1. Introduction
Due to the increasing attention on ocean environment protection, many measures have been put forward to reduce greenhouse gas emissions, improve energy efficiency and reduce fuel consumption. The Maritime Environment Protection Committee (MEPC) in International Maritime Organization (IMO) at MEPC 78 (June 2022) has discussed and adopted a series of guidelines [
1,
2,
3,
4] for short-term measures, including the revised Ship Energy Efficiency Management Plan (SEEMP) and the Carbon Intensity Indicator (CII) coefficient revision. CII is a new method to measure CO
2 emissions from ship operations. In terms of ship operations, CII will be used as an indicator to characterize the actual operational energy efficiency level of ships. In addition, as an indicator of the operational carbon intensity of ships, CII will also be used to measure whether shipping greenhouse gas emissions meet the requirements of the IMO preliminary strategy. After the enforcement of these rules, the attained CII of a ship will be calculated based on the data collected throughout the previous calendar year, and the CII grade for the current year shall be determined based on the CII discount rate. The CII grades are A–E, and ships that have received grade E for one year or grade D for three consecutive years must propose a plan to improve their grade and record it in SEEMP.
In recent decades, various new concepts of Energy Saving Devices (ESDs) and innovative hull forms have been developed in improving the overall propulsion efficiency to meet the increasingly restrictive EEDI requirements [
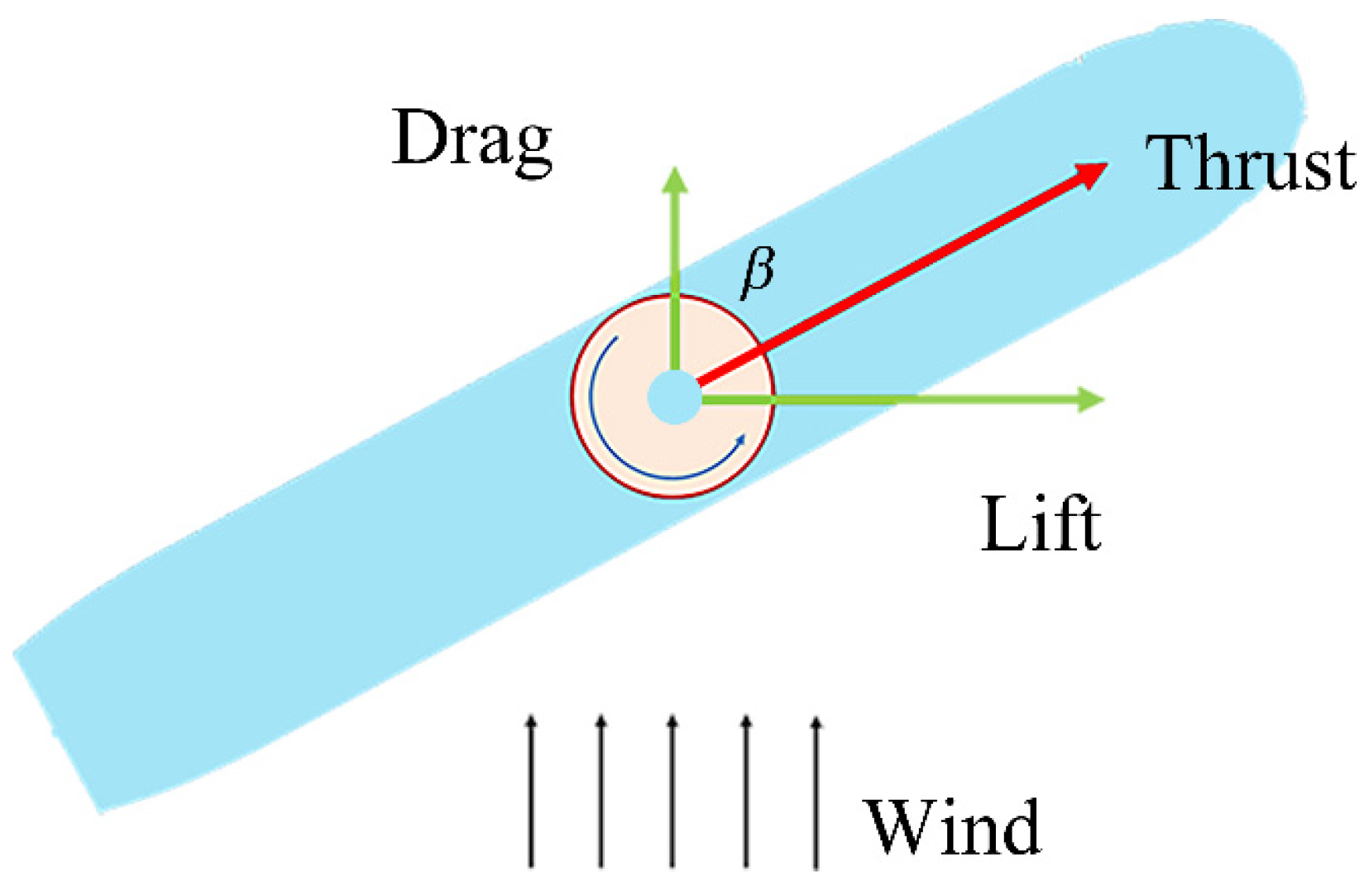
2]. As the traditional efforts on hydrodynamic energy saving is gradually reaching their limit, some innovative Energy-Saving Devices such as wind-assisted rotors and wind sails were adopted and equipped on ship decks to produce additional thrust. These types of ESDs are more dependent on the weather condition, thus the selection of ship routes will directly affect the effectiveness of these devices.
Ship weather routing is an efficient way to help improve the ship’s operational efficiency and reduce the shipping cost from the view of an economic long-term voyage. The underlying purpose of this economical ship routing is to establish the optimum path and operational profile for the long-distance voyage, as the shortest route is not always the fastest or the most economical way due to the effect of various sea states. Traditionally, the ship’s route is determined by the captains based on their experience and personal capability. This could be improved with advanced technologies included in the Integrated Bridge System such as Electronic Chart Display and Information Systems (ECDISs) which could obtain real-time weather forecasts data, display ship and environment information and provide route planning [
5]. There are numerous methods, programs and software that have been developed and equipped on ships in operation. The core algorithms for these methods could be simply divided into two categories [
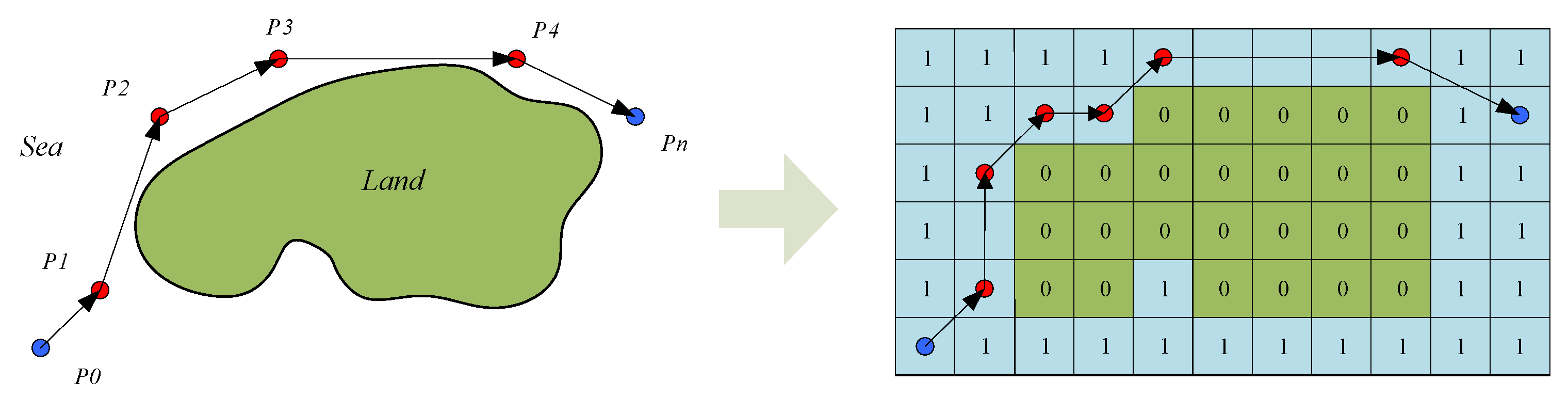
6]: cell-based methods and cell-free methods. The cell-based methods require a discretization of the sea chart and generate the ship’s path by searching the discrete cells. The most widely used cell-based methods are the A* algorithm [
7,
8] and the Dijkstra algorithm [
7]. The latter one is the most classic path-routing algorithm based on graph theory and the A* algorithm is an advanced version of the Dijkstra algorithm that introduces the greedy property to improve the searching efficiency. For better speed planning in weather routing, a 3D Dijkstra optimization algorithm [
9] was also proposed to generate globally optimal ship routes that encounter less harsh offshore environments and reduce fuel consumption. Some other modifications are also proposed to improve different applications such as greenhouse gas emission control [
10]. Cell-free methods are derived from the classical routing practices in navigation. The main idea of the currently developed cell-free method derives from the classical way of ship routing based on conventional paper charts such as the isochrone method. For example, the classic isochrone method [
11] proposed by Hanssen and James could determine an economical route but has some difficulty with voyages with many obstacles. Some improvement [
8] has been made to solve this problem and was extensively applied to the simultaneous determination [
6] of ship routes. Recently, an improved method [
10] that considered the advantages and disadvantages of both cell-based methods and cell-free methods was proposed to improve the cell-based path planning algorithm for the generation of optimal weather routes. Meanwhile, comprehensive software for ship weather routing is designed [
12] where the wave condition is taken as the optimization objective, and the A* algorithm is used to achieve the optimal route generation. On the other hand, the cell-free method is not confined by the discretization of a sea chart and could make a continuous search of all directions and positions. Roh overviewed the most widely used ship-routing methods and proposed an improved version with the consideration of obstacles [
13]. The 3D dynamic programming algorithm [
14] is also a cell-free method that could generate an optimal path and speed profile. In addition to the above two categories, many studies transform the weather route-planning problem into an optimization problem for solving. In study [
15], a ship meteorological route path-optimization algorithm based on a multi-objective genetic algorithm was proposed by considering ship characteristics and rough weather conditions. With the minimization of total voyage time and total fuel consumption as the optimization objective, the optimal route and speed are realized. Some evolutional methods such as the improved ant colony algorithm were introduced to improve the convergence speed and avoid the local optimum for a ship’s weather path generation [
16]. The result shows that the optimized route planned by the algorithm can avoid dangerous areas in the term of the voyage and ensure the safety of the ship at sea. In addition, based on the original fractional order particle swarm optimization algorithm, the new coefficients of the fractional order velocity update formula are improved to avoid falling into local optimization [
17]. On this basis, the ship weather route of a VLCC tanker is optimized with the minimum fuel consumption.
Another important issue in weather routing is the estimation of total fuel consumption (TFOC) among sea states. As the performance of the ship changes with sea states, the total resistance will increase in severe sea states with high waves, and thus, ship speed will reduce with the same engine power compared with still water conditions. Additionally, with the equipment of wind-assisted rotors, the rotor system will produce a favorable thrust in sea states with a strong side wind. The estimation of total fuel consumption should consider both wave-added resistance [
18,
19] and rotor-added thrust [
20] and then help to generate the most efficient path and operation file. The TFOC could be estimated according to theory-based or practice-based methods [
6]. Roh [
8] established a method for estimating fuel consumption by calculating the horsepower compensation due to a bad sea state following the theory-based method of ISO 15016 [
21]. On the other hand, Lee et al. utilize a practice-based method with past ship-operation data. This is an easy-to-use way with the help of a nonlinear multiple regression model. In recent years, with the development of big data, artificial intelligence technologies and machine learn-based methods have been widely used in ship fuel consumption estimation. Many studies have applied the black box model of neural network to the prediction of shipping fuel consumption [
22,
23,
24,
25,
26,
27]. Based on the noon report data and automatic monitoring data, such as support vector machine, random forest, extra tree regression and artificial neural networks, and concluded that random forest and extra tree had the best prediction performance [
22]. Similarly, BP neural network, deep belief network, K-nearest neighbor, decision tree and support vector regression were used to establish ship fuel consumption prediction models, and the applicability and advantages of these algorithms were explained in detail [
24]. Taking wind speed, draft, water velocity, rudder angle and ship speed as input parameters, an artificial neural network model could be applied for fuel consumption prediction based on the measured sailing data [
25]. Additionally, methods combining artificial neural networks and multiple regression are widely used to estimate the power and fuel consumption of ships [
26], and it could better realize the real-time prediction and is more adaptive to possible changes in the ship environment. In addition, a more systematical forecasting framework [
27] for ship fuel consumption based on the least absolute shrinkage and selection operator regression algorithm is a new trend.
In this paper, an improved ship weather routing framework towards low carbon shipping and CII reduction is proposed based A* algorithm and complex FOC estimation models. This article is organized as follows:
Section 2 gives the main methodology, including data-acquisition, improvement of the classic A* algorithm and estimation methods for fuel consumption and CII. A detailed analysis based on a VLCC ship from China to the Middle East is provided in
Section 3 to illustrate the effect of the proposed methods. In
Section 4, a short conclusion is presented and a plan for future research is given.
3. Applications
The optimization method proposed in this paper was applied to the VLCC test case. In the route optimization procedure, the increase in ship resistance in the sea state will certainly change the powering curve and thus, lead to the reduction in ship speed while the existence of the rotor system will compensate for this.
We simulate the ship-routing problem for a VLCC from China to the Middle East for oil trade. This route makes its way through the East China Sea, the South China Sea, Singapore, the Indian Ocean and the Strait of Hormuz. A typical characteristic ff the Indian Ocean route is the strong side-wind which is positive to the wind-added rotors. Similarly, five routes were generated by the proposed algorithm with different weather, power and rotor considerations. To analyze the effect of different method combinations, 30 cases for every combination are simulated based on different dates of departure to achieve a statistical result of routing. The meaning of the keywords for different method selections in column 2 of
Table 3 are listed for better understanding:
Shortest Route: Only the shortest path searching based on the Euclidean distance is applied;
Weather: Weather routing considering the effect of the wave and wind;
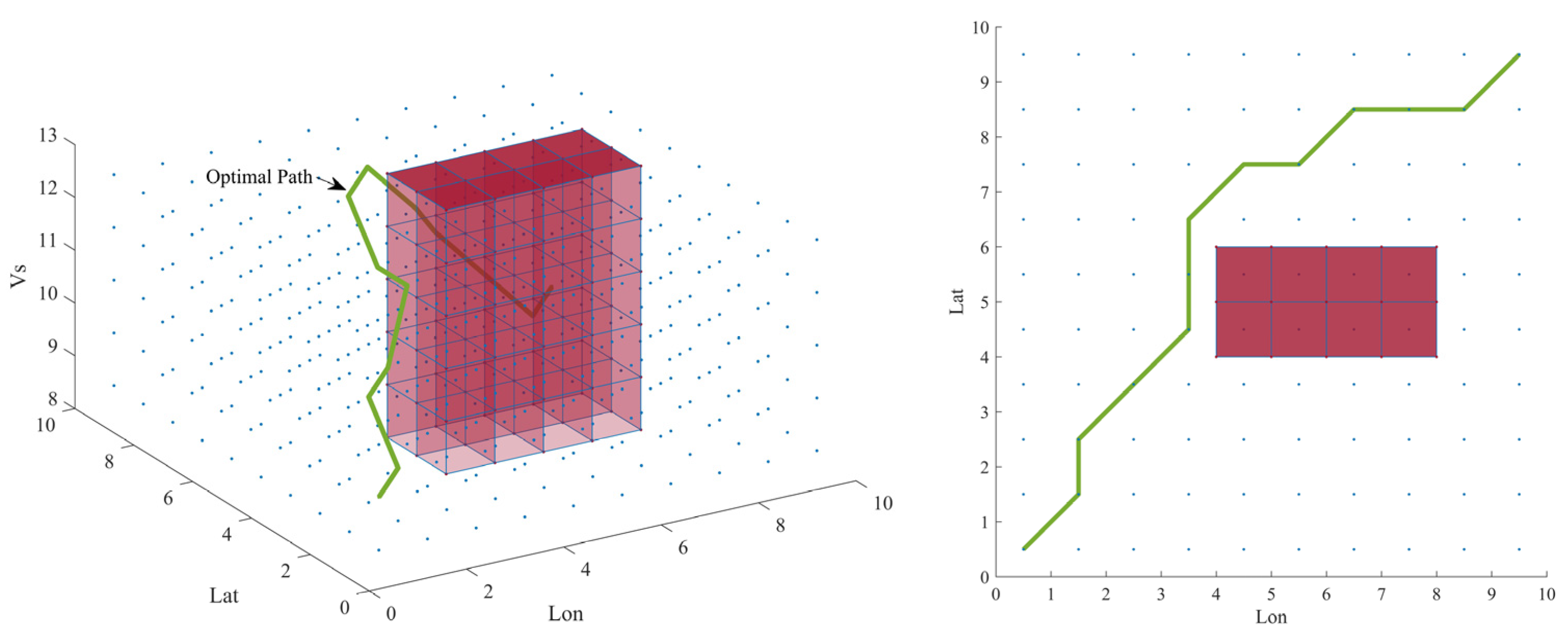
Speed Optimization: The 3D A* algorithm is activated to optimize the engine delivery power to achieve the optimal ship speed;
Rotors: The effect of wind-assisted rotors is considered.
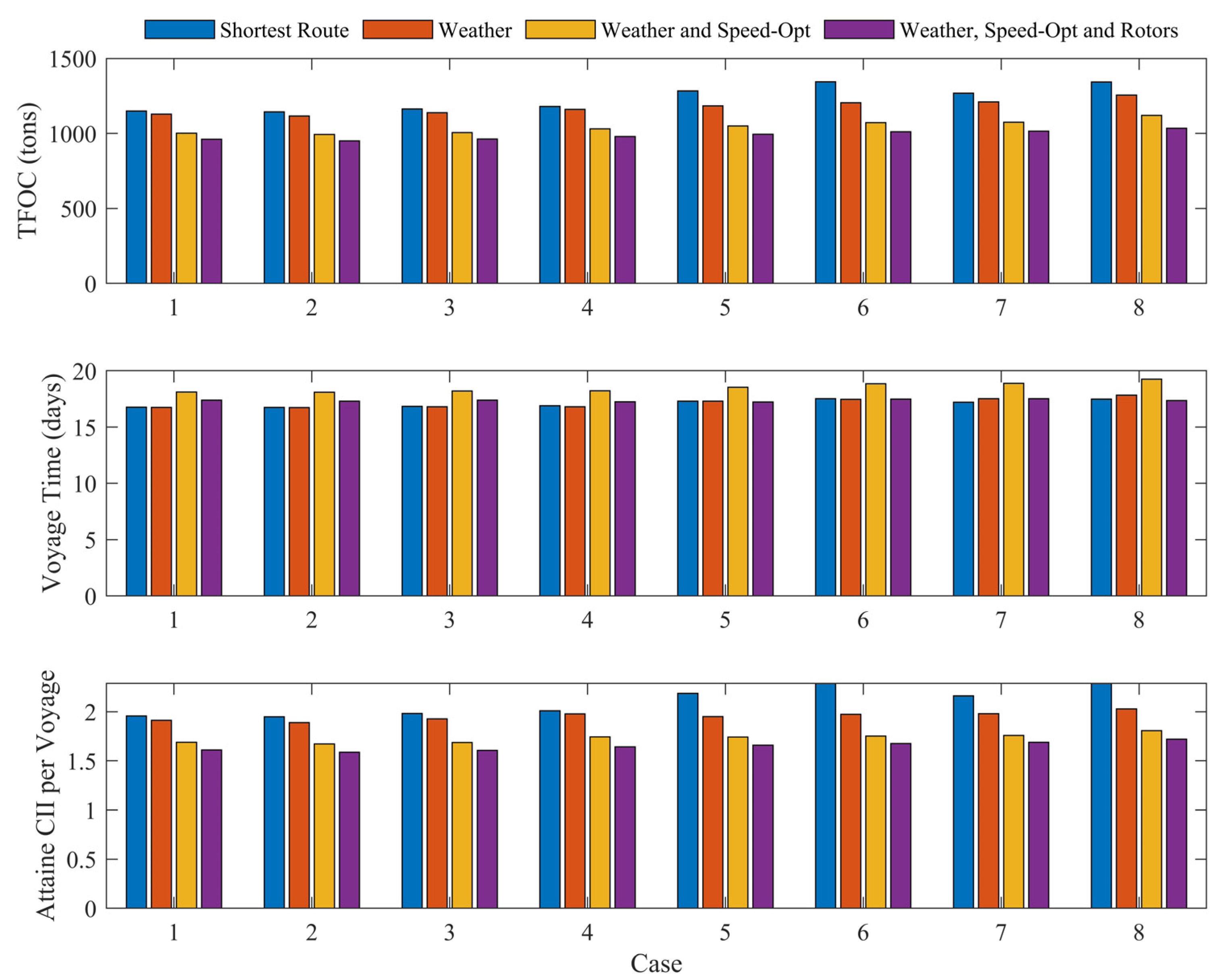
Table 3 summarizes the averaged routing results over 30 cases per method and object combination and the results of eight selected cases are shown in
Figure 17. It could be figured out that weather routing could provide a 4.61% reduction in TFOC and a 8.89% reduction in CII on this voyage with almost the same voyage time. Further, the speed optimization in a preassigned range could provide a 10.61% additional reduction in TFOC and 10.58% of CII, respectively. On this basis, with the help of wind-assisted rotors, the joint optimization of routes, speed and rotor operation speed could contribute an additional 4.41% reduction in TFOC and 3.90% of CII. As shown in
Figure 17, for different cases with different ocean weather conditions, the fuel consumption, voyage time and attained CII have great differences but the contributions from different routing techniques are similar. Due to the third power relationship between the ship’s speed and delivery power, speed optimization always contributes the most part to the TFOC and CII reduction and always leads to a lower average speed, and thus a longer voyage time.
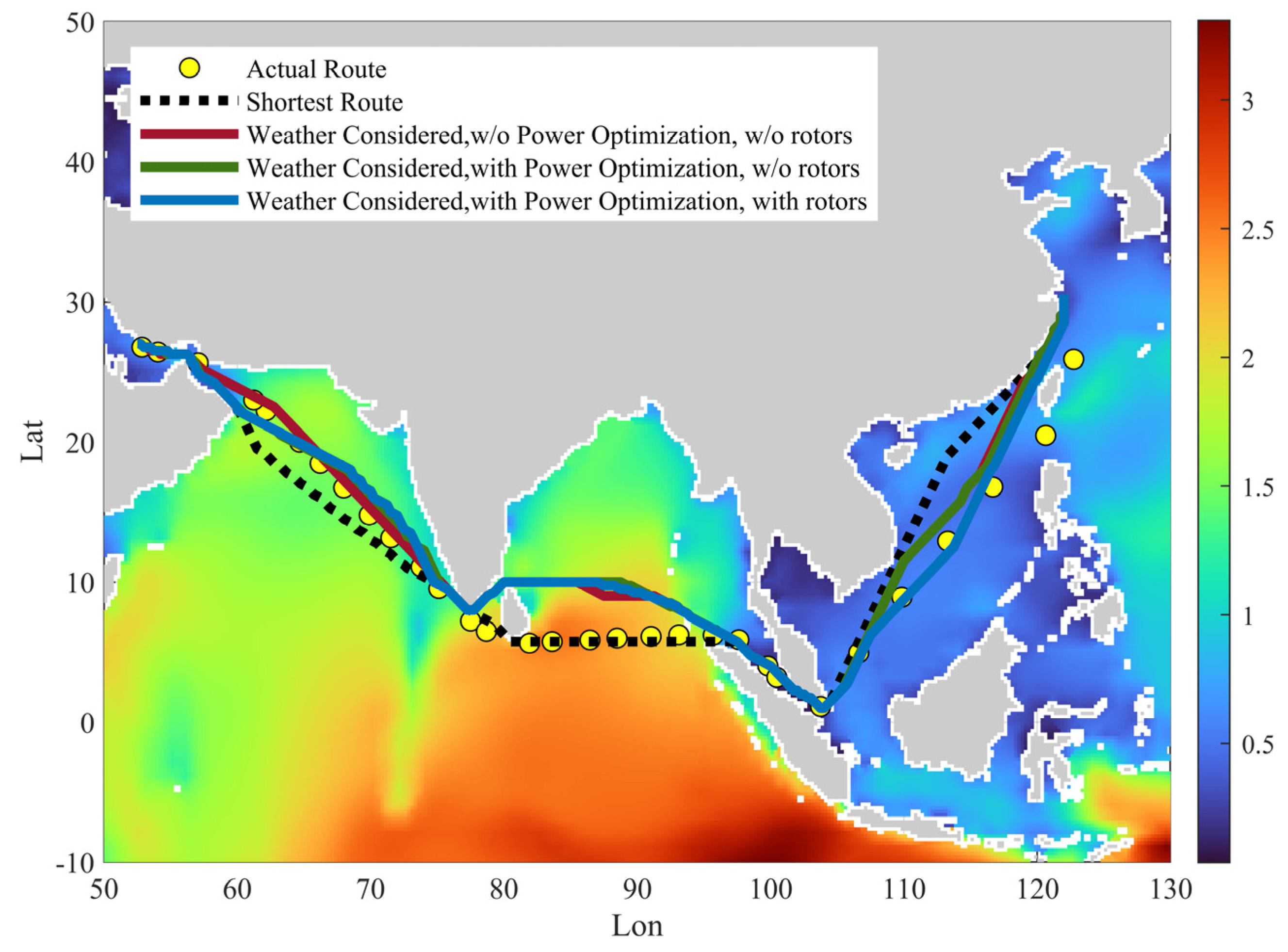
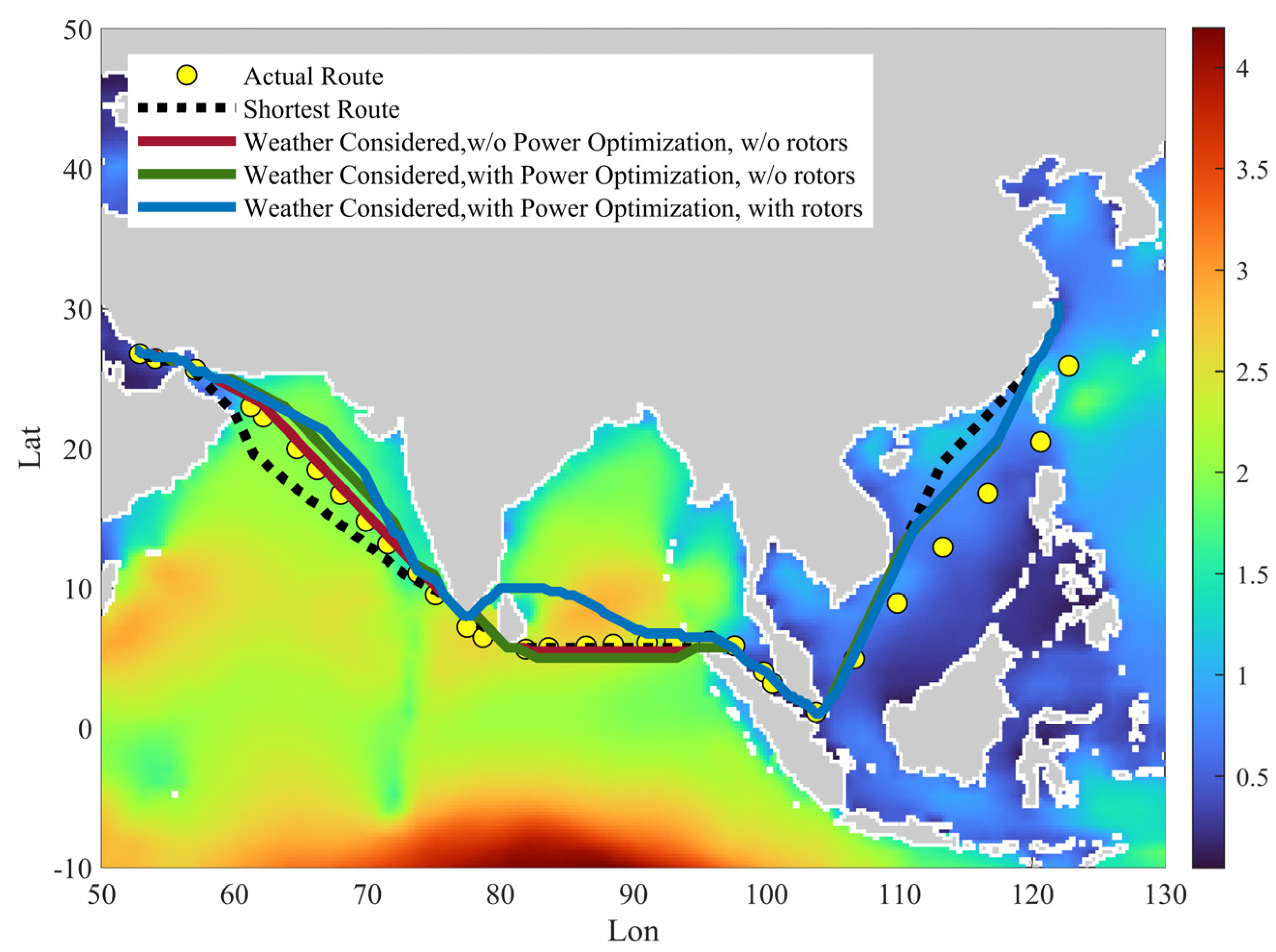
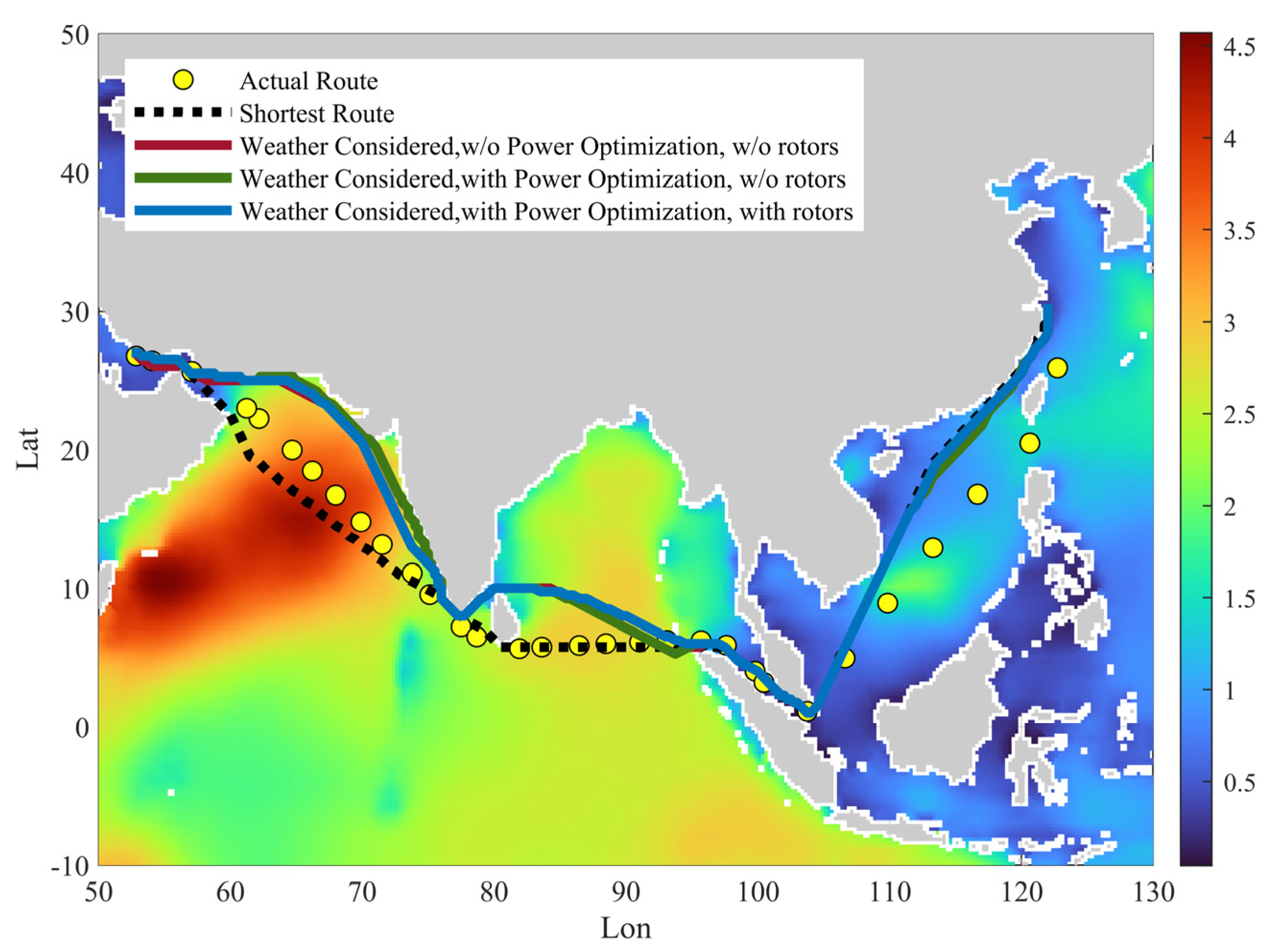
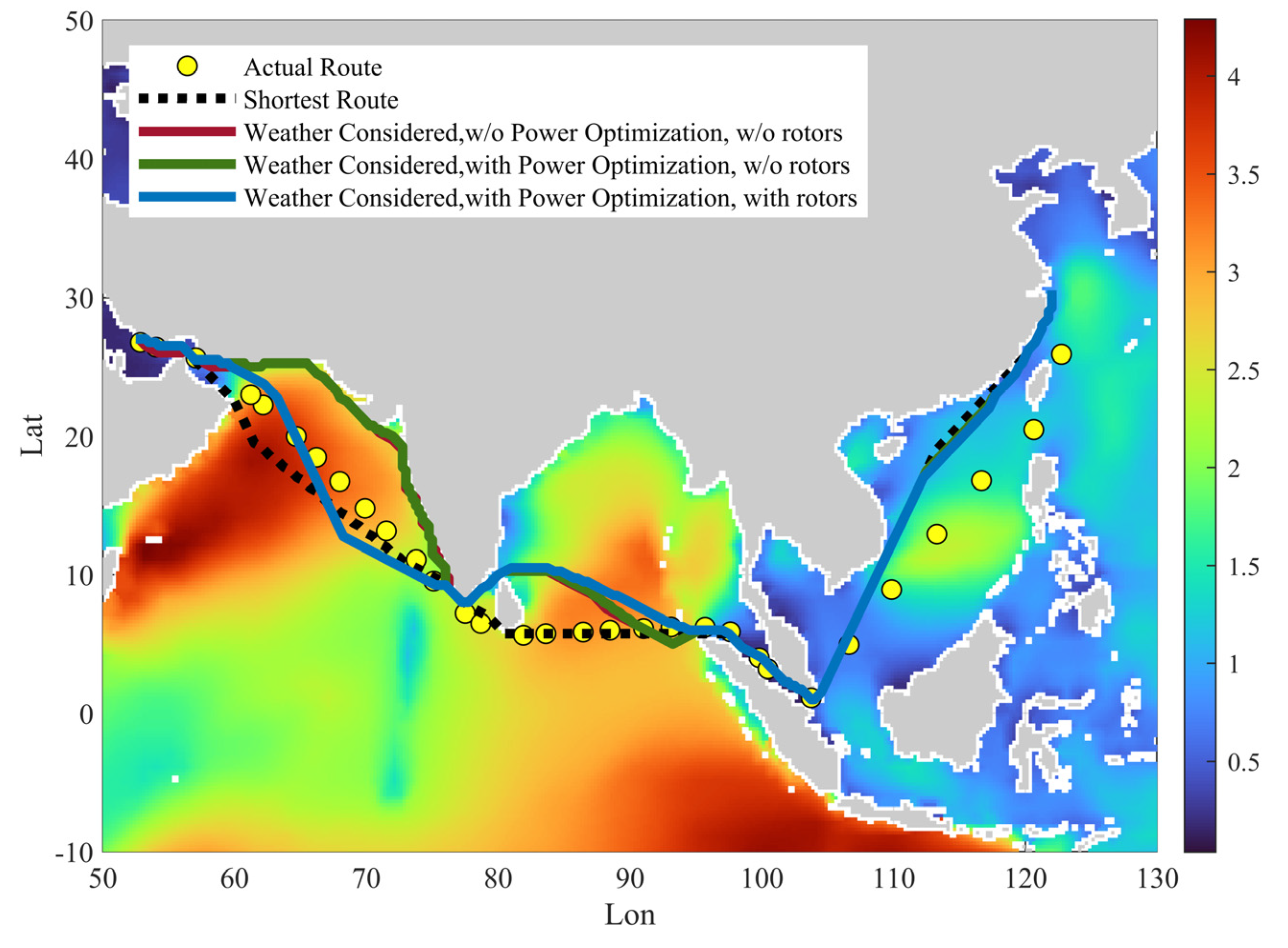
Four typical cases (1, 4, 6, 8) are selected to illustrate the difference of the resultant routes in geographic maps (
Figure 18,
Figure 19,
Figure 20 and
Figure 21). Considering the effect of s realistic ocean weather, the optimized routes will differ greatly from the simple shortest route especially for routes with speed optimization and rotors. The routes from weather routing could automatedly avoid severe sea conditions to achieve lower fuel consumption. For relatively mild sea states, like case 1 (
Figure 18), the results from three different weather-routing strategies (MC2, MC3 and MC4) show similar routes. Usually, ships with wind-assisted rotors prefer to pass through some slightly rough seas to achieve a more beneficial side-wind for larger thrust from rotors (as shown in
Figure 19 and
Figure 21). When it meets a wide range of high ocean waves, the proposed method could plan routes to avoid additional fuel consumption.
4. Conclusions
An efficient and improved weather routing framework towards low-carbon shipping and CII reduction was proposed based on ocean weather forecast information and ship information considering the effect of an innovative energy-saving device: the wind-assisted rotor.
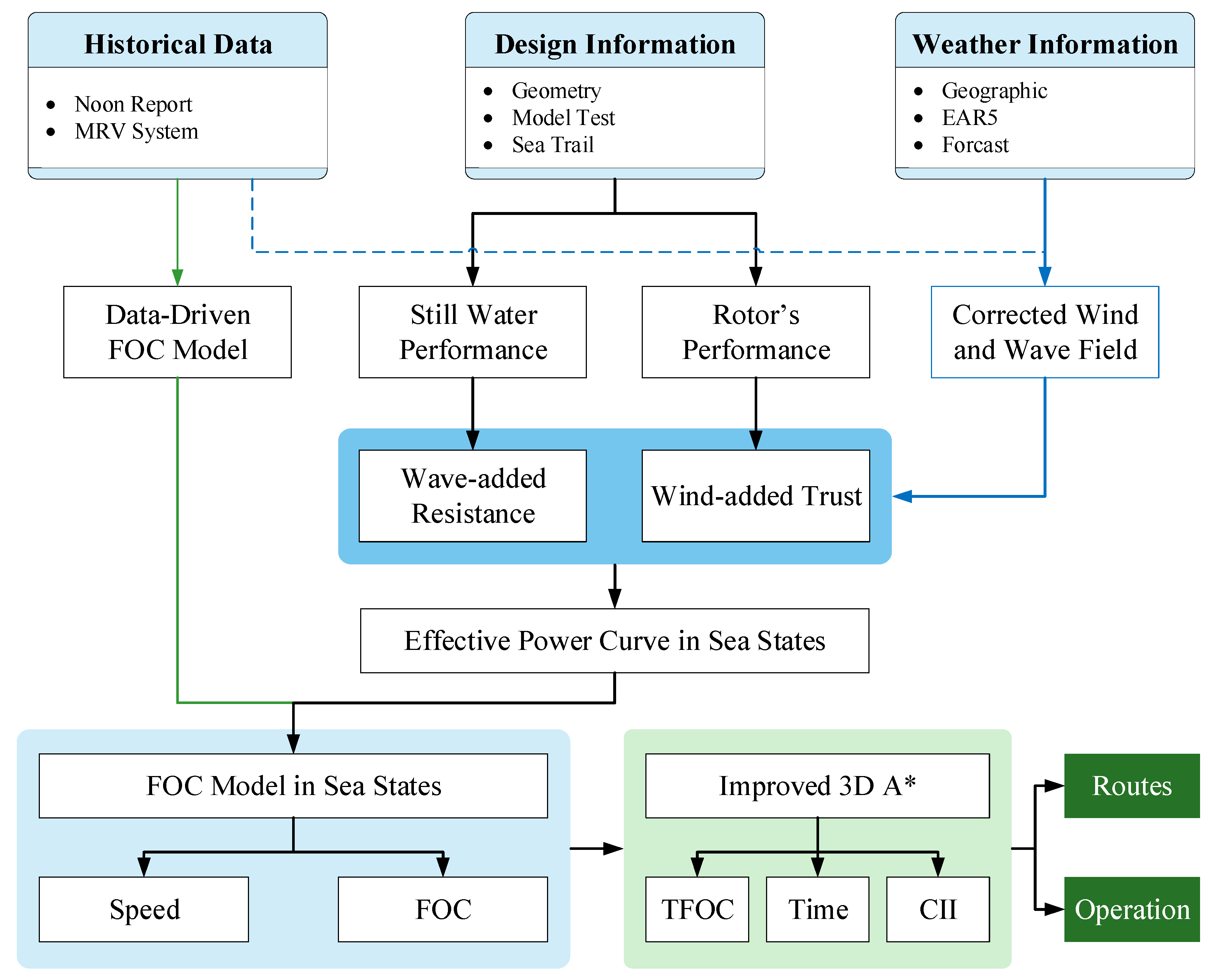
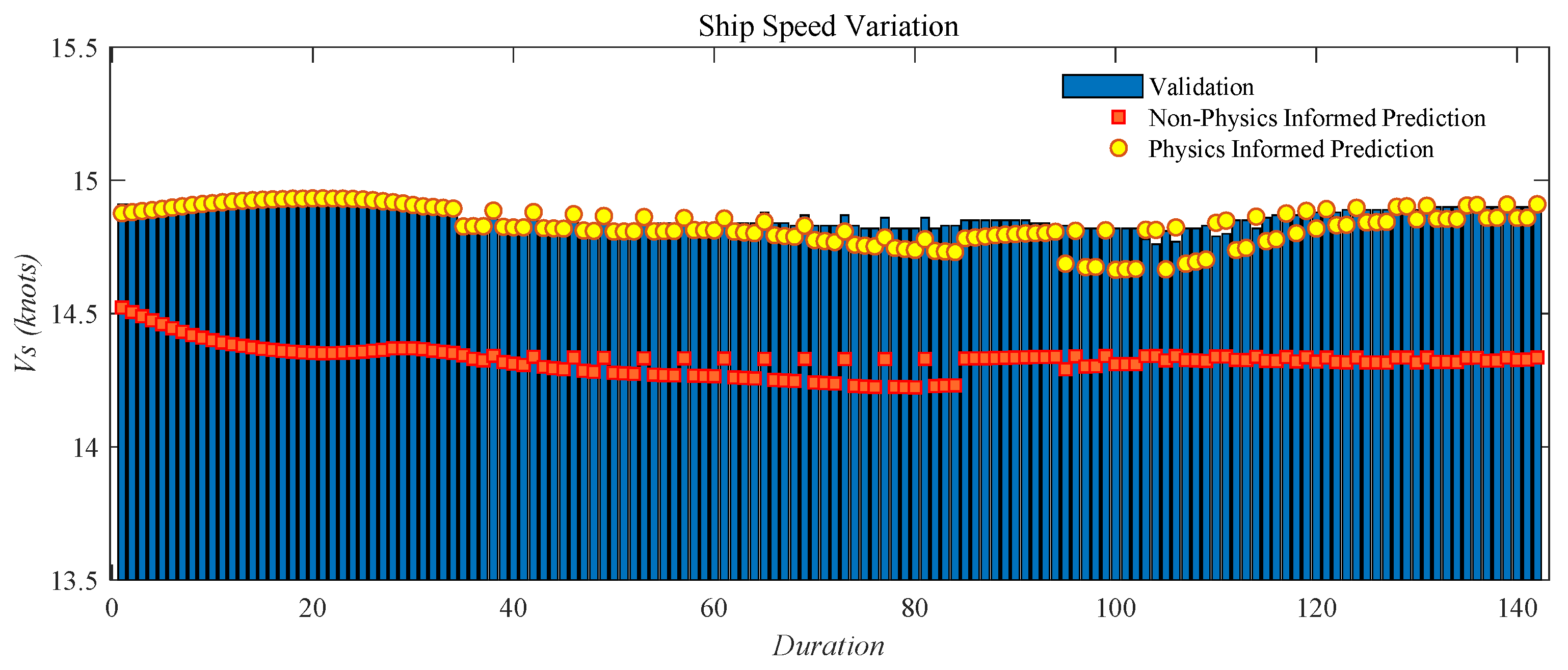
An improved A* algorithm including directed route searching and 3D capacity was presented in this paper with an enhancement of the searching range, searching efficiency and good incorporation with the operation optimization such as engine power and rotor speed. Additionally, based on historical ship report data, towering tank results and high-fidelity theory-based method for wave-added resistance and the air dynamic of wind-assisted rotors, a data-driven model for fast prediction of total fuel consumption was proposed and validated which could effectively replace the real-time calculation of the ship’s performance in a real sea state. The attained CII could be estimated, along with the routing task, to help monitor the carbon intensity of the current ship state.
The results show that the proposed method could generate optimized ship routes according to the local sea environment and the response of the ship. Compared to the shortest route, different combinations of routing methods could achieve the optimized route considering sea states that result in a reduction in TFOC, according to the sailing simulation for different cases. Statistically, weather routing, speed optimization and wind-assisted rotors could produce a 4.61%, 10.61% and 4.41% reduction in the total fuel consumption, respectively, in a single route from China to the Middle East and a similar reduction in the attained CII. The result shows that commercial ships, especially with environmentally dependent energy-saving devices such as rotors, could benefit a lot from proper weather routing and operation optimization.
With a joint optimization of ship speed, a higher energy saving could be achieved by economically modifying the engine power. The wind-assisted rotors could significantly provide a positive thrust and amplify the effect of route and operation optimization. In the Indian Ocean, wind-assisted rotors could have significant energy-saving possibilities for voyages with strong side-wind. The result proved that, with the proposed method, a more adaptive and economic solution for ship operation could be obtained, especially for ships with wind-assisted rotors.
In this paper, we proposed a general framework including the optimization method, TFOC estimation and route-generation procedure for economic ship routing and ship operation. It needs to be acknowledged that the analysis and simulations performed in this paper provide an ideal environment for the ship’s operation. It ignored the conditions when desired operations, such as the speed governing of the main engine and the driving motors of rotors, could not be achieved ideally. Additionally, the effect of wind-assisted rotors could be affected by the local properties of winds, waves, the ship’s motion and rudders. In the future, with more widespread applications of this kind of energy-saving device and more actual sailing data, the estimation could be more accurate for better routing.
In the future, more realistic models for the estimation of TFOC and safety should be considered to improve the engineering applicability of the current method. Additional objective functions should be tested in the economic ship-routing practice and the method should serve as state-of-the-art software for ships in operation. More detailed information from electronic sea charts and weather forecasts should be considered and more realistic demands from ship captains should be fully considered.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}