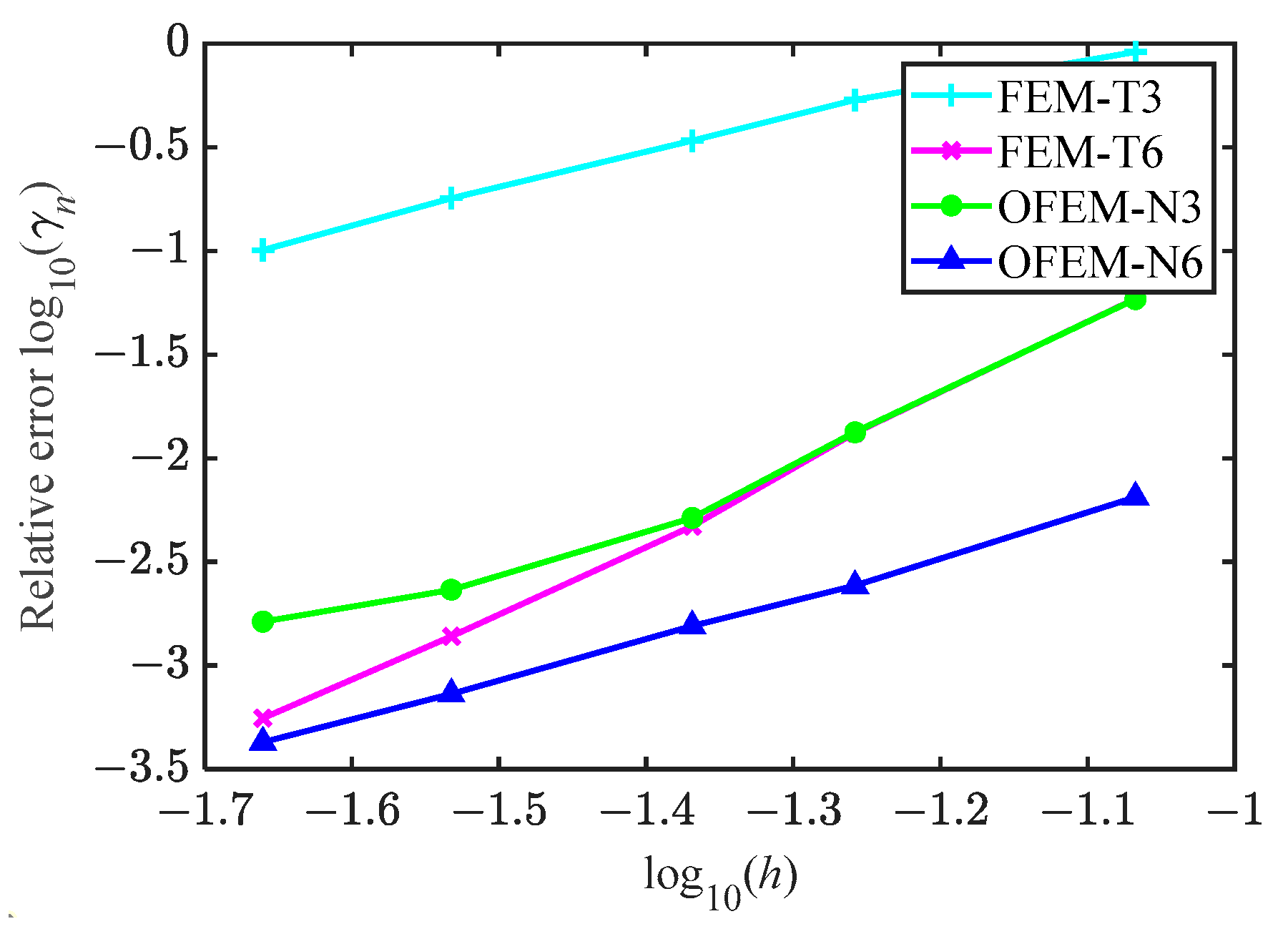
4.1.3. The Convergence Property
4.1.4. Sensitivity to Nodal Irregularity
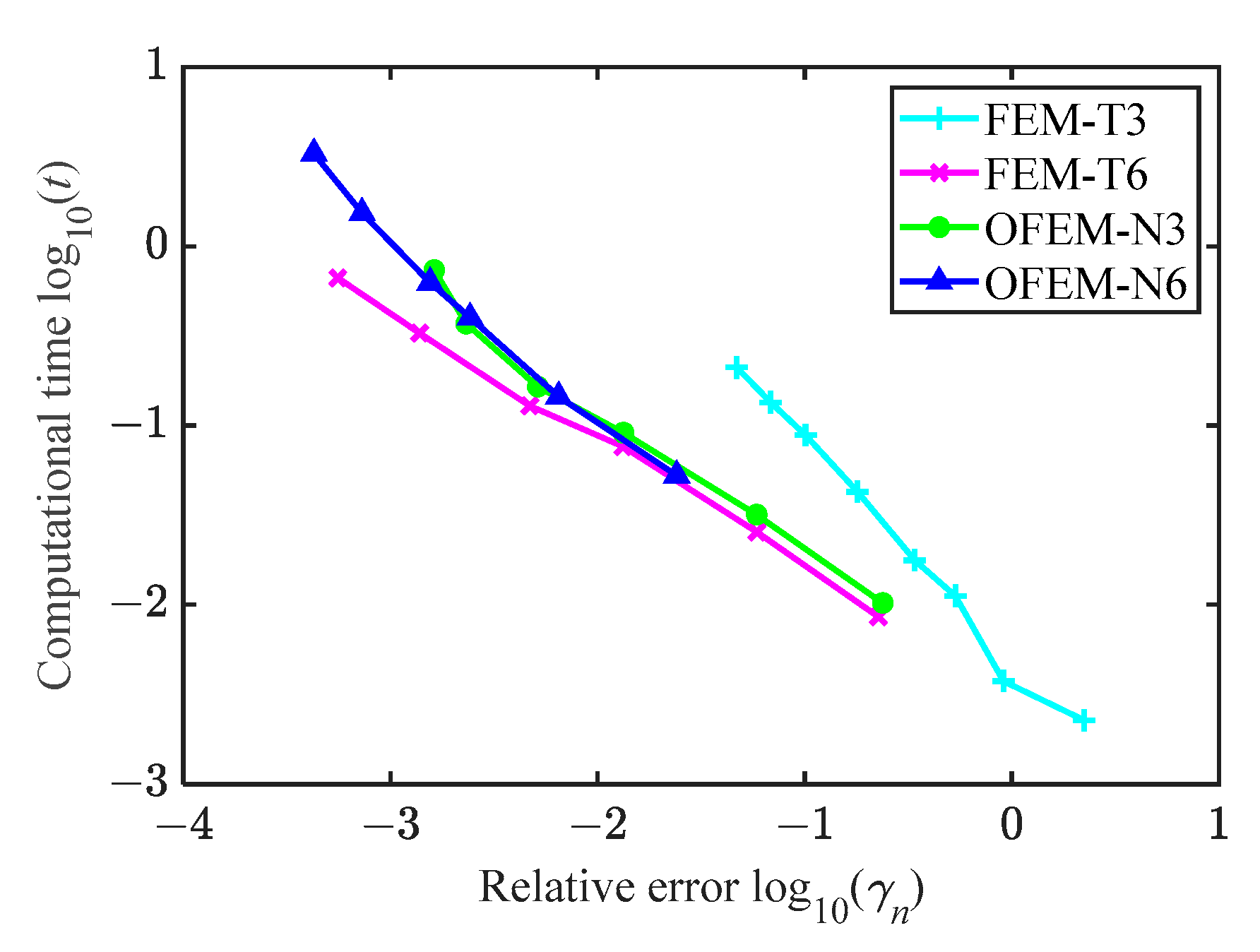
4.1.5. The Computational Efficiency
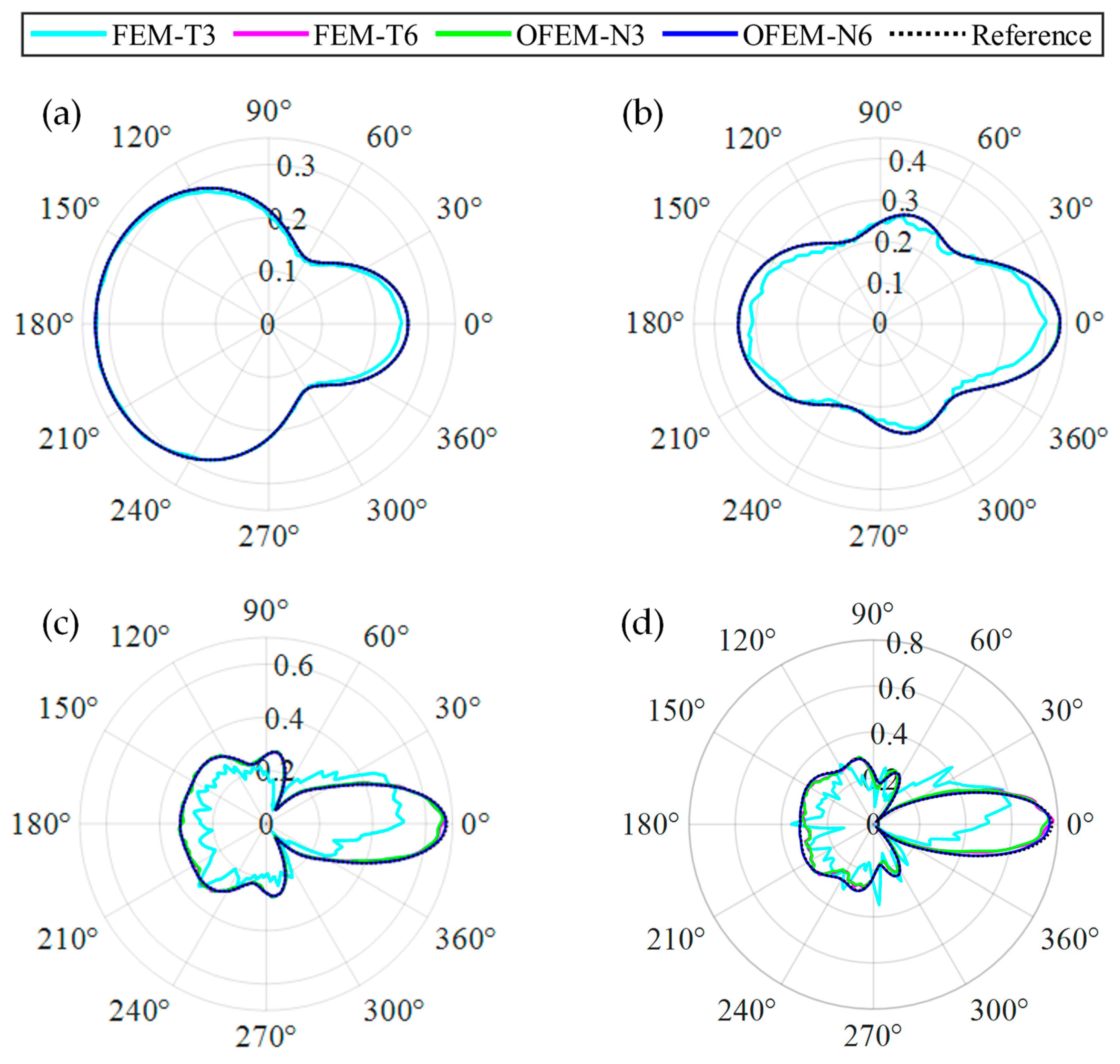
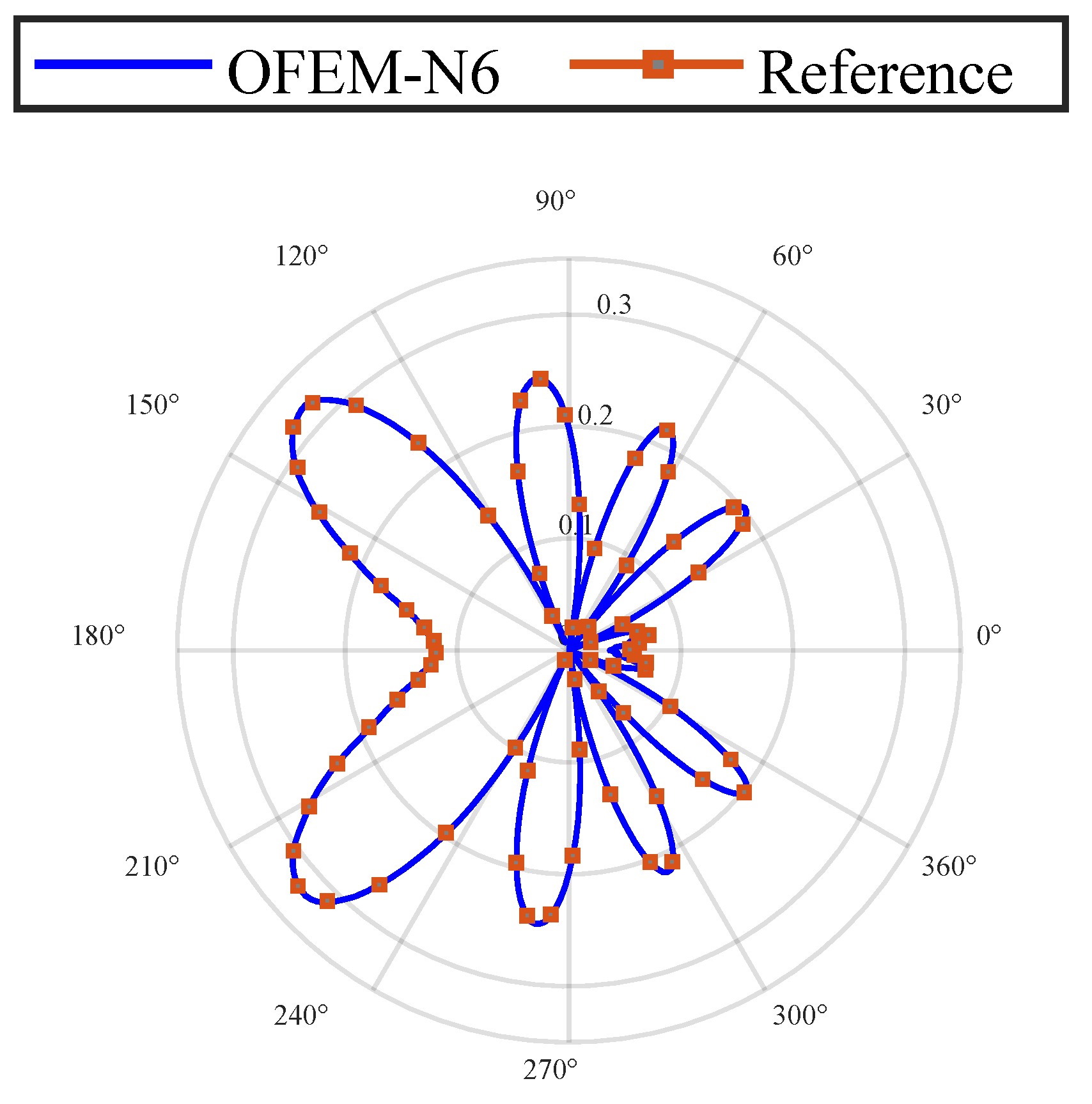
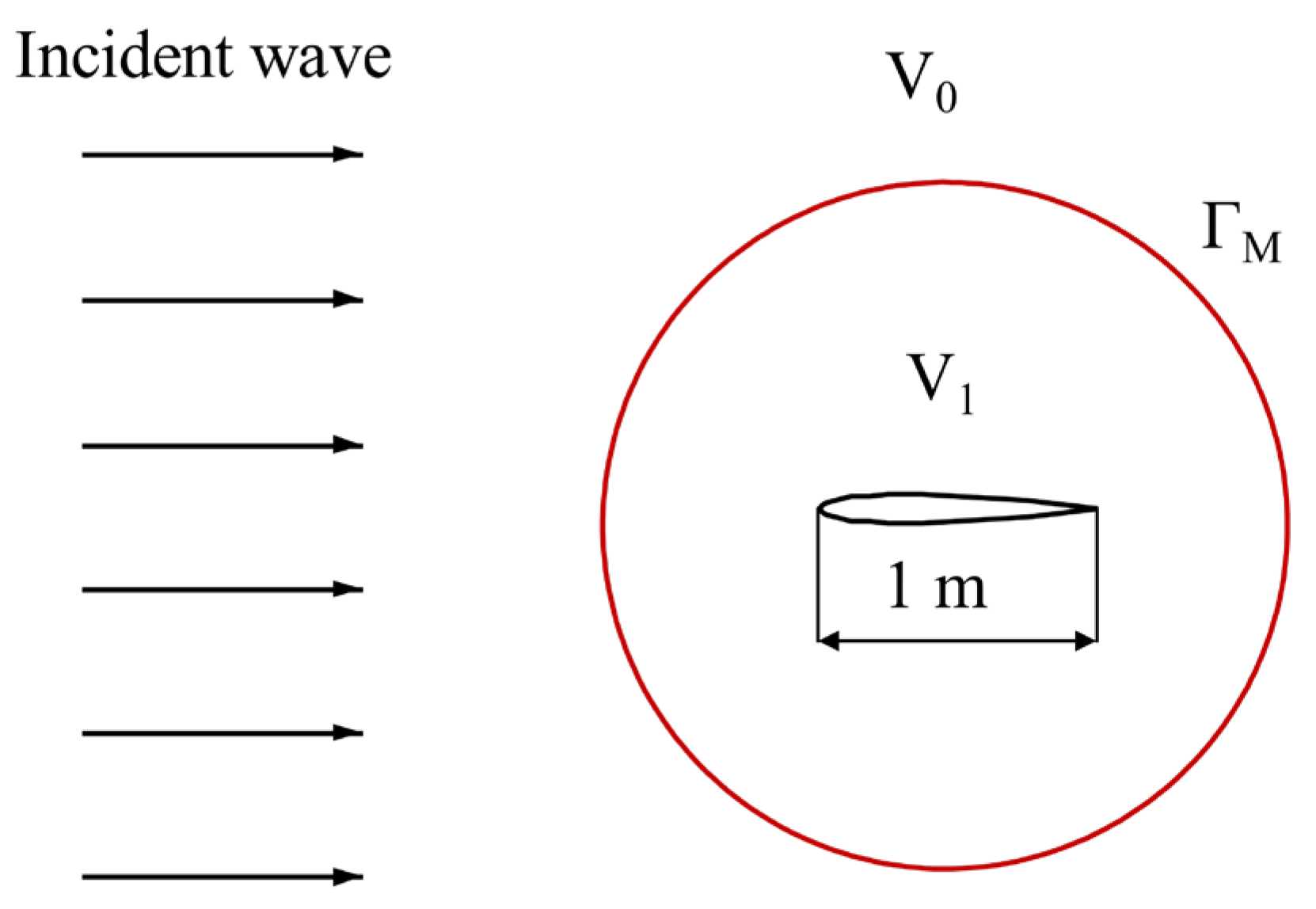
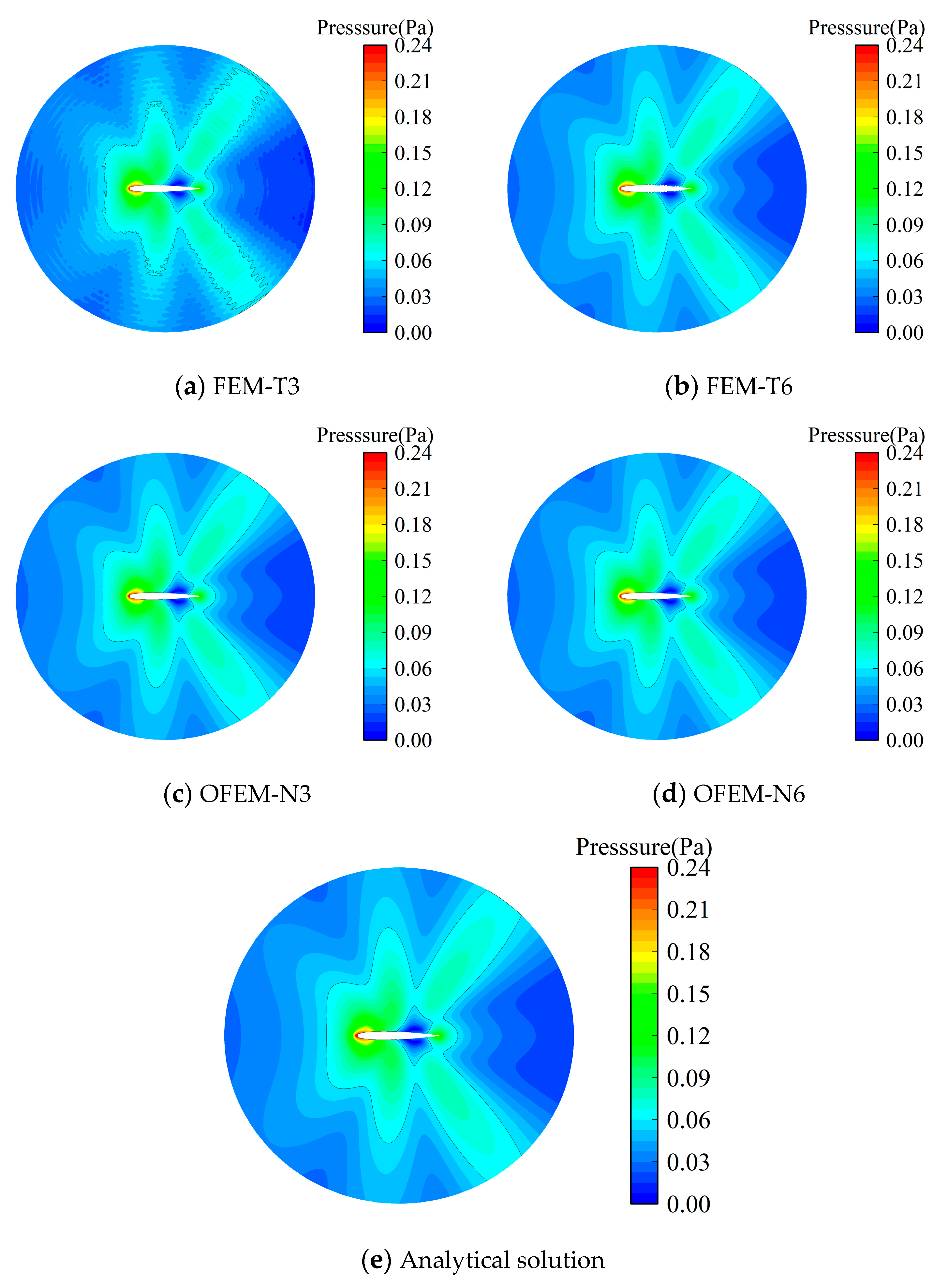
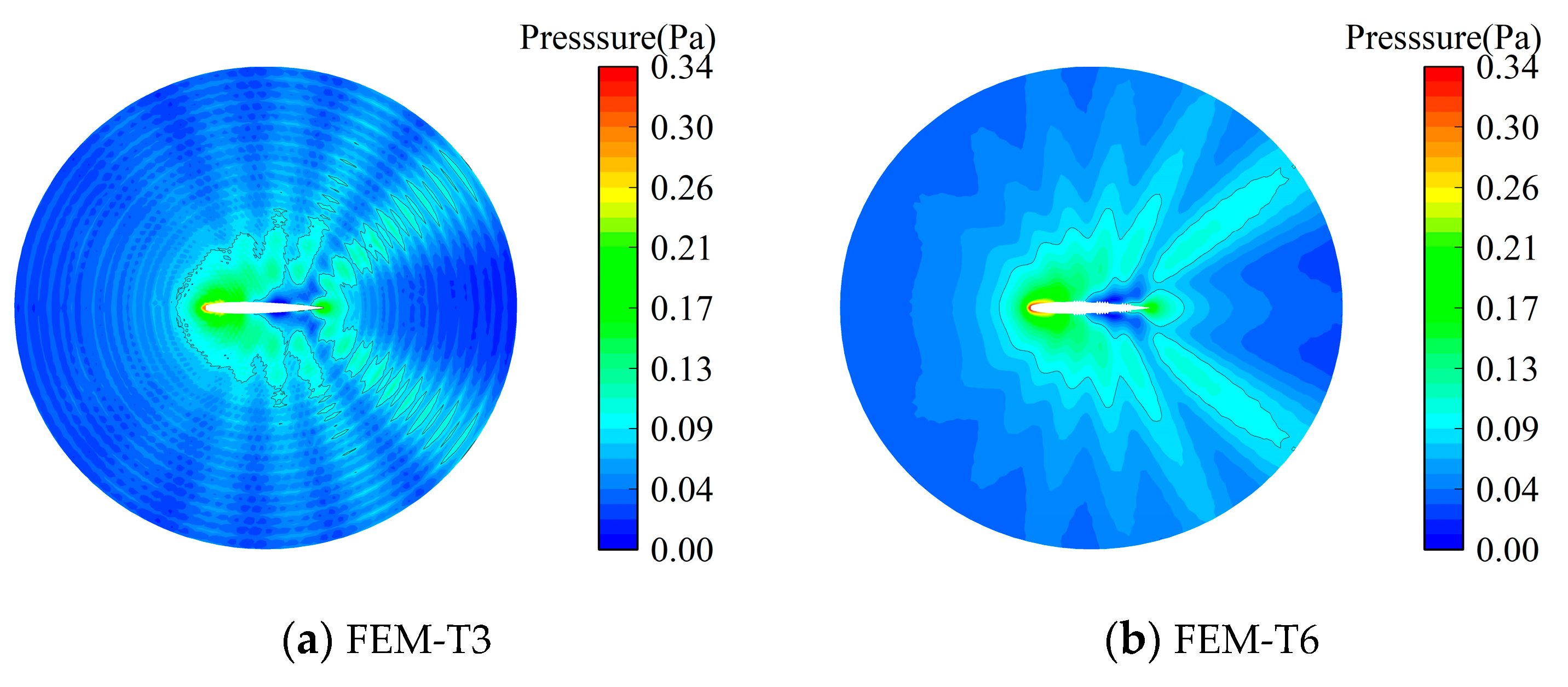
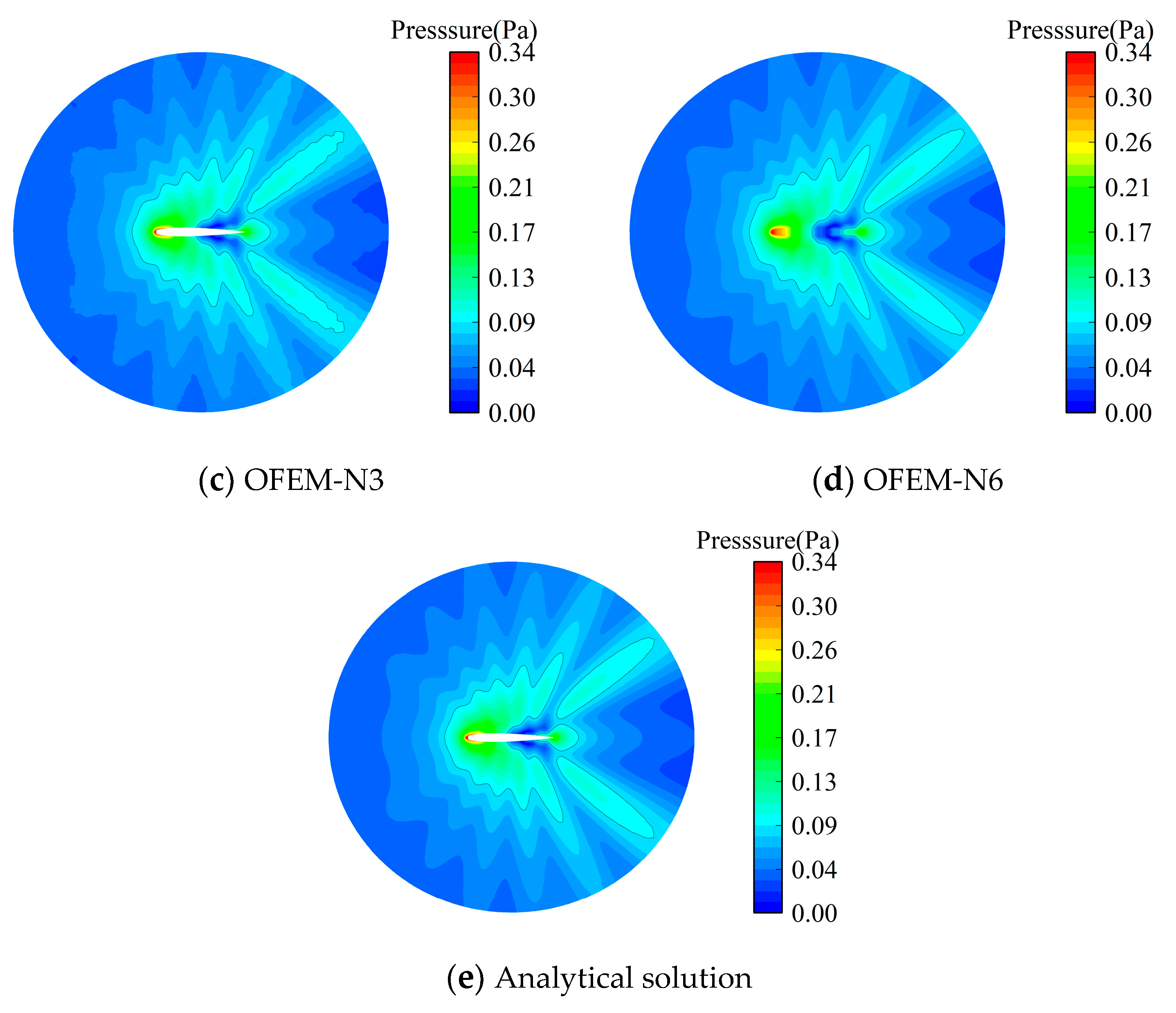
4.2. Scattering by a Rudder-Shaped Scatterer
4.3. Scattering by a Submarine Scatterer
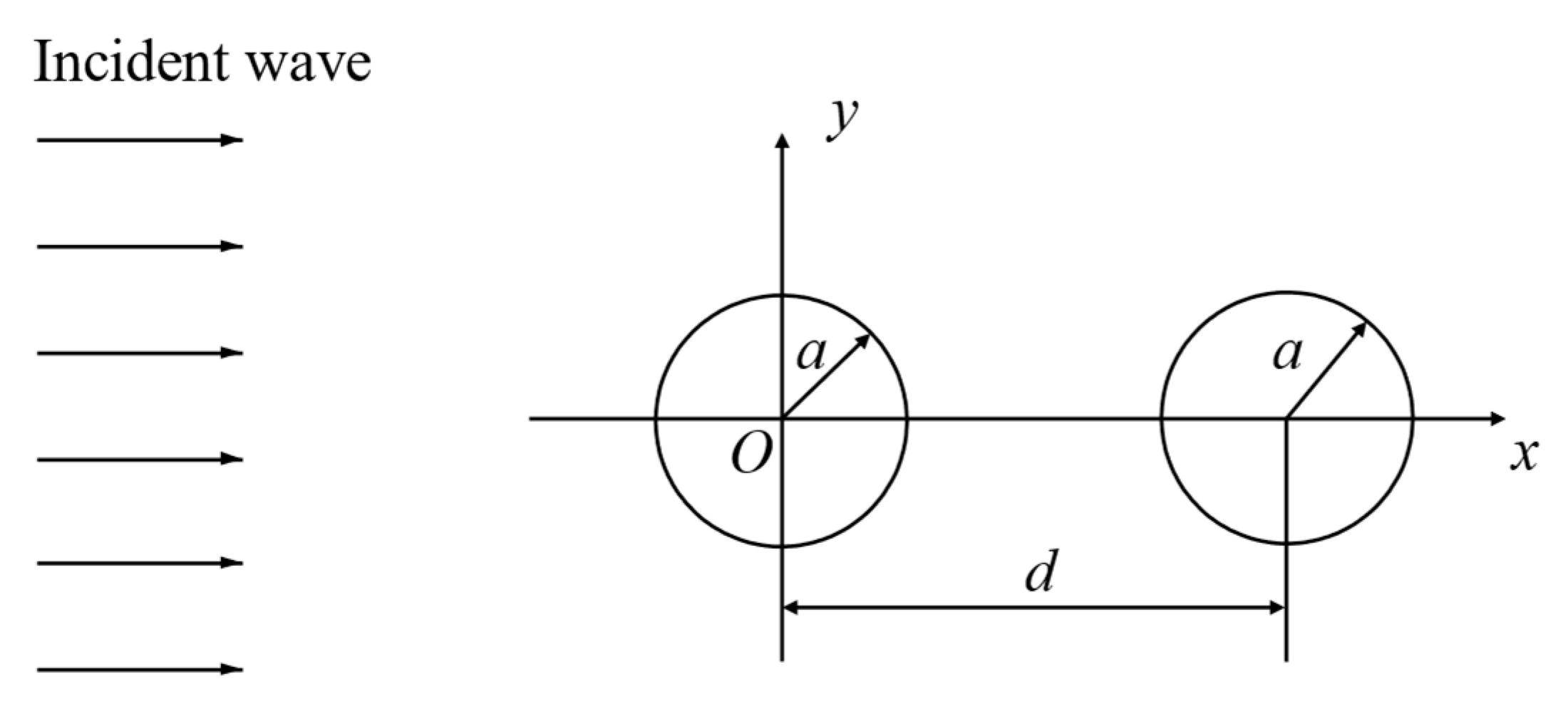
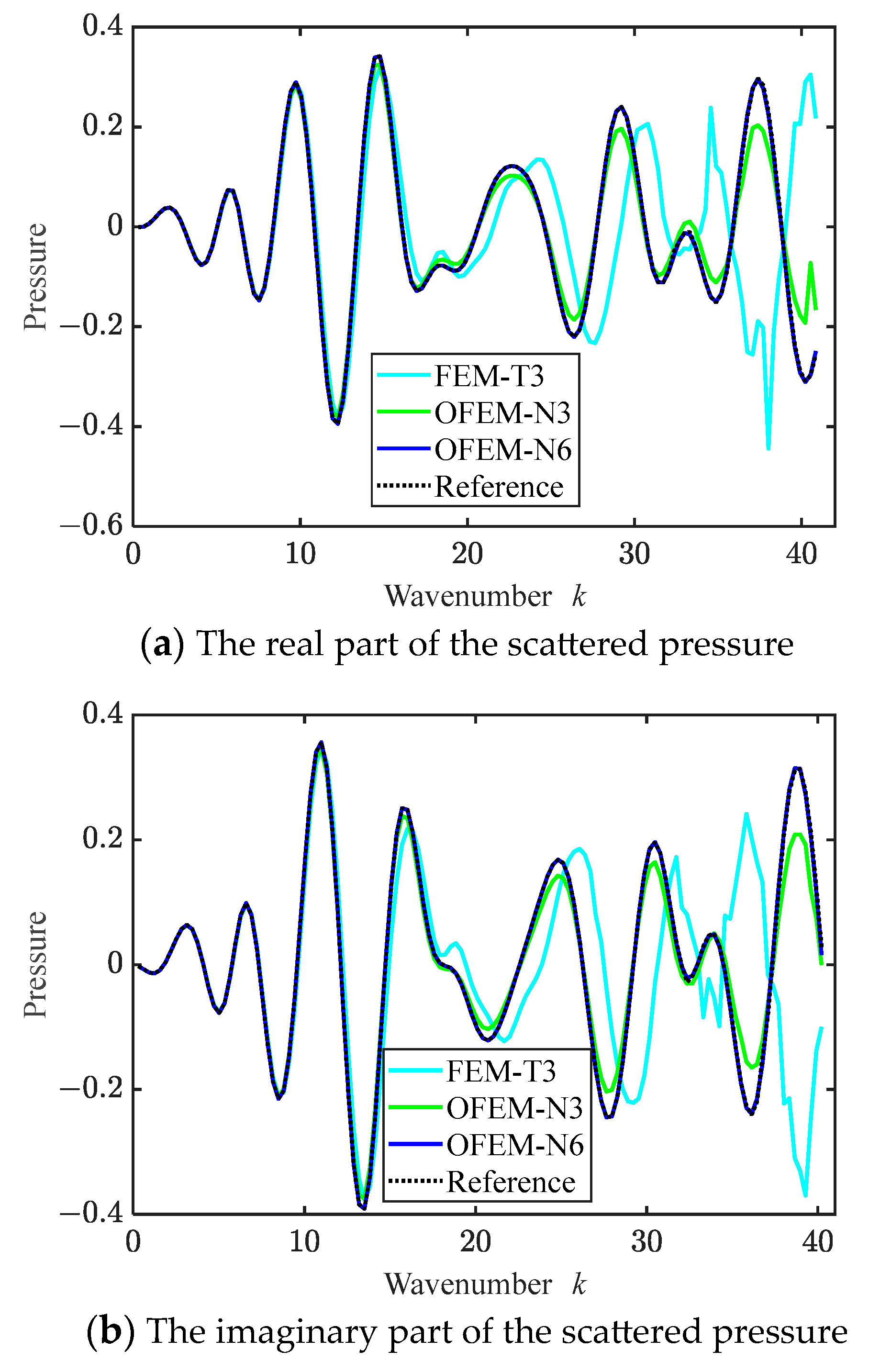
4.4. The Multi-Object Scattering Problem
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gong, Z.X.; Li, W.; Chai, Y.B.; Zhao, Y.; Mitri, F.G. T-matrix method for acoustical Bessel beam scattering from a rigid finite cylinder with spheroidal endcaps. Ocean Eng. 2017, 129, 507–519. [Google Scholar] [CrossRef]
- Zheng, Z.Y.; Li, X.L. Theoretical analysis of the generalized finite difference method. Comput. Math. Appl. 2022, 120, 1–14. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.Z.; Chai, Y.B.; Li, W. Graphical acoustic computing method incorporated with the shooting and bouncing ray: Application to target strength prediction of concave objects with second-order reflection effects. J. Sound Vibr. 2022, 541, 117358. [Google Scholar] [CrossRef]
- Fu, Z.J.; Xie, Z.Y.; Ji, S.Y.; Tsai, C.C.; Li, A.L. Meshless generalized finite difference method for water wave interactions with multiple-bottom-seatedcylinder-array structures. Ocean. Eng. 2022, 195, 106736. [Google Scholar] [CrossRef]
- Li, Y.C.; Dang, S.N.; Li, W.; Chai, Y.B. Free and Forced Vibration Analysis of Two-Dimensional Linear Elastic Solids Using the Finite Element Methods Enriched by Interpolation Cover Functions. Mathematics 2022, 10, 456. [Google Scholar] [CrossRef]
- He, Z.C.; Hu, J.Y.; Li, E. An uncertainty model of acoustic metamaterials with random parameters. Comput. Mech. 2018, 62, 1023–1036. [Google Scholar] [CrossRef]
- He, Z.C.; Lin, X.Y.; Li, E. A non-contact acoustic pressure-based method for load identification in acoustic-structural interaction system with non-probabilistic uncertainty. Appl. Acoust. 2019, 148, 223–237. [Google Scholar] [CrossRef]
- Li, E.; He, Z.C.; Wang, G.; Liu, G.R. An efficient algorithm to analyze wave propagation in fluid/solid and solid/fluid phononic crystals. Comput. Methods Appl. Mech. Eng. 2018, 333, 421–442. [Google Scholar] [CrossRef]
- Li, J.P.; Fu, Z.J.; Gu, Y.; Zhang, L. Rapid calculation of large-scale acoustic scattering from complex targets by a dual-level fast direct solver. Comput. Math. Appl. 2023, 130, 1–9. [Google Scholar] [CrossRef]
- Li, J.P.; Fu, Z.J.; Gu, Y.; Zhang, L. Recent advances and emerging applications of the singular boundary method for large-scale and high-frequency computational acoustics. Adv. Appl. Math. Mech. 2022, 14, 315–343. [Google Scholar] [CrossRef]
- Simpson, R.N.; Bordas, S.P.; Lian, H.; Trevelyan, J. An isogeometric boundary element method for elastostatic analysis: 2D implementation aspects. Comput. Struct. 2013, 118, 2–12. [Google Scholar] [CrossRef]
- Qiu, T. Time Domain Boundary Integral Equation Methods in Acoustics, Heat Diffusion and Electromagnetism. Ph.D. Thesis, University of Delaware, Newark, DE, USA, 2016. [Google Scholar]
- Kirkup, S. The Boundary Element Method in Acoustics: A Survey. Appl. Sci. 2019, 9, 1642. [Google Scholar] [CrossRef]
- Gu, Y.; Lei, J. Fracture mechanics analysis of two-dimensional cracked thin structures (from micro- to nano-scales) by an efficient boundary element analysis. Results Appl. Math. 2021, 11, 100172. [Google Scholar] [CrossRef]
- Liu, Y.J. Fast Multipole Boundary Element Method: Theory and Applications in Engineering; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Ayala, T.; Videla, J.; Anitescu, C.; Atroshchenko, E. Enriched Isogeometric Collocation for two-dimensional time-harmonic acoustics. Comput. Methods Appl. Mech. Eng. 2020, 365, 113033. [Google Scholar] [CrossRef]
- Sun, T.T.; Wang, P.; Zhang, G.J.; Chai, Y.B. Transient analyses of wave propagations in nonhomogeneous media employing the novel finite element method with the appropriate enrichment function. Comput. Math. Appl. 2023, 139, 90–112. [Google Scholar] [CrossRef]
- Chai, Y.B.; Huang, K.Y.; Wang, S.P.; Xiang, Z.C.; Zhang, G.J. The Extrinsic Enriched Finite Element Method with Appropriate Enrichment Functions for the Helmholtz Equation. Mathematics 2023, 11, 1664. [Google Scholar] [CrossRef]
- Ihlenburg, F.; Babuška, I. Finite element solution of the Helmholtz equation with high wave number Part I: The h-version of the FEM. Comput. Math. Appl. 1995, 30, 9–37. [Google Scholar] [CrossRef]
- Ihlenburg, F.; Babuška, I. Finite element solution of the Helmholtz equation with high wave number part II: The hp version of the FEM. SIAM J. Numer. Anal. 1997, 34, 315–358. [Google Scholar] [CrossRef]
- Liu, G.R.; Trung, N.T. Smoothed Finite Element Methods; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Zeng, W.; Liu, G.R. Smoothed Finite Element Methods (S-FEM): An Overview and Recent Developments. Arch. Computat. Methods Eng. 2018, 25, 397–435. [Google Scholar] [CrossRef]
- Chai, Y.B.; Li, W.; Liu, Z.Y. Analysis of transient wave propagation dynamics using the enriched finite element method with interpolation cover functions. Appl. Math. Comput. 2022, 412, 126564. [Google Scholar] [CrossRef]
- Li, W.; Gong, Z.X.; Chai, Y.B.; Cheng, C.; Li, T.Y.; Zhang, Q.F.; Wang, M.S. Hybrid gradient smoothing technique with discrete shear gap method for shell structures. Comput. Math. Appl. 2017, 74, 1826–1855. [Google Scholar] [CrossRef]
- Chai, Y.B.; Li, W.; Gong, Z.X.; Li, T.Y. Hybrid smoothed finite element method for two-dimensional underwater acoustic scattering problems. Ocean Eng. 2016, 116, 129–141. [Google Scholar] [CrossRef]
- Melenk, J.M.; Babuška, I. The partition of unity finite element method: Basic theory and applications. Comput. Methods Appl. Mech. Eng. 1996, 139, 289–314. [Google Scholar] [CrossRef]
- Babuška, I.; Melenk, J.M. The partition of unity method. Int. J. Numer. Methods Eng. 1997, 40, 727–758. [Google Scholar] [CrossRef]
- Duarte, C.A.; Babuška, I.; Oden, J.T. Generalized finite element methods for three-dimensional structural mechanics problems. Comput. Struct. 1999, 77, 215–232. [Google Scholar] [CrossRef]
- Liu, G.R.; Gu, Y.T. An Introduction to Meshfree Methods and Their Programming; Springer Science & Business Media: Boston, NY, USA, 2005. [Google Scholar]
- Gu, Y.T.; Wang, W.; Zhang, L.C.; Feng, X.Q. An enriched radial point interpolation method (e-RPIM) for analysis of crack tip fields. Eng. Fract. Mech. 2011, 78, 175–190. [Google Scholar] [CrossRef]
- Belytschko, T.; Lu, Y.Y.; Gu, L. Crack propagation by element-free Galerkin methods. Eng. Fract. Mech. 1995, 51, 295–315. [Google Scholar] [CrossRef]
- Bouillard, P.; Suleaub, S. Element-Free Galerkin solutions for Helmholtz problems: Fomulation and numerical assessment of the pollution effect. Comput. Methods Appl. Mech. Eng. 1998, 162, 317–335. [Google Scholar] [CrossRef]
- Li, Y.C.; Liu, C.; Li, W.; Chai, Y.B. Numerical investigation of the element-free Galerkin method (EFGM) with appropriate temporal discretization techniques for transient wave propagation problems. Appl. Math. Comput. 2023, 442, 127755. [Google Scholar] [CrossRef]
- Liu, W.K.; Jun, S.; Zhang, Y.F. Reproducing kernel particle methods. Int. J. Numer. Methods Fluids 1995, 20, 1081–1106. [Google Scholar] [CrossRef]
- Atluri, S.N.; Zhu, T. A new meshless local Petrov-Galerkin (MLPG) approach in computational mechanics. Comput. Mech. 1998, 22, 117–127. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Zhang, G.Y.; Zhou, B.; Wang, H.Y.; Tang, Q. Analysis of acoustic radiation problems using the cell-based smoothed radial point interpolation method with Dirichlet-to-Neumann boundary condition. Eng. Anal. Bound. Elem. 2019, 108, 447–458. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Q.F.; Gui, Q.; Chai, Y.B. A coupled FE-Meshfree triangular element for acoustic radiation problems. Int. J. Comput. Methods. 2021, 18, 2041002. [Google Scholar] [CrossRef]
- You, X.Y.; Li, W.; Chai, Y.B. Dispersion analysis for acoustic problems using the point interpolation method. Eng. Anal. Bound. Elem. 2018, 94, 79–93. [Google Scholar] [CrossRef]
- You, X.Y.; Gui, Q.; Zhang, Q.F.; Chai, Y.B.; Li, W. Meshfree simulations of acoustic problems by a radial point interpolation method. Ocean Eng. 2020, 218, 108202. [Google Scholar] [CrossRef]
- You, X.Y.; Li, W.; Chai, Y.B.; Yu, Y. Numerical investigations of edge-based smoothed radial point interpolation method for transient wave propagations. Ocean Eng. 2022, 266, 112741. [Google Scholar] [CrossRef]
- Liu, C.; Min, S.; Pang, Y.; Chai, Y. The Meshfree Radial Point Interpolation Method (RPIM) for Wave Propagation Dynamics in Non-Homogeneous Media. Mathematics 2023, 11, 523. [Google Scholar] [CrossRef]
- De, S.; Bathe, K.J. The method of finite spheres. Comput. Mech. 2000, 25, 329–345. [Google Scholar] [CrossRef]
- De, S.; Bathe, K.J. The method of finite spheres with improved numerical integration. Comput. Struct. 2001, 79, 2183–2196. [Google Scholar] [CrossRef]
- Bathe, K.J.; Zhang, L.B. The finite element method with overlapping elements—A new paradigm for CAD driven simulations. Comput. Struct. 2017, 182, 526–539. [Google Scholar] [CrossRef]
- Zhang, L.B.; Bathe, K.J. Overlapping finite elements for a new paradigm of solution. Comput. Struct. 2017, 187, 64–76. [Google Scholar] [CrossRef]
- Zhang, L.B.; Kim, K.T.; Bathe, K.J. The new paradigm of finite element solutions with overlapping elements in CAD–Computational efficiency of the procedure. Comput. Struct. 2018, 199, 1–17. [Google Scholar] [CrossRef]
- Gui, Q.; Li, W.; Chai, Y.B. The enriched quadrilateral overlapping finite elements for time-harmonic acoustics. Appl. Math. Comput. 2023, 451, 128018. [Google Scholar] [CrossRef]
- Bathe, K.J. Finite element method. In Wiley Encyclopedia of Computer Science and Engineering; John Wiley & Sons, Inc.: New York, NY, USA, 2007; pp. 1–12. [Google Scholar]
- Xu, J.Q.; Hu, H.S.; Liu, Q.H.; Han, B.; Berenger, J.P. A high-order perfectly matched layer scheme for second-order spectral-element time-domain elastic wave modelling. J. Comput. Phys. 2023, 491, 112373. [Google Scholar] [CrossRef]
- Grote, M.J.; Keller, J.B. On nonreflecting boundary conditions. J. Comput. Phys. 1995, 122, 231–243. [Google Scholar] [CrossRef]
- Wu, S.W.; Xiang, Y. A weak-form meshfree coupled with infinite element method for predicting acoustic radiation. Eng. Anal. Bound. Elem. 2019, 107, 63–78. [Google Scholar] [CrossRef]
- Wu, S.W.; Xiang, Y.; Li, G.N. A coupled weak-form meshfree method for underwater noise prediction. Eng. Comput. 2022, 38, 5091–5109. [Google Scholar] [CrossRef]
- Merchant, N.D.; Blondel, P.; Dakin, D.T.; Dorocicz, J. Averaging underwater noise levels for environmental assessment of shipping. J. Acoust. Soc. Am. 2012, 132, EL343–EL349. [Google Scholar] [CrossRef]
- Kellett, P.; Turan, O.; Incecik, A. A study of numerical ship underwater noise prediction. Ocean Eng. 2013, 66, 113–120. [Google Scholar] [CrossRef]
- Alahmadi, H.; Afsar, H.; Nawaz, R.; Alkinidri, M.O. Scattering characteristics through multiple regions of the wave-bearing trifurcated waveguide. Waves Random Complex Media 2022, 1–17. [Google Scholar] [CrossRef]
- Nawaz, R.; Lawrie, J.B. Scattering of a fluid-structure coupled wave at a flanged junction between two flexible waveguides. J. Acoust. Soc. Am. 2013, 134, 1939–1949. [Google Scholar] [CrossRef]
- Nawaz, R.; Yaseen, A.; Alkinidri, M.O. Fluid–structure coupled response of dynamical surfaces tailored in a flexible shell. Math. Mech. Solids 2023. [Google Scholar] [CrossRef]
- Tezaur, R.; Macedo, A.; Farhat, C.; Djellouli, R. Three-dimensional finite element calculations in acoustic scattering using arbitrarily shaped convex artificial boundaries. Int. J. Numer. Methods Eng. 2002, 53, 1461–1476. [Google Scholar] [CrossRef]
- Harari, I.; Slavutin, M.; Turkel, E. Analytical and numerical studies of a finite element PML for the Helmholtz equation. J. Comput. Acoust. 2000, 8, 121–137. [Google Scholar] [CrossRef]
- Keller, J.B.; Givoli, D. Exact non-reflecting boundary conditions. J. Comput. Phys. 1989, 82, 172–192. [Google Scholar] [CrossRef]
- Li, E.; He, Z.C. Optimal balance between mass and smoothed stiffness in simulation of acoustic problems. Appl. Math. Model. 2019, 75, 1–22. [Google Scholar] [CrossRef]
- Wu, S.W.; Xiang, Y.; Li, W.Y. A hybrid smoothed moving least-squares interpolation method for acoustic scattering problems. Eng. Comput. 2023, 1–19. [Google Scholar] [CrossRef]
- Gui, Q.; Zhang, G.Y.; Chai, Y.B.; Li, W. A finite element method with cover functions for underwater acoustic propagation problems. Ocean Eng. 2022, 243, 110174. [Google Scholar] [CrossRef]
- Babuska, I.; Szabo, B.A.; Katz, I.N. The p-version of the finite element method. SIAM J. Numer. Anal. 1981, 18, 515–545. [Google Scholar] [CrossRef]
- Liu, W.K.; Li, S.; Park, H.S. Eighty Years of the Finite Element Method: Birth, Evolution, and Future. Arch. Comput. Method Eng. 2022, 29, 4431–4453. [Google Scholar] [CrossRef]
- Gui, Q.; Zhou, Y.; Li, W.; Chai, Y.B. Analysis of two-dimensional acoustic radiation problems using the finite element with cover functions. Appl. Acoust. 2022, 185, 108408. [Google Scholar] [CrossRef]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, B.; Yu, J.; Li, W.; Chai, Y.; Gui, Q. A Coupled Overlapping Finite Element Method for Analyzing Underwater Acoustic Scattering Problems. J. Mar. Sci. Eng. 2023, 11, 1676. https://doi.org/10.3390/jmse11091676
Jiang B, Yu J, Li W, Chai Y, Gui Q. A Coupled Overlapping Finite Element Method for Analyzing Underwater Acoustic Scattering Problems. Journal of Marine Science and Engineering. 2023; 11(9):1676. https://doi.org/10.3390/jmse11091676
Chicago/Turabian StyleJiang, Bin, Jian Yu, Wei Li, Yingbin Chai, and Qiang Gui. 2023. "A Coupled Overlapping Finite Element Method for Analyzing Underwater Acoustic Scattering Problems" Journal of Marine Science and Engineering 11, no. 9: 1676. https://doi.org/10.3390/jmse11091676