
Viscoelastic Wave–Ice Interactions: A Computational Fluid–Solid Dynamic Approach

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
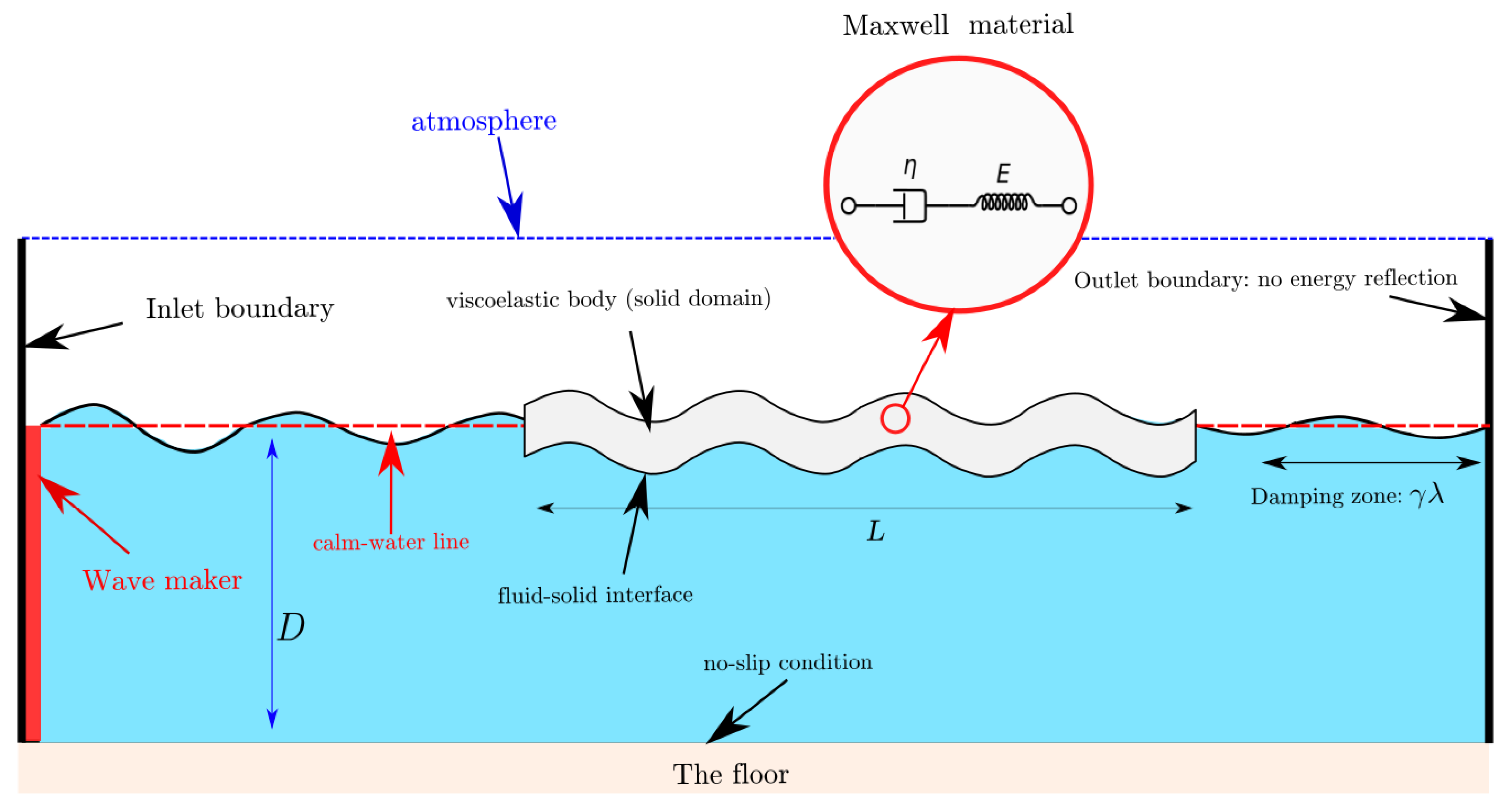
2. Problem Statement
2.1. Overall Description of the Problem
2.2. Theoretical Background
2.3. Scaling Law
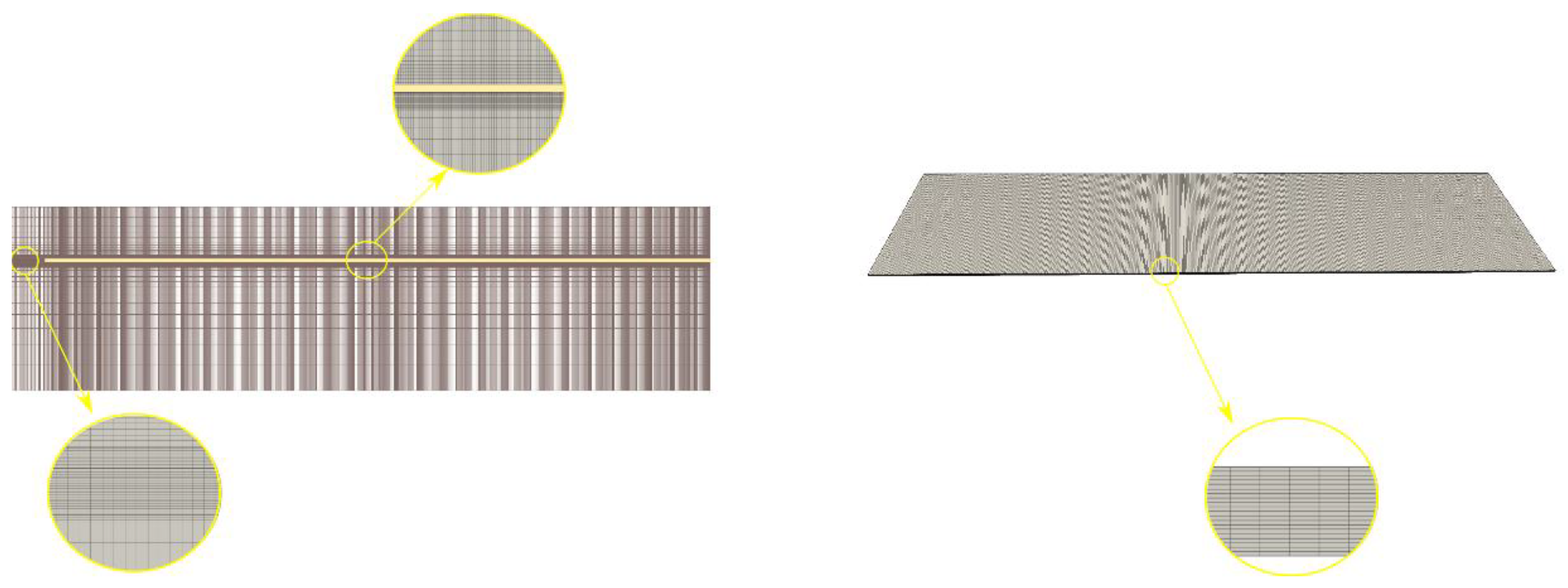
3. Computational Model
3.1. Problem Formulation
3.2. Computational Technique
4. Studied Cases
5. Results and Discussion
5.1. Viscoelastic Cover Exposed to Water Waves
5.1.1. Viscoelastic Cover Exposed to Water Waves
5.1.2. Example of Wave Attenuation
5.1.3. Example of Wave Attenuation
5.1.4. Snapshots
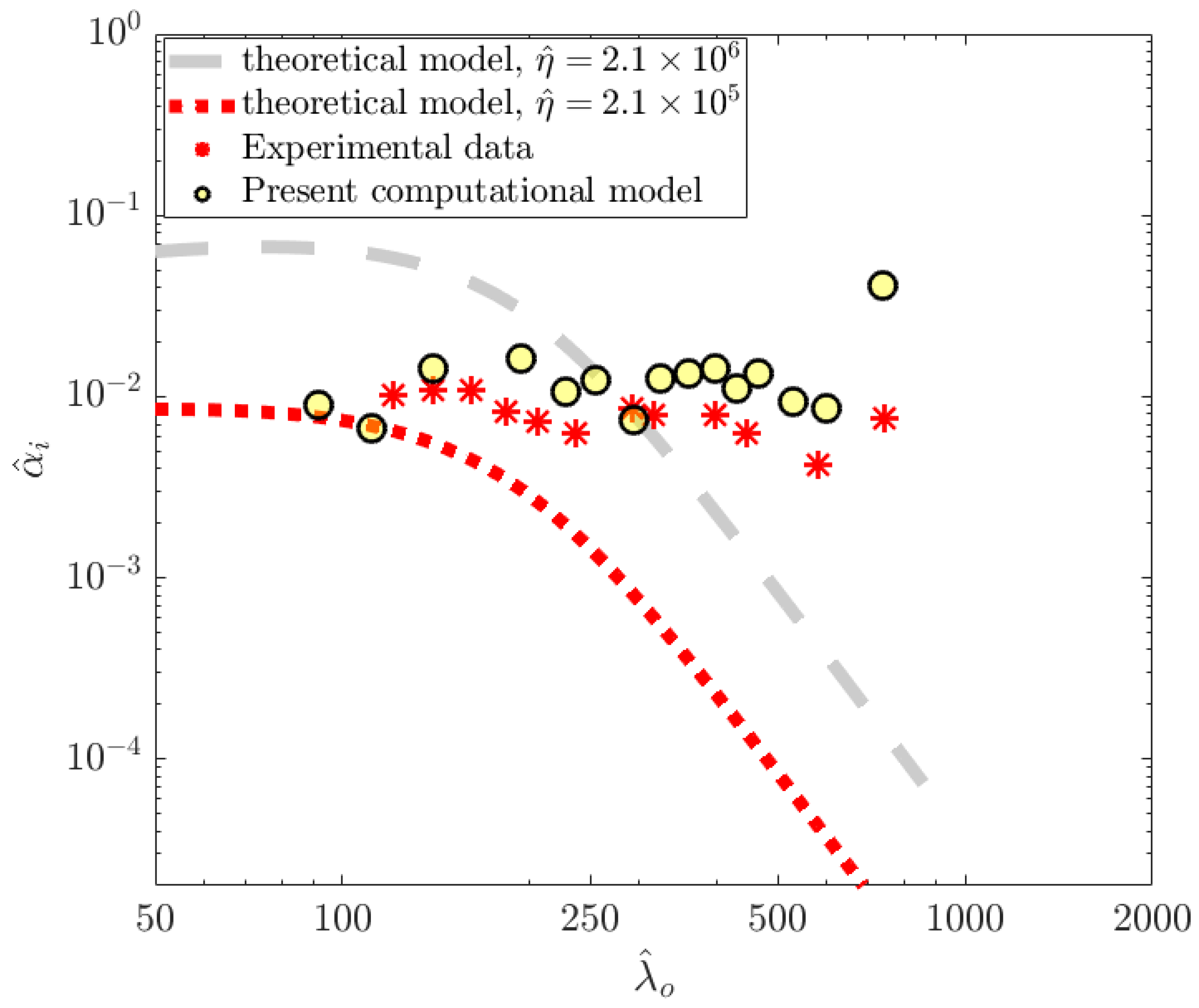
5.2. Validation of the Model
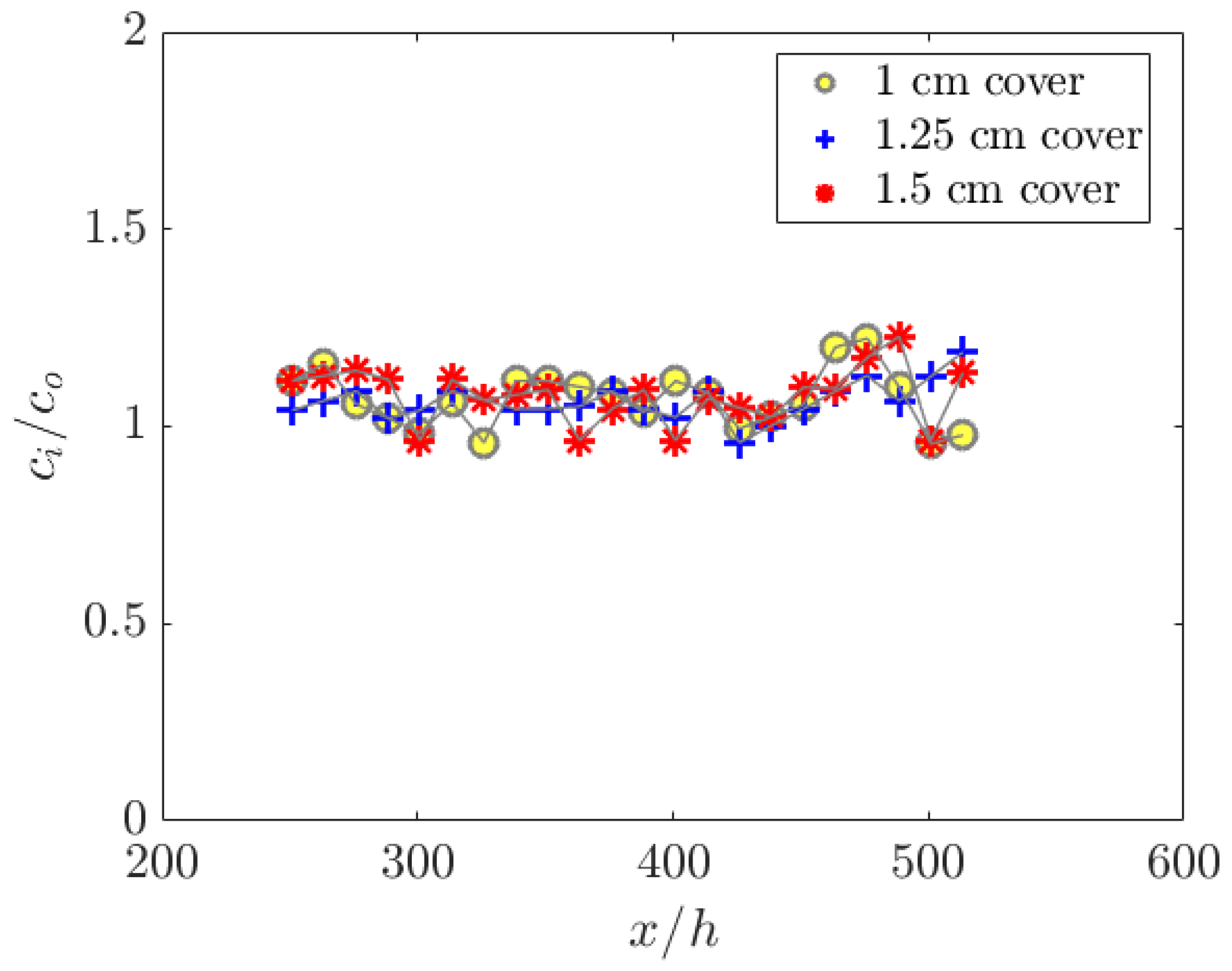
5.3. Results of Different Scales
5.4. Freshwater Ice Cover Exposed to Water Waves
5.5. Sea Ice Cover Exposed to Water Waves
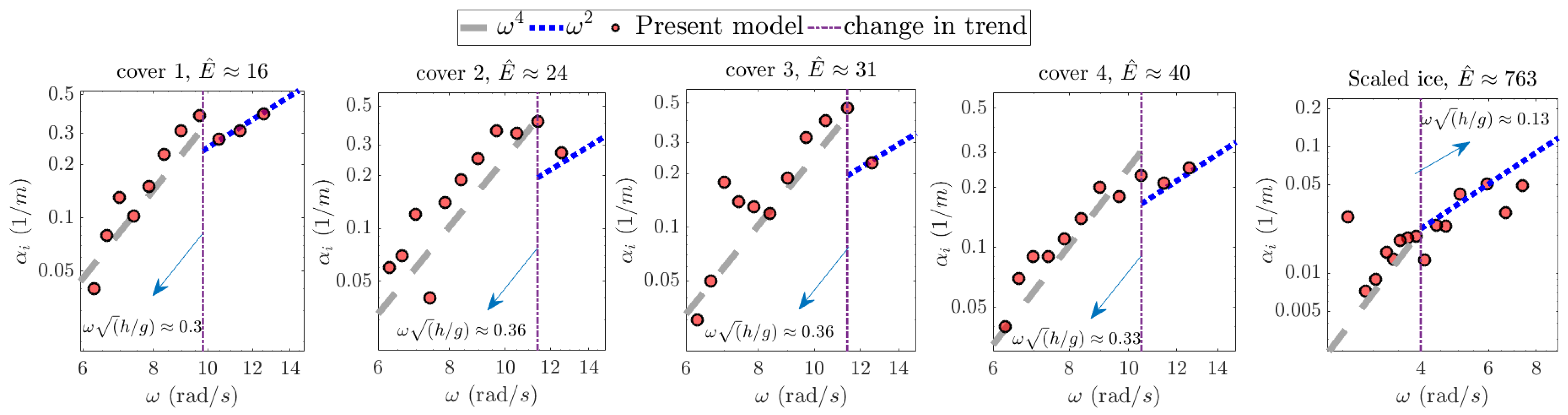
5.6. Dependency of Decay Rates on the Frequency
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Martin, S.; Kaufmann, P. A field and laboratory study of wave damping by grease ice. J. Glaciol. 1981, 27, 283–313. [Google Scholar] [CrossRef]
- Wadhams, P. Ice in the Ocean; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Parkinson, C.L. A 40-y record reveals gradual Antarctic sea ice increases followed by decreases at rates far exceeding the rates seen in the Arctic. Proc. Natl. Acad. Sci. USA 2019, 116, 14414–14423. [Google Scholar] [CrossRef] [PubMed]
- Smith, E.K.; Eder, C.; Katsanidou, A. On thinning ice: Understanding the knowledge, concerns and behaviors towards polar ice loss in Germany. Polar Geogr. 2020, 43, 243–258. [Google Scholar] [CrossRef]
- Melia, N.; Haines, K.; Hawkins, E. Sea ice decline and 21st century trans-Arctic shipping routes. Geophys. Res. Lett. 2016, 43, 9720–9728. [Google Scholar] [CrossRef]
- Wei, T.; Yan, Q.; Qi, W.; Ding, M.; Wang, C. Projections of Arctic sea ice conditions and shipping routes in the twenty-first century using CMIP6 forcing scenarios. Environ. Res. Lett. 2020, 15, 104079. [Google Scholar] [CrossRef]
- Huang, L.; Tuhkuri, J.; Igrec, B.; Li, M.; Stagonas, D.; Toffoli, A.; Cardiff, P.; Thomas, G. Ship resistance when operating in floating ice floes: A combined CFD&DEM approach. Mar. Struct. 2020, 74, 102817. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z.; Ryan, C.; Ringsberg, J.W.; Pena, B.; Li, M.; Ding, L.; Thomas, G. Ship resistance when operating in floating ice floes: Derivation, validation, and application of an empirical equation. Mar. Struct. 2021, 79, 103057. [Google Scholar] [CrossRef]
- Robin, G.D.Q. Wave propagation through fields of pack ice. Philos. Trans. R. Soc. A 1963, 255, 313–339. [Google Scholar]
- Squire, V.A.; Moore, S.C. Direct measurement of the attenuation of ocean waves by pack ice. Nature 1980, 283, 365–368. [Google Scholar] [CrossRef]
- Squire, V.A. Ocean Wave Interactions with Sea Ice: A Reappraisal. Annu. Rev. Fluid Mech. 2020, 52, 37–60. [Google Scholar] [CrossRef]
- Carolis, D.C.; Desiderio, D. Dispersion and attenuation of gravity waves in ice: A two-layer viscous fluid model with experimental data validation. Phys. Lett. A 2002, 305, 399–412. [Google Scholar] [CrossRef]
- McGovern, D.J.; Bai, W. Experimental study on kinematics of sea ice floes in regular waves. Cold Reg. Sci. Technol. 2014, 103, 15–30. [Google Scholar] [CrossRef]
- Huang, L.; Thomas, G. Simulation of wave interaction with a circular ice floe. J. Offshore Mech. Arct. Eng. 2019, 141, 1–9. [Google Scholar] [CrossRef]
- Kohout, A.L.; Meylan, M.H.; Plew, D.R. Wave attenuation in a marginal ice zone due to the bottom roughness of ice floes. Ann. Glaciol. 2011, 52, 118–122. [Google Scholar] [CrossRef]
- Voermans, J.J.; Babanin, A.V.; Thomson, J.; Smith, M.M.; Shen, H.H. Wave Attenuation by Sea Ice Turbulence. Geophys. Res. Lett. 2019, 46, 6796–6803. [Google Scholar] [CrossRef]
- Tran-Duc, T.; Meylan, M.H.; Thamwattana, N.; Lamichhane, B.P. Wave Interaction and Overwash with a Flexible Plate by Smoothed Particle Hydrodynamics. Water 2020, 12, 3354. [Google Scholar] [CrossRef]
- Li, H.; Gedikli, E.D.; Lubbad, R.; Nord, T.S. Laboratory study of wave-induced ice-ice collisions using robust principal component analysis and sensor fusion. Cold Reg. Sci. Technol. 2020, 172, 103010. [Google Scholar] [CrossRef]
- Meylan, M.H.; Bennetts, L.; Mosig, J.; Rogers, W.; Doble, M.J.; Peter, M.A. Dispersion Relations, Power Laws, and Energy Loss for Waves in the Marginal Ice Zone. J. Geophys. Res. Oceans 2018, 123, 3322–3335. [Google Scholar] [CrossRef]
- Collins, C.O., III; Rogers, W.E.; Lund, B. An investigation into the dispersion of ocean surface waves in sea ice. Ocean. Dyn. 2017, 67, 263–280. [Google Scholar] [CrossRef]
- Squire, V. Of ocean waves and sea-ice revisited. Cold Reg. Sci. Technol. 2007, 49, 110–133. [Google Scholar] [CrossRef]
- Greenhill, A.G. Wave motion in hydrodynamics. Am. J. Math. 1886, 9, 62–96. [Google Scholar] [CrossRef]
- Hendrickson, J.A. Theoretical Investigation of Semi-Infinite Ice Floes in Water of Infinite Depth; National Engineering Science Company 711 South Fair Oaks Avenue Pasadena: Pasadena, CA, USA, 1963; NESCONo. P-457/SN-113. [Google Scholar]
- Wang, R.; Shen, H.H. Gravity waves propagating into an ice-covered ocean: A viscoelastic model. J. Geophys. Res. Space Phys. 2010, 115, C06024. [Google Scholar] [CrossRef]
- Keller, J.B. Gravity waves on ice-covered water. J. Geophys. Res. Earth Surf. 1998, 103, 7663–7669. [Google Scholar] [CrossRef]
- Ren, K.; Wu, G.X.; Thomas, G.A. Wave excited motion of a body floating on water confined between two semi-infinite ice sheets. Phys. Fluids 2016, 28, 127101. [Google Scholar] [CrossRef]
- Li, Z.F.; Wu, G.X.; Ji, C.Y. Interaction of wave with a body submerged below an ice sheet with multiple arbitrarily spaced cracks. Phys. Fluids 2018, 30, 057107. [Google Scholar] [CrossRef]
- Li, Z.F.; Wu, G.X. Hydrodynamic force on a ship floating on the water surface near a semi-infinite ice sheet. Phys. Fluids 2021, 33, 127101. [Google Scholar] [CrossRef]
- Xue, Y.Z.; Zeng, L.D.; Ni, B.Y.; Korobkin, A.A.; Khabakhpasheva, T.I. Hydroelastic response of an ice sheet with a lead to a moving load. Phys. Fluids 2021, 33, 037109. [Google Scholar] [CrossRef]
- Khabakhpasheva, T.I.; Korobkin, A.A. Blunt body impact onto viscoelastic floating ice plate with a soft layer on its upper surface. Phys. Fluids. 2021, 33, 062105. [Google Scholar] [CrossRef]
- Fox, C.; Squire, V.A. Coupling between an ocean and an ice shelf. Ann. Glaciol. 1991, 15, 101–108. [Google Scholar] [CrossRef]
- Mosig, J.E.M.; Montiel, F.; Squire, V.A. Comparison of viscoelastic-type models for ocean wave attenuation in ice-covered seas. J. Geophys. Res. Oceans 2015, 120, 6072–6090. [Google Scholar] [CrossRef]
- Voermans, J.J.; Liu, Q.; Marchenko, A.; Rabault, J.; Filchuk, K.; Ryzhov, I.; Heil, P.; Waseda, T.; Nose, T.; Kodaira, T.; et al. Wave dispersion and dissipation in landfast ice: Comparison of observations against models. Cryosphere 2021, 15, 5557–5575. [Google Scholar] [CrossRef]
- Sree, D.K.; Law, A.W.-K.; Shen, H.H. An experimental study on the interactions between surface waves and floating viscoelastic covers. Wave Motion 2017, 70, 195–208. [Google Scholar] [CrossRef]
- Ali, K.; Dutta, H.; Yilmazer, R.; Noeiaghdam, S. On the New Wave Behaviors of the Gilson-Pickering Equation. Front. Phys. 2020, 8, 54. [Google Scholar] [CrossRef]
- Noeiaghdam, L.; Noeiaghdam, S.; Sidorov, D. Dynamical control on the homotopy analysis method for solving nonlinear shallow water wave equation. J. Phys. Conf. Ser. 2021, 1847, 012010. [Google Scholar] [CrossRef]
- Noeiaghdam, L.; Noeiaghdam, S.; Sidorov, D.N. Dynamical control on the Adomian decomposition method for solving shallow water wave equation. Ipolytech J. 2021, 25, 623–632. [Google Scholar] [CrossRef]
- Bai, W.; Zhang, T.; McGovern, D.J. Response of small sea ice floes in regular waves: A comparison of numerical and experimental results. Ocean. Eng. 2017, 129, 495–506. [Google Scholar] [CrossRef]
- Tavakoli, S.; Babanin, A. Wave energy attenuation by drifting and non-drifting plates. Ocean. Eng. 2021, 236, 108717. [Google Scholar] [CrossRef]
- Newman, J. Wave effects on deformable bodies. Appl. Ocean. Res. 1994, 16, 47–59. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, Y.; Ai, Y.; Chen, C.; Fan, T. Theoretical and Experimental Study on Nonlinear Hydroelastic Responses and Slamming Loads of Ship Advancing in Regular Waves. Shock Vib. 2018, 2018, 1–26. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, G.-J.; Zou, L.; Zheng, H.; Djidjeli, K. Investigation of Non-Linear Ship Hydroelasticity by CFD-FEM Coupling Method. J. Mar. Sci. Eng. 2021, 9, 511. [Google Scholar] [CrossRef]
- Lakshmynarayanana, P.; Hirdaris, S. Comparison of nonlinear one- and two-way FFSI methods for the prediction of the symmetric response of a containership in waves. Ocean. Eng. 2020, 203, 107179. [Google Scholar] [CrossRef]
- Hosseinzadeh, S.; Tabri, K. Hydroelastic effects of slamming impact Loads During free-Fall water entry. Ships Offshore Struct. 2021, 16 (Suppl. S1), 68–84. [Google Scholar] [CrossRef]
- Huang, L.; Ren, K.; Li, M.; Tuković, Ž.; Cardiff, P.; Thomas, G. Fluid-structure interaction of a large ice sheet in waves. Ocean Eng. 2019, 182, 102–111. [Google Scholar] [CrossRef]
- Huang, L.; Li, Y. Design of the submerged horizontal plate breakwater using a fully coupled hydroelastic approach. Comput. Civ. Infrastruct. Eng. 2021, 37, 915–932. [Google Scholar] [CrossRef]
- Yu, J.; Rogers, W.E.; Wang, D.W. A Scaling for Wave Dispersion Relationships in Ice-Covered Waters. J. Geophys. Res. Oceans 2019, 124, 8429–8438. [Google Scholar] [CrossRef]
- Cardiff, P.; Karač, A.; Jaeger, D.P.; Jasak, H.; Nagy, J.; Ivanković, A.; Tuković, Ž. An open-source finite volume toolbox for solid mechanics and fluid-solid interaction simulations. arXiv 2018, arXiv:1808.10736. [Google Scholar]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam®. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Jacobsen, N.G. Waves2foam Manual; Deltares: Delft, The Netherlands, 2017; p. 570. [Google Scholar]
- Huang, L.; Li, Y.; Benites, D.; Windt, C.; Feichtner, A.; Tavakoli, S.; Davidson, J.; Paredes, R.; Quintuna, T.; Ransley, E.; et al. A review on the modelling of wave-structure interactions based on OpenFOAM. OpenFOAM J. 2022, 2, 116–142. [Google Scholar] [CrossRef]
- Sree, D.K.; Law, A.W.-K.; Shen, H.H. An experimental study on gravity waves through a floating viscoelastic cover. Cold Reg. Sci. Technol. 2018, 155, 289–299. [Google Scholar] [CrossRef]
- Yiew, L.; Parra, S.; Wang, D.; Sree, D.; Babanin, A.; Law, A.W.-K. Wave attenuation and dispersion due to floating ice covers. Appl. Ocean Res. 2019, 87, 256–263. [Google Scholar] [CrossRef]
- Squire, V.A.; Dixon, T.W. An analytical model for wave propagation across a crack in an ice sheet. In Proceedings of the 10th International Symposium on Offshore and Polar Engineering, Seattle, WA, USA, 28 May–2 June 2000; Chung, J., Ed.; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2000; Volume 1, pp. 652–655. [Google Scholar]
- Squire, V.A.; Dixon, T.W. How a region of cracked sea ice affects ice-coupled wave propagation. Ann. Glaciol. 2001, 33, 327–332. [Google Scholar] [CrossRef]
- Meylan, M.H.; Bennetts, L.G.; Kohout, A.L. In situ measurements and analysis of ocean waves in the Antarctic marginal ice zone. Geophys. Res. Lett. 2014, 41, 5046–5051. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavakoli, S.; Huang, L.; Azhari, F.; Babanin, A.V. Viscoelastic Wave–Ice Interactions: A Computational Fluid–Solid Dynamic Approach. J. Mar. Sci. Eng. 2022, 10, 1220. https://doi.org/10.3390/jmse10091220
Tavakoli S, Huang L, Azhari F, Babanin AV. Viscoelastic Wave–Ice Interactions: A Computational Fluid–Solid Dynamic Approach. Journal of Marine Science and Engineering. 2022; 10(9):1220. https://doi.org/10.3390/jmse10091220
Chicago/Turabian StyleTavakoli, Sasan, Luofeng Huang, Fatemeh Azhari, and Alexander V. Babanin. 2022. "Viscoelastic Wave–Ice Interactions: A Computational Fluid–Solid Dynamic Approach" Journal of Marine Science and Engineering 10, no. 9: 1220. https://doi.org/10.3390/jmse10091220