
Fishing Behavior Detection and Analysis of Squid Fishing Vessel Based on Multiscale Trajectory Characteristics
 , and
, and 
Abstract
:1. Introduction
2. Multiscale Trajectory Characteristics of Squid Fishing Vessels
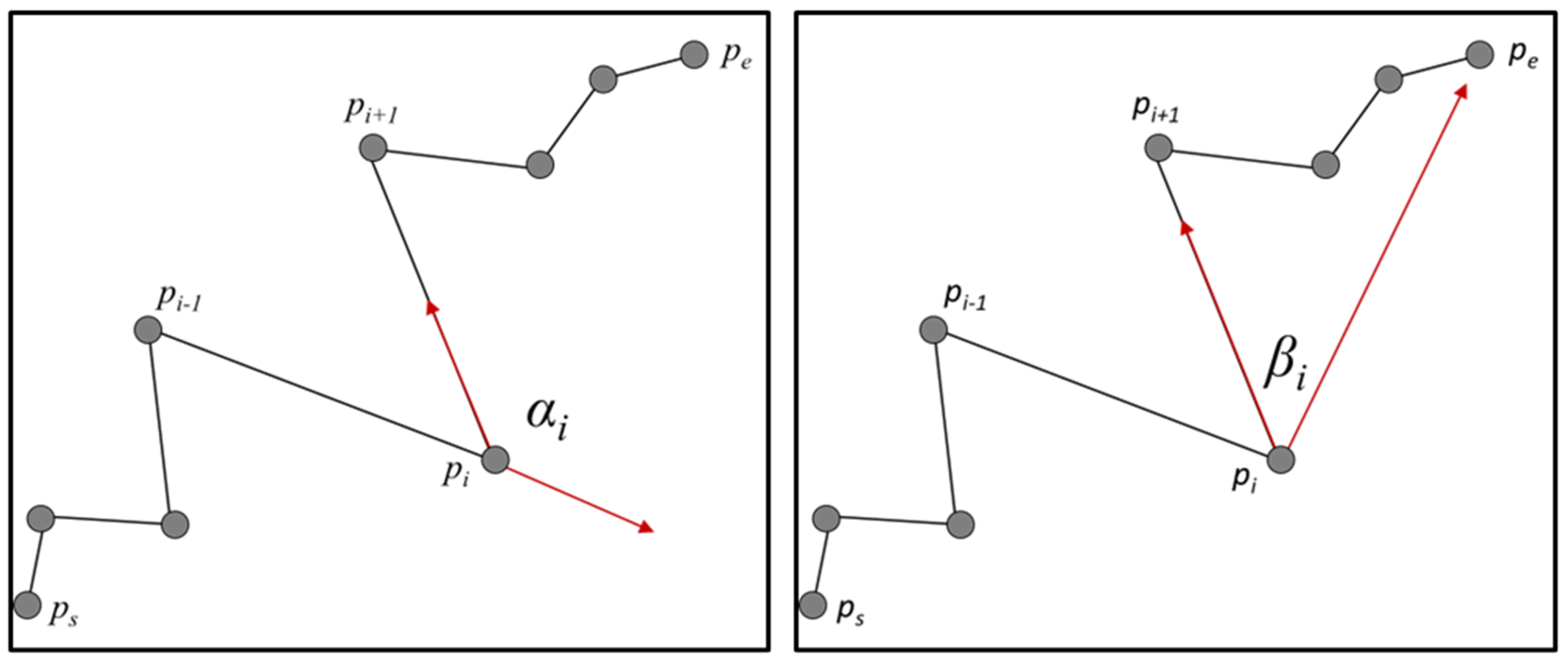
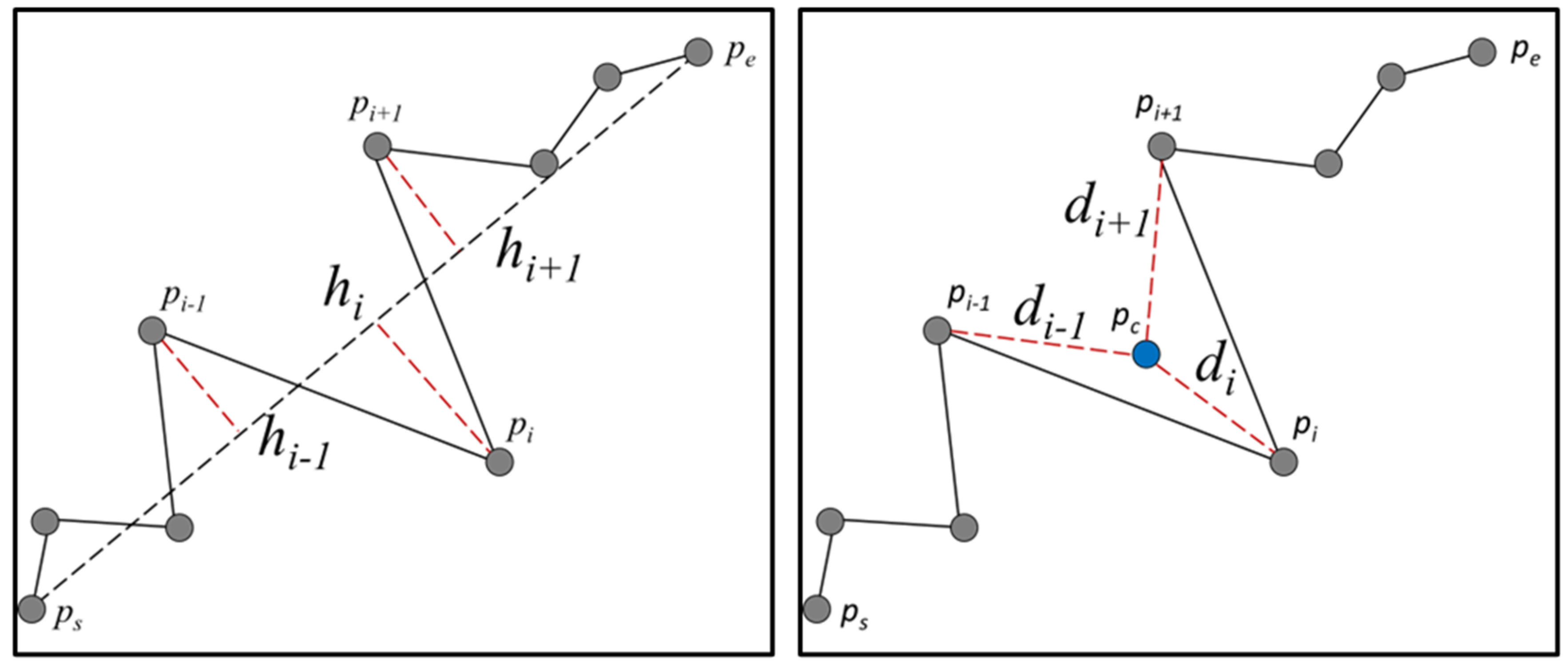
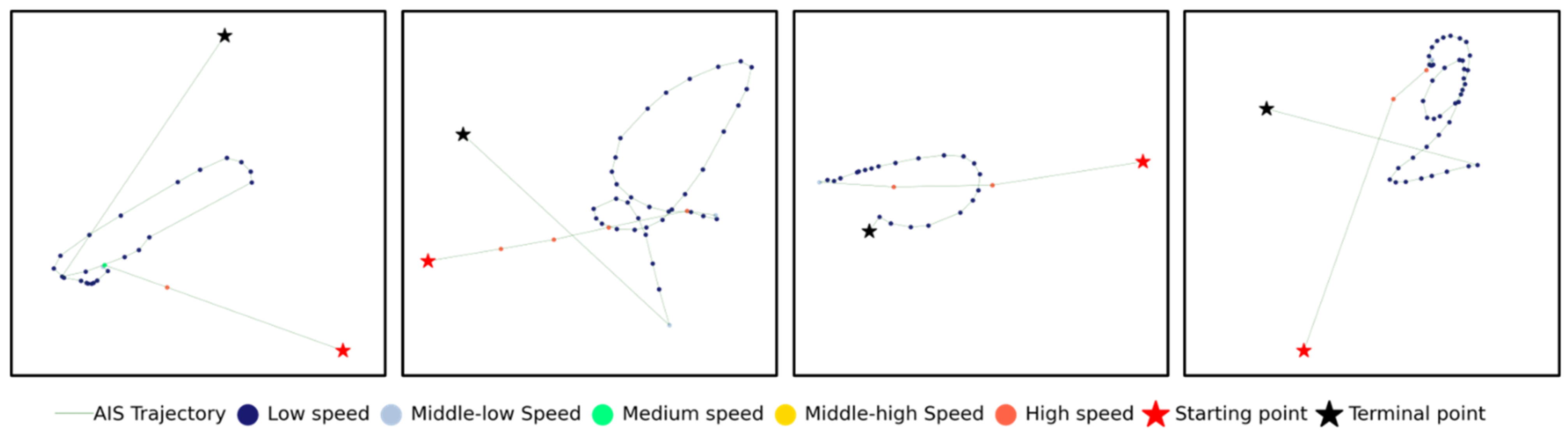
2.1. Local Dynamic Parameters of Squid Fishing Vessel
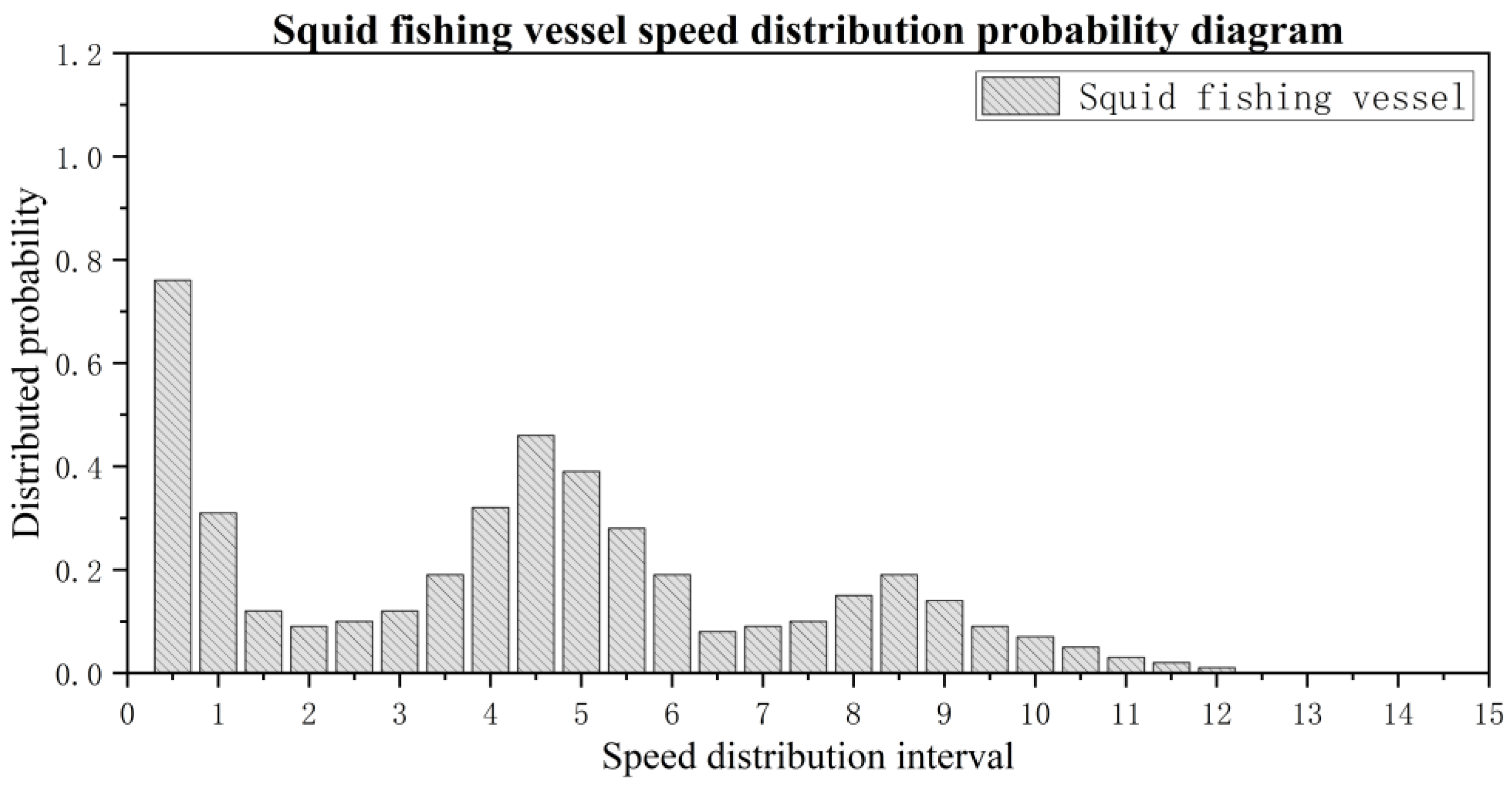
2.2. Global Statistical Characteristics of Squid Fishing Vessel
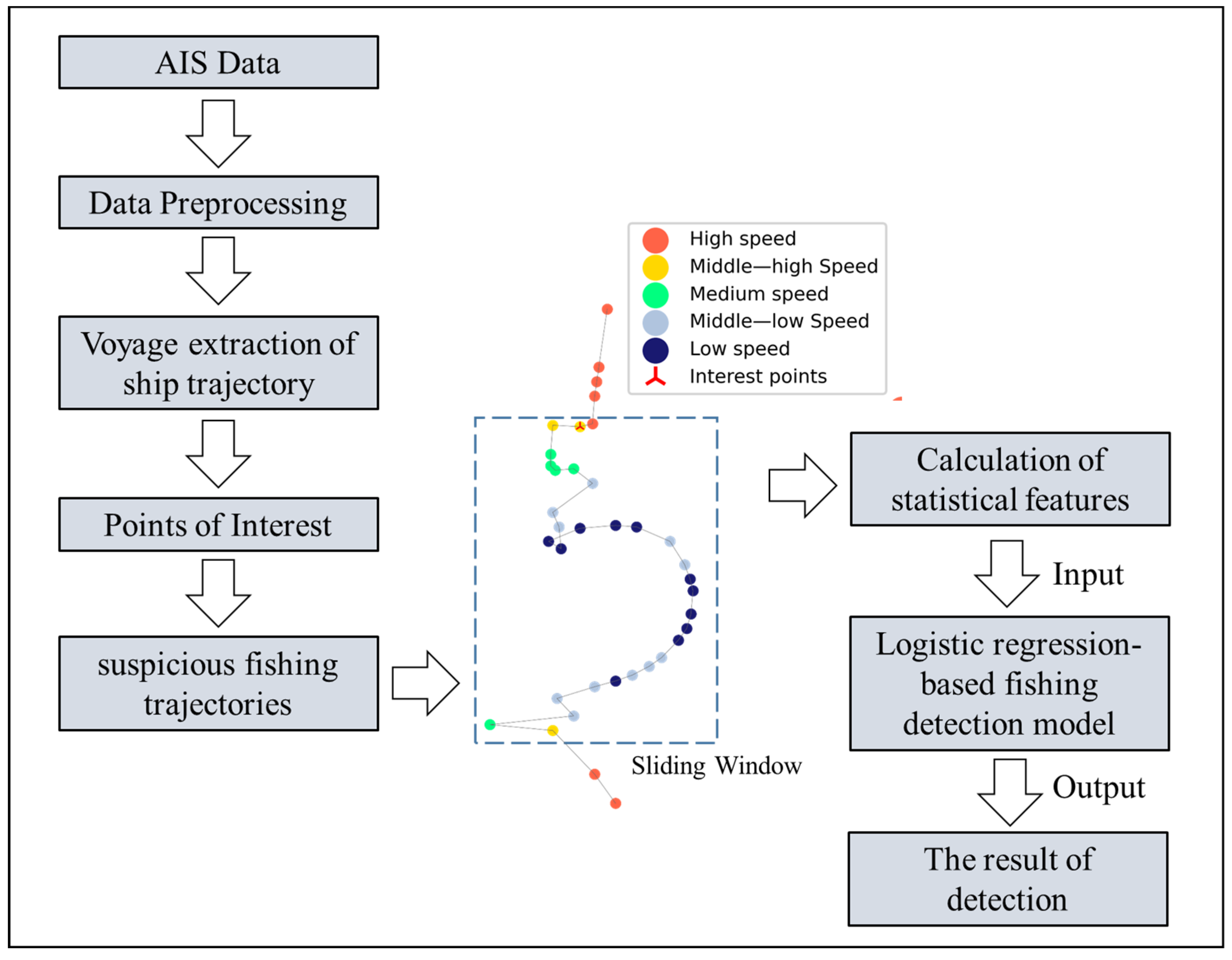
3. Detection Method of Fishing Behavior Based on Trajectory Characteristics
- Input the AIS trajectory of fishing vessels, and the trajectory is preprocessed.
- Use a density-based clustering iterative approach to extract the center point coordinates of fishing ports. Based on this, the single voyage trajectory is divided.
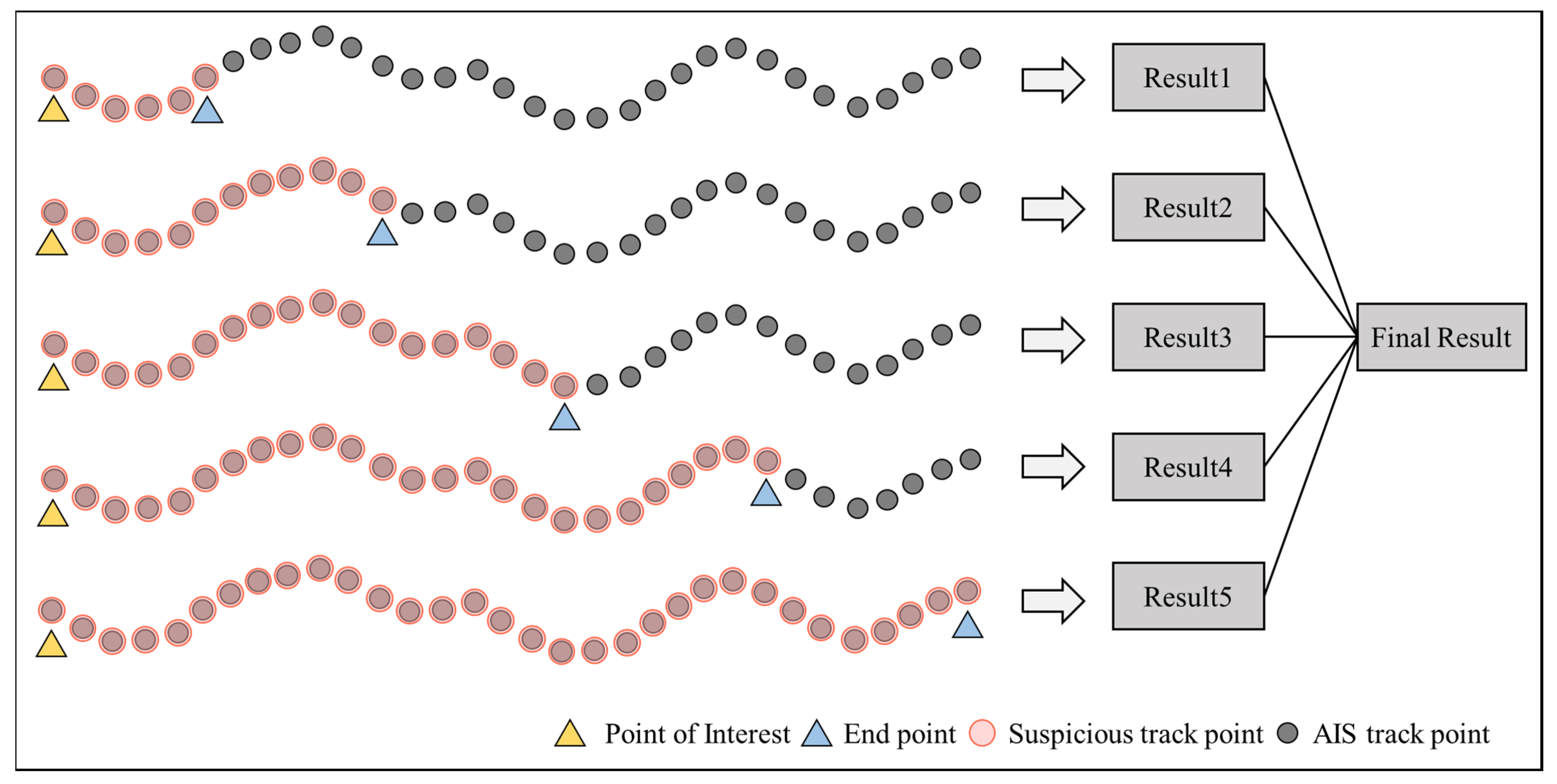
- Traverse every voyage’s trajectory. If there are POI that change from high speed to low speed, take all POI as the starting point of the sliding window.
- Starting from each POI, the minimum time length of the sliding window is determined by the shortest fishing time and the minimum number of track points. The sliding window is extended every half hour, and the trajectory within the window will be considered a suspicious fishing trajectory.
- Extract six global statistical characteristics defined in this paper from the suspicious fishing trajectories, including proportion of low-velocity, proportion of course-fluctuation, direction constancy, cohesion, sinuosity, straightness, and navigation efficiency.
- Use the logistic regression model trained by the training samples to distinguish whether the suspicious fishing trajectory is a fishing trajectory. Select the trajectory with the highest probability as the final fishing trajectory.
3.1. Voyage Trajectory Extraction
3.2. Suspicious Fishing Trajectory Extraction Based on Variable Length Sliding Window
3.3. Fishing Trajectory Determination Model Based on Logistic Regression
3.4. Fishing Effort Estimation Method
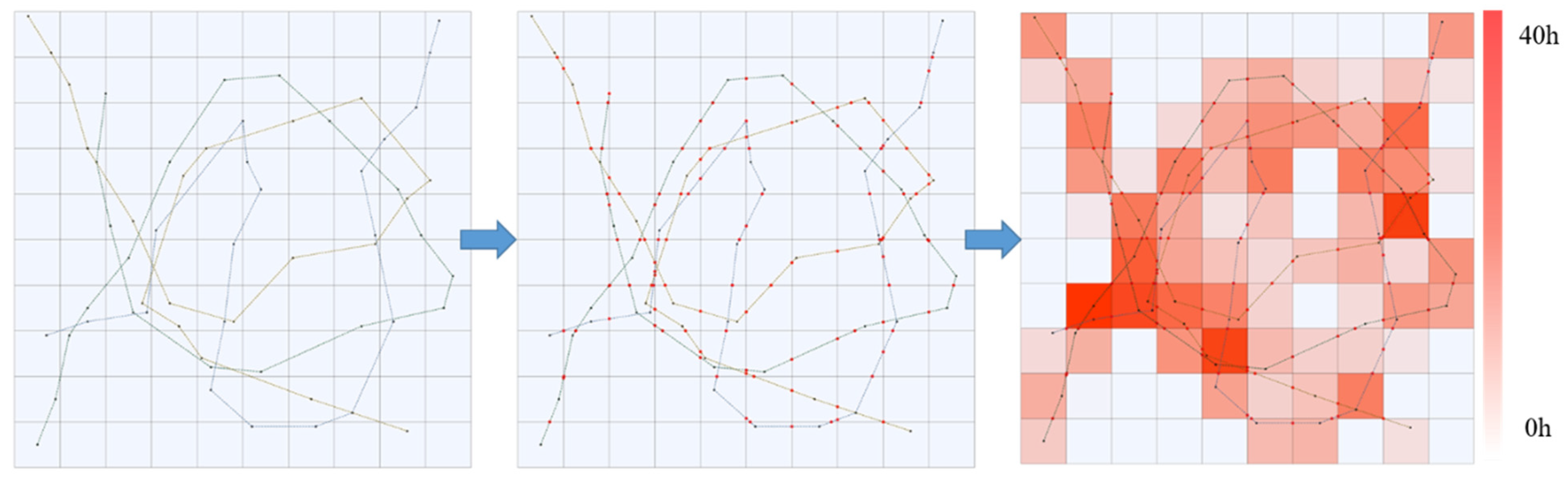
- Division of spatial grids: Divide the research sea area into a series of closely arranged spatial grids, with a spatial size of 5000 m × 5000 m for each grid set in this article;
- Grid based fishing trajectory segmentation: As shown in Figure 10, black dots represent the track points of the AIS fishing trajectory, and red dots represent the intersection point of the fishing trajectory and the spatial grid. By segmenting the fishing trajectory through the intersection point between the spatial grid and the fishing trajectory, a set of fishing trajectories for different fishing vessels within each spatial grid is obtained, denoted as .
- 3.
- Calculate fishing effort: calculate the total number of fishing attempts or fishing duration of all fishing trajectories in each spatial grid and evaluate the fishing intensity in each spatial grid. The calculation method is as follows:
4. Experiment and Result Analysis
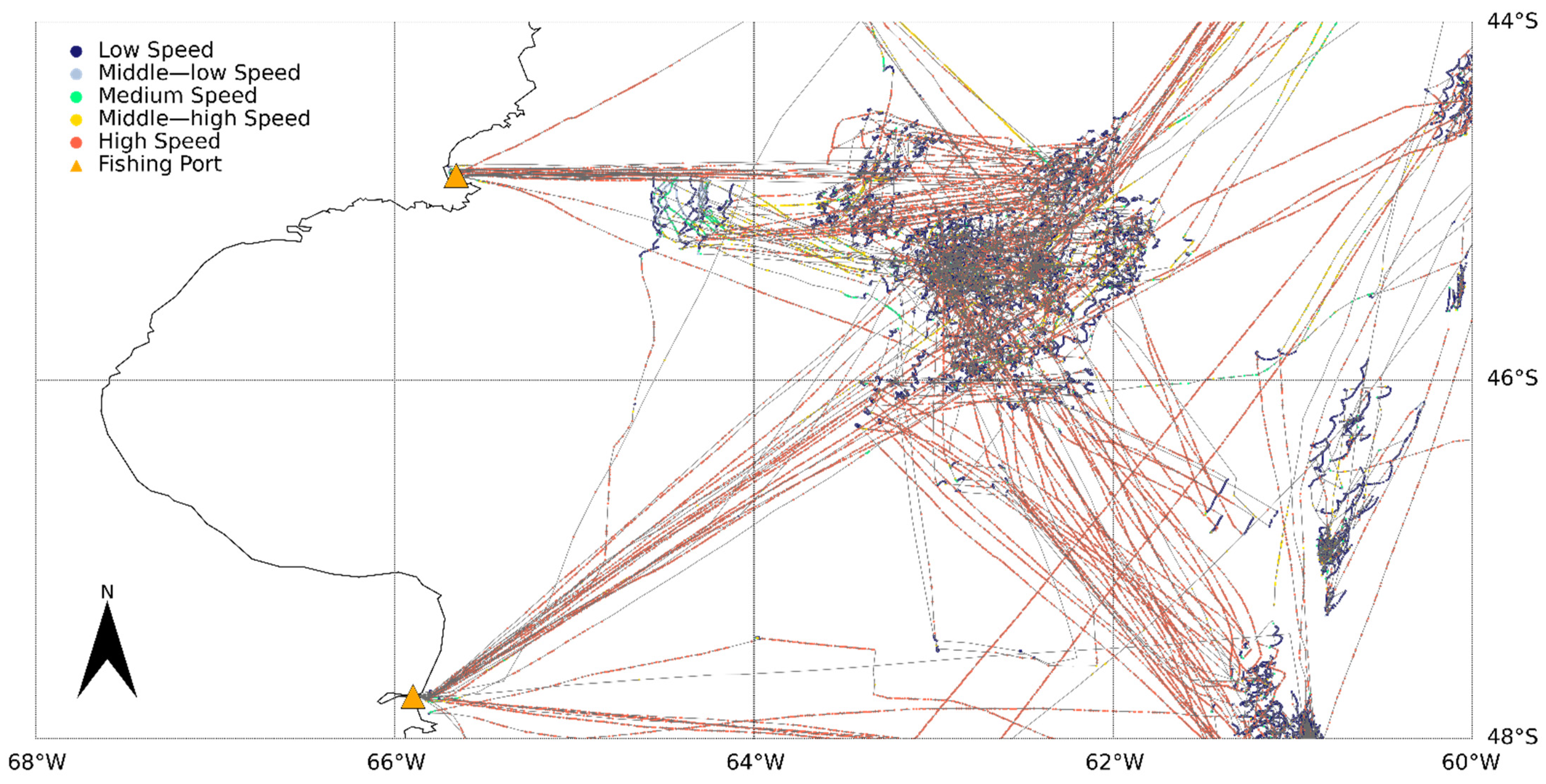
4.1. Experimental Area and Data
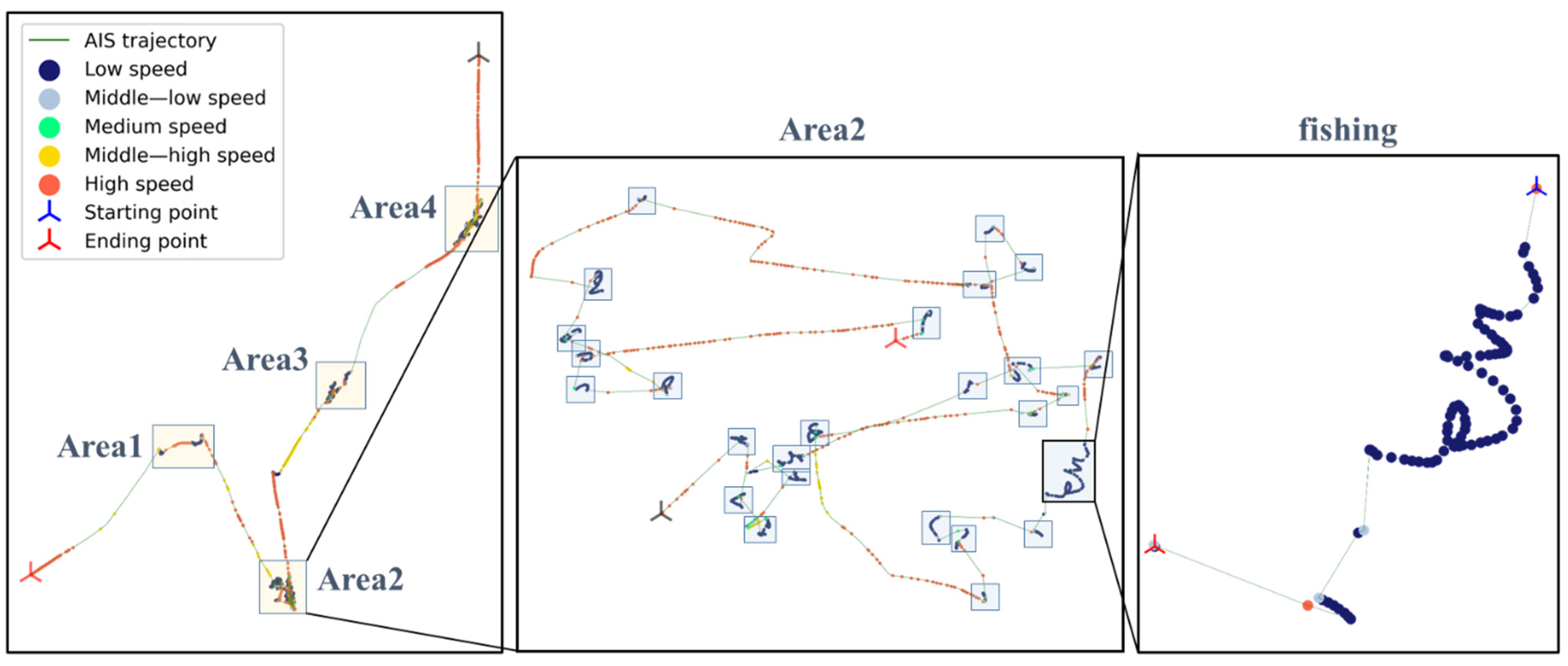
- Visualize the voyage trajectories of fishing vessels and extract the main fishing areas.
- Extracting fishing trajectory samples from fishing areas by combining the cast net time recorded in fishing vessel logs with expert knowledge.
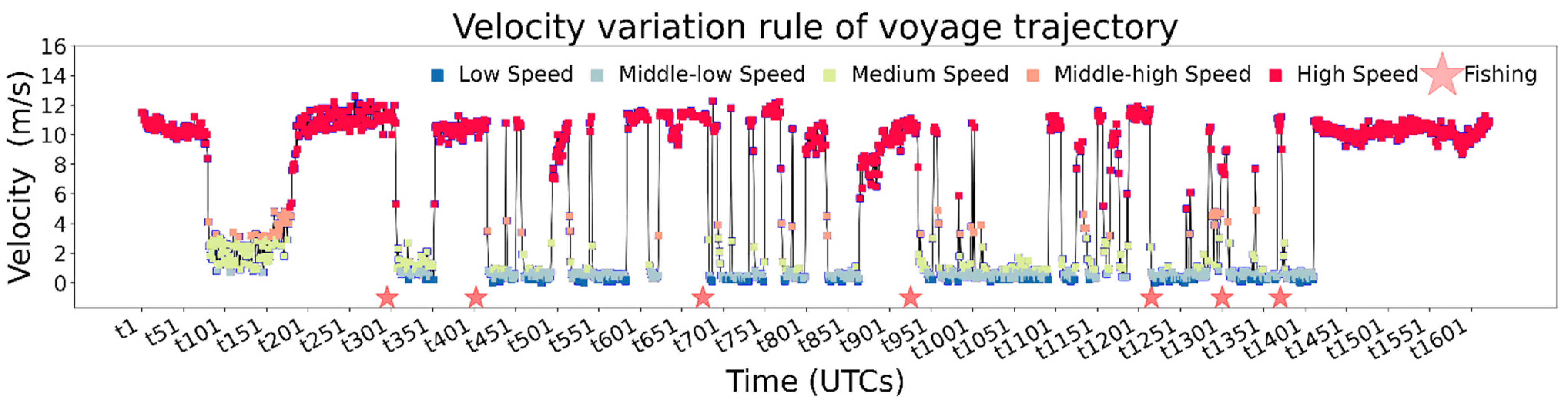
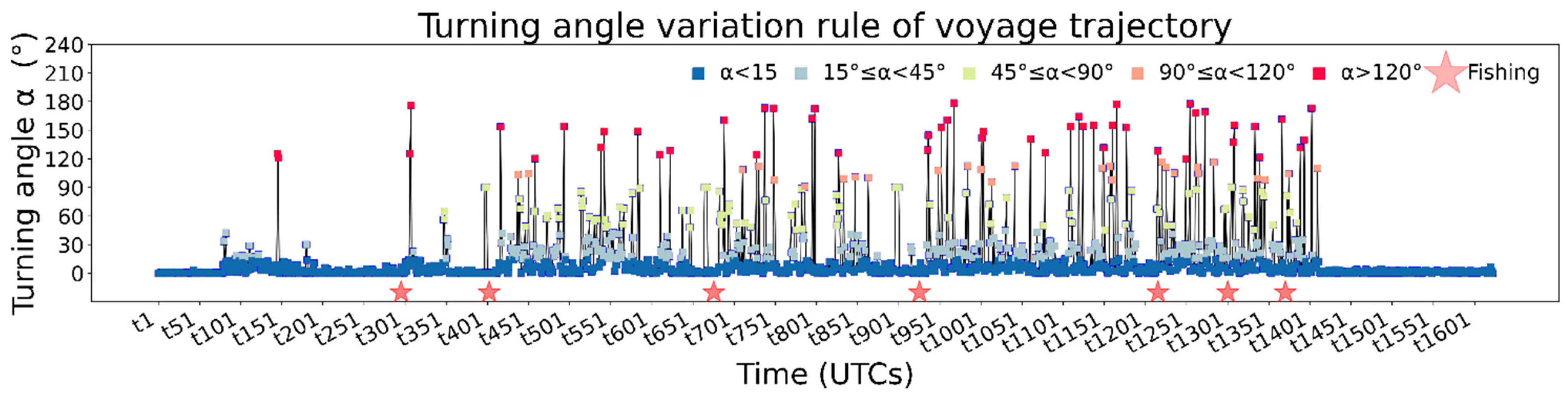
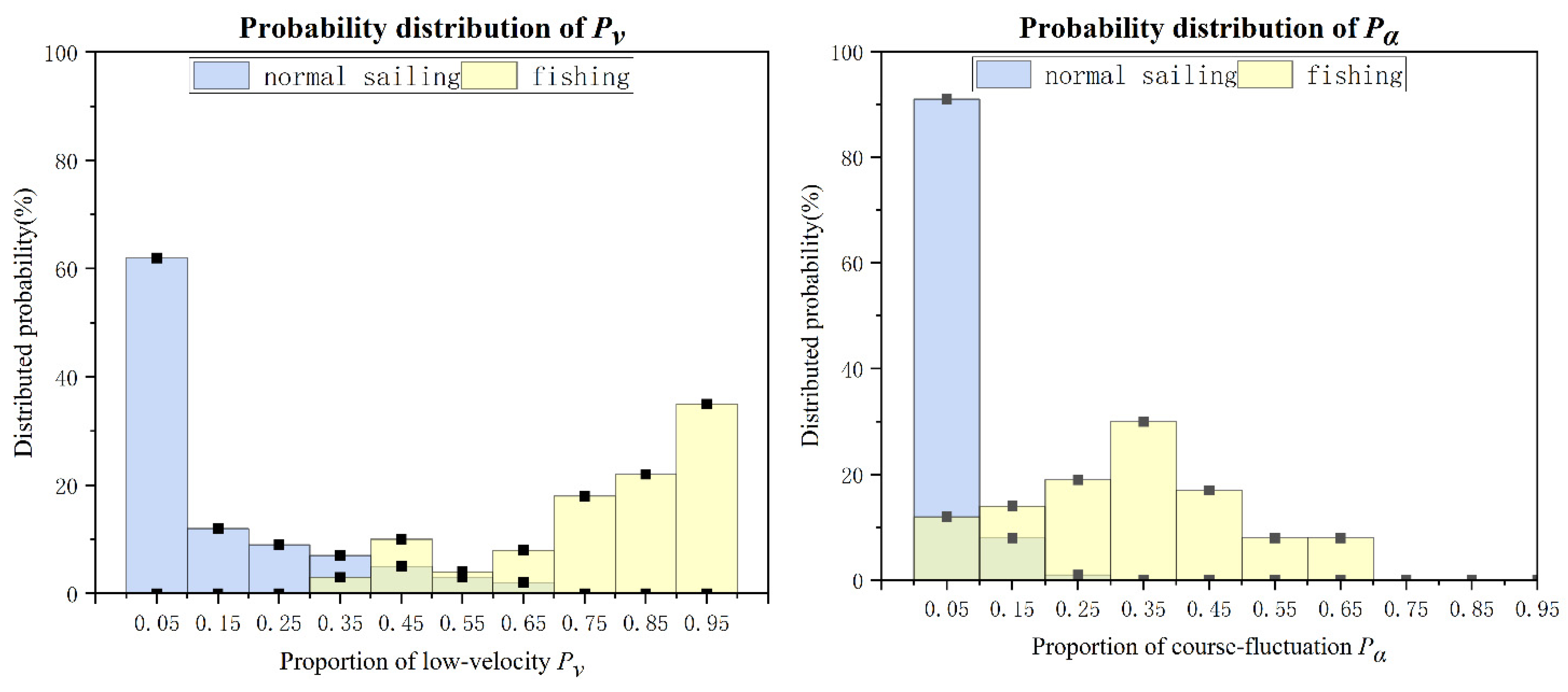
- As shown in Figure 14, the statistical results indicate that the fishing behavior of fishing vessels does maintain lower speeds and generate more frequent turns compared to normal sailing behavior. At the same time, it is explained that the and defined from the perspective of motion can effectively distinguish between fishing trajectories and normal sailing trajectories.
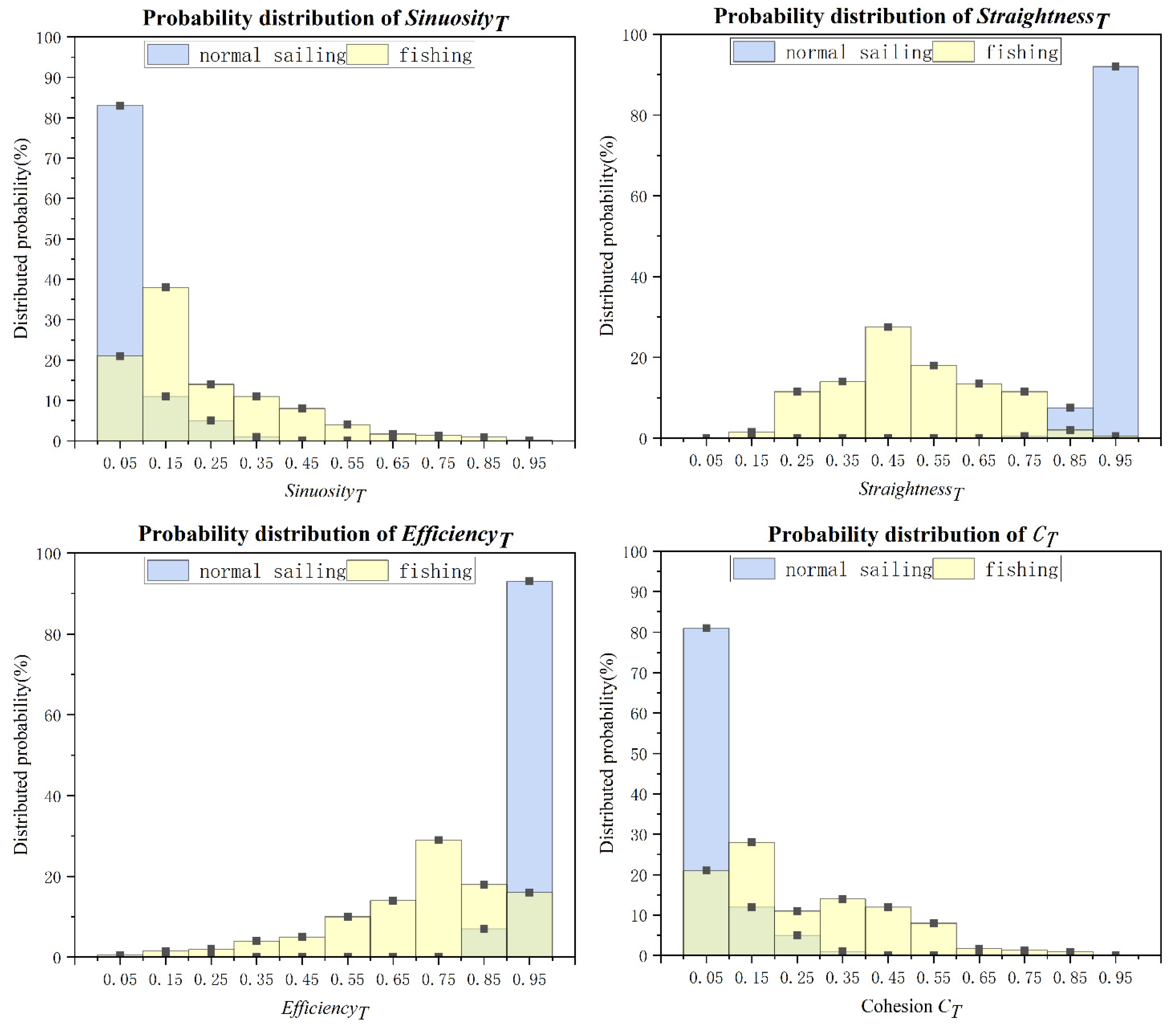
- As shown in Figure 15, the statistical results indicate that the four statistical characteristics , , , and defined from the perspective of trajectory morphology can also distinguish fishing trajectories from normal sailing trajectories from different aspects.
4.2. Method Evaluation
- If the fishing logbook records the fishing start moment as utcf, set the time interval as [utcf − tε, utcf + tε].
- Extract the AIS trajectory of the fishing vessel in this time interval.
- Judge whether the trajectory has experienced a change in speed interval (from a high-speed portion to a low-speed section).
- Calculate the proportion of the fishing log records that satisfy the condition to the total number of fishing log reports, Ppoi.
- In experiment 1, 75% of the data sets were used to test the logistic regression model, and 25% of the data sets were randomly chosen to train the model’s parameters.
- In experiment 2, a point-by-point detection model based on speed threshold was adopted. The sample object was transformed into track points, so 2000 trajectory datasets were further decomposed to obtain 194,356 fishing track point samples and 177,364 normal sailing track points. This article randomly selects 5000 fishing track point samples and 5000 normal sailing track point samples as the test dataset for Experiment 2 and set the speed threshold at 4 m/s.
- (1)
- The accuracy of the test data set in Experiment 1 was 78.83%, the precision was 80.72%, the recall rate was 77.78%, the specificity was 79.96%, the Kappa coefficient was 0.5766, and the f1-Score was 0.7922.
- (2)
- The accuracy of the test data set in Experiment 2 was 99.20%, the precision was 98.93%, the recall rate was 99.46%, the specificity was 98.94%, the Kappa coefficient was 0.9840, and the f1-Score was 0.9920.
4.3. Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lira, A.S.; Lucena-Frédou, F.; Lacerda, C.H.F.; Eduardo, L.N.; Ferreira, V.; Frédou, T.; Ménard, F.; Angelini, R.; Le Loc'h, F. Effect of fishing effort on the trophic functioning of tropical estuaries in Brazil. Estuar. Coast. Shelf Sci. 2022, 277, 108040. [Google Scholar] [CrossRef]
- Schartup, A.T.; Thackray, C.P.; Qureshi, A.; Dassuncao, C.; Gillespie, K.; Hanke, A.; Sunderland, E.M. Climate change and overfishing increase neurotoxicant in marine predators. Nature 2019, 572, 648–650. [Google Scholar] [CrossRef] [PubMed]
- Agnew, D.J.; Pearce, J.; Pramod, G.; Peatman, T.; Watson, R.; Beddington, J.R.; Pitcher, T.J. Estimating the worldwide extent of illegal fishing. PLoS ONE 2009, 4, e4570. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Syversen, T.; Lilleng, G.; Vollstad, J.; Hanssen, B.J.; Sonvisen, S.A. Oceanic plastic pollution caused by Danish seine fishing in Norway. Mar. Pollut. Bull. 2022, 179, 113711. [Google Scholar] [CrossRef]
- Vince, J.; Hardesty, B.D.; Wilcox, C. Progress and challenges in eliminating illegal fishing. Fish. Res. 2021, 22, 518–531. [Google Scholar] [CrossRef]
- Fabinyi, M.J.G. Maritime disputes and seafood regimes: A broader perspective on fishing and the Philippines–China relationship. Globalizations 2020, 17, 146–160. [Google Scholar] [CrossRef]
- Shih, Y.-C.; Chang, Y.-C.; Gullett, W.; Chiau, W.-Y. Challenges and opportunities for fishery rights negotiations in disputed waters–A Taiwanese perspective regarding a fishing boat case incident. Mar. Policy 2020, 121, 103755. [Google Scholar] [CrossRef]
- Mangi, S.C.; Kenny, A.; Readdy, L.; Posen, P.; Ribeiro-Santos, A.; Neat, F.C.; Burns, F. The economic implications of changing regulations for deep sea fishing under the European Common Fisheries Policy: UK case study. Sci. Total Environ. 2016, 562, 260–269. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Li, Q.; Wang, C.; Wu, Q.; Peng, C.; Jefferson, T.A.; Long, Z.; Luo, F.; Xu, Y.; Huang, S.-L. Bycatch mitigation requires livelihood solutions, not just fishing bans: A case study of the trammel-net fishery in the northern Beibu Gulf, China. Mar. Policy 2022, 139, 105018. [Google Scholar] [CrossRef]
- Ji, J.; Li, Y. The development of China's fishery informatization and its impact on fishery economic efficiency. Mar. Policy 2021, 133, 104711. [Google Scholar] [CrossRef]
- Zhou, S.; Smith, A.D.; Knudsen, E.E. Ending overfishing while catching more fish. Fish Fish. 2015, 16, 716–722. [Google Scholar] [CrossRef]
- Solarin, S.A.; Gil-Alana, L.A.; Lafuente, C. Persistence and sustainability of fishing grounds footprint: Evidence from 89 countries. Sci. Total Environ. 2021, 751, 141594. [Google Scholar] [CrossRef]
- Feng, B.; Li, Z.; Lu, H.; Yan, Y.; Hou, G. Estimating the total allowable catch and management of Threadfin porgy (Evynnis cardinalis) fisheries in the northern South China Sea based on sampling surveys conducted at fishing ports. Aquaculture 2022. Advance online publication. [Google Scholar] [CrossRef]
- Venerus, L.A.; Parma, A.M. An access-point survey approach to estimate recreational boat-fishing effort for stays of variable length. Fish. Res. 2022, 254, 106429. [Google Scholar] [CrossRef]
- Constantino, M.M.; Cubas, A.L.V.; Silvy, G.; Magogada, F.; Moecke, E.H.S. Impacts of illegal fishing in the inland waters of the State of Santa Catarina–Brazil. Mar. Pollut. Bull. 2022, 180, 113746. [Google Scholar] [CrossRef]
- Quimbayo, J.P.; Silva, F.C.; Barreto, C.R.; Pavone, C.B.; Lefcheck, J.S.; Leite, K.; Figueiroa, A.C.; Correia, E.C.; Flores, A.A.V. The COVID-19 pandemic has altered illegal fishing activities inside and outside a marine protected area. Curr. Biol. 2022, 32, R765–R766. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, C.V.; Paes, A.; de Oliveira, D. AIS-based maritime anomaly traffic detection: A review. Expert Syst. Appl. 2023. Advance online publication. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, D.; Fan, W.; Zhang, M. On fishing grounds distribution of tuna longline based on satellite automatic identification system in the Western and Central Pacific. Mar. Fish. 2018, 40, 649–659. [Google Scholar]
- Yan, Z.; He, R.; Ruan, X.; Yang, H. Footprints of fishing vessels in Chinese waters based on automatic identification system data. J. Sea Res. 2022, 187, 102255. [Google Scholar] [CrossRef]
- Ferrà, C.; Tassetti, A.N.; Grati, F.; Pellini, G.; Polidori, P.; Scarcella, G.; Fabi, G. Mapping change in bottom trawling activity in the Mediterranean Sea through AIS data. Mar. Policy 2018, 94, 275–281. [Google Scholar] [CrossRef]
- Natale, F.; Gibin, M.; Alessandrini, A.; Vespe, M.; Paulrud, A. Mapping fishing effort through AIS data. PLoS ONE 2015, 10, e0130746. [Google Scholar] [CrossRef] [Green Version]
- Kroodsma, D.A.; Mayorga, J.; Hochberg, T.; Miller, N.A.; Boerder, K.; Ferretti, F.; Wilson, A.; Bergman, B.; White, T.D.; Block, B.A. Tracking the global footprint of fisheries. Science 2018, 359, 904–908. [Google Scholar] [CrossRef] [Green Version]
- Masroeri, A.; Aisjah, A.S.; Jamali, M.M. IUU fishing and transhipment identification with the miss of AIS data using Neural Networks. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021; p. 012054. [Google Scholar]
- Zhang, C.; Chen, Y.; Xu, B.; Xue, Y.; Ren, Y. The dynamics of the fishing fleet in China Seas: A glimpse through AIS monitoring. Sci. Total Environ. 2022, 819, 153150. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.-l.; Zhang, S.-m.; Zhang, H.; Fei, Y.-j.; Jin, W.-g.; Wang, G.-l.; Fan, W. Pelagic fishing vessel classification using Bidirectional long short-term memory networks. Mar. Sci. 2022, 46, 25–35. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, L.; Lu, W.; Wen, J.; Cui, J. A detection and restoration approach for vessel trajectory anomalies based on AIS. J. Northwestern Polytech. Univ. 2021, 39, 119–125. (In Chinese) [Google Scholar] [CrossRef]
- Liu, C.; Liu, J.; Zhou, X.; Zhao, Z.; Wan, C.; Liu, Z. AIS data-driven approach to estimate navigable capacity of busy waterways focusing on ships entering and leaving port. Ocean Eng. 2020, 218, 108215. [Google Scholar] [CrossRef]
- Vermard, Y.; Rivot, E.; Mahévas, S.; Marchal, P.; Gascuel, D. Identifying fishing trip behaviour and estimating fishing effort from VMS data using Bayesian Hidden Markov Models. Ecol. Model. 2010, 221, 1757–1769. [Google Scholar] [CrossRef] [Green Version]
- Fajardo, T. To criminalise or not to criminalise IUU fishing: The EU’s choice. Mar. Policy 2022, 144, 105212. [Google Scholar] [CrossRef]
- Zhu, X.; Tang, J. The interplay between soft law and hard law and its implications for global marine fisheries governance: A case study of IUU fishing. Aquac. Fish. 2023; Advance online publication. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Dynamic Data | Static Data | Note |
|---|---|---|---|
| AIS | Latitude, longitude, speed (knots), course (degree) | mmsi, ship name, call Sign, IMO, ship length (m), ship width (m) | The AIS data in this paper is parsed to include the reporting time (utc) information. |
| Fishing vessel logbook | Operation status, start time (utc), latitude of start point, longitude of start point, fish catch (Kg), reporting time (utc) | log_type, ship name | Operation status: fishing, nomal sailing. |
| Vessel file list | Null | project name, project type, ship name, mmsi, gear type | Project type: high seas project, transoceanic project. |
| World Port Index | Null | Index_no, Region_no, Port name, Country, Latitude, Longitude, Harbor size, etc. | With a wealth of geographical information and attributes of each port, this table does not enumerate too much. |
| Port Name | LON | LAT |
|---|---|---|
| MAR DEL PLATA | −57.516008 | −38.022194 |
| LA PLATA | −57.890093 | −34.822192 |
| PUERTO DESEADO | −65.898126 | −47.765125 |
| PUERTO MADRYN | −65.027862 | −42.738157 |
| Not Matched | −65.658333 | −44.860000 |
| tε | Ppoi |
|---|---|
| 0.1 h | 66.3% |
| 0.2 h | 81.8% |
| 0.5 h | 88.4% |
| 1 h | 97.5% |
| 1.5 h | 100% |
| 2 h | 100% |
| Experiments | Real Type Label | Predict Classification Results | |
|---|---|---|---|
| Fishing | Normal Sailing | ||
| Experiment 1 | Fishing | 4036 | 964 |
| Normal sailing | 1153 | 3847 | |
| Experiment 2 | Fishing | 1484 | 16 |
| Normal sailing | 8 | 1492 | |
| MMSI | Number of Sea Trips | Total Mileage Sailed | Total Fishing Mileage | Number of Fishing Trips | Total Sailing Time | Total Fishing Time |
|---|---|---|---|---|---|---|
| 701 ** 3000 | 10 | 16,994 | 3990 | 51 | 3588 | 1544 |
| 701 ** 6788 | 18 | 20,296 | 3599 | 49 | 4294 | 1248 |
| 701 ** 6615 | 7 | 16,688 | 5219 | 60 | 3761 | 1851 |
| 701 ** 6609 | 7 | 13,928 | 1279 | 57 | 3246 | 450 |
| 701 ** 6614 | 15 | 16,905 | 5757 | 110 | 4197 | 2141 |
| 701 ** 6000 | 12 | 18,759 | 5366 | 140 | 3814 | 1887 |
| 701 ** 4000 | 8 | 15,908 | 4179 | 41 | 3036 | 1347 |
| 701 ** 6568 | 10 | 15,928 | 4591 | 98 | 3817 | 1390 |
| 701 ** 0674 | 6 | 10,150 | 3564 | 176 | 2405 | 996 |
| 701 ** 5000 | 11 | 17,373 | 5231 | 65 | 3714 | 1954 |
| 701 ** 6725 | 14 | 18,004 | 4057 | 72 | 3842 | 1783 |
| 412 ** 0688 | 1 | 55,127 | 0 | 0 | 8783 | 0 |
| MMSI | January | February | March | April | May | June | July | August | September | October | November | December |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 701 ** 3000 | 10 | 8 | 10 | 6 | 6 | 7 | 4 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 6788 | 7 | 1 | 1 | 8 | 13 | 8 | 10 | 1 | 0 | 0 | 0 | 0 |
| 701 ** 6615 | 9 | 7 | 8 | 9 | 18 | 6 | 3 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 6609 | 9 | 2 | 0 | 46 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 6614 | 26 | 36 | 6 | 6 | 11 | 7 | 17 | 1 | 0 | 0 | 0 | 0 |
| 701 ** 6000 | 14 | 18 | 18 | 22 | 45 | 16 | 7 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 4000 | 9 | 10 | 8 | 4 | 9 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 6568 | 7 | 6 | 4 | 20 | 41 | 11 | 2 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 0674 | 39 | 52 | 60 | 0 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 5000 | 13 | 7 | 9 | 6 | 16 | 6 | 6 | 0 | 0 | 0 | 0 | 0 |
| 701 ** 6725 | 4 | 6 | 5 | 15 | 13 | 9 | 13 | 7 | 0 | 0 | 0 | 0 |
| 412 ** 0688 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Voyages | Departing Port | Arriving Port | Departing Time | Arriving Time | Number of Fishing Trips |
|---|---|---|---|---|---|
| Track1 | LA PLATA | MAR DEL PLATA | 2020-01-08 19:37:21 | 2020-01-09 16:21:32 | 0 |
| Track2 | MAR DEL PLATA | MAR DEL PLATA | 2020-01-09 18:00:51 | 2020-01-14 21:30:36 | 1 |
| Track3 | Not Matched | MAR DEL PLATA | 2020-01-16 05:09:23 | 2020-02-10 03:22:56 | 11 |
| Track4 | MAR DEL PLATA | MAR DEL PLATA | 2020-02-13 12:46:26 | 2020-03-26 04:28:17 | 14 |
| Track5 | PUERTO DESEADO | MAR DEL PLATA | 2020-03-28 23:59:51 | 2020-04-16 01:38:58 | 6 |
| Track6 | MAR DEL PLATA | MAR DEL PLATA | 2020-04-21 01:14:56 | 2020-04-29 02:29:29 | 2 |
| Track7 | MAR DEL PLATA | MAR DEL PLATA | 2020-04-30 10:04:37 | 2020-05-19 22:45:36 | 6 |
| Track8 | MAR DEL PLATA | MAR DEL PLATA | 2020-06-05 05:33:07 | 2020-07-04 16:46:26 | 10 |
| Track9 | MAR DEL PLATA | MAR DEL PLATA | 2020-07-04 18:11:47 | 2020-07-05 14:56:48 | 1 |
| Track10 | MAR DEL PLATA | MAR DEL PLATA | 2020-07-30 22:20:01 | 2020-07-31 21:02:03 | 0 |
| Voyages | Fishing Trajectories | Lon_Start | Lat_Start | Start Time | Stop Time |
|---|---|---|---|---|---|
| Track 8 | Fishing1 | −64.235245 | −44.869124 | 2020-06-11 23:37:05 | 2020-06-12 06:02:54 |
| Track 8 | Fishing2 | −63.612587 | −44.987512 | 2020-06-14 21:08:31 | 2020-06-15 05:40:16 |
| Track 8 | Fishing3 | −63.605215 | −45.003654 | 2020-06-15 22:09:35 | 2020-06-16 07:12:07 |
| Track 8 | Fishing4 | −62.358074 | −44.654007 | 2020-06-18 23:24:58 | 2020-06-19 06:45:51 |
| Track 8 | Fishing5 | −62.312457 | −45.215800 | 2020-06-21 23:55:04 | 2020-06-22 09:00:54 |
| Track 8 | Fishing6 | −62.680040 | −44.760542 | 2020-06-24 00:23:12 | 2020-06-24 07:14:06 |
| Track 8 | Fishing7 | −62.002415 | −45.752023 | 2020-06-24 22:42:27 | 2020-06-25 04:59:42 |
| Track 8 | Fishing8 | −62.841567 | −45.741200 | 2020-06-25 23:37:11 | 2020-06-26 08:04:31 |
| Track 8 | Fishing9 | −63.001400 | −45.023350 | 2020-06-27 20:57:08 | 2020-06-28 08:10:44 |
| Track 8 | Fishing10 | −64.254100 | −45.214740 | 2020-06-29 22:45:34 | 2020-06-30 06:56:21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Yuan, B.; Huang, L.; Wen, Y.; Yang, X.; Song, R.; van Gelder, P. Fishing Behavior Detection and Analysis of Squid Fishing Vessel Based on Multiscale Trajectory Characteristics. J. Mar. Sci. Eng. 2023, 11, 1245. https://doi.org/10.3390/jmse11061245
Zhang F, Yuan B, Huang L, Wen Y, Yang X, Song R, van Gelder P. Fishing Behavior Detection and Analysis of Squid Fishing Vessel Based on Multiscale Trajectory Characteristics. Journal of Marine Science and Engineering. 2023; 11(6):1245. https://doi.org/10.3390/jmse11061245
Chicago/Turabian StyleZhang, Fan, Baoxin Yuan, Liang Huang, Yuanqiao Wen, Xue Yang, Rongxin Song, and Pieter van Gelder. 2023. "Fishing Behavior Detection and Analysis of Squid Fishing Vessel Based on Multiscale Trajectory Characteristics" Journal of Marine Science and Engineering 11, no. 6: 1245. https://doi.org/10.3390/jmse11061245