
A Small Floating Platform Designed for Unmanned Defense System
Abstract
:1. Introduction
2. System Structural Design
2.1. Design Requirement
2.2. Structural Design
3. Methods
3.1. Motion Equation of Floating Platform
- Boundary conditions on the platform surface:
- Boundary conditions on the free surface:
- Radiation conditions:
- Infinite water depths meet:
3.2. The Motion Equation of the Floating Platform
3.3. Description of Waves
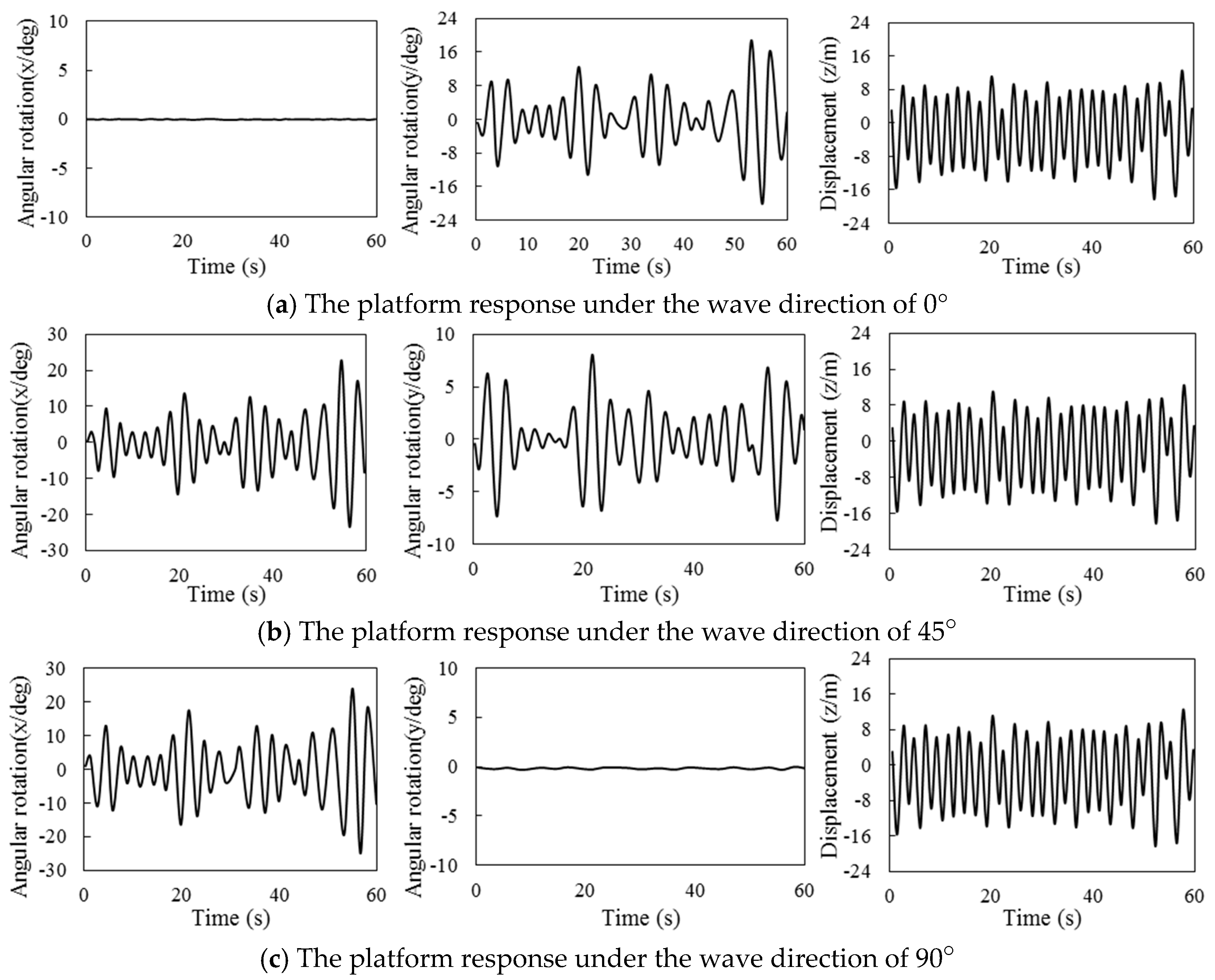
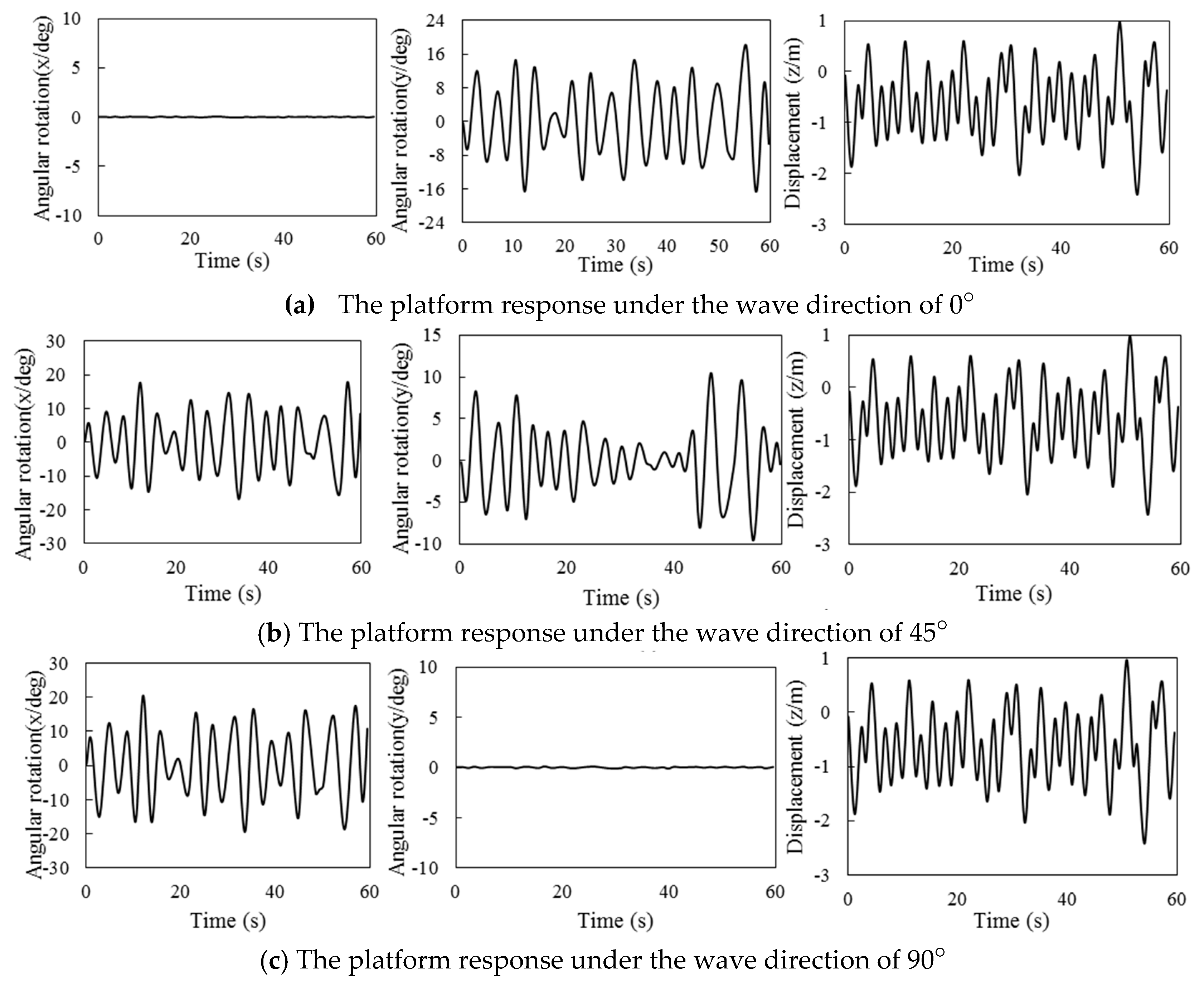
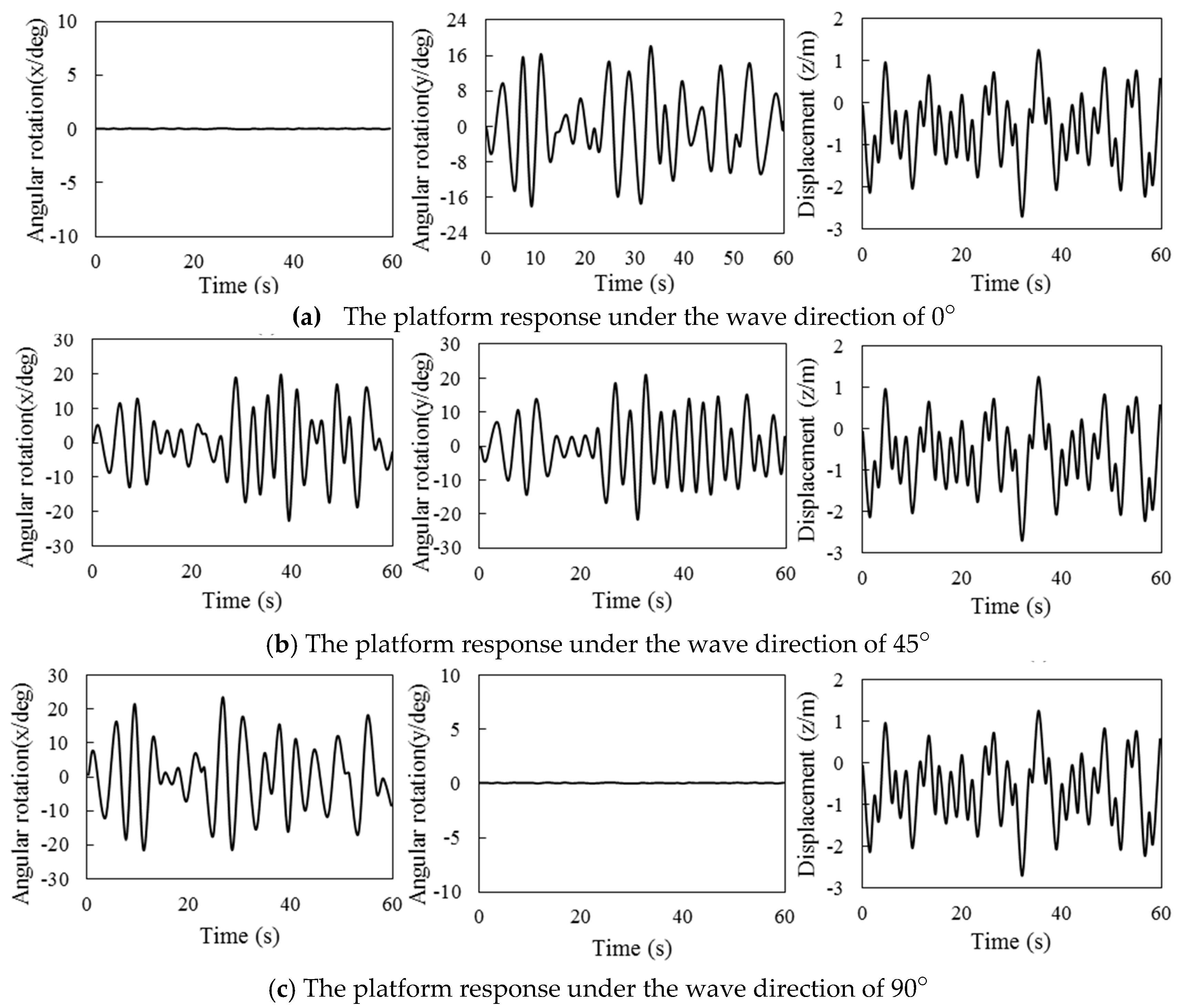
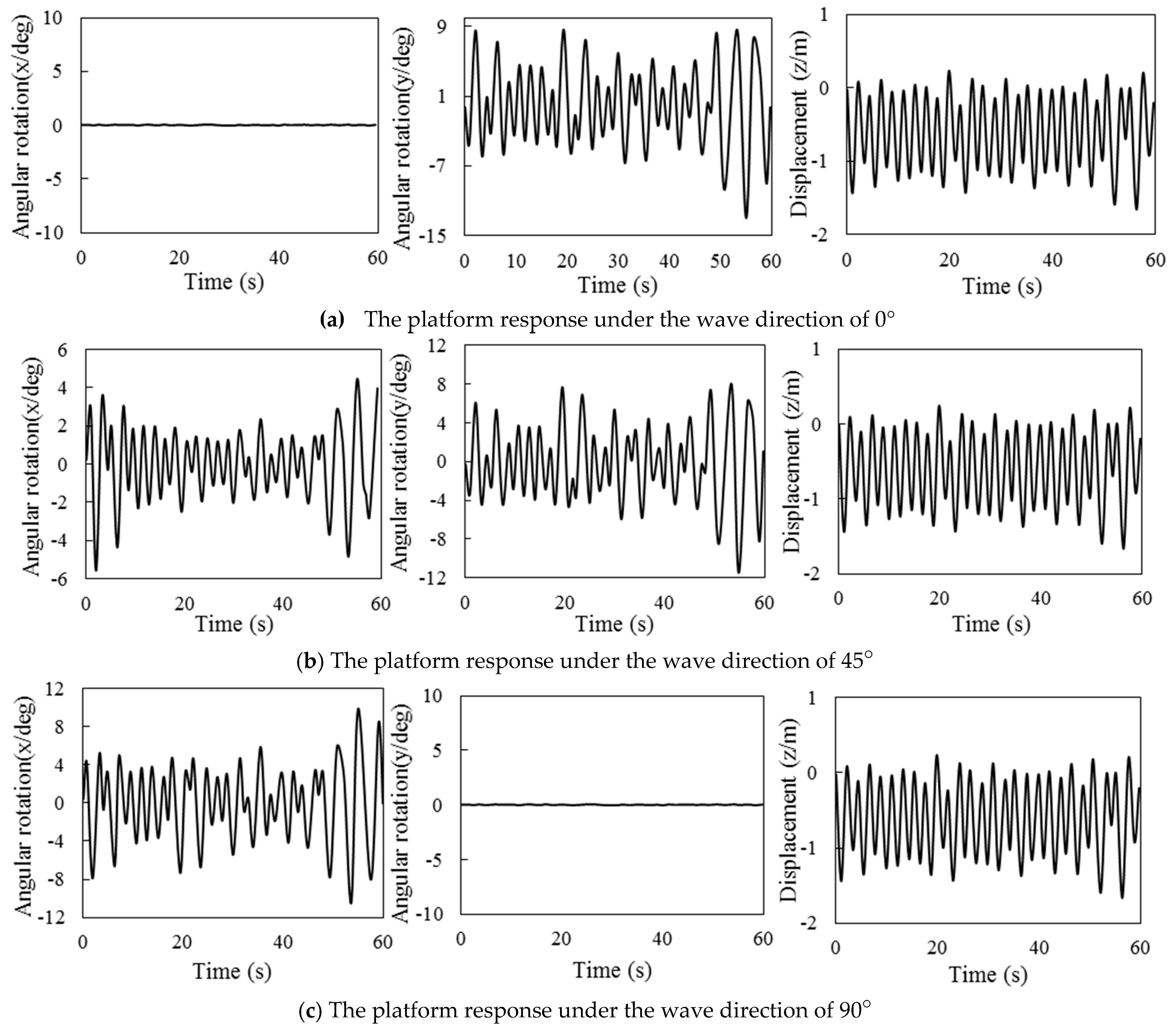
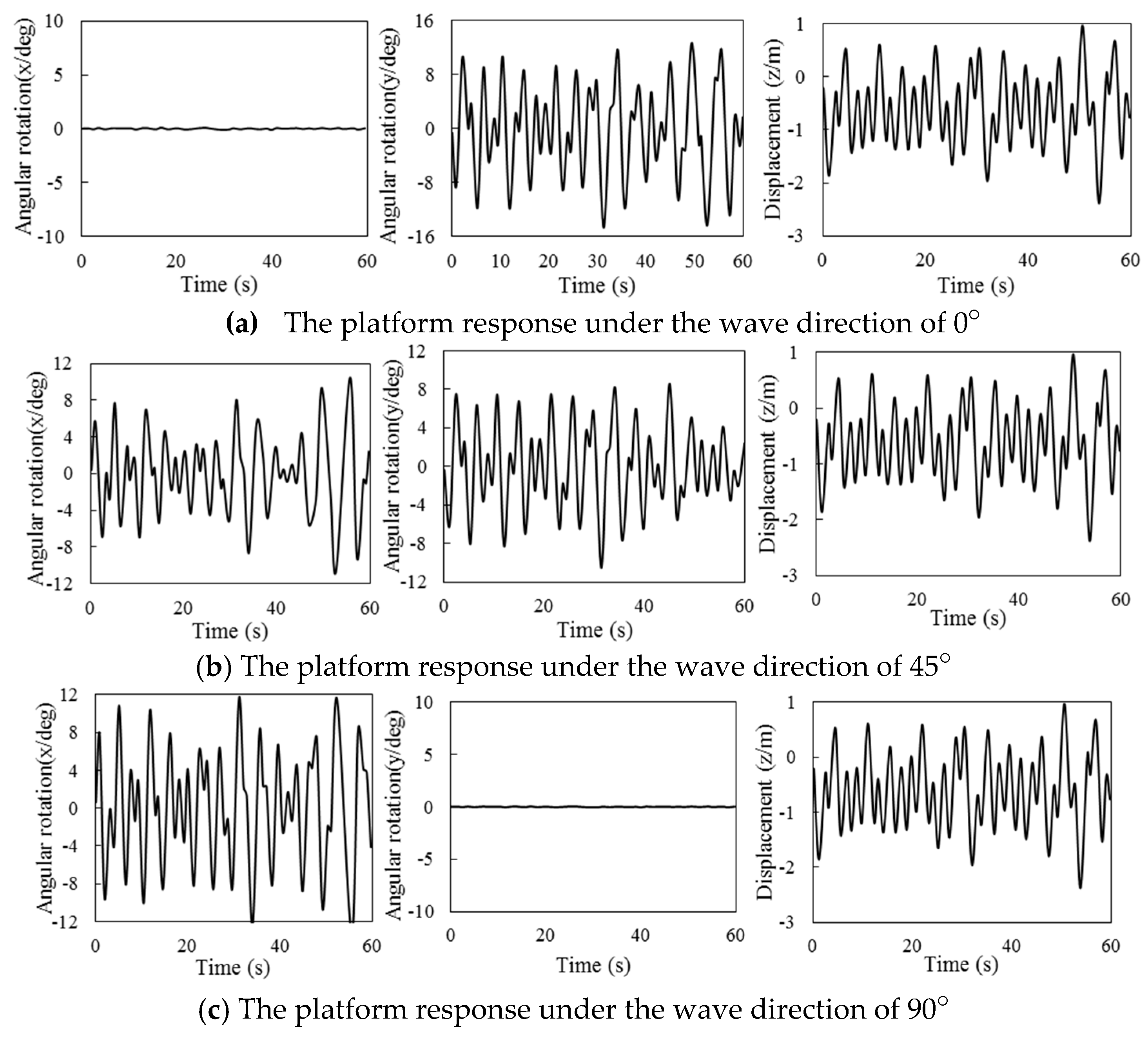
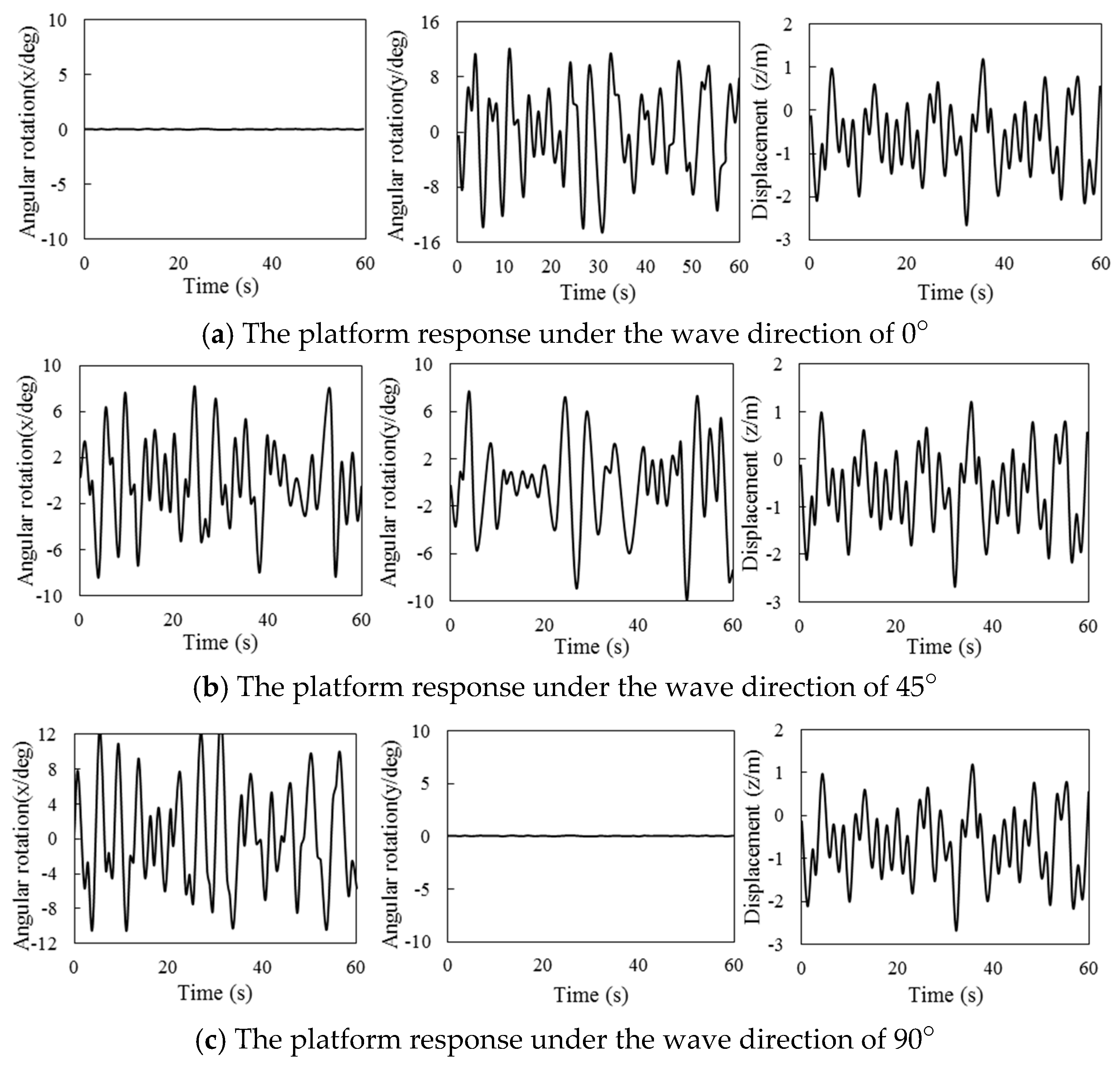
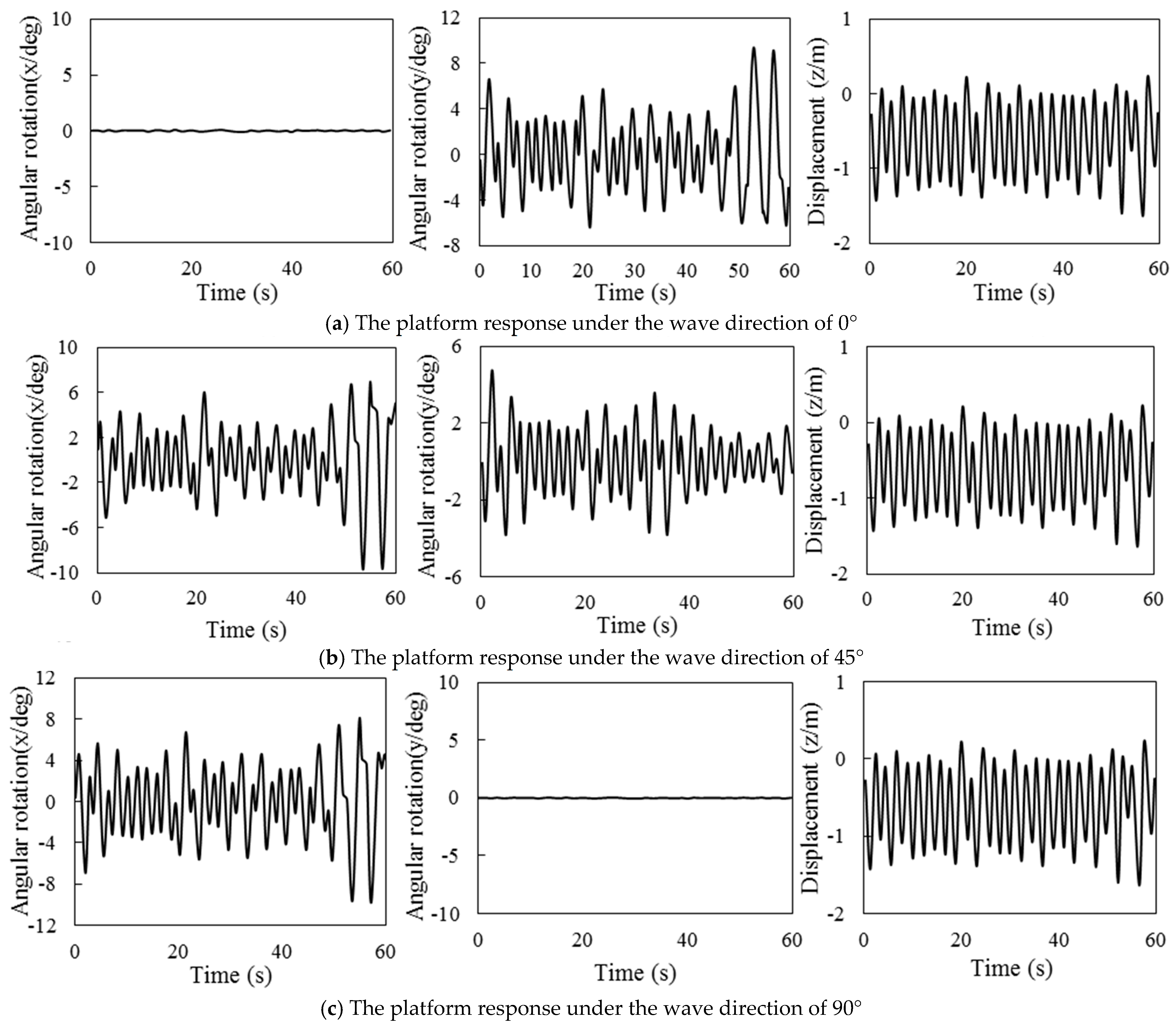
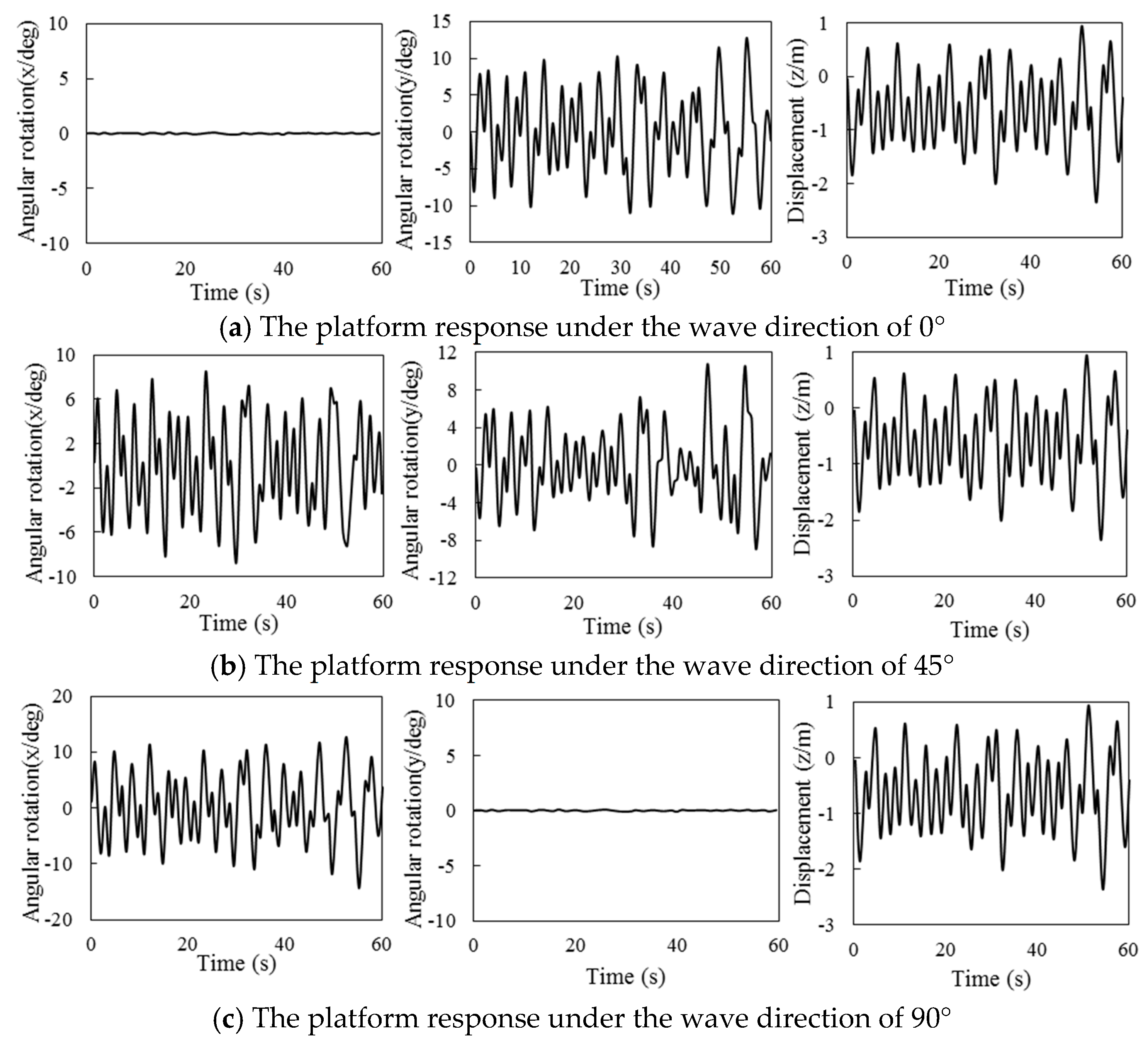
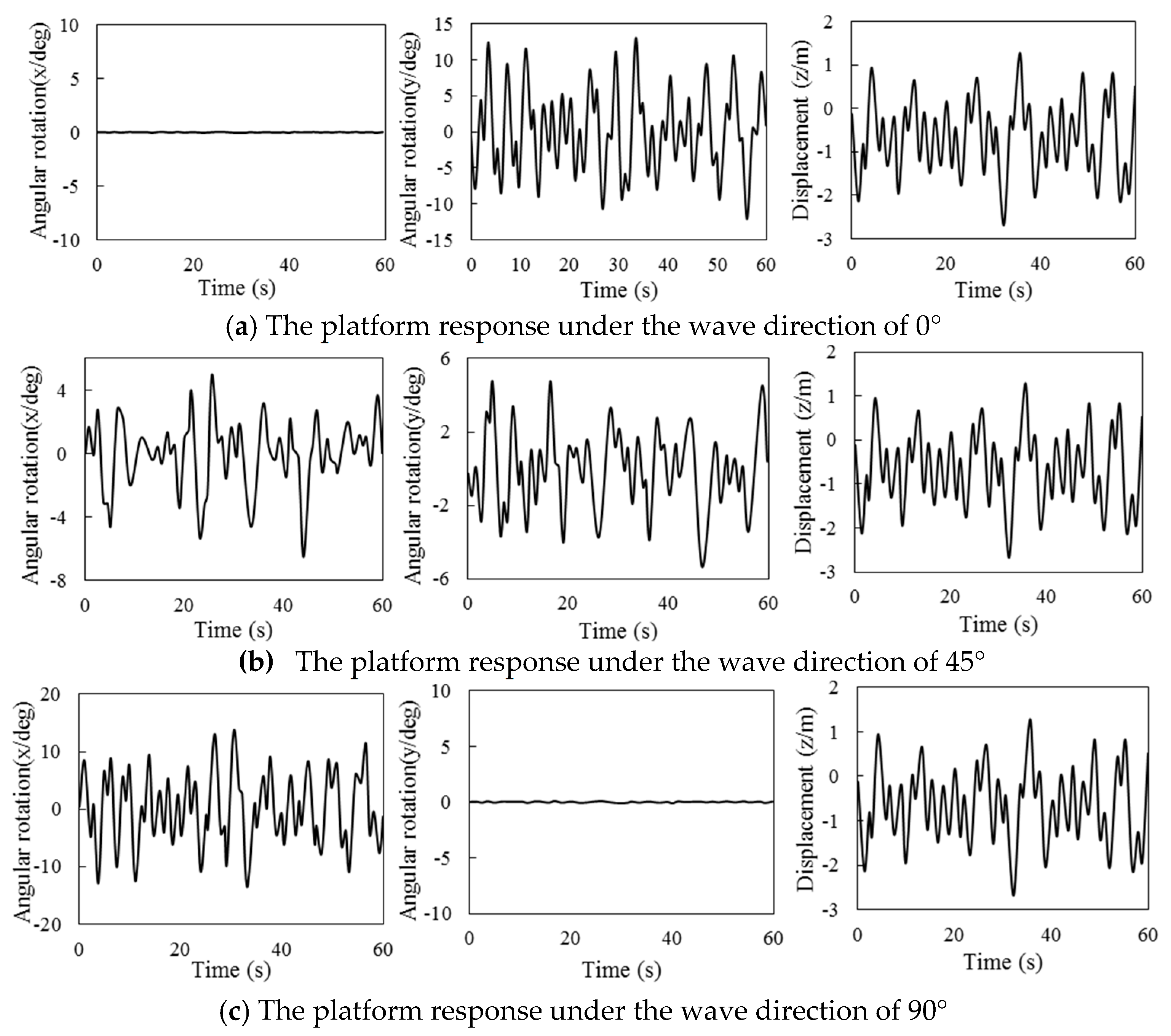
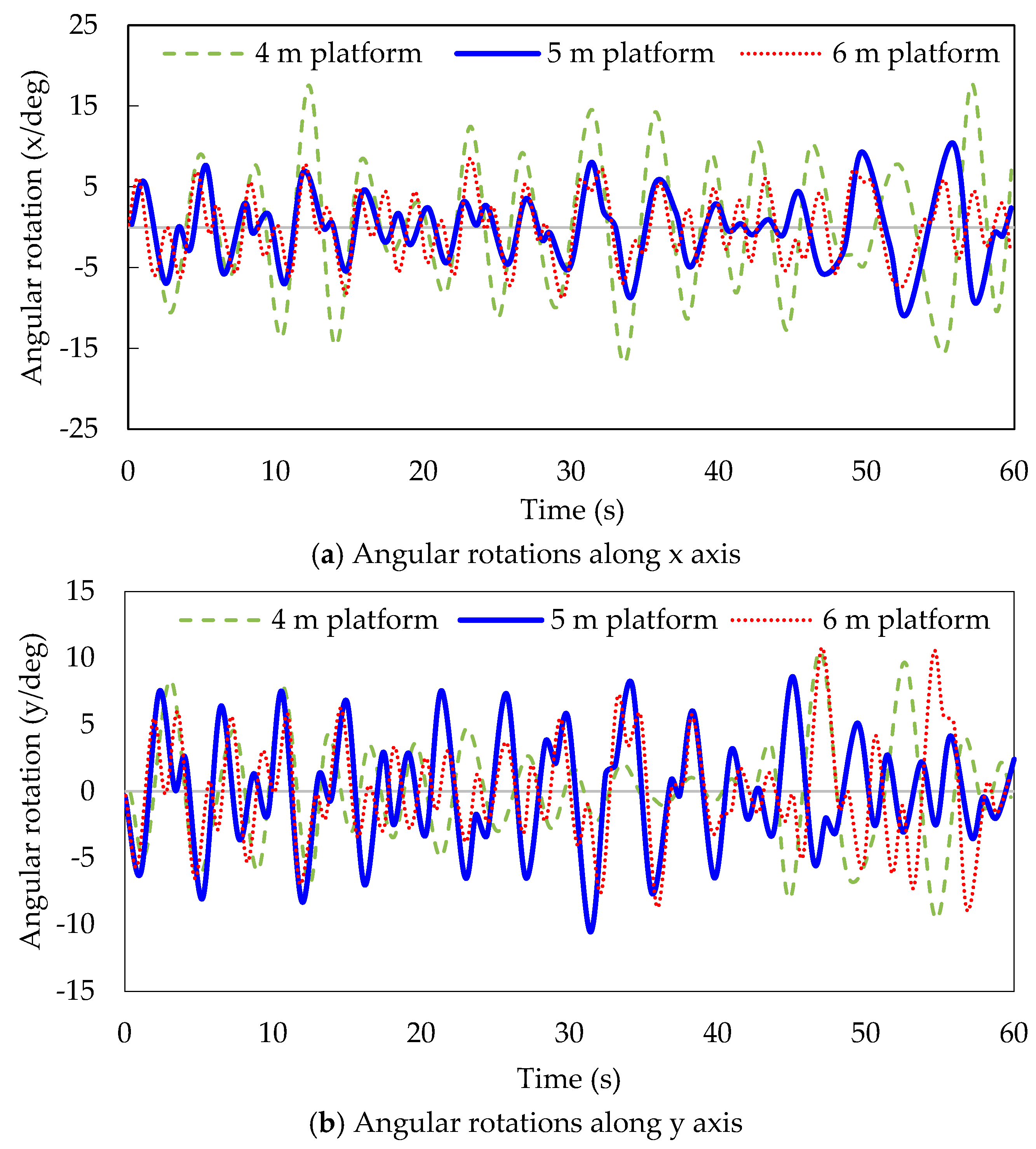
4. Simulation Results
4.1. Four-Meter Airbag in Different Wind-Sea Scales
4.2. Five-Meter Airbag in Different Wind-Sea Scales
4.3. Six-Meter Airbags in Different Wind-Sea Scales
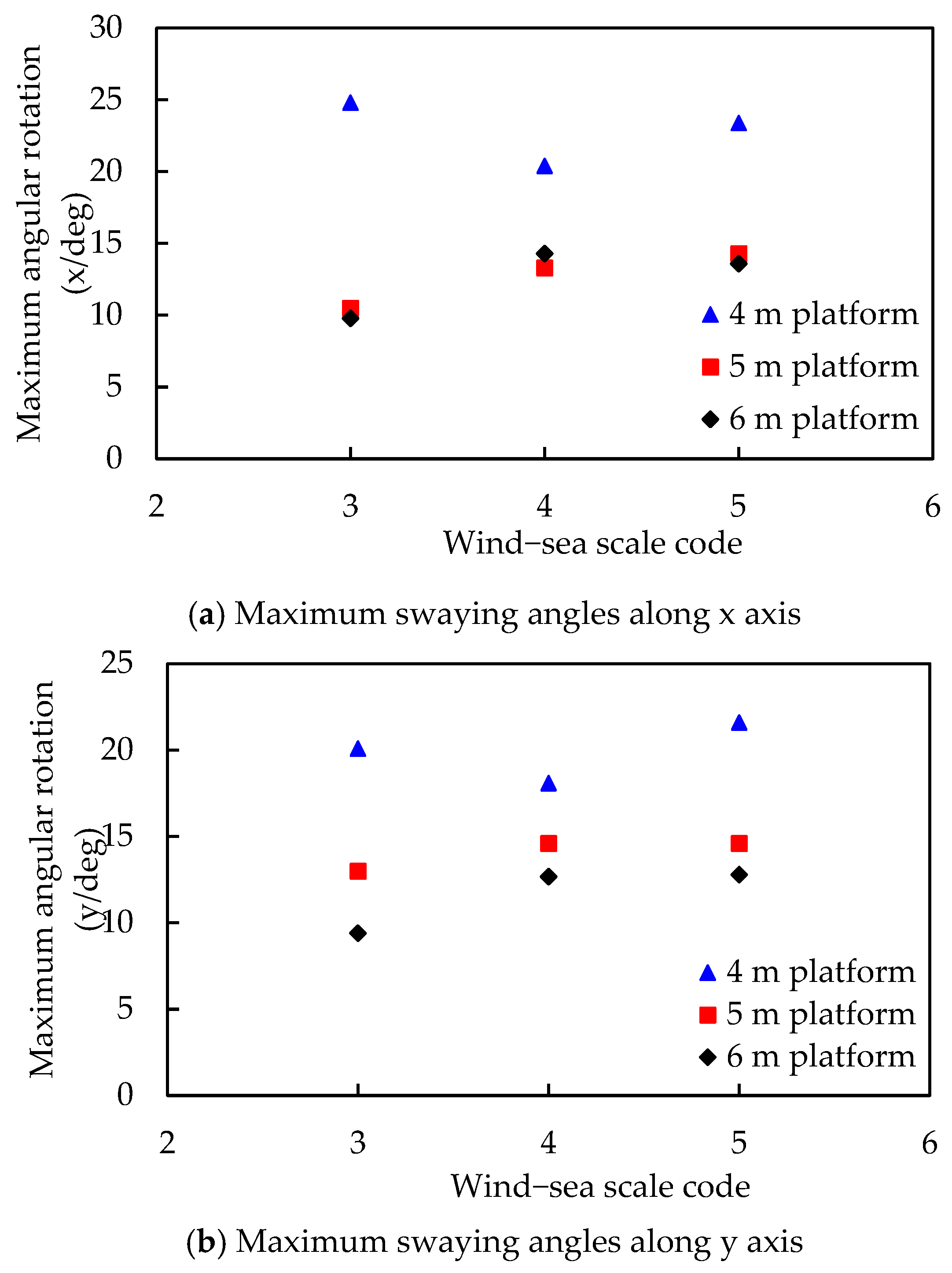
4.4. Result Discussion
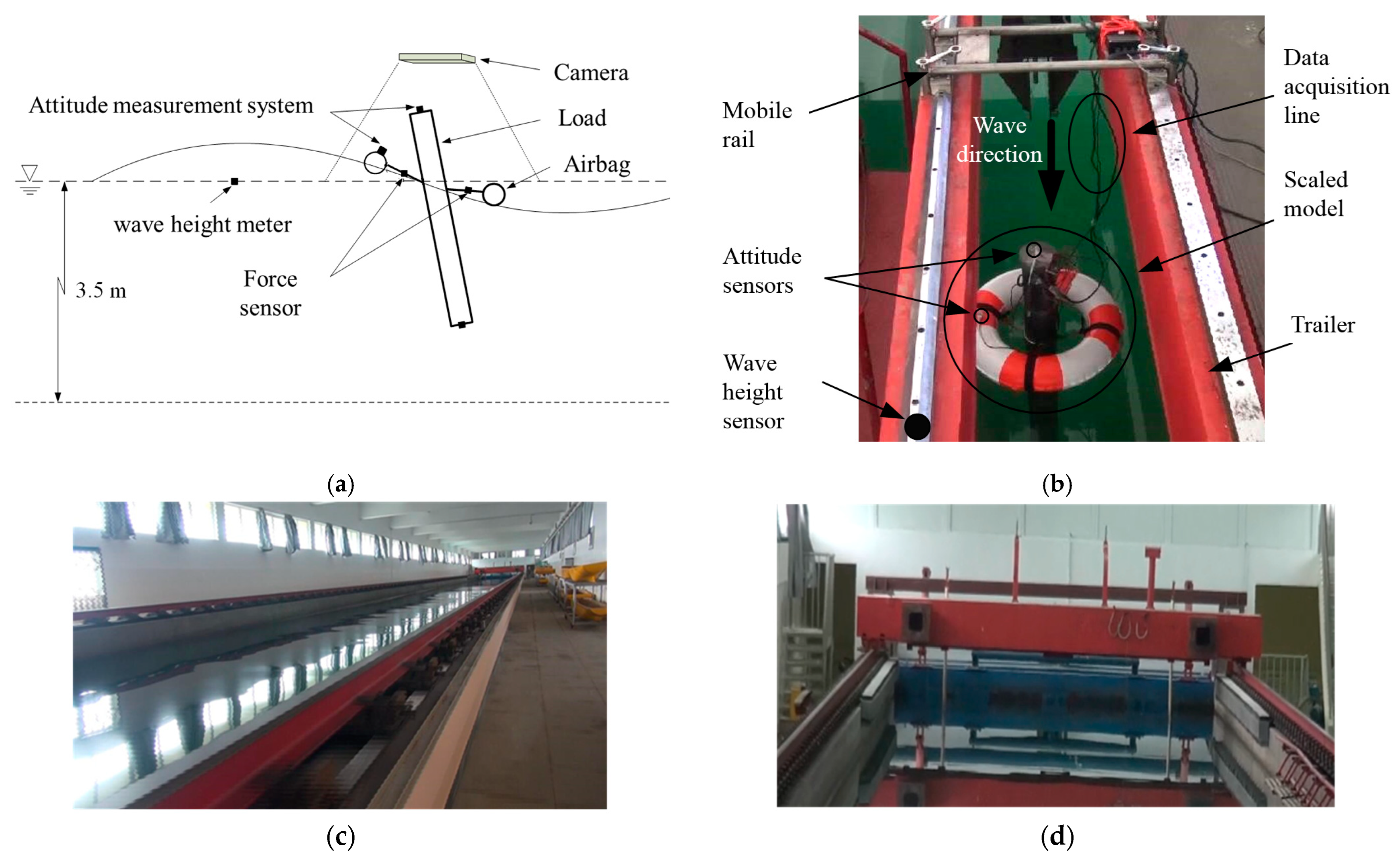
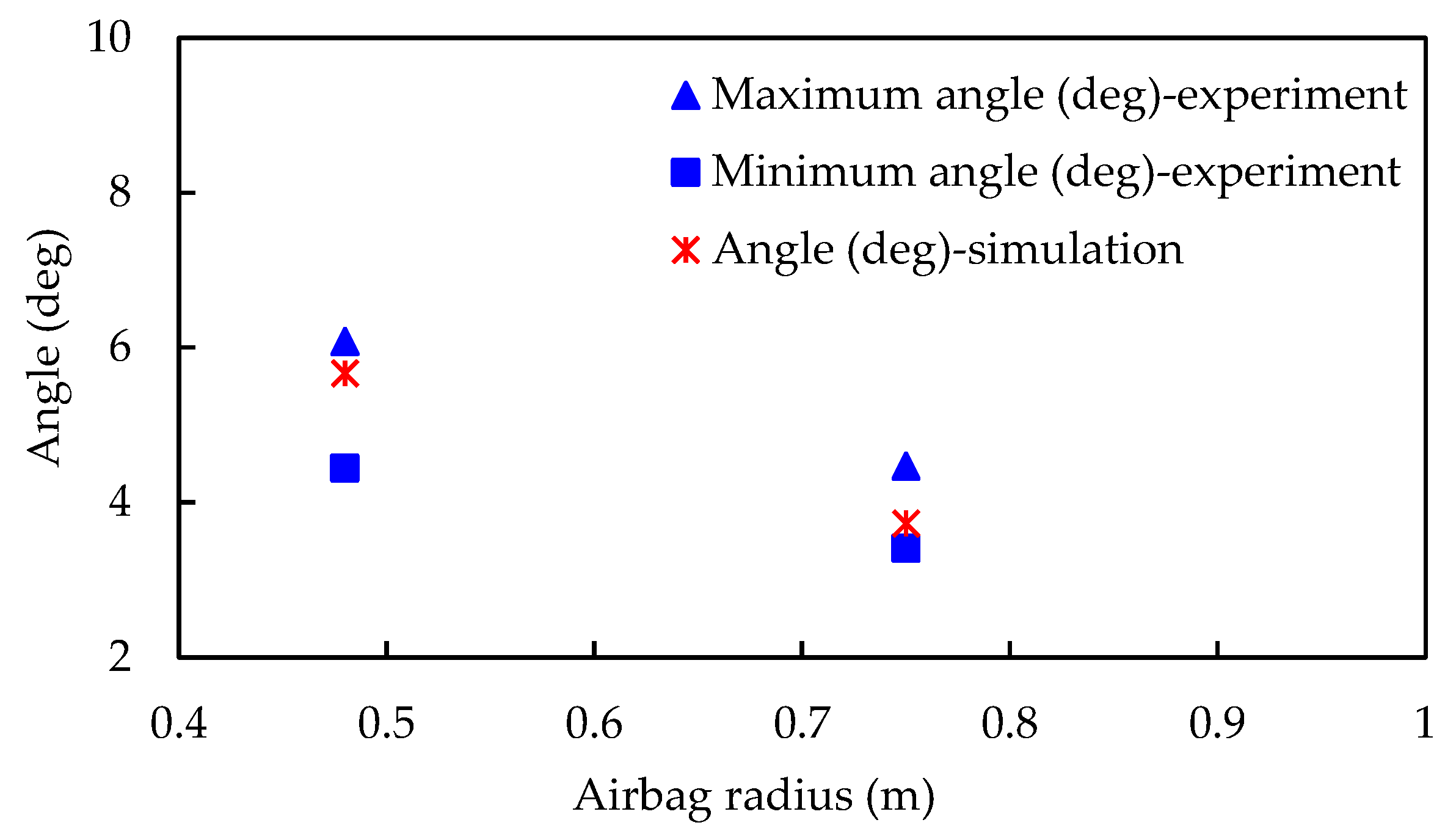
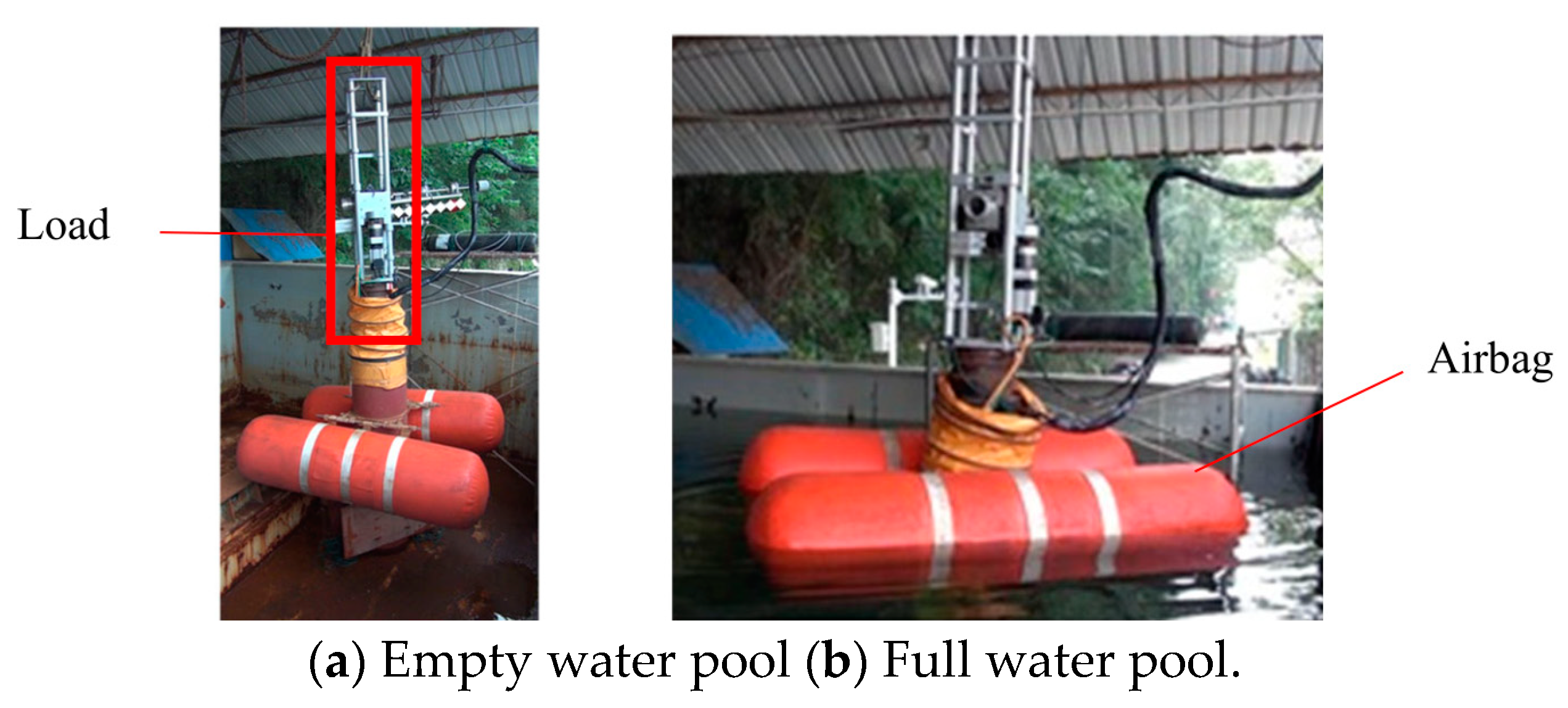
5. Test Results
5.1. Experimental Setup
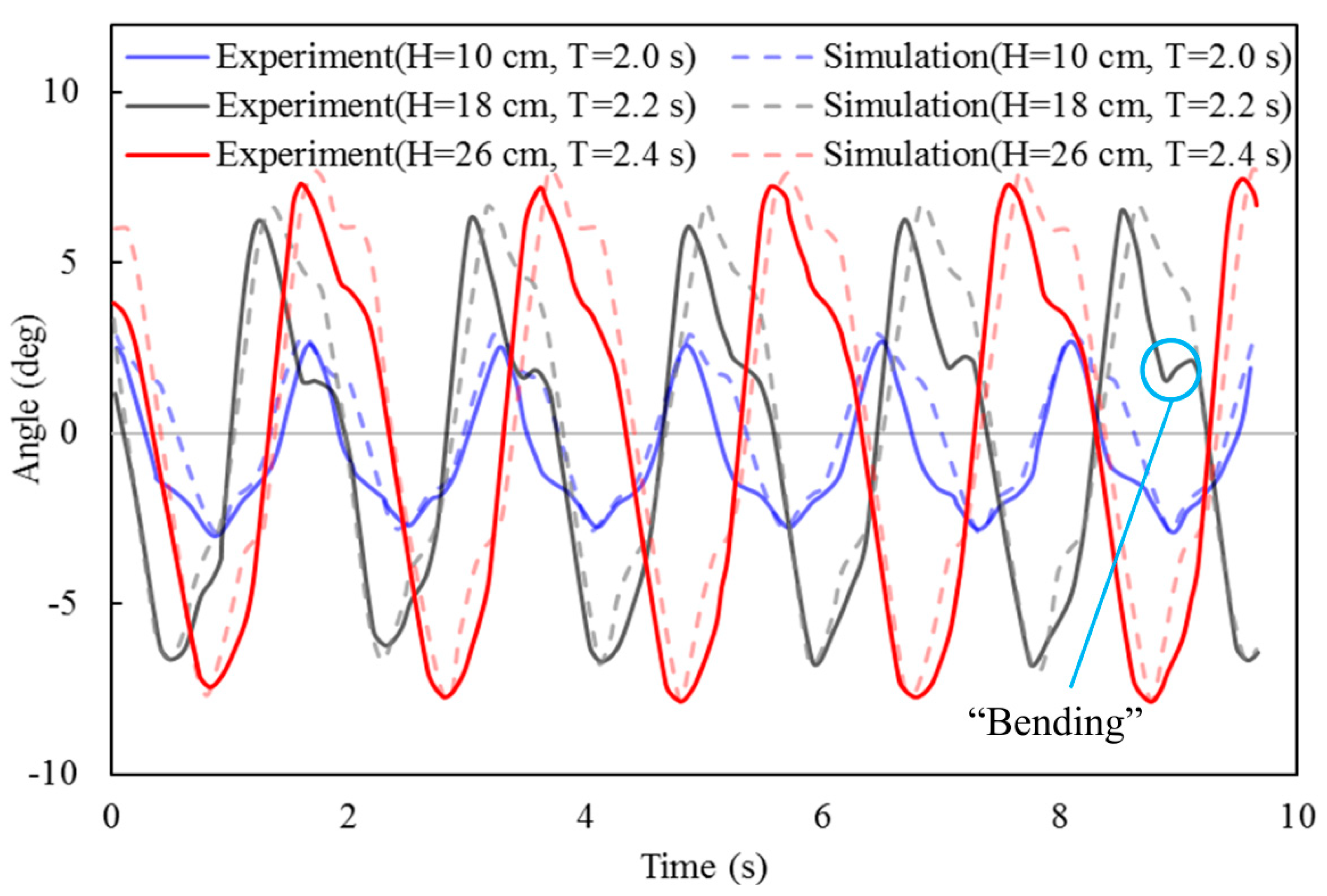
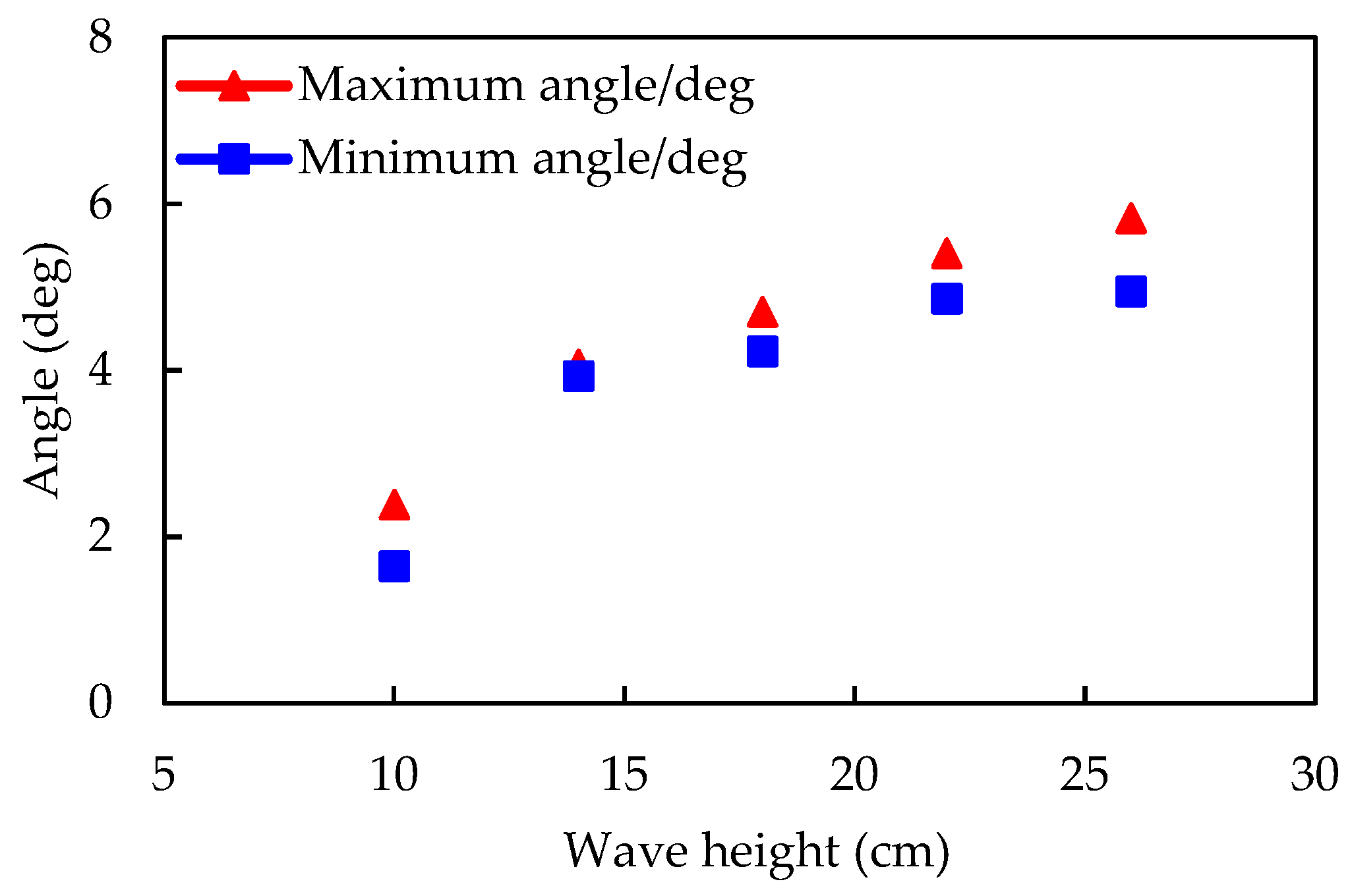
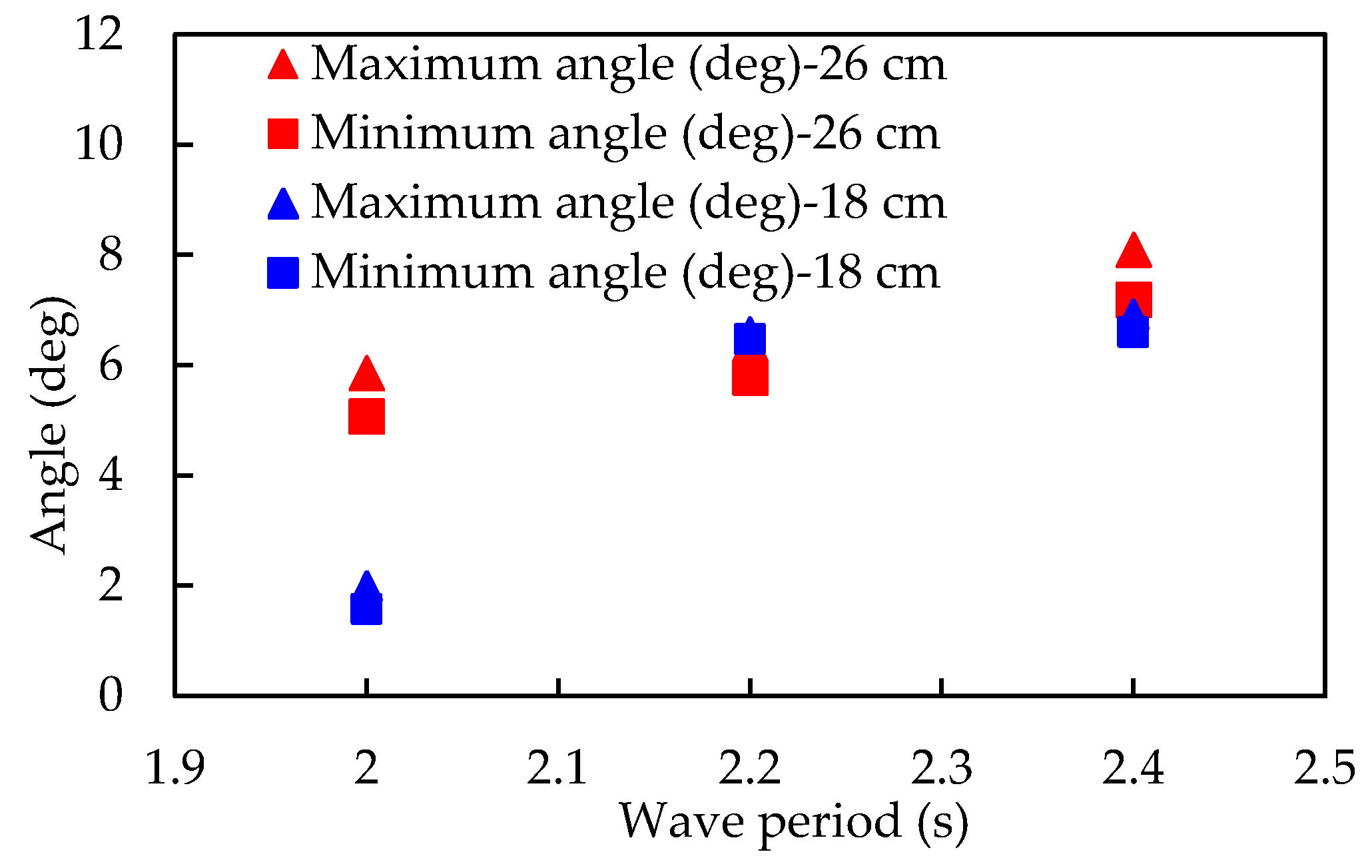
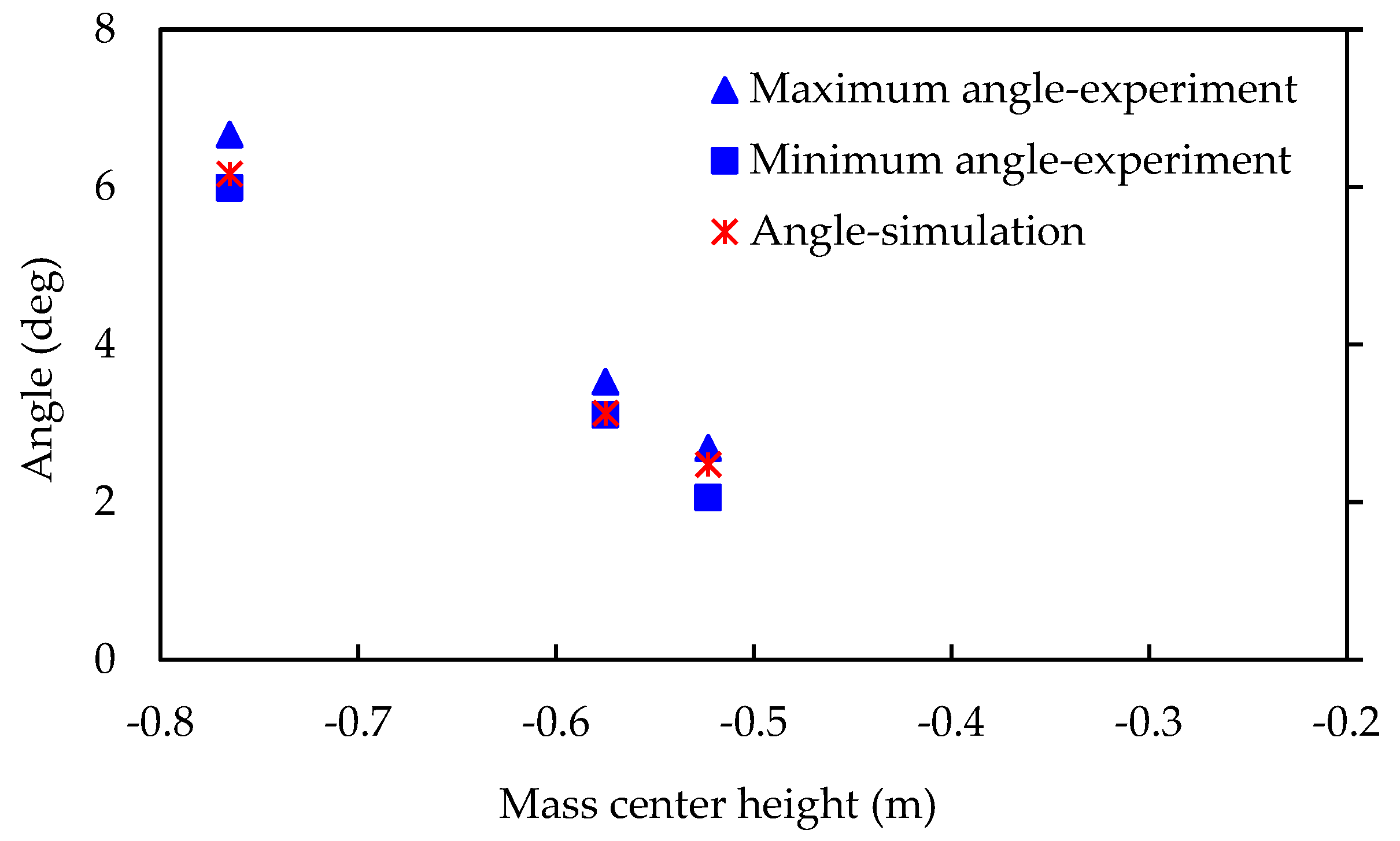
5.2. Test Results Analysis
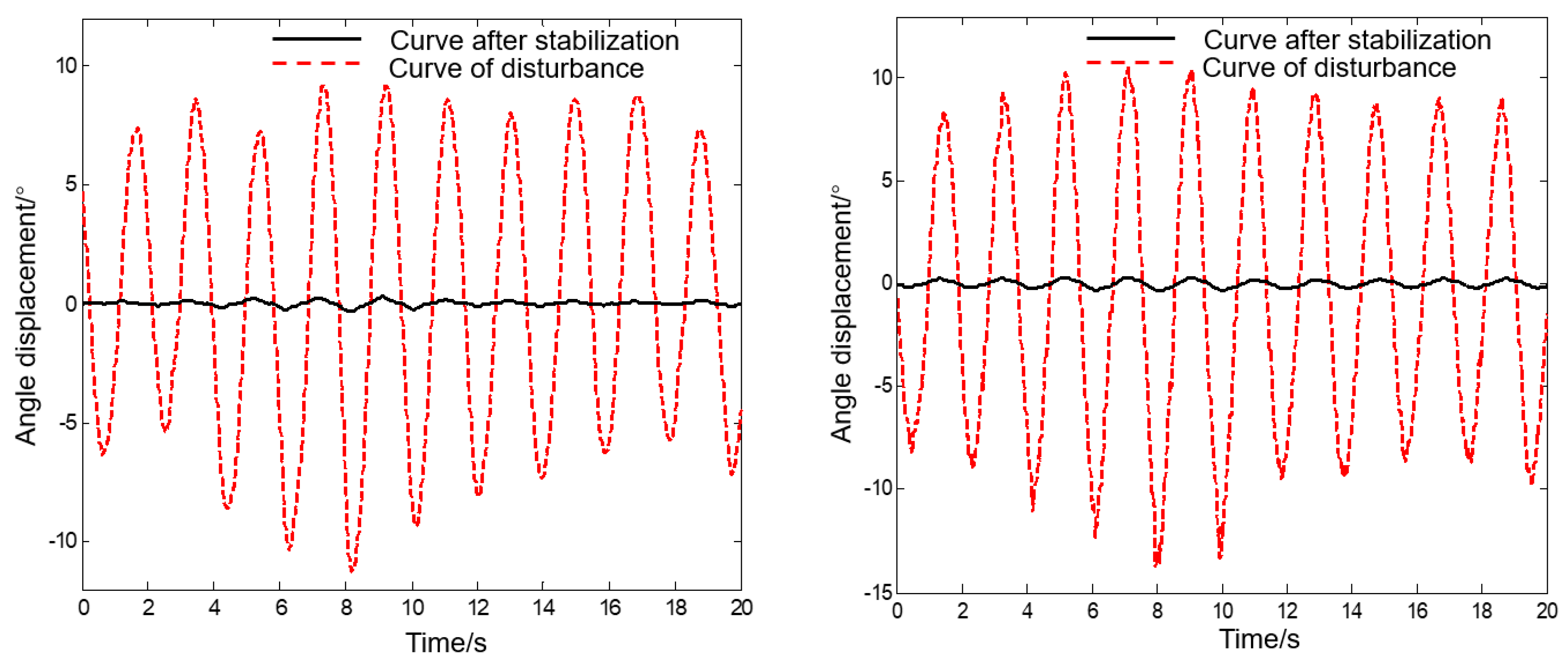
5.3. Stabilization Experiment in a Water Tank
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Q.A.; Maeda, T.; Kamada, Y.; Murata, J.; Kawabata, T.; Furukawa, K. Analysis of Aerodynamic Load on Straight-bladed Vertical Axis Wind Turbine. J. Therm. Sci. 2014, 23, 315–324. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Hu, S.; Xu, H.; Rasmussen, C.N. Review of energy storage system for wind power integration support. Appl. Energy 2015, 137, 545–553. [Google Scholar] [CrossRef]
- Borg, M.; Collu, M. Frequency-domain characteristics of aerodynamic loads of offshore floating vertical axis wind turbines. Appl. Energy 2015, 155, 629–636. [Google Scholar] [CrossRef]
- Gueydon, S.; Wuillaume, P.; Jonkman, J.; Robertson, A.; Platt, A. Comparison of Second-Order Loads on a Tension-Leg Platform for Wind Turbines (No. NREL/CP-5000-63840); National Renewable Energy Lab.(NREL): Golden, CO, USA, 2015.
- Bredmose, H.; Lemmer, F.; Borg, M.; Pegalajar-Jurado, A.; Mikkelsen, R.F.; Larsen, T.S.; Fjelstrup, T.; Yu, W.; Lomholt, A.K.; Boehm, L.; et al. The Triple Spar campaign: Model tests of a 10MW floating wind turbine with waves, wind and pitch control. Energy Procedia 2017, 137, 58–76. [Google Scholar] [CrossRef] [Green Version]
- Greco, M.; Lugni, C.; Faltinsen, O.M. Influence of motion coupling and nonlinear effects on parametric roll for a floating production storage and offloading platform. Philos. Trans. A Math. Phys. Eng. Sci. 2015, 373, 20140110. [Google Scholar] [CrossRef]
- Chen, Y.; Ye, J.; Zhang, X.; Liang, F. Experimental study on predictive control of stable platform system of shipborne helicopter. J. Dalian Marit. Univ. 2010, 36, 77–80. [Google Scholar]
- Cordle, A.; Jonkman, J. State of the Art in Floating Wind Turbine Design Tools (No. NREL/CP-5000-50543); National Renewable Energy Lab.(NREL): Golden, CO, USA, 2011.
- Tran, T.-T.; Kim, D.-H. The platform pitching motion of floating offshore wind turbine: A preliminary unsteady aerodynamic analysis. J. Wind. Eng. Ind. Aerodyn. 2015, 142, 65–81. [Google Scholar] [CrossRef] [Green Version]
- Chakrabarti, S. Handbook of Offshore Engineering (2-Volume Set); Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Hilkert, J. Inertially stabilized platform technology concepts and principles. IEEE Control Syst. Mag. 2008, 28, 26–46. [Google Scholar]
- Li, H.W.; Xu, Z.D.; Wang, F.; Gai, P.P.; Gomez, D.; Dyke, S.J. Development and Validation of a Nonlinear Model to Describe the Tension–Compression Behavior of Rubber-Like Base Isolators. J. Eng. Mech. 2023, 149, 04022104. [Google Scholar] [CrossRef]
- Li, Q.Q.; Xu, Z.D.; Dong, Y.R.; He, Z.H.; He, J.X.; Yan, X. Hyperelastic Hybrid Molecular Chain Model of Thermal-Oxidative Aging Viscoelastic Damping Materials Based on Physical–Chemical Process. J. Eng. Mech. 2023, 149, 04022099. [Google Scholar] [CrossRef]
- Dai, J.; Xu, Z.D.; Gai, P.P.; Hu, Z.W. Optimal design of tuned mass damper inerter with a Maxwell element for mitigating the vortex-induced vibration in bridges. Mech. Syst. Signal Process. 2021, 148, 107180. [Google Scholar] [CrossRef]
- Xu, Z.D.; Yang, Y.; Miao, A.N. Dynamic analysis and parameter optimization of pipelines with multidimensional vibration isolation and mitigation device. J. Pipeline Syst. Eng. Pract. 2021, 12, 04020058. [Google Scholar] [CrossRef]
- Yingzhong Liu, G.L. The Theory of Motion of a Ship on Waves, 1st ed.; Shanghai Jiao Tong University Press: Shanghai, China, 1987. [Google Scholar]
- Korvin-Kroukovsky, B.V.; Jacobs, W.R. Pitching and Heaving Motions of a Ship in Regular Waves; Experimental Towing TANK: Hoboken, NJ, USA; Stevens Institute of Technology: Hoboken, NJ, USA, 1957; Volume 659. [Google Scholar]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-art research on motion control of maritime autonomous surface ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.-S. Review on ship motion control. J. Traffic Transp. Eng. 2003, 3, 34–39. [Google Scholar]
- Kim, Y.; Shin, Y.S.; Lin, W.M.; Yue, D.K.P. September. Study on sloshing problem coupled with ship motion in waves. In Proceedings of the 8th International Conference on Numerical Ship Hydrodynamics, Busan, Republic of Korea, 22–25 September 2003. [Google Scholar]
- Bishop RE, D.; Price, W.G. An investigation into the linear theory of ship response to waves. J. Sound Vib. 1979, 62, 353–363. [Google Scholar] [CrossRef]
- Crippa, G.; Nobili, C.; Seis, C.; Spirito, S. Eulerian and Lagrangian Solutions to the Continuity and Euler Equations with L^1 Vorticity. SIAM J. Math. Anal. 2017, 49, 3973–3998. [Google Scholar] [CrossRef] [Green Version]
- Martelli, M.; Viviani, M.; Altosole, M.; Figari, M.; Vignolo, S. Numerical modelling of propulsion, control and ship motions in 6 degrees of freedom. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 373–397. [Google Scholar] [CrossRef]
- Benetazzo, A. Accurate measurement of six degree of freedom small-scale ship motion through analysis of one camera images. Ocean. Eng. 2011, 38, 1755–1762. [Google Scholar] [CrossRef]
- Lee, S.; You, J.M.; Lee, H.H.; Lim, T.; Park, S.T.; Seo, J.; Rhee, K.P. Experimental study on the six degree-of-freedom motions of a damaged ship floating in regular waves. IEEE J. Ocean. Eng. 2015, 41, 40–49. [Google Scholar]
- Suzuki, R.; Ueno, M.; Tsukada, Y. Numerical simulation of 6-degrees-of-freedom motions for a manoeuvring ship in regular waves. Appl. Ocean. Res. 2021, 113, 102732. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, Y.; Jin, Y. 6-DOF mathematical model of ship motion in regular waves. J. Traffic Transp. Eng. 2007, 7, 4. [Google Scholar]
- Mousaviraad, S.M.; Carrica, P.M.; Stern, F. Development and validation of harmonic wave group single-run procedure for RAO with comparison to regular wave and transient wave group procedures using URANS. Ocean. Eng. 2010, 37, 653–666. [Google Scholar] [CrossRef]
- Gervelas, R.; Trarieux, F.; Patel, M. A time-domain simulator for an oscillating water column in irregular waves at model scale. Ocean. Eng. 2011, 38, 1007–1013. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WMO Wind-Sea Scale Code | Characteristics | Wave Height (m) |
|---|---|---|
| 0 | Calm (Glassy) | 0 |
| 1 | Calm (Rippled) | <0.1 |
| 2 | Smooth (Wavelets) | 0.1–0.5 |
| 3 | Slight | 0.5–1.25 |
| 4 | Moderate | 1.25–2.5 |
| 5 | Rough | 2.5–4 |
| Conditions | Period (s) | Height (cm) |
|---|---|---|
| 1 | 2 | 10 |
| 2 | 2 | 14 |
| 3 | 2 | 18 |
| 4 | 2 | 22 |
| 5 | 2 | 26 |
| 6 | 2.2 | 18 |
| 7 | 2.4 | 18 |
| 8 | 2.2 | 26 |
| 9 | 2.4 | 26 |
| 10 | 2.2 | 18 |
| 11 | 2.2 | 18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, Z.; Xie, K.; Zhao, F.; Li, J.; Li, Y. A Small Floating Platform Designed for Unmanned Defense System. J. Mar. Sci. Eng. 2023, 11, 278. https://doi.org/10.3390/jmse11020278
Mo Z, Xie K, Zhao F, Li J, Li Y. A Small Floating Platform Designed for Unmanned Defense System. Journal of Marine Science and Engineering. 2023; 11(2):278. https://doi.org/10.3390/jmse11020278
Chicago/Turabian StyleMo, Zonglai, Kefeng Xie, Fengcheng Zhao, Jun Li, and Yanjun Li. 2023. "A Small Floating Platform Designed for Unmanned Defense System" Journal of Marine Science and Engineering 11, no. 2: 278. https://doi.org/10.3390/jmse11020278