
Analysis of the Descent Process and Multi-Objective Optimization Design of a Benthic Lander


Abstract
:1. Introduction
2. Model Establishment of the Benthic Lander
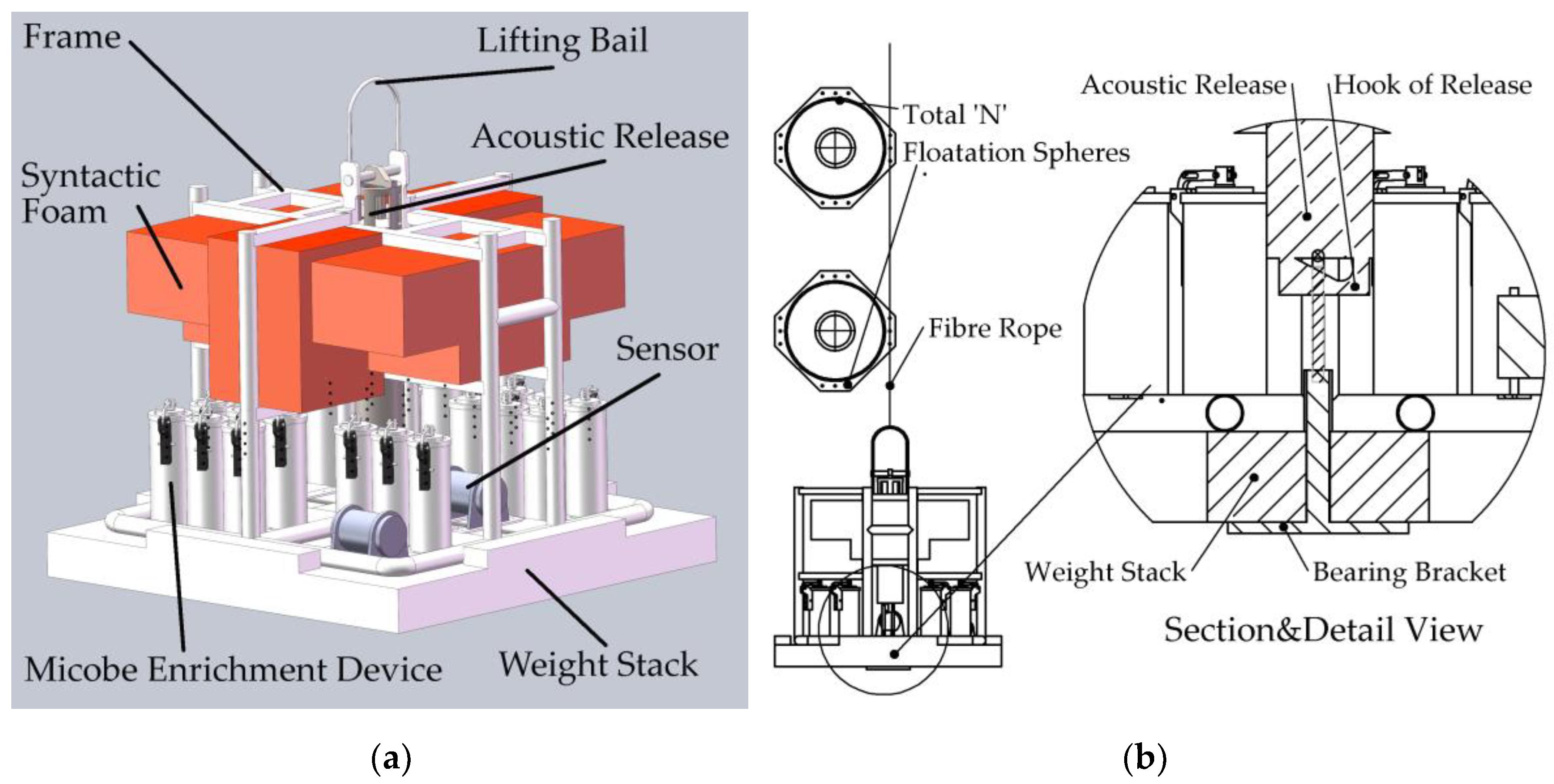
2.1. Frame Structure and Working Principle of the Benthic Lander
2.2. Benthic Lander Dynamic Modeling
3. Calculating Hydrodynamic Coefficients
3.1. Hydrodynamic Modeling
3.2. Calculation of Damping Force Coefficients
3.3. Calculation of Added Mass Coefficients
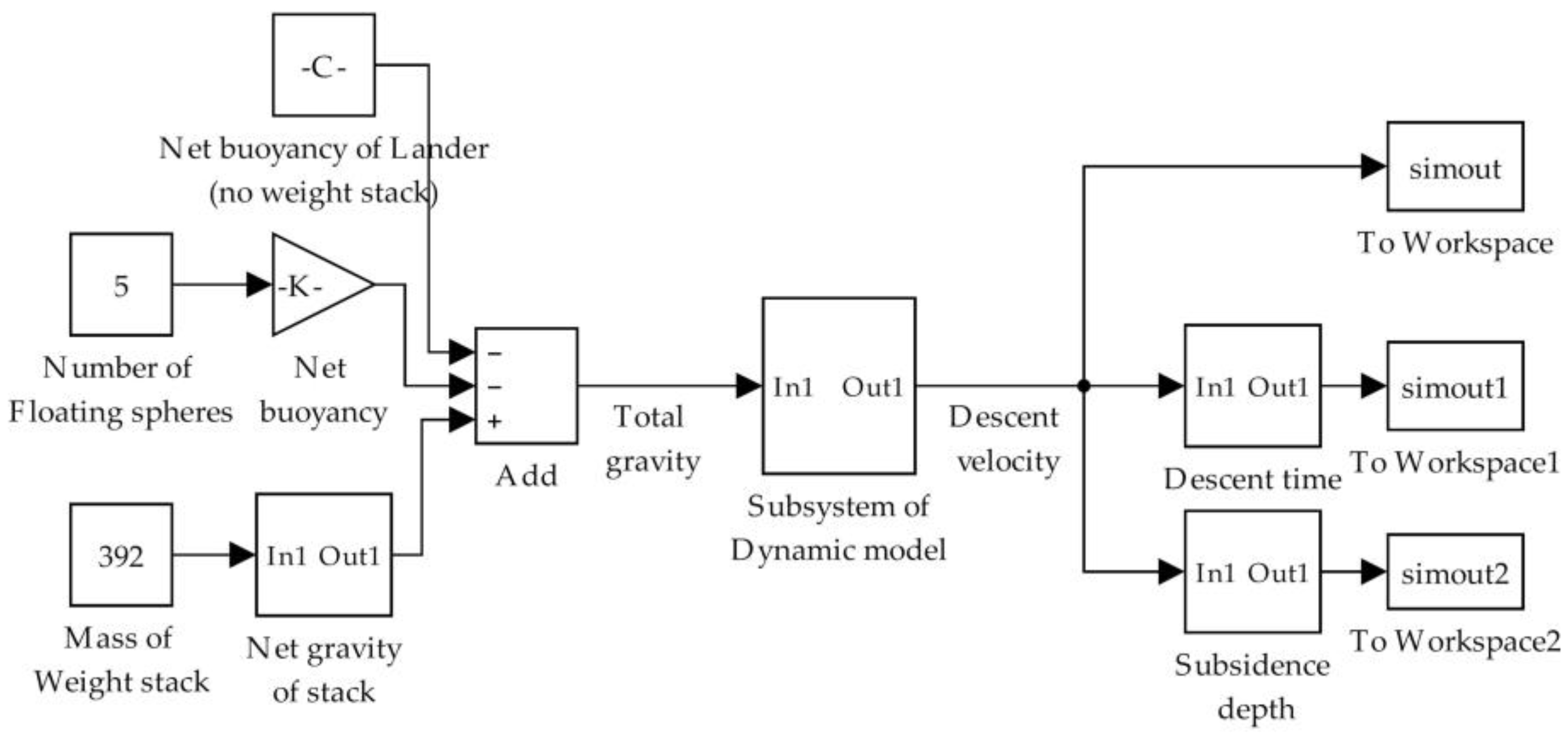
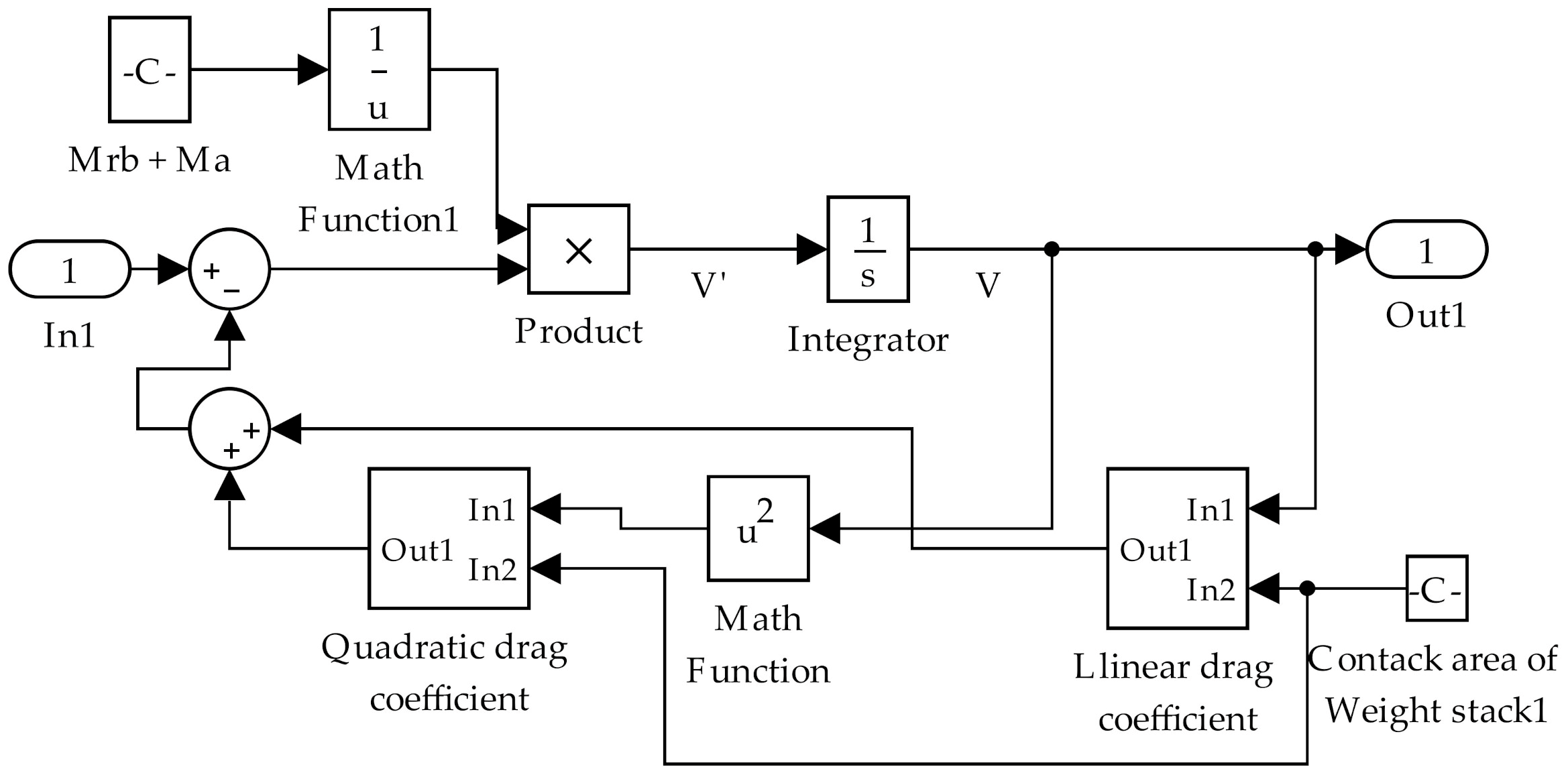
4. MATLAB Simulink
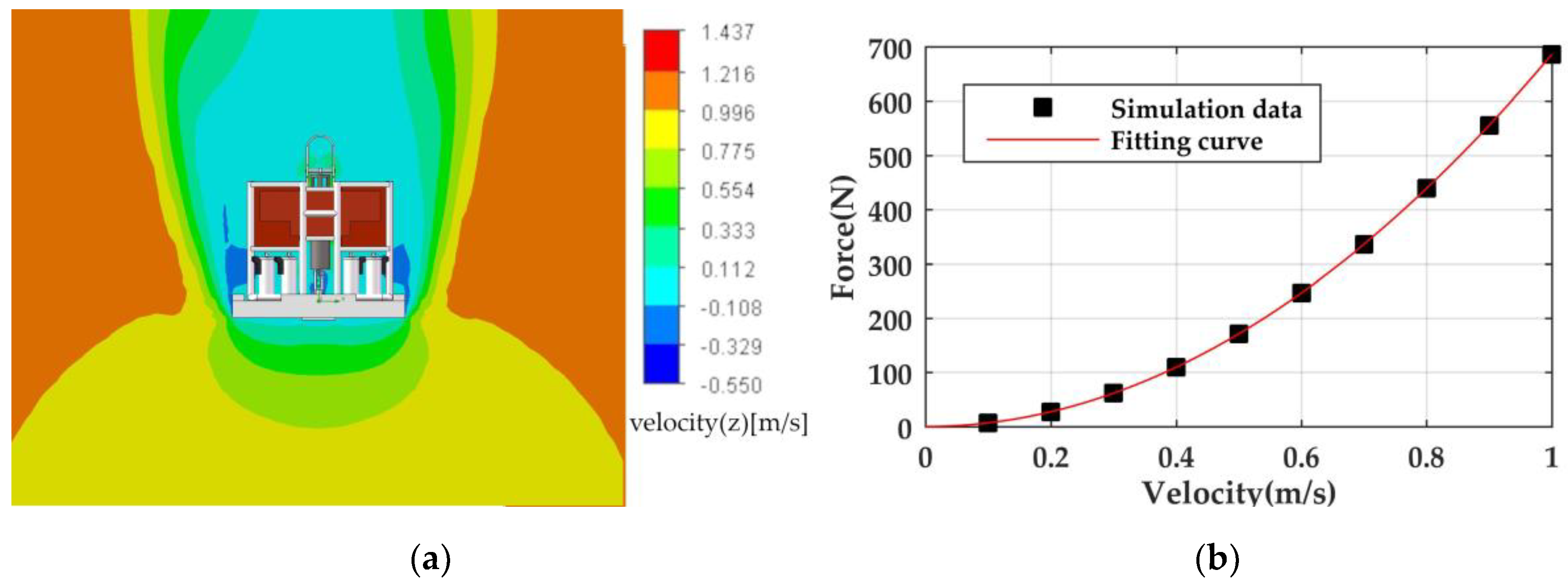
- influences the hydrodynamic coefficients (as we can see from Figure A5): The corresponding function relationship is calculated by using SOLIDWORKS Flow Simulation. The results are shown in Equations (9) and (10);
- takes the water depth of 5133 m during the sea trial as the background: The corresponding function is shown in Equation (11);
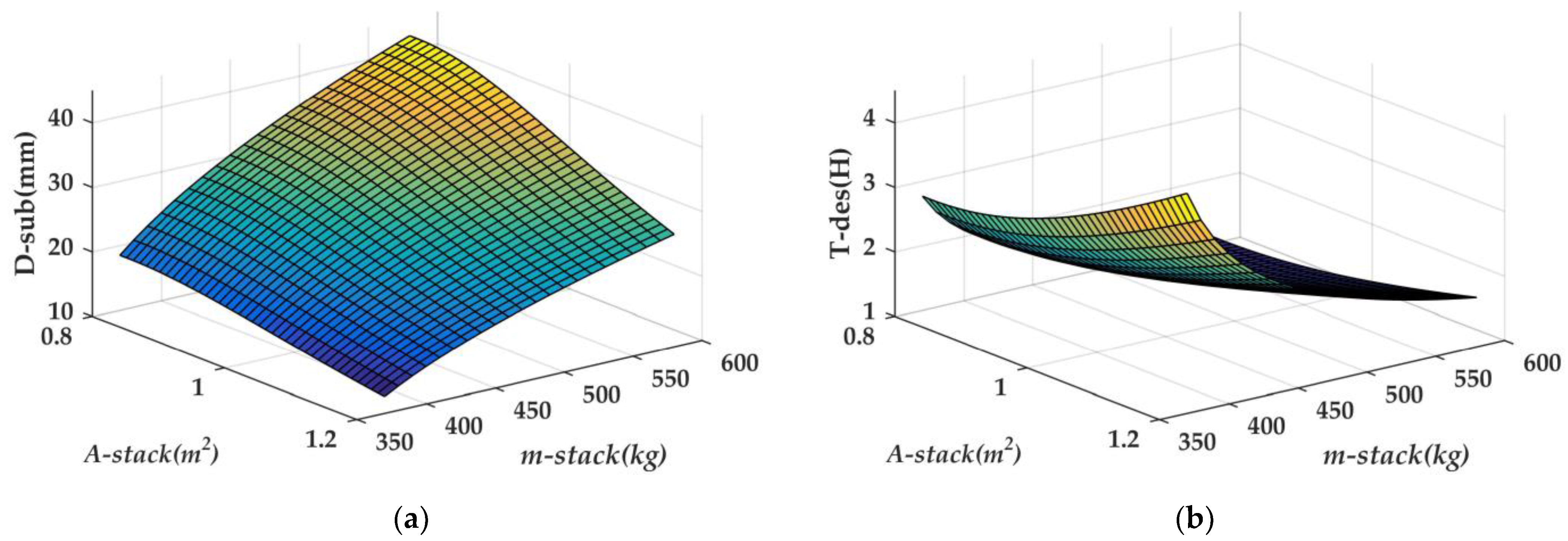
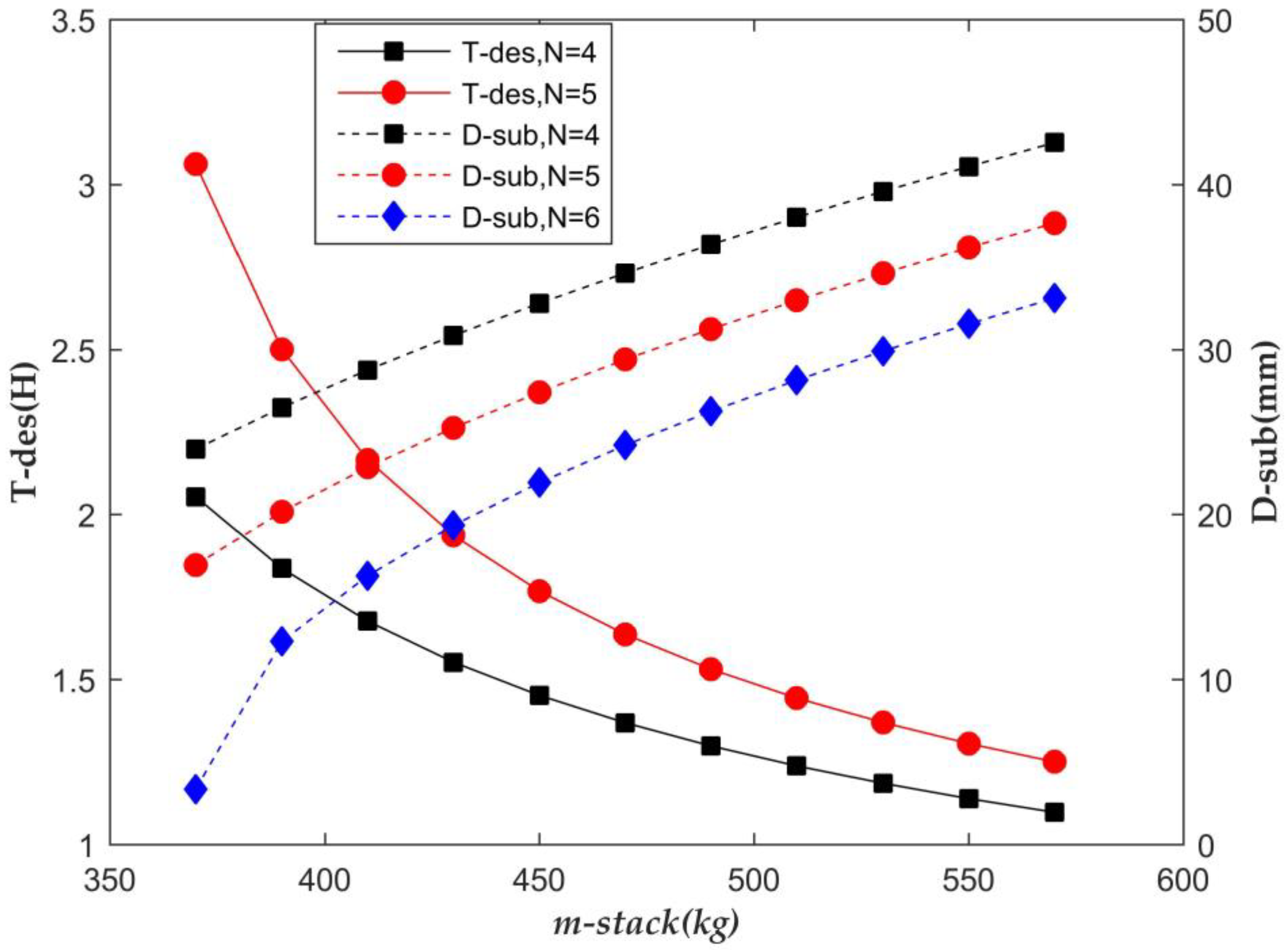
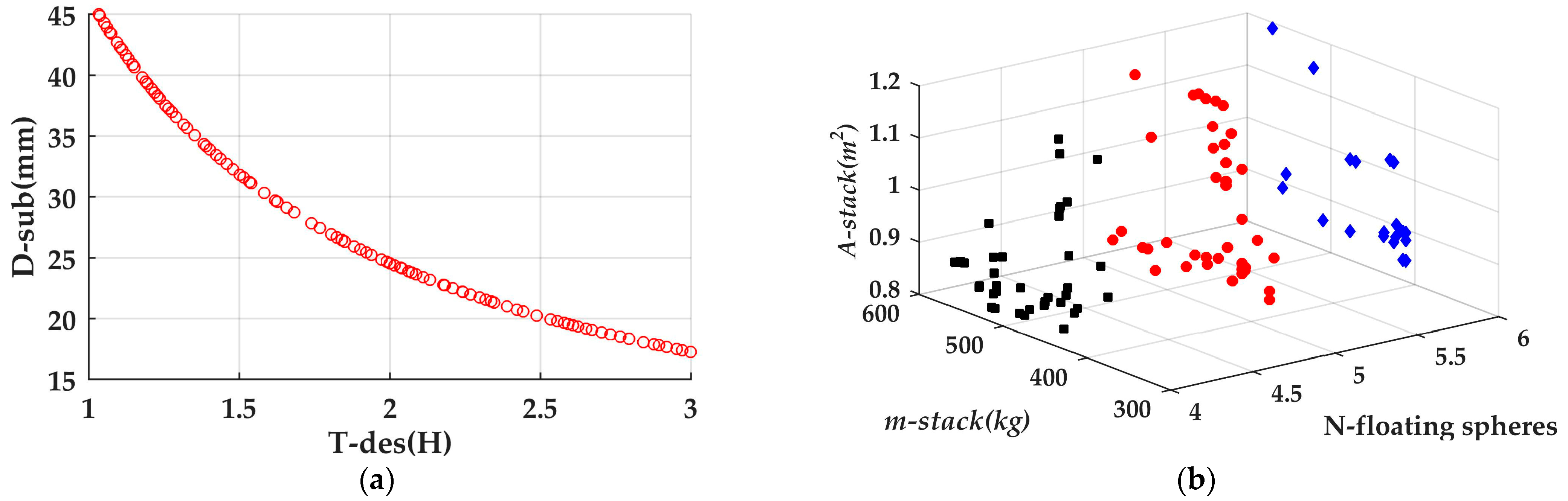
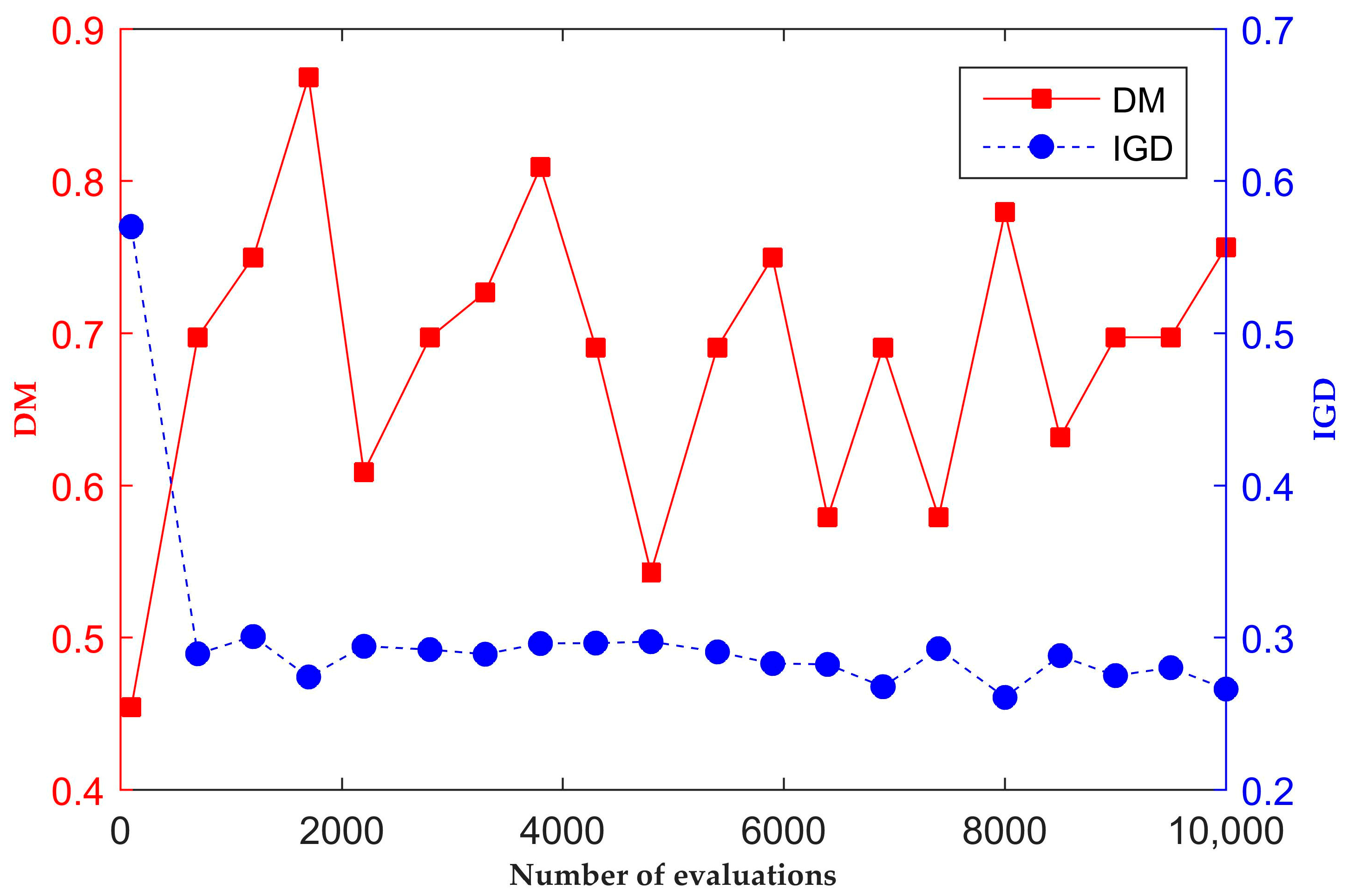
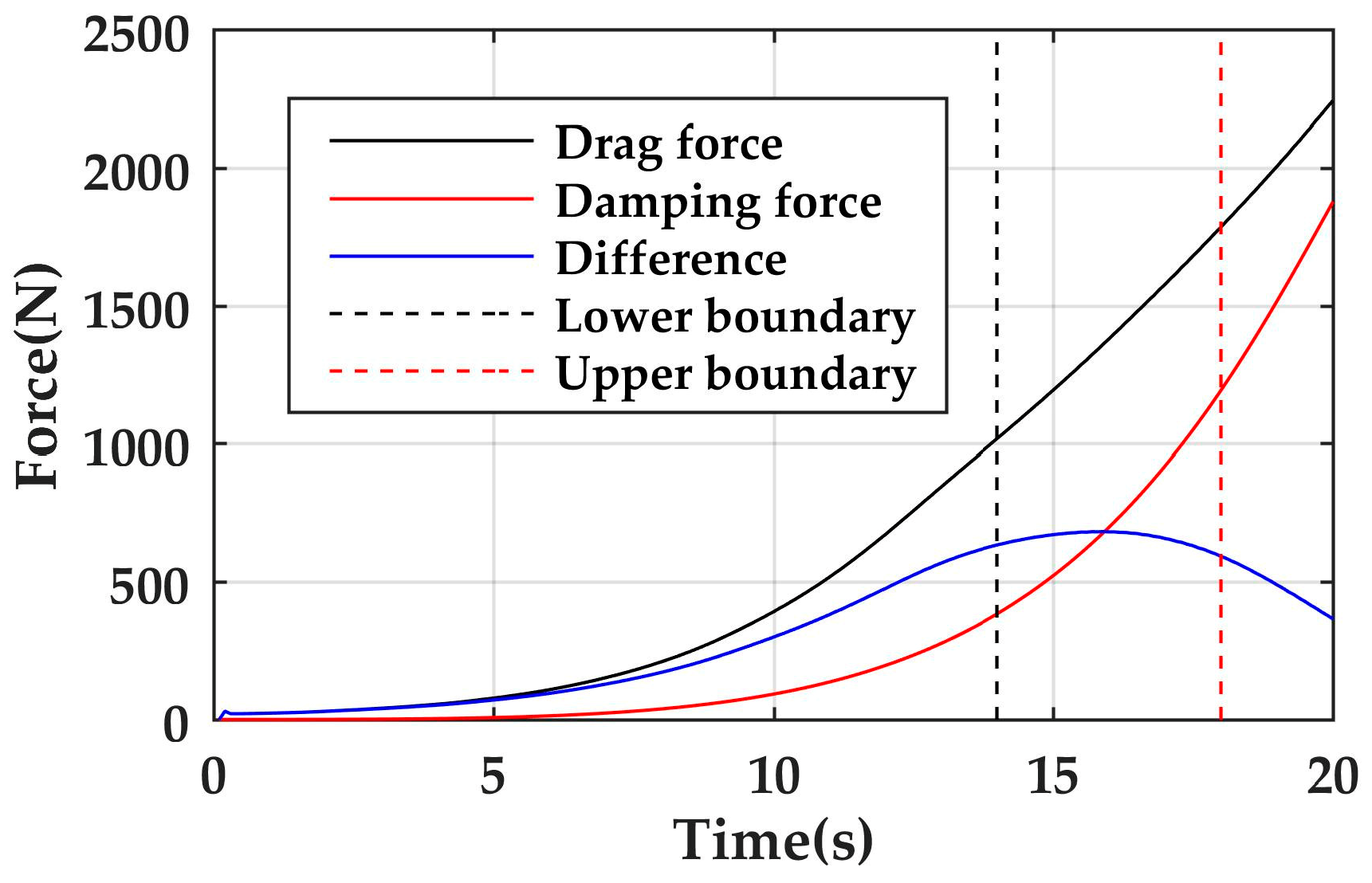
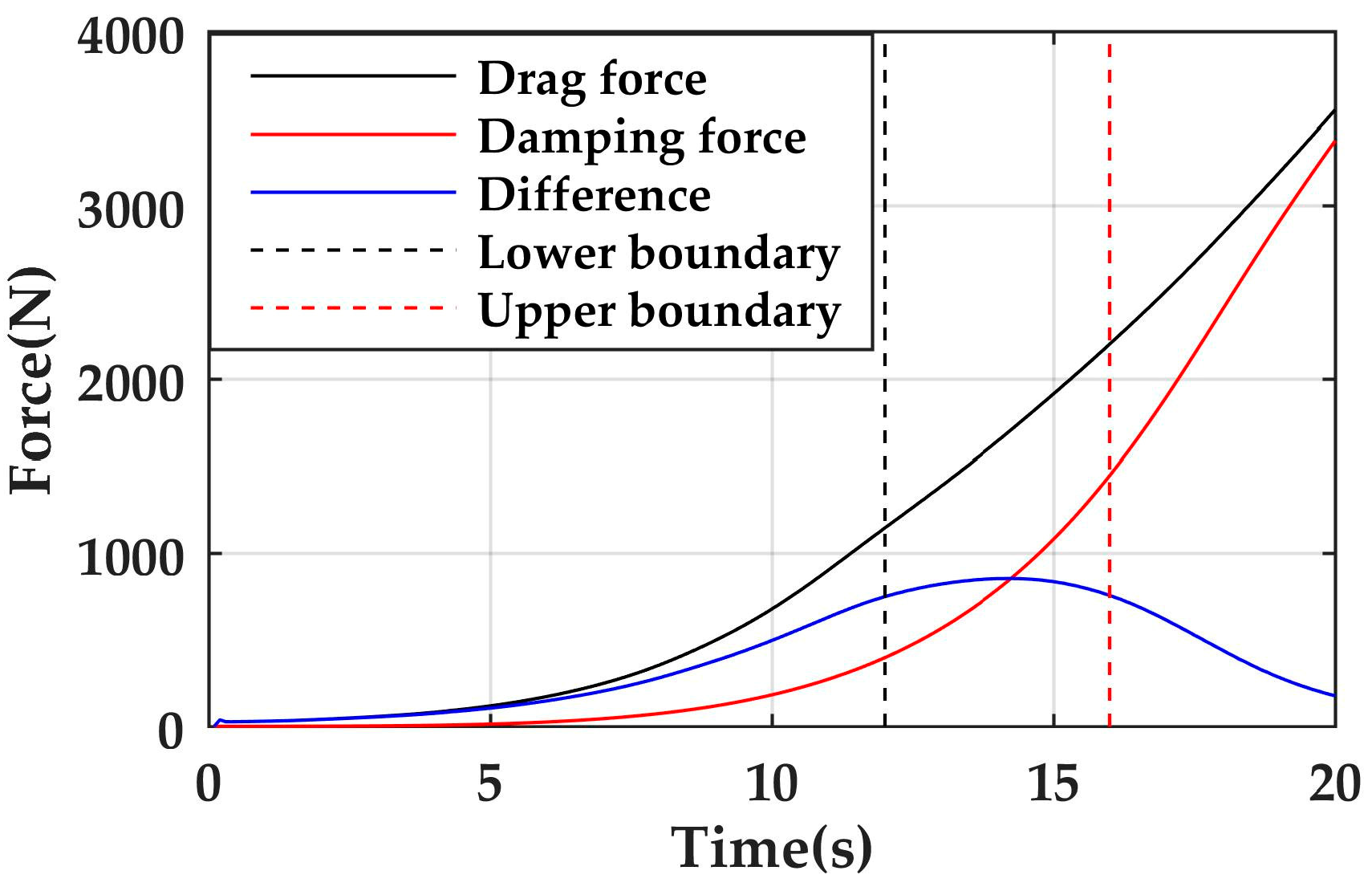
5. Multi-Objective Optimization
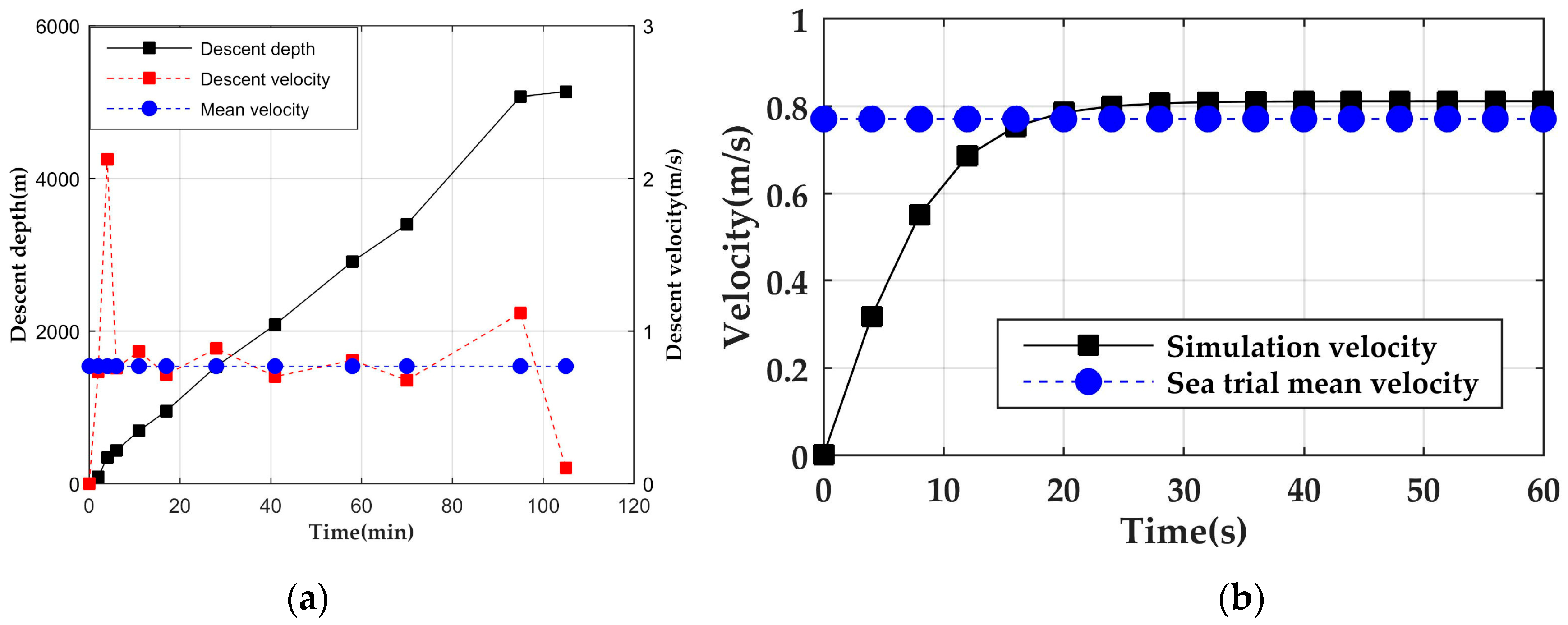
6. Sea Trials
- The depth information reflected by the range data of the acoustic release is relatively accurate and reliable. First, the total mass of the lander system (603 kg) is large, and the sea current has little influence on it. Second, the successful retrieval of the lander at the original location in the later sea trials proved that the horizontal drifts during the descent process can be ignored;
- Removal of instability during the initial launch and final landing, and the steady descent (6–70 min) velocity fluctuates between 0.68 and 0.89 m/s, which meets the expected results.
7. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A





Appendix B
References
- Marshall, N.B. Glimpses into Deep-Sea Biology. In The Arctic Ocean: The Hydrographic Environment and the Fate of Pollutants; Rey, L., Ed.; Palgrave Macmillan: London, UK, 1982; pp. 263–271. [Google Scholar]
- McLellan, B.C. Sustainability Assessment of Deep Ocean Resources. Procedia Environ. Sci. 2015, 28, 502–508. [Google Scholar] [CrossRef] [Green Version]
- Harrould-Kolieb, E.R.; Herr, D. Ocean Acidification and Climate Change: Synergies and Challenges of Addressing Both under the UNFCCC. Clim. Policy 2012, 12, 378–389. [Google Scholar] [CrossRef]
- Cooley, S.R.; Bello, B.; Bodansky, D.; Mansell, A.; Merkl, A.; Purvis, N.; Ruffo, S.; Taraska, G.; Zivian, A.; Leonard, G.H. Overlooked Ocean Strategies to Address Climate Change. Glob. Environ. Chang. 2019, 59, 101968. [Google Scholar] [CrossRef]
- Nunoura, T.; Takaki, Y.; Hirai, M.; Shimamura, S.; Makabe, A.; Koide, O.; Kikuchi, T.; Miyazaki, J.; Koba, K.; Yoshida, N.; et al. Hadal Biosphere: Insight into the Microbial Ecosystem in the Deepest Ocean on Earth. Proc. Natl. Acad. Sci. USA 2015, 112, E1230–E1236. [Google Scholar] [CrossRef] [Green Version]
- Bowen, A.D.; Yoerger, D.R.; Taylor, C.; McCabe, R.; Howland, J.; Gomez-Ibanez, D.; Kinsey, J.C.; Heintz, M.; McDonald, G.; Peters, D.B.; et al. The Nereus Hybrid Underwater Robotic Vehicle for Global Ocean Science Operations to 11,000 m Depth. In Proceedings of the OCEANS 2008, Quebec, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Smith, K.L., Jr.; Clifford, C.H.; Eliason, A.H.; Walden, B.; Rowe, G.T.; Teal, J.M. A Free Vehicle for Measuring Benthic Community Metabolism1. Limnol. Oceanogr. 1976, 21, 164–170. [Google Scholar] [CrossRef]
- Duineveld, G.C.A.; Lavaleye, M.S.S.; Berghuis, E.M. Particle Flux and Food Supply to a Seamount Cold-Water Coral Community (Galicia Bank, NW Spain). Mar. Ecol. Prog. Ser. 2004, 277, 13–23. [Google Scholar] [CrossRef]
- Lavaleye, M.; Duineveld, G.; Lundälv, T.; White, M.; Guihen, D.; Kiriakoulakis, K.; Wolff, G. Cold-Water Corals on the Tisler Reef: Preliminary Observations on the Dynamic Reef Environment. Oceanography 2009, 22, 76–84. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Yu, X.; Li, X. Benvir: A in Situ Deep-Sea Observation for Benthic Environmental Monitoring. High Technol. Lett. 2015, 25, 54–60. [Google Scholar]
- Linke, P.; Sommer, S.; Rovelli, L.; McGinnis, D.F. Physical Limitations of Dissolved Methane Fluxes: The Role of Bottom-Boundary Layer Processes. Mar. Geol. 2010, 272, 209–222. [Google Scholar] [CrossRef]
- Jamieson, A.J.; Fujii, T.; Solan, M.; Priede, I.G. HADEEP: Free-Falling Landers to the Deepest Places on Earth. Mar. Technol. Soc. J. 2009, 43, 151–160. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Q.; Zhang, A.; Tang, Y. 7000M Lander Design for Hadal Research. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–4. [Google Scholar]
- Peoples, L.M.; Norenberg, M.; Price, D.; McGoldrick, M.; Novotny, M.; Bochdansky, A.; Bartlett, D.H. A Full-Ocean-Depth Rated Modular Lander and Pressure-Retaining Sampler Capable of Collecting Hadal-Endemic Microbes under in Situ Conditions. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2019, 143, 50–57. [Google Scholar] [CrossRef]
- Wei, Z.-F.; Li, W.-L.; Li, J.; Chen, J.; Xin, Y.-Z.; He, L.-S.; Wang, Y. Multiple in Situ Nucleic Acid Collections (MISNAC) from Deep-Sea Waters. Front. Mar. Sci. 2020, 7. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.; Ma, T.; Liu, R.; Lai, Q.; Shao, Z. Hydrocarboniclastica marina gen. nov., sp. nov., a Marine Hydrocarbonoclastic Bacterium Isolated from an in Situ Enriched Hydrocarbon-Degrading Consortium in Sea Sediment. Int. J. Syst. Evol. Microbiol. 2019, 69, 2250–2257. [Google Scholar] [CrossRef] [PubMed]
- Barclay, D.R.; Simonet, F.; Buckingham, M.J. Deep Sound: A Free-Falling Sensor Platform for Depth-Profiling Ambient Noise in the Deep Ocean. Mar. Technol. Soc. J. 2009, 43, 144–150. [Google Scholar] [CrossRef] [Green Version]
- Yonggang, J.; Chaoqi, Z.; Liping, L.; Dong, W. Marine Geohazards: Review and Future Perspective. Acta Geol. Sin.—Engl. Ed. 2016, 90, 1455–1470. [Google Scholar] [CrossRef]
- Montagner, J.-P.; Karczewski, J.-F.; Romanowicz, B.; Bouaricha, S.; Lognonné, P.; Roult, G.; Stutzmann, E.; Thirot, J.-L.; Brion, J.; Dole, B.; et al. The French Pilot Experiment OFM-SISMOBS: First Scientific Results on Noise Level and Event Detection. Phys. Earth Planet. Inter. 1994, 84, 321–336. [Google Scholar] [CrossRef]
- Sommer, S.; Pfannkuche, O.; Linke, P.; Luff, R.; Greinert, J.; Drews, M.; Gubsch, S.; Pieper, M.; Poser, M.; Viergutz, T. Efficiency of the Benthic Filter: Biological Control of the Emission of Dissolved Methane from Sediments Containing Shallow Gas Hydrates at Hydrate Ridge. Glob. Biogeochem. Cycles 2006, 20. [Google Scholar] [CrossRef] [Green Version]
- Sommer, S.; Linke, P.; Pfannkuche, O.; Schleicher, T.; Deimling, J.S.V.; Reitz, A.; Haeckel, M.; Flögel, S.; Hensen, C. Seabed Methane Emissions and the Habitat of Frenulate Tubeworms on the Captain Arutyunov Mud Volcano (Gulf of Cadiz). Mar. Ecol. Prog. Ser. 2009, 382, 69–86. [Google Scholar] [CrossRef]
- Linke, P.; Suess, E.; Torres, M.; Martens, V.; Rugh, W.D.; Ziebis, W.; Kulm, L.D. In Situ Measurement of Fluid Flow from Cold Seeps at Active Continental Margins. Deep. Sea Res. Part I Oceanogr. Res. Pap. 1994, 41, 721–739. [Google Scholar] [CrossRef]
- Smith, K.L.; Baldwin, R.J.; Karl, D.M.; Boetius, A. Benthic Community Responses to Pulses in Pelagic Food Supply: North Pacific Subtropical Gyre. Deep. Sea Res. Part I Oceanogr. Res. Pap. 2002, 49, 971–990. [Google Scholar] [CrossRef]
- Ekeroth, N.; Kononets, M.; Walve, J.; Blomqvist, S.; Hall, P.O.J. Effects of Oxygen on Recycling of Biogenic Elements from Sediments of a Stratified Coastal Baltic Sea Basin. J. Mar. Syst. 2016, 154, 206–219. [Google Scholar] [CrossRef]
- Khripounoff, A.; Caprais, J.-C.; Crassous, P.; Etoubleau, J. Geochemical and Biological Recovery of the Disturbed Seafloor in Polymetallic Nodule Fields of the Clipperton-Clarion Fracture Zone (CCFZ) at 5000-m Depth. Limnol. Oceanogr. 2006, 51, 2033–2041. [Google Scholar] [CrossRef] [Green Version]
- Kononets, M.; Tengberg, A.; Nilsson, M.; Ekeroth, N.; Hylén, A.; Robertson, E.K.; van de Velde, S.; Bonaglia, S.; Rüt-ting, T.; Blomqvist, S.; et al. In Situ Incubations with the Gothenburg Benthic Chamber Landers: Applications and Quality Control. J. Mar. Syst. 2021, 214, 103475. [Google Scholar] [CrossRef]
- Tréhu, A.M.; de Moor, A.; Madrid, J.M.; Sáez, M.; Chadwell, C.D.; Ortega-Culaciati, F.; Ruiz, J.; Ruiz, S.; Tryon, M.D. Post-Seismic Response of the Outer Accretionary Prism after the 2010 Maule Earthquake, Chile. Geosphere 2019, 16, 13–32. [Google Scholar] [CrossRef] [Green Version]
- Person, R.; Aoustin, Y.; Blandin, J.; Marvaldi, J.; Rolin, J.F. From Bottom Landers to Observatory Networks. Ann. Geophys. 2006, 49. [Google Scholar] [CrossRef]
- Spagnoli, F.; Penna, P.; Giuliani, G.; Masini, L.; Martinotti, V. The AMERIGO Lander and the Automatic Benthic Chamber (CBA): Two New Instruments to Measure Benthic Fluxes of Dissolved Chemical Species. Sensors 2019, 19, 2632. [Google Scholar] [CrossRef] [Green Version]
- Mortensen, A.C.; Lange, R.E. Design Considerations of Wing Stabilized Free-Fall Vehicles. Deep. Sea Res. Oceanogr. Abstr. 1976, 23, 1231–1240. [Google Scholar] [CrossRef]
- Jun, C. Research on Techniques of Hadal Lander and Applications on Biology. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2018. [Google Scholar]
- Gang, X.; Yanjun, L.; Yifan, X. Hydrodynamic Characteristics Research and Structure Optimization of Hadal Lander with Hydrofoil. J. Mech. Eng. 2022, 58, 1–15. [Google Scholar]
- Yuanyuan, S.; Donghui, Z. Design of a Deep-Sea Microbe Enrichment Device. J. Hangzhou Dianzi Univ. 2017, 37, 57–60. [Google Scholar]
- Thor, I.F. Guidance and Control of Ocean Vehicles, Chapter 4; John Wiley and Sons Ltd.: New York, NY, USA, 1994. [Google Scholar]
- SOLIDWORKS Flow Simulation. Flow Simulation 2017 Technical Reference; Dassault System: Vélizy-Villacoublay, France, 2017. [Google Scholar]
- Kim, H.; Akimoto, H.; Islam, H. Estimation of the Hydrodynamic Derivatives by RaNS Simulation of Planar Motion Mechanism Test. Ocean. Eng. 2015, 108, 129–139. [Google Scholar] [CrossRef]
- Lack, S.; Rentzow, E.; Jeinsch, T. Experimental Parameter Identification for an Open-Frame ROV: Comparison of Towing Tank Tests and Open Water Self-Propelled Tests. IFAC-PapersOnLine 2019, 52, 271–276. [Google Scholar] [CrossRef]
- Yu, W. Dynamic Analysis of Sediment Sediment Bottom Sitting Process of Deep Sea Lander. Master’s Thesis, Hangzhou Dianzi University, Hangzhou, China, 2020. [Google Scholar]
- Yu, Z.; Zhang, C.; Chen, J.; Ren, Z. Dynamic Analysis of Bottom Subsidence of Benthic Lander. J. Mar. Sci. Eng. 2022, 10, 824. [Google Scholar] [CrossRef]
- Release PlatEMO v1.6 (2018/9/9), BIMK/PlatEMO, GitHub. Available online: https://github.com/BIMK/PlatEMO/releases/tag/v1.6 (accessed on 20 November 2022).
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB Platform for Evolutionary Multi-Objective Optimization [Educational Forum]. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Jain, S. Running Performance Metrics for Evolutionary Multi-Objective Optimizations. In Proceedings of the Fourth Asia-Pacific Conference on Simulated Evolution and Learning (SEAL’02), Orchid Country Club, Singapore, 18–22 November 2002; pp. 1–18. [Google Scholar]
- Coello, C.A.C.; Cortés, N.C. Solving Multiobjective Optimization Problems Using an Artificial Immune System. Genet. Program. Evolvable Mach. 2005, 6, 163–190. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhou, A.; Zhao, S.; Suganthan, P.; Liu, W.; Tiwari, S. Multiob-jective optimization test instances for the CEC 2009 special session and competition University of Essex, Colchester, UK and Nanyang technological University, Singapore, special session on performance assessment of multi-objective optimization algorithms. Tech. Rep. 2008, 264, 1–30. Available online: https://www.researchgate.net/publication/265432807 (accessed on 20 November 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FVR | ALBEX | FLUFO | HADEEP | Benvir | HaiJiao | UCSD-Lander | |
|---|---|---|---|---|---|---|---|
| Background | |||||||
| Country | U.S.A. | Netherland | Germany | Japan and UK | China | China | U.S.A. |
| Time | 1975 | 1998 | 2009 | 2009 | 2009 | 2015 | 2019 |
| Sensor | |||||||
| CTD | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Dissolved Oxygen (DO) | ✓ | ✓ | ✓ | ✓ | |||
| PH | ✓ | ||||||
| Sampling modules | |||||||
| Camera | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Seawater | ✓ | ✓ | ✓ | ✓ | |||
| Sediments | ✓ | ✓ | ✓ | ||||
| (Microbe Enrichment) | ✓ | ||||||
| Biological trap | ✓ | ✓ | ✓ | ||||
| Basic Mesh 1/(m) | Cells | Drag/(N) in 0.1 m/s | Drag/(N) in 1.0 m/s |
|---|---|---|---|
| 0.17 | 131,459 | 7.18 | 721.98 |
| 0.15 | 210,683 | 6.02 | 601.49 |
| 0.13 | 311,779 | 6.98 | 704.71 |
| 0.11 | 525,830 | 6.97 | 696.15 |
| 0.09 | 898,422 | 6.83 | 686.12 |
| 0.07 | 1,974,685 | 6.81 | 681.81 |
| Group | Boundary(s) | (kg) 1 | ||
|---|---|---|---|---|
| 1 | 0.100 | 0.143 | 14–18 | 4008.4 |
| 2 | 0.125 | 0.173 | 12–16 | 4138.2 |
| 3 | 0.150 | 0.212 | 12–14 | 4163.9 |
| The mean value of (kg) in 3 groups | 4103.5 | |||
| Symbol | Description | Unit | Symbol | Description | Unit |
|---|---|---|---|---|---|
| N | number of floatation spheres | - | descent time | H | |
| mass of the weight stack | kg | descent velocity | m/s | ||
| bottom area of the weight stack | subsidence depth | mm |
| Decision Variables | Objective Values | Decision Variables | Objective Values | ||||||
|---|---|---|---|---|---|---|---|---|---|
| N | (kg) | (H) | (mm) | N | (kg) | (H) | (mm) | ||
| 4 | 557.7 | 0.89 | 1.03 | 45.0 | 4 | 511.8 | 0.92 | 1.18 | 39.8 |
| 4 | 510.0 | 0.83 | 1.10 | 42.3 | 4 | 508.1 | 0.87 | 1.13 | 41.3 |
| 5 | 392.0 | 0.96 | 1.76 | 27.5 | 5 | 441.9 | 1.20 | 2.63 | 19.3 |
| 5 | 468.3 | 1.19 | 2.35 | 21.3 | 5 | 444.5 | 1.10 | 2.24 | 22.2 |
| 6 | 410.4 | 0.89 | 3.00 | 17.2 | 6 | 553.6 | 0.92 | 1.44 | 33.1 |
| 6 | 436.5 | 0.88 | 2.32 | 21.5 | 6 | 414.0 | 0.89 | 2.88 | 17.9 |
| Descent Time(min) | Descent Depth(m) | Corresponding Velocity(m/s) | Descent Time(min) | Descent Depth(m) | Corresponding Velocity(m/s) |
|---|---|---|---|---|---|
| 0 | 0 | - | 28 | 1536 | 0.89 |
| 2 | 88 | 0.73 | 41 | 2083 | 0.70 |
| 4 | 343 | 2.13 | 58 | 2908 | 0.81 |
| 6 | 434 | 0.76 | 70 | 3396 | 0.68 |
| 11 | 694 | 0.87 | 95 | 5071 | 1.12 |
| 17 | 951 | 0.71 | 105 | 5133 | 0.10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Dong, C.; Shao, Z.; Zhou, D. Analysis of the Descent Process and Multi-Objective Optimization Design of a Benthic Lander. J. Mar. Sci. Eng. 2023, 11, 224. https://doi.org/10.3390/jmse11010224
Zhang Q, Dong C, Shao Z, Zhou D. Analysis of the Descent Process and Multi-Objective Optimization Design of a Benthic Lander. Journal of Marine Science and Engineering. 2023; 11(1):224. https://doi.org/10.3390/jmse11010224
Chicago/Turabian StyleZhang, Qiao, Chunming Dong, Zongze Shao, and Donghui Zhou. 2023. "Analysis of the Descent Process and Multi-Objective Optimization Design of a Benthic Lander" Journal of Marine Science and Engineering 11, no. 1: 224. https://doi.org/10.3390/jmse11010224