
Numerical Investigation on Higher-Order Harmonic Waves Induced by a Submerged Inclined Plate




Abstract
:1. Introduction
2. Numerical Methods
2.1. Fully Nonlinear Numerical Wave Tank
2.2. The Four-Point Method for Extracting Higher-Order Bounded and Free Harmonic Waves
3. Numerical Results and Discussion
3.1. Model Validation
3.1.1. Experiment Setup
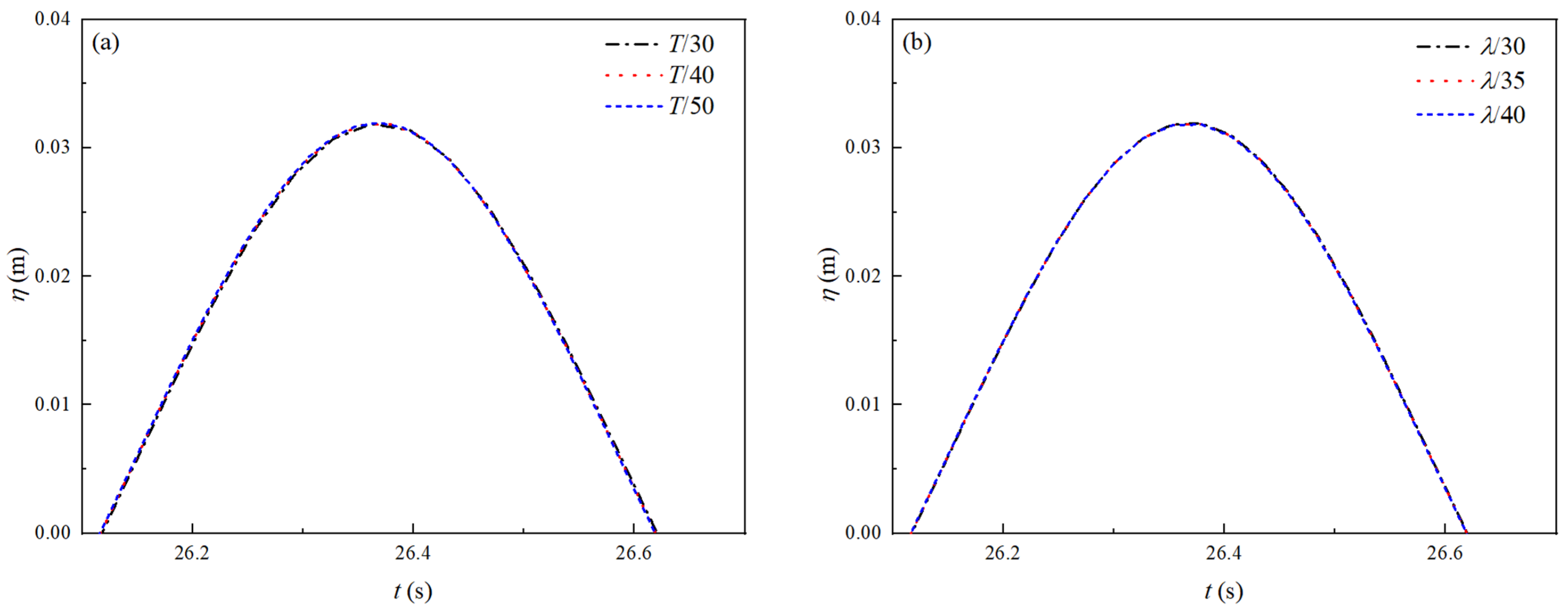
3.1.2. Numerical Model for Nonlinear Wave Evolution
3.1.3. Numerical Model for Wave-Submerged Plate Interaction
3.1.4. Verification with the FEM Simulations by Nallayarasu
3.2. Generation of Higher-Order Harmonic Free Waves
4. Conclusions
- For a certain wave steepness ka, the amplitude of the second-order free wave at the weather and leeward sides of the submerged plate increases with the inclination angle. In addition, the larger the inclination angle is, the larger the extent of the increase is.
- For a certain inclination angle, the amplitude of the second-order free wave in front of and behind the submerged plate increases with the wave steepness.
- The variation of the amplitude of the second-order reflected and transmitted free waves increase gradually with the wave steepness, and a quadratic relationship is found.
- The amplitudes of the first- and second-order harmonic wave decrease and increase with the increase of the inclination angle, respectively. The so-called beating appears due to the phase difference between the bounded and free harmonic waves.
- The phase period of the first-order harmonic wave in front of the plate is exactly twice that of the second-order harmonic wave.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, D.; Zhao, X.; Wang, S.; Yan, D. Numerical study on the wave dissipating performance of a submerged heaving plate breakwater. Ocean Eng. 2021, 219, 108310. [Google Scholar] [CrossRef]
- Liu, C.; Huang, Z.; Chen, W. A numerical study of a submerged horizontal heaving plate as a breakwater. J. Coast. Res. 2017, 33, 917–930. [Google Scholar] [CrossRef]
- Brossard, J.; Perret, G.; Blonce, L.; Diedhiou, A. Higher harmonics induced by a submerged horizontal plate and a submerged rectangular step in a wave flume. Coast. Eng. 2009, 56, 11–22. [Google Scholar] [CrossRef]
- He, M.; Xu, W.; Gao, X.; Ren, B. The layout of submerged horizontal plate breakwater (SHPB) with respect to the tidal-level variation. Coast. Eng. J. 2018, 60, 280–298. [Google Scholar] [CrossRef]
- Faraci, C. Experimental Investigation of the Hydro-Morphodynamic Performances of a Geocontainer Submerged Reef. J. Waterw. Port Coast. Ocean Eng. 2018, 144, 04017045. [Google Scholar] [CrossRef]
- Sheng, W. Wave energy conversion and hydrodynamics modelling technologies: A review. Renew. Sustain. Energy Rev. 2019, 109, 482–498. [Google Scholar] [CrossRef]
- He, M.; Gao, X.; Xu, W.; Ren, B.; Wang, H. Potential application of submerged horizontal plate as a wave energy breakwater: A 2D study using the WCSPH method. Ocean Eng. 2019, 185, 27–46. [Google Scholar] [CrossRef]
- Kim, J.-S.; Nam, B.W.; Park, S.; Kim, K.-H.; Shin, S.-H.; Hong, K. Numerical investigation on hydrodynamic energy conversion performance of breakwater-integrated oscillating water column-wave energy converters. Ocean Eng. 2022, 253, 111287. [Google Scholar] [CrossRef]
- Guo, B.; Ning, D.; Wang, R.; Ding, B. Hydrodynamics of an oscillating water column WEC—Breakwater integrated system with a pitching front-wall. Renew. Energy 2021, 176, 67–80. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z.; Liang, D.F. Experimental investigation on hydrodynamic performance of a breakwater- integrated WEC system. Ocean Eng. 2019, 171, 25–32. [Google Scholar] [CrossRef]
- Ji, Q.; Xu, C.; Jiao, C. Numerical investigation on the hydrodynamic performance of a vertical pile-restrained reversed L type floating breakwater integrated with WEC. Ocean Eng. 2021, 238, 109635. [Google Scholar] [CrossRef]
- Bispo, I.B.S.; Mohapatra, S.C.; Guedes Soares, C. Numerical analysis of a moored very large floating structure composed by a set of hinged plates. Ocean Eng. 2022, 253, 110785. [Google Scholar] [CrossRef]
- Bispo, I.; Mohapatra, S.; Soares, C.G. Numerical model of a WEC-type attachment of a moored submerged horizontal set of articulated plates. Trends Marit. Technol. Eng. 2022, 2, 335–344. [Google Scholar] [CrossRef]
- Ursell, F. The effect of a fixed vertical barrier on surface waves in deep water. Math. Proc. Camb. Philos. Soc. 2008, 43, 374–382. [Google Scholar] [CrossRef]
- Heins, A.E. Water waves over a channel of finite depth with a submerged plane barrier. Can. J. Math. 1950, 2, 210–222. [Google Scholar] [CrossRef]
- Greene, T.R.; Heins, A.E. Water waves over a channel of infinite depth. Q. Appl. Math. 1953, 11, 201–214. [Google Scholar] [CrossRef]
- Burke, J.E. Scattering of Surface Waves on an Infinitely Deep Fluid. J. Math. Phys. 1964, 5, 805–819. [Google Scholar] [CrossRef]
- Patarapanich, M. Maximum and zero reflection from submerged plate. J. Waterw. Port Coast. Ocean Eng. 1984, 110, 171–181. [Google Scholar] [CrossRef]
- Mohapatra, S.C.; Guedes Soares, C. Hydroelastic Response of a Flexible Submerged Porous Plate for Wave Energy Absorption. J. Mar. Sci. Eng. 2020, 8, 698. [Google Scholar] [CrossRef]
- Grue, J. Nonlinear water waves at a submerged obstacle or bottom topography. J. Fluid Mech. 1992, 244, 455–476. [Google Scholar] [CrossRef]
- Lin, H.-X.; Ning, D.-Z.; Zou, Q.-P.; Teng, B.; Chen, L.-F. Current effects on nonlinear wave scattering by a submerged plate. J. Waterw. Port Coast. Ocean Eng. 2014, 140, 04014016. [Google Scholar] [CrossRef]
- Ning, D.; Chen, L.; Lin, H.; Zou, Q.; Teng, B. Interaction mechanisms among waves, currents and a submerged plate. Appl. Ocean Res. 2019, 91, 101911. [Google Scholar] [CrossRef]
- Nallayarasu, S.; Cheong, H.F.; Shankar, N.J. Wave induced pressures and forces on a fixed submerged inclined plate. Finite Elem. Anal. Des. 1994, 18, 289–299. [Google Scholar] [CrossRef]
- Gayen, R.; Mondal, A. Water wave interaction with two symmetric inclined permeable plates. Ocean Eng. 2016, 124, 180–191. [Google Scholar] [CrossRef]
- Murakami, H.; Itoh, S.; Hosoi, Y.; Sawamura, Y. Wave induced flow around submerged sloping plates. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994. [Google Scholar]
- Rao, S.; Shirlal, K.G.; Varghese, R.V.; Govindaraja, K.R. Physical model studies on wave transmission of a submerged inclined plate breakwater. Ocean Eng. 2009, 36, 1199–1207. [Google Scholar] [CrossRef]
- Ning, D.Z.; Zang, J.; Liu, S.X.; Eatock Taylor, R.; Teng, B.; Taylor, P.H. Free-surface evolution and wave kinematics for nonlinear uni-directional focused wave groups. Ocean Eng. 2009, 36, 1226–1243. [Google Scholar] [CrossRef]
- Baddour, R.E.; Song, S.W. Interaction of higher-order water waves with uniform currents. Ocean Eng. 1990, 17, 551–568. [Google Scholar] [CrossRef]
- Hunt, J.N. Direct solution of wave dispersion equation. J. Waterw. Port Coast. Ocean Div. 1979, 105, 457–459. [Google Scholar] [CrossRef]
- Bai, W.; Eatock Taylor, R. Higher-order boundary element simulation of fully nonlinear wave radiation by oscillating vertical cylinders. Appl. Ocean Res. 2006, 28, 247–265. [Google Scholar] [CrossRef]
- Ning, D.Z.; Teng, B. Numerical simulation of fully nonlinear irregular wave tank in three dimension. Int. J. Numer. Methods Fluids 2007, 53, 1847–1862. [Google Scholar] [CrossRef]
- Goda, Y.; Suzuki, Y. Estimation of incident and reflected waves in random wave experiments. Coast. Eng. 1976, 48, 828–845. [Google Scholar] [CrossRef]
- Mansard, E.; Funke, E. The measurement of incident and reflected spectra using a least squares method. In Proceedings of the 17th International Conference on Coastal Engineering, Sydney, Australia, 23–28 March 1980; ASCE Library: Reston, VA, USA, 1980; pp. 154–172. [Google Scholar] [CrossRef]
- Mansard, E.; Sand, S.; Funke, E. Reflection Analysis of Non-Linear Regular Waves; Hydraul. Lab. Technol. Rep. TR-HY-011; National Research Council: Ottawa, ON, Canada, 1985; 38p. [Google Scholar]
- Lin, C.-Y.; Huang, C.-J. Decomposition of incident and reflected higher harmonic waves using four wave gauges. Coast. Eng. 2004, 51, 395–406. [Google Scholar] [CrossRef]
- Faraci, C.; Scandura, P.; Foti, E. Reflection of Sea Waves by Combined Caissons. J. Waterw. Port Coast. Ocean Eng. 2015, 141, 04014036. [Google Scholar] [CrossRef]
- Ning, D.; Li, Q.; Lin, H.; Teng, B. Numerical investigation of nonlinear wave scattering by a horizontal submerged plate. Procedia Eng. 2015, 116, 237–244. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| α (°) | kt [23] | kt (Present) | Error (%) | kr [23] | kr (Present) | Error (%) | [23] | |
|---|---|---|---|---|---|---|---|---|
| 0 | 0.9946 | 0.9890 | 0.5650 | 0.1386 | 0.1513 | 9.2169 | 1.0084 | 1.0010 |
| 10 | 0.9930 | 09882 | 0.4854 | 0.1441 | 0.1571 | 9.0423 | 1.0069 | 1.0012 |
| 20 | 0.9912 | 0.9858 | 0.5408 | 0.1586 | 0.1719 | 8.3333 | 1.0076 | 1.0014 |
| 30 | 0.9867 | 0.9813 | 0.5493 | 0.1849 | 0.1964 | 6.2355 | 1.0078 | 1.0015 |
| 40 | 0.9799 | 0.9739 | 0.6072 | 0.2209 | 0.2307 | 4.4360 | 1.0089 | 1.0017 |
| 50 | 0.9680 | 0.9626 | 0.5599 | 0.2662 | 0.2745 | 3.1223 | 1.0078 | 1.0019 |
| 60 | 0.9527 | 0.9471 | 0.5794 | 0.3186 | 0.3224 | 1.2054 | 1.0090 | 1.0010 |
| 70 | 0.9349 | 0.9294 | 0.5851 | 0.3693 | 0.3705 | 0.3385 | 1.0103 | 1.0011 |
| 80 | 0.9190 | 0.9142 | 0.5233 | 0.4055 | 0.4059 | 0.1036 | 1.0090 | 1.0005 |
| Case | ka | α |
|---|---|---|
| Case 1 | 0.075 | 0~80° |
| Case 2 | 0.094 | 0~80° |
| Case 3 | 0.113 | 0~80° |
| Case 4 | 0.075~0.113 | 20° |
| Case 5 | 0.075~0.113 | 30° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Sun, Y.; Chen, L.; Ning, D.; Wojciech, S. Numerical Investigation on Higher-Order Harmonic Waves Induced by a Submerged Inclined Plate. J. Mar. Sci. Eng. 2022, 10, 1115. https://doi.org/10.3390/jmse10081115
Zhou Z, Sun Y, Chen L, Ning D, Wojciech S. Numerical Investigation on Higher-Order Harmonic Waves Induced by a Submerged Inclined Plate. Journal of Marine Science and Engineering. 2022; 10(8):1115. https://doi.org/10.3390/jmse10081115
Chicago/Turabian StyleZhou, Zhimin, Yawei Sun, Lifen Chen, Dezhi Ning, and Sulisz Wojciech. 2022. "Numerical Investigation on Higher-Order Harmonic Waves Induced by a Submerged Inclined Plate" Journal of Marine Science and Engineering 10, no. 8: 1115. https://doi.org/10.3390/jmse10081115