1.1. Background Introduction
The ocean accounts for approximately 70% of the Earth’s total area [
1]. It is rich in mineral resources and biological resources. It is an important place for human economic, cultural, and scientific research. However, the harsh and changeable marine environment makes us face many difficulties in the process of surveying marine resources and safeguarding maritime rights and interests. The traditional way of using manned vessels often has difficulty ensuring the safety of personnel and has low efficiency. We need to develop auxiliary development platforms for efficient and safe water resources to better control water resources and safeguard maritime rights. As a surface mobile platform with autonomous operation ability, unmanned surface vehicles (USVs) have the advantages of dangerous environmental operation, low cost, and high efficiency, and have attracted extensive attention from countries and economies all over the world [
2,
3,
4,
5]. USV formation refers to several USVs cooperating to complete one or more tasks in a certain formation. Compared with a single USV, the formation of USVs has stronger robustness, higher operating efficiency, and wider operating range. It can be applied to more complex mission scenarios. The formation of USVs has high practical engineering application value and is a current and future development direction.
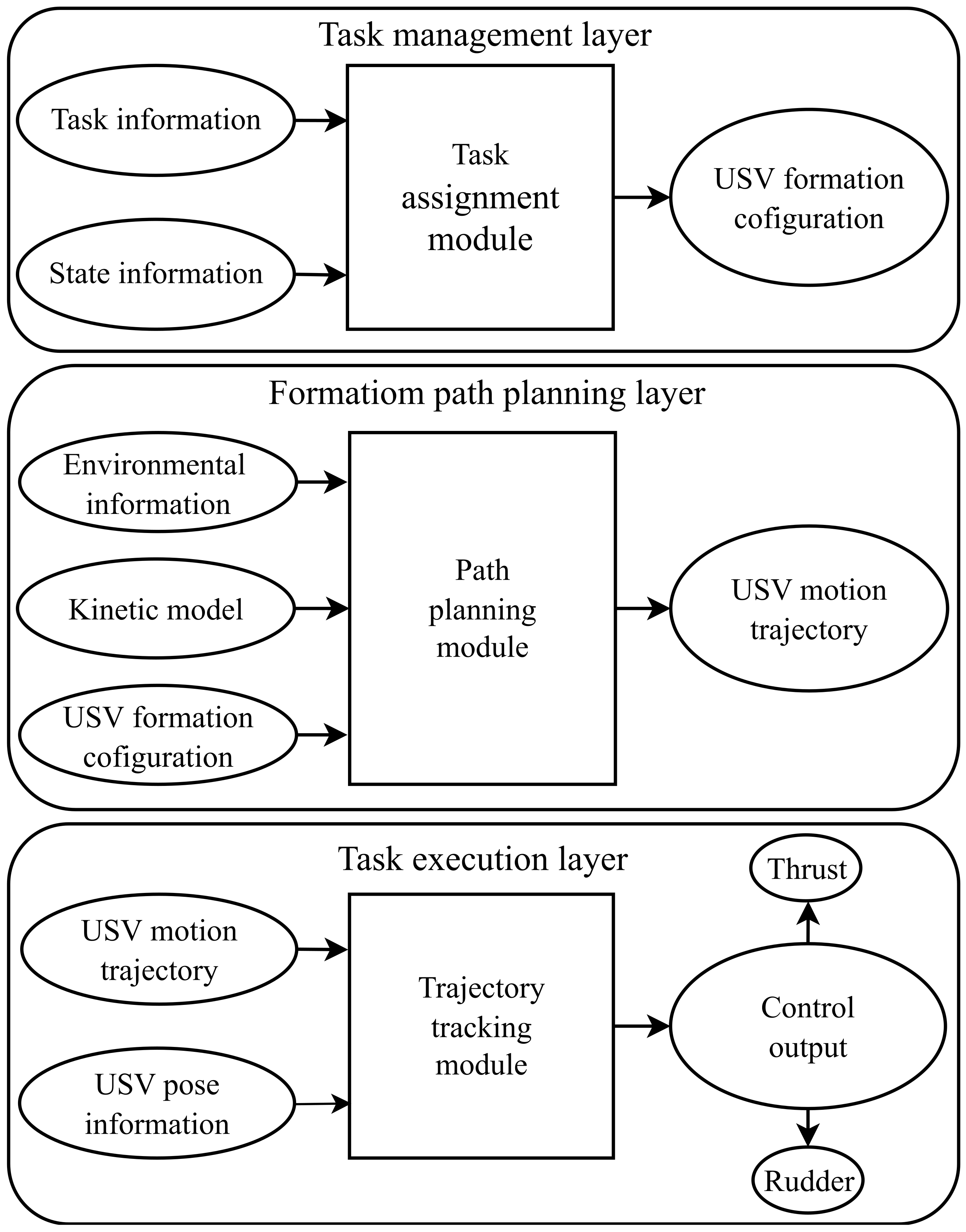
USV formation can be divided into three layers: task management layer, formation path planning layer, and task execution layer [
6], as shown in
Figure 1. The task management layer decomposes and assigns tasks to each USV according to the task requirements and the currently managed USV’s state information. The formation task configuration information obtained by each USV includes the task start point, the task endpoint, the formation shape information, the formation reconfiguration information, and the position information of the USV in the formation. The mission management layer passes this formation configuration information to the formation path planning layer. The path planning module plans the motion trajectory of each USV according to the formation configuration information, environmental information, and kinetic model. The formation path planning layer transmits the trajectory of each USV to the task execution layer. The trajectory tracking module calculates the real-time control output according to the trajectory and the pose information of the USV so that the USV can track the trajectory. The control output of the USV is thrust and rudder.
From the hierarchical structure of USV formation, we can see that the formation path planning layer plays a very important role, connecting the task management layer and the task execution layer. Formation tasks of USVs can be divided into forming a designated formation, sailing according to a fixed formation, and formation transformation. Therefore, the path planning layer also needs corresponding path planning strategies; that is, the path planning layer needs to solve three types of planning problems: formation generation, formation transformation, and formation navigation. The formation path planning of USVs is based on the path planning of a single USV.
The aim of path planning is to find a feasible path in a specific environment. This path begins at the starting point and ends at the target point [
7]. The path planning problem can be regarded as a multiobjective optimization problem [
8]. The trajectory should be optimized in distance, time, energy consumption, risk cost, and other aspects. In addition, the smoothness of the trajectory and whether it meets the kinetic constraints of the mobile robot cannot be ignored. The solution methods of multiobjective optimization problems are mainly of two categories: traditional optimization methods and intelligent optimization methods. Traditional optimization algorithms include weighting method [
9], constraint method [
10], and linear programming method [
11], which essentially transform the multiobjective function into single-objective function and achieve the solution of multiobjective function by using the single-objective optimization method. Intelligent optimization algorithms include genetic algorithms [
12], artificial neural networks [
13,
14], and so on. A good USV formation path planning method needs to meet the following indicators [
15]:
Rationality: Any path of return is reasonable, or any path is feasible for formation movement.
Completeness: If, objectively, there is a collision-free path from the starting point to the endpoint, the algorithm can find it; if no path is available, a planning failure is reported.
Optimality: The resulting path planned by the algorithm is optimal on some measures (such as time, distance, energy consumption, etc.).
Real-time: The complexity of the planning algorithm (time requirements, storage requirements, etc.) can meet the needs of USV movement.
Satisfy constraint: Supporting the nonintegrity constraint of USV movement.
Much research has been carried out on formation path planning methods for unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), and mobile robots [
16,
17,
18]. In recent years, some research on path planning of USV formation has emerged. Tam [
19] proposed a multiboat coordinated path planning algorithm that conforms to the COLREGS rule. The simulation results show that the output of the algorithm is effective and consistent in various traffic scenarios. Liu [
6] proposed a constrained fast-marching method to address the dynamic problem in path planning of USV formation. The simulation results showed that collision-free paths can be generated for formations for complex, practical, and for both static and dynamic environments. Sang [
20] presented a hybrid path planning algorithm based on improved A* and multiple subtarget artificial potential field (MTAPF). The MTAPF belongs to the local path planning algorithm, which refers to the global optimal path generated by an improved heuristic A* algorithm. The simulation results showed that the algorithm can greatly reduce the probability that USV will fall into the local minimum and help USV to move out of the local minimum by switching target points. Ouyang [
21] proposed an algorithm for USV formation path planning based on an improved rapidly-exploring random tree (RRT) algorithm for global path planning and obstacle avoidance. This research showed that the improved algorithm has such advantages as high efficiency, good stabilization, and high-quality planning paths. Wang [
22] proposed a path planning algorithm for USV formation based on the variable fast-marching method. The method regards the feasible area as anisotropy and considers that the safety of a point is linearly related to the distance between the point and the obstacle. The method was experimentally proven to have good real-time performance. In addition, the traditional A* algorithm [
23], particle swarm optimization [
24], genetic algorithm [
25], and ant colony algorithm [
26] are also used to solve the problem of multirobot formation path planning, but they are seldom applied to USV formation path planning.
Path planning can be divided into three stages: route planning, trajectory planning, and motion planning, according to whether the kinematics and dynamics of the USV are considered in the planning process [
27]. In the route planning stage, the USV is regarded as a particle model. The shape, dynamics, and kinematics constraints of the USV are not considered. In the trajectory planning stage, some constraints, such as the shape of the USV and the minimum turning radius, are considered in the planning. At the stage of motion planning, considering the kinetic model of USV, the path suitable for USV tracking is planned. However, most of the previous studies [
28,
29,
30,
31] are only at the route planning level and lack the consideration of the USV kinetic model. The path may not satisfy the nonintegrity constraints of the USV. In addition, formation problems include formation generation, formation transformation, and formation navigation. Most of the previous studies focused on formation navigation, but few systematically studied the three problems. Therefore, this paper focuses on solving the path planning problem of USVs considering the kinetic model and provides corresponding solutions to formation generation, formation navigation, and formation transformation of USVs.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}