
3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law

Abstract
:1. Introduction
- Design of robust optimal control algorithm is explored for an uncertain polytopic AURV system in a 3D plane using an LMI approach.
- Uncertain hydrodynamic parameters are selected to form a polytopic AURV system by proposing a novel technique.
- Tracking of the desired depth and the path following by AURV is employed using the backstepping approach in a 3D plane in terms of the Serret-Frenet (SF) frame.
- A robust behavior is highlighted to show the efficiency of the proposed control algorithm.
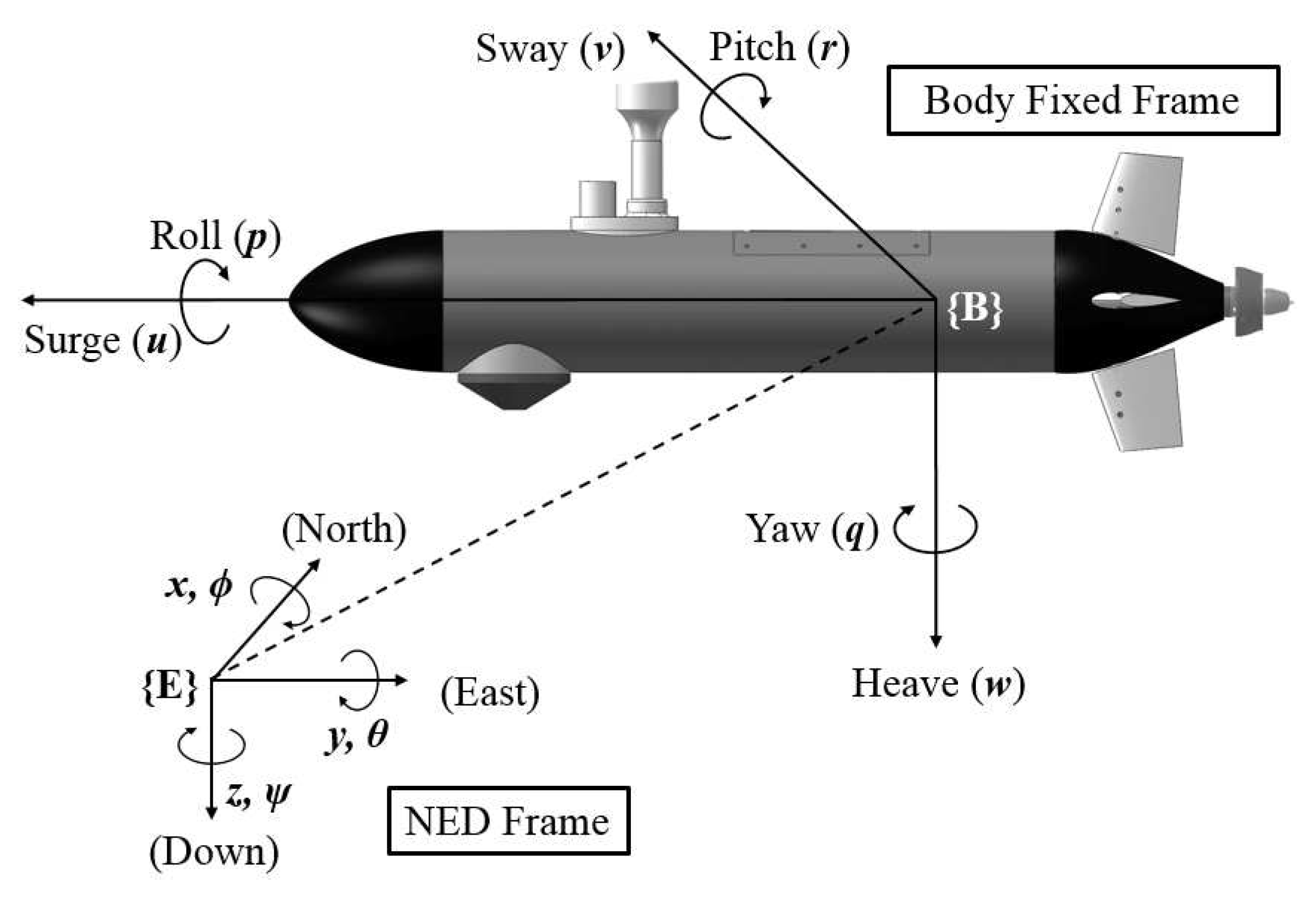
2. Problem Formulation in 3D Plane
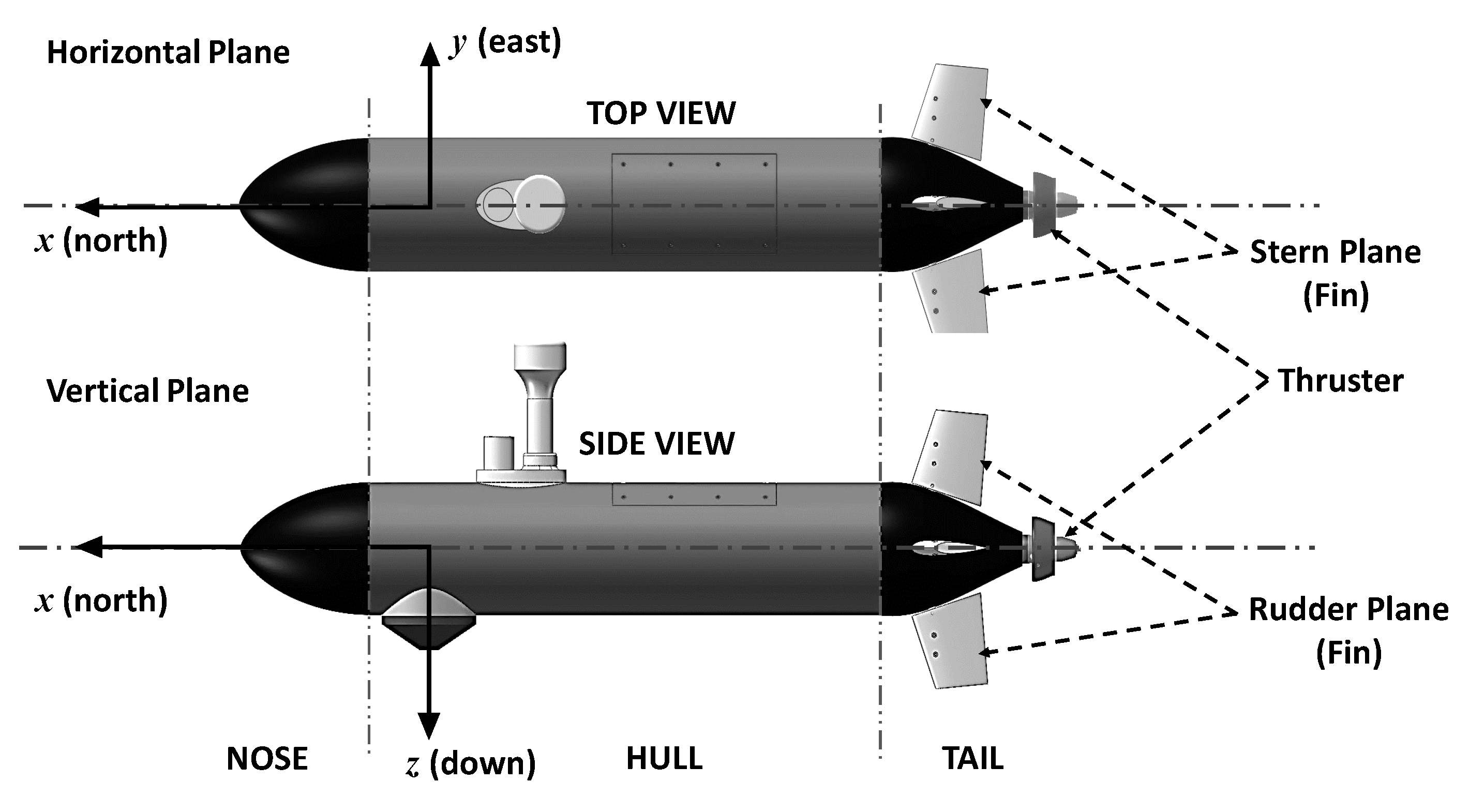
2.1. AURV Modeling in Vertical Plane
2.2. AURV Modeling in Horizontal Plane
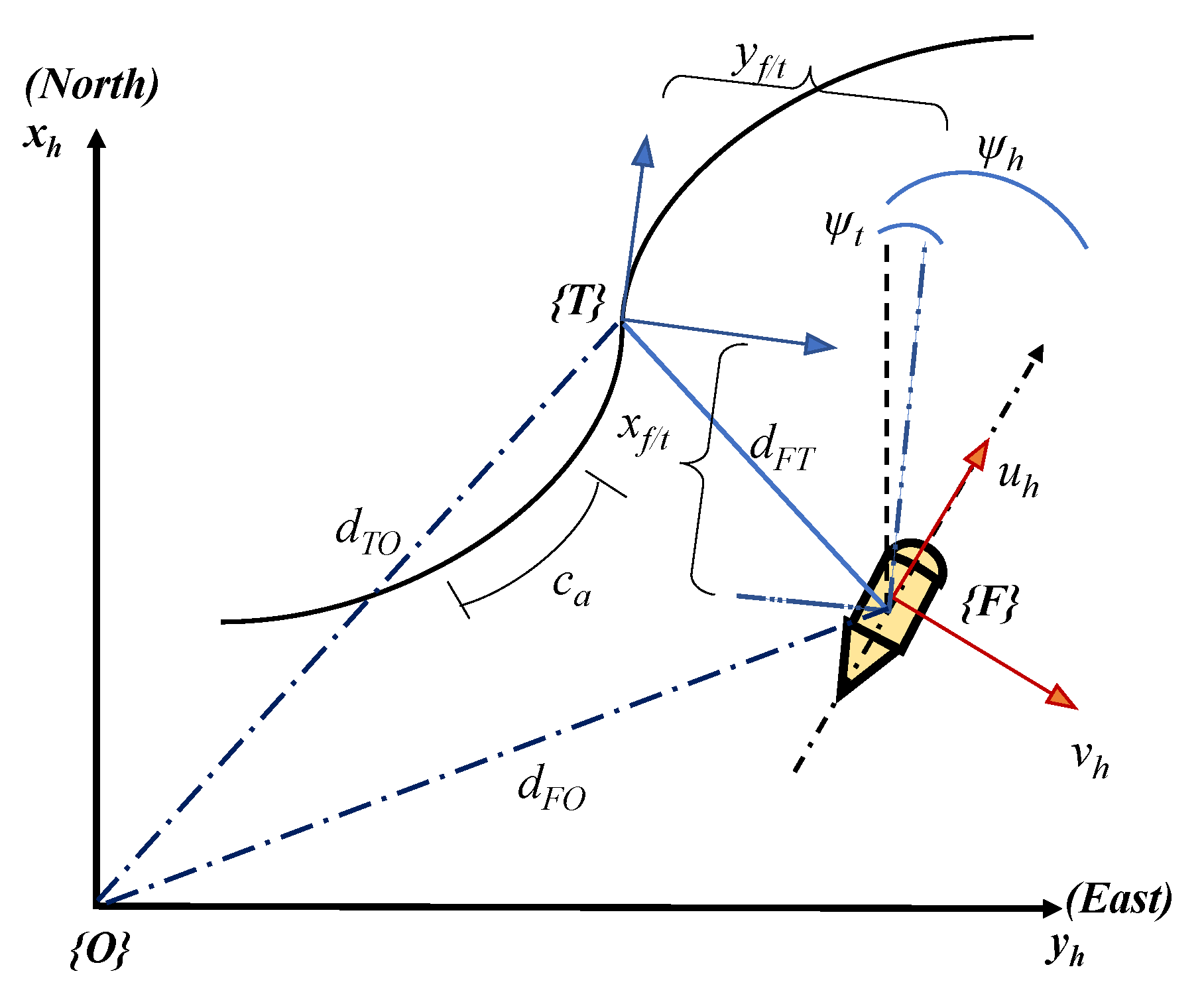
2.3. Path Following Kinematics: Serret-Frenet Frame
2.4. Problem Statement
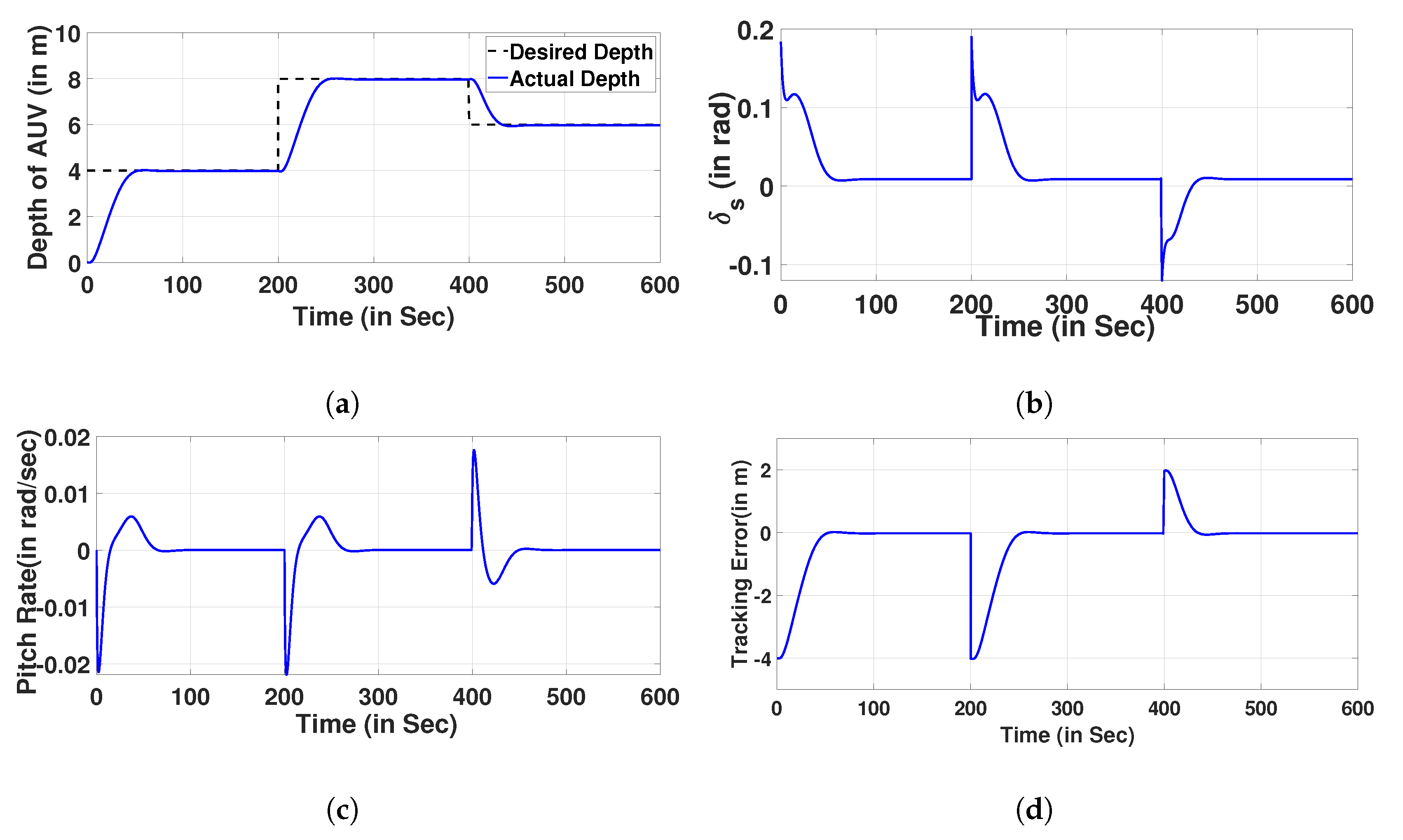
- The desired depth is achieved by minimizing the depth error, i.e.,where . It is intended to design a backstepping control algorithm to achieve an Equation (21).
- Subsequently, a desired pitch angle is achieved by reducing the pitch orientation error to zero, i.e.,where . As a cascaded structure is adopted in the control structure, the desired pitch angle is generated by the backstepping approach. In this, an optimal robust control strategy is designed to achieve the Equation (22).
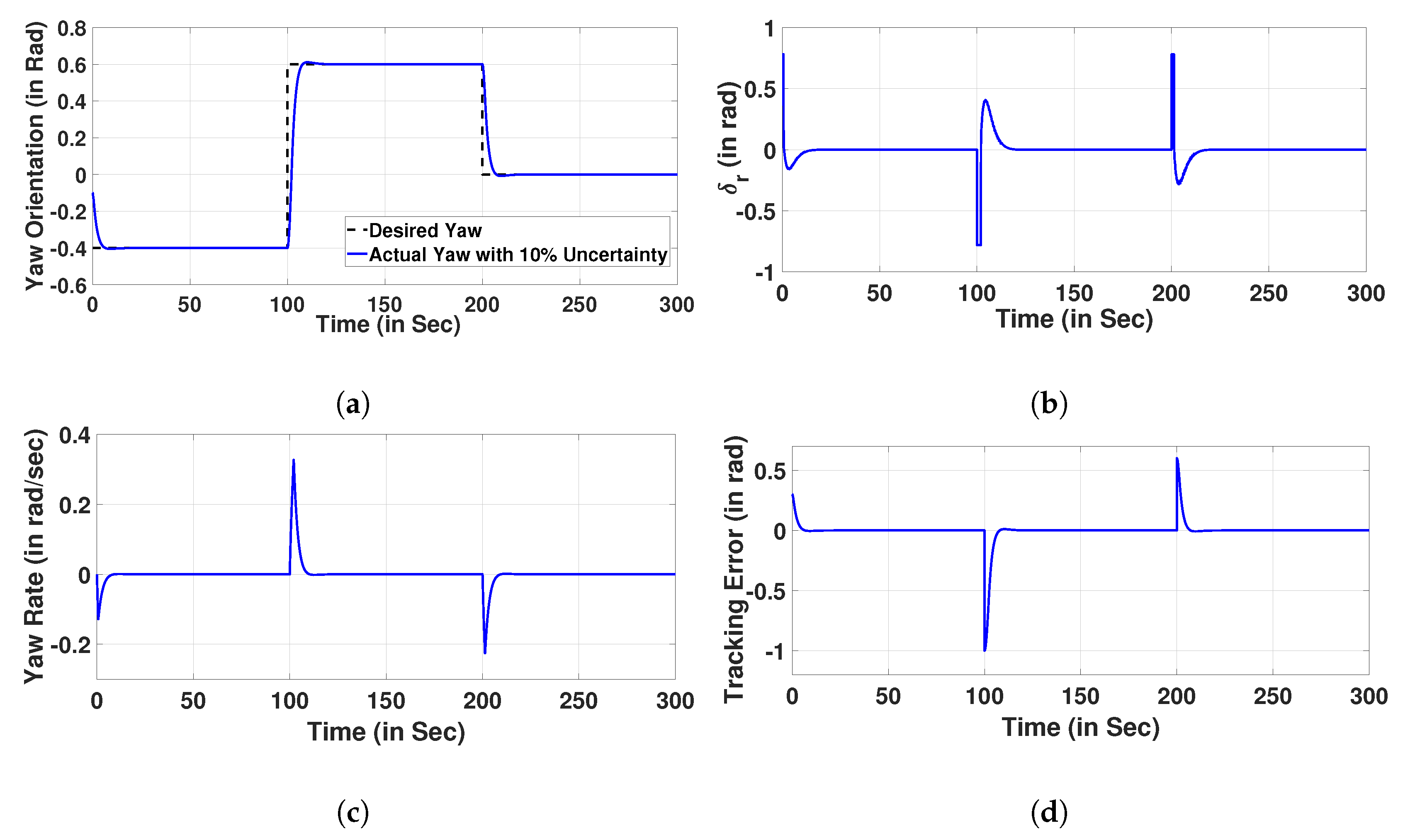
- The desired yaw needs to be achieved by minimizing the yaw error i.e.,where . The design of the backstepping controller is intentionally made to achieve an Equation (23).
- Subsequently, yaw orientation error is reduced to zero to achieve the desired yaw angle i.e.,where . A cascaded structure is adapted in the control design and the backstepping approach is employed in producing the desired yaw angle.
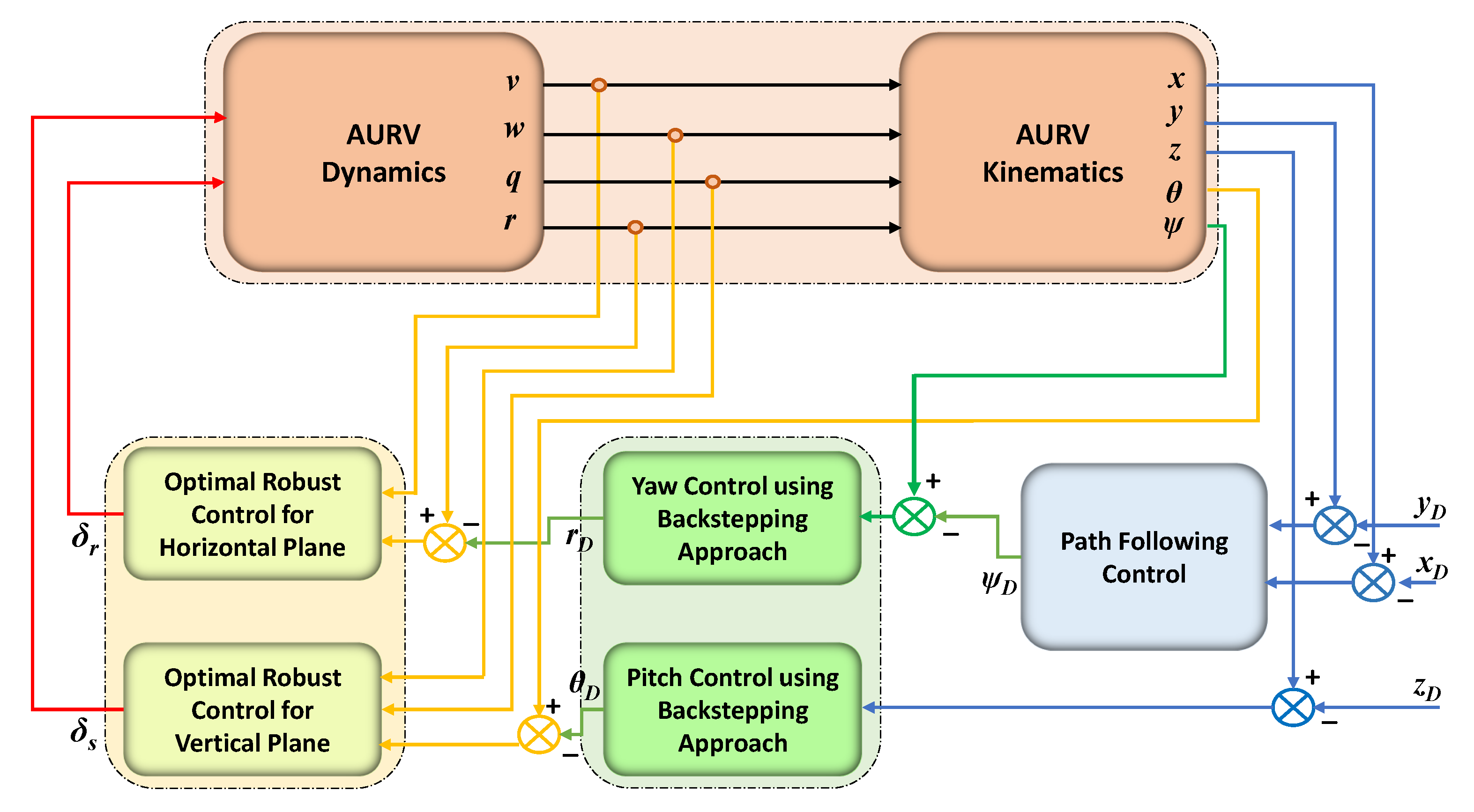
3. Control of AURV Kinematics
3.1. Backstepping Approach for Depth Control
3.2. Backstepping Approach for Yaw Control
3.3. Path Following Guidance Law
4. Control of AURV Dynamics
4.1. LMI Based Optimal State Feedback Controller
4.2. Robust LMI BASED Optimal Control Law
5. Results and Discussion
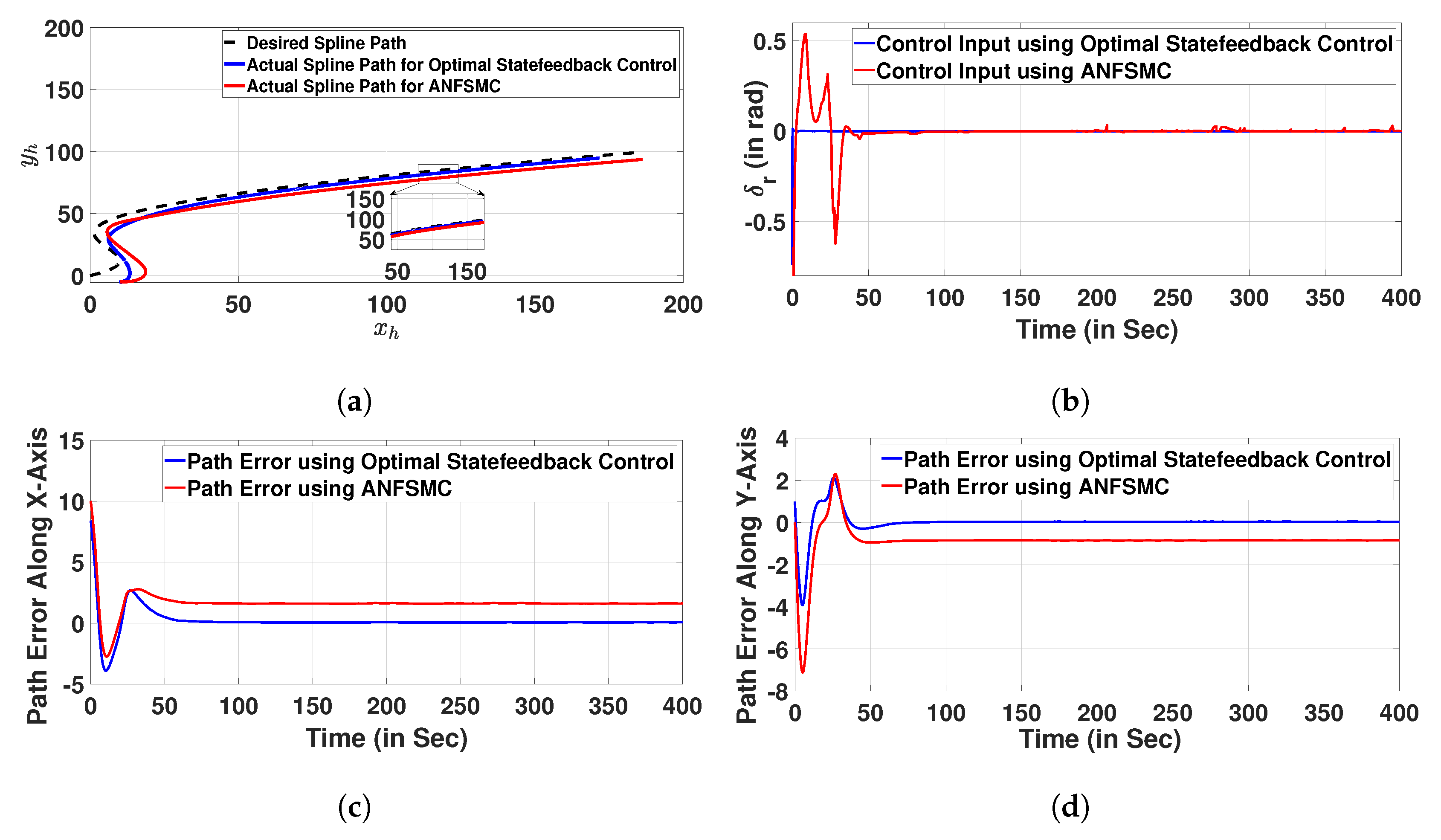
5.1. Path Following Control in Horizontal Plane
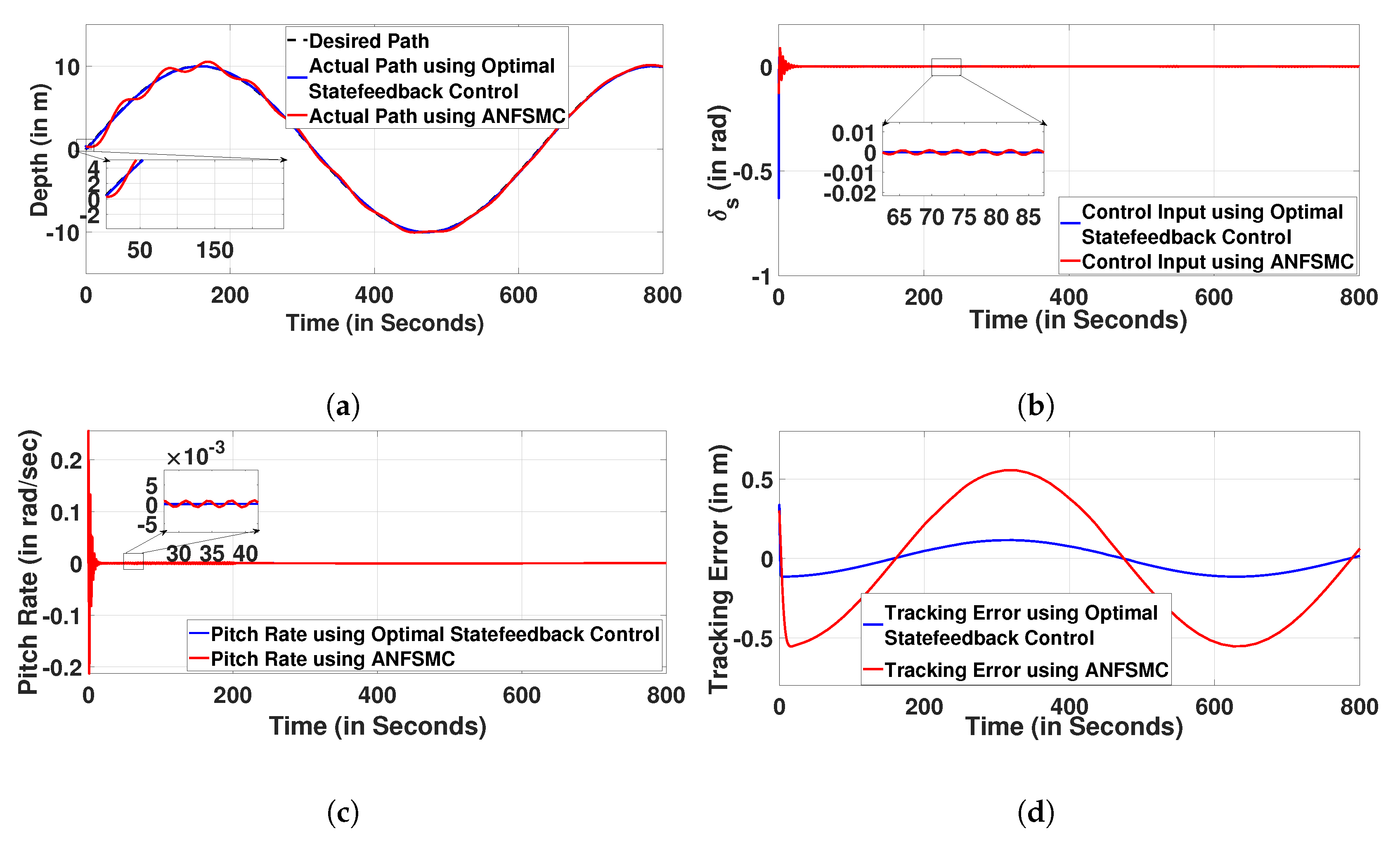
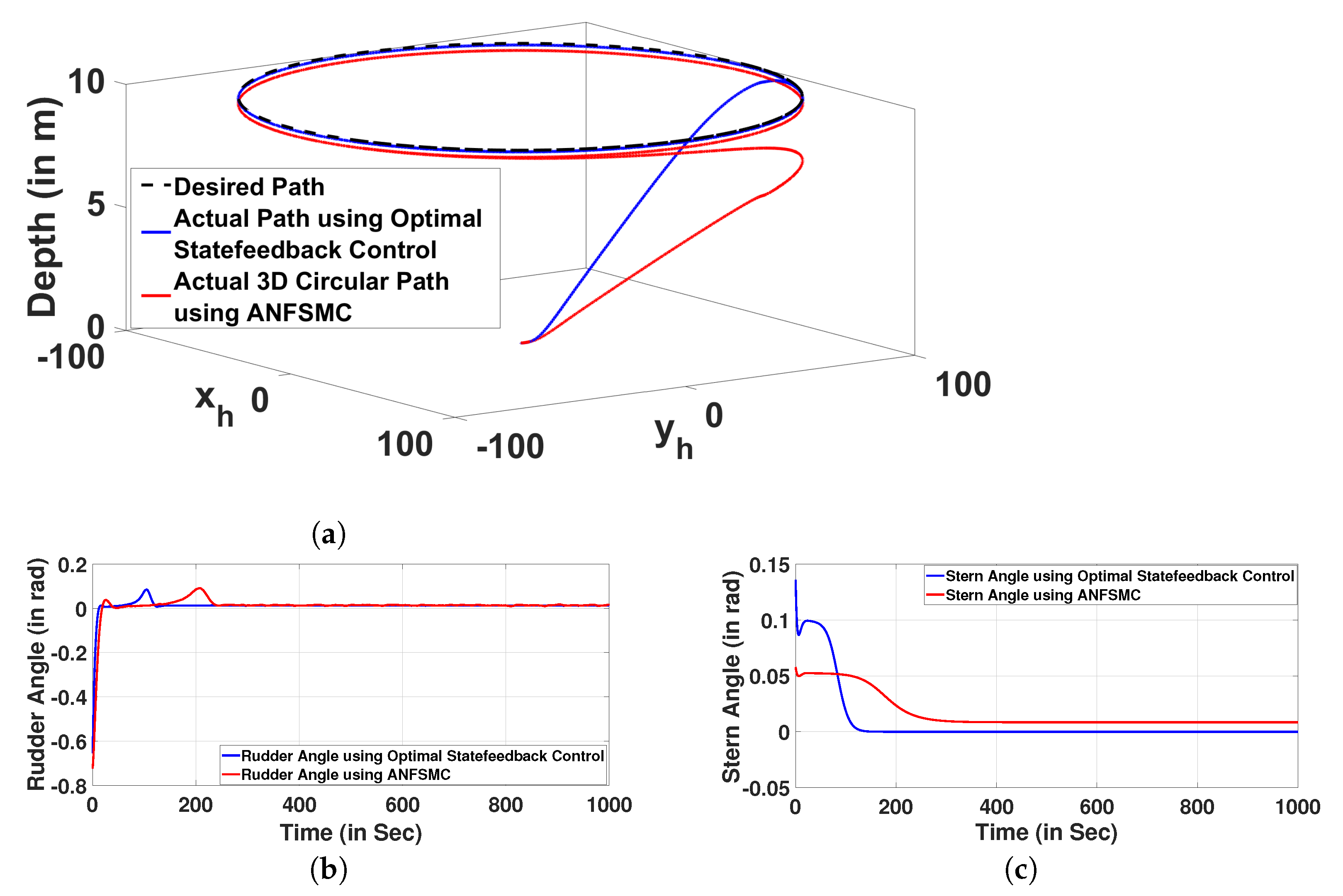
5.2. 3D Path Following
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AURV | Autonomous Underwater Robotic Vehicle |
| NED | North-East-Down |
| AUV | Autonomous Underwater Vehicle |
| SF | Serret-Frenet |
| SMC | Sliding Mode Control |
| MPC | Model Predictive Control |
| QPSO | Quantum behaved Particle Swarm Optimization |
| PID | Proportional Integral Derivative |
| LPV | Linear Parameter Varying |
| TAN | Terrain Aided Navigation |
| CMG | Control Moment Gyros |
| LMI | Linear Matrix Inequality |
| ANFSMC | Adaptive Neuro Fuzzy Sliding Mode Control |
References
- Santhakumar, M.; Asokan, T. Investigations on the hybrid tracking control of an underactuated autonomous underwater robot. Adv. Robot. 2010, 24, 1529–1556. [Google Scholar] [CrossRef]
- Zhang, L.; Jia, H.; Jiang, D. Sliding mode prediction control for 3d path following of an underactuated auv. IFAC Proc. Vol. 2014, 47, 8799–8804. [Google Scholar] [CrossRef] [Green Version]
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean. Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Yang, X.; Zhu, X.; Liu, W.; Ye, H.; Xue, W.; Yan, C.; Xu, W. A Hybrid Autonomous Recovery Scheme for AUV Based Dubins Path and Non-Singular Terminal Sliding Mode Control Method. IEEE Access 2022, 10, 61265–61276. [Google Scholar] [CrossRef]
- Lakhekar, G.; Waghmare, L. Robust self-organising fuzzy sliding mode-based path-following control for autonomous underwater vehicles. J. Mar. Eng. Technol. 2022, 1–22. [Google Scholar] [CrossRef]
- You, S.; Lim, T.; Jeong, S. General path-following manoeuvres for an underwater vehicle using robust control synthesis. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2010, 224, 960–969. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B. Design of a steering control law for an autonomous underwater vehicle using nonlinear H∞ state feedback technique. Nonlinear Dyn. 2017, 90, 837–854. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B. Design and experimental realization of a backstepping nonlinear H∞ control for an autonomous underwater vehicle using a nonlinear matrix inequality approach. Trans. Inst. Meas. Control 2018, 40, 3390–3403. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B.; Rout, R. Diving control of an Autonomous Underwater Vehicle using nonlinear H∞ measurement feedback technique. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Mahapatra, S.; Subudhi, B. Nonlinear matrix inequality approach based heading control for an autonomous underwater vehicle with experimental realization. IFAC J. Syst. Control 2021, 16, 100138. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B.; Rout, R.; Kumar, B. Nonlinear H∞ control for an autonomous underwater vehicle in the vertical plane. IFAC-PapersOnLine 2016, 49, 391–395. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B. Nonlinear H∞ state and output feedback control schemes for an autonomous underwater vehicle in the dive plane. Trans. Inst. Meas. Control 2018, 40, 2024–2038. [Google Scholar] [CrossRef]
- Cao, X.; Zhu, D.; Yang, S. Multi-AUV target search based on bioinspired neurodynamics model in 3-D underwater environments. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 2364–2374. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, C.; Zhang, G.; Xu, H.; Ran, X. Three-dimensional path tracking control of autonomous underwater vehicle based on deep reinforcement learning. J. Mar. Sci. Eng. 2019, 7, 443. [Google Scholar] [CrossRef] [Green Version]
- Xiong, C.; Chen, D.; Lu, D.; Zeng, Z.; Lian, L. Path planning of multiple autonomous marine vehicles for adaptive sampling using Voronoi-based ant colony optimization. Robot. Auton. Syst. 2019, 115, 90–103. [Google Scholar] [CrossRef]
- Cao, X.; Xu, X. Hunting algorithm for multi-auv based on dynamic prediction of target trajectory in 3d underwater environment. IEEE Access 2020, 8, 138529–138538. [Google Scholar] [CrossRef]
- Zhang, W.; Shen, P.; Qi, H.; Zhang, Q.; Ma, T.; Li, Y. AUV Path Planning Algorithm for Terrain Aided Navigation. J. Mar. Sci. Eng. 2022, 10, 1393. [Google Scholar] [CrossRef]
- Gan, W.; Zhu, D.; Ji, D. QPSO-model predictive control-based approach to dynamic trajectory tracking control for unmanned underwater vehicles. Ocean. Eng. 2018, 158, 208–220. [Google Scholar] [CrossRef]
- Cho, H.; Kim, B.; Yu, S.-C. AUV-Based Underwater 3-D Point Cloud Generation Using Acoustic Lens-Based Multibeam Sonar. IEEE J. Ocean. Eng. 2018, 43, 856–872. [Google Scholar] [CrossRef]
- Xu, R.; Tang, G.; Han, L.; Xie, D. Trajectory tracking control for a CMG-based underwater vehicle with input saturation in 3D space. Ocean Eng. 2019, 173, 587–598. [Google Scholar] [CrossRef]
- Yao, X.; Wang, X. Integral vector field control for three-dimensional path following of autonomous underwater vehicle. J. Mar. Sci. Technol. 2021, 26, 159–173. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Zhang, Q. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Comput. Oper. Res. 2017, 84, 165–177. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Lapierre, L.; Zhang, Q. Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean. Eng. 2017, 146, 457–467. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Qu, X.; Wan, L.; Ma, Q. Three-dimensional path following of an underactuated AUV based on fuzzy backstepping sliding mode control. Int. J. Fuzzy Syst. 2018, 20, 640–649. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Wang, S.; Miao, J. DO-LPV-based robust 3D path following control of underactuated autonomous underwater vehicle with multiple uncertainties. ISA Trans. 2020, 101, 189–203. [Google Scholar] [CrossRef]
- Lei, M.; Li, Y.; Pang, S. Robust singular perturbation control for 3D path following of underactuated AUVs. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 758–771. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean. Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Li, Y.; Wei, C.; Wu, Q.; Chen, P.; Jiang, Y.; Li, Y. Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle. Ocean. Eng. 2015, 105, 270–274. [Google Scholar] [CrossRef]
- Liang, X.; Wan, L.; Blake, J.; Shenoi, R.; Townsend, N. Path following of an underactuated AUV based on fuzzy backstepping sliding mode control. Int. J. Adv. Robot. Syst. 2016, 13, 122. [Google Scholar] [CrossRef] [Green Version]
- Cervantes, J.; Yu, W.; Salazar, S.; Chairez, I.; Lozano, R. Output based backstepping control for trajectory tracking of an autonomous underwater vehicle. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 6423–6428. [Google Scholar]
- He, Y.; Wu, M.; She, J. Improved bounded-real-lemma representation and H∞ control of systems with polytopic uncertainties. IEEE Trans. Circuits Syst. II Express Briefs 2005, 52, 380–383. [Google Scholar]
- Karimi, A.; Sadabadi, M. Fixed-order controller design for state space polytopic systems by convex optimization. IFAC Proc. Vol. 2013, 46, 683–688. [Google Scholar] [CrossRef] [Green Version]
- Helwa, M.; Lin, Z.; Broucke, M. On the necessity of the invariance conditions for reach control on polytopes. Syst. Control Lett. 2016, 90, 16–19. [Google Scholar] [CrossRef]
- Vesely, V.; Ilka, A. Generalized robust gain-scheduled PID controller design for affine LPV systems with polytopic uncertainty. Syst. Control Lett. 2017, 105, 6–13. [Google Scholar] [CrossRef] [Green Version]
- Hosoe, Y.; Hagiwara, T.; Peaucelle, D. Robust stability analysis and state feedback synthesis for discrete- time systems characterized by random polytopes. IEEE Trans. Autom. Control 2017, 63, 556–562. [Google Scholar] [CrossRef]
- Tognetti, E.; Calliero, T.; Jungers, M. Output feedback control for bilinear systems: A polytopic approach. IFAC-PapersOnLine 2019, 52, 58–63. [Google Scholar] [CrossRef]
- Jirasek, R.; Schauer, T.; Bleicher, A. Active Vibration Control of a Convertible Structure based on a Polytopic LPV Model Representation. IFAC-PapersOnLine 2020, 53, 8389–8394. [Google Scholar] [CrossRef]
- Goyal, J.; Aggarwal, S.; Ghosh, S.; Kamal, S.; Dworak, P. L2-based static output feedback controller design for a class of polytopic systems with actuator saturation. Int. J. Control 2021, 95, 2151–2163. [Google Scholar] [CrossRef]
- Yamashita, Y.; Matsukizono, R.; Kobayashi, K. Asymptotic stabilization of nonlinear systems with convex-polytope input constraints by continuous input. Automatica 2022, 138, 110032. [Google Scholar] [CrossRef]
- Lakhekar, G.; Waghmare, L.; Jadhav, P.; Roy, R. Robust diving motion control of an autonomous underwater vehicle using adaptive neuro-fuzzy sliding mode technique. IEEE Access 2020, 8, 109891–109904. [Google Scholar] [CrossRef]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Robust Observer-Based Fault Diagnosis for Nonlinear Systems Using MATLAB®; Springer: Berlin, Germany, 2016. [Google Scholar]
- Silvestre, C.; Pascoal, A. Control of the INFANTE AUV using gain scheduled static output feedback. Control Eng. Pract. 2004, 12, 1501–1509. [Google Scholar] [CrossRef]
- Fossen, T. Guidance and Control of Ocean Vehicles. Ph.D. Thesis, University of Trondheim, Trondheim, Norway; Printed By John Wiley & Sons: Chichester, UK, 1999; ISBN 0 471 94113 1. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description |
|---|---|
| F | Body fixed frame |
| O | NED frame |
| T | Serret-Frenet reference frame |
| m | Mass of the AURV |
| W | Weight of AURV |
| B | Buoyancy Force |
| Linear and angular velocities | |
| Linear and angular positions | |
| Moments of inertia about x, y, and z axes in the body-fixed frame | |
| () | Center of buoyancy |
| () | Center of gravity |
| T | Total thrust in vertical plane and horizontal plane |
| () | Lyapunov function |
| Stern angle | |
| Rudder angle | |
| {} | Error Space between body and SF frame along X-Axis |
| {} | Error Space between body and SF frame along Y-Axis |
| Position of T frame relative to O frame | |
| Position of F frame relative to T frame | |
| Position of F frame relative to O frame | |
| Curvilinear abscissa along the path | |
| Yaw angle between O and T coordinate system | |
| Subscripts | |
| d | Parameters of vertical plane |
| h | Parameters of horizontal plane |
| D | Desired values for depth tracking and yaw tracking |
| t | Parameters of Serret-Frenet frame |
| E | Error representation for depth and yaw |
| Hydrodynamic Parameters | Uncertainty Percentage | Range Obtained |
|---|---|---|
| Hydrodynamic Parameters | Uncertainty Percentage | Range Obtained |
|---|---|---|
| 0 | 0.81 | −0.018 | ||
| 0 | 0.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vadapalli, S.; Mahapatra, S. 3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law. J. Mar. Sci. Eng. 2023, 11, 277. https://doi.org/10.3390/jmse11020277
Vadapalli S, Mahapatra S. 3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law. Journal of Marine Science and Engineering. 2023; 11(2):277. https://doi.org/10.3390/jmse11020277
Chicago/Turabian StyleVadapalli, Siddhartha, and Subhasish Mahapatra. 2023. "3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law" Journal of Marine Science and Engineering 11, no. 2: 277. https://doi.org/10.3390/jmse11020277