1. Introduction
Intelligent transportation systems have achieved remarkable developments in recent years. Advanced offshore vehicles and equipment are of great significance for constructing next-generation shipping systems characterized by safety, efficiency, greenness, and intelligence [
1,
2]. The dynamic and complex maritime environment, with its waves, currents, and wind, causes ships to generate a swaying motion that can significantly interfere with various waterborne operations, such as cargo lifting, unmanned aircraft take-off and landing, and weapons firing. To address these issues, various advanced technologies have been developed to mitigate the effects of the ship’s motion, including stabilizers, motion sensors, and computerized control systems. The maritime self-stabilization system is one crucial piece of equipment that ensure the stability of maritime operations. This system can effectively mitigate the risk of collision accidents during the lifting of cargo, provide a relatively stable environment for shipboard equipment, and enhance the efficiency of operations at sea [
3].
Motion compensation, as one solution which achieves offshore self-stabilization, involves the short-time high-precision prediction of ship motion under wind, wave and flow disturbances. The motion model of a ship was established by the Kalman filter, an artificial neural network, and time series analysis. Such a model could be used to predict the ship’s motion state in the next few seconds. The Kalman filter-based methods [
4,
5] rely on known ship motion parameters, hydrodynamic coefficients, and an external environment to predict the ship’s motion. Reverse propagation neural networks [
6] can model the dynamics of various floating platforms and bollard tensions, allowing for real-time response and hazard warnings for deep-sea floating systems. Tang et al. [
7] proposed a proportional-integral differential controller optimization algorithm based on particle swarm optimization and reverse propagation neural networks for a parallel stable platform. Zhu and Li [
8] used a fuzzy logic system to approximate the uncertainties caused by changes in the water depth, wind, waves, ship loading and sailing speed. An observer-based adaptive fuzzy control approach was compensated to keep the ship system stable. An autoregressive prediction model was used to predict the ship’s motion and was combined with model predictive control for the ship stabilization platform in [
9].
Either physics- or data-driven methods could predict a ship’s motion for the purpose of self-stabilization, such as [
10,
11]. Chu et al. [
12], who proposed a neural-network-based method to predict ship motion and used prediction to improve the active heave compensation of offshore crane operations. Multiscale attention mechanisms can be applied with a long-and-short-term memory (LSTM) network to promote adaptability and improve the prediction performance [
13]. In [
14], a bi-directional convolutional LSTM network and channel attention were utilized to predict the ship’s pitch change. The gate recurrent unit-based deep learning model [
15] was presented to predict the six-degree-of-freedom (6-DOF) motions of a turret-moored floating production storage and offloading unit in a harsh sea state. However, prediction performance was degraded once that current scenario became inconsistent within the preset dataset. Alternatively, time series analysis methods could update the parameters of ship motion and wave model in real-time [
16,
17]. Sparse regression was used to identify the parameters of 6-DOF ship motion exposed to waves in [
18].
Motion controllers take multistep predictions in advance as the input to compensate for the sway motion. By establishing a forward and inverse kinematic model, a group of electric cylinders was controlled by real-time attitude feedback [
19]. A sliding mode controller based on the kinematic model of the mechanism was designed for a 3-UPS/S parallel stable platform [
20]. The controller took the LSTM-based ship orientation prediction as the input. Modeling a shipborne crane system and wave disturbance force is necessary for controlling the heave and sway displacement of the crane load [
21]. Particle swarm, when optimized, could be utilized to optimize the feedback of the model predictive controller [
22] or the proportional-integrative-derivate controller [
23]. Other works [
24,
25] constructed and refined the dynamics to enhance the control effect based on kinematics. Control strategy-based approaches mostly conduct research based on traditional PID control. Gaussian process [
26] and model predictive control [
27] were studied for unmanned surface vehicles’ motion planning and control in complex maritime environments.
From the literature above, it can be seen that motion prediction and compensation control are the key technologies to achieve offshore self-stabilization. Aiming at the 6-DOF ship motion exposed to various sea conditions, this paper studied an offshore self-stabilization system based on motion prediction and compensation control. Firstly, the prediction was realized by modeling ship motion in dynamic sea conditions and the identification of parameters. Subsequently, a parallel Self-Stabilized system was designed using electric cylinders. The controller was established based on the inverse kinematic model, which took the prediction results as feedback to compensate for the sway component of the ship’s motion. Finally, the performance of the motion prediction and compensation control of the Self-Stabilized system was evaluated by quantitative experiments and analysis.
The remainder of this paper is laid out as follows: A ship motion prediction method is introduced in
Section 2. A Self-Stabilized system and its control method are presented in
Section 3. Quantitative experiments and analysis are given in
Section 4. The conclusion and future work are drawn in
Section 5.
2. Ship Motion Prediction
The 6-DOF motion of a ship can be regarded as the hull’s response to its own dynamics and the maritime environment. Directly measuring the wind, wave and current as maritime environmental factors is a challenging task. In
Section 2, a method of ship motion prediction is studied to provide input for the controller of our Self-Stabilized system. We first presented a motion model of a ship under the influence of waves and winds. Then, an autoregression model was defined to approximate the motion model and calculate the parameters. Finally, the autoregression model with the acquired parameters was used to predict the motion state of the ship, while the parameters of the autoregression model were updated in real-time using the latest observation data.
2.1. Ship Motion Modelling
The motion of a ship under different sea conditions is obviously influenced by the environmental winds and waves and has a random sway characteristic. It can be assumed that the wind speed
at a certain moment
is the sum of the average wind speed
and transient wind speed
, as follows,
where
and
is average time.
The transient wind speed
is portrayed by the energy spectral density, and its power spectral density
can be defined as:
where
is the circular frequency of the wind speed variation, and
and
are the Fourier transform and the conjugate Fourier transform of
respectively. According to the Harris empirical formula,
where
is the average wind speed at the height of 10 m, and
is the surface friction drag coefficient (
k =
),
.
The three-dimensional nonlinear model of waves can be expressed by the Pierson–Moskowitz wave density equation.
where:
denotes the wind speed at the sea surface height of 19.4 m. is the gravitational acceleration and the effective wave height , which is proportional to the square of the wind speed.
The motion of a ship can be defined by the Newtonian Euler equation. A ship is regarded as a rigid body with a constant center of gravity, and its motion equation can be written as:
The right of the above equations refers to the combined forces and moments , , , , , in the 6-DOF, respectively. The first three equations are force calculations, and the left is composed of the inertial force caused by the acceleration of the rigid body, the inertial force caused by the rotation of the rigid body, and the additional inertial force caused by the non-coincidence of the origin of the body coordinate system and the center of gravity. The last three equations are moment analyses, and the left is composed of the inertial moments caused by the accelerated rotation of the rigid body, the inertial moments caused by the representative gyroscopic effect, and additional moments due to the non-coincidence of the origin of the body coordinate system and the center of gravity, respectively. In addition, is the mass of the ship, represents the position of the center of gravity, and are the velocities and angular velocities in the longitudinal, lateral and vertical directions, respectively.
2.2. Autoregression Model and Parameter Initialization
An autoregression model was developed to estimate the parameters of the above ship motion model. First, the historical data of the ship’s motion were collected as observation samples. Then, the initial parameters of the autoregression model were acquired by solving the least square solution. The order of the autoregressive model was determined by the model order fixing criterion. Specifically, the autoregression model of the ship’s motion can be assumed as follows.
where
is the predicted state at the next time
,
is the motion state at the time
.
is the model parameters and
is white noise. The least square method was used to estimate the parameters of the autoregression model. It can be assumed that there are a total number
of historical ship motion data. The historical data are considered as zero-mean smooth time series. According to the
order autoregression model, a set of equations can be obtained by bringing
into Equation (7).
The above equation can be abbreviated as,
The squared sum of the residual error can be calculated as,
The optimal solution about the parameters
is calculated by solving the partial derivatives, as follows,
2.3. Parameter Update and Motion Prediction
To ensure the real-time of the model and mitigate the data saturation of the least square method, the forgetting factor was introduced into the parameter estimation, name limited memory recursive least square method. The forgetting factors were allocated to the historical data so that the weights of the historical data decreased exponentially over time.
where
,
.
As a result, the total process of the ship’s motion prediction based on autoregression is shown in
Figure 1. Firstly, the maximum order of the autoregression model is determined as
. Using the historical observation data with length
as the sample set, the parameters of the autoregression model could be solved by the traditional least square method in the initialization stage. Subsequently, the prediction of ship motion could be carried out periodically by the autoregression model with the initial parameters. The predicted motion states
at the next time
can be calculated by Equation (15). In the meantime, new observation data were continuously obtained by the onboard inertial measurement unit (IMU) during the prediction, and the parameters of the autoregression model could be updated in real-time by the limited memory recursive least squares method.
4. Experiments and Analysis
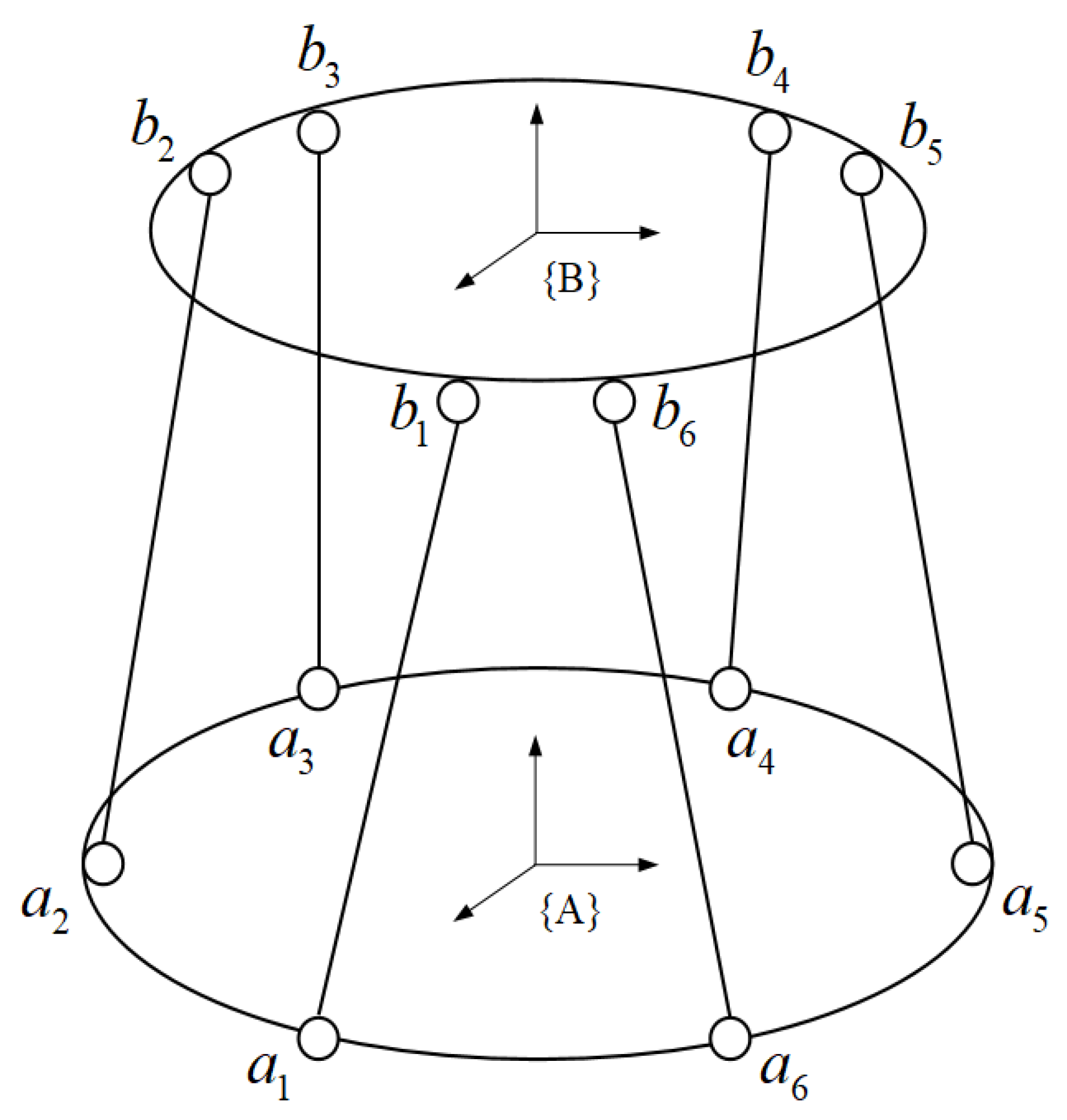
The Self-Stabilized system designed in this work adopts the Stewart mechanism. The position and attitude of the end actuator (platform B) are controlled by six electric cylinders connected to the base (platform A). One end of each electric cylinder is connected to the base with a 2-DOF universal joint, and the other end is connected to the end actuator with a 3-DOF spherical joint. Platform A simulates the ship’s motion through a traditional ship motion model presented in
Section 2.1, while platform B is controlled to keep a constant attitude through the Self-Stabilized controller. Both platforms A and B are equipped with high-performance inertial sensors (XSENSE MTi-G-710,
https://www.movella.com/products/sensor-modules/xsens-mti-7-gnss-ins#specs, accessed on 29 March 2023). The sensor is a fully integrated solution that includes an onboard GNSS receiver and a full gyro-enhanced attitude and heading reference system. An enhanced 3D pose and velocity are given. For example, the root mean square error (RMSE) of the roll/pitch angle is 0.6 deg while the yaw angle is 1.5 deg. The sensor performs high-speed dead-reckoning calculations at 1000 Hz allowing the accurate capture of high-frequency motions.
4.1. Motion Prediction
To simulate ship motion at sea, Fossen’s 6-DOF dynamic model was applied, which includes swaying, surging, heaving, rolling, pitch and yaw motions in the 3D position and attitude. The effectiveness of the proposed ship motion prediction method was illustrated by comparing the acquired predictions with the simulation data.
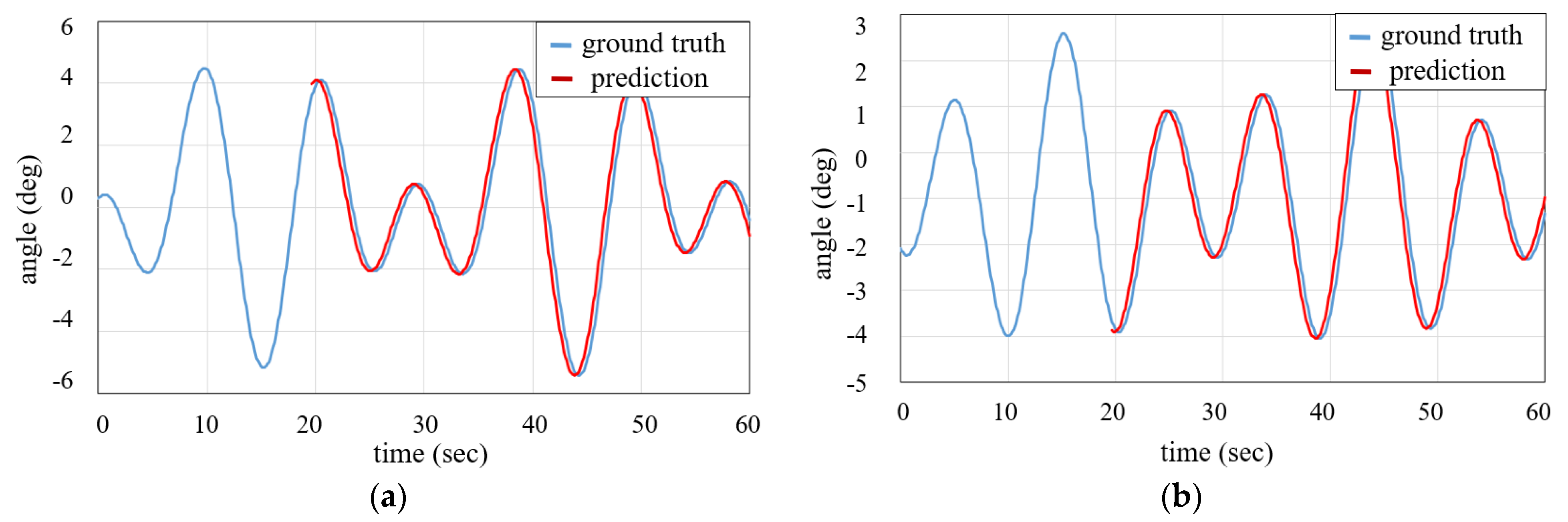
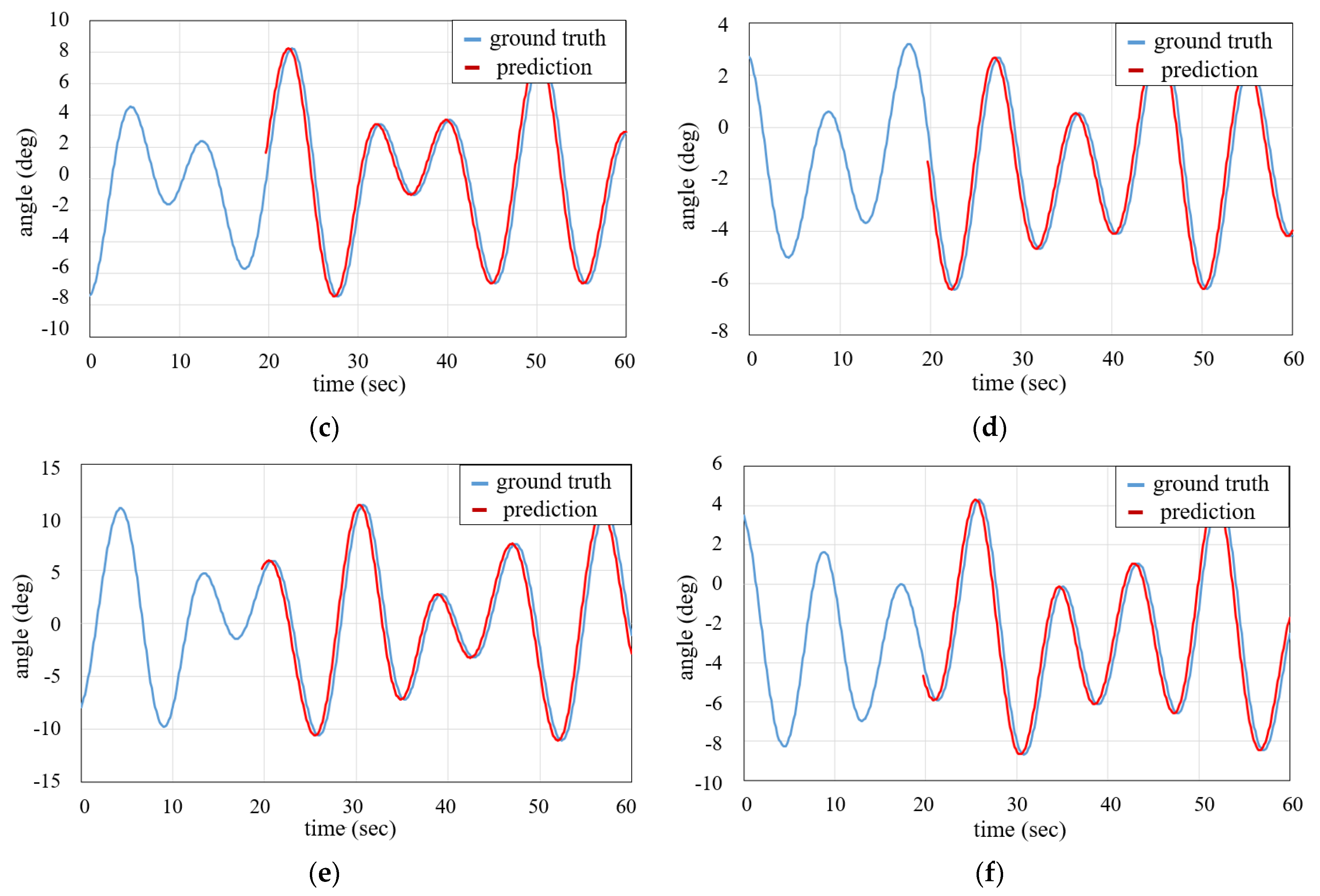
As shown in
Figure 4, the ship motions in class 3–5 sea conditions are simulated, respectively. The higher the sea condition class, the more severe the changes in the roll angle and pitch angle. Using the roll and pitch angle data of the previous 20 s as the sample, the parameters of the proposed prediction model are initialized. Then, the model parameters are updated with real-time data. The prediction results are given in
Figure 4. Even for the under Class 5 sea condition, the prediction of the pitch and roll angle changes are approximatively consistent with the ground truth. The corresponding errors were calculated and are given in
Table 1. The prediction error rates of roll and pitch angle at class 3 were 0.581% and 0.543%, respectively. The prediction error rates of roll and pitch angle at class 5 were 0.733% and 0.922%, respectively. It can be seen that the maximum prediction error of the proposed method was less than 1%. The proposed method was able to help the realization of the offshore Self-Stabilized system.
4.2. Compensation Control
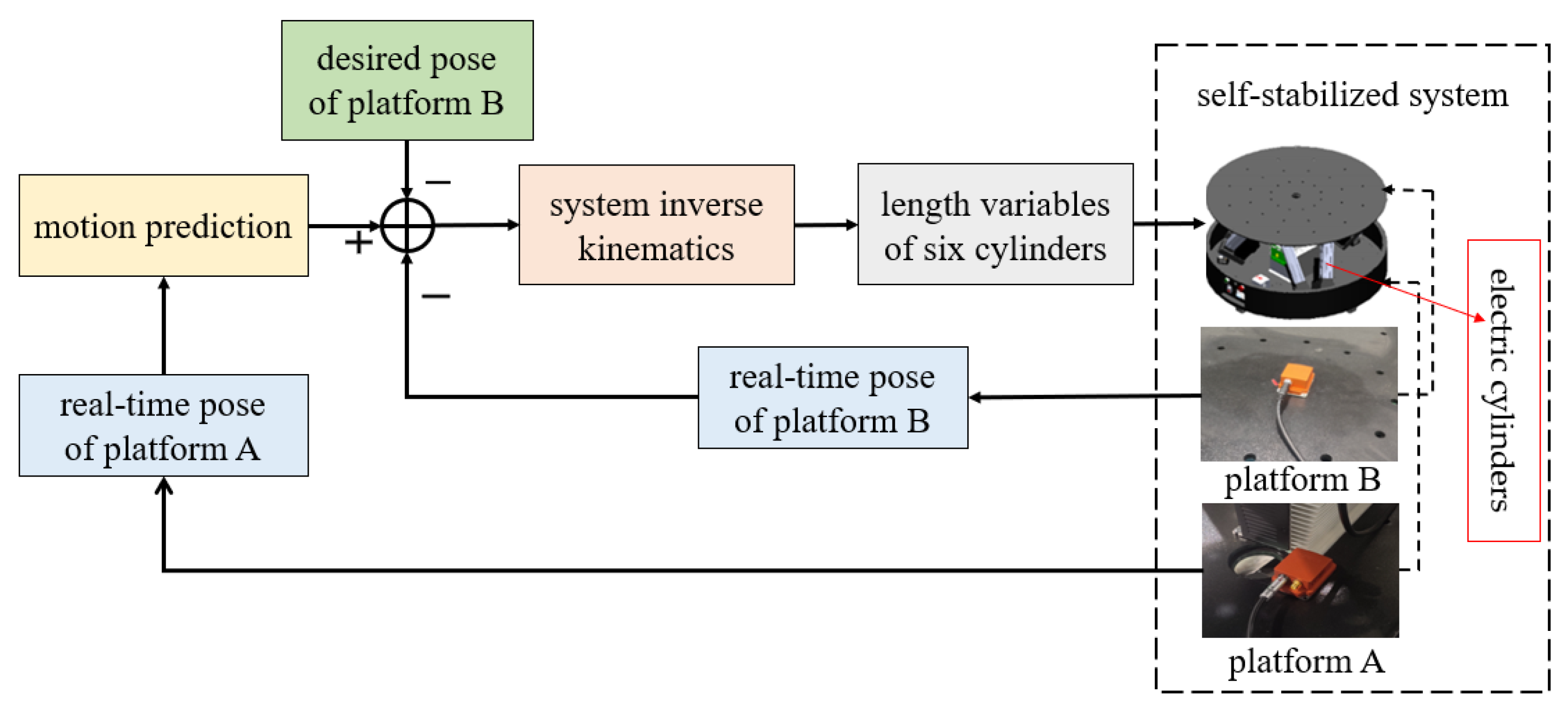
The Self-Stabilized system and its compensation control method were tested by two experimental setups. Due to the limitation of the driving device in the experiments, only the pitch and roll angles of platform A changed over time. In future work, platform A’s motion should be extended in displacement and yaw directions, and control compensation of other DOFs needs to be carried out to illustrate the performance of the Self-Stabilized system.
Firstly, the proposed control method was verified by straightforward 1-DOF motion compensation. Platform A simulated the motion of a ship by the driving of a sine function. Through the proposed control method in
Section 3, platform B of the Self-Stabilized system could compensate for the motion of platform A. Through the motion compensation, the real-time attitude variations of platforms A and B are shown in
Figure 5. When the roll angle changed with an amplitude of 10 deg and a period of 0.1hz, the maximum error of the controller was 0.82 deg, and the mean error was 0.4 deg. The corresponding errors are calculated in
Table 2. It can be found that the maximum error of the proposed controller was no more than 1 deg while the mean error was limited to 0.5 deg.
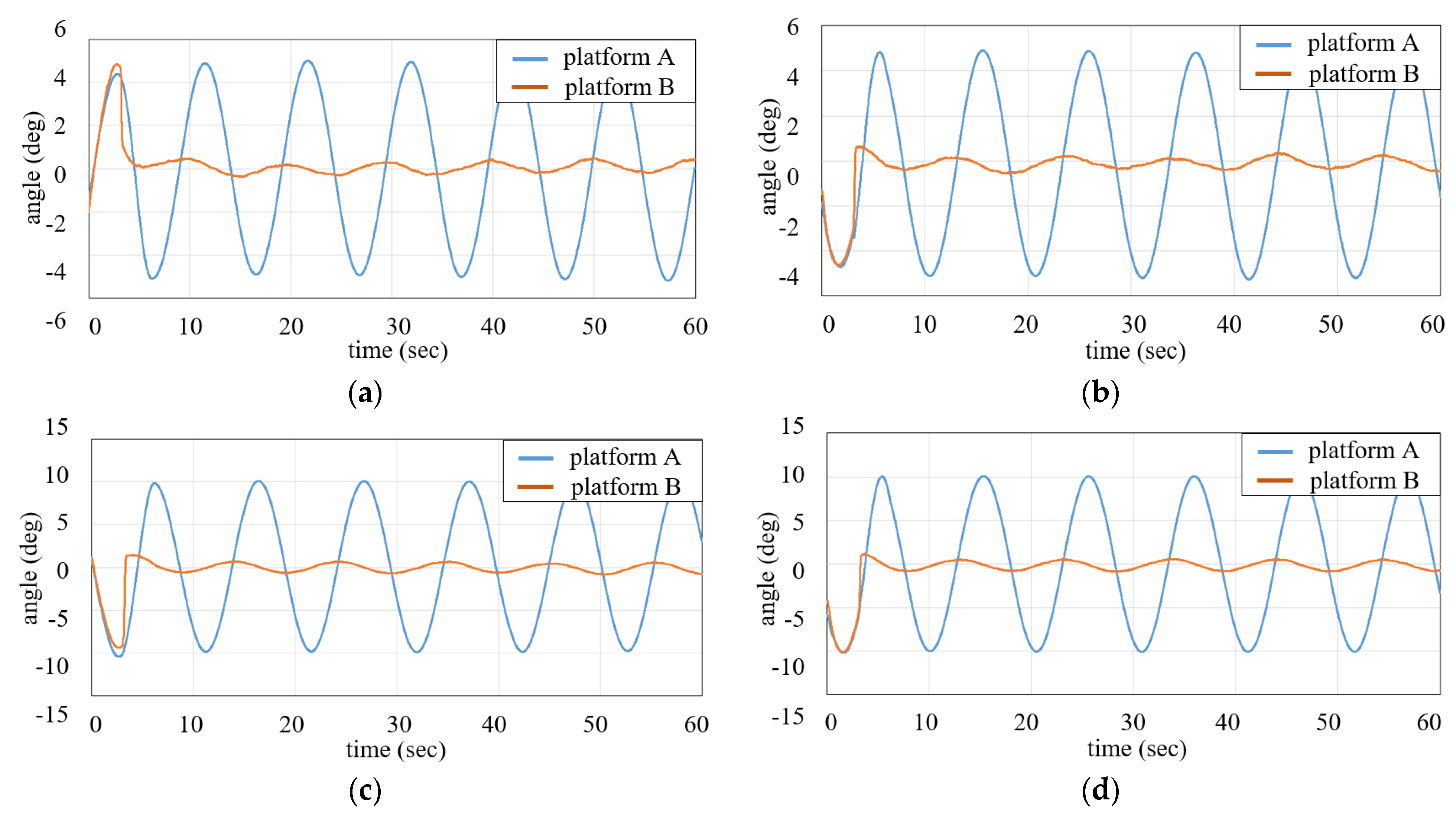
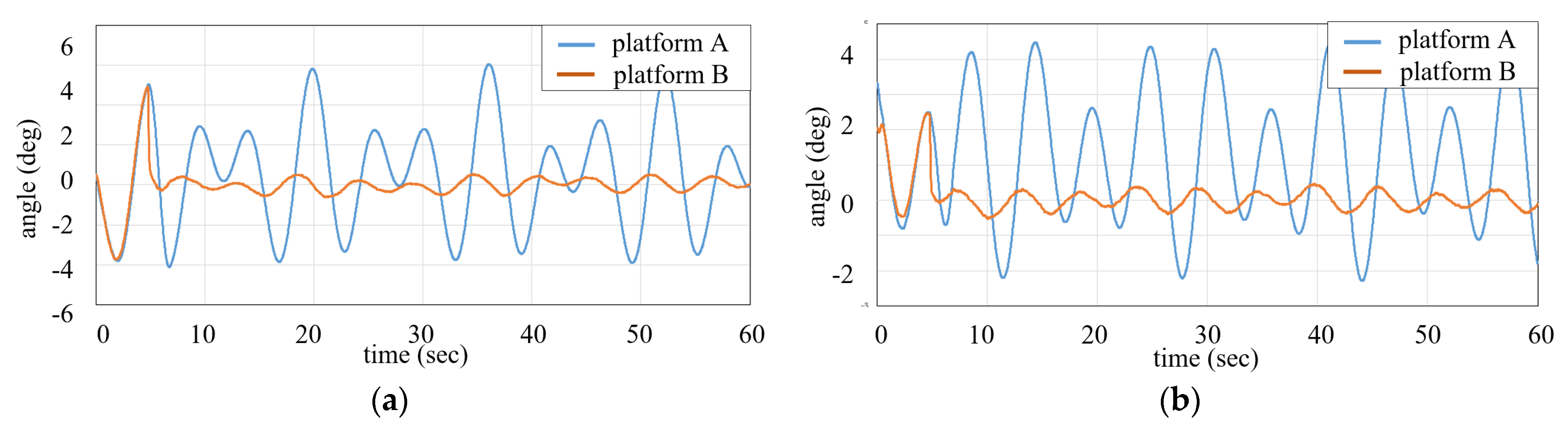
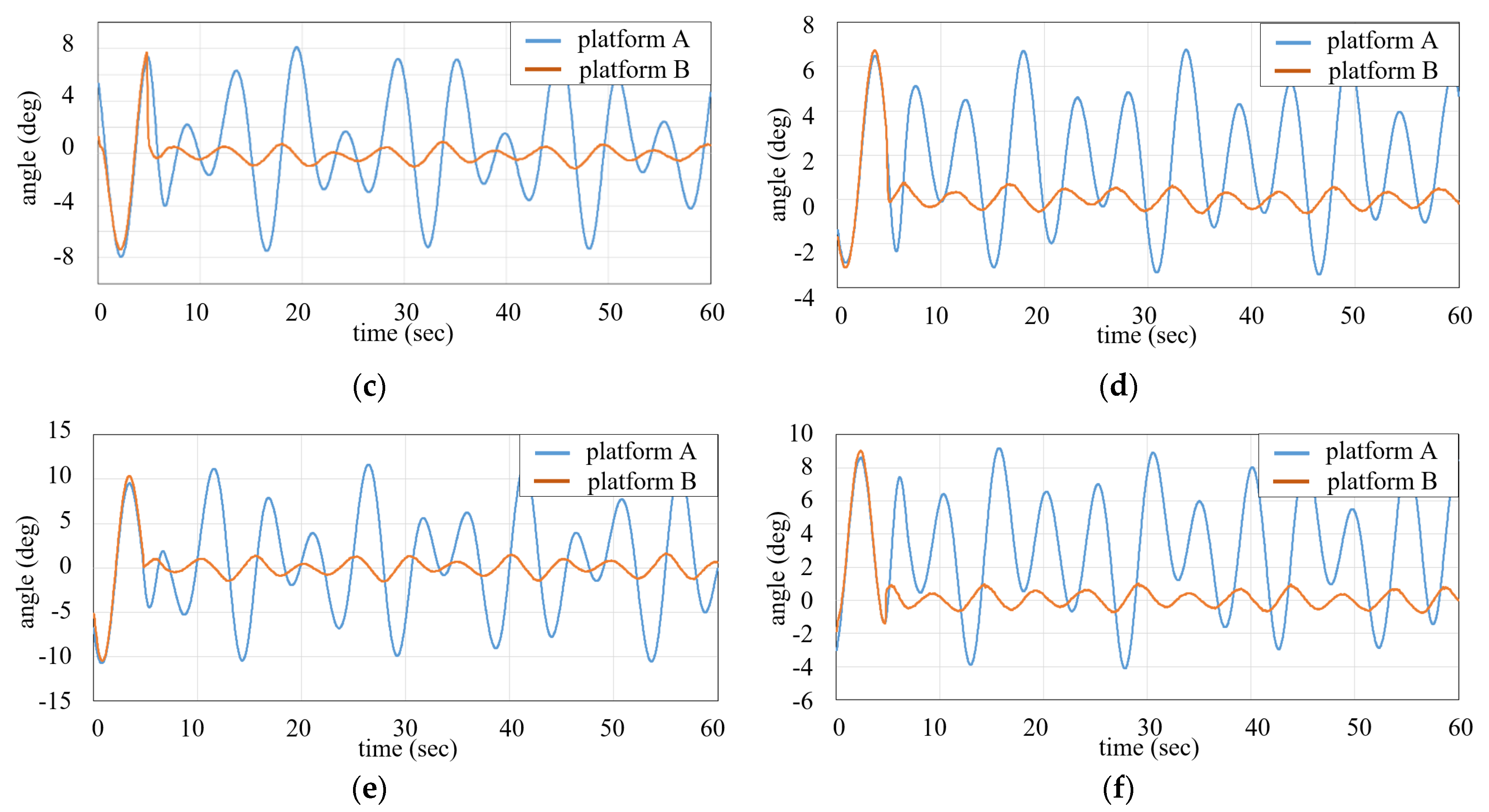
Subsequently, the Self-Stabilized system with the proposed control method was applied close to real experiments. The ship’s motion was simulated in different sea conditions by changing the pitch and roll angles simultaneously with random amplitudes. The response of the Self-Stabilized system is shown in
Figure 6. The corresponding errors were calculated and are given in
Table 3. The mean errors at class 3 rolling and pitching were 0.25 deg and 0.19 deg, respectively. The maximum errors at class 5 rolling and pitching were 1.6 deg and 0.96 deg, respectively. In one word, the maximum control error of the self-stabilization system was less than 2 deg, and the average error was stable within 1 deg. The control accuracy of the Self-Stabilized system was acceptable.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}