3.1. Geometry of Target Ship and Flow Control Fins
In this study, a 1000 TEU container ship built by Daesun Shipbuilding and Engineering Co. Ltd. was designated as the baseline hull form. This model was chosen due to the availability of a reliable CFD database with a high level of correlation with model test data. In addition, this vessel belongs to the feeder class of 1000~1999 TEU, which is the most frequently built container ship class. A model with a scale ratio of
was considered for both numerical simulations. The principal particulars of the baseline hull and propeller are listed in
Table 1.
Figure 4 illustrates 3D volumetric views of the baseline hull form and propeller.
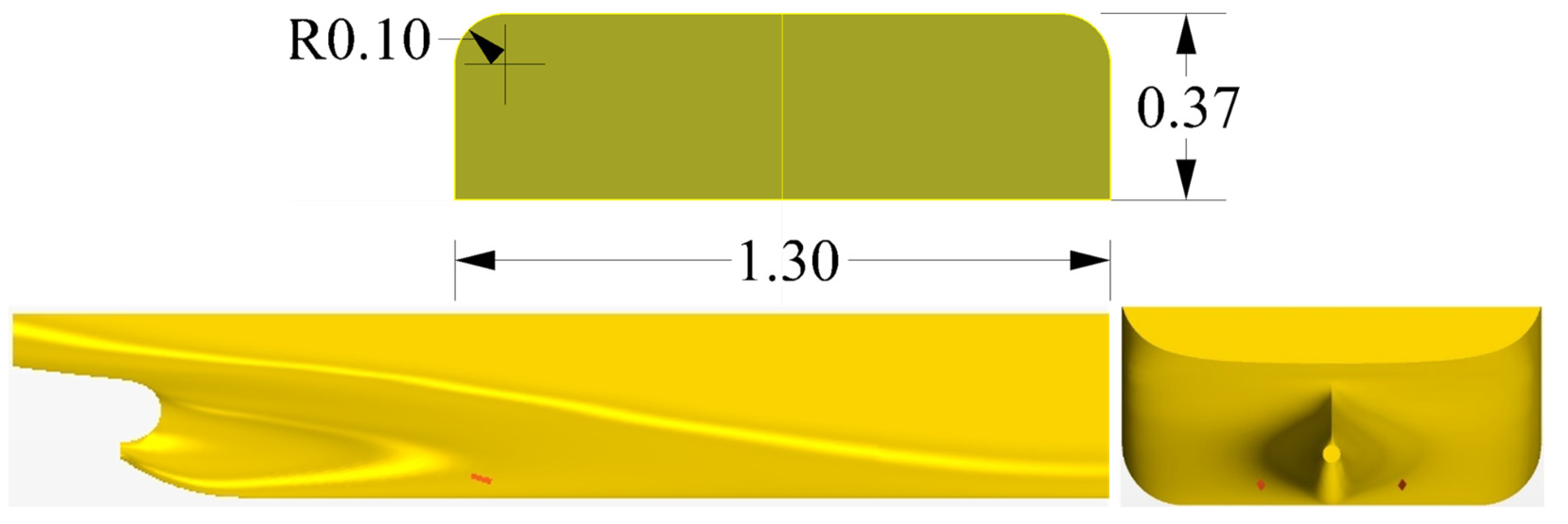
The flow control fins (FCFs) employed in this study were in the shape of a rectangular plate with rounded corners, as shown in
Figure 5. The dimensions of the FCF were 1.30 m (length) × 0.37 m (height) × 0.03 m (thickness) in full scale. These dimensions correspond to
(length) ×
(height) ×
(thickness) in terms of propeller diameter,
. As shown in
Figure 5, the FCFs are attached perpendicularly to the hull surface on the stern part of the hull. Usually, the FCFs are attached in pair(s) at the same positions on the port and starboard sides. The design variables of the FCF adopted in this study were the longitudinal and vertical positions of the FCF and the inclination angle. Here, the position of the FCF corresponds to the midpoint of the baseline, and the inclination angle corresponds to the angle formed between the baseline of the FCF and the baseline of the hull. Depending on the design variables of the FCF, the downstream flow is affected differently in terms of spatial extent and velocity increment. In other words, the design variables of the FCF are optimized to change the propeller inflow in the intended manner, i.e., to be accelerated and become more uniform. The objective function for the optimization process will be described in detail in
Section 4.2.
3.2. CFD Simulation for Training Data
In order to train, validate and test the neural network, a total of 693 data sets were obtained via the CFD analysis. Each data set corresponded to one design parameter set, with total design parameter sets being a combination of 11 longitudinal positions vertical positions inclination angles . Here, represents the station length, which is 1/20 of the length between perpendicular .
For the CFD analysis of the flow around a ship hull, the commercial CFD package STAR-CCM+ v.15.06 was employed. The governing equations for the CFD analysis are the continuity equation and Reynolds-Averaged Navier–Stokes (RANS) equation. These equations are expressed in tensor notation as follows:
where
is the velocity component in the
direction, while
and
are the static pressure, fluid density, fluid viscosity, Reynolds stress and gravitational acceleration in the
-direction, respectively.
The Reynolds stress turbulence model, which is known to be excellent in resolving bilge vortex and capable of high-accuracy prediction of the flow around a ship hull [
21], was employed in the numerical analysis. The transport equation, derived from the RANS equation, is given as follows:
where
is the Kronecker delta and
,
and
correspond to the diffusion, production and pressure strain terms, respectively, which are defined as follows:
Here, , and are turbulent model constants. In addition, and stand for the turbulent kinetic energy and dissipation rate, respectively.
Figure 6 illustrates the computational domain, which is a rectangle occupying the range of
and
. Due to the symmetry about the centerplane
, only half of the domain was considered. Furthermore, double-body simulation, in which the underwater hull is mirrored about the free surface
, was carried out for all simulation cases. Through completing this step, wave generation due to the ship hull and consequent wave-making resistance was neglected. However, this process does not cause any complications in analyzing the effect of varying the FCF design on the flow field because the deep submergence of FCFs prevents them from affecting the free surface. Through omitting the time-consuming free surface calculations, the double-body simulation can significantly shorten the analysis time, which is crucial as this study involves numerous test cases. The boundary conditions for the surfaces of the computational domain in
Figure 6 are summarized in
Table 2.
It is worthwhile to mention that automation in pre-processing steps, such as geometry modeling and mesh generation, is of profound importance for the sake of overall computational efficiency for the entire 693 simulation cases. Processes such as 3D modeling of the hull form with varying FCF, mesh generation, and creation of CFD settings for each case were performed with professional hull form design S/W of OptHull® (Cadas Co., Ltd., Changwon, Republic of Korea) The subsequent processes involved in the configuration of STAR-CCM+ and analysis automation were controlled via an in-house JavaScript code. Using a Message Passing Interface (MPI) parallel computing cluster consisting of 140 CPU cores (Intel Xeon 2.6 GHz), it took approximately 323 h to complete the 693 simulations required for the preparation of data.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}