
Numerical Study on the Waterjet–Hull Interaction of a Free-Running Catamaran

Abstract
:1. Introduction
2. Geometry
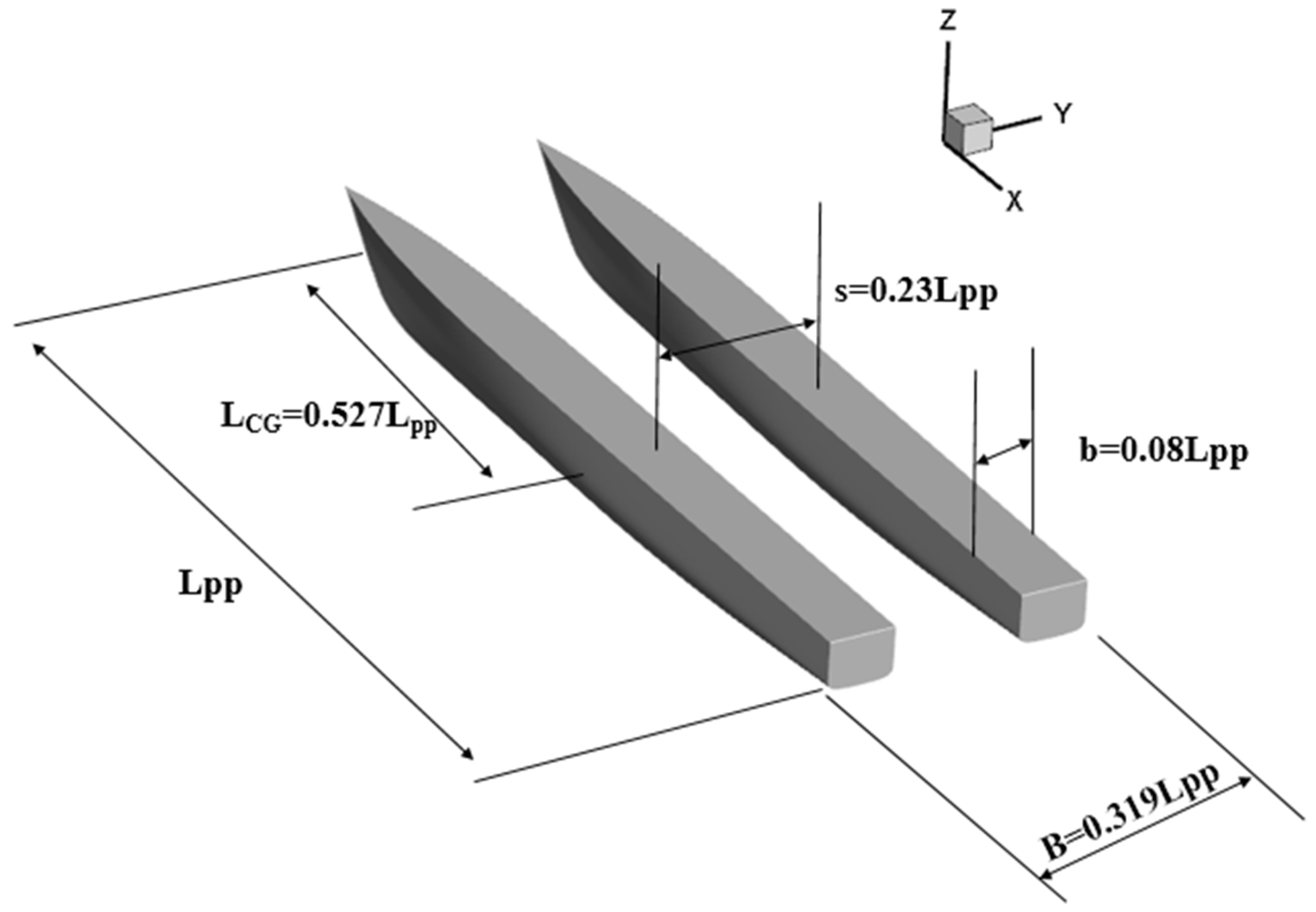
2.1. Hull Geometry
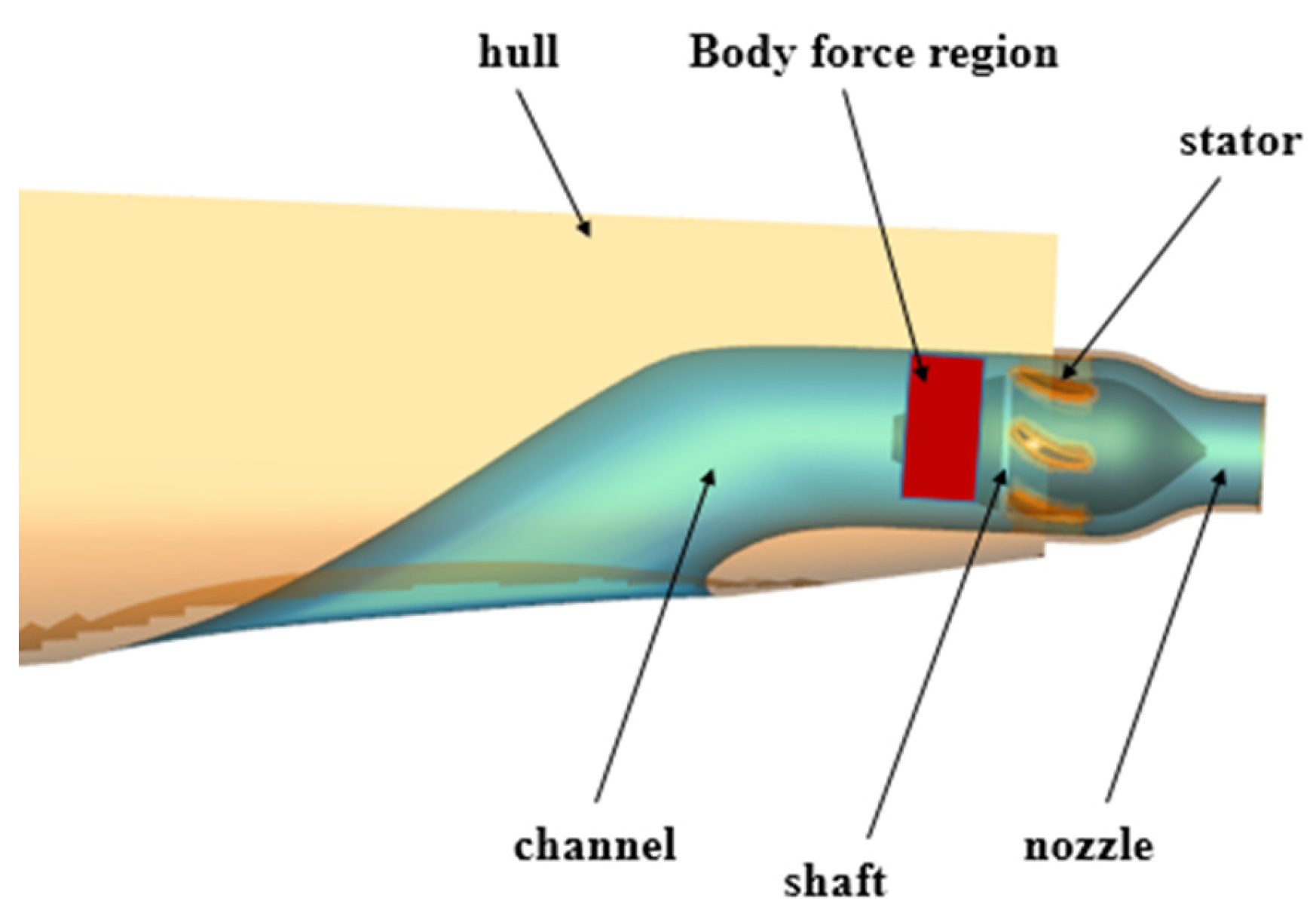
2.2. Waterjet Geometry
3. Numerical Methods
3.1. Governing Equation and Turbulence Model
3.2. Prediction of the Free Surface
3.3. Prediction of the Ship Motion
3.4. Body Force Model
3.5. PI speed Controller
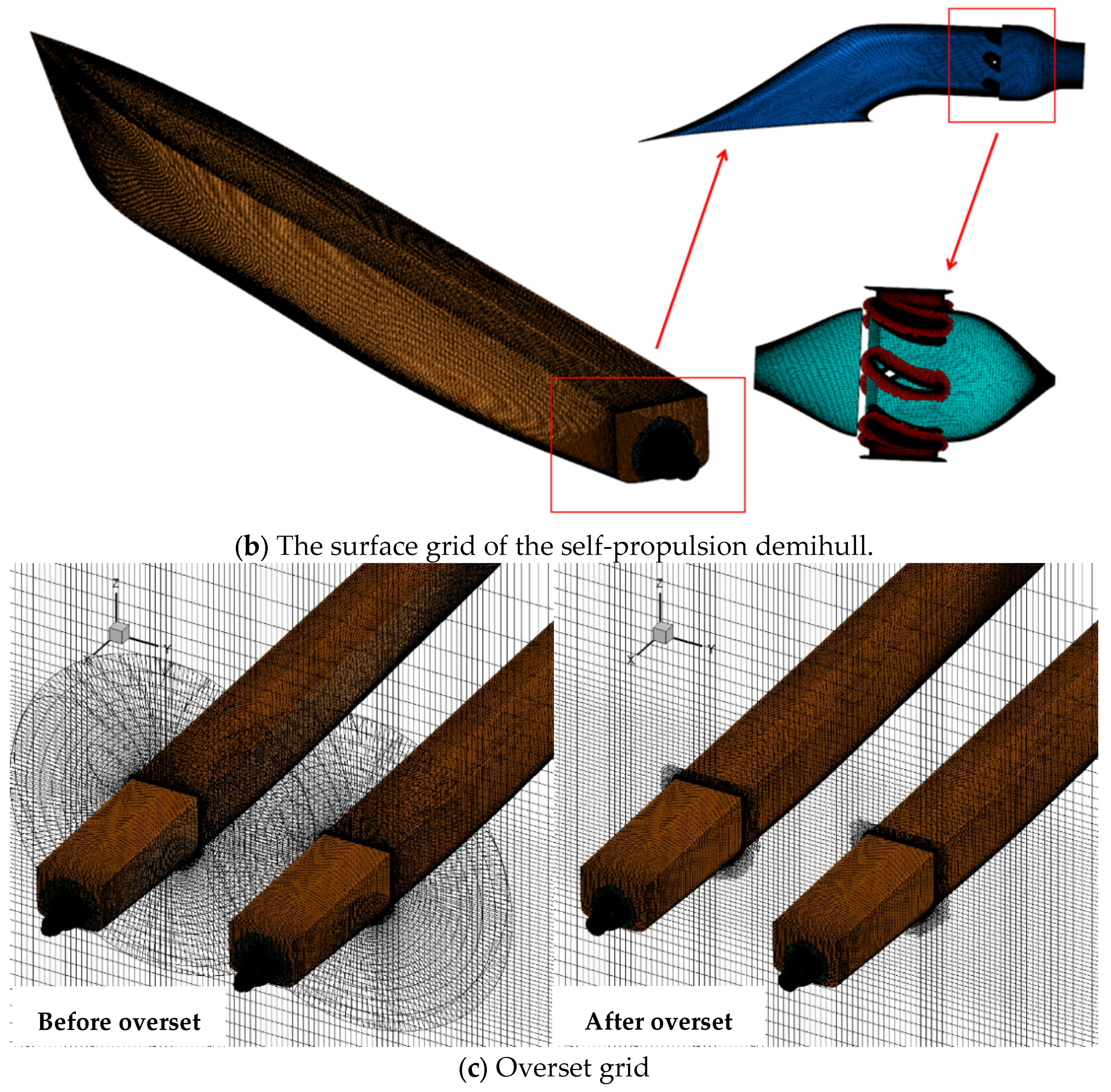
3.6. Overset Grid Method
3.7. Computational Domain and Boundary Conditions
4. Verification and Validation
4.1. Numerical Uncertainty
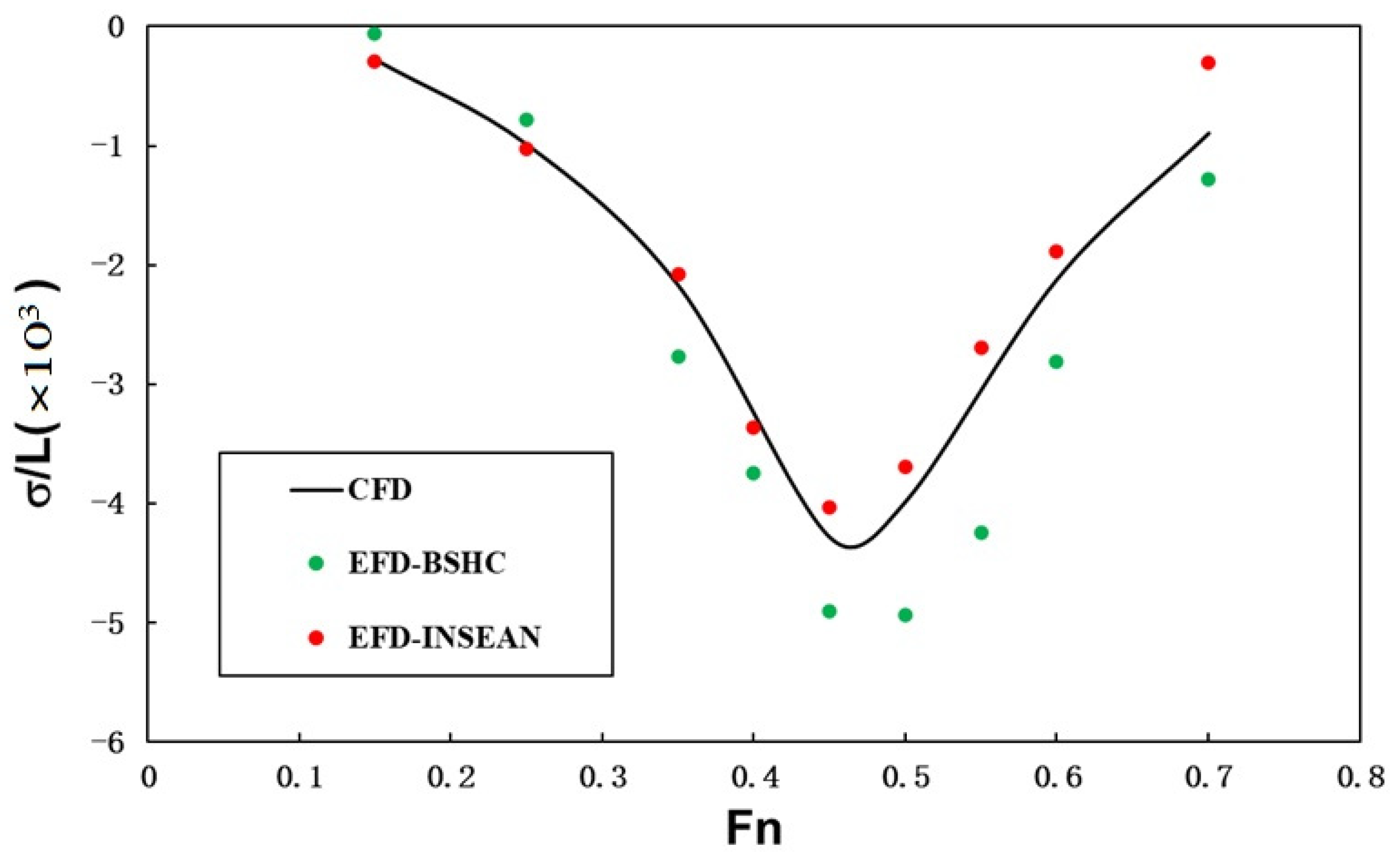
4.2. Numerical Results of Bare Hull
4.3. Numerical Results of Self-Propulsion Hull
5. Discussion about the Results
5.1. Analysis of the Wave around the Hull
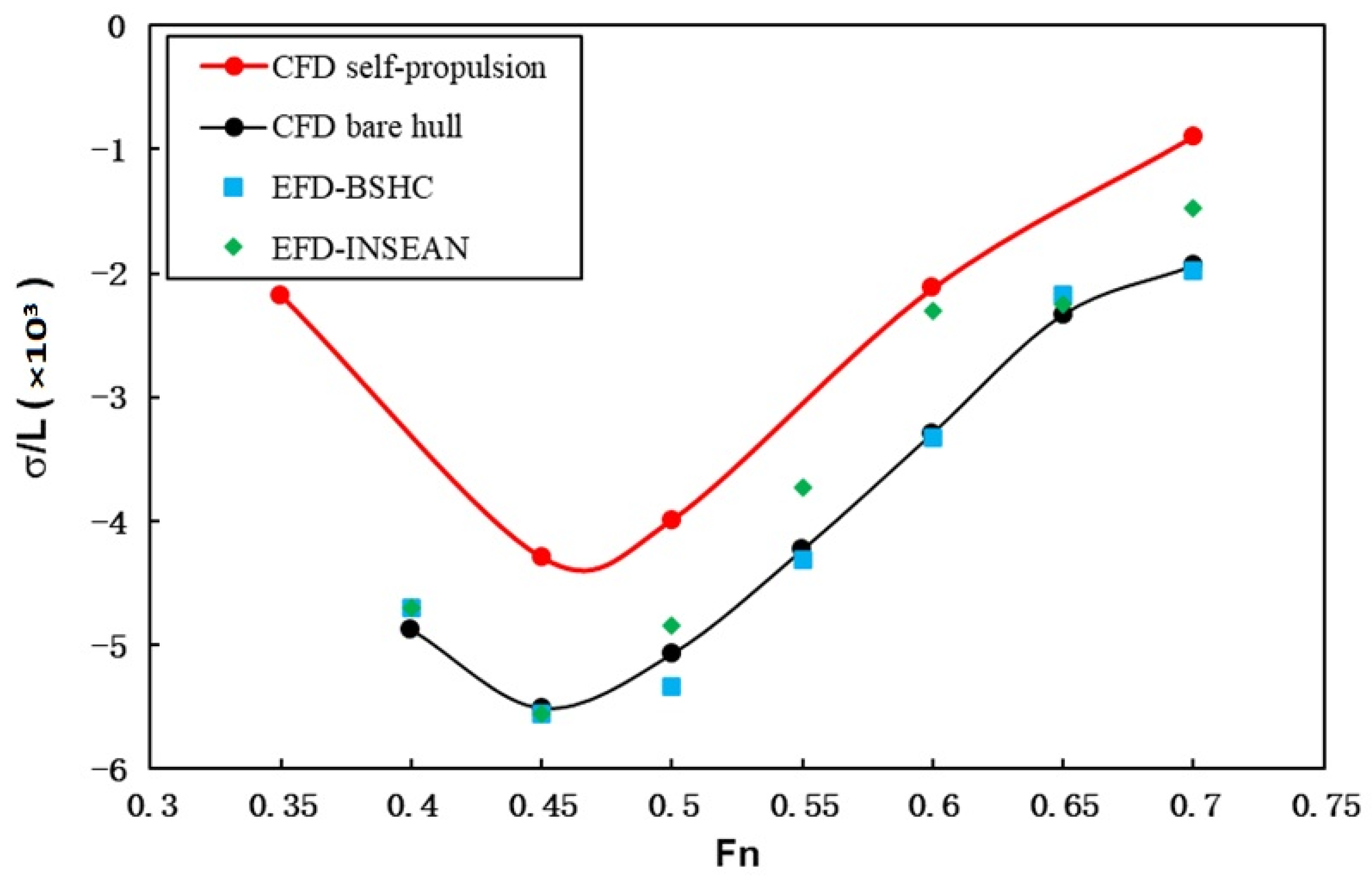
5.2. Analysis of the Hull Attitude
5.3. Analysis of the Self-Propulsion Efficiency
- 1.
- Thrust deduction
- 2.
- The free stream efficiency
- 3.
- The overall efficiency
6. Conclusions
- The numerical uncertainty of the resistance coefficient, sinkage, and trim are 3.24%, 4.79%, and 4.12%, respectively. The numerical uncertainty is small enough to perform further simulations for the catamaran. Moreover, the validations are performed by comparing the CFD results with the experimental data from INSEAN and BSHC. The good match represents the accuracy of the CFD solver and numerical method.
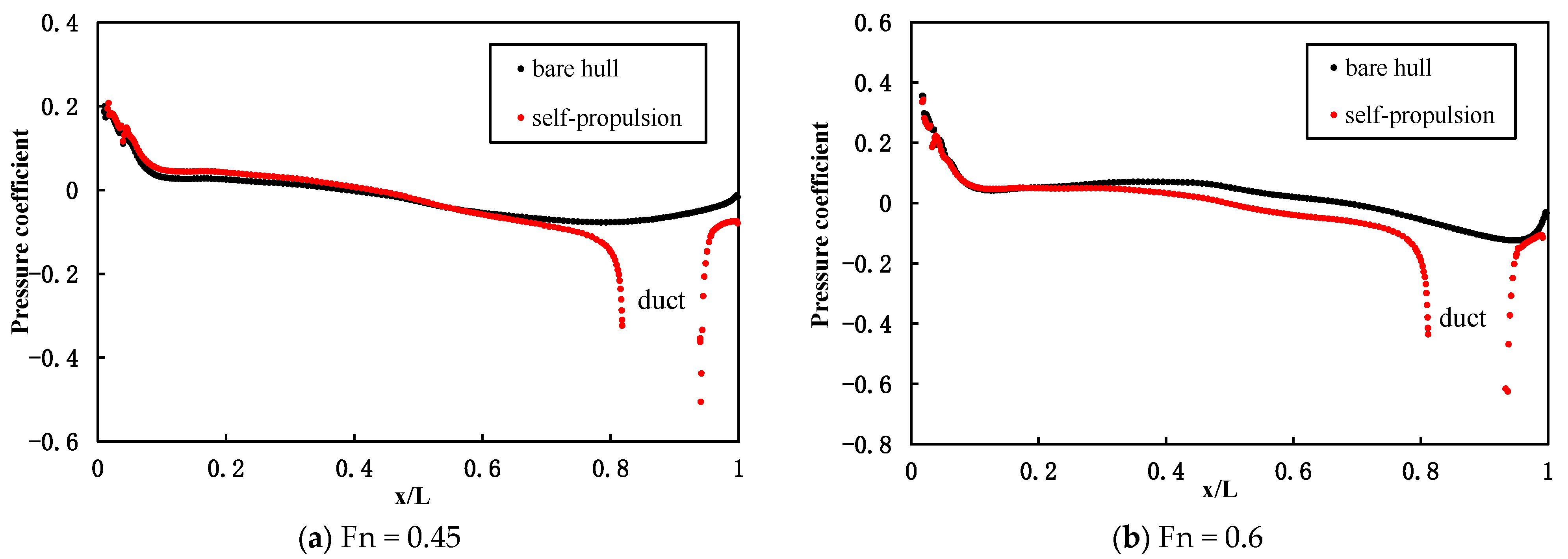
- There are two reasons for the greater trim and greater sinkage when the waterjet operated behind the catamaran: On the one hand, the water surface near the stern is lower with the operation of the waterjet, while the water surface near the bow does not change much. On the other hand, the flow near the waterjet is accelerated by the suction effect of the pump, which reduces the pressure distribution on the bottom of the hull near the stern. The two aspects have a great impact on the attitude of the hull.
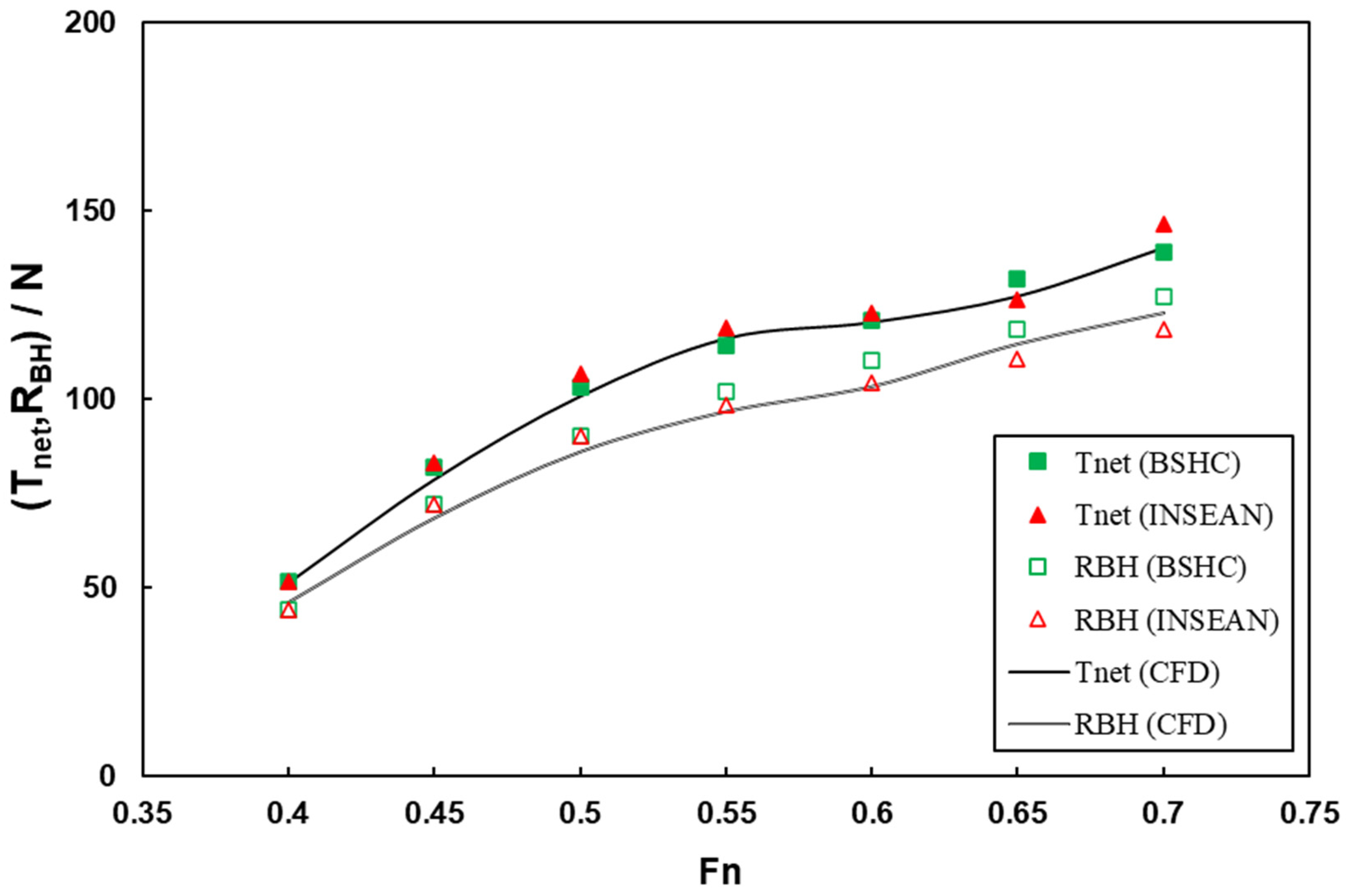
- Because of the larger wetted surface and the smaller wetted transom board, the thrust deduction is positive within the scope of the study, which means the waterjet system has a negative effect on the hull. Moreover, the interaction is also negative for the efficiency of the waterjet. As a result, the overall efficiency of the waterjet system behind the hull is about 0.75~0.8 times the free stream efficiency.
- Among the components of the overall efficiency (including ducting efficiency, ideal efficiency, pump efficiency, and interaction efficiency), the ducting efficiency is the highest and the pump efficiency is the lowest. Moreover, the ducting efficiency is higher than 0.9, which means the loss on the duct is relatively small. However, the pump efficiency is significantly lower than the other components. In addition, the interaction between the hull and waterjet system is also an important part, and a positive interaction is a desired goal.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fujisawa, N. Measurements of Basic Performances for Waterjet Propulsion Systems in Water Tunnel. Int. J. Rotating Mach. 1995, 2, 43–50. [Google Scholar] [CrossRef]
- Seo, J.; Jeong, H.-S.; Chang, K.; Park, J.; Rhee, S.H. Towing Tank Model Tests for Propulsive Performance Analysis of a Waterjet Propelled Amphibious Vehicle. In Proceedings of the Sixth International Symposium on Marine Propulsors, Rome, Italy, 26–30 May 2019. [Google Scholar]
- Seo, J.; Jeong, H.-S.; Rhee, S.H.; Chang, K. Towing tank model tests for propulsive performance analysis of a waterjet-propelled amphibious vehicle. J. Ship Res. 2020, 66, 91–107. [Google Scholar] [CrossRef]
- Gong, J.; Guo, C.-Y.; Wu, T.-C.; Zhao, D.-G. Particle image velocimetry measurement of velocity distribution at inlet duct of waterjet self-propelled ship model. J. Hydrodyn. 2017, 29, 879–893. [Google Scholar] [CrossRef]
- Huang, R.; Zhang, R.; Wang, Y.; Luo, X.; Zhu, L. Experimental and numerical investigations into flow features in an intake duct for the waterjet propulsion under mooring conditions. Acta Mech. Sin. 2021, 37, 826–843. [Google Scholar] [CrossRef]
- Song, K.; Guo, C.; Wang, C.; Gong, J.; Li, P. Investigation of the influence of an interceptor on the inlet velocity distribution of a waterjet-propelled ship using SPIV technology and RANS simulation. Ships Offshore Struct. 2020, 15, 138–152. [Google Scholar] [CrossRef]
- Cao, P.; Wang, Y.; Li, G.; Cui, Y.; Yin, G. Numerical Hydraulic Efficiency Analysis of Waterjet Propulsion; IET: Stevenage, UK, 2014. [Google Scholar]
- Gong, J.; Guo, C.; Wang, C.; Wu, T.; Song, K.W. Analysis of waterjet-hull interaction and its impact on the propulsion performance of a four-waterjet-propelled ship. Ocean Eng. 2019, 180, 211–222. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Z.; Dai, Y. Numerical study on self-propulsion of a waterjet propelled trimaran. Ocean Eng. 2020, 195, 106655. [Google Scholar] [CrossRef]
- Jiang, J.; Ding, J. The hull-waterjet interaction of a planning trimaran. Ocean Eng. 2021, 221, 108534. [Google Scholar] [CrossRef]
- Eslamdoost, A. Interaction of Waterjet/Hull Interaction Effects; Chalmers University of Technology: Gothenburg, Sweden, 2012. [Google Scholar]
- Eslamdoost, A. The Hydrodynamics of Waterjet/Hull Interaction; Chalmers University of Technology: Gothenburg, Sweden, 2014. [Google Scholar]
- Eslamdoost, A.; Larsson, L.; Bensow, R. A pressure jump method for modeling waterjet/hull interaction. Ocean Eng. 2014, 88, 120–130. [Google Scholar] [CrossRef]
- Gong, J.; Guo, C.; Zhang, H. Numerical Analysis of Impeller Flow Field of Waterjet Self-Propelled Ship Model. J. Shanghai Jiaotong Univ. 2017, 51, 326–331. [Google Scholar]
- Eslamdoost, A.; Vikström, M. A body-force model for waterjet pump simulation. Appl. Ocean Res. 2019, 90, 101832. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, J.; Shang, Y. Stern Flap-Waterjet-Hull Interactions and Mechanism: A Case of Waterjet-Propelled Trimaran with Stern Flap. J. Offshore Mech. Arct. Eng. Trans. ASME 2020, 142, 021203. [Google Scholar] [CrossRef]
- Feng, D.; Yu, J.; He, R.; Zhang, Z.; Wang, X. Free running computations of KCS with different propulsion models. Ocean Eng. 2020, 214, 107563. [Google Scholar] [CrossRef]
- Feng, D.; Yu, J.; He, R.; Zhang, Z.; Wang, X. Improved body force propulsion model for ship propeller simulation. Appl. Ocean Res. 2020, 104, 102328. [Google Scholar] [CrossRef]
- Liu, L.; Chen, M.; Yu, J.; Zhang, Z.; Wang, X. Full-scale simulation of self-propulsion for a free-running submarine. Phys. Fluids 2021, 33, 047103. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Sussman, M. A Level Set Approach for Computing Solutions to Incompressible Two-Phase Flow; University of California: Los Angeles, CA, USA, 1994. [Google Scholar]
- Zhang, Z.; Guo, L.; Wei, P.; Wang, X.; Feng, D. Numerical Simulation of Submarine Surfacing Motion in Regular Waves. Iran. J. Sci. Technol. Trans. Mech. Eng. 2018, 44, 359–372. [Google Scholar] [CrossRef]
- Carrica, P.M.; Castro, A.M.; Stern, F. Self-propulsion computations using a speed controller and a discretized propeller with dynamic overset grids. J. Mar. Sci. Technol. 2010, 15, 316–330. [Google Scholar] [CrossRef]
- Chiu, I.; Meakin, R. On Automating Domain Connectivity for Overset Grids. In OMI Report; NASA Ames Research Center Advanced Design Cycle Branch: Los Altos, CA, USA, 1995. [Google Scholar]
- Cho, K.W.; Kwon, J.H.; Lee, S. Development of a Fully Systemized Chimera Methodology for Steady/Unsteady Problems. J. Aircr. 1999, 36, 973–980. [Google Scholar] [CrossRef]
- Bonet, J.; Peraire, J. An alternating digital tree (ADT) algorithm for 3D geometric searching and intersection problems. Int. J. Numer. Methods Eng. 1991, 31, 1–17. [Google Scholar] [CrossRef]
- International Towing Tank Conference (ITTC). Practical Guidelines for Ship cfd Applications. In Proceedings of the 26th ITTC, Rio de Janeiro, Brazil, 28 August–3 September 2011. [Google Scholar]
- Stern, F.; Wilson, R.V.; Coleman, H.W.; Paterson, E.G. Comprehensive approach to verification and validation of CFD simulations-Part 1: Methodology and procedures. Trans. ASME. J. Fluid Eng. 2001, 123, 793–802. [Google Scholar] [CrossRef]
- Wilson, R.V.; Stern, F.; Coleman, H.W.; Paterson, E.G. Comprehensive approach to verification and validation of CFD simulations-Part 2: Application, for RANS simulation of a cargo/container ship. Trans. ASME. J. Fluid Eng. 2001, 123, 803–810. [Google Scholar] [CrossRef]
- International Towing Tank Conference (ITTC). Waterjet Propulsive Performance Prediction—Propulsion Tests and Extrapolation. In Proceedings of the 26th ITTC, Rio de Janeiro, Brazil, 28 August–3 September 2011. [Google Scholar]
- International Towing Tank Conference (ITTC). Waterjet Propulsive Performance Prediction—Waterjet Inlet Duct, Pump Loop and Waterjet System Tests and Extrapolation. In Proceedings of the 28th ITTC, Wuxi, China, 17–23 September 2017. [Google Scholar]
- International Towing Tank Conference (ITTC). The Specialist Committee on Validation of Waterjet Test Procedures. In Proceedings of the Specialist Committee on Validation of Waterjet Test Procedures Final Report and Recommendations to the 23rd ITTC, Venice, Italy, 8–14 September 2002. [Google Scholar]
- International Towing Tank Conference (ITTC). The Specialist Committee on Validation of Waterjet Test Procedures. In Proceedings of the Specialist Committee on Validation of Waterjet Test Procedures Final Report and Recommendations to the 24th ITTC, Edinburgh, UK, 4–10 September 2005. [Google Scholar]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameter | Symbol | Value |
|---|---|---|
| Length between perpendiculars | LPP/m | 3.627 |
| Waterline length | LWL/m | 3.627 |
| Molded breadth | B/m | 1.157 |
| Breadth of demihull | b/m | 0.2904 |
| Demihull spacing | s/m | 0.8470 |
| Bow draft | TF/m | 0.1815 |
| Stern draft | TA/m | 0.1815 |
| Volume of displacement | Δ/m3 | 0.07700 |
| Longitudinal center of gravity | LCG/m | 1.911 |
| Vertical center of gravity | KG/LPP | 0.02715 |
| Parameter of the Waterjet | Value |
|---|---|
| Diameter of the rotor (DR)/m | 0.120 |
| Blades number of the rotor | 3 |
| Blades number of the stator | 8 |
| Tip clearance between rotor and duct/mm | 0.917 |
| Diameter of the nozzle/m | 0.0610 |
| Length of the duct/m | 0.800 |
| 2.14 | 2.41 | 3.24 | ||
| Sinkage | 4.45 | 1.77 | 4.79 | |
| Trim | 3.68 | 1.85 | 4.12 |
| Parts | Number of Nodes in Three Directions | Grids Number (Million) |
|---|---|---|
| Background | 80 × 46 × 213 | 0.784 |
| Demihull | 59 × 189 × 66 | 0.736 |
| 137 × 179 × 66 | 1.619 | |
| Total | 3.140 |
| Part | Number of Nodes in Three Directions | Grids Number (Million) |
|---|---|---|
| Background | 80 × 46 × 213 | 0.784 |
| Demihull | 59 × 189 × 66 | 0.736 |
| 137 × 179 × 66 | 1.619 | |
| Nozzle | 45 × 45 × 41 | 0.083 |
| 177 × 80 × 41 | 0.581 | |
| 177 × 13 × 41 | 0.094 | |
| Duct | 128 × 61 × 61 | 0.476 |
| 128 × 241 × 28 | 0.864 | |
| Shaft | 46 × 46 × 32 | 0.068 |
| 46 × 46 × 32 | 0.068 | |
| 111 × 181 × 32 | 0.643 | |
| 70 × 151 × 33 | 0.349 | |
| 39 × 38 × 33 | 0.049 | |
| 39 × 38 × 33 | 0.049 | |
| Stator | 8 × (119 × 71 × 31) | 8 × 0.262 |
| Total | 8.560 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, Y.; Feng, D.; Deng, W.; Yang, J.; Zhang, H. Numerical Study on the Waterjet–Hull Interaction of a Free-Running Catamaran. J. Mar. Sci. Eng. 2023, 11, 864. https://doi.org/10.3390/jmse11040864
Zou Y, Feng D, Deng W, Yang J, Zhang H. Numerical Study on the Waterjet–Hull Interaction of a Free-Running Catamaran. Journal of Marine Science and Engineering. 2023; 11(4):864. https://doi.org/10.3390/jmse11040864
Chicago/Turabian StyleZou, Yanlin, Dakui Feng, Weihua Deng, Jun Yang, and Hang Zhang. 2023. "Numerical Study on the Waterjet–Hull Interaction of a Free-Running Catamaran" Journal of Marine Science and Engineering 11, no. 4: 864. https://doi.org/10.3390/jmse11040864