
Enhancing Power Transmission Stability of AUV’s Wireless Power Transfer System with Compact Planar Magnetic Coupler

 , ,
, ,
Abstract
:1. Introduction
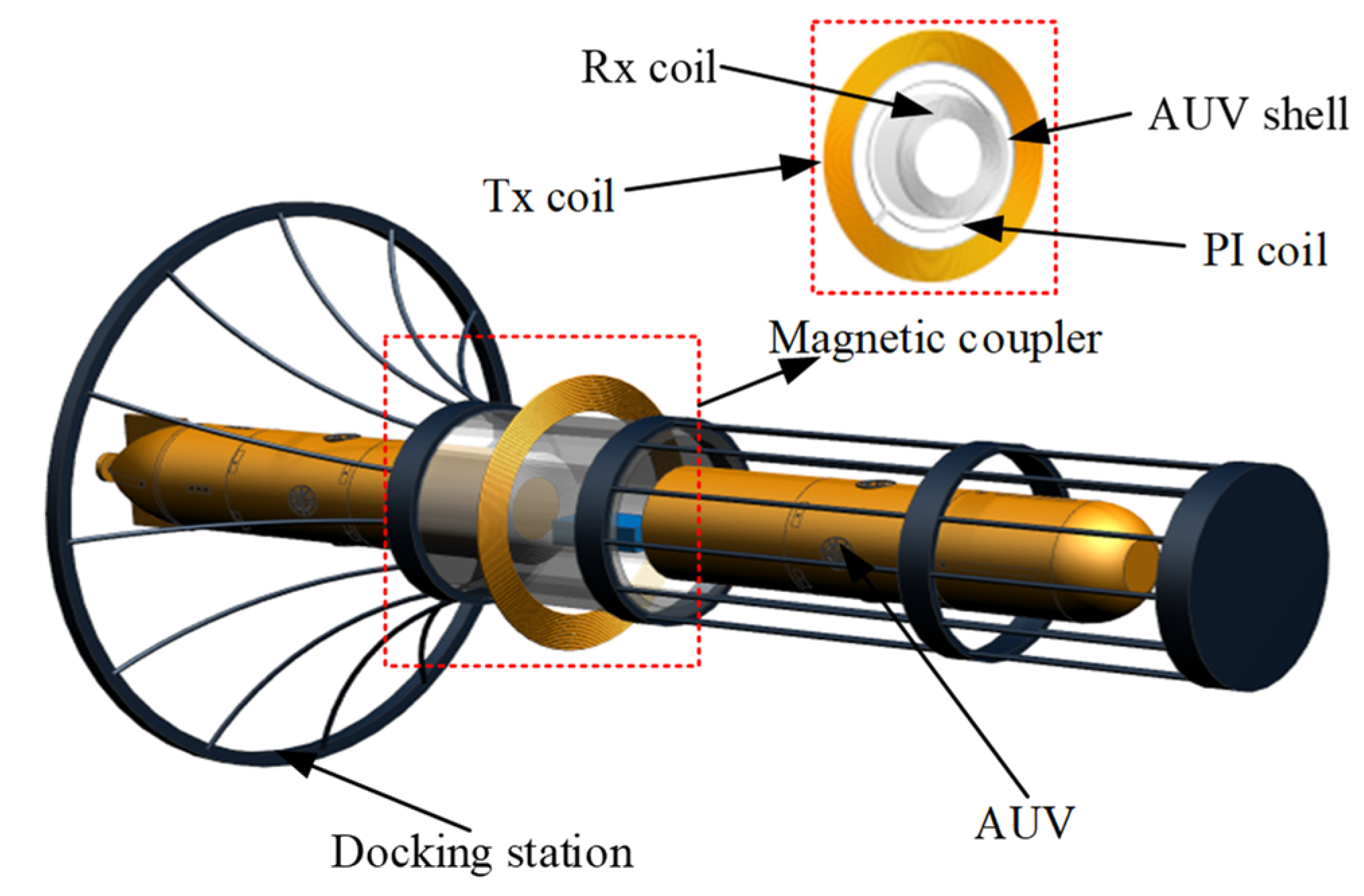
2. Magnetic Coupler Design
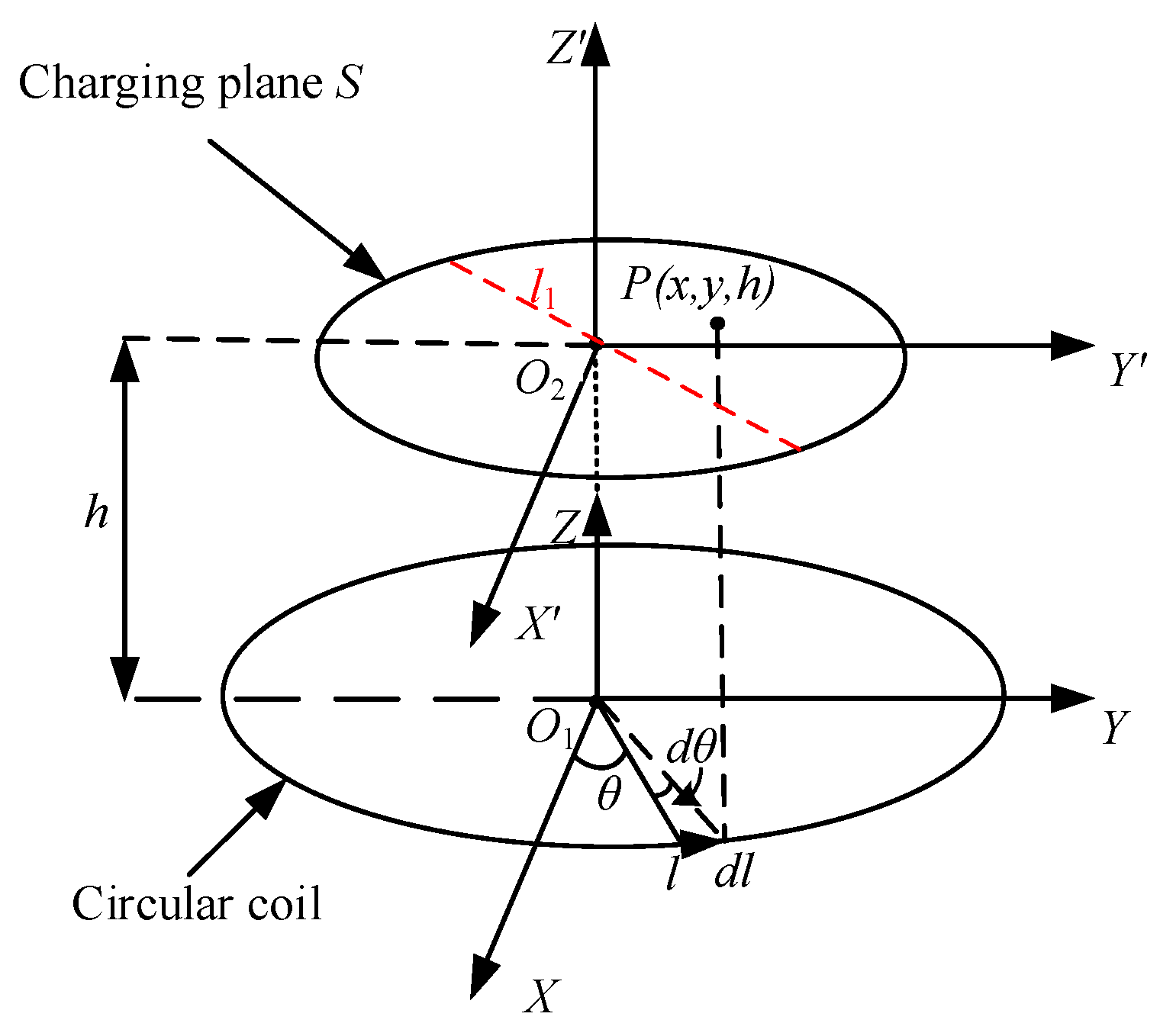
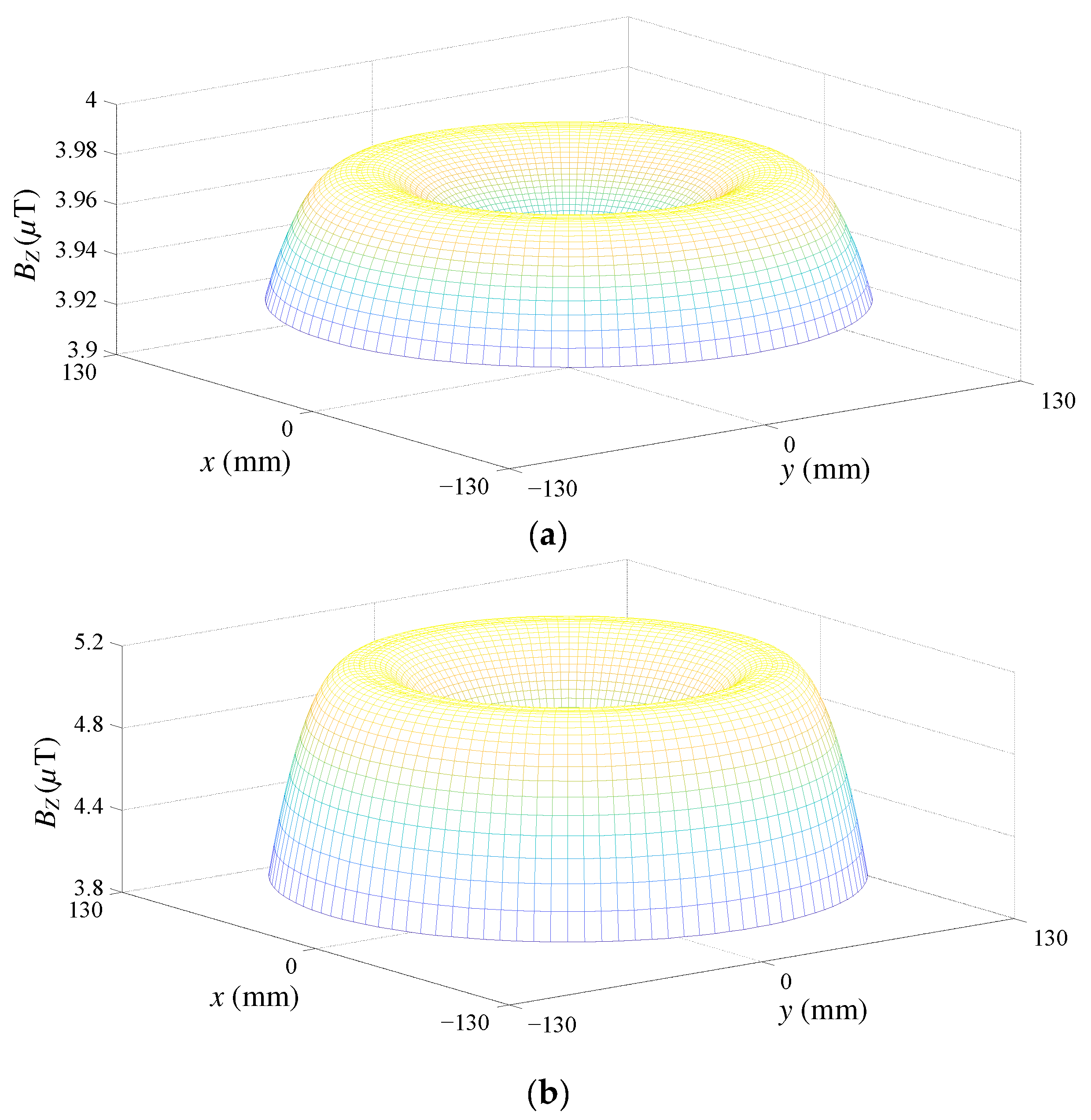
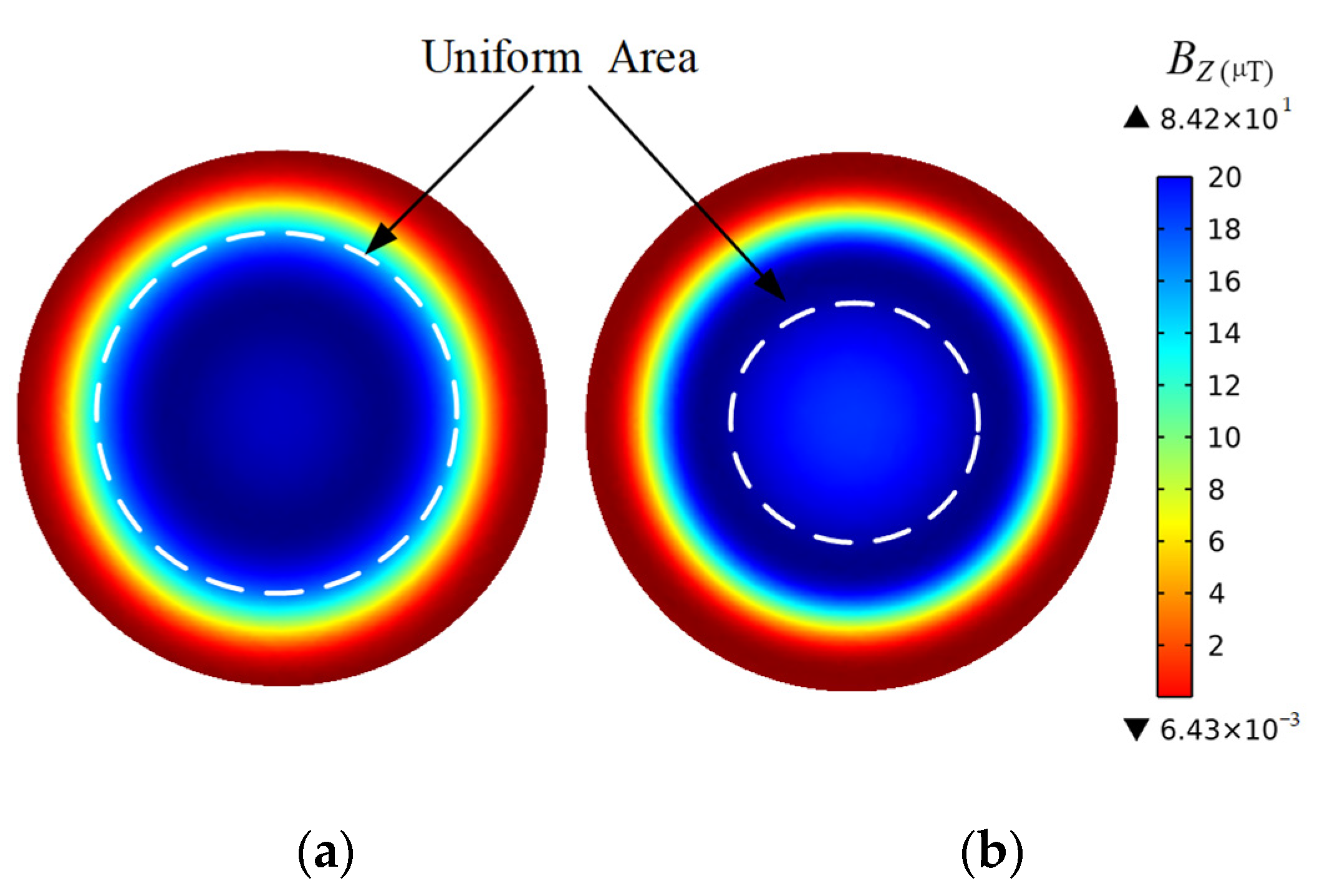
2.1. Discussion of Magnetic Field Distribution of Circular Coil
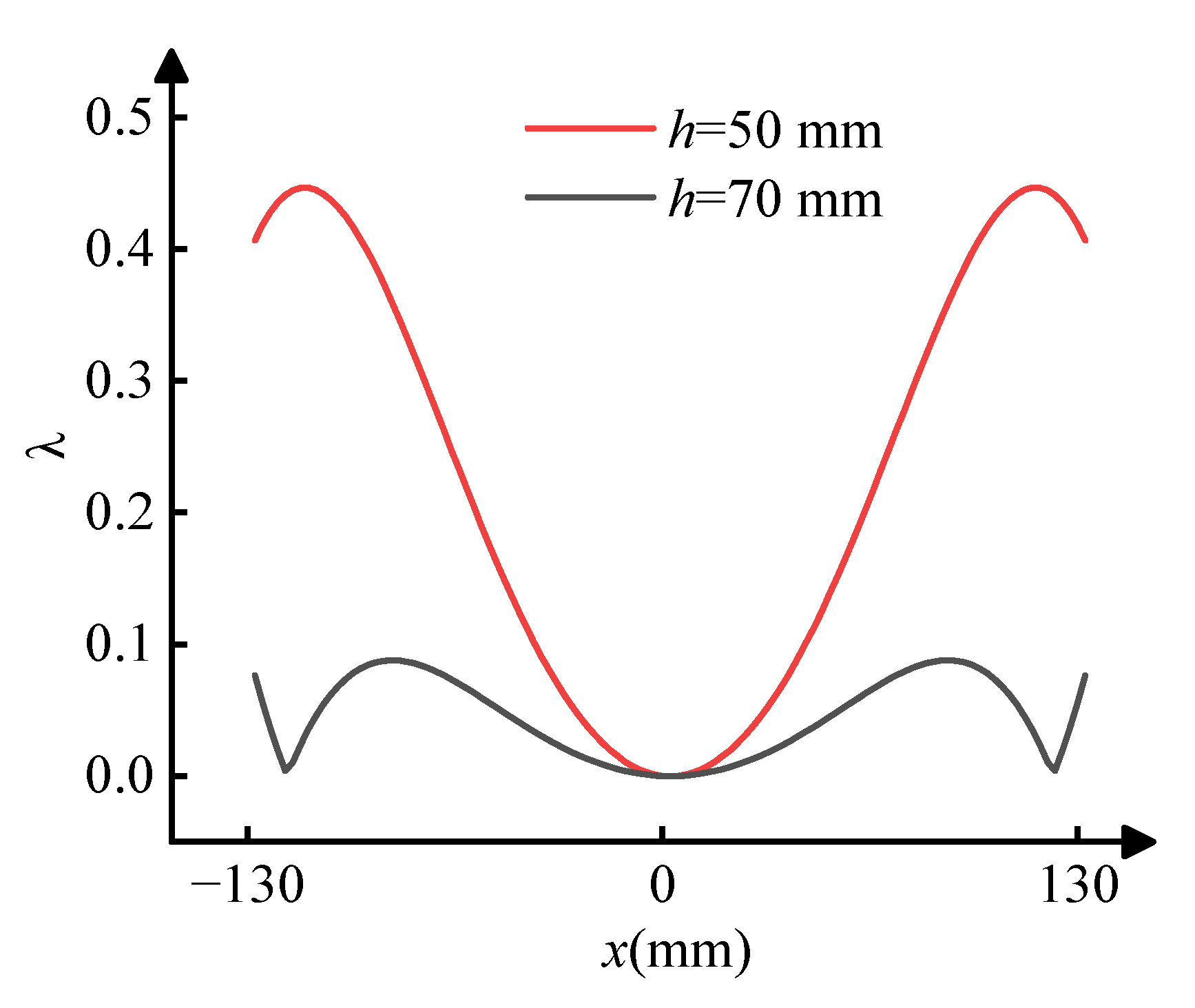
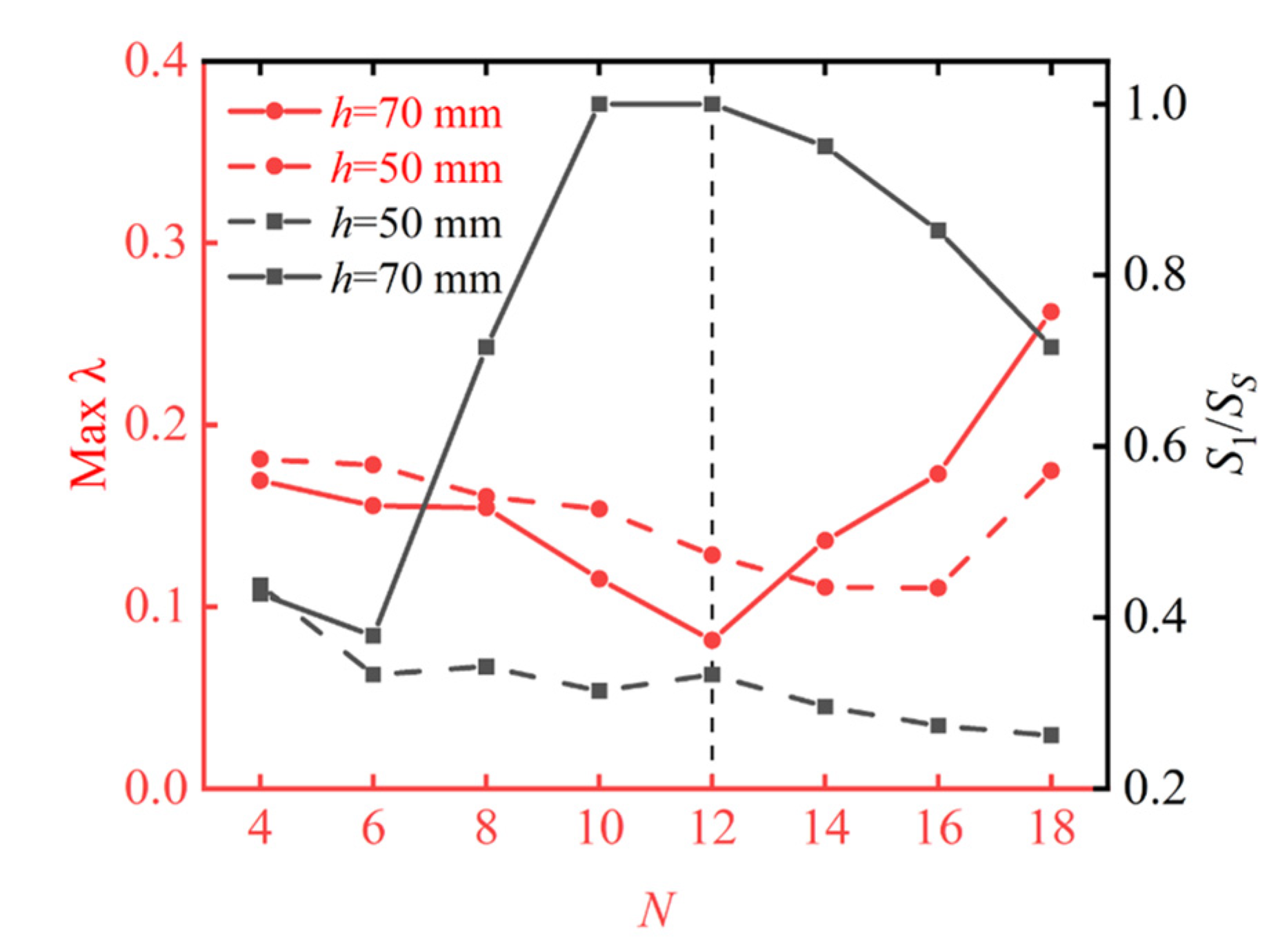
2.2. Analysis of the Circular Coil Turns
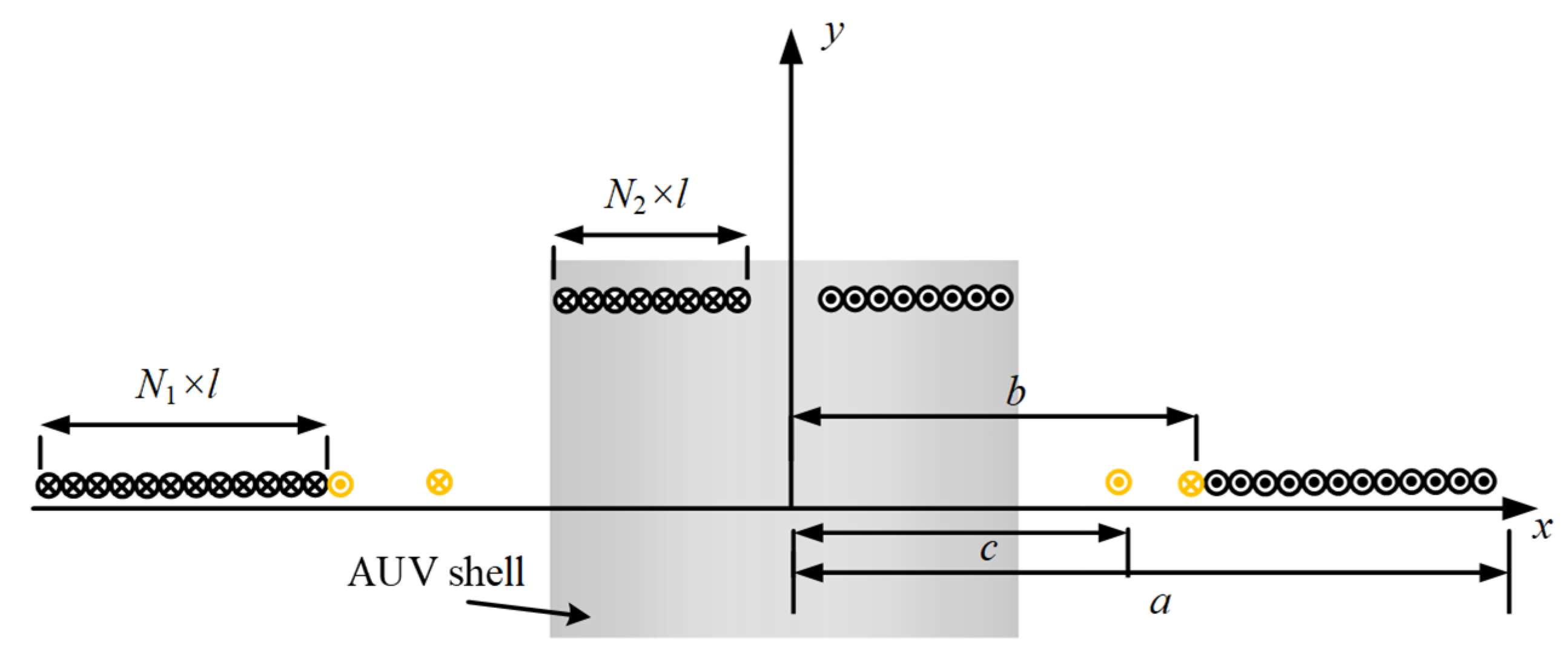
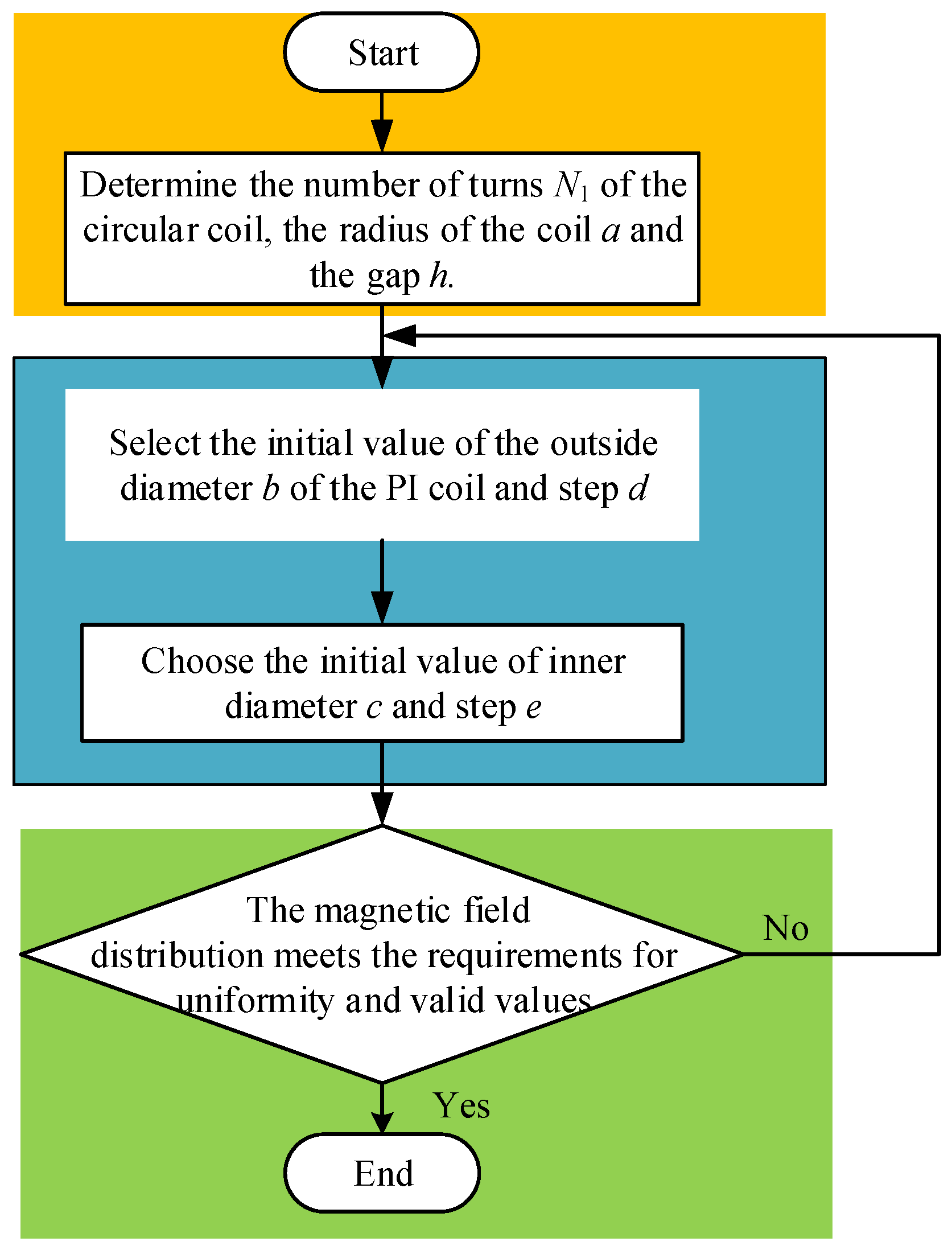
2.3. Constructing UMF with a PI Coil
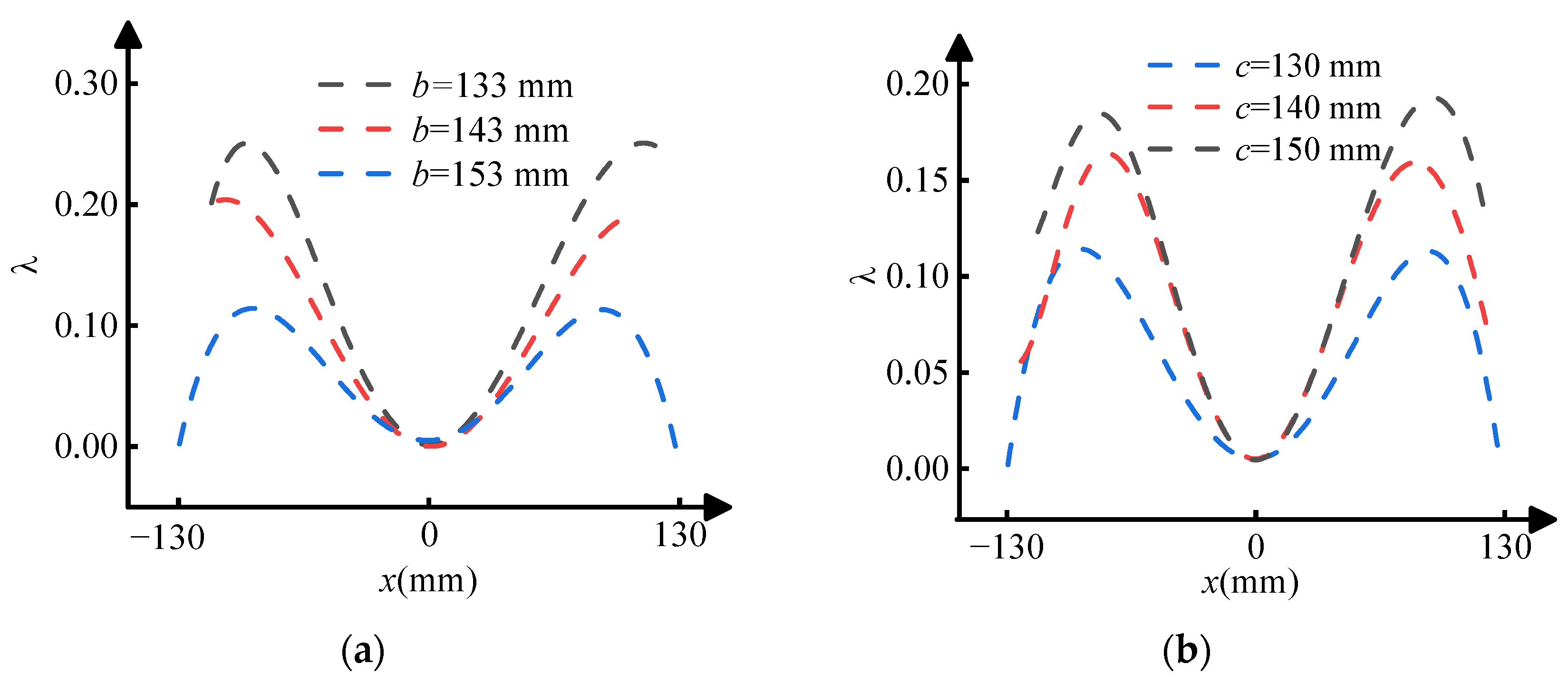
- By adjusting the parameters of the PI coil, the fluctuation of magnetic induction intensity can be reduced to extend the UMF area.
- The deviation of BZ distribution on line l1 reduces with the increase in the outer diameter of PI coil b. The outer diameter of the PI coil can be fixed to the inner diameter of the Tx coil.
- When the outer diameter of PI coil b is determined, the deviation of BZ distribution on line l1 reduces as the inner diameter of PI coil c decreases.
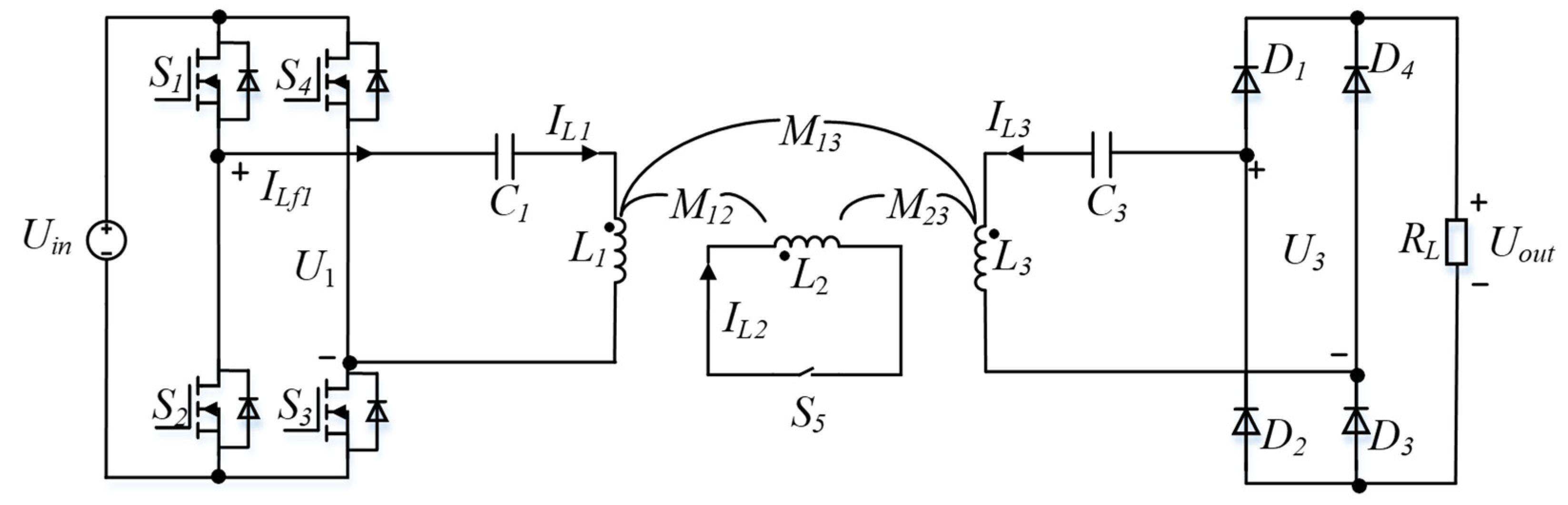
3. Circuit Design and Analysis
3.1. System Circuit Structure Design with a PI Coil
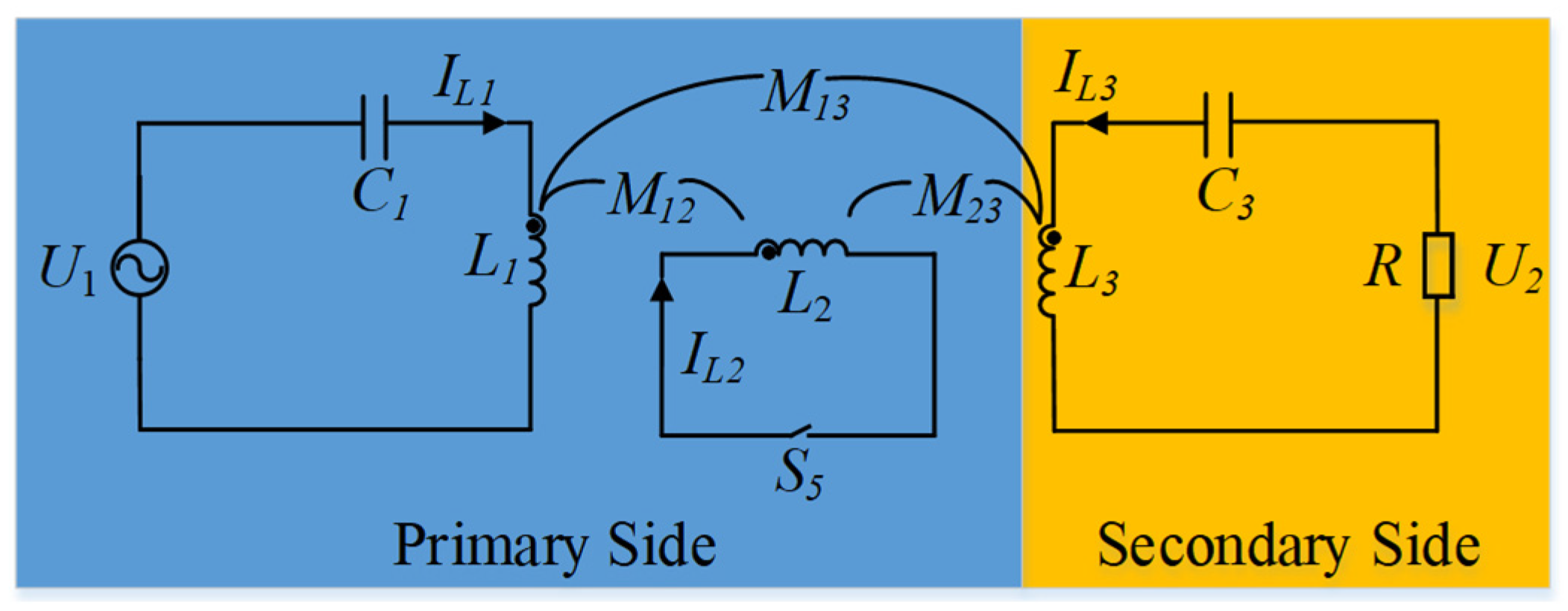
3.2. Circuit Modelling Analysis
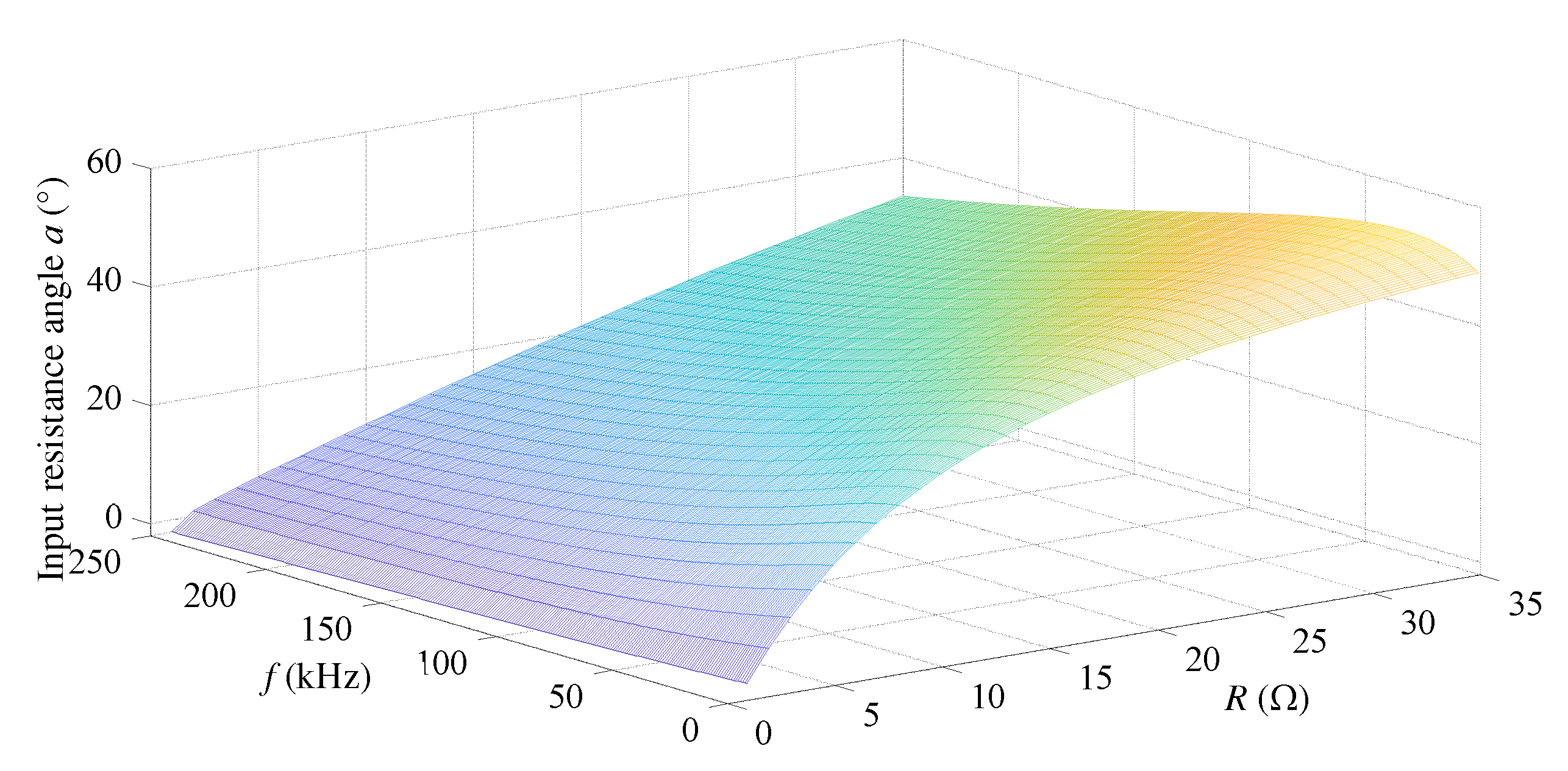
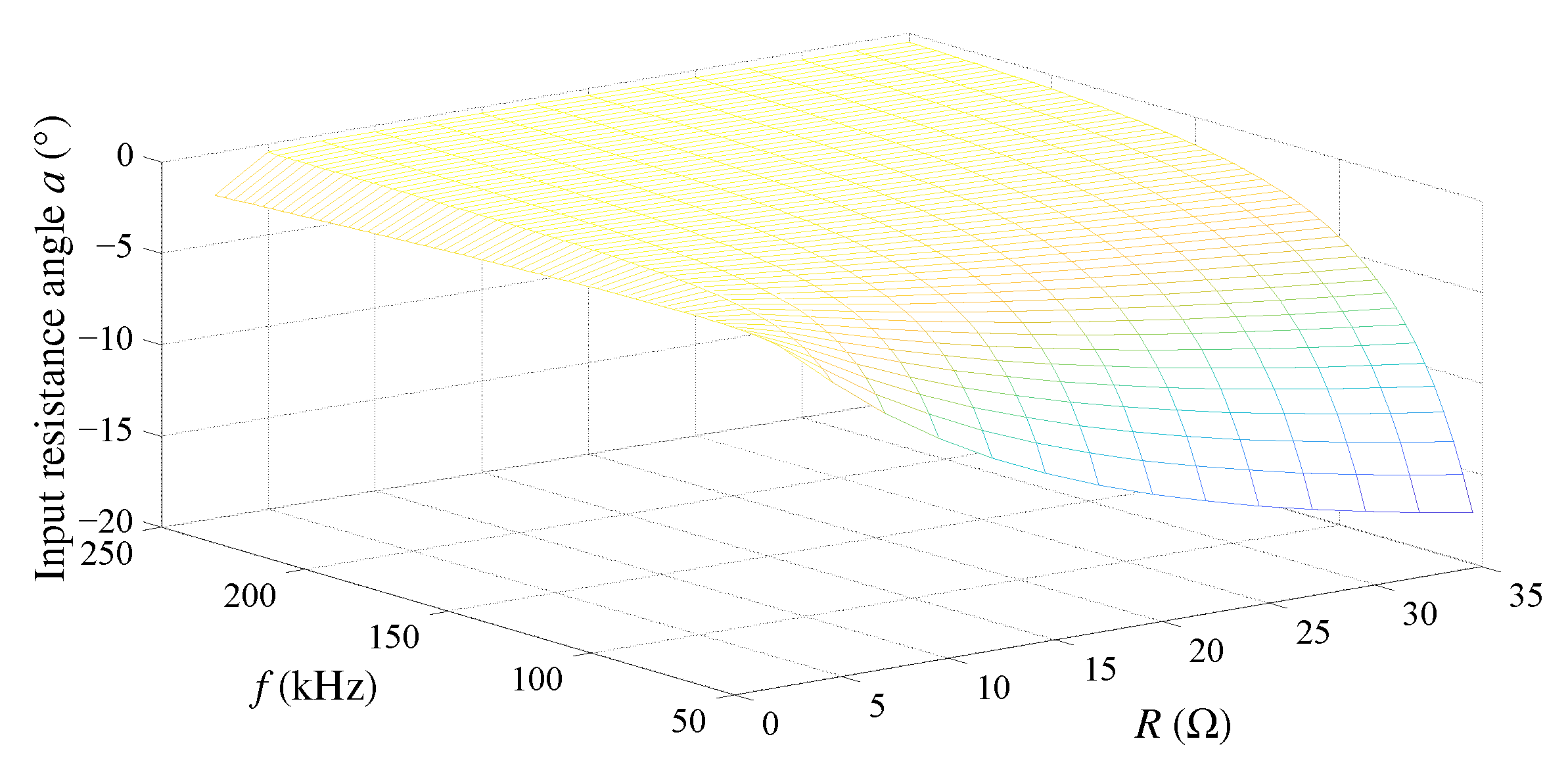
3.3. Analysis of the ZPA Characteristics of the Proposed WPT System
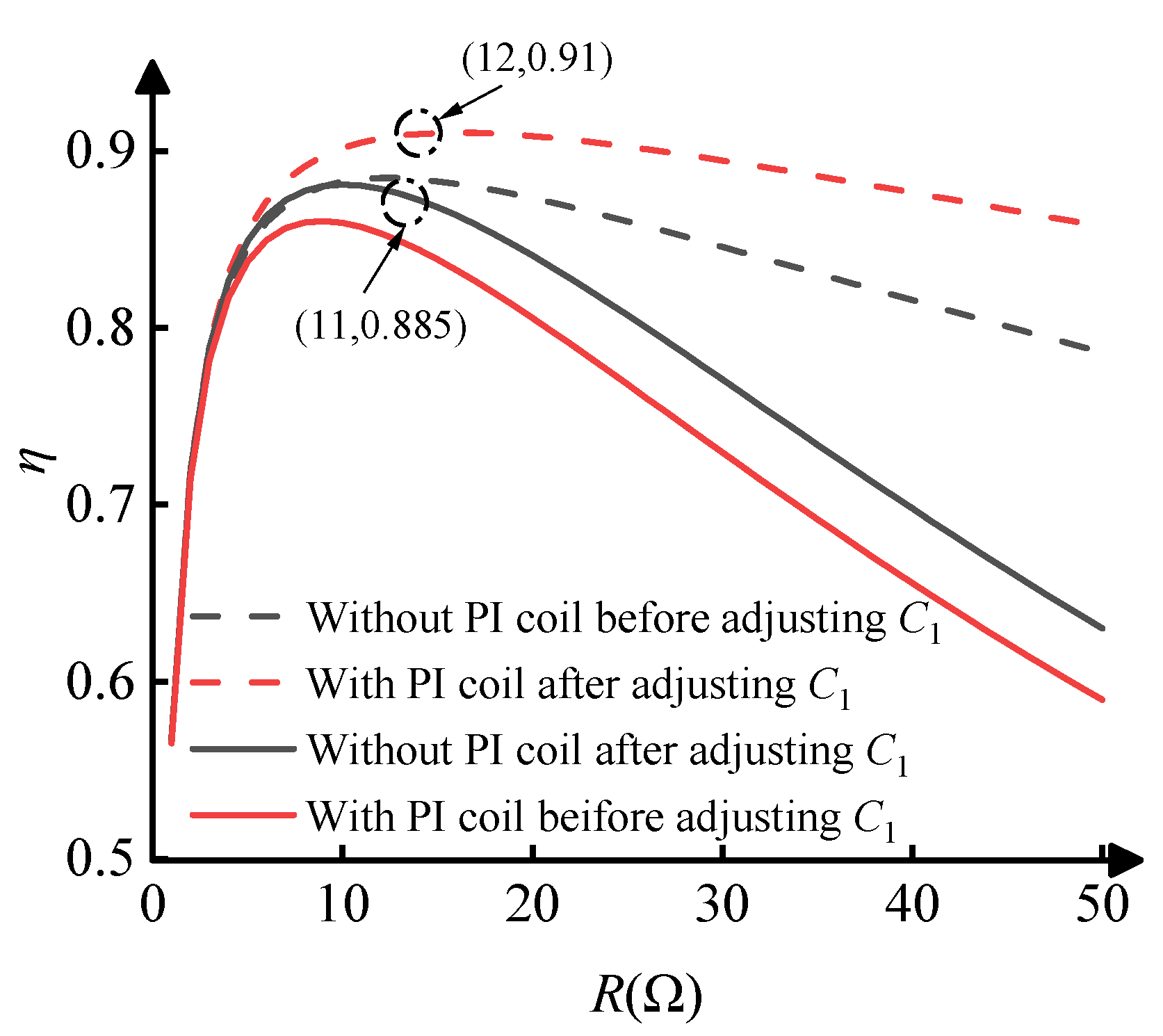
3.4. System Efficiency Analysis
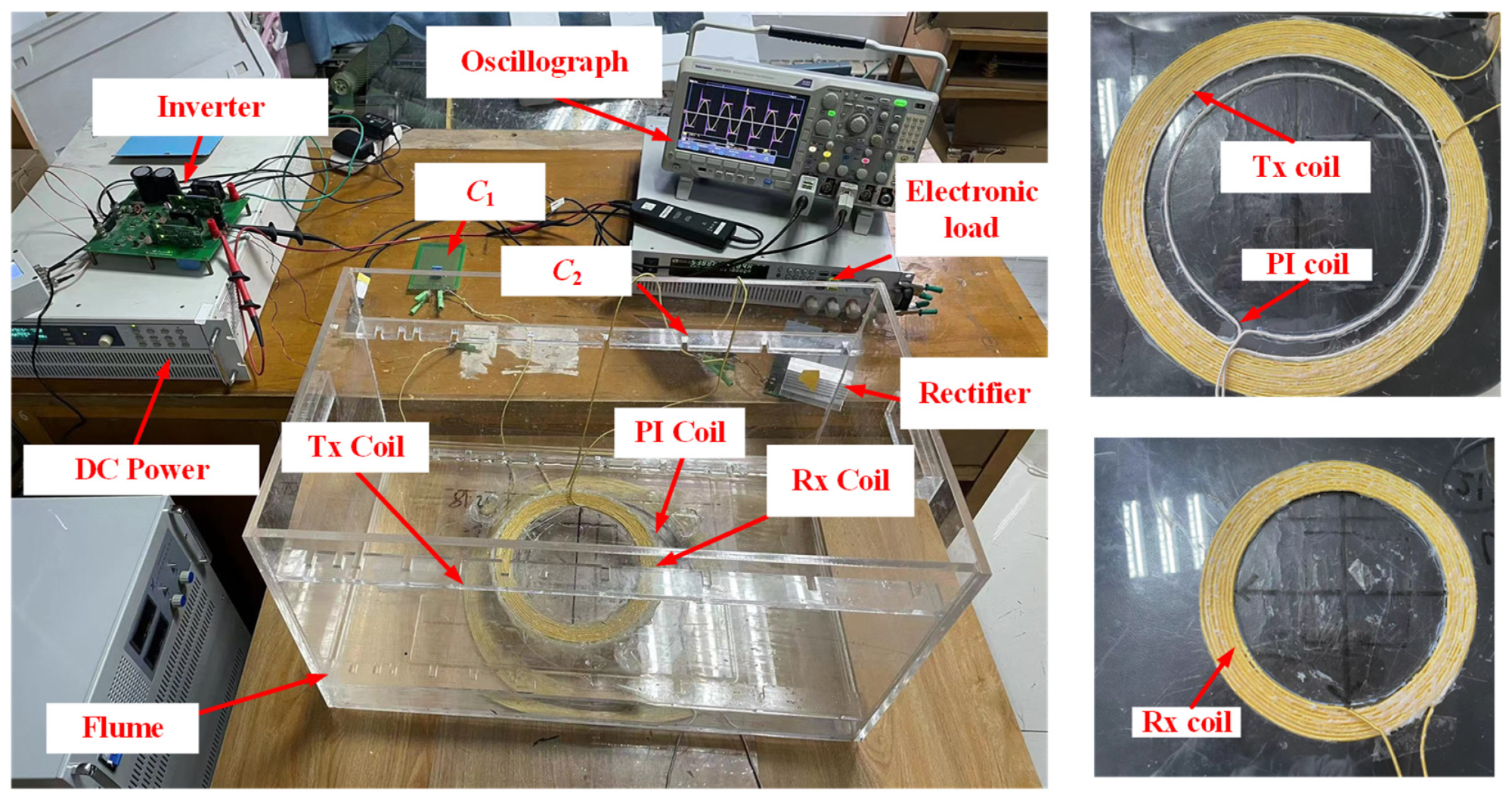
4. Experimental Verification
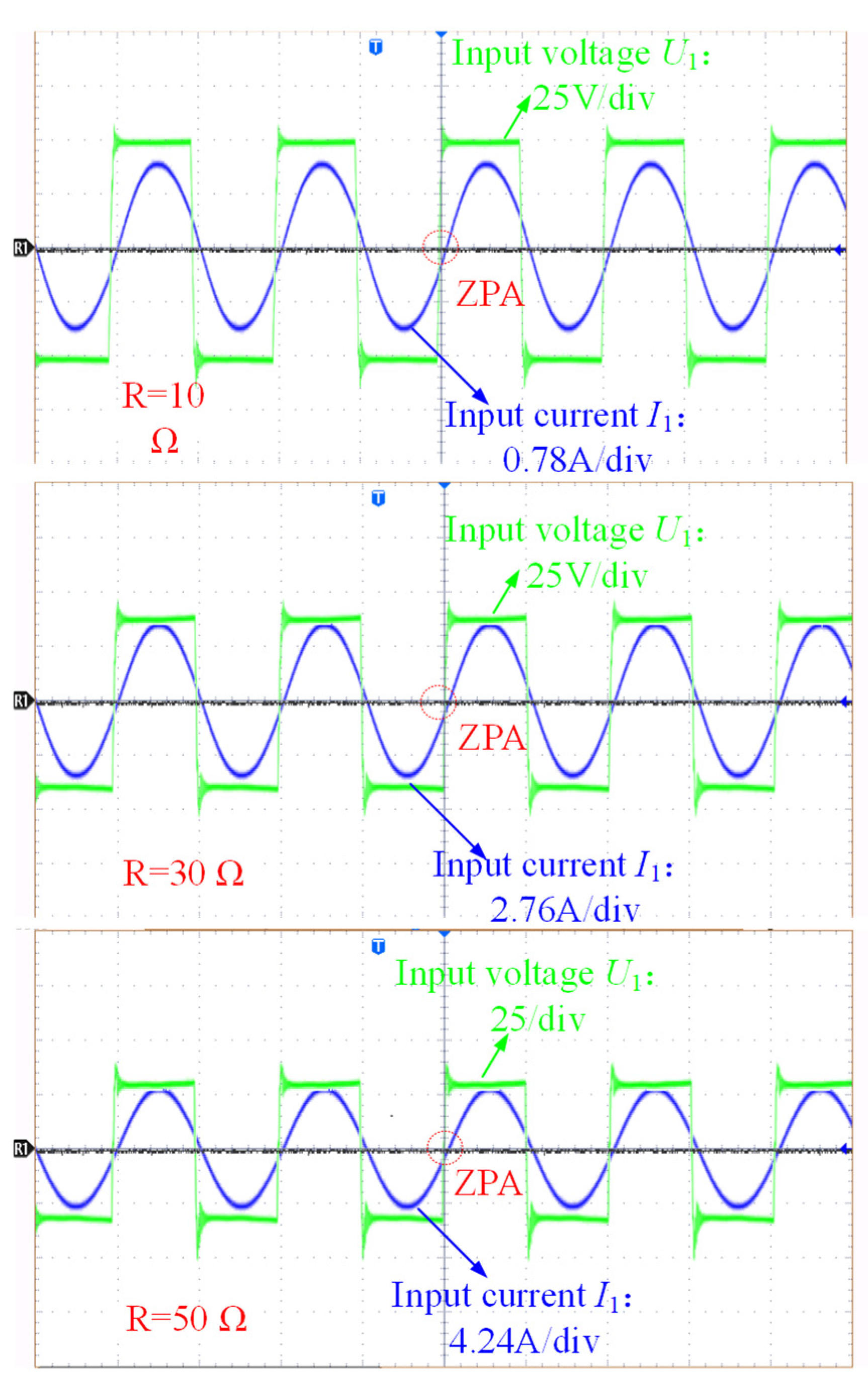
4.1. Verification of ZPA Characteristics of the Proposed WPT System
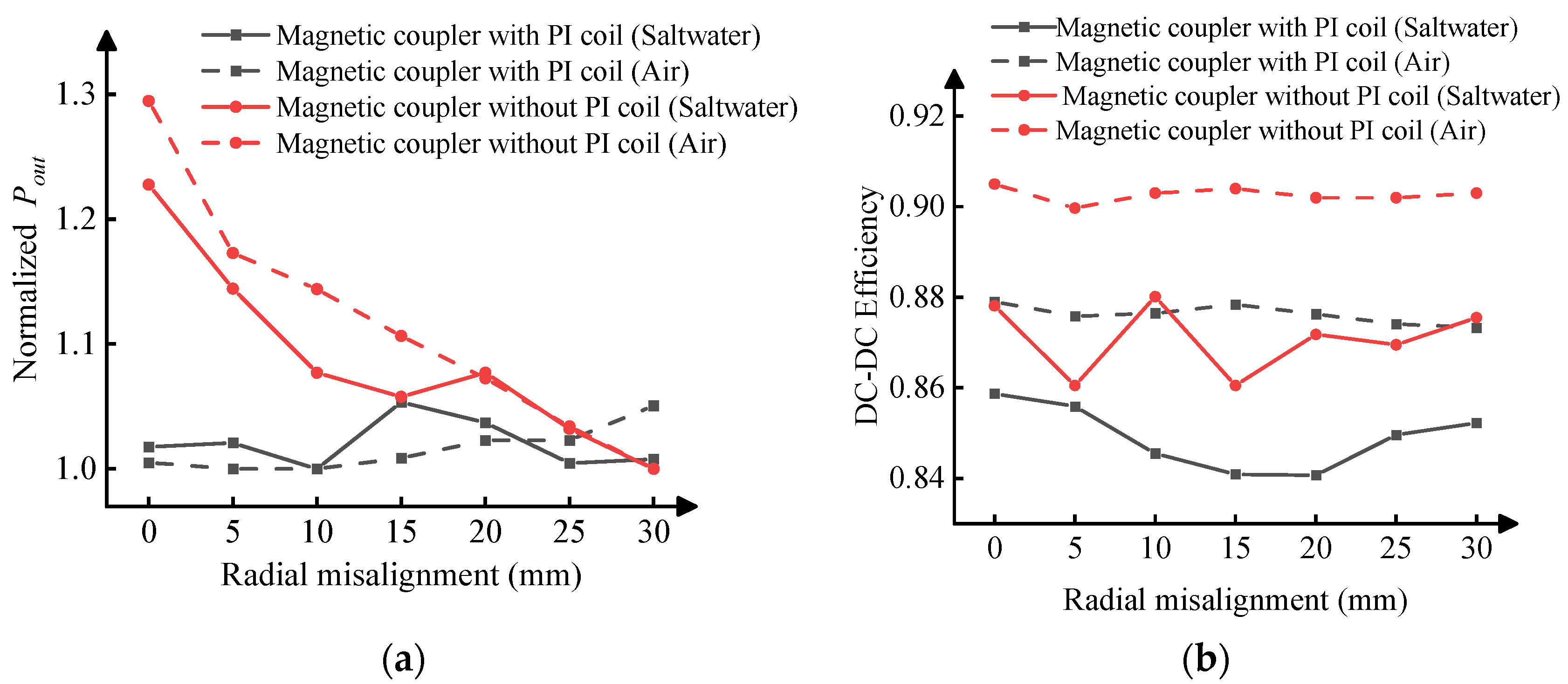
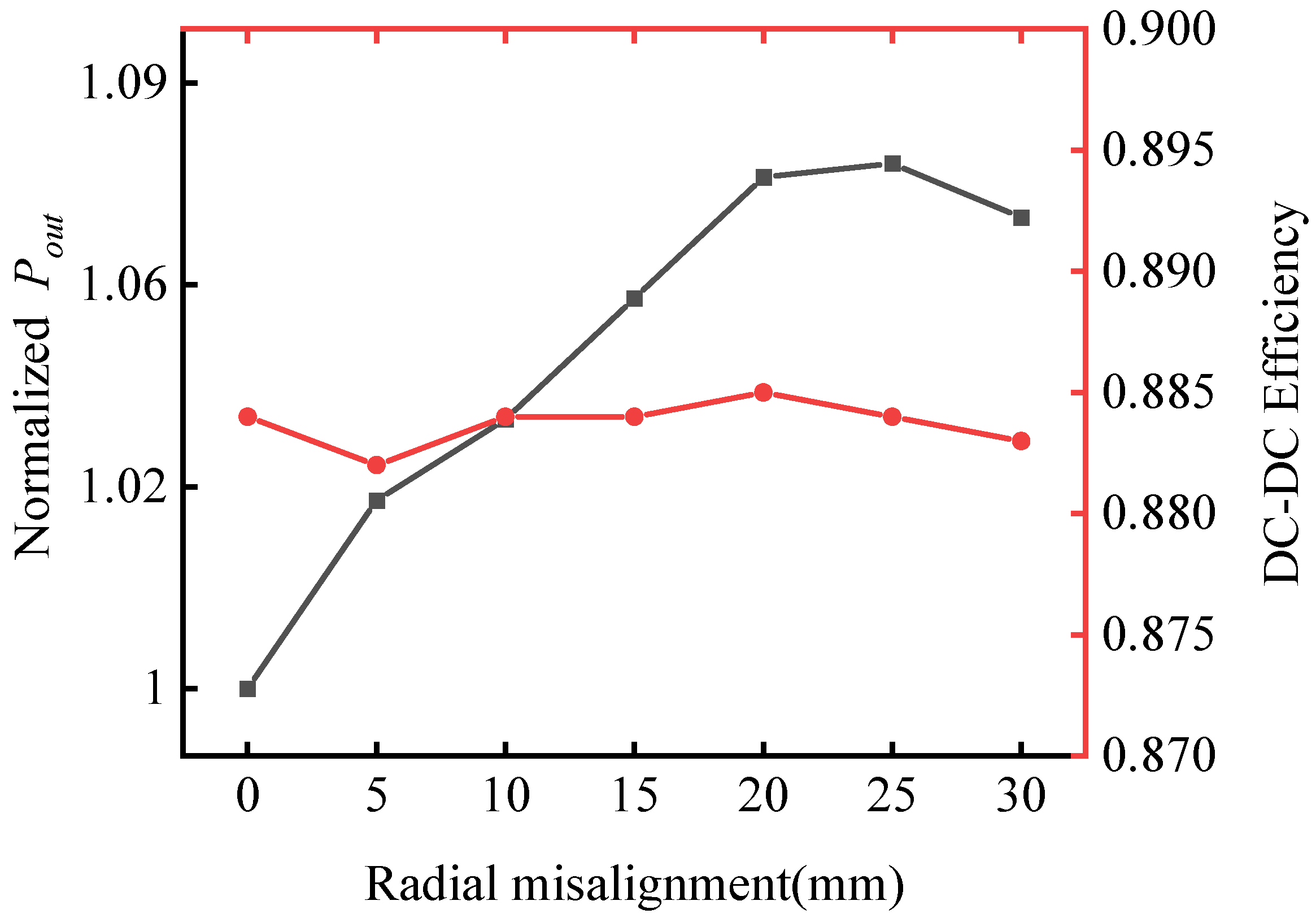
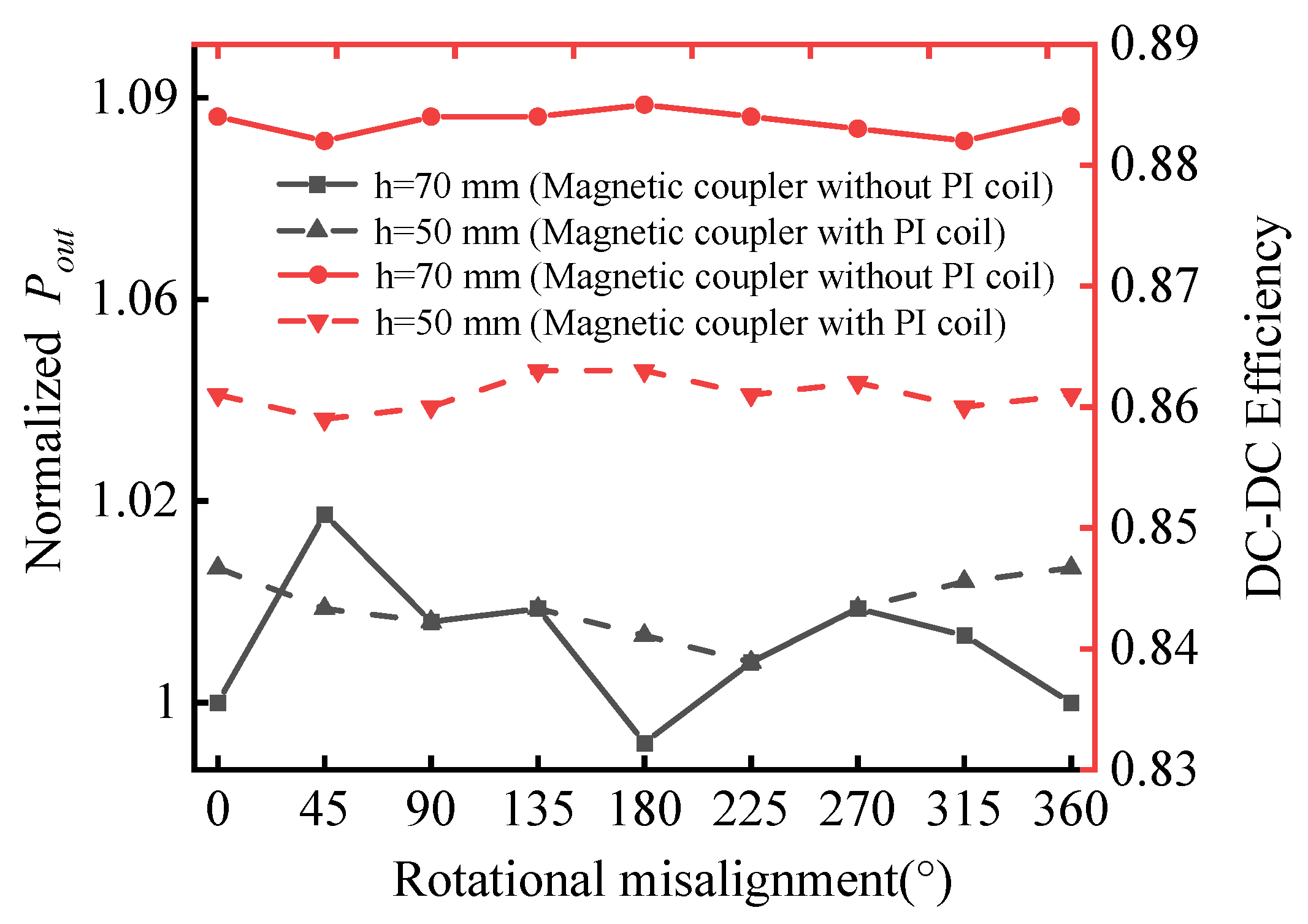
4.2. Verification of System Output Characteristics
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in High-Power Wireless Charging Systems: Overview and Design Considerations. IEEE Trans. Transp. Electrif. 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Harakare, A.; Barhate, N.; Randad, N.; Varghese, A.G.; Gupta, A.; Dave, P.; Modi, S.; Shrivastava, A.; Khare, L.; Raj, S. Design of Battery Management System for an Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022. [Google Scholar]
- Painter, H.; Flynn, J. Current and Future Wet-Mate Connector Technology Developments for Scientific Seabed Observatory Applications; Oceans: Boston, MA, USA, 2006; pp. 1–6. [Google Scholar]
- Mohsan, S.A.H.; Khan, M.A.; Mazinani, A.; Alsharif, M.H.; Cho, H.-S. Enabling Underwater Wireless Power Transfer towards Sixth Generation (6G) Wireless Networks: Opportunities, Recent Advances, and Technical Challenges. J. Mar. Sci. Eng. 2022, 10, 1282. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Y.; Song, B.; Zhang, K.; Kan, T.; Mi, C. An LCC-P Compensated Wireless Power Transfer System with a Constant Current Output and Reduced Receiver Size. Energies 2019, 12, 172. [Google Scholar] [CrossRef] [Green Version]
- Kan, T.; Mai, R.; Mercier, P.P.; Mi, C.C. Design and Analysis of a Three-Phase Wireless Charging System for Lightweight Autonomous Underwater Vehicles. IEEE Trans. Power Electron. 2018, 33, 6622–6632. [Google Scholar] [CrossRef]
- Wu, S.; Cai, C.; Chai, W.; Li, J.; Cui, Q.; Yang, S. Uniform Power IPT System With Quadruple-Coil Transmitter and Crossed Dipole Receiver for Autonomous Underwater Vehicles. IEEE Trans. Ind. Appl. 2022, 58, 1289–1297. [Google Scholar] [CrossRef]
- Zeng, Y.; Rong, C.; Lu, C.; Tao, X.; Liu, X.; Liu, R.; Liu, M. Misalignment Insensitive Wireless Power Transfer System Using a Hybrid Transmitter for Autonomous Underwater Vehicles. IEEE Trans. Ind. Appl. 2022, 58, 1298–1306. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Y.; Kan, T.; Lu, F.; Zhang, K.; Song, B.; Mi, C.C. Frequency Optimization of a Loosely Coupled Underwater Wireless Power Transfer System Considering Eddy Current Loss. IEEE Trans. Ind. Electron. 2019, 66, 3468–3476. [Google Scholar] [CrossRef]
- Liu, P.; Gao, T.; Zhao, R.; Mao, Z. A Novel Conformal Coil Structure Design of Wireless Power Transfer System for Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2022, 10, 875. [Google Scholar] [CrossRef]
- Wang, Y.; Song, B.; Mao, Z. Application of Shielding Coils in Underwater Wireless Power Transfer Systems. J. Mar. Sci. Eng. 2019, 7, 267. [Google Scholar] [CrossRef] [Green Version]
- Yan, Z.; Wu, M.; Zhao, C.; Hu, Q.; Zhu, L.; Qiao, L.; Wang, L. Free-Rotation Wireless Power Transfer System Based on Composite Anti-Misalignment Method for AUVs. IEEE Trans. Power Electron. 2023, 38, 4262–4266. [Google Scholar] [CrossRef]
- Yan, Z.; Zhao, C.; Hu, Q.; Wu, M.; Qiao, L.; Zhang, K.; Hu, Y. An Underwater Inductive Power Transfer System with a Compact Receiver and Reduced Eddy Current Loss. J. Mar. Sci. Eng. 2022, 10, 1900. [Google Scholar] [CrossRef]
- Wang, T.; Zhao, Q.; Yang, C. Visual navigation and docking for a planar type AUV docking and charging system. Ocean. Eng. 2021, 224, 108744. [Google Scholar] [CrossRef]
- Wang, S.; Hu, Z.; Rong, C.; Lu, C.; Chen, J.; Liu, M. Planar Multiple-Antiparallel Square Transmitter for Position-Insensitive Wireless Power Transfer. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 188–192. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Guo, Y.; Zhang, Y. Optimisation of planar rectangular coil achieving uniform magnetic field distribution for EV wireless charging based on genetic algorithm. IET Power Electron. 2019, 12, 2706–2712. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, W.; Xu, C.; Yang, J. Research on Uniform Magnetic Field Compensation Structure of Array Circular Coils for Wireless Power Transfer. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Xun, L.; Hui, S.Y. Optimal Design of a Hybrid Winding Structure for Planar Contactless Battery Charging Platform. IEEE Trans. Power Electron. 2008, 23, 455–463. [Google Scholar] [CrossRef]
- Bharadwaj, A.; Srivastava, V.K.; Sharma, A.; Reddy, C.C. A Switchable Multicoil Antenna With Booster Coil to Improve Coverage in WPT Systems. IEEE Trans. Antennas Propag. 2022, 70, 2490–2498. [Google Scholar] [CrossRef]
- Mirbozorgi, S.A.; Maghsoudloo, E.; Bahrami, H.; Sawan, M.; Gosselin, B. Multi-resonator arrays for smart wireless power distribution: Comparison with experimental assessment. IET Power Electron. 2020, 13, 4183–4193. [Google Scholar] [CrossRef]
- Pahlavan, S.; Shooshtari, M.; Jafarabadi Ashtiani, S. Star-Shaped Coils in the Transmitter Array for Receiver Rotation Tolerance in Free-Moving Wireless Power Transfer Applications. Energies 2022, 15, 8643. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Kong, S.; Kim, H.; Suh, I.S.; Suh, N.P.; Cho, D.H.; Kim, J.; Ahn, S. Coil Design and Shielding Methods for a Magnetic Resonant Wireless Power Transfer System. Proc. IEEE 2013, 101, 1332–1342. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.; Tse, C.; Chen, Q. Analysis and Comparison of Secondary Series- and Parallel-Compensated Inductive Power Transfer Systems Operating for Optimal Efficiency and Load-Independent Voltage-Transfer Ratio. IEEE Trans. Power Electron. 2014, 29, 2979–2990. [Google Scholar] [CrossRef]
- Yang, L.; Ren, L.; Shi, Y.; Wang, M.; Geng, Z. Analysis and Design of a S/S/P-Compensated Three-coil Structure WPT System With Constant Current and Constant Voltage Output. IEEE J. Emerg. Sel. Top. Power Electron. 2022. early access. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Park, S.-J.; Kim, D.-H. A Switching Hybrid LCC-S Compensation Topology for Constant Current/Voltage EV Wireless Charging. IEEE Access 2019, 7, 133924–133935. [Google Scholar] [CrossRef]
- Bana, V.; Kerber, M.; Anderson, G.; Rockway, J.D.; Phipps, A. In Underwater wireless power transfer for maritime applications. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | [15] | [17] | [8] | [19] | This Work |
|---|---|---|---|---|---|
| Magnetic coupler structure |  |  |  |  |  |
| Compact of magnetic coupler (volume) | ★★★★★ | ★★★☆☆ | ★★☆☆☆ | ★★☆☆☆ | ★★★★★ |
| Misalignment tolerance | ★★★☆☆ | ★★★★☆ | ★★★★★ | ★★★★☆ | ★★★★☆ |
| UMF construction effect | ★★★★☆ | ★★★★☆ | ★★★☆☆ | ★★★★★ | ★★★★☆ |
| Easy to construct | ★★☆☆☆ | ★★☆☆☆ | ★★☆☆☆ | ★☆☆☆☆ | ★★★★★ |
| Parameters | Definitions | Value |
|---|---|---|
| N | Tx coil turn number | 12 |
| a | Radius of Tx coil | 200 mm |
| N2 | Rx coil turn number | 8 |
| a1 | Radius of Rx coil | 100 mm |
| b | Outside radius of PI coil | 153 mm |
| c | Inner radius of PI coil | 130 mm |
| RS | Radius of single-turn wire | 1.95 mm |
| Parameters | Definitions | Value |
|---|---|---|
| L1 | Inductance of Tx coil | 94.38 μH |
| R1 | Resistance of Tx coil | 1105.1 mΩ |
| L2 | Inductance of PI coil | 1.68 μH |
| R2 | Resistance of PI coil | 124 mΩ |
| L3 | Inductance of Rx coil | 21.85 μH |
| R3 | Resistance of Rx coil | 303.99 mΩ |
| Lf1 | Inductance of compensating inductor | 8.93 μH |
| RLf1 | Resistance of compensating inductor | 155.49 mΩ |
| f | System frequency | 244 kHz |
| U1 | Input voltage | 100 V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, H.; Li, J.; Zhang, K.; Ye, J.; Yan, Z.; Song, B.; Tong, X. Enhancing Power Transmission Stability of AUV’s Wireless Power Transfer System with Compact Planar Magnetic Coupler. J. Mar. Sci. Eng. 2023, 11, 566. https://doi.org/10.3390/jmse11030566
Wen H, Li J, Zhang K, Ye J, Yan Z, Song B, Tong X. Enhancing Power Transmission Stability of AUV’s Wireless Power Transfer System with Compact Planar Magnetic Coupler. Journal of Marine Science and Engineering. 2023; 11(3):566. https://doi.org/10.3390/jmse11030566
Chicago/Turabian StyleWen, Haibing, Jiayuan Li, Kehan Zhang, Jinying Ye, Zhengchao Yan, Baowei Song, and Xiangqian Tong. 2023. "Enhancing Power Transmission Stability of AUV’s Wireless Power Transfer System with Compact Planar Magnetic Coupler" Journal of Marine Science and Engineering 11, no. 3: 566. https://doi.org/10.3390/jmse11030566