1. Introduction
Climate change and environmental degradation are existential threats facing the world. Maritime transport represents 93% of global trade volume, which highlighted the demand for low-carbon and green transport. This involves increasing innovation and development with a focus on the autonomy of aerial, ground, and underwater vehicles. This wave comes from a resurging significant interest in uncrewed surface vehicles (USVs) and their intelligent motion control navigation is in full swing [
1,
2,
3,
4]. In 2019, collision was considered the second factor that causes navigation accidents as reported in the annual overview of maritime casualties and incidents by the European Maritime Safety Agency. The COLREGs were created to prevent and avoid collisions between ships, and present requirements, which should be complied with by all vessels, in order to build modules that identify encounter situations, determine the action manner, and assess the collision risk, etc. [
5]. Transforming these rules into quantitative constraints to improve the practicality of traffic in the sea environment and optimize results is needed.
Path planning is one of the fundamental aspects of autonomous systems and is carried out on two levels: local path planning and global path planning based on sensor information and environmental data information, respectively. Obstacle detection and avoidance (ODA) through an environment including static barriers and moving target ships is a multi-optimization nonlinear problem, which must consider several aspects, including optimal path, computational time, maritime traffic laws, and integrity, safety, and COLREG rules. Information is crucial in the design of the planning algorithm; in addition, the planning process must be followed by the correct execution and not only focused on completing the tasks within a specific time.
Motivated by the above observations, this work compares several path planning artificial intelligence techniques, such as a data driven models, to resolve a multi-optimization nonlinear problem. Hence, there is no need for theoretical demonstration, since they are empirical models, which extract information from the historical data of the missions carried out under supervision. This paper compares existing methods, but it is important to remark that the novelty is how they are structured within the general planning scheme. The main purpose of this study is to show the capacity of each model and to conclude the goodness of each one, effectively solving the problem in question without having to solve complex equations. Although it is possible to solve the problem by solving the equations, it is important to point out that different drawbacks could appear as certain handicaps, such as local minimums, convergence problems, or a huge computation time. Approach based on driven-data learning can overcome the most significant difficulties that can face USVs. The challenge consists of training models, based on data, that can meet the requirements of the COLREGs, avoiding accidents. Furthermore, it should be remarked that the available energy load and environmental conditions are considered in the proposed solution.
The remainder of this paper is organized as follows: An overview of existing methods of collision avoidance path planning in USVs is provided in
Section 2. In
Section 3 are descriptions of some AI techniques used in the proposed method in this paper. Then,
Section 4 presents a detailed description of the methodology used in the current study.
Section 5 contains experimental simulations to illustrate the feasibility and effectiveness of the proposed scheme. Finally,
Section 6 presents conclusions and ideas about future work.
2. Related Work
In the past decades, there was rapid growth in developing USV technology in several fields for various applications and many different types of navigation missions. During USV missions, ODA algorithms need to react quickly to obstacles in the environment and return to the desired trajectory. The important processes of ODA are obstacle detection, decision making, and avoidance operation. These processes should be executed considering several aspects, such as economy, safety, environmental behaviors, and COLREGs constraints. There are many ways to characterize categories of algorithms applied to the ODA. Many researchers made them more efficient, although there are many reviews on this topic. In the early stages, the ODA requirements should be precisely defined with a feasible solution, as in the case when the vehicle navigates in a beforehand-known mapped environment with static barriers; that is, global path planning, which can be carried out by solving a linear problem via heuristic search algorithms or by classical graph search theory. Tam et al. [
6] categorized the methods used in path planning into the heuristic approach and deterministic approach, and Zhang et al. [
7], in their work, distinguished between four categories: traditional algorithms, soft computing algorithms, intelligent learning algorithms, and spline curves.
The visibility graphs and grid-based path planning were proposed first in the form of the Dijkstra algorithm [
8], Hart et al. [
9] developed A*, a faster alternative to the Dijkstra algorithm. In real-time conditions, these methods are, in general, not effective. Other algorithms are described based on the same principle of optimization. Stentz [
10] introduced the D* algorithm, which is a combination of the algorithms of Dijkstra and A*. This algorithm has the advantage of being more robust to uncertainties related to the position of obstacles. Recently, the A* algorithm was implemented and improved by different works, such as those by Chen et al. [
11], Singh et al. [
12], and Campbell et al. [
13]. In Souissi et al. [
14], the authors distinguish four categories of the A* variants: dynamic variants, any-angle movement, moving target points, and anytime path planning.
Path re-planning is proposed to cover real-time planning needs or avoidance under dynamic environments. The artificial neural networks approach was the subject of numerous articles [
15,
16,
17]. Additionally, many current works used deep learning reinforcement to generate trajectories [
18,
19]. The probabilistic methods, such as particle swarm optimization [
20], ant colony [
21], probabilistic road mapping [
22], the rolling windows method [
23], velocity obstacle [
24], local reactive obstacle avoidance [
25], optimal reciprocal collision avoidance [
26], dynamical virtual ship [
27], finite control set model [
28], evolutionary approach [
29], and so on. Vagale et al. [
30] review the development of collision avoidance and path planning for ASVs. The article presents a good and comprehensive historical background on the subject, and provides a comparative study of algorithms, giving their advantages and limitations.
Moreover, the main effort focused on using a deterministic search algorithm, such as the grid-based methods, which search iteratively around the whole map, but sometimes, the computing time increases exponentially.. Xia et al. [
31] developed an algorithm based on the velocity obstacle (VO) method and modified quantum particle swarm optimization for USV collision avoidance.
As a deterministic search algorithm, Warren [
32] devised an enhanced version of the artificial potential fields method (APF), consisting of an expanded APF for multi-obstacles. Song et al. [
33] designed a new predictive artificial potential field using time information and predictive potential to plan a smoother path.
The use of support vector machines (SVMs) for path planning applications is proposed by Miura [
34] for environments with known barriers. Sarkar [
35] discussed the use of SVMs as path planning algorithms to help robots with navigation through known and unknown environments. Additional applications were presented in [
36,
37].
On the other hand, the motion control scheme implemented in the USVs is affected by ocean disturbances. The most disturbing ocean disturbances for navigation are winds, waves, and currents. In general, the effects of this disturbance affect the performance of USVs that must follow a predefined trajectory. This is because, in most cases, the vehicle does not move in the same direction as the current, and this will move the vehicle away from the predefined path. Surface ships are constantly affected by the wind, which must be counteracted. Moreover, the waves have a noticeable and direct effect on the course controller of the USVs. If the waves are not considered, there can be discrepancies between the simulated response and the actual one.
Vegal et al. [
38] presented a comparative analysis of path planning and collision avoidance algorithms for USV outline advantages and limitations of numerous algorithms. Furthermore, it is pointed out in the paper that many created algorithms seem to be effective, but they need to be tested in a real environment or with real traffic data. In this work, a machine learning model was trained using real data and tested in simulations similar to real data.
3. Preliminar and Methods Overview
3.1. Main Forces for an USV
According to [
39] the main forces that govern a USVs movement are:
Hydrodynamic forces (): added mass (virtual mass added to the ship by the mass of water moved with the ship), potential damping, and viscous damping;
Wave forces ();
Hydrostatic forces ( restoring forces (buoyancy));
Wind forces ();
Control and propulsion forces (τ): foil dynamics (sail, keel, and rudder) and thrusters.
The resultant USV movement is given by a combined effect of those forces and moments, as shown in Equation (8):
The USV dynamic model is under-actuated and suitable for small marine vehicles as the industry standard USV scale. In this paper, the dynamics and delays of USV actuators are neglected.
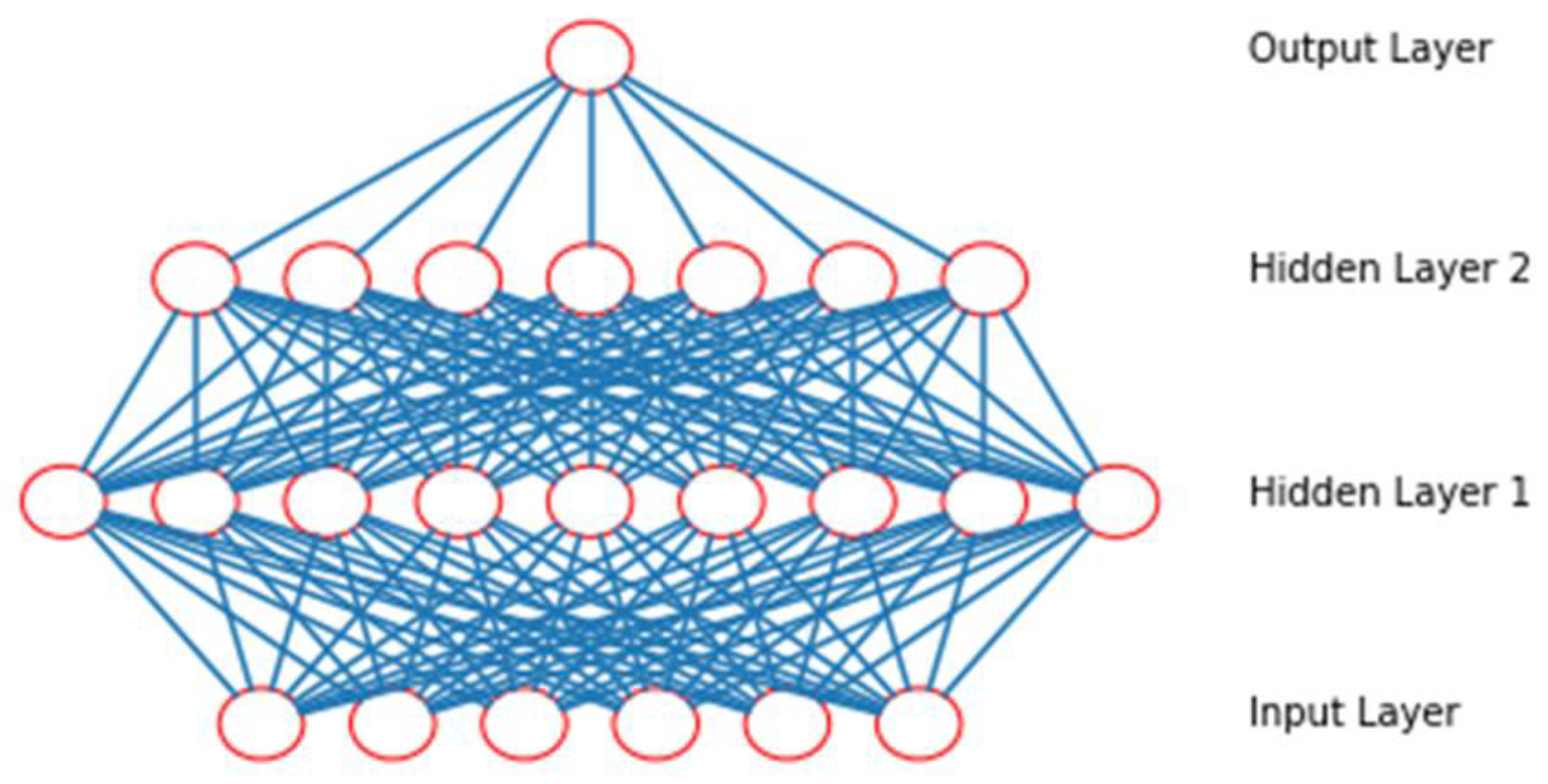
3.2. Artificial Neural Networks (ANN)
In recent decades, the use of artificial intelligence grew exponentially in various fields of research. According to Haykin [
40], the work on ANN was motivated from inception by the recognition that the human brain computes in an entirely different manner than the conventional digital computer. The power of neural networks is the ability to learn from the environment, to improve performance through learning (as the process that enables to parameters of a neural network are adapted through a simulation process), and the ability to model complex functional relationships by predefining the behaviour and the interactions of variables. The tangent hyperbolic is used for all neurons and is defined by:
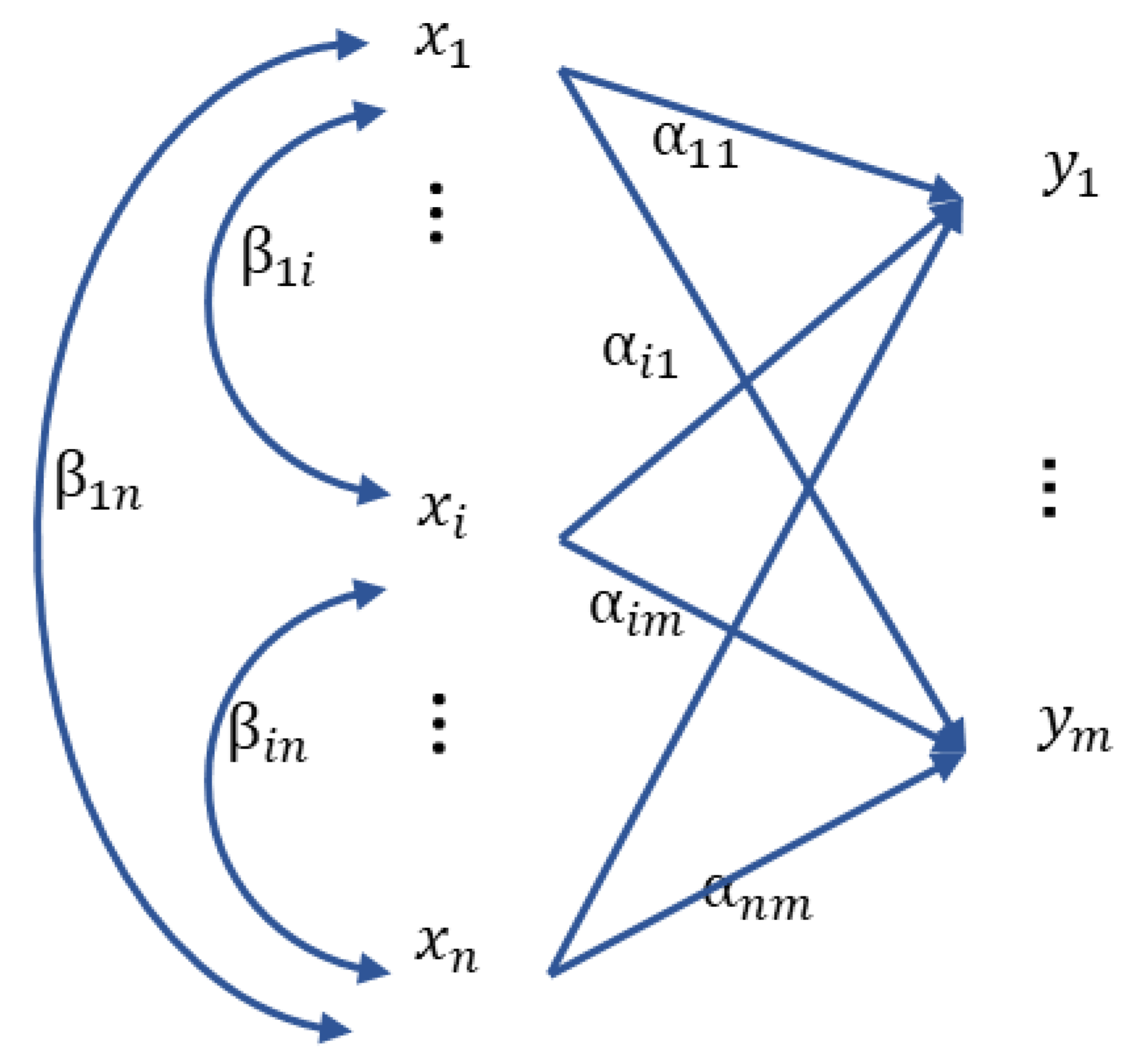
Considering a feedforward neural network, with m outputs, n inputs, and l hidden neurons:
are the inputs;
are the outputs;
are the weights connecting first (inputs neurons) with second (hidden neurons) and with the third layer (outputs neurons), respectively, and;
, are the activation functions.
The input of hidden neurons is calculated as:
With an output of:
, given by:
Figure 1 shows the universal architecture of the ANN.
The next approach consists of using the ANN that is trained using the data obtained from the first approach. The data are selected when the mission is carried out successfully.
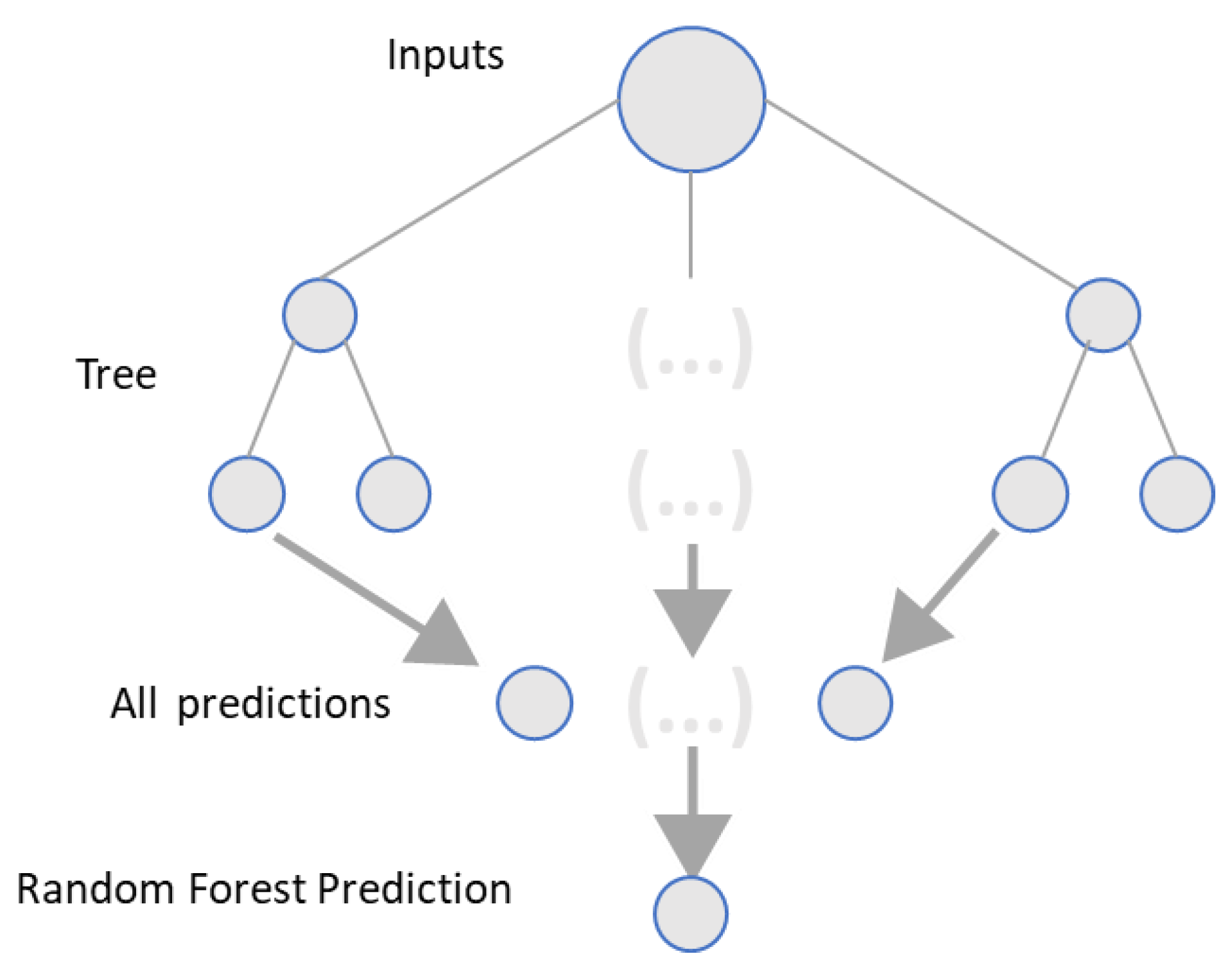
3.3. Random Forest Regressor (RFR)
The algorithm is a rival to boosting and an extension of bagging. Random forest [
41] operates by constructing a multitude of decision trees at training time. It makes use of both categorical making classes or continuous making regression (see
Figure 2).
The methodology uses binary recursive partitioning to grow an ensemble of regression trees, with each tree node’s predictor space being split into binary pieces based on a subset of predictors randomly selected. The answer data were divided into two descendant nodes at each binary split to optimize homogeneity and select the best binary split.
A random forest is made up of various tree predictors . Where is a vector of the observed inputs . and are independent and identically distributed random vectors. is the output observed.
The random forest prediction for regression is the collection’s unweighted average error:
The goal is to estimate the regression function that is consistent if as .
3.4. Multi-Output Support Vector Regression (MSVR)
Support vector machines (SVMs) were exceptionally developed to clear up the statistics classification problem [
42]. SVMs were also successfully applied over the past few years in vision, human–robot interaction, pattern matching-based tracking, and robot path planning and navigation
SVMs project the input onto a new hyperspace using kernel functions so that complex non-linear patterns can be easily represented. SVM can generate non-linear separating hyperspace, which is appropriate for producing smooth paths with a relatively low cost.
Giving the training data
, the goal is to find a function
that has at most
ε deviation from the target
:
So, the problem can be a convex optimization problem by minimizing
subject to:
3.5. Multiple Logistic Regressor (MLR)
Multiple logistic regression [
43] is an extension of the simple logistic regression model, in which a binary response is predicted based on multiple predictors, which can be both continuous and categorical (see
Figure 3). The equation with which we can obtain the predictions in this case is:
where
.
4. Proposed Approach
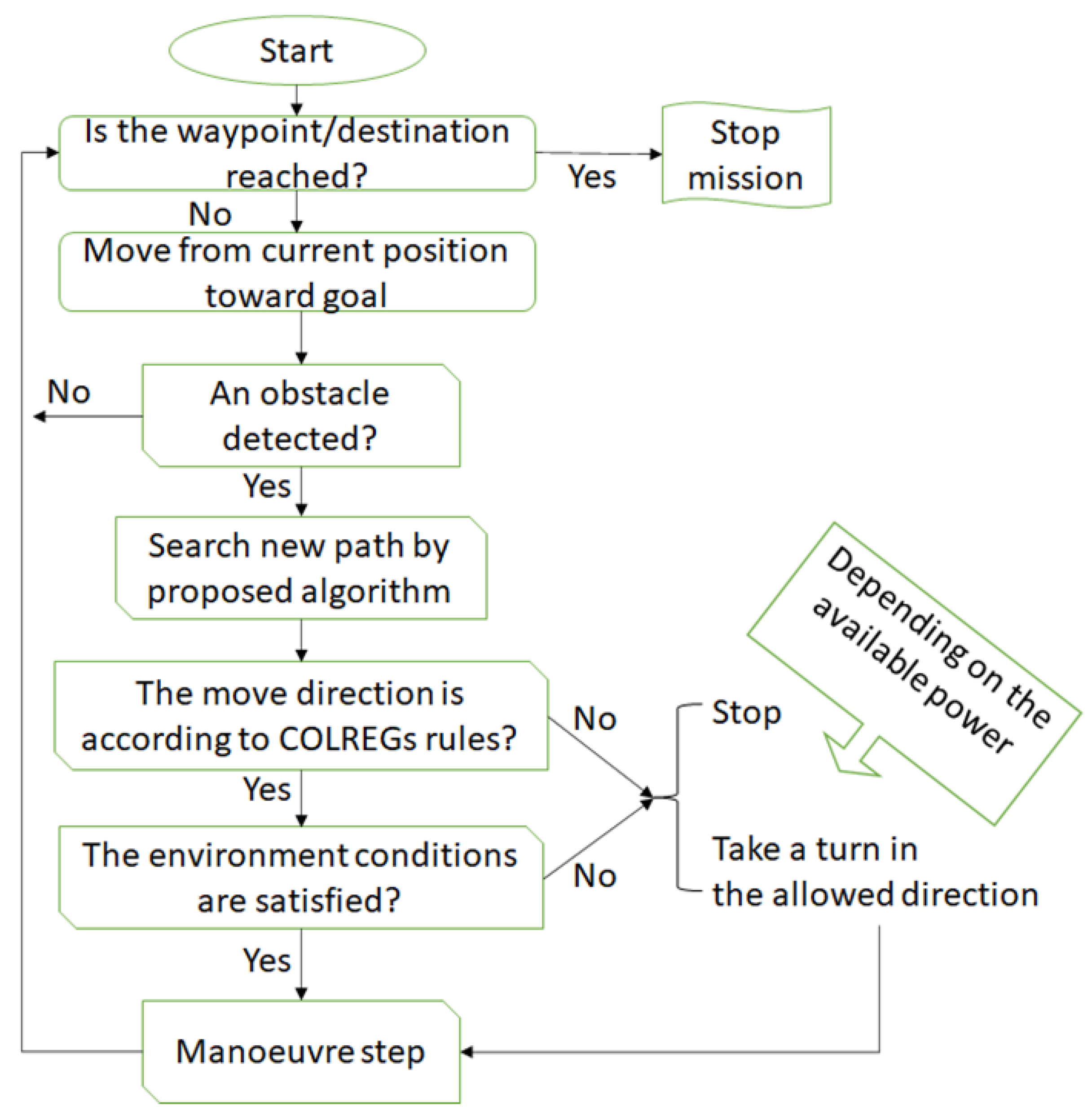
The purpose here is to present an algorithm able to generate solutions in real time and able to achieve a high level of autonomy and complying with COLREG’s rules.
The schematic of the proposed path planning system used in this article is shown in
Figure 4. The fundamental idea is to reach the destination waypoint. The distance between the USV and the goal, and the distance between obstacles as they cross the collision zone, are always calculated during the mission.
Firstly, we calculate the global path, from the destination to the goal, with the ML method selected. Then, when an obstacle is detected in the collision zone, algorithm 1 is applied to explore an alternative waypoint to avoid the obstacle. As a result, a new path to the goal is created. After that, it is checked if the COLREG rules are satisfied and the main forces of the USV can allow the vehicle to carry out the new maneuver and reach the new waypoint. The constraints of the COLREGs rules on the obstacle avoidance behavior of USVs give clear instructions on how a ship should behave when it encounters another ship. Role 14, 15, 16, and 18 of COLREGs explain the four most encountered scenarios (head-on, over-take, cross-right, and cross-left), which are taken in count in our algorithm.
Then, depending on the maneuver’s feasibility (available power and environmental conditions), the USV either continues or performs an emergency stop, at which point an alarm is activated and an alternative solution is searched again with the available predictions. The calculations and the mission are completed when the destination is reached.
The proposed algorithm pointed out in the previous
Figure 4 is previously explained in
Section 3 in order to learn from the historical data. These data are previously processed and normalized. There are different methods to scale the data; although these transformations of the inputs are not strictly necessary, they are carried out for practical reasons since learning is faster, the probability of reaching a local minimum decreases, and fewer iterations are required during the training of the model.
5. Results and Discussion
This section implements, discusses, and verifies the validity of a collision avoidance system designed by our approach in different cases studies. The resultant USV movement is evaluated in different environments; considering fixed and moving obstacles, critical environment conditions (as: eddy) are considered mobile obstacles, and the simulations considered COLREG compliance.
During implementation, our first step is to develop a region in which obstacles are placed to check the performance of the proposed model. The calculations of this work were carried out in the Win10 × 64 operating system (Intel (R) Core (TM) i5-4200U CPU 5, RAM 8 GB. The algorithm was implemented in Python with the Scientific Python Development Environment (Spyder IDE 5.4.1).
5.1. Description of Data Used for Train and Testing the Methods
A Wave Glider SV2 (Liquid Robotics, Herndon, VA, USA), an ocean wave-propelled USV with a two-module design, was used to gather the ocean data set used in this work (
Figure 5). A lower module, named the sub, is connected to the surface module (the float) by an electro-mechanical umbilical of 4 m in length. Six fins, as part of the sub, moves with a degree of freedom, allowing the alignment with the forward component of the underlying orbital motion of the waves in the ocean surface, transforming the elliptical oscillation at fin depth into a horizontal force to propel forward the float module, independently of wave direction. The sub module has a rudder electronically controlled that allows maneuverability to the platform’s yaw axis when navigating through a waypoints list defined by the operator.
The float module has two solar panels located on top that provide a renewable source of power to onboard navigation and telemetry systems, as well as the rest of any onboard monitoring sensors and instrumentation. Beneath the solar panels, there are waterproof payloads as housings for the data acquisition systems and supporting electronics for sensor packages installed both below and above ocean surface on the float, as well as along the umbilical, onto the sub, or as part of a tow body module below or behind the vehicle either along the ocean surface at a given depth.
The wave glider’s control and navigation is managed through iridium satellite bi-directional link from user shore stations. Navigation waypoints and all system commands can be sent to the USV through the web-based graphical user interface wave glider monitoring system (WGMS). Telemetry packets containing exhaustive platform information and sub-sampled payload sensor data are sent back to shore for real-time monitoring during conducted missions using the same iridium link.
The data considered in this work consist of data collected in several short missions within the Canary Islands (Spain), and other longer missions, such as the mission carried out between the island of Faial (Portugal) and the island of Gran Canaria (Spain), this mission lasted 54 days between November 2019 and January 2020. These real operating scenarios, with a total of 213 days in their entirety (the period January 2019–July 2022), provided the set of navigation and environmental data. The cases extracted that represent collision avoidance situations were selected within this historical register. Each sample and data selected for the study refers to an encounter situation.
These cases serve as training test validation data, where the initial location, direction, and speed of the USV are set as appropriate in each situation. As the set of navigation and environmental data are not uniform, the dimensions of the simulation area are established in the two-dimensional plane. Note that the real map is divided in windows of dimension (2500 m × 2500 m). However, only a subset of these windows was considered. That is, the risking of collision scenarios was taking into account for the application of the proposed approach. For the sake of simplicity, these two-dimensional planes are represented as rectangles areas, being the coordinate (0, 0) the origin and the coordinate (50, 50) the destination. The safety radius was established as 50 m, and it is assumed that the speed of the USV and the moving obstacles are constant.
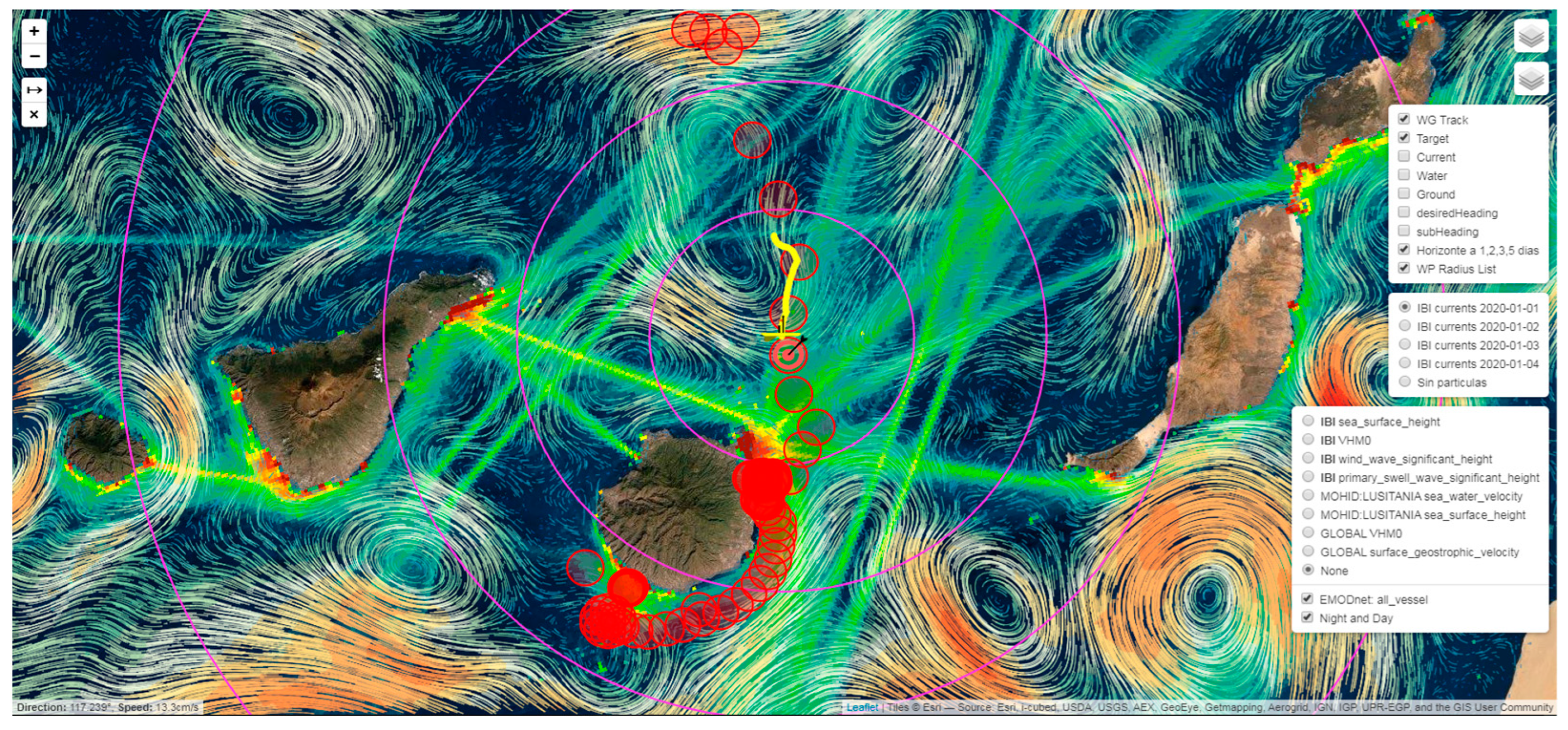
Additional tool layers based on AIS traffic navigation, ocean currents, ocean waves, etc., were added as data source to develop specific aids to navigation tools aiming to increase navigation safety (see
Figure 6).
5.2. Simulation Verification
After careful analysis of the recording data sets described in the previous section, specific situations were selected; for example, when the USV encountered fixed obstacles and when it had to modify its route to avoid colliding with ships and avoid eddies.
In the proposed algorithm, shown in
Table 1, four models are used: MLR, RFR, ANN, and MSVR. A total number of 2000 samples are the cases selected from the dataset. The data, once normalized, are divided into three groups. The first group is for training, and usually contains 60% of the data, and is used for fitting the model parameters. Additionally, 20% of the data will be used for network validation during training. To avoid overfitting, after every 50 iterations we check the accuracy result on the validation data set. Finally, once the training is finished, the error is calculated on the 20% of the remaining data (test data), to verify the goodness of the model. This process applies to all: ANN, MSVR, and RFR models. The model with the highest accuracy in the verification set is saved as the chosen model after training and testing.
5.3. Metrics to Evaluate the Goodness
The standard metrics scores used to evaluate the performance and the goodness of the prediction of each method: root mean square error “RMSE”, mean absolute percentage error “MAPE”, explained variance “EV”, coefficient of determination , and maximum residual error “Max Error”.
The definitions of these metrics are:
5.4. Results
The metrics score is computed for the comprehensive evaluation index.
Table 1 presents the results of the four methods.
In
Table 1, it is identified that is essential to employ various metrics for the evaluation of the performance of our predictions. We can see that the explained variance and the R
2 in this study do not give a good understanding of the goodness of the models. However, the combination of the scores given by RMSE and the max error metric shows the ANN as the best model, followed by the RFR, MSVR, and MLR model, in this order.
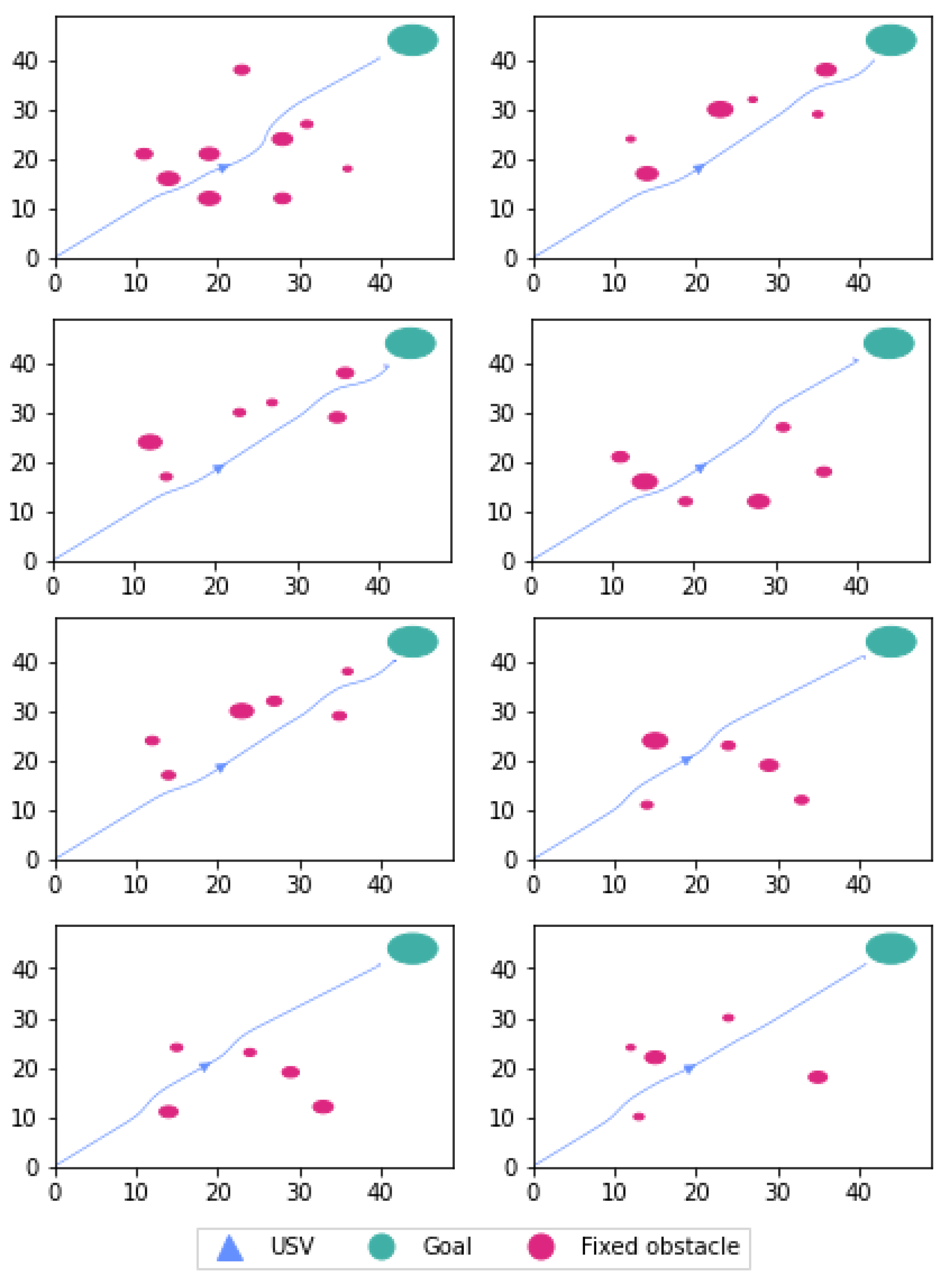
We show results of two scenarios considered in this paper. The first environment of USV navigation employing the proposed algorithm with the ANN model as a path planning algorithm. In this proposed environment, the USV goes from starting point (0, 0) to goal (40, 40) where many fixed obstacles in the environment are chosen arbitrarily with an arbitrary radius (see
Figure 7).
Figure 7 shows six different scenarios, and shows how the USV can reach the goal without colliding with the fixed obstacles. Note that in this case, the COLREG rules are not applied, given only fixed obstacles are considered.
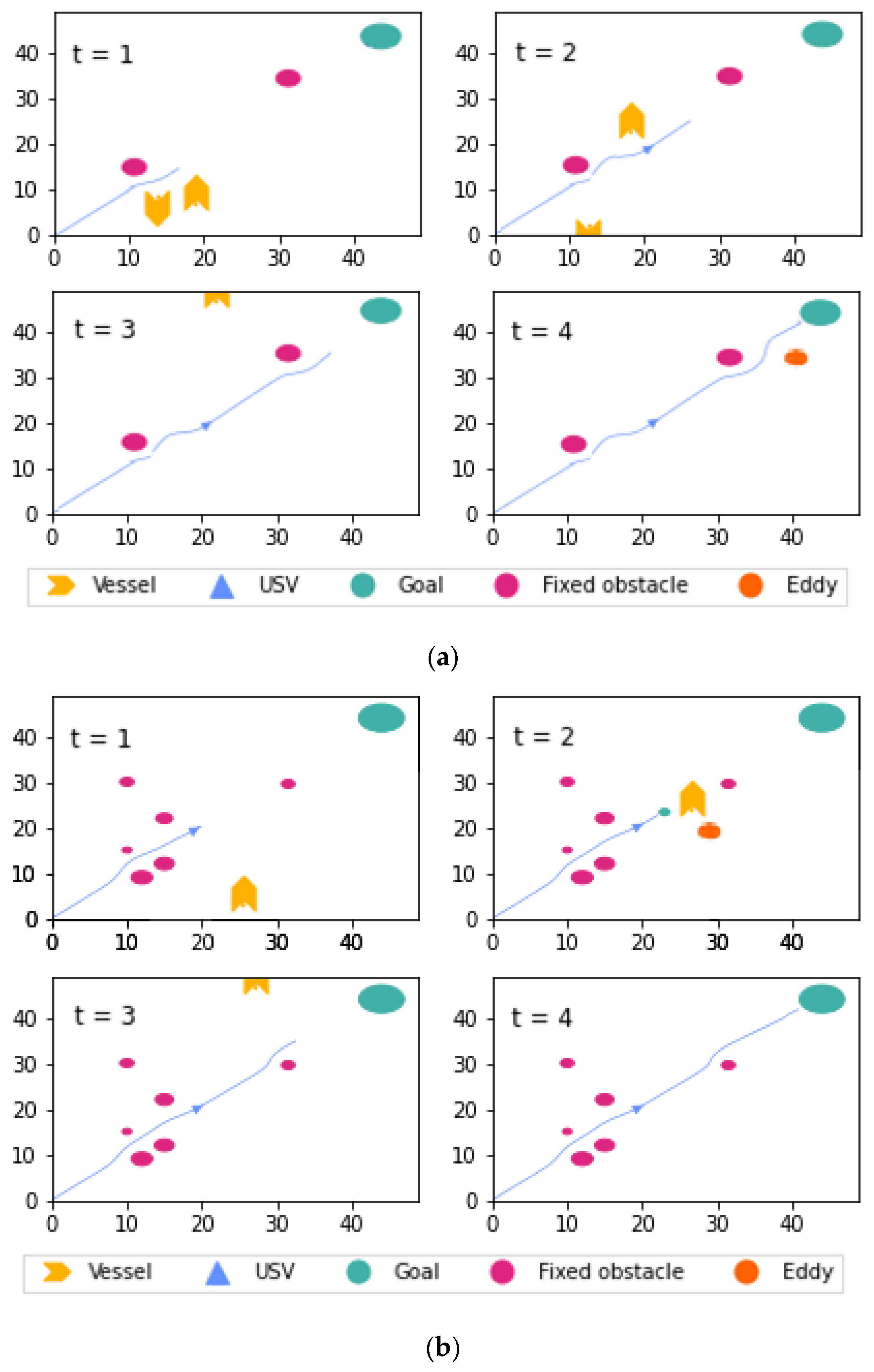
On the other hand, a second scenario combining fixed and moving obstacles (with different velocities) was also considered. In
Figure 8a,b, two ships with different speeds as mobile obstacles, two fix obstacles, and one eddy structure can be seen.
Figure 8a,b, illustrates how the USV arrives at its destination while avoiding fixed and moving obstacles and complying with COLREG rules. In
Figure 8a, at time t = 1, the USV avoids the first fixed obstacle; at time t = 2, the USV encounters a ship in a cross-right situation that it must avoid. At t = 3, another fixed obstacle appears, and at t = 4, an eddy must be avoided before reaching the destination with success.
In
Figure 8b, at time t = 1, the USV avoids fixed obstacles. Then at time t = 2, the USV make a stop emergency. Which is correct, because avoiding the vessel according to the COLREG, the USV has to deal with an addy, and strong current can change the trajectory of the USV.
However, in
Figure 8a,b, the USV does comply with the COLREG rules since some obstacles are dynamic. Therefore, we can see the effectiveness of the algorithm in finding trajectories with the least computational load, complying with the COLREG rules and reaching the objective safely. As a result, real-time implementation of such an algorithm is feasible in a maritime setting.
6. Conclusions
In this paper, an application anti-collision path planning algorithm for unmanned surface vehicles is presented. It is important to remark that the algorithms consider the available energy. The simulation results demonstrate that even in difficult and challenging complicated encounter operational scenarios, the proposed path planning algorithm may safely and correctly avoid the collision in compliance with COLREG rules. However, the head-on and cross-right situations were considered in these models, but the overtake scenario was not considered because the USV’s reduced navigation speed capabilities do not go faster than compared to ships.
The model is appropriate when we dispose of high-quality real-time data. However, this is not always the case. Therefore, a future line of research investigation should focus on adding additional navigation and detection sensing capabilities that include optical sensors (cameras) for image recognition. In this way, more valuable information is added to the inputs, making more robust and accurate predictions. Particularly when finding mobile obstacles, which do not transmit their position signals, or in other more complex situations, such as when the boat abruptly changes its target in an emergency case or any other unexpected reason. Employing these techniques, many constraints in navigations could be solved, ensuring security and saving energy.
Author Contributions
Conceptualization, C.B., M.M., F.C. and G.N.M.; methodology, C.B., M.M. and G.N.M.; software, M.M.; validation, C.B., M.M. and F.C.; formal analysis, C.B., M.M., F.C. and G.N.M.; investigation, C.B., M.M., F.C. and G.N.M.; resources, C.B. and F.C.; writing—original draft preparation, C.B., M.M., F.C., O.L. and G.N.M.; writing—review and editing, C.B., M.M., F.C. and G.N.M.; visualization, M.M.; supervision, O.L. and G.N.M.; project administration, C.B. and F.C.; funding acquisition, C.B. and F.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported with funding from the European Union’s Interreg Atlantic Area programme of the project iFADO: Innovation in the Framework of the Atlantic Deep Ocean (grant agreement EAPA_165/2016).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Acknowledgments
The authors acknowledge Interreg Atlantic program for funding the iFADO project, that enabled to gather in situ ocean data undertaking USV missions in the area of interest. Additionally, a special acknowledgement to all contributors in support marine operations.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Roberts, G.N.; Sutton, R. Advances in Unmanned Marine Vehicles; The Institution of Engineering and Technology: London, UK, 2006. [Google Scholar]
- Bertram, V. Unmanned surface vehicles—A survey. In Proceedings of the Skibsteknisk Selskab, Copenhagen, Denmark, 15 March 2008; Volume 1, pp. 1–14. [Google Scholar]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Barrera, C.; Padrón Armas, I.; Luis, F.; Llinas, O.; Marichal, N. Trends and Challenges in Unmanned Surface Vehicles (USV): From Survey to Shipping. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 135–142. [Google Scholar] [CrossRef]
- Karlis, T. Maritime Law Issues Related to the Operation of Unmanned Autonomous Cargo Ships. WMU J. Marit. Aff. 2018, 17, 119–128. [Google Scholar] [CrossRef]
- Tam, C.; Bucknali, R.; Greig, A. Review of collision avoidance and path planning methods for ships in close range encounters. J. Navig. 2009, 62, 455–476. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Chui, K.T.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially-known environments. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994. [Google Scholar]
- Chen, Z.; Zhang, Y.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. A Hybrid Path Planning Algorithm for Unmanned Surface Vehicles in Complex Environment with Dynamic Obstacles. IEEE Access 2019, 7, 126439–126449. [Google Scholar] [CrossRef]
- Singh, Y.; Bibuli, M.; Zereik, E.; Sharma, S.; Khan, A.; Sutton, R. A Novel Double Layered Hybrid Multi-Robot Framework for Guidance and Navigation of Unmanned Surface Vehicles in a Practical Maritime Environment. J. Mar. Sci. Eng. 2020, 8, 624. [Google Scholar] [CrossRef]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef] [Green Version]
- Souissi, O.; Benatitallah, R.; Duvivier, D.; Artiba, A.; Belanger, N.; Feyzeau, P. Path planning: A 2013 survey. In Proceedings of the 2013 International Conference on Industrial Engineering and Systems Management (IESM), Agdal, Morocco, 28–30 October 2013. [Google Scholar]
- Cheng, Y.; Zhang, W. Concise deep reinforcement learning obstacle avoidance for underactuated unmanned marine vessels. Neurocomputing 2018, 272, 63–73. [Google Scholar] [CrossRef]
- Liyong, M.; Wei, X.; Haibin, H. Convolutional neural network based obstacle detection for unmanned surface vehicle. Math. Biosci. Eng. 2020, 17, 845–861. [Google Scholar] [CrossRef]
- Joohyun, W.; Nakwan, K. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean. Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]
- Shi, J.-h.; Liu, Z.-j. Deep Learning in Unmanned Surface Vehicles Collision-Avoidance Pattern Based on AIS Big Data with Double GRU-RNN. J. Mar. Sci. Eng. 2020, 8, 682. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, X.; Zheng, Y.; Du, Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors 2020, 20, 426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yarmohamadi, M.; Javadi, H.H.S.; Erfani, H. Improvement of robot path planning using particle swarm optimization in dynamic environments with mobile obstacles and target. Adv. Stud. Biol. 2011, 3, 43–53. [Google Scholar]
- Xia, G.; Han, Z.; Zhao, B.; Liu, C.; Wang, X. Global Path Planning for Unmanned Surface Vehicle Based on Improved Quantum Ant Colony Algorithm. Math. Probl. Eng. 2019, 2019, 2902170. [Google Scholar] [CrossRef]
- Kavraki, L.; Svestka, P.; Latombe, J.-C.; Overmars, M. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Mao, Y.S.; Du, K.J.; Hu, B.Q.; Song, L.F. Simulation on Local Obstacle Avoidance Algorithm for Unmanned Surface Vehicle. Int. J. Simul. Model. 2016, 15, 460–472. [Google Scholar] [CrossRef]
- Zhuang, J.Y.; Zhang, L.; Zhao, S.Q.; Cao, J.; Wang, B.; Sun, H.B. Radar-based collision avoidance for unmanned surface vehicles. China Ocean Eng. 2016, 30, 867–883. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, R.; Liu, D.; Huang, L.; Liu, G.; Deng, T. Local reactive obstacle avoidance approach for high-speed unmanned surface vehicle. Ocean Eng. 2015, 106, 128–140. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Zhang, G.; Deng, Y.; Zhang, W. Robust neural path-following control for underactuated ships with the DVS obstacles avoidance guidance. Ocean Eng. 2017, 143, 198–208. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Collision Avoidance System for Unmanned Surface Vehicles With Leader-Follower Structure. IEEE Access 2019, 7, 24691–24702. [Google Scholar] [CrossRef]
- Arzamendia, M.; Gregor, D.; Reina, D.G.; Toral, S.L. An evolutionary approach to constrained path planning of an autonomous surface vehicle for maximizing the covered area of Ypacarai Lake. Soft Comput. 2019, 23, 1723–1734. [Google Scholar] [CrossRef]
- Vagale, A.; Oucheikh, R.; Bye, R.T.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles I: A review. J. Mar. Sci. Technol. 2021, 26, 1292–1306. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local Path Planning for Unmanned Surface Vehicle Collision Avoidance Based on Modified Quantum Particle Swarm Optimization. Complexity 2020, 2020, 1–15. [Google Scholar] [CrossRef]
- Warren, C.W. Global path planning using artificial potential fields. In Proceedings of the 1989 International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 316–321. [Google Scholar]
- Song, J.; Hao, C.; Su, J. Path planning for unmanned surface vehicle based on predictive artificial potential field. Int. J. Adv. Robot. Syst. 2020, 17, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Miura, J. Support Vector Path Planning. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2894–2899. [Google Scholar]
- Sarkar, S.; Hall, E.; Kumar, M. Mobile robot path planning using support vector machines. In Proceedings of the ASME Dynamic Systems and Control Conference, Ann Arbor, MI, USA, 20–22 October 2008. [Google Scholar]
- Quoc, H.D.; Seiichi, M.; Hossein, T.; Nejad, N.; Long, H. Dynamic and Safe Path Planning Based on Support Vector Machine among Multi Moving Obstacles for Autonomous Vehicles. IEICE Trans. Inf. Syst. 2013, 96, 314–328. [Google Scholar]
- Morales, N.; Toledo, J.; Acosta, L. Path planning using a Multiclass Support Vector Machine. Appl. Soft Comput. 2016, 43, 498–509. [Google Scholar] [CrossRef]
- Vagale, A.; Bye, R.T.; Oucheikh, R.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles II: A comparative study of algorithms. J. Mar. Sci. Technol. 2021, 26, 1307–1323. [Google Scholar] [CrossRef]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Wentao, M.; Jiucheng, X.; Chuan, W.; Longlei, D. A fast and robust model selection algorithm for multi-input multi-output support vector machine. Neurocomputing 2014, 130, 10–19. [Google Scholar] [CrossRef]
- Peduzzi, P.; Concato, J.; Kemper, E.; Holford, T.R.; Feinstein, A.R. A simulation study of the number of events per variable in logistic regression analysis. J. Clin. Epidemiol. 1996, 49, 1373–1379. [Google Scholar] [CrossRef] [PubMed]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}