1. Introduction
With the rapid development of sea-crossing bridges, a multi-span continuous bridge has been broadly used in the fields of civil engineering and transportation engineering. Due to the action of complicated environmental loads, the bridge may produce excessive vibration, reducing the stability and fatigue strength of the bridge. In this regard, it is often used to install TMDs to suppress excessive vibration of the bridge. The precision of the dynamic model, however, has a significant impact on the TMDs’ capacity to reduce vibration. In order to better use TMDs for vibration control of the multi-span continuous bridge, the first step is to create an accurate dynamic model.
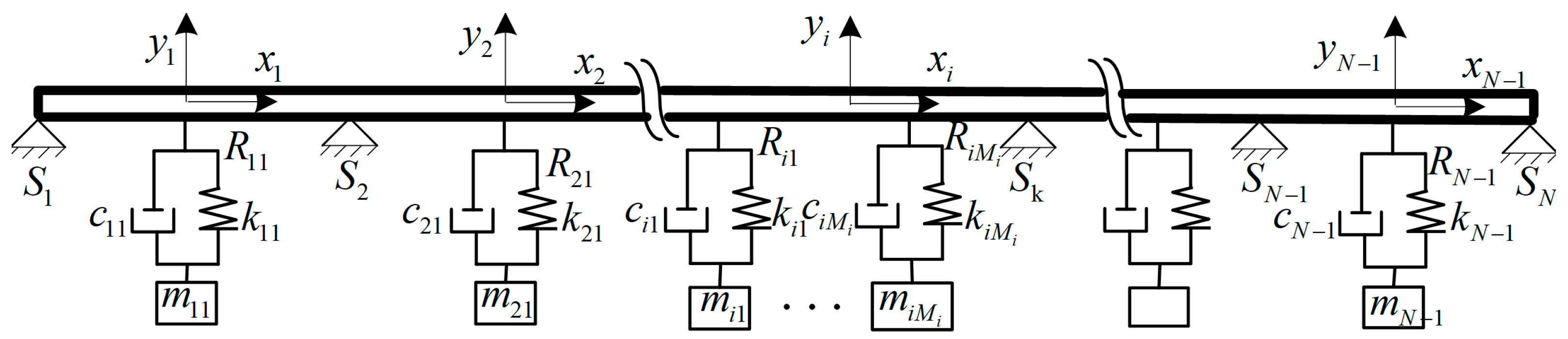
For the bridge system with TMDs, it is usually separated into the beam bridge and the TMDs subsystem in the process of dynamic modeling, and then the dynamic model of the scheme is constructed by coupling the interaction forces of these two subsystems. The partial differential equation controls the continuous scheme with infinite degrees of freedom (DOFs), known as the beam. To facilitate dynamic analysis and control, it needs to be converted to a discrete system with finite DOFs, described by the ordinary differential equation.
For a single-span bridge system with TMDs, because of the simple structure of the single-span bridge, the trigonometric function can be directly selected as its mode function to obtain the dynamic model with low dimension and high accuracy. As a result, this model is frequently used to analyze how the TMDs on the bridge reduce vibration under different loads, such as moving load [
1,
2,
3,
4,
5,
6,
7] and wind load [
8,
9,
10,
11,
12,
13]. Wang et al. [
1] analyzed the suppression impact of the TMD on bridge vibration caused by the train, and the findings indicate that the TMD has a good vibration suppression effect when the train is at resonance speed. Then, they analyzed the vibration suppression effect of multiple TMDs on the bridge under the resonant speed of the train [
4]. The reduction of self-excited vibration between a vehicle and a bridge using the TMD was investigated by Zhou [
6]. Andersen et al. [
10] studied how the TMD affected the resonance of bridges caused by the vortex. Xu et al. [
9] proposed a TMD with an inert device, which can better suppress the vortex-induced resonance response of the bridge. Domaneschi and Martinelli found that the energy dissipation device in passive TMDs can also perform better in wind buffering vibration [
14]. In addition, many other scholars have proposed various types of TMDs [
15,
16], such as Pellizzari et al., who studied the optimal performance design criteria of MTMD based on structural uncertainty [
17], which have been applied to single-span bridges to demonstrate their better vibration suppression effects compared to traditional TMDs [
18,
19].
For the multi-span continuous bridge system with TMDs, because of its complex structure, the mode function with analytical expression cannot be directly obtained as for the single-span bridge. The FEM is used to first determine the mode displacements of each node of the structure, and the mode functions of the bridge are fitted by the interpolation method [
20,
21]. The interaction between the bridge and the TMD is then used to build the dynamic model of the multi-span bridge. Based on this, many scholars have researched the vibration suppression effect of the TMD on multi-span bridges under vortex excitation [
22,
23] and seismic excitation [
24,
25], and the TMD optimization design for vibration control of multi-span bridges. Crespi et al., based on the FEM, evaluated the safety and durability of the structure based on a variety of reinforced concrete multi-span bridges [
26,
27].
Although the FEM and the interpolation method may be used to generate the mode functions of the multi-span continuous bridge, the process of obtaining the mode functions has the problems of a heavy workload and being time-consuming, which brings great inconvenience to the establishment of the dynamic model and the dynamic analysis based on the model. In contrast, using the analytical method to obtain the mode functions of the multi-span continuous bridges can not only ensure its accuracy but also greatly reduce the workload. In this regard, Ichikawa et al. [
28] obtained the mode functions of multi-span bridges by combining the eigenfunction expansion method with the direct integration method. The coefficient matrix of the vibration scheme eigenfunction was established by Lin and Tsai [
29] using the numerical assembly approach for the traditional FEM. The multi-span beam with spring-mass systems’ natural frequencies and mode functions may be found by solving the matrix. However, obtaining the modal function of a multi-span bridge by the analytical method mentioned above is still quite tedious, which brings difficulties to the dynamic modeling of the multi-span continuous bridge with TMDs. In recent years, Wei and Cao proposed a methodology suitable for obtaining the mode functions of complex flexible structures. The process of obtaining the mode functions is simple and straightforward, and has been utilized to model the dynamic behavior of flexible space manipulators [
30], multi-beam jointed structures [
31,
32], and flexible spacecraft with jointed solar wings [
33,
34]. Based on this methodology, the presented work is devoted to obtaining the mode functions in analytical form for the purpose of establishing the analytical dynamic model of the multi-span bridge with TMDs.
In this research, the explicit orthogonality relations for mode forms of the multi-span beam are described. Mode shapes of the multi-span bridge were derived using the approach suggested in [
30,
32,
34]. By applying the mode functions of the multi-span bridge and their orthogonal relations, the analytical dynamic model of the entire system is generated through the interaction force coupling between the multi-span continuous beam and the TMDs. To show the validity of the suggested model, the natural frequencies produced by the proposed model are compared with those obtained by the finite element software ANSYS. The dynamic responses of the system under the vortex-induced force are presented, based on the dynamic equations in the suggested model, to evaluate the suppressing impact of TMDs on the vibration response of the multi-span bridge.
3. Dynamic Model
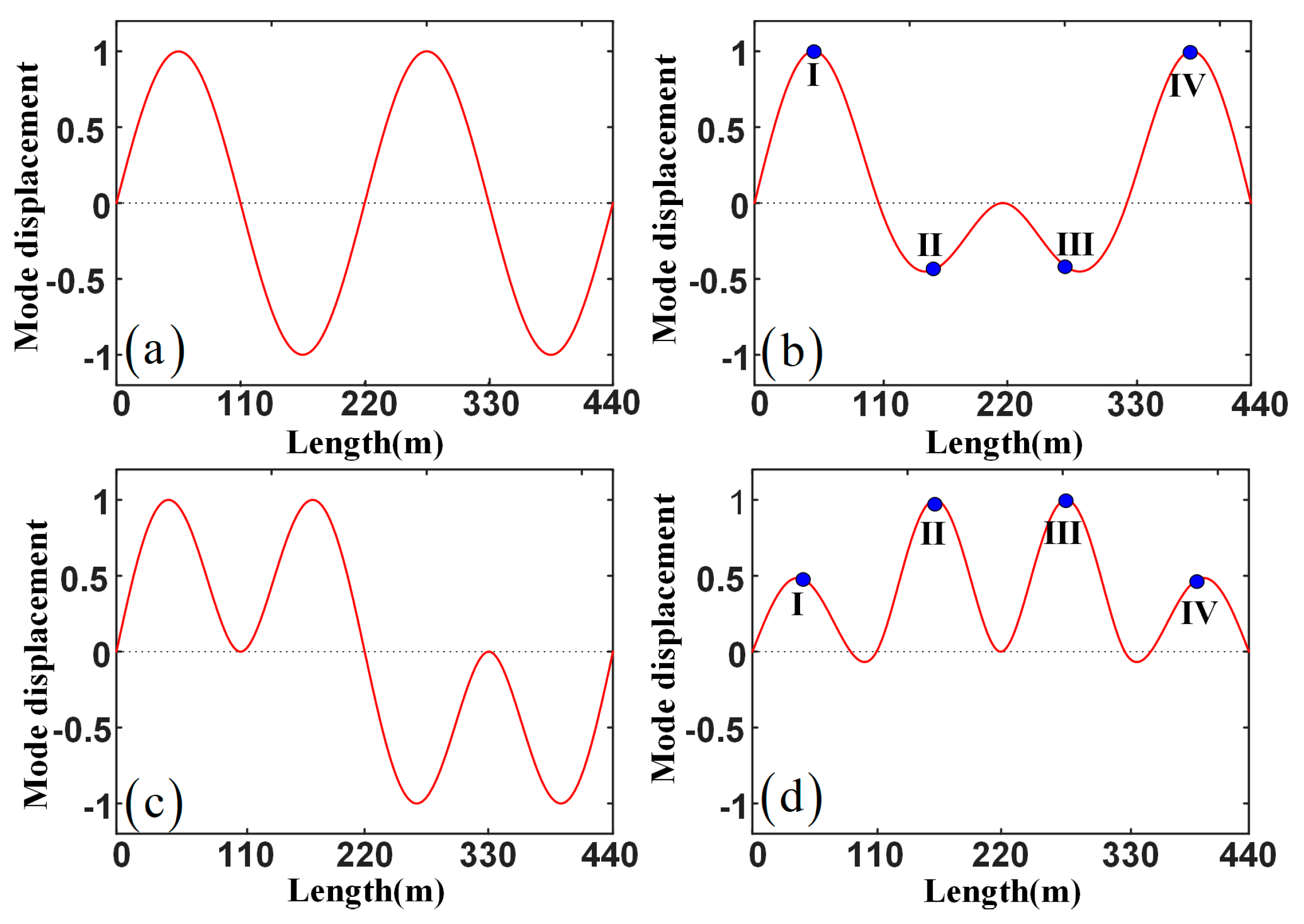
By using the characteristic Equation (13) and the frequency Equation (14), the mode shapes of the continuous bridge can be determined. Then, the displacements of the bridge can be expressed as a series of spatial mode shapes multiplied by time-dependent modal coordinates, as:
where
is the
r-th mode shape of the
i-th span of the bridge, and
is the
r-th modal coordinate.
Introducing Equation (24) into the equation of motion of the bridge in (1) leads to:
Multiplying Equation (25) by
, integrate the resulting equations from
to
for the
i-th span of the bridge. Using the orthogonality relations in Equations (22) and (23) and arranging all the derived equations, we have:
Combining Equations (3) and (26), we get:
where
and
are
matrices, and
and
are
vectors, and they are expressed as:
The other parameters in Equation (28) are presented in
Appendix A.
By omitting the damping and external loads from Equation (27), the equations of motion of the system with multi-degrees-of-freedom are stated as:
The solution of Equation (29) is written in the following form:
Equation (30) is substituted into Equation (29), resulting in:
A nontrivial solution is possible only when:
The roots of Equation (32) represent the natural frequencies of the system, which are denoted in ascending order by . Once the r-th natural frequency, , of the bridge system is solved by Equation (32), the corresponding vector, , can be determined by Equation (31).
5. Conclusions
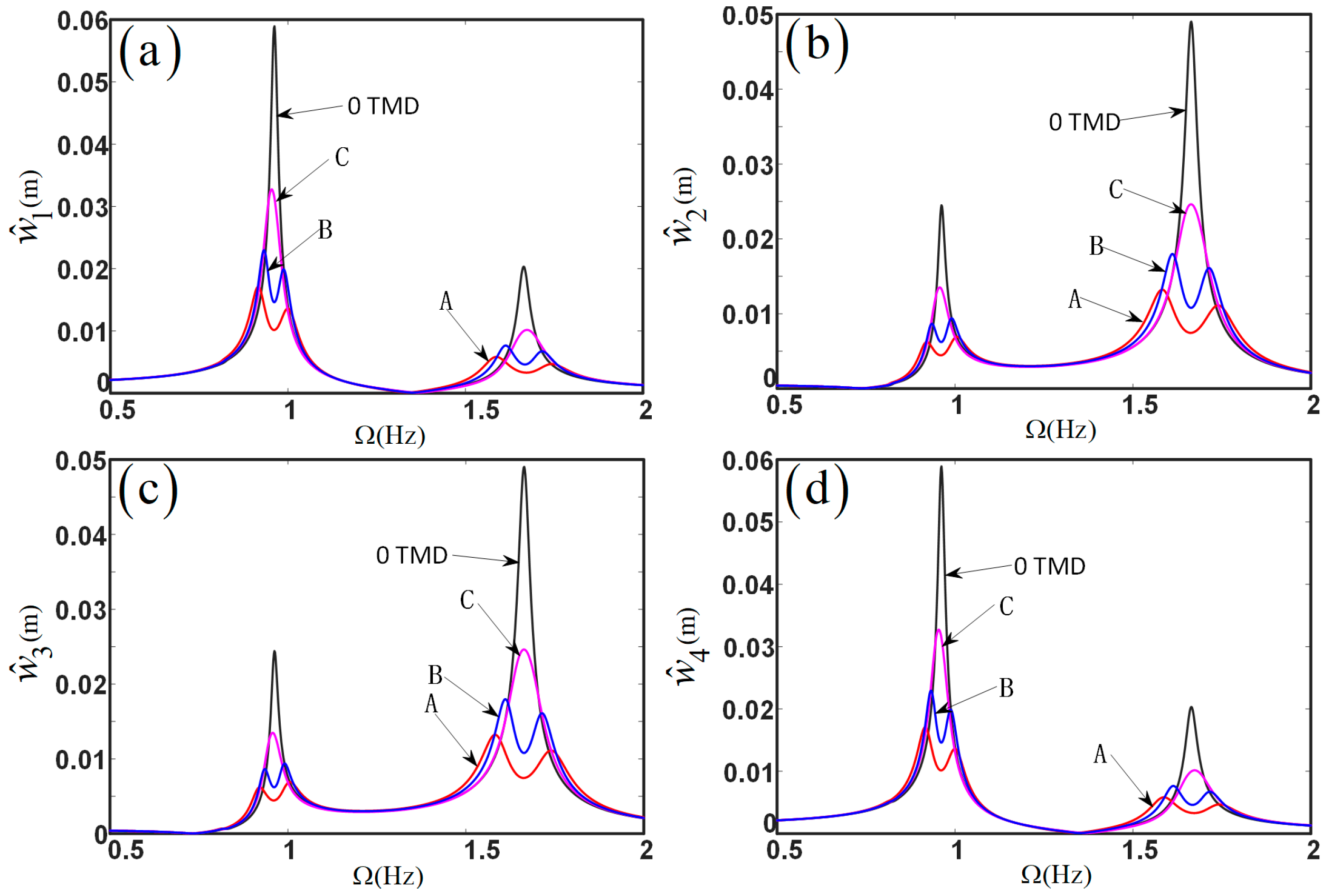
In this paper, a dynamic modeling approach has been described to establish an analytical model for a continuous bridge with any number of spans and with any number of TMDs. Using the approach proposed in this paper, the analytical mode shapes of the multi-span continuous bridge can be easily obtained, which is very helpful for the design of the location and number of the TMDs to achieve the appropriate vibration suppression effect on the bridge. More importantly, the use of the analytical mode shapes of the multi-span continuous bridge resulted in fewer degrees of freedom for the model of the system. This is very useful for using analytical methods to study the vibration suppression effect of TMDs on the multi-span continuous bridge under a complex vortex force.
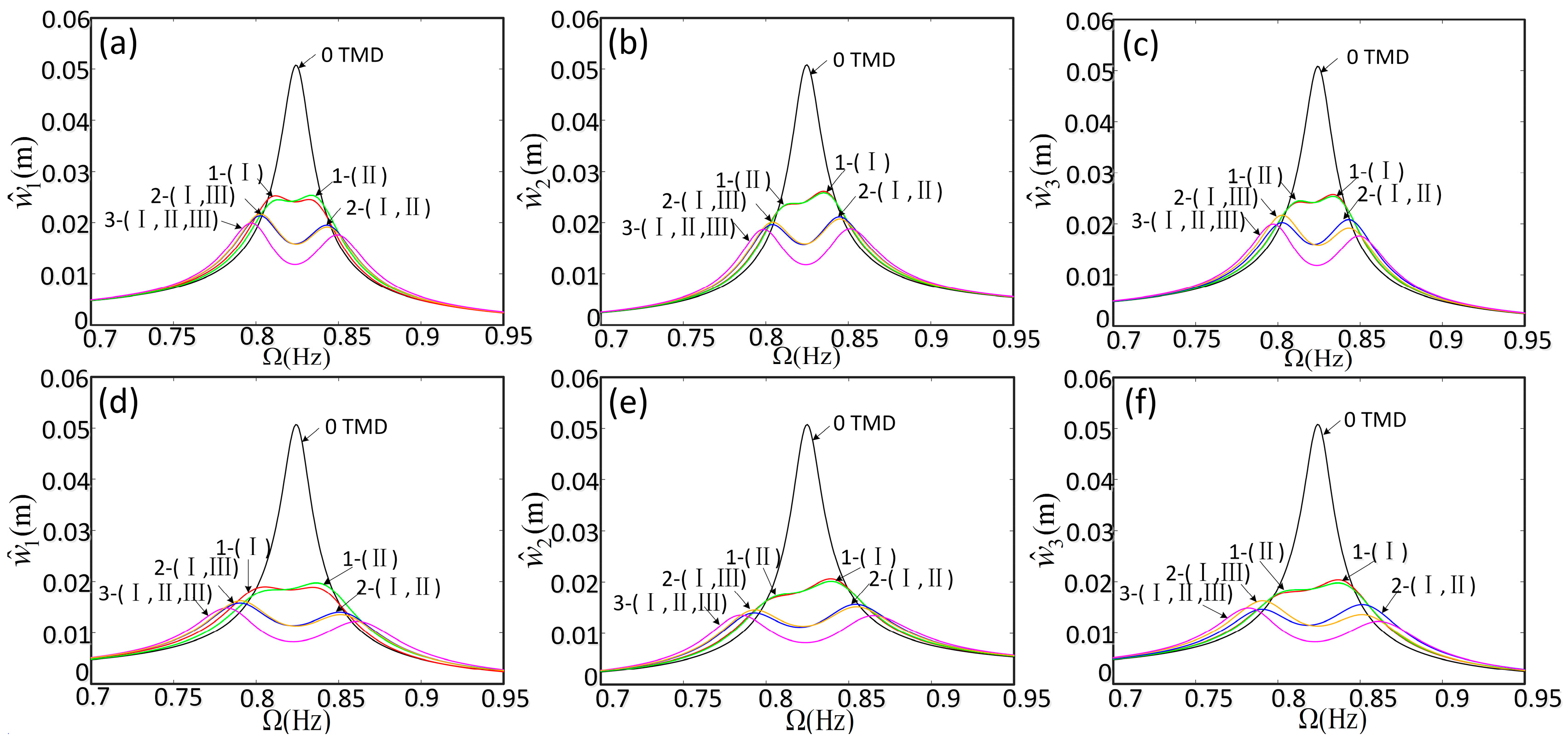
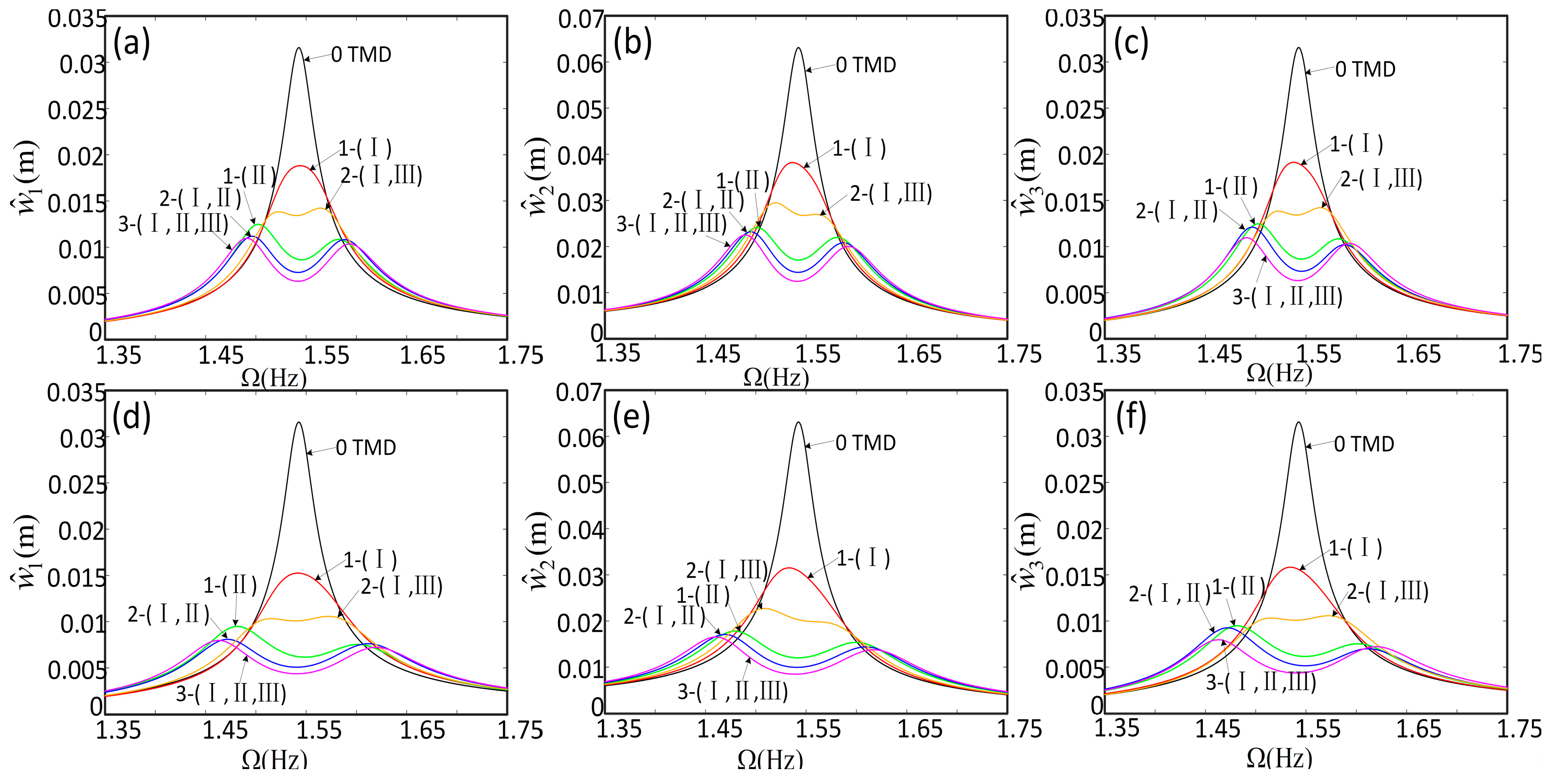
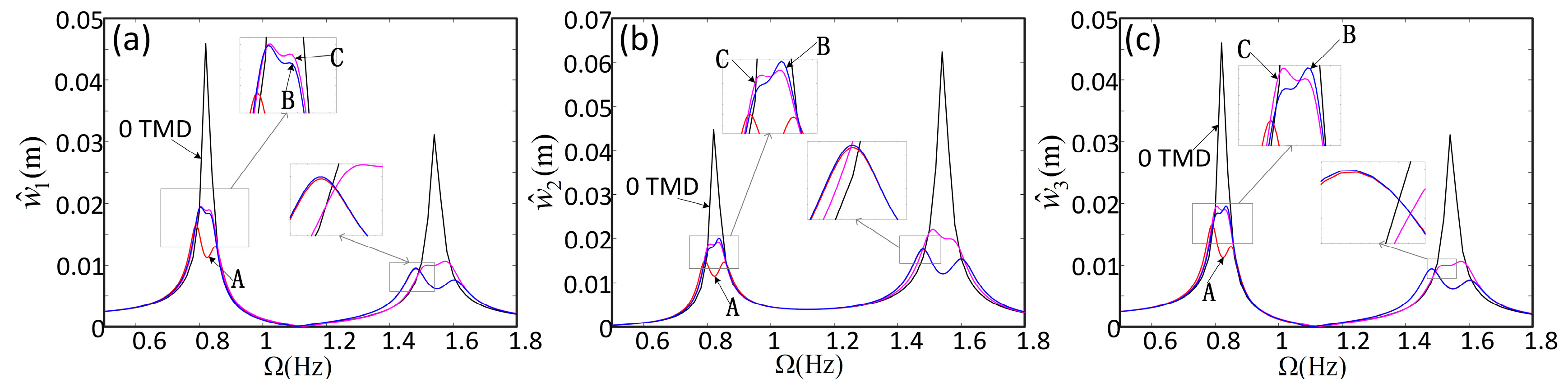
By comparing the natural frequencies calculated here with those obtained from the finite element software ANSYS, the validity of our approach has been verified. Then, based on the ODEs derived in the proposed model, the dynamic responses of three-span and four-span bridges have been calculated to study the influence of the location and number of TMDs on the vibration suppression of the bridge. The conclusions are summarized as follows:
- (1)
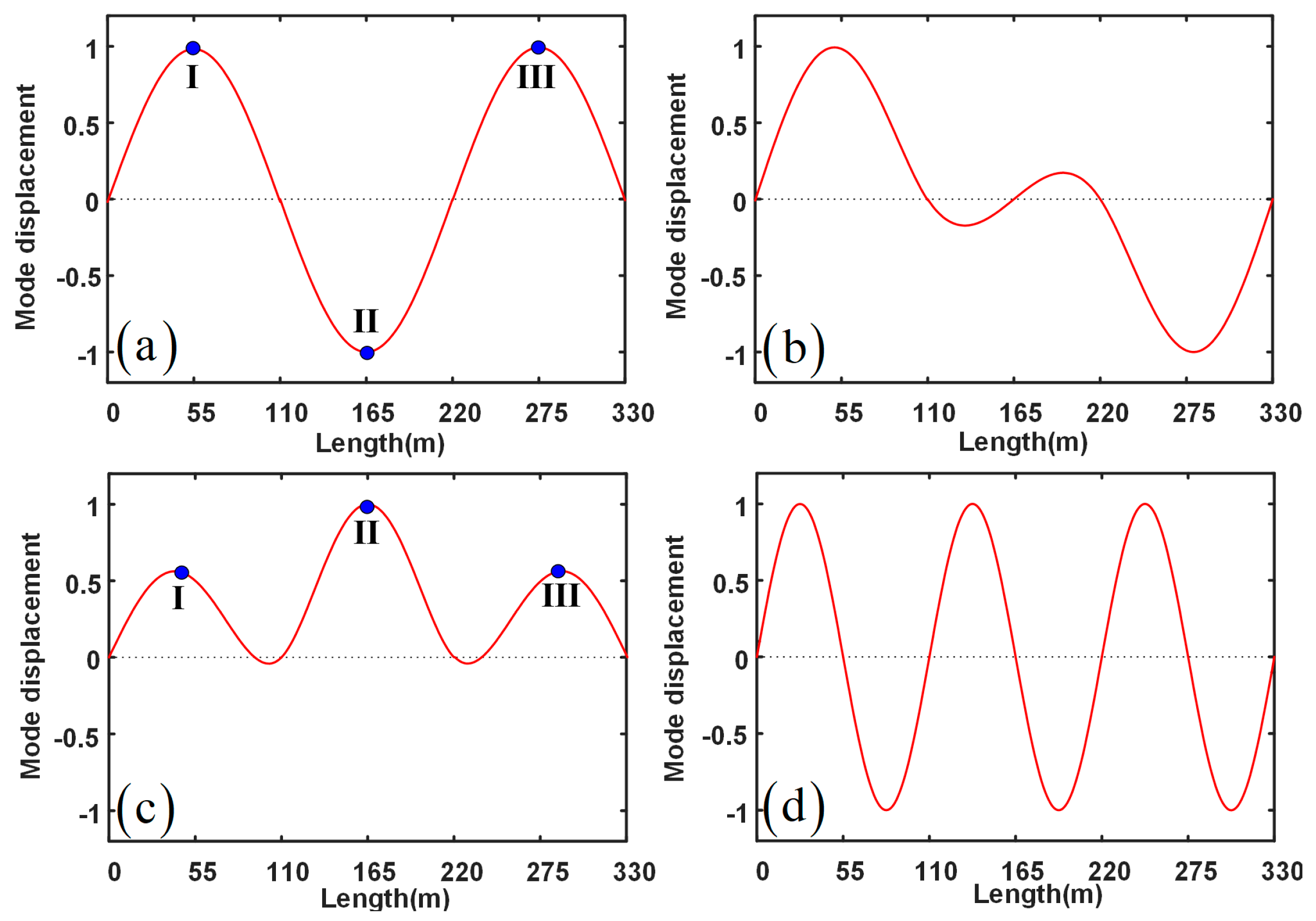
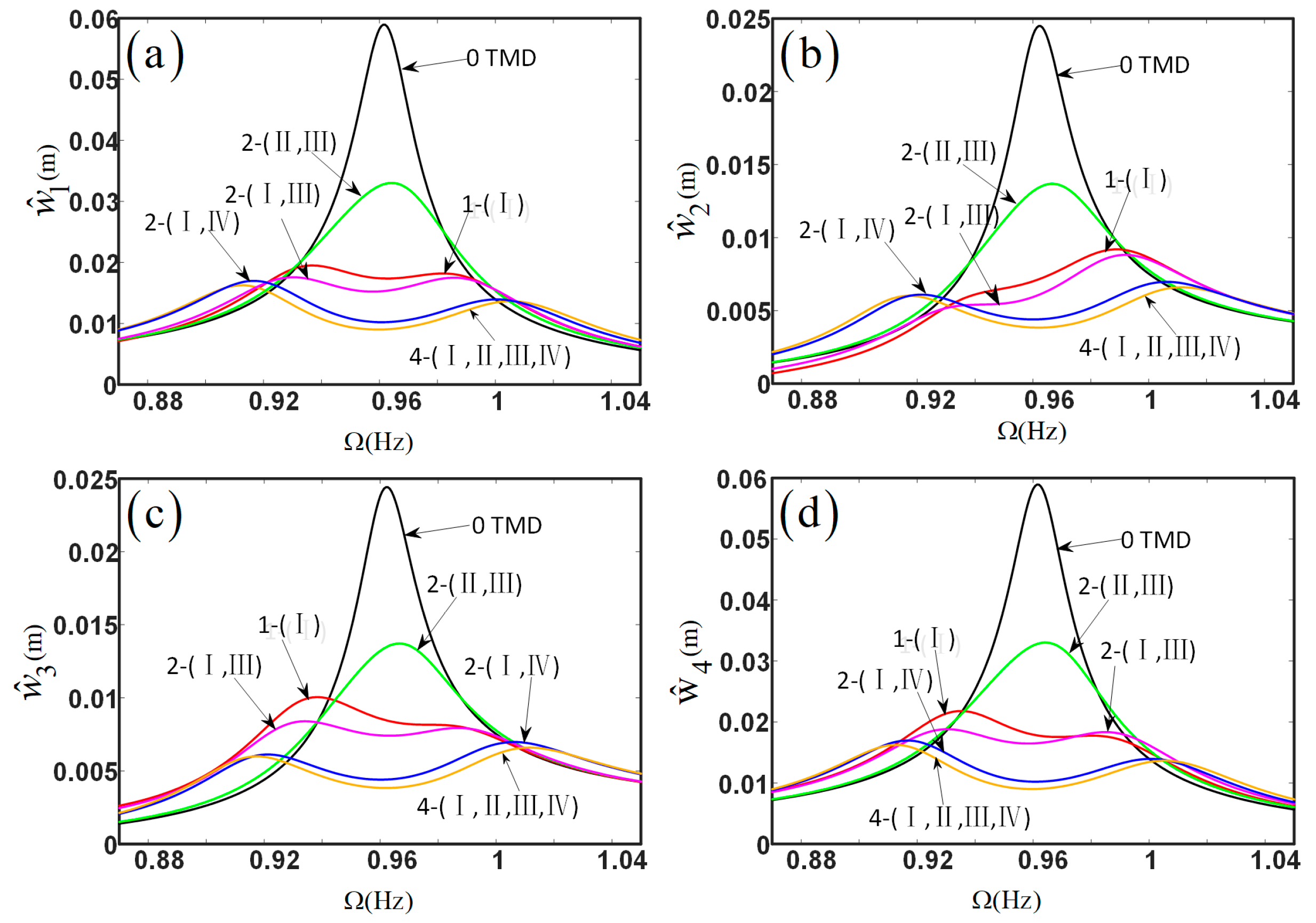
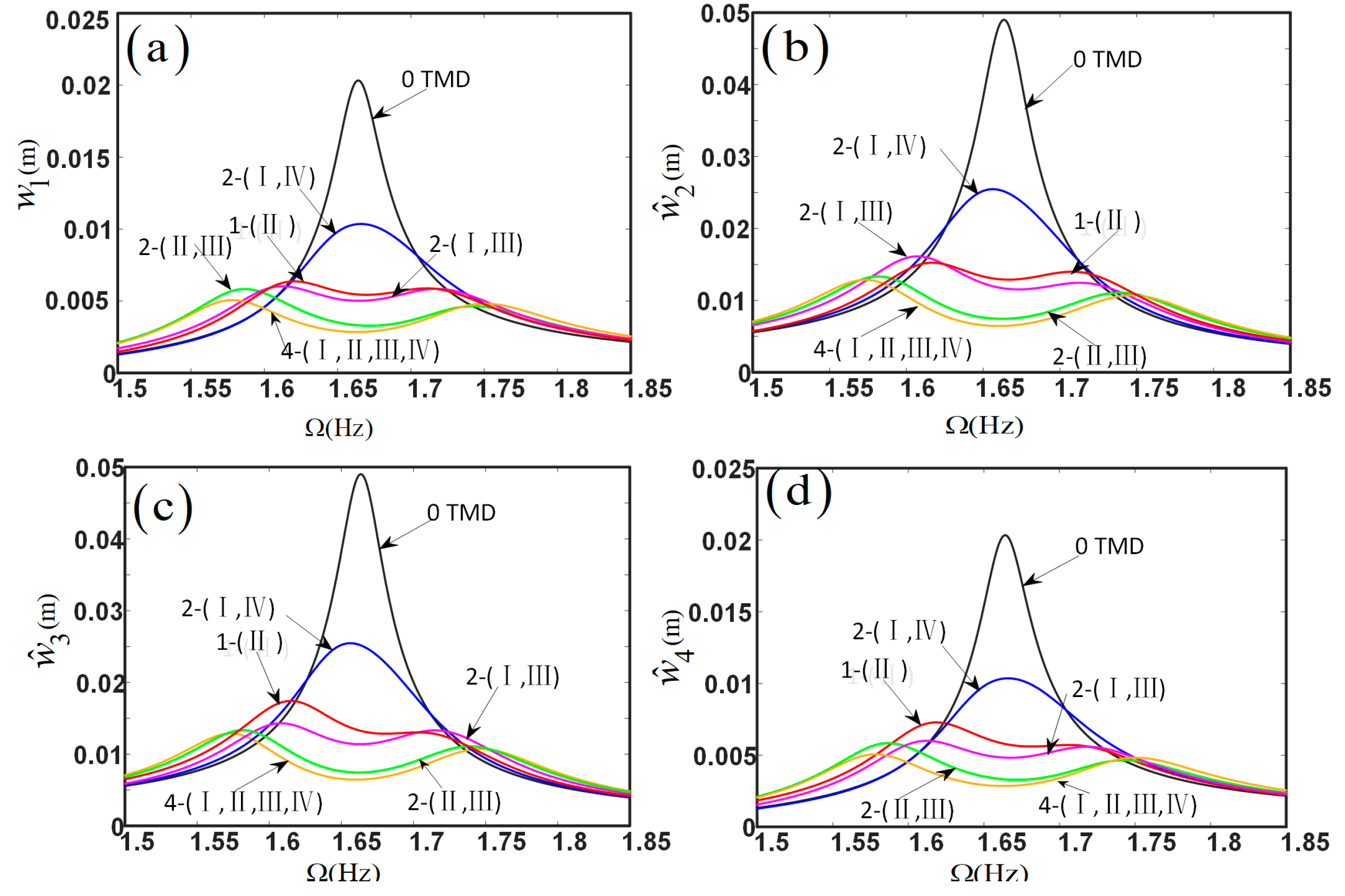
For the installation position of TMDs, the vibration suppression effect is closely related to the mode shape of the multi-span continuous bridge. When the TMD was installed at the point of maximum displacement in the mode shape of the bridge, its vibration suppression effect was the best, and the corresponding variation in the resonance frequency of the bridge was the largest.
- (2)
For the number of TMDs installed on a symmetrical multi-span continuous bridge, only one TMD needs to be installed at any point of maximum displacement in the mode shape of the bridge to have a good vibration suppression effect on the whole bridge. In this situation, when installing more TMDs at the other points of maximum displacement in the mode shape of the bridge, the improvement of the vibration reduction effect was not obvious.
In addition, the variable cross-section bridges are increasingly favored by long-span continuous multi-span bridges. In the future work, the method proposed in this paper will be applied to the dynamic modeling of continuous multi-span bridges with variable cross-sections.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}