
Analysis and Compensation of Installation Perpendicularity Error in Unmanned Surface Vehicle Electro-Optical Devices by Using Sea–Sky Line Images
Abstract
:1. Introduction
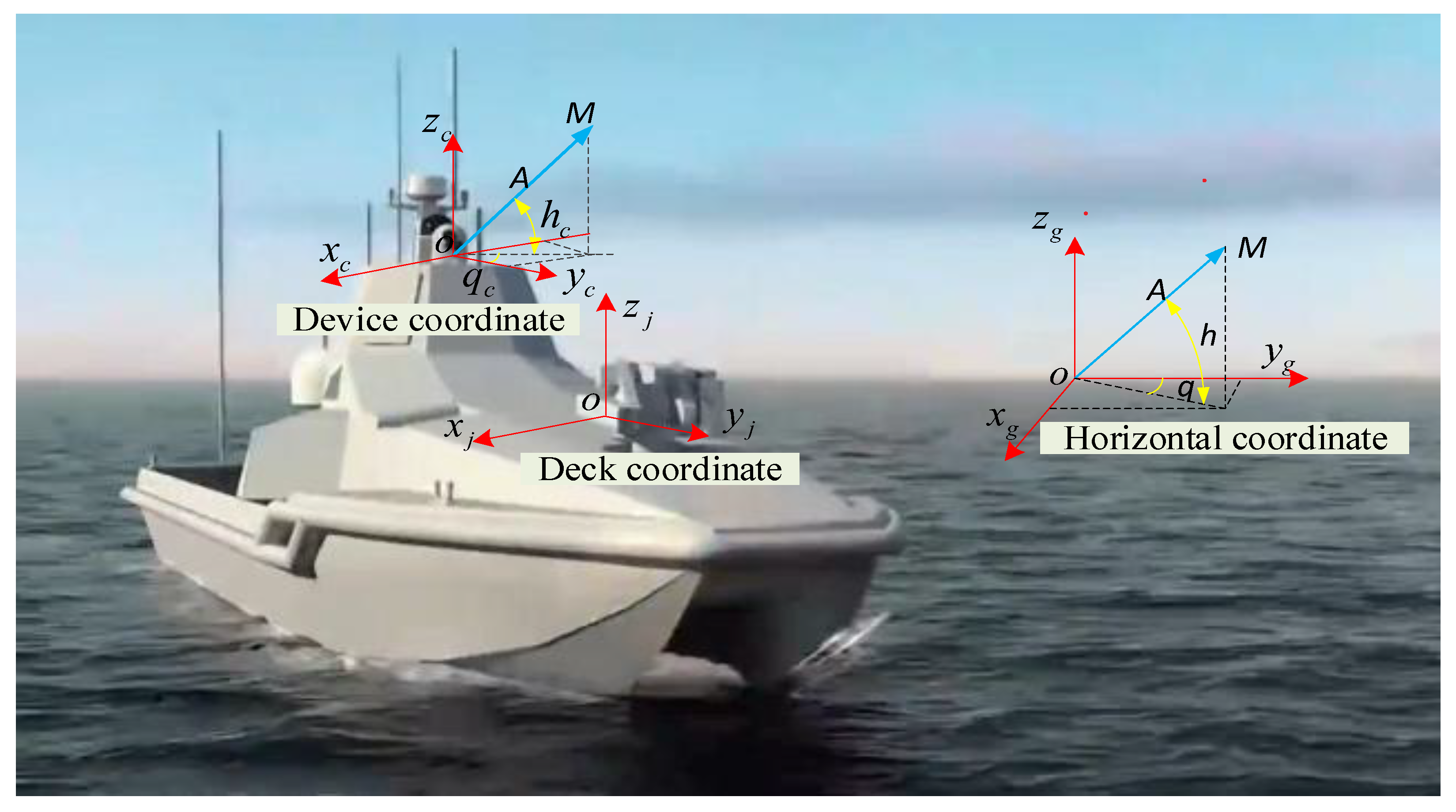
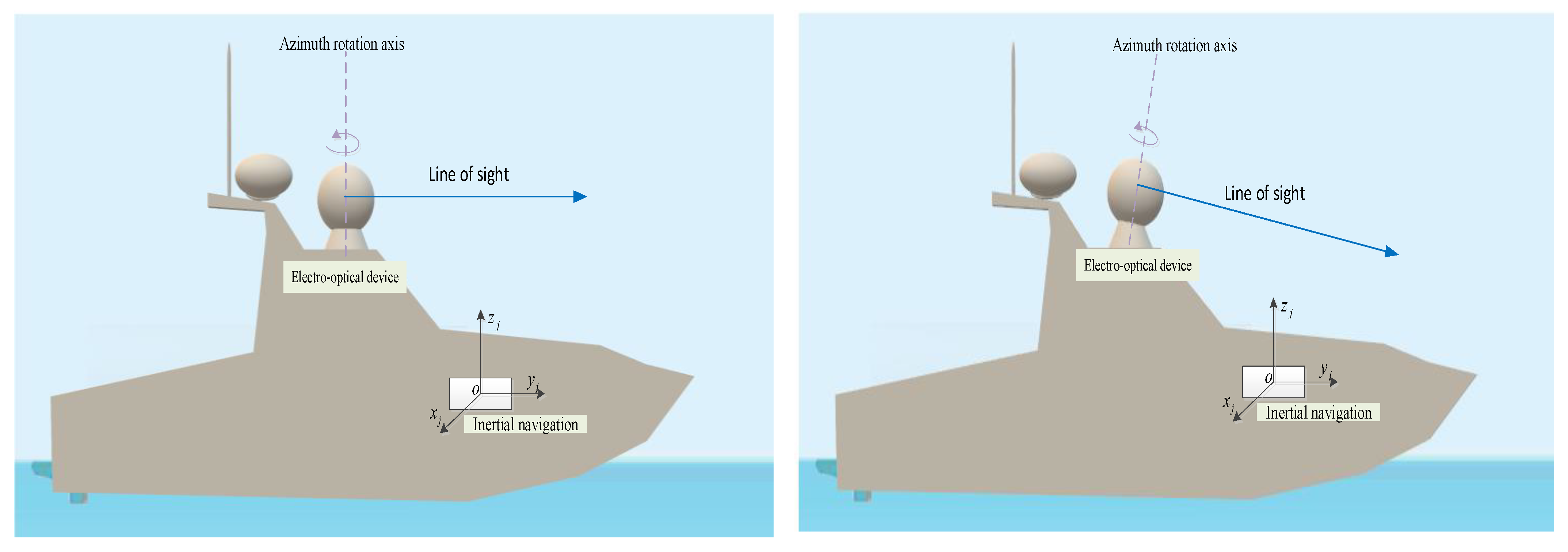
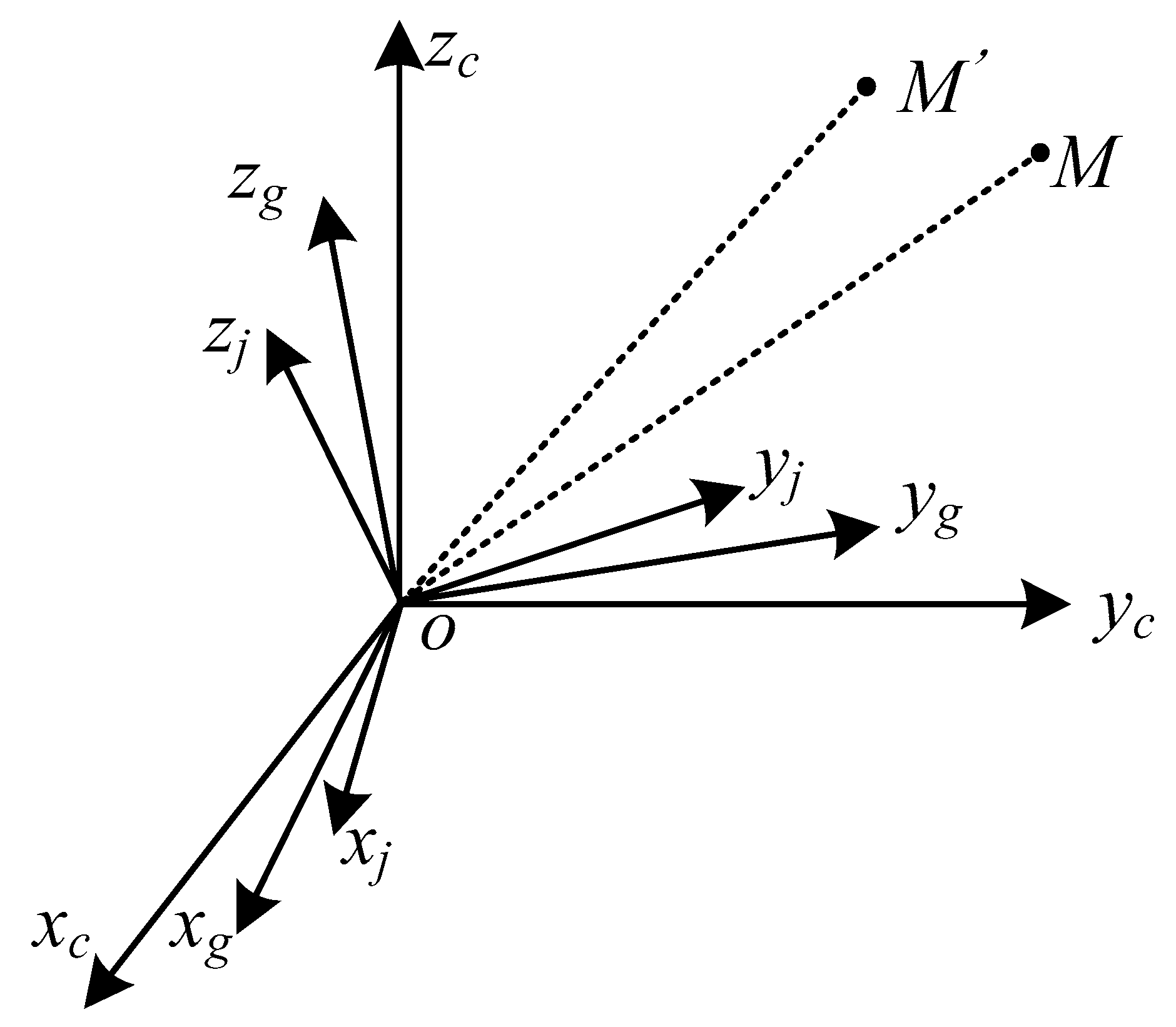
2. LOS Stabilization Representation
3. Influence of the Perpendicularity Error on Stability
- (1)
- Transformation from the device coordinate system to the deck coordinate system
- (2)
- Transformation from the deck coordinate system to the horizon coordinate system transformation
4. Calculation Method of the Perpendicularity Error
5. Error Compensation Method
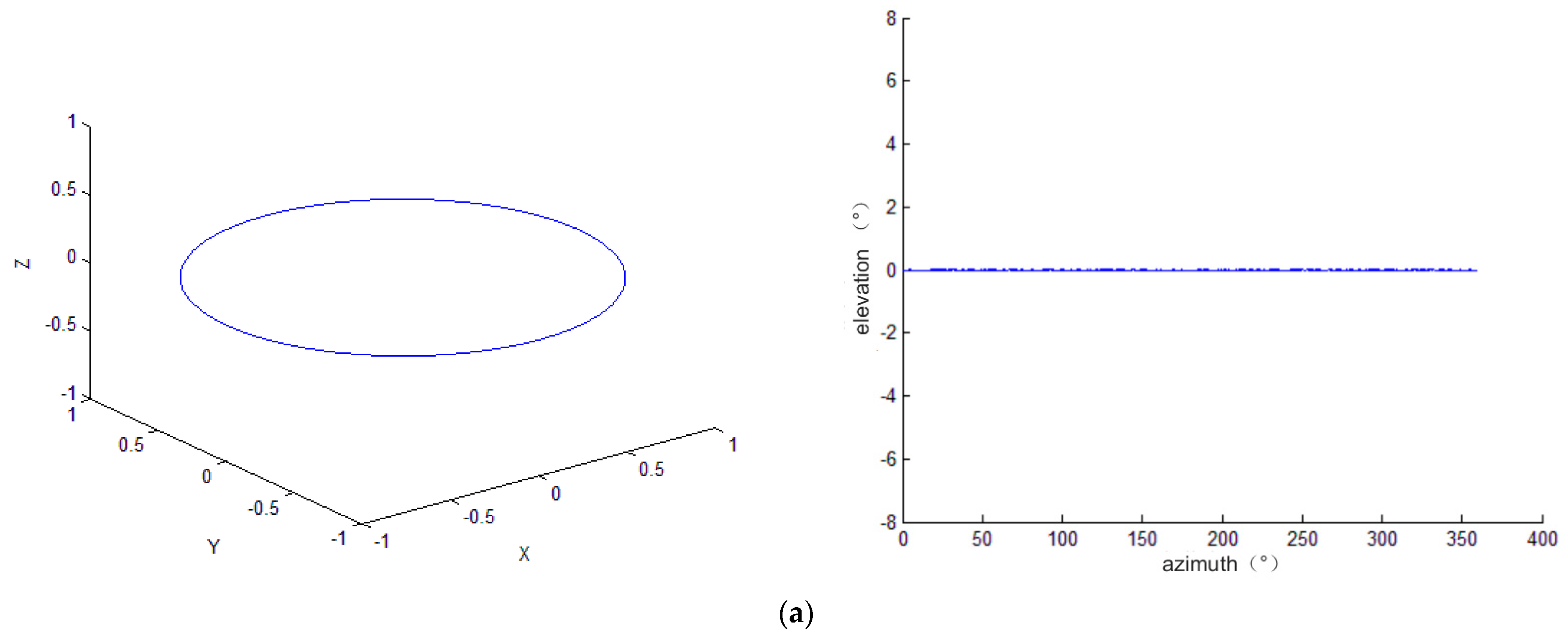
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barrera, C.; Padron, I.; Luis, F.S.; Llinas, O. Trends and challenges in unmanned surface vehicles (Usv): From survey to shipping. TransNav 2021, 15, 135–142. [Google Scholar] [CrossRef]
- Villa, J.L.; Paez, J.; Quintero, C.; Yime, E.; Cabrera, J. Design and control of an unmanned Surface vehicle for environmental monitoring applications. In Proceedings of the 2016 IEEE Colombian Conference on Robotics and Automation (CCRA), Bogota, Colombia, 29–30 September 2016; pp. 1–5. [Google Scholar]
- Kim, M.; Joung, T.-H.; Jeong, B.; Park, H.-S. Autonomous shipping and its impact on regulations, technologies, and industries. J. Int. Marit. Saf. Environ. Affairs Ship. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.-r.; Mohammadi-Aghdam, A.; Kiapei, A.; Salmani-Zakaria, Y.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an Unmanned Surface Vehicle (USV) by algorithms fusion. Ocean Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Barrera, C.; Morales, T.; Moran, R.; Caudet, E.; Marrero, R.; Cianca, A.; Alcaraz, D.; Campuzano, F.; Fernandes, C.; de Sousa, J.T.B. Expanding operational ocean-observing capabilities with gliders across the Macaronesia region. In Proceedings of the Ocean Sciences Meeting 2020, San Diego, CA, USA, 16–21 February 2020. [Google Scholar]
- Setiawan, J.D.; Septiawan, M.A.; Ariyanto, M.; Caesarendra, W.; Munadi, M.; Alimi, S.; Sulowicz, M. Development and Performance Measurement of an Affordable Unmanned Surface Vehicle (USV). Automation 2022, 3, 27–46. [Google Scholar] [CrossRef]
- Han, J.; Kim, J. Three-dimensional reconstruction of a marine floating structure with an unmanned surface vessel. IEEE J. Ocean. Eng. 2018, 44, 984–996. [Google Scholar] [CrossRef]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Lamonaca, F. Sensors and measurements for unmanned systems: An overview. Sensors 2021, 21, 1518. [Google Scholar] [CrossRef] [PubMed]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Wang, H.; Fu, Z.; Zhou, J.; Fu, M.; Ruan, L. Cooperative collision avoidance for unmanned surface vehicles based on improved genetic algorithm. Ocean Eng. 2021, 222, 108612. [Google Scholar] [CrossRef]
- Liu, T.; Pang, B.; Zhang, L.; Yang, W.; Sun, X. Sea surface object detection algorithm based on YOLO v4 fused with reverse depthwise separable convolution (RDSC) for USV. J. Mar. Sci. Eng. 2021, 9, 753. [Google Scholar] [CrossRef]
- Zhang, W.; Gao, X.-Z.; Yang, C.-F.; Jiang, F.; Chen, Z.-Y. A object detection and tracking method for security in intelligence of unmanned surface vehicles. J. Ambient. Intell. Humaniz. Comput. 2020, 10, 1279–1291. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, N.; Park, Y.W.; Won, C.S. Object detection and classification based on YOLO-V5 with improved maritime dataset. J. Mar. Sci. Eng. 2022, 10, 377. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; García, J.M.V.; Malkamäki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S. Sensors and AI techniques for situational awareness in autonomous ships: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 64–83. [Google Scholar] [CrossRef]
- Cormack, D.; Schlangen, I.; Hopgood, J.R.; Clark, D.E. Joint registration and fusion of an infrared camera and scanning radar in a maritime context. IEEE Trans. Aerosp. Electr. Syst. 2019, 56, 1357–1369. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.s.; Kim, S.Y. Autonomous collision detection and avoidance for ARAGON USV: Development and field tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.-Z.; Zang, F.-N. Ship detection for visual maritime surveillance from non-stationary platforms. Ocean Eng. 2017, 141, 53–63. [Google Scholar] [CrossRef]
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Video processing from electro-optical sensors for object detection and tracking in a maritime environment: A survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, X.; Liu, Q.; Ma, R.; Lu, M.; Lin, J.; Ma, M. Modeling and Simulation Analysis of Optical Axis Pointing Error of Aerial Complex Optomechanical System. In Proceedings of the 2019 International Conference on Modeling, Simulation and Big Data Analysis (MSBDA 2019), Wuhan, China, 23–24 June 2019; pp. 119–123. [Google Scholar]
- Wu, F.; Li, S.; Zhu, H.; An, C.; Cai, J.; Du, P.; Wang, C.; Cui, X.; Yan, X. Analysis on the optical axis error of the spherical shell in the electro-optical system. Optik 2018, 168, 458–461. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, X.; Fan, D. Analysis, modeling and correction of pointing errors for electro-optical detection systems. Acta Aeronaut. Astronaut. Sin. 2011, 32, 2042–2054. [Google Scholar]
- Huang, L.; Ma, W.; Huang, J. Modeling and calibration of pointing errors with alt-az telescope. New Astron. 2016, 47, 105–110. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, H.; Liu, Q.; Lin, J. Modeling and optimization of the integrated TDICCD aerial camera pointing error. Appl. Opt. 2020, 59, 8196–8204. [Google Scholar] [CrossRef]
- Masten, M.K. Inertially stabilized platforms for optical imaging systems. IEEE Contr. Syst. Mag. 2008, 28, 47–64. [Google Scholar]
- Tang, Q.; Yang, Q.; Wang, X.; Forbes, A.B. Pointing error compensation of electro-optical detection systems using Gaussian process regression. Int. J. Metrol. Qual. Eng. 2021, 12, 22. [Google Scholar] [CrossRef]
- Huang, B.; Li, Z.H.; Tian, X.Z.; Yang, L.; Zhang, P.J.; Chen, B. Modeling and correction of pointing error of space-borne optical imager. Optik 2021, 247, 167998. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame i | Azimuth (°) | Pitch (°) | Roll (°) | (°) | Pixels | (°) |
|---|---|---|---|---|---|---|
| 1 | 0.02 | −2.79 | 0.09 | 0.04 | 102 | 0.925416667 |
| 2 | 0.89 | −1.92 | 1.23 | 0.03 | 90 | 0.81125 |
| 3 | 3.94 | 1.31 | 2.75 | −0.03 | 116 | 0.976944444 |
| 4 | 6.91 | 2.44 | 1.22 | 0 | 107 | 0.928819444 |
| 5 | 9.7 | 2.35 | −1.34 | −0.05 | 120 | 0.991666667 |
| 6 | 12.73 | −2.24 | −3.46 | −0.02 | 102 | 0.865416667 |
| 7 | 15.94 | −3.27 | −1.18 | 0.02 | 78 | 0.697083333 |
| 8 | 18.94 | 0.14 | 2.1 | 0.06 | 120 | 1.101666667 |
| 9 | 21.95 | 2.05 | 2.25 | −0.04 | 164 | 1.383611111 |
| 10 | 24.66 | 1.98 | 0.71 | −0.01 | 125 | 1.075069444 |
| 11 | 27.6 | 3.34 | −1.51 | −0.01 | 87 | 0.745208333 |
| 12 | 31.11 | 0.75 | −2.28 | −0.02 | 80 | 0.674444444 |
| 13 | 33.93 | −1.07 | 0.16 | 0.02 | 56 | 0.506111111 |
| 14 | 36.94 | 1.31 | 2 | 0.04 | 68 | 0.630277778 |
| 15 | 39.68 | 2.39 | 1.23 | −0.03 | 146 | 1.237361111 |
| 16 | 42.65 | 3.05 | 0.83 | 0.01 | 163 | 1.424930556 |
| 17 | 45.94 | 5.69 | −2.06 | 0 | 42 | 0.364583333 |
| 18 | 49.01 | 4.91 | 0.3 | −0.03 | 48 | 0.386666667 |
| 19 | 52 | 2.25 | 1.85 | 0 | 38 | 0.329861111 |
| 20 | 54.64 | 2.12 | 1.46 | 0 | 33 | 0.286458333 |
| 21 | 57.64 | 1.88 | 0.34 | 0 | 29 | 0.251736111 |
| 22 | 60.93 | 3.79 | −2.82 | 0 | 13 | 0.112847222 |
| 23 | 63.96 | 4.94 | −1.8 | 0 | 15 | 0.130208333 |
| 24 | 67 | 2.71 | 0.93 | −0.01 | 10 | 0.076805556 |
| 25 | 69.71 | 0.9 | 2.42 | 0.01 | 6 | 0.062083333 |
| 26 | 72.66 | 1.06 | 1.41 | 0 | −11 | −0.095486111 |
| 27 | 76.07 | 3.91 | −1.08 | 0.02 | −14 | −0.101527778 |
| 28 | 78.98 | 1.99 | −2.56 | 0 | −4 | −0.034722222 |
| 29 | 81.95 | 0.08 | 0.62 | 0 | −30 | −0.260416667 |
| 30 | 84.65 | 2.21 | 1.93 | 0.01 | −37 | −0.311180556 |
| 31 | 87.64 | 2.64 | 1.81 | 0 | −38 | −0.329861111 |
| 32 | 90.93 | 1.47 | 0.61 | 0.01 | −41 | −0.345902778 |
| 33 | 93.93 | 0.29 | −2.49 | 0.01 | −55 | −0.467430556 |
| 34 | 96.99 | 0.08 | 0.41 | 0 | −45 | −0.390625 |
| 35 | 99.71 | 0.88 | 1.54 | 0 | −67 | −0.581597222 |
| 36 | 102.69 | 1.17 | 2.03 | 0.03 | −71 | −0.586319444 |
| 37 | 106.04 | −2.54 | 0.1 | 0 | −60 | −0.520833333 |
| 38 | 108.94 | −3.59 | −2.02 | −0.01 | −90 | −0.79125 |
| 39 | 111.96 | 0.08 | −2.24 | 0 | −78 | −0.677083333 |
| 40 | 114.64 | 0.47 | 0.33 | 0 | −67 | −0.581597222 |
| 41 | 117.68 | 0.5 | 2.73 | −0.01 | −83 | −0.730486111 |
| 42 | 120.97 | 3.06 | 1.31 | 0 | −115 | −0.998263889 |
| 43 | 123.95 | 2.65 | −1.84 | −0.02 | −96 | −0.853333333 |
| 44 | 126.97 | 0.79 | −1.84 | −0.02 | −106 | −0.940138889 |
| 45 | 129.64 | 2.36 | −1.02 | −0.02 | −100 | −0.888055556 |
| 46 | 132.65 | 1.23 | 1.4 | −0.01 | −98 | −0.860694444 |
| 47 | 135.94 | 0.17 | 2.02 | 0.01 | −111 | −0.953541667 |
| 48 | 138.95 | 0.77 | 0.19 | 0.01 | −98 | −0.840694444 |
| 49 | 142.02 | 1.1 | −1.39 | −0.02 | −99 | −0.879375 |
| 50 | 145 | 5.22 | −2.34 | 0.01 | −124 | −1.066388889 |
| 51 | 147.67 | 4.39 | −1.17 | 0.02 | −107 | −0.908819444 |
| 52 | 150.64 | 0.88 | 1.35 | −0.01 | −108 | −0.9475 |
| 53 | 153.96 | 0.74 | 2.44 | 0.01 | −123 | −1.057708333 |
| 54 | 156.95 | 0.27 | 0.89 | 0 | −128 | −1.111111111 |
| 55 | 160.04 | 0.06 | −2.05 | 0 | −126 | −1.09375 |
| 56 | 162.71 | 1.7 | −2.22 | 0 | −105 | −0.911458333 |
| 57 | 165.65 | 1.93 | 0.37 | −0.01 | −112 | −0.982222222 |
| 58 | 168.91 | 0.3 | 1.91 | 0.01 | −113 | −0.970902778 |
| 59 | 171.96 | −2.47 | 1.52 | −0.01 | −124 | −1.086388889 |
| 60 | 174.99 | −1.14 | −1.01 | 0 | −119 | −1.032986111 |
| 61 | 177.65 | −1.07 | −1.57 | −0.02 | −104 | −0.922777778 |
| 62 | 180.64 | 0.03 | −1.17 | 0 | −108 | −0.9375 |
| 63 | 183.93 | 0.08 | 0.55 | 0 | −94 | −0.815972222 |
| 64 | 186.95 | 0.5 | 1.72 | 0 | −107 | −0.928819444 |
| 65 | 189.98 | 1.23 | 0.41 | 0.01 | −104 | −0.892777778 |
| 66 | 192.68 | 0.93 | 0.91 | 0 | −105 | −0.911458333 |
| 67 | 195.67 | 2.52 | 0.8 | 0 | −82 | −0.711805556 |
| 68 | 198.94 | 1.84 | 0.78 | 0.01 | −91 | −0.779930556 |
| 69 | 201.93 | 0.57 | 0.66 | 0 | −84 | −0.729166667 |
| 70 | 204.96 | 1.61 | 0.4 | 0 | −65 | −0.564236111 |
| 71 | 207.67 | 2.72 | 0.02 | 0.01 | −86 | −0.736527778 |
| 72 | 210.7 | 0.18 | 0.6 | 0.03 | −65 | −0.534236111 |
| 73 | 213.93 | 2.47 | 0.16 | −0.01 | −62 | −0.548194444 |
| 74 | 216.91 | 0.46 | 0.39 | 0 | −68 | −0.590277778 |
| 75 | 219.96 | 0.37 | 0.02 | −0.02 | −33 | −0.306458333 |
| 76 | 222.71 | 2.64 | 0.51 | 0 | −50 | −0.434027778 |
| 77 | 225.7 | 3.37 | −1.32 | 0.01 | −39 | −0.328541667 |
| 78 | 228.93 | 2.85 | 0.74 | 0 | −47 | −0.407986111 |
| 79 | 231.94 | 0.31 | 1.03 | 0.02 | −33 | −0.266458333 |
| 80 | 234.97 | 0.75 | 1.64 | −0.01 | −18 | −0.16625 |
| 81 | 237.69 | 0.58 | 0.78 | 0.02 | −21 | −0.162291667 |
| 82 | 243.95 | 0.1 | −1.75 | 0.01 | −24 | −0.198333333 |
| 83 | 246.94 | −1.57 | 0.86 | 0 | 8 | 0.069444444 |
| 84 | 249.94 | 0.78 | 1.62 | −0.02 | 5 | 0.023402778 |
| 85 | 252.7 | 0.49 | 1.26 | 0.01 | 9 | 0.088125 |
| 86 | 255.69 | −1.07 | 0.32 | 0 | 32 | 0.277777778 |
| 87 | 258.96 | −1.28 | 0.92 | 0 | 93 | 0.807291667 |
| 88 | 261.94 | 1.97 | 0.14 | 0.02 | 70 | 0.627638889 |
| 89 | 264.95 | 2.94 | 0.92 | −0.01 | 24 | 0.198333333 |
| 90 | 267.7 | 0.16 | 0.88 | 0.02 | 27 | 0.254375 |
| 91 | 270.69 | 0.76 | 0.04 | −0.02 | 42 | 0.344583333 |
| 92 | 273.99 | −2.27 | −1.27 | −0.01 | 39 | 0.328541667 |
| 93 | 276.93 | −3.41 | 0.09 | 0 | 144 | 1.25 |
| 94 | 279.94 | −1.07 | 0.82 | 0 | 149 | 1.293402778 |
| 95 | 282.67 | 0.91 | 1.22 | 0 | 141 | 1.223958333 |
| 96 | 285.69 | −1.45 | 0.23 | 0.02 | 139 | 1.226597222 |
| 97 | 288.98 | 1.56 | −1.8 | −0.01 | 95 | 0.814652778 |
| 98 | 291.99 | 0.81 | 0.85 | 0 | 103 | 0.894097222 |
| 99 | 294.91 | 2.55 | 1.12 | 0 | 81 | 0.703125 |
| 100 | 297.95 | 2.56 | 1.78 | 0 | 82 | 0.711805556 |
| 101 | 300.71 | 2.57 | 0.77 | 0 | 92 | 0.798611111 |
| 102 | 303.74 | 1.55 | −1.57 | 0 | 95 | 0.824652778 |
| 103 | 306.98 | 1.93 | −1.95 | 0.02 | 132 | 1.165833333 |
| 104 | 309.9 | 2.82 | 0.36 | −0.01 | 131 | 1.127152778 |
| 105 | 312.91 | 4.57 | 2.68 | 0 | 135 | 1.171875 |
| 106 | 315.7 | 5.61 | 2.08 | −0.02 | 132 | 1.125833333 |
| 107 | 318.74 | 4.08 | 0.96 | 0 | 112 | 0.972222222 |
| 108 | 322.01 | 4.37 | −2.87 | −0.01 | 106 | 0.910138889 |
| 109 | 325.11 | 4.58 | −1.5 | 0 | 96 | 0.833333333 |
| 110 | 327.98 | 2.7 | 0.65 | −0.01 | 93 | 0.797291667 |
| 111 | 330.66 | 0.56 | 2.67 | 0 | 107 | 0.928819444 |
| 112 | 333.65 | 1.03 | 2.71 | 0 | 150 | 1.302083333 |
| 113 | 336.93 | 3.32 | −1.59 | 0 | 135 | 1.171875 |
| 114 | 340 | 2.31 | −4.48 | −0.03 | 109 | 0.916180556 |
| 115 | 342.92 | 0.96 | −1.8 | −0.03 | 89 | 0.742569444 |
| 116 | 345.67 | 0.3 | 1.36 | −0.01 | 91 | 0.779930556 |
| 117 | 348.66 | −1.28 | 3.89 | 0.01 | 95 | 0.834652778 |
| 118 | 351.89 | 1.76 | 1.63 | 0.02 | 120 | 1.061666667 |
| 119 | 355.04 | 1 | −4.19 | −0.02 | 112 | 0.952222222 |
| 120 | 357.96 | −2.78 | −3.8 | 0 | 89 | 0.772569444 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Chen, J.; Wu, X.; Liang, H.; Zheng, Z.; Zhu, C.; Liu, Y.; Sun, C.; Wang, C.; He, D. Analysis and Compensation of Installation Perpendicularity Error in Unmanned Surface Vehicle Electro-Optical Devices by Using Sea–Sky Line Images. J. Mar. Sci. Eng. 2023, 11, 863. https://doi.org/10.3390/jmse11040863
Zheng J, Chen J, Wu X, Liang H, Zheng Z, Zhu C, Liu Y, Sun C, Wang C, He D. Analysis and Compensation of Installation Perpendicularity Error in Unmanned Surface Vehicle Electro-Optical Devices by Using Sea–Sky Line Images. Journal of Marine Science and Engineering. 2023; 11(4):863. https://doi.org/10.3390/jmse11040863
Chicago/Turabian StyleZheng, Jia, Jincai Chen, Xinjian Wu, Han Liang, Zhi Zheng, Chuanbo Zhu, Yifan Liu, Chao Sun, Chuanqin Wang, and Dahua He. 2023. "Analysis and Compensation of Installation Perpendicularity Error in Unmanned Surface Vehicle Electro-Optical Devices by Using Sea–Sky Line Images" Journal of Marine Science and Engineering 11, no. 4: 863. https://doi.org/10.3390/jmse11040863