

Experimental Study on the Flow Field, Force, and Moment Measurements of Submarines with Different Stern Control Surfaces
Abstract
:1. Introduction
2. Cross-Rudder and X-Rudder Submarine Flow Field Test Verification
2.1. Test Object
2.2. Coordinate System
2.3. Test Description
- (1)
- Resistance measurement
- (2)
- Lateral steering force and yaw moment measurement
- (3)
- Velocity field measurement in the propeller plane
2.4. Test Environment
2.5. Test Equipment
PIV Speed Measurement Principle
2.6. Technical Scheme of the Test
2.6.1. Resistance Test Method
- (1)
- In order to obtain resistance and lateral steering force data with a high degree of accuracy, it is necessary to ensure that the water surface is sufficiently calm for each test to prevent waves, etc., from affecting the balance measurements. At the same time, there should be sufficient time between the two tests to ensure that the bottom of the pool was not disturbed.
- (2)
- Before each test, a low-speed sailing measurement is carried out first, which is used to save the time while waiting for the water to be calm after changing the working conditions.
- (3)
- During each test, the data collected by the balance are transmitted to the computer, and the corresponding force, moment, and other measured parameters are processed by the corresponding software, and the data are recorded.
2.6.2. Wake Field Test Method
- (1)
- To obtain a high-quality 3D flow field vector distribution, the water quality in the towing tank must be tested beforehand to avoid the presence of impurities in the water that may affect the PIV measurement results.
- (2)
- Calibration of the PIV system is performed before the test to determine the coordinates of the spatial position of the measured cross-section. Two CCD cameras are used to capture images of the calibration plate at different angles, and a spatial coordinate system is established according to the location of the dots on the acquired images.
- (3)
- To ensure that the particle motion represents the actual flow in the flow field, there are certain requirements on the diameter size, density, shape, light scattering performance, seeding uniformity, and concentration of the tracer particles. The particles must follow the water flow well to obtain high-quality particle images; thus, the selection and seeding of the tracer particles are key to capturing high-quality flow field images. It is not possible to obtain a tracer particle suspension which meets the experimental requirements by relying only on gravity. To this end, a custom-made particle spreading device was developed in the ship model pool laboratory. In the tank, the tracer particles are suspended under high pressure and released into the pool using eight spray nozzles to achieve a highly uniform particle distribution.
- (4)
- After the particle distribution images have been recorded, the PIV essentially becomes an image processing technique. After camera calibration, filtering, and other pre-processing, the particle displacement on the image plane is determined via a particle matching algorithm, and then the velocity vector distribution of particle motion is obtained. After rejecting any mismatching vectors, the final data are obtained and displayed, and, if necessary, interpolation algorithms can be employed to generate a denser velocity vector distribution.
3. Test Results
3.1. Resistance Test
3.2. Lateral Steering Force and Yaw Moment
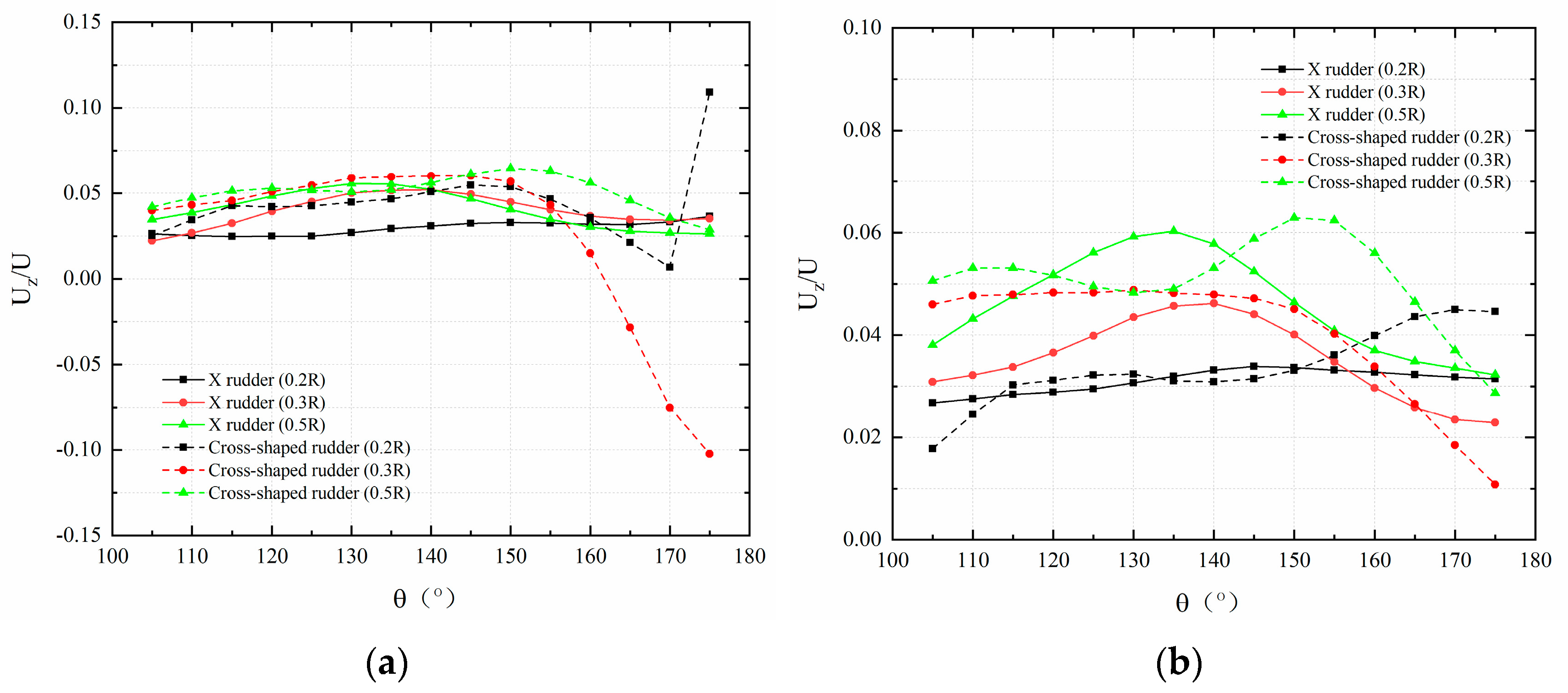
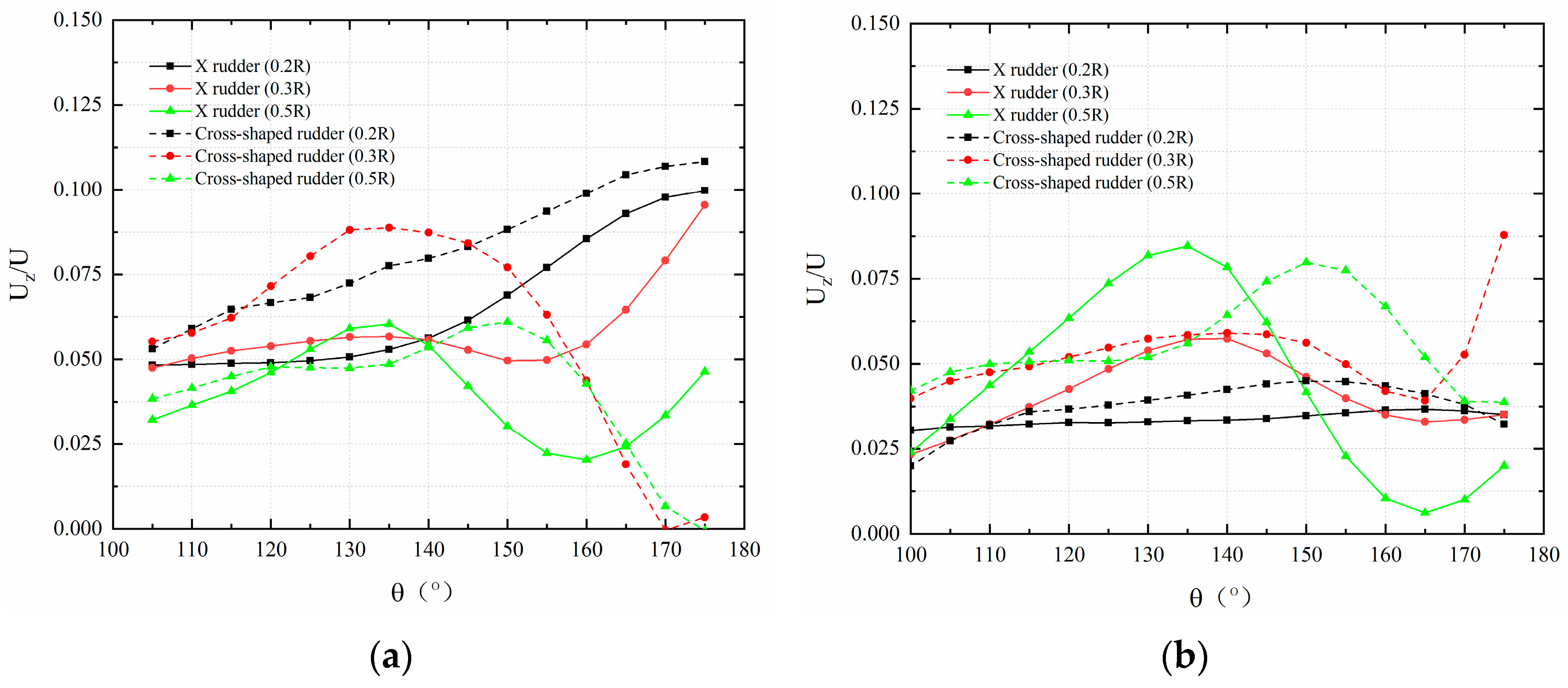
3.3. Stern Flow Field Distribution
4. Conclusions
- (1)
- Under the same rudder angle, the resistance of the X-rudder submarine was smaller than that of the cross rudder one at low speed, while at high speed, the resistance of the cross-rudder submarine was smaller than that of the X-rudder submarine.
- (2)
- Whether under low or high speed, the lateral steering force and yaw moment of the X-rudder were larger than those of the cross rudder under the same rudder angle. With increasing rudder angle, the improvement in maneuverability provided by the X-rudder became more apparent. At a rudder angle of 10°, the lateral steering force and yaw moment of the X-rudder were larger than those of the cross rudder, and the yaw moment of the X-rudder was about two times larger than that of the cross rudder.
- (3)
- With increasing rudder angle, the velocity inhomogeneity coefficient at the submarine propeller plane of the X-rudder SCS exhibited a trend of first decreasing and then increasing. In the small-radius region of the propeller plane (i.e., r/R = 0.2), the inhomogeneity coefficient of the X-rudder was generally smaller than that of the cross rudder. Finally, the inhomogeneity of the flow field in the small-radius region of the X-rudder propeller plane was significantly better than that of the cross rudder when operating at rudder angles of 2° and 5°.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Lu, K.M.; Yu, G.P.; Zhang, Z. Current status and development direction of foreign submarine acoustic stealth technology. Ship Electron. Eng. 2010, 30, 1–4. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, W.; Guo, H. Numerical simulation of propeller wake vortex–rudder interaction in oblique flows. Ships Offshore Struct. 2021, 16, 144–155. [Google Scholar] [CrossRef]
- Rao, Z.; Yang, C. Numerical prediction of effective wake field for a submarine based on a hybrid approach and an RBF interpolation. J. Hydrodyn. 2017, 29, 691–701. [Google Scholar] [CrossRef]
- Yoo, W.J.; Yoo, B.Y.; Rhee, K.P. An experimental study on the maneuvering characteristics of a twin propeller/twin rudder ship during berthing and unberthing. Ships Offshore Struct. 2006, 1, 191–198. [Google Scholar] [CrossRef]
- Cao, Z.J. Research on Hydrodynamic Performance of Submarine X Rudder; Naval University of Engineering: Wuhan, China, 2019. [Google Scholar]
- Wang, S.Y. A small discussion on submarine X rudder. Ship Mater. Mark. 1999, 2, 36–37. [Google Scholar]
- O’Rourke, R. Navy Columbia (SSBN-826) Class Ballistic Missile Submarine Program: Background and Issues for Congress; Congressional Research Service: Washington, DC, USA, 2019. [Google Scholar]
- Mackay, M. Wind Tunnel Experiments with a Submarine Afterbody Model; Technical Memorandum DRDC Atlantic TM 2002-194; Defence R&D Canada-Atlantic: Dartmouth, NS, Canada, 2003. [Google Scholar]
- Broglia, R.; Dubbioso, G.; Zaghi, S. Analysis of a Submarine Manoeuvrability by Numerical PMM Tests. In Proceedings of the European Conference on Undersea Defence Technology (UDT2014), Liverpool, UK, 10–12 June 2014. [Google Scholar]
- Broglia, R.; Dubbioso, G.; Durante, D. Simulation of turning circle by CFD: Analysis of different propeller models and their effect on manoeuvring prediction. Appl. Ocean. Res. 2013, 39, 1–10. [Google Scholar] [CrossRef]
- Zaghi, S.; Dubbioso, G.; Broglia, R. Virtual PMM and Free Running Maneuvering Predictions of a Submarine by CFD. In Proceedings of the NAV 2015 18th International Conference on Ships and Shipping Research, Lecco, Italy, 24–26 June 2015. [Google Scholar]
- Zaghi, S.; Dubbioso, G.; Broglia, R. CFD analysis of turning abilities of a submarine model. Ocean. Eng. 2017, 129, 459–479. [Google Scholar]
- Suastika, K.; Virliani, P.; Wasis, D.A. Submarine rudder stern-plane configuration for optimum manoeuvring. EDP Sci. 2018, 177, 01024. [Google Scholar] [CrossRef]
- Feng, D.S. Overview of the Development of X-Rudder for Submarines and a Brief Description of the Research Application of X-Rudder in Sweden; National Defense Industry Press: Beijing, China, 1991. [Google Scholar]
- Shi, S.D. Maneuverability of Submarines; Defense Industry Press: Beijing, China, 1995. [Google Scholar]
- Zhang, T.; Lin, J.X. Study on the equivalent rudder angle of X-shaped rudder and cross-shaped rudder of submarine. Ship Sea Eng. 2004. [Google Scholar] [CrossRef]
- Luan, H.C.; Lin, J.X. Study on the relationship between maneuvering and motion of X-rudder submarine. Ship Sea Eng. 2007, 100–103. [Google Scholar] [CrossRef]
- Zhao, J.H.; Wang, B.Q.; Hou, D.Y. Research on the design method of stabilized wing for large depth submersible. Ship Mech. 2008, 12, 89–99. [Google Scholar]
- Hu, K.; Zong, F.Y.; Pang, X.N. Research on the design of equivalent rudder angle conversion device for X-rudder submarines. Ship Sea Eng. 2003, 19–21. [Google Scholar]
- Hu, K.; Pang, X.N. Design and simulation analysis of an equivalent rudder angle conversion device for X-rudder submarines. Ship Sea Eng. 2005, 47–50. [Google Scholar]
- Hu, K.; Xu, Y.F.; Wang, S.Z. Overview of submarine X-rudder development and analysis of its maneuvering control characteristics. China Shipbuild. 2007, 48, 130–136. [Google Scholar]
- Hu, K.; Wang, S.Z. Research on the design of underwater navigation body X-type orthogonal rudder control parameters. Mar. Eng. 2008, 37, 127–131. [Google Scholar]
- Zhang, L.; Xiao, C.R.; Jiao, Y.C. Numerical comparison of the hydrodynamic performance of cross-rudder and X-rudder submarines. Nav. Sci. Technol. 2017. [Google Scholar] [CrossRef]
- Jiao, Y.C.; Xiao, C.R. Layout optimization of submarine X rudder. J. Arms Equip. Eng. 2018. [Google Scholar] [CrossRef]
- Chen, J.J.; Pan, Z.Y.; Peng, C. Comparison of hydrodynamic characteristics of cross-shaped and X-shaped stern rudder navigating bodies. Chin. Nav. Res. 2020, 15, 10–18. [Google Scholar]
- Zhang, Y.; Li, Y.; Sun, Y. Design and simulation of X-rudder AUV’s motion control. Ocean. Eng. 2017, 137, 204–214. [Google Scholar] [CrossRef]
- Jeon, M.; Yoon, H.K.; Park, J. Analysis of maneuverability of X-rudder submarine considering environmental disturbance and jamming situations. Appl. Ocean. Res. 2022, 121, 103079. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Huang, Z. Adaptive energy-efficient tracking control of a X rudder AUV with actuator dynamics and rolling restriction. Appl. Ocean. Res. 2022, 118, 102994. [Google Scholar] [CrossRef]
- Wang, W.; Xia, Y.; Chen, Y. Motion control methods for X-rudder underwater vehicles: Model based sliding Mode and non-model based iterative sliding mode. Ocean. Eng. 2020, 216, 108054. [Google Scholar] [CrossRef]
- Felli, M.; Falchi, M. Propeller tip and hub vortex dynamics in the interaction with a rudder. Exp. Fluids 2011, 51, 1385–1402. [Google Scholar] [CrossRef]
- Cozijn, J.L.; Hallmann, R. Thruster-Interaction Effects on a DP Shuttle Tanker-Wake Flow Measurements of the Main Propeller and Bow Tunnel Thrusters. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering. American Society of Mechanical Engineers 2014, San Francisco, CA, USA, 8–13 June 2014; Volume 45387, p. V01BT01A011. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Height of the SCSs | 0.065 L |
| The average span of the SCSs | 0.071 L |
| The average span of the cross rudder stabilizer | 0.037 L |
| The average span of the cross rudder flap | 0.034 L |
| The diameter at the longitudinal location of the SCSs | 0.059 L |
| The diameter of the submarine at the propeller hub | 0.048 L |
| The distance of the X-rudder from the bow to its axis of rotation | 0.91 L |
| Speed | Reynolds Number | Rudder Angle | Resistance (Non-Dimensional) | ||
|---|---|---|---|---|---|
| Cross Rudder (Rcross) | X-Rudder (Rx) | Relative Increment (Rx − Rcross)/Rcross | |||
| Vlow | 1.34 × 106 | 0° | 108.69% | 91.4% | −15.90% |
| 2° | 116.72% | 96.0% | −17.76% | ||
| 5° | 134.61% | 107.45% | −20.18% | ||
| 10° | 146.1% | 111.62% | −23.6% | ||
| Vhigh | 3.6 × 106 | 0° | 91.9% | 97.9% | 6.53% |
| 2° | 87.5% | 93.84% | 7.24% | ||
| 5° | 91.05% | 100.31% | 10.17% | ||
| 10° | 91.3% | 100.87% | 10.49% | ||
| Speed | Reynolds Number | Rudder Angle | Lateral Steering Forces (Non-Dimensional) | ||
|---|---|---|---|---|---|
| Cross Rudder (Fcross) | X-Rudder (Fx) | Relative Increment (Fx − Fcross)/Fcross | |||
| Vlow | 1.34 × 106 | 0° | 0 | 0 | 0 |
| 2° | 100% | 197.98% | 97.98% | ||
| 5° | 131.97% | 354.56% | 168.66% | ||
| 10° | 179.85% | 601.72% | 234.58% | ||
| Vhigh | 3.6 × 106 | 0° | 0 | 0 | 0 |
| 2° | 93.97% | 147.55% | 57.03% | ||
| 5° | 126.18% | 207.07% | 64.10% | ||
| 10° | 206.55% | 593.3% | 187.25% | ||
| Speed | Rudder Angle | Yaw Moment | ||
|---|---|---|---|---|
| Cross Rudder (Mcross) | X-Rudder (Mx) | Relative Increment (Mx − Mcross)/Mcross | ||
| Vlow | 0° | 0 | 0 | 0 |
| 2° | 100% | 202.74% | 102.74% | |
| 5° | 132% | 363.08% | 175.06% | |
| 10° | 179.87% | 616.19% | 242.57% | |
| Vhigh | 0° | 0 | 0 | 0 |
| 2° | 654.29% | 1051.91% | 60.77% | |
| 5° | 878.61% | 1476.28% | 68.02% | |
| 10° | 1438.16% | 4229.75% | 194.11% | |
| Rudder Angle | Speed | r/R | ) | ) | |
|---|---|---|---|---|---|
| 0° | Vlow | 0.2 | 0.044086 | 0.137829 | 212.64% |
| 0.3 | 0.03387 | 0.121575 | 258.94% | ||
| 0.5 | 0.02447 | 0.067234 | 174.77% | ||
| Vhigh | 0.2 | 0.049227 | 0.072478 | 47.23% | |
| 0.3 | 0.066838 | 0.035276 | −47.22% | ||
| 0.5 | 0.026342 | 0.080717 | 206.42% |
| Rudder Angle | Speed | r/R | ) | ) | |
|---|---|---|---|---|---|
| 2° | Vlow | 0.2 | 0.100687 | 0.039124 | −61.14% |
| 0.3 | 0.101815 | 0.066569 | −34.62% | ||
| 0.5 | 0.021518 | 0.05532 | 157.09% | ||
| Vhigh | 0.2 | 0.052986 | 0.029434 | −44.45% | |
| 0.3 | 0.067865 | 0.07263 | 7.02% | ||
| 0.5 | 0.043217 | 0.07306 | 69.06% |
| Rudder Angle | Speed | r/R | ) | ) | |
|---|---|---|---|---|---|
| 5° | Vlow | 0.2 | 0.045356 | 0.015313 | −66.24% |
| 0.3 | 0.083141 | 0.088512 | 6.46% | ||
| 0.5 | 0.030079 | 0.094571 | 214.41% | ||
| Vhigh | 0.2 | 0.052224 | 0.022227 | −57.44% | |
| 0.3 | 0.070555 | 0.038828 | −44.97% | ||
| 0.5 | 0.039622 | 0.059555 | 50.31% |
| Rudder Angle | Speed | r/R | ) | ) | |
|---|---|---|---|---|---|
| 10° | Vlow | 0.2 | 0.113919 | 0.042532 | −62.66% |
| 0.3 | 0.050626 | 0.080097 | 58.21% | ||
| 0.5 | 0.038847 | 0.096596 | 148.66% | ||
| Vhigh | 0.2 | 0.084526 | 0.018341 | −78.30% | |
| 0.3 | 0.085513 | 0.097001 | 13.43% | ||
| 0.5 | 0.063663 | 0.174736 | 174.47% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, L.; Ye, J.; Liang, Q. Experimental Study on the Flow Field, Force, and Moment Measurements of Submarines with Different Stern Control Surfaces. J. Mar. Sci. Eng. 2023, 11, 2091. https://doi.org/10.3390/jmse11112091
Ke L, Ye J, Liang Q. Experimental Study on the Flow Field, Force, and Moment Measurements of Submarines with Different Stern Control Surfaces. Journal of Marine Science and Engineering. 2023; 11(11):2091. https://doi.org/10.3390/jmse11112091
Chicago/Turabian StyleKe, Lin, Jinming Ye, and Qiufeng Liang. 2023. "Experimental Study on the Flow Field, Force, and Moment Measurements of Submarines with Different Stern Control Surfaces" Journal of Marine Science and Engineering 11, no. 11: 2091. https://doi.org/10.3390/jmse11112091