1. Introduction
Podded propulsion is an uncommon propulsion system. In contrast to conventional propulsion, podded propulsion combines the propeller and pod into a single propulsion unit. Because the pods do not require a complex mechanical transmission device, their transmission efficiency is typically higher than that of a conventional rudder propeller unit. Pod propulsion enables full utilization of electric propulsion systems, resulting in pod propulsion units with a wide range of applications. In addition, the mechanical structure of pod propulsion is relatively simple and offers many advantages, such as vibration damping and a flexible internal design layout. Pod propellers rotate freely and can generate thrust in any direction, which provides excellent maneuverability to the ship. However, the hydrodynamic performance of the pod propellers under maneuvering and steady-state conditions differs significantly. Therefore, it is necessary to investigate the maneuvering performance of the propellers and pods at different angles.
Early research on pods focused on direct current conditions, particularly the interaction between the pod and propeller, and the hydrodynamic performance of the propeller. Bal [
1] analyzed the flow around a pod unit and the performance characteristics of the propeller on the pod. Wang et al. [
2] examined the influence of hydrodynamic performance on design parameters such as the axial distance between the front and rear propellers and the advanced speed ratio. Sánchez et al. [
3] coupled a Reynolds-averaged Navier–Stokes (RANS) solver with a single-phase cavitation model, which can reasonably predict the degree of cavitation without significantly increasing the computational effort. Xiong et al. [
4] used the unsteady panel method to solve the hydrodynamic performance of towed podded propulsion and calculated the hydrodyjmse-2271037 namic performance of podded propulsion in uniform and non-uniform inflows. Zhao et al. [
5] developed a set of hydrodynamic performance measurement devices based on the structural characteristics of an L-shaped pod propulsion. Islam et al. [
6] combined an experimental evaluation with a numerical prediction to study the hydrodynamic performance of podded propulsion. Cao et al. [
7] studied the influence of the initial phase angle and load matching of the podded propulsion through a multi-scheme model test of the podded propeller. Shamsi et al. [
8] used a turbulent numerical simulation method to analyze the hydrodynamic performance of podded propulsion in open-water and azimuth conditions. In addition, a RANS-based solver was used to study the changes, at different angles, in the hydrodynamic properties of the podded propulsion.
In oblique flow, the hydrodynamic performance changes significantly. In particular, under instantaneous slewing conditions, the hydrodynamic performance changes are particularly dramatic. Xie et al. [
9] employed an experimental method to measure the thrust, torque, and steering torque at multiple azimuth angles for towed pod thrusters. The test data will facilitate the design of ship maneuvering gear and podded thrusters. Xu et al. [
10] adopted a numerical simulation method and researched the relationship between the hydrodynamic performance parameters and steering angle of the hybrid CRP-podded propulsion. Liu et al. [
11] employed a panel method to predict the unsteady force, torque, and bending torque of podded propulsion systems at different azimuth angles. Shen et al. [
12] used an experimental method to study the cavitation performance of a podded thruster in the range of rudder angle (±5°). At the same time, they measured the pulsating pressure on the hull and the pod at 0° rudder angle. This verifies the design and application of the podded thruster. Reichel [
13] applied an experimental method to investigate the hydrodynamic characteristics of a podded thruster in open water over a range of forwarding coefficients from 0.0 to 0.8 and deflection angles in the range of ±45°. Andreas et al. [
14] applied the unsteady RANS solver to calculate the forces and torque of podded propulsion. Then, they compared their results with those of the conventional propeller, and discussed their maneuverability performance at design speeds. Stettler et al. [
15] employed an experimental method to demonstrate the stress problem of podded propulsion and analyzed the relationship between the stress and azimuth angle of the propeller under different advanced coefficients. Their method reduced the propeller surface pressure by improving the azimuth angle, which reduces propeller loss. Islam et al. [
16] applied an experimental method to discuss the propulsion characteristics of pods under static and dynamic azimuth conditions. The results showed that the propeller load and propulsion performance of the pod and propeller had a significant relationship with the azimuth angle. Amini et al. [
17] performed RANS-based numerical simulation to investigate the influence of a wide range of oblique flow angles on the hydrodynamic performance of the propeller under two different loading conditions.
The pod propulsion system comprises a propeller and pod. This structure allows the entire pod to rotate 360°, which enables pod propulsion to deliver improved maneuverability over that of a conventional propeller rudder system. Therefore, it is important to study the hydrodynamic performance of podded propulsion under maneuvering conditions. Islam et al. [
18] adopted an experimental method to study the axial thrust and torque, unit thrust, and lateral force of the podded propulsion in maneuvering conditions in the range of ±180°. Akinturk et al. [
19] applied an experimental method to study the performance of pods under different maneuvering conditions in the range of ±180° and investigate the influence of hydrodynamic performance of podded propulsion under static and dynamic conditions. Shen et al. [
20] established a numerical model and used a slip grid to simulate the hydrodynamic performance of a podded propulsion in an unstable flow. The predicted results were consistent with the experimental data, validating the feasibility of the model technology. Islam et al. [
21] used computational fluid dynamics (CFD) simulation to study the hydrodynamic performance of podded propulsion under various extreme static azimuth conditions. The analysis shows that the RANS-based method can predict the performance of the podded propulsion under extreme azimuth and high-load conditions, and its accuracy is of the same order of magnitude as the experimental results. Zhao et al. [
22] used the RANS method and SST k–ω turbulence model to study the loads on podded propulsion. The hydrodynamic characteristics of podded propulsion under azimuth angle were analyzed, and the changes in propeller thrust and torque were investigated. Mewis et al. [
23] adopted an experimental method to study the hydrodynamic efficiency of podded propulsion under maneuvering conditions. Their experiments show that podded propulsion has lower propulsion efficiency than the traditional single propeller. Ortolani et al. [
24,
25,
26] used experimental and numerical simulation methods to study the periodic evolution of single-blade load and propeller load at the rear of the ship under different operating conditions, as well as the effects of factors such as ship wake and different oblique flow angles on propeller load, pressure pulsation, noise, and other aspects. Reichel M et al. [
27,
28,
29] used numerical simulation and experimental methods, the experimental process complies with the implementation procedures for maneuvering tests proposed by the International Maritime Organization (IMO). Validation shows acceptable agreement between numerical and experimental results, i.e., confirms the usability of developed mathematical model to identify the trends in performance also for course unstable ship.
These studies have not adequately investigated the hydrodynamic performance of pods under maneuvering conditions. However, this is a key problem in pod propulsion research, and further investigation is required. There is limited understanding of the hydrodynamic performance of the propeller under maneuvering conditions because the interaction between the propeller and pod shell remains difficult to predict. However, in this study, numerical simulation is performed using the STAR-CCM+ software to analyze the forces and torques of the propeller blade under maneuvering and steady-state conditions. Moreover, the relationship between the propeller hydrodynamic performance and water incidence angle is determined.
2. Governing Equations
Under the assumption that the fluid has a constant density, is incompressible, and is devoid of mass forces, the continuity equation of a Newtonian fluid takes the following form:
where
(
i = 1, 2, 3) is the velocity component;
(
i = 1, 2, 3) are the coordinates; P is the pressure (Pa);
v is the viscosity coefficient of fluid motion (
);
is the fluid density (kg/m
3); and
t is time (s). These are the basic governing equations used in CFD. The variables in Equation (2) are decomposed into time averages and pulsations for the simulation of turbulent motion as follows.
Then, by averaging the time on both sides of Equation (2), we obtain the Navier–Stokes equation of the time average.
In Equation (4), ,, and p is the time average, and we add the Reynolds stress term . We use a turbulence model to solve the turbulence problem of viscous fluids.
2.1. RANS Equations
By utilizing the time-averaged equation, the RANS equations can account for the transient pulsating momentum. The primary objective of these equations is not to solve the transient Navier–Stokes equations directly but to develop an approach to solve the time-averaged turbulence equations. The RANS equations represent the governing equations for the average variables of the flow field. They assume that the turbulence-induced variation in the flow field variable consists of a time-averaged quantity and a fluctuating quantity. The Boussinesq hypothesis is then introduced, which postulates that the turbulent Reynolds stress is proportional to the strain. This enables the turbulence calculation to be reduced to the calculation of the proportional coefficient between the Reynolds stress and the strain. According to Guo et al. [
30], the RANS turbulence model establishes a strong connection with the RANS equations, which govern the mean flow characteristics. The equations for average mass and momentum transfer can be expressed in the following form:
In all the equations, denotes the time-averaged value of the velocity component, t is the time, is the time-averaged value of the pressure, is the fluid density, is the dynamic viscosity coefficient, denotes the Reynolds stress term, and denotes the generalized source term of the momentum equation.
2.2. Turbulence Model
We performed simulations using the SST k–ω turbulence model, which considers the flow characteristics of the inverse pressure gradient boundary layer and retains the advantage of the turbulence model calculation. The transport equation for the turbulence model is expressed as follows:
where
is the average velocity,
is the dynamic viscosity,
,
,
,
,
is the model coefficient,
and
are the result items,
is the correction factor for free shear,
is the eddy current extension correction factor,
and
is the customized source items,
and
are the ambient turbulence values to prevent turbulence decay, and S is the modulus of the average strain rate tensor.
3. Computational Domain and Grid Conditions
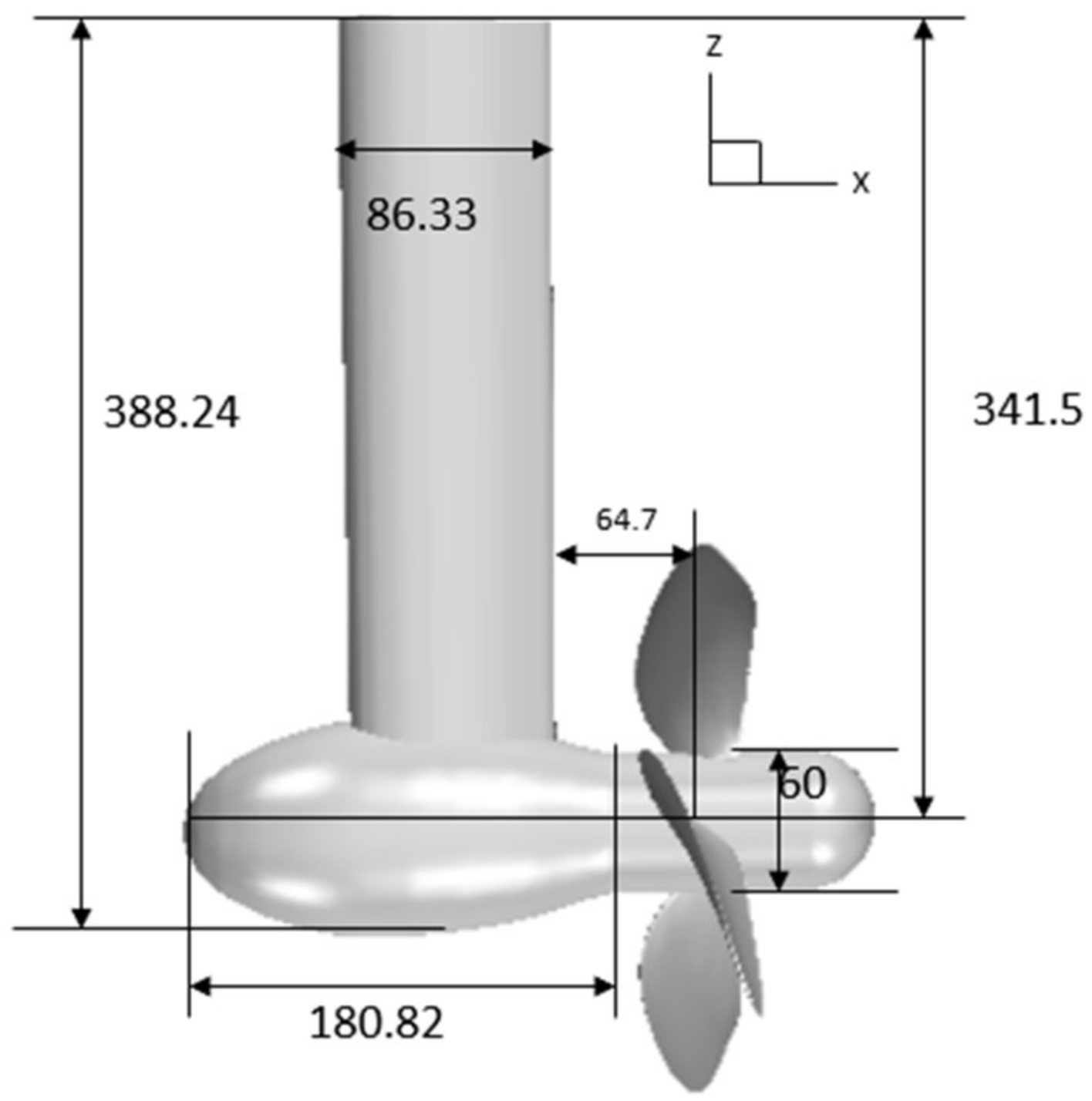
The pod unit used in this study is the P-1374 standard propeller designed by MARINTEK. This unit includes three parts: propeller, pod, and bracket.
Table 1 lists the geometric parameters of the propeller. This structure is modeled using Siemens NX, a 3D modeling software. The structure obtained from the work by Zhao et al. [
19]. Where the diameter of the propeller was 250 mm, and the diameter of the hub was 60 mm.
Figure 1 shows the geometric dimensions of each part except for the blade.
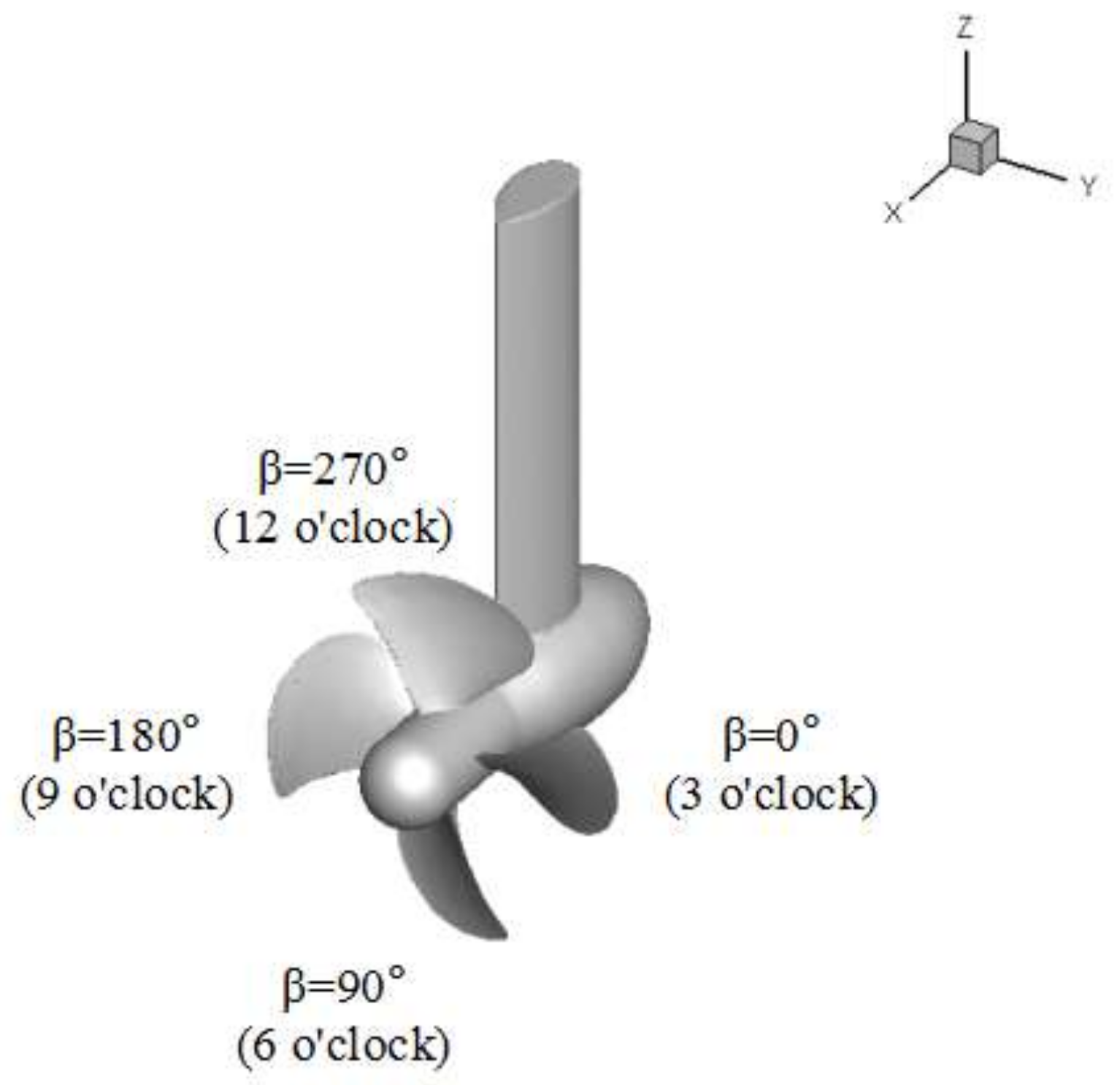
Figure 2 shows a geometric model of the paddle. In
Figure 2,
is the rotation angle of a single blade; the three o’clock direction is defined as the 0° position of the blade, and the 90°, 180°, and 270° positions are defined in turn along the rotation direction of the blade.
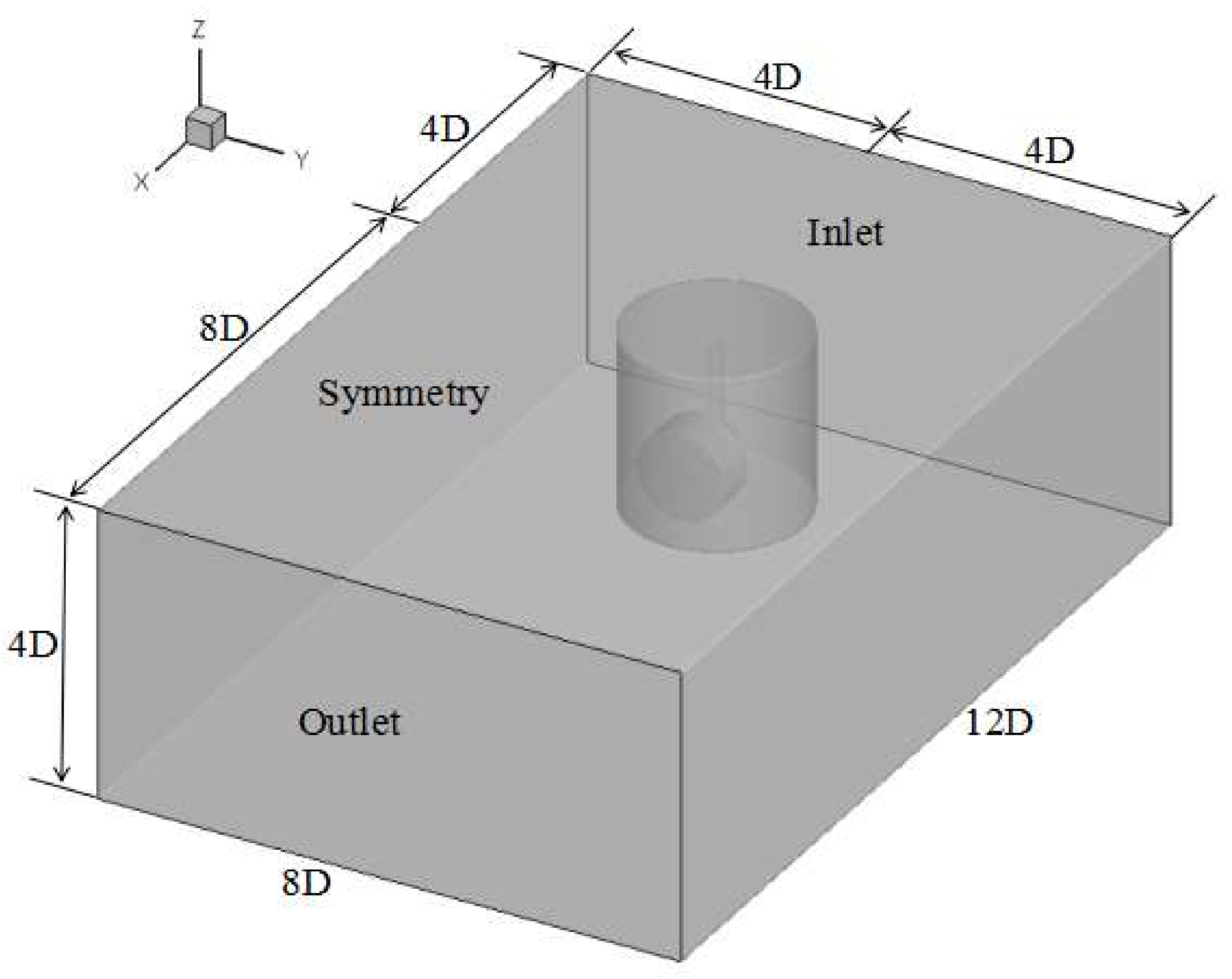
Figure 3 shows the propeller diameter and the length, width, and height of the computational domain are 12D, 8D, and 4D, respectively. The boundary condition for the inlet is set to the velocity inlet, the boundary condition for the outlet is set as the pressure outlet, and the boundary conditions of the surrounding planes of the computational domain are set to symmetry.
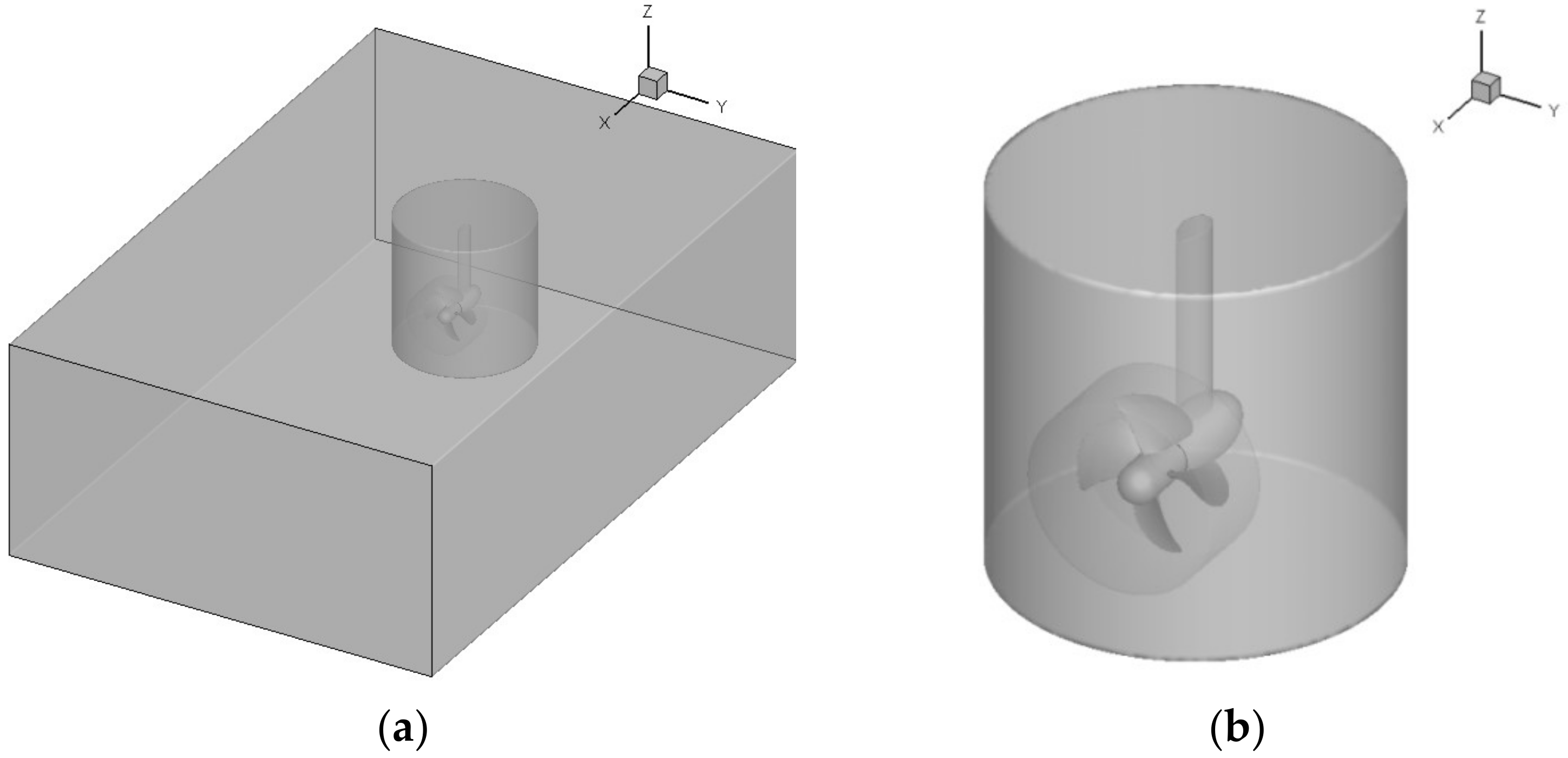
Figure 4 shows a part of the rotation domain; the simulation uses the sliding mesh method to simulate the rotational motion. The simulation sets up two rotation domains. The small rotation domain includes the propeller, and the function is to simulate the motion of the propeller. The large rotation domain includes the pod, the bracket, and the small rotation domain, and the function is to simulate the maneuvering motion of the pod unit. The small rotation domain is located within the large rotation domain and moves with the large rotation domain.
4. Grid Validation
Figure 5 lists the two oblique flow conditions discussed in the study; one is the maneuvering condition, which calculates the transient load, and the other is the steady-state condition, which calculates the steady-state load. The turning angular velocity of the maneuvering condition is not zero, while the turning angular velocity of the steady-state condition is zero. VA is a uniform flow along the positive X-axis,
is the angle between the propeller and OX axes. The positive direction of the Y-axis is defined as −90° and the negative direction of the Y-axis is defined as 90°, that is, clockwise rotation is positive. The positive direction of the Y-axis points to the ships starboard side, and the negative direction points to the port side. O-X-Y is the stationary coordinate system, and o-x-y is the rotating coordinate system. The origin of the O-X-Y coordinate is at the center of the top of the bracket, and the origin of the o-x-y coordinate is at the center of the paddle. The o-x-y coordinate system moves with the propeller, and the o-x direction is always the propeller axis.
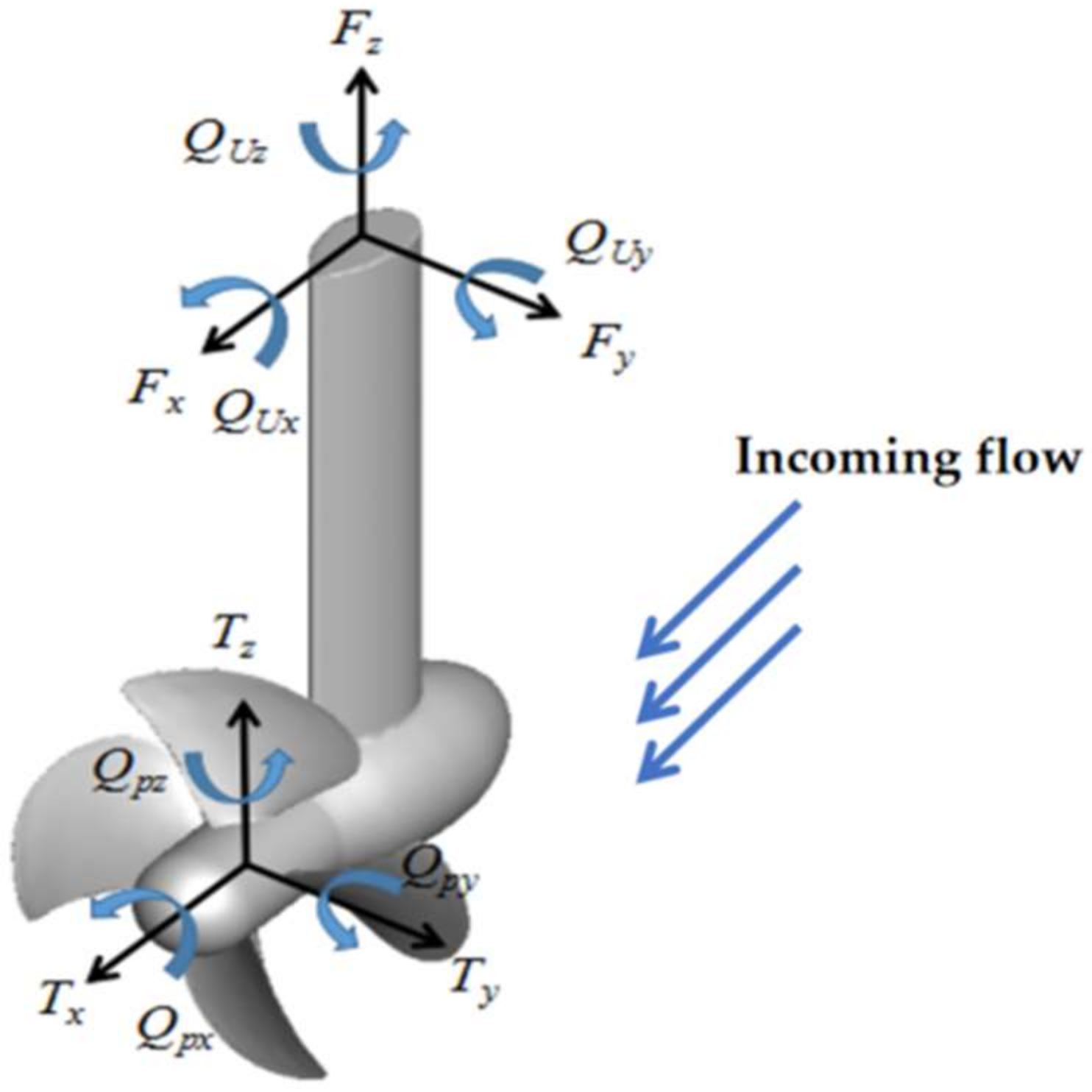
Figure 6 shows a schematic of the load on the pod unit where
Tx,
Ty, and
Tz, are the thrust of the propeller in the axial, lateral, and vertical directions of the propeller.
Qpx,
Qpy, and
Qpz are the moment of the propeller in the axial, lateral, and vertical torques of the propeller, respectively.
Fx,
Fy, and
Fz are rotational angular velocity, respectively. The load on the propeller is fixed in the o-x-y rotating coordinate system, and the load on the pod unit is fixed in the O-X-Y stationary coordinate system.
The thrust coefficient of the propeller is
KTP, the torque coefficient of the propeller is
KQP, and they are expressed as follows:
where
is the density of the fluid,
n is the speed of the propeller (10 rps),
D is the diameter of the paddle,
is the propulsion efficiency,
J is the advance number, and the change in its value is caused by the change in
VA.
4.1. Mesh Convergence Analysis
The number of grids significantly influences the calculation results in the numerical simulation. According to the work of Hu et al. [
31], we set three grid schemes before the grid convergence analysis. The basic size of the coarse grid is 0.005 m, and the medium and coarse grids are 0.0063 and 0.0079 m, respectively.
Figure 7 shows the surface of the fine grid. In
Figure 7a, the grids of the blades and hub are densified. Higher requirements for grid quality are due to a faster blade tip speed; therefore, the blade tip mesh is further refined, as shown in
Figure 7b.
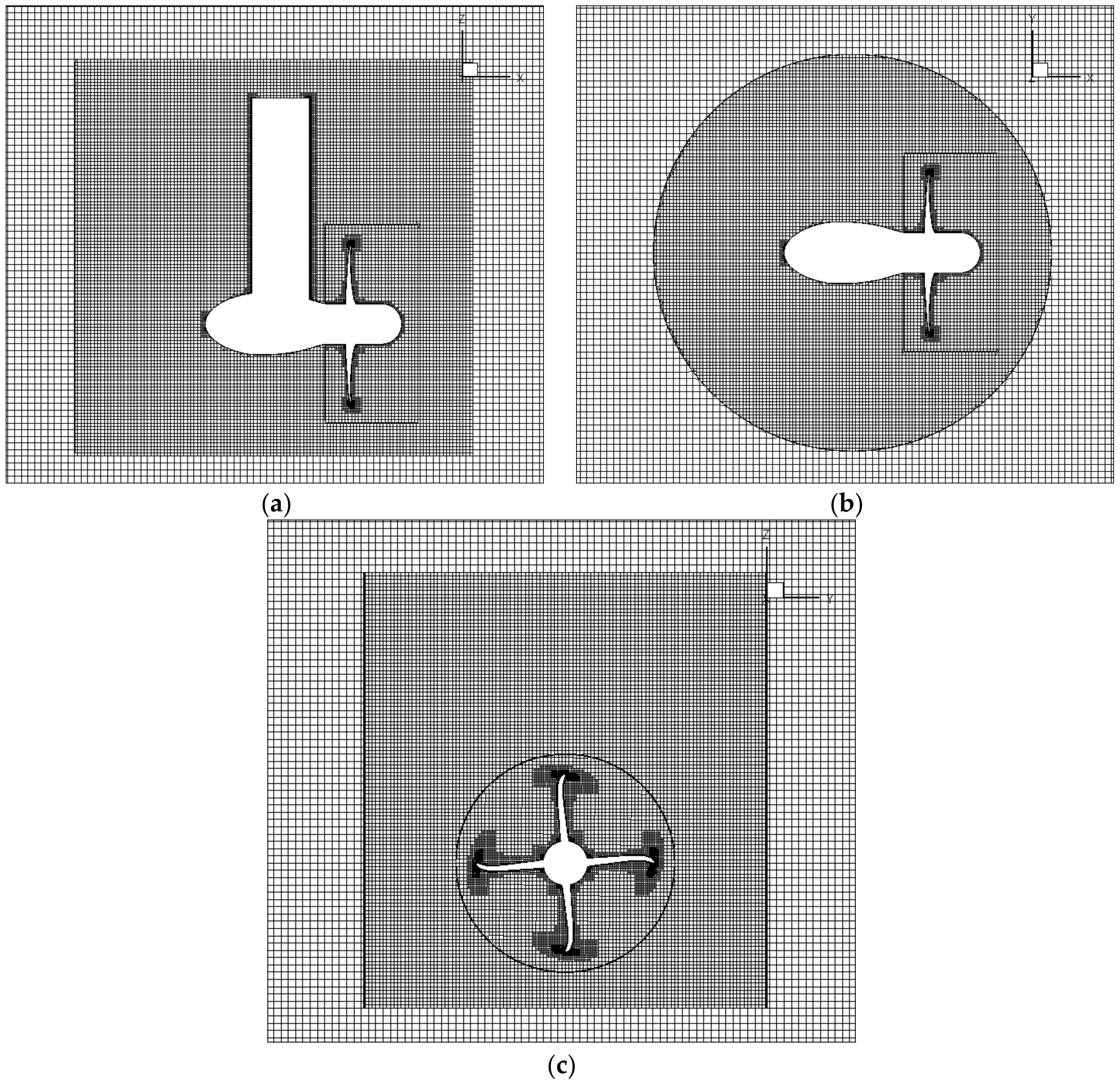
Figure 8 shows the fluid domain grid of the fine grid.
Table 2 lists the thrust and torque coefficients of the propeller under three grid conditions. The time step corresponds to the time that the propeller rotated 1°. The experimental data were obtained from the work conducted by Zhao et al. [
22]. The simulation in
Table 2 selects the steady-state conditions. The inlet velocity coefficient selected was
J = 0.2, and the oblique flow angle was 0°. The results show that, as the grid size decreases, the error in the thrust coefficient
KTPx decreases. The error is only 1.11% under the fine grid conditions. The error of the torque coefficient
KQPx is reduced as the grid size decreased; it is least at 3.19% for the fine grid condition.
Figure 9 shows the pressure distribution of the propeller for the medium and fine grids. From the area marked by the circles in
Figure 9a, it can be seen that both medium and fine grids clearly demonstrate the flow phenomenon and turbulence characteristics of the paddle surface. We selected the medium grid for the next step because the fine grid took too long to compute and required considerable amount of computational resources.
Cp, the pressure coefficient, is defined as follows:
where
is the pressure and
U is the linear velocity at the propeller tip.
4.2. Hydrodynamic Performance of the Podded Propeller
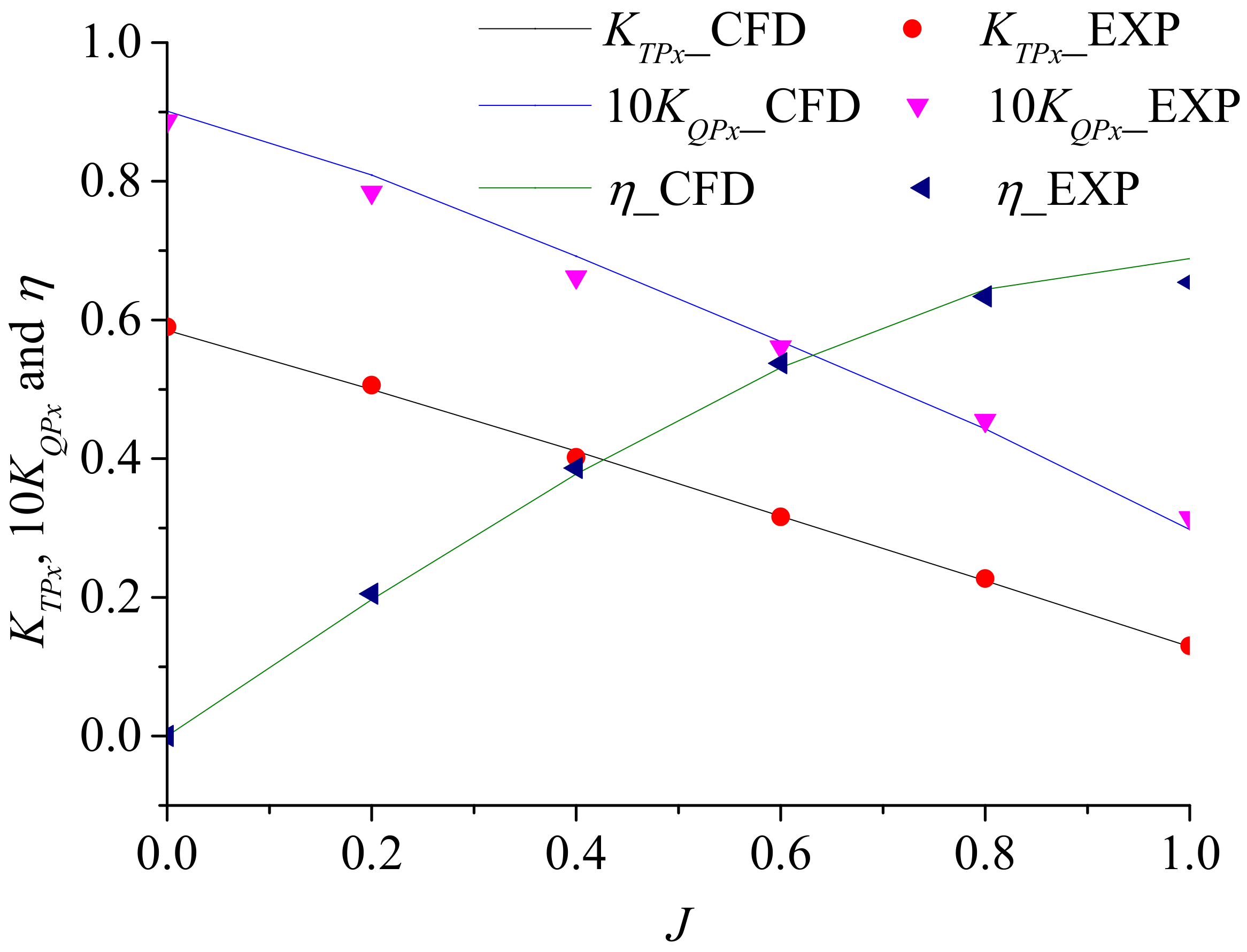
Figure 10 shows a comparison of the hydrodynamic loads between the numerical and test results. The numerical simulation, shown in
Figure 10, selects the steady-state condition, the oblique flow angle of 0°, and the selected advance number range of
J = 0.0~1.0. The numerical calculation results are consistent with the experimental results. Choosing
J = 0.2 (working condition selected in this study), the errors of the thrust coefficient, torque coefficient, and propulsion efficiency of the propeller are all below 5%. Thus, the results validate our choice of using the RANS approach in this study.
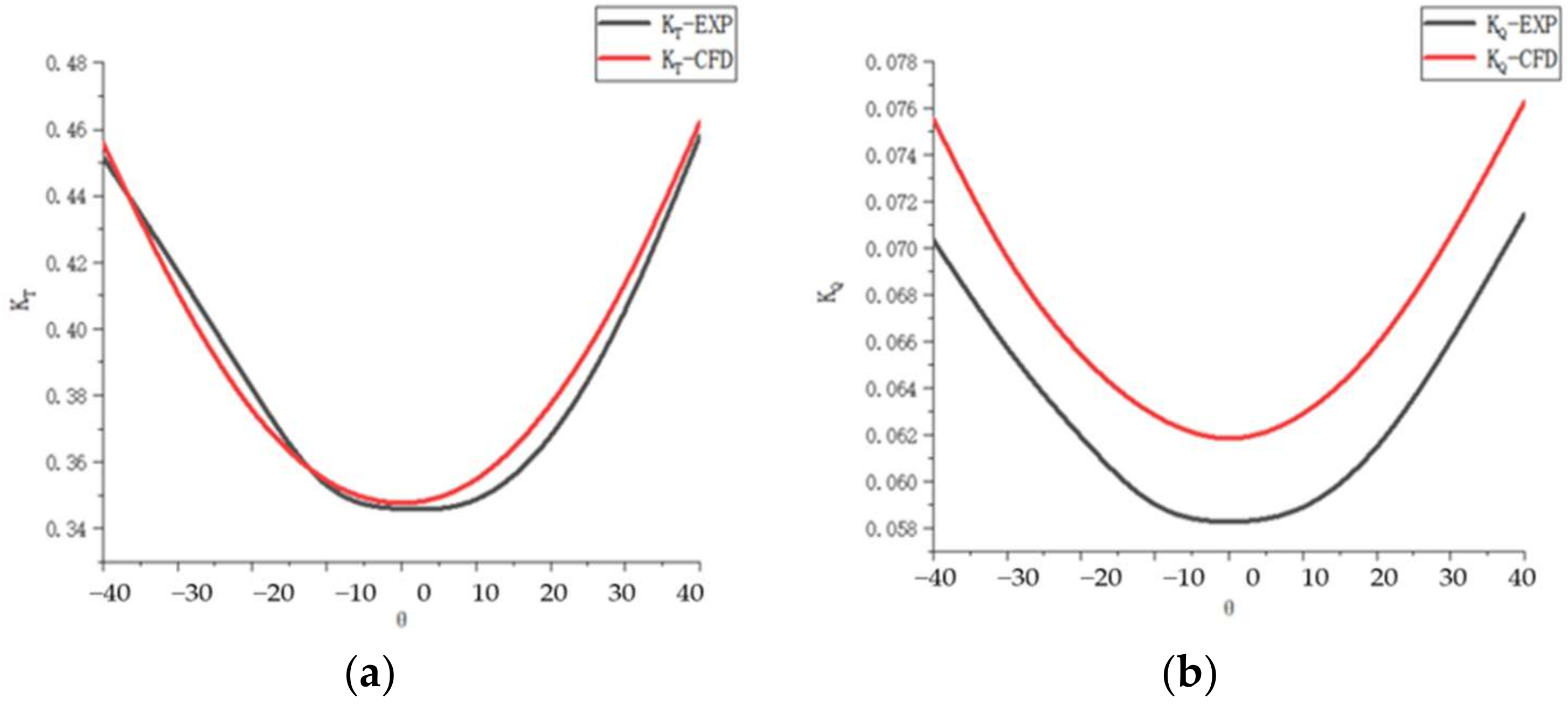
Figure 11 is the comparison between the numerical simulation and the experiment under the towed conditions of podded propeller, and the steering angle of podded propulsor is from −40° to 40°, with the interval of 10°; there are a total of nine working conditions. Choosing
J = 0.6, the rotational speed of the propeller is 10 rps, the inlet velocity is 0.9 m/s. The data of the experimental part come from the work carried out by XU J et al. [
10]. It can be observed from the figure that in the numerical simulation and experiment, the relative error of propeller thrust coefficient is within 3%, and the relative error of torque coefficient is mostly less than 7%.
6. Conclusions
In this study, the hydrodynamic performance of the pushing-pod thruster is determined via RANS simulation using the SST k–ω turbulence model. In particular, the hydrodynamic characteristics at J = 0.2 are comprehensively investigated. This paper systematically studies the hydrodynamic performance of the propeller of a cabin thruster at different angles of attack under steady-state and maneuvering conditions using numerical simulations and experimental verification. The thrust coefficient has a maximum error of 3% and the torque coefficient has a maximum error of 7%, as determined by a comparison of experimental and numerical results. Moreover, a comparative analysis of the hydrodynamic forces between maneuvering and steady-state conditions is performed.
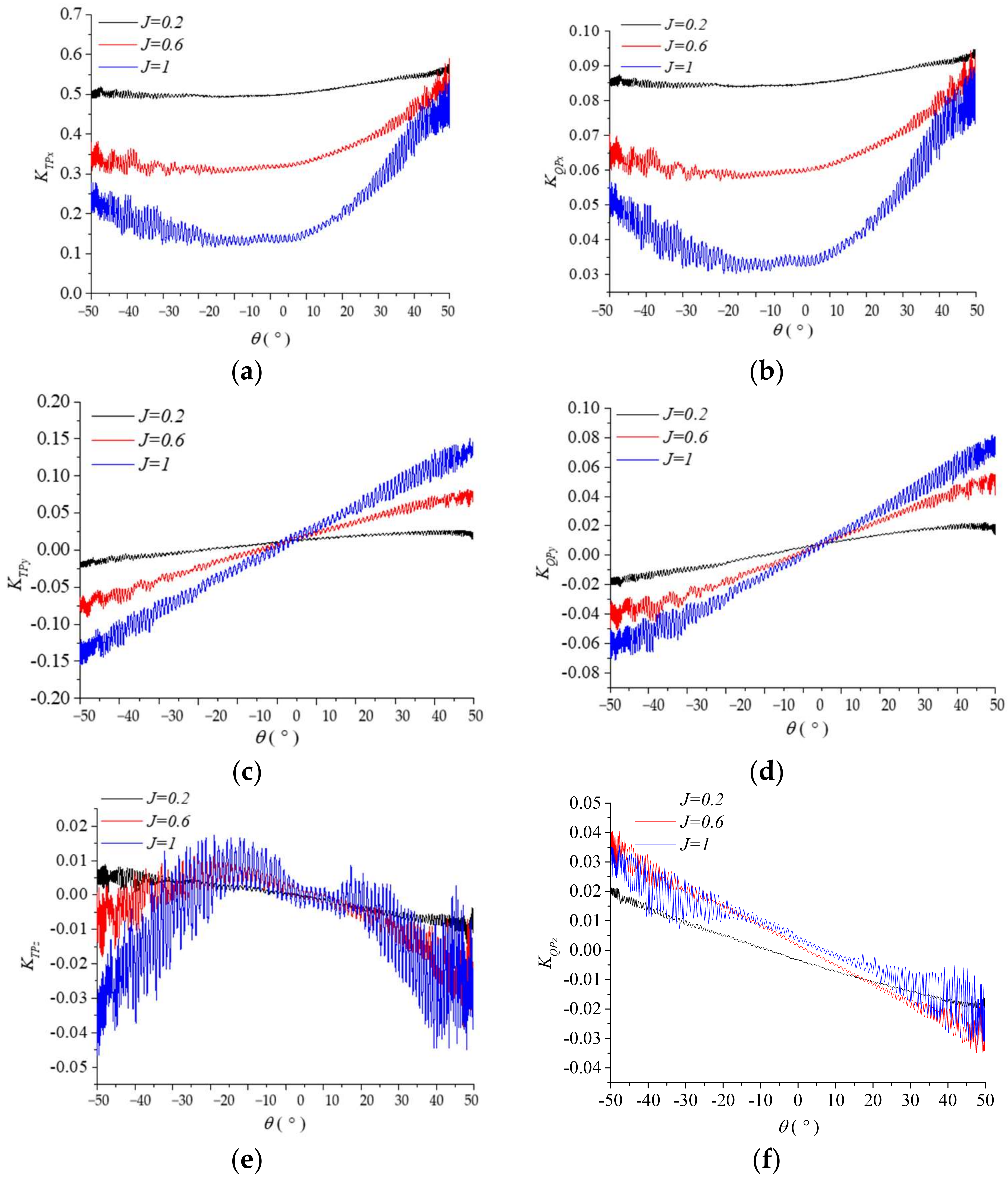
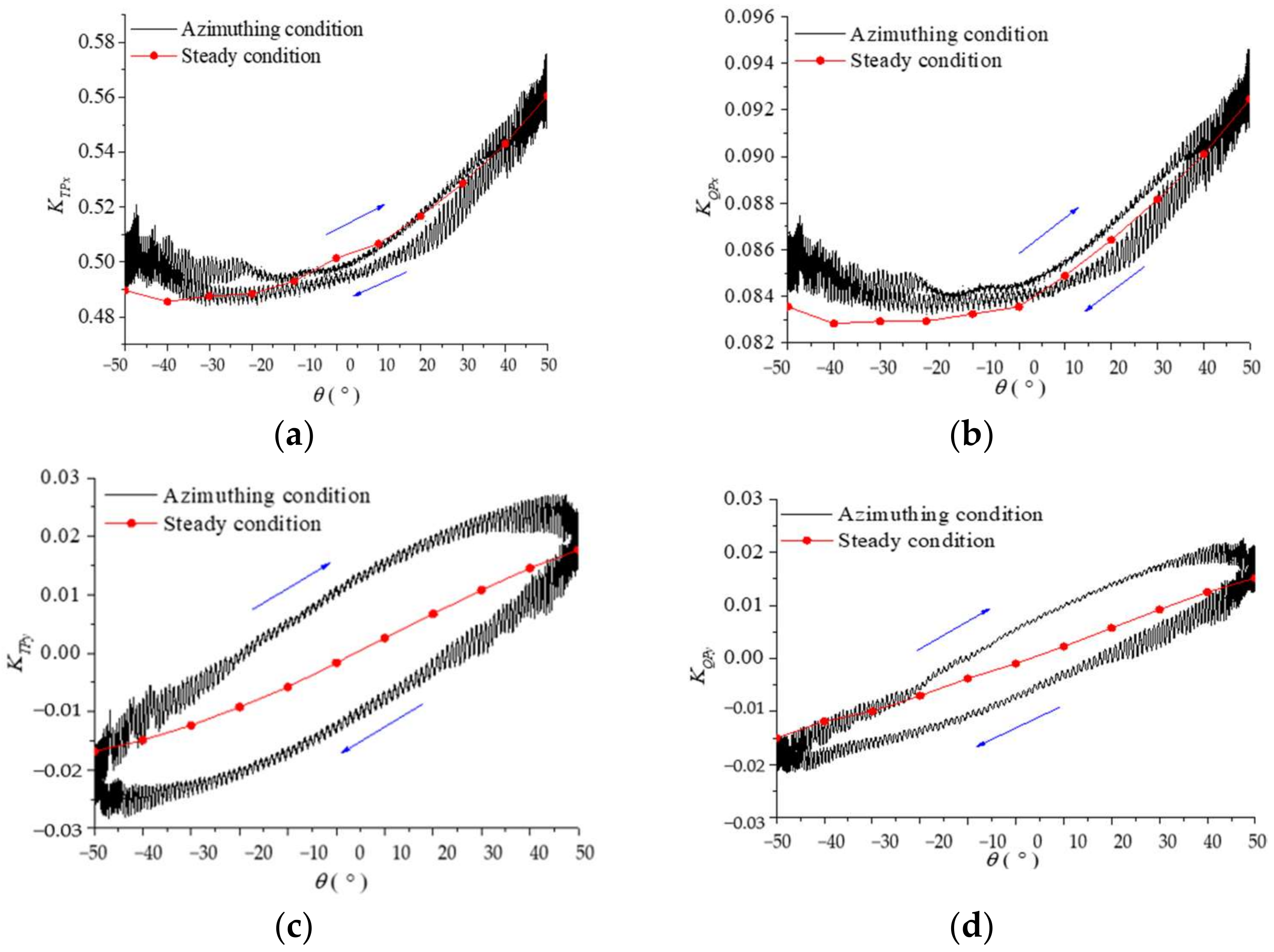
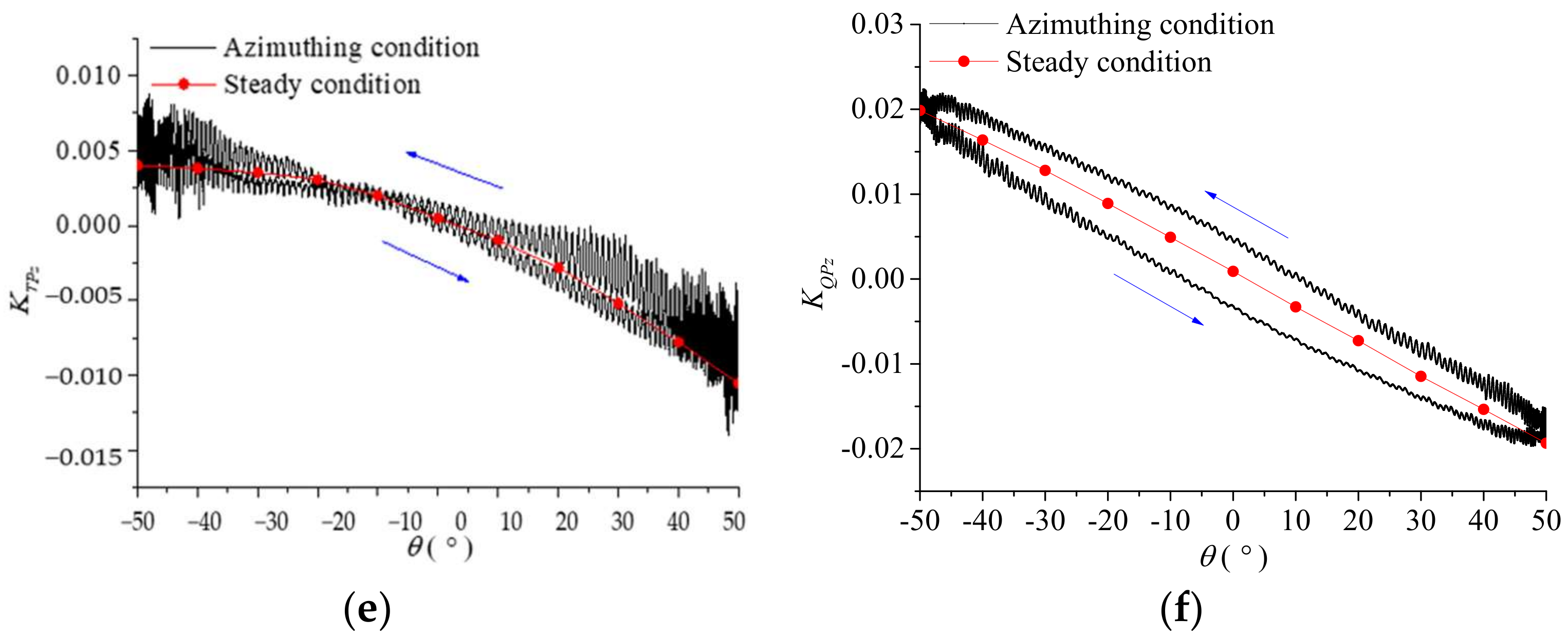
In fact, the hydrodynamic performance of the podded propeller will change under maneuvering conditions due to the influence of inflow velocity and swinging angle of the pod unit. For example, the thrust coefficients curve KTPx and the torque coefficients curve KQPx in the paddle X-direction will decrease as the advance number increases. During the swing process of the pod unit, the values of KTPx and KQPx will increase with the increase in the swing angle. It is interesting that under operating conditions, the disturbance effect of the pod unit on the flow field results in a greater load on the blade surface when the propeller is at a positive oblique flow angle. Therefore, we can see that when the pod unit swings to a positive angle, the value of KTPx and KQPx is significantly greater than the symmetrical negative angle. For KTPy, under direct flow conditions, the value of the pod unit is 0.011 when rotating from starboard to port and −0.014 when rotating from port to starboard, with a difference of 21.4%. The value of KQPz is −0.003 when the pod unit rotates from starboard to positive, and the value is 0.0045 when it rotates from positive to starboard under maneuvering conditions, with a difference of 50%. On the other hand, the value of KQPz is 0 under steady-state conditions.
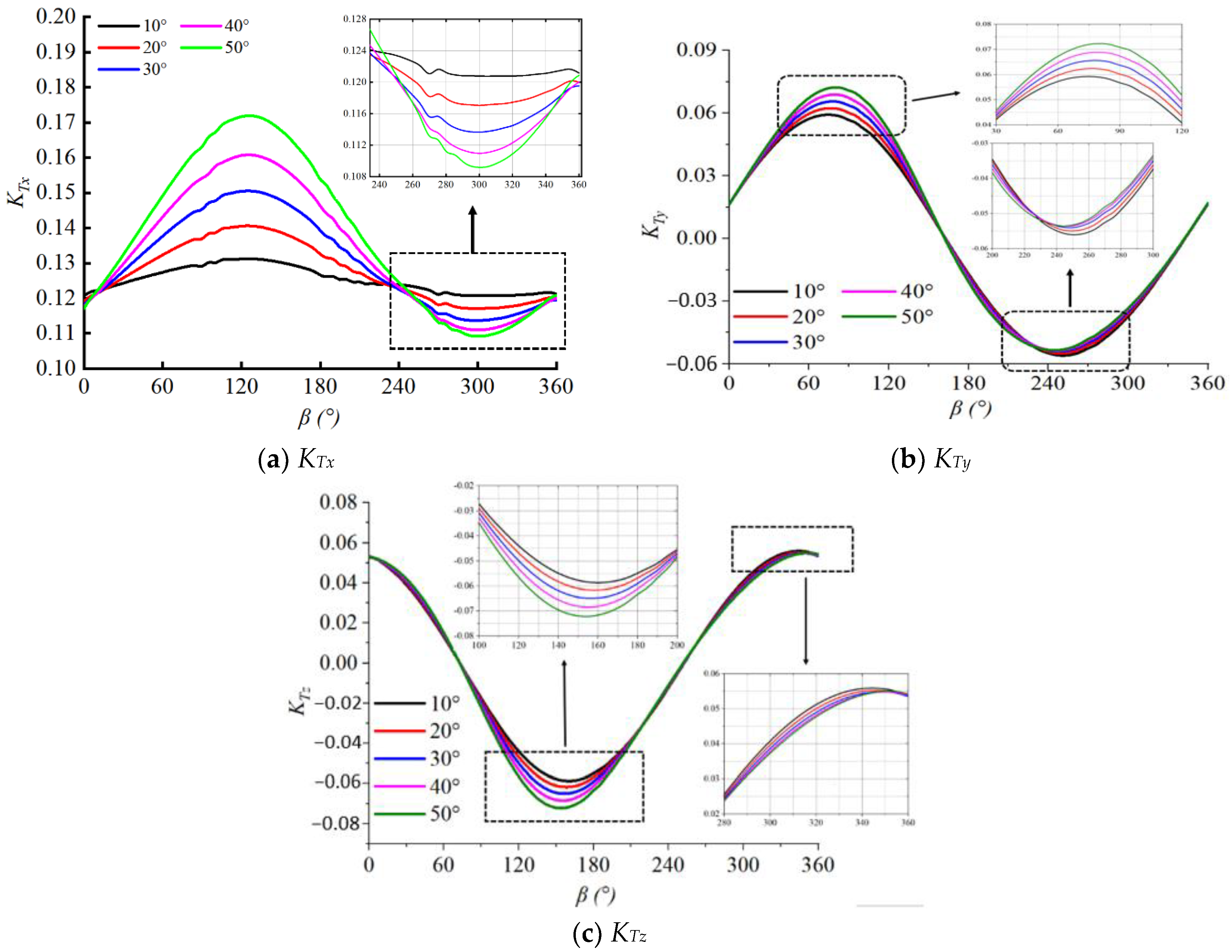
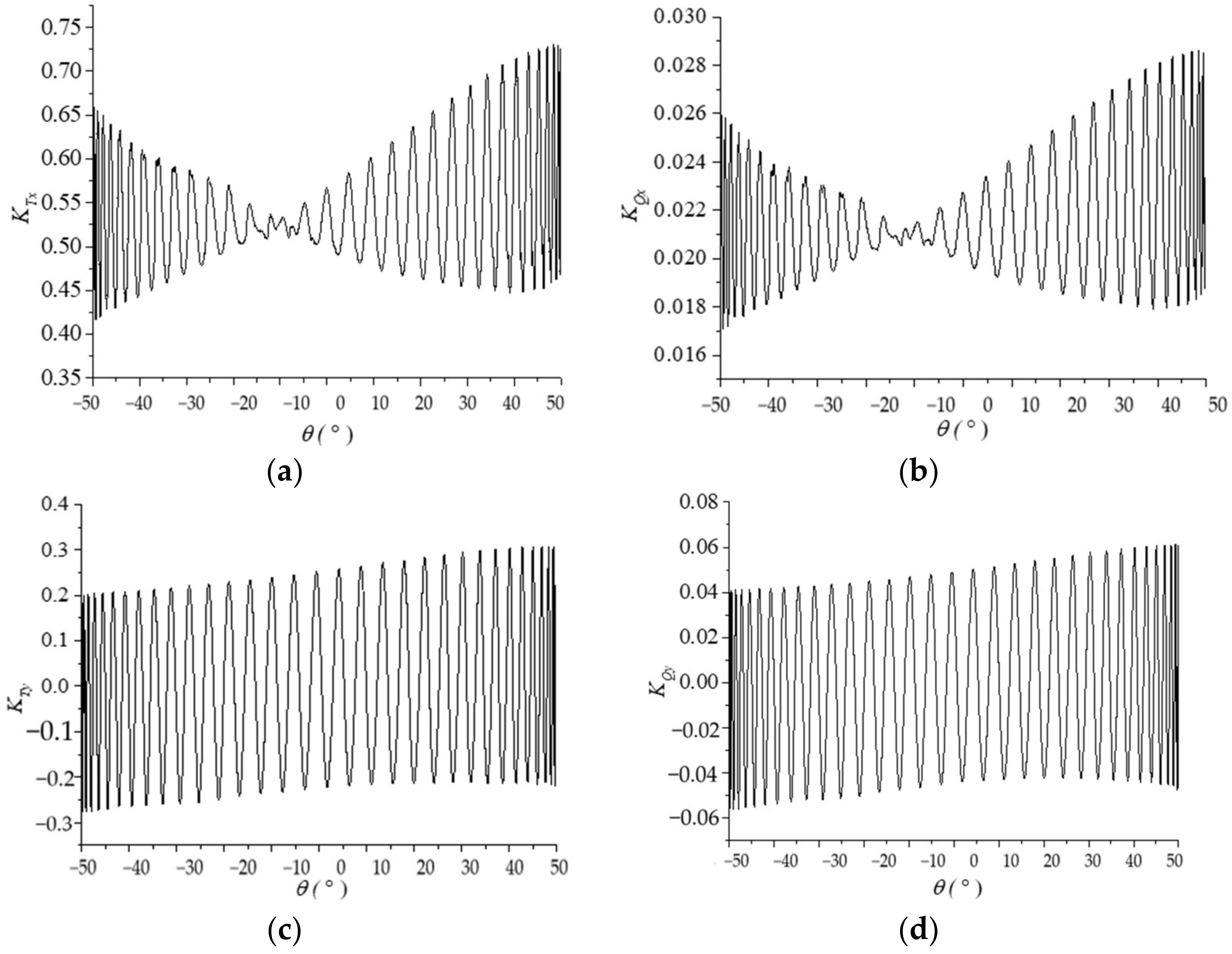
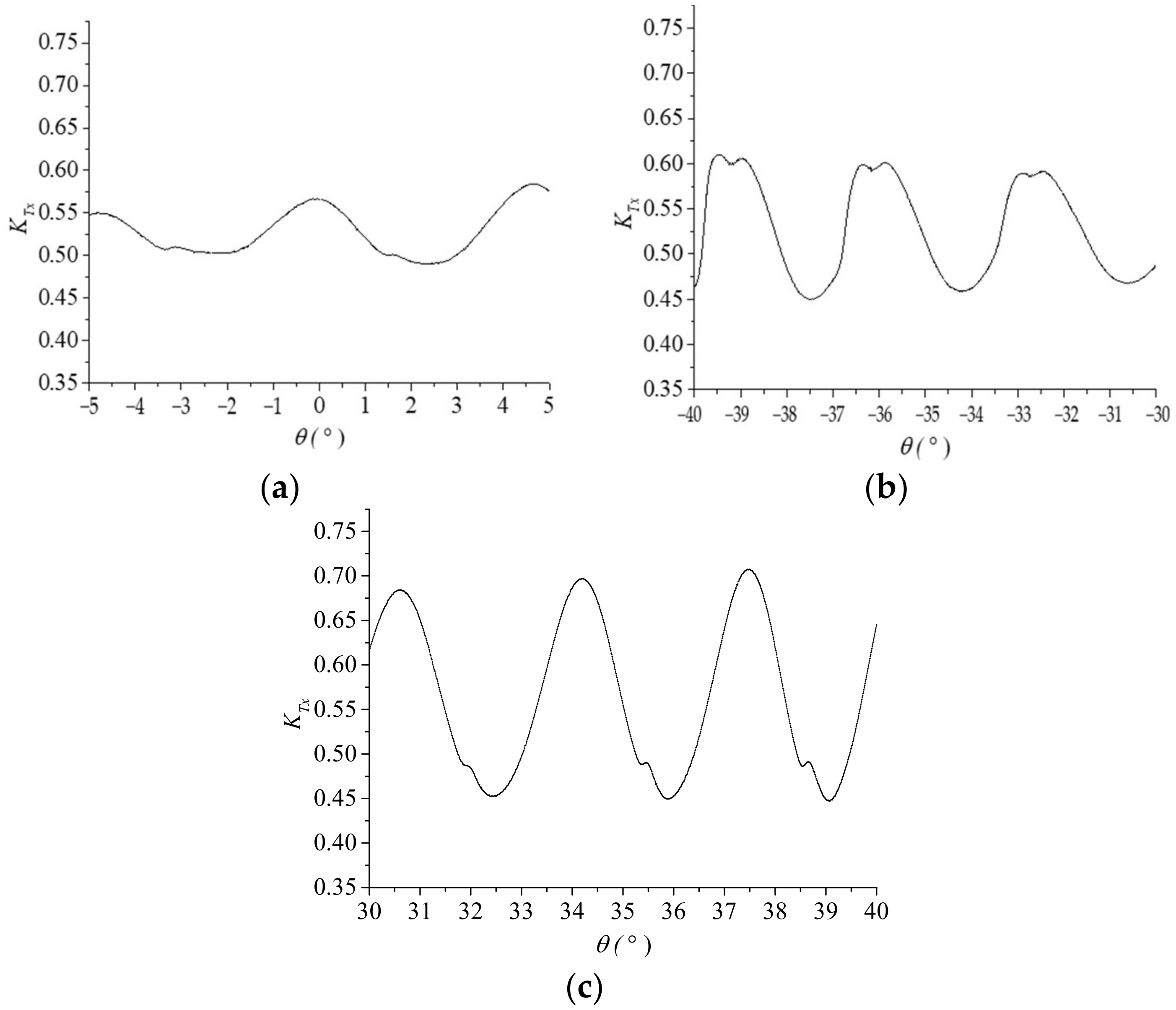
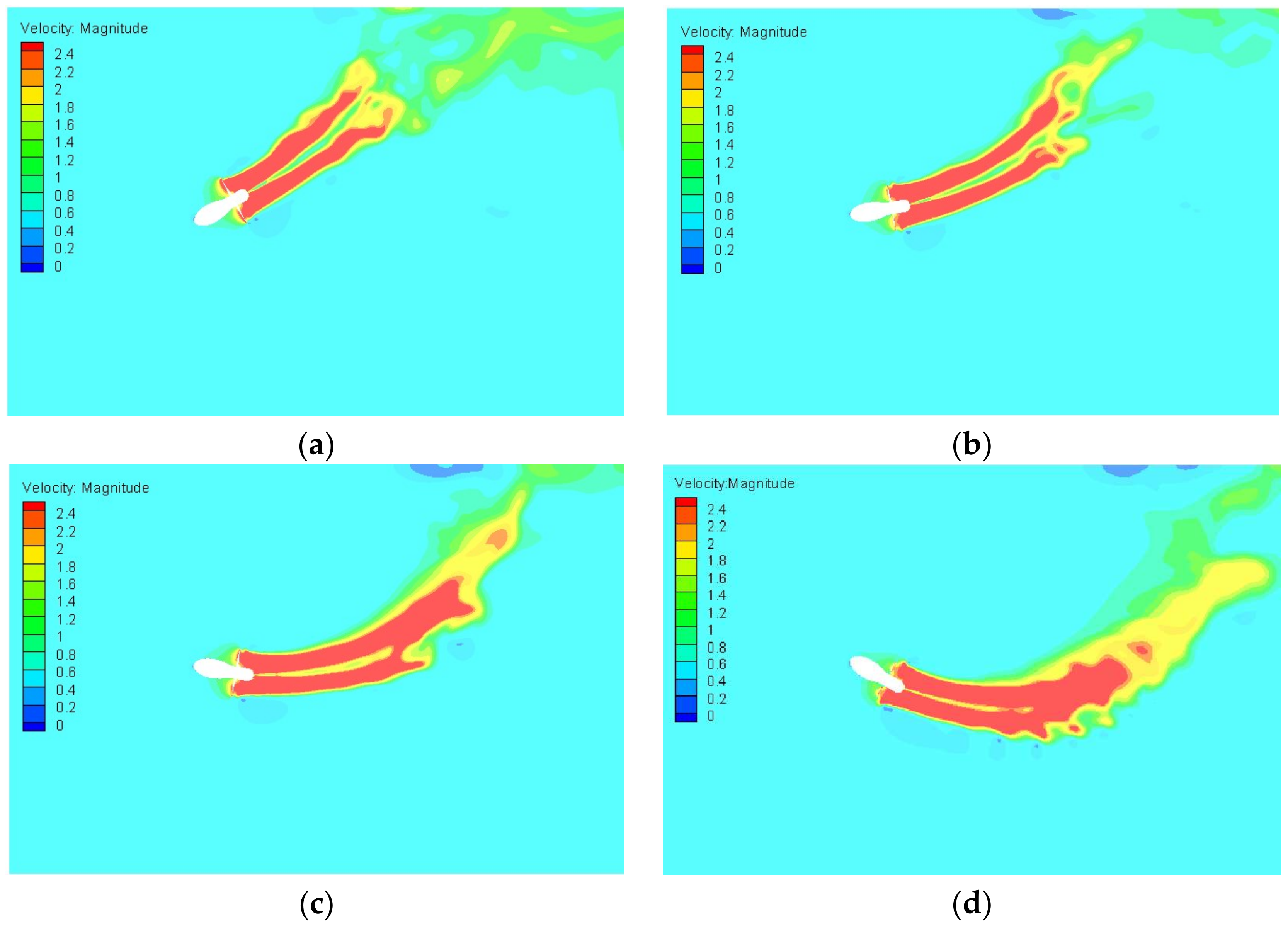
The single-blade load of the propeller is related to the diagonal flow angles. Under steady-state conditions, the value of KTx curve peak is positively correlated with the diagonal flow angles. Under maneuvering conditions, the wave amplitude is positively correlated with the diagonal flow angles, and the mean and peak values at the positive oblique flow angle are larger than those at the symmetrical negative oblique flow angle. The wake flow field of the propeller is curved owing to the rotational effect of the pod unit under the maneuvering conditions. This study provides a reference for the subsequent design of podded propellers and for the optimization ships’ shape.
The next step of the work will be to conduct experimental research on the hydrodynamic characteristics of the podded propeller under maneuvering conditions.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}