


Wave Motion and Seabed Response around a Vertical Structure Sheltered by Submerged Breakwaters with Fabry–Pérot Resonance

 ,
,
Abstract
:1. Introduction
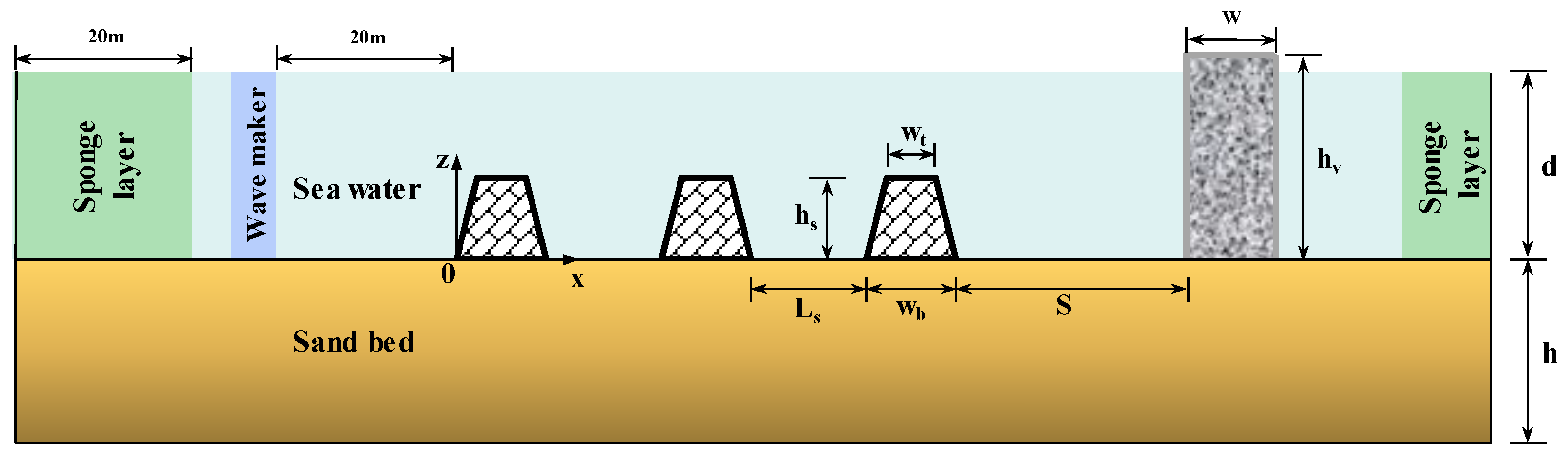
2. Numerical Model
2.1. Wave Sub-Model
2.2. Seabed Sub-Model
2.3. Boundary Conditions
2.4. Numerical Scheme
3. Model Validation
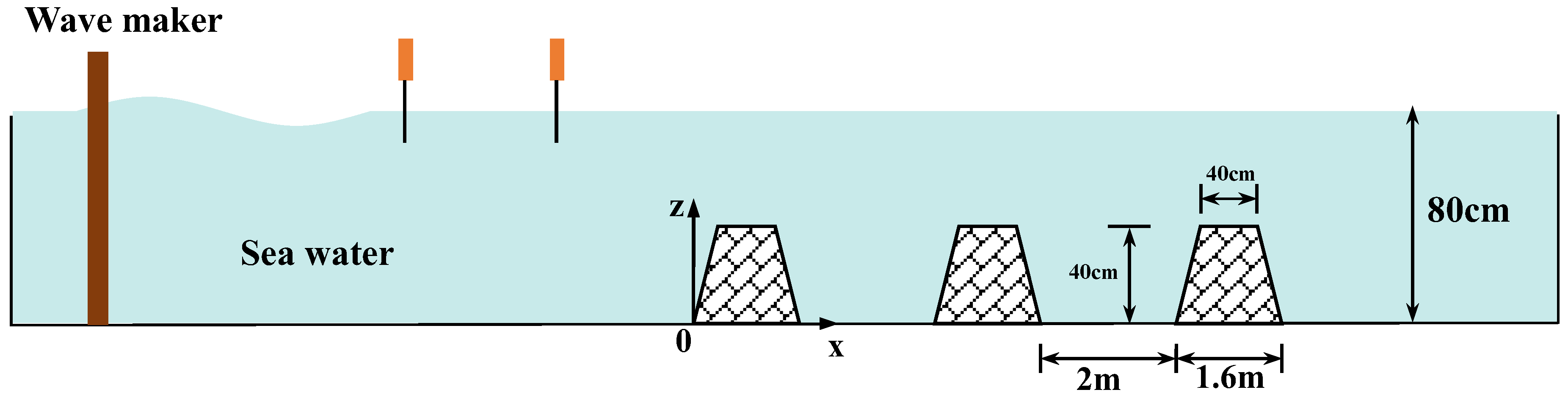
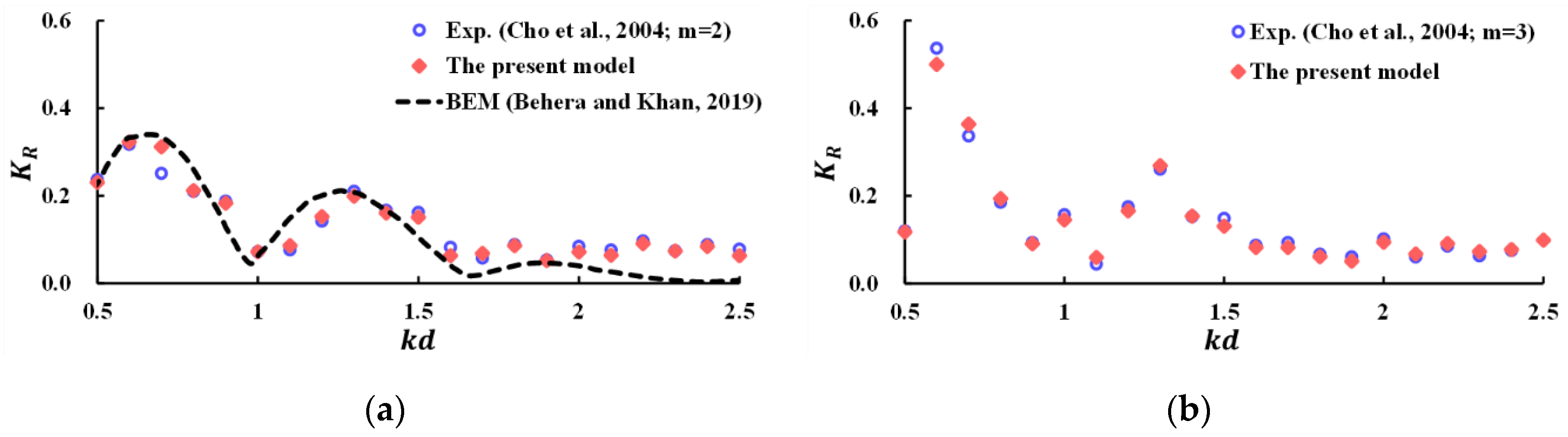
3.1. Validation for the Wave Reflection
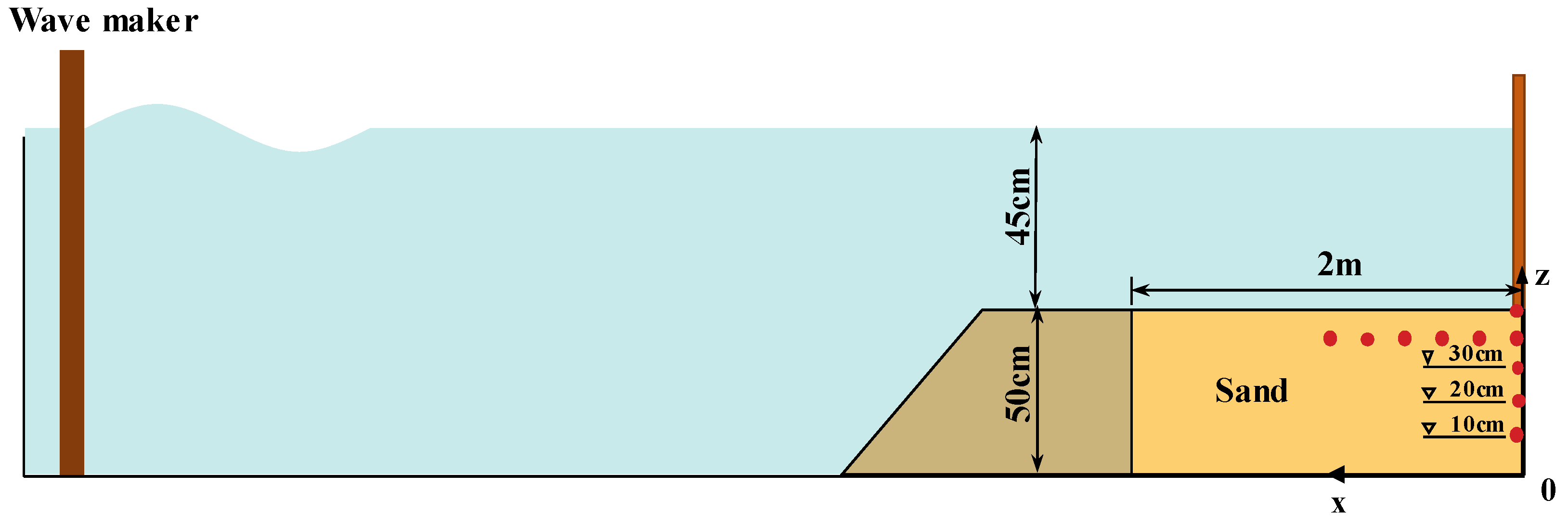
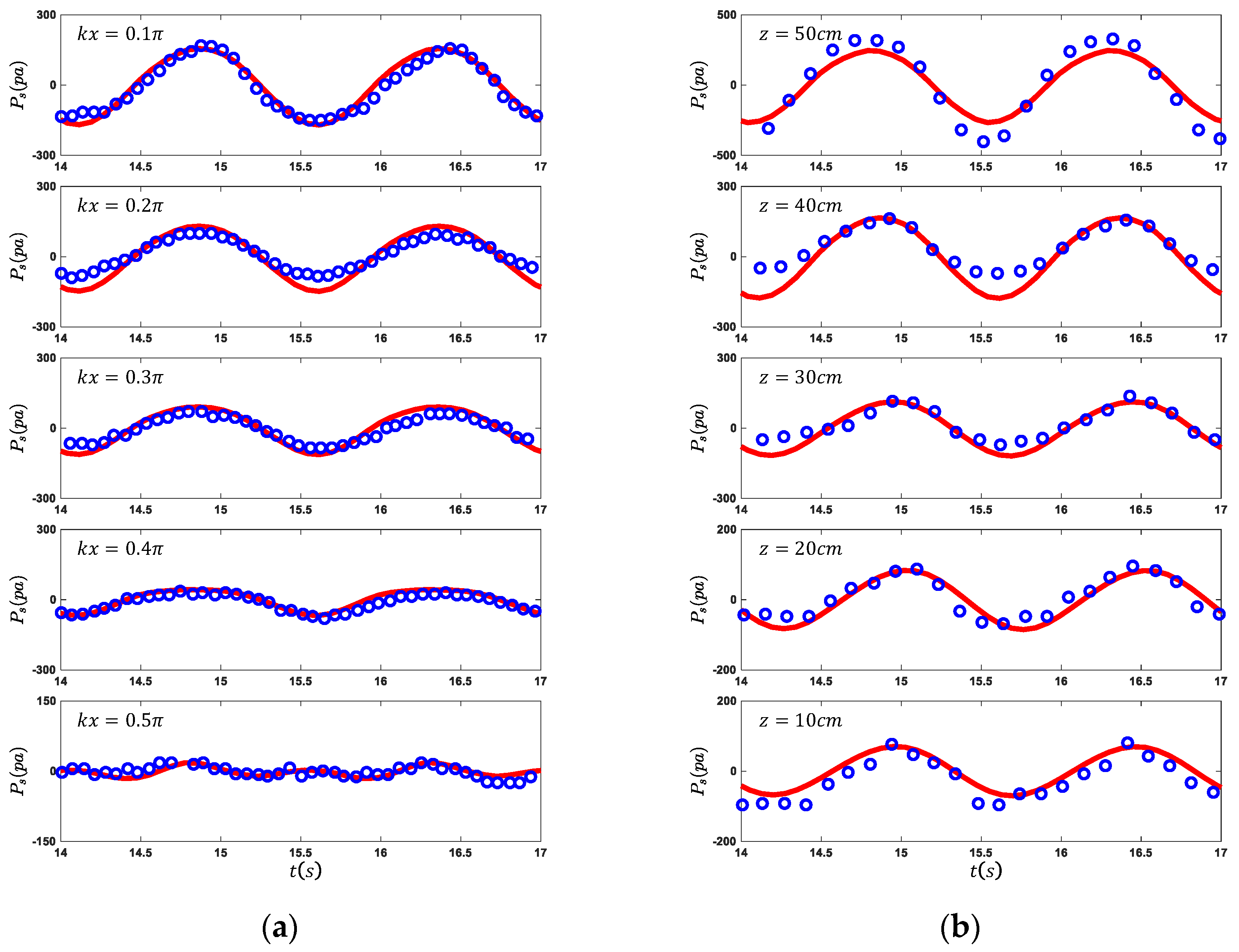
3.2. Validation for the Seabed Response
4. Results
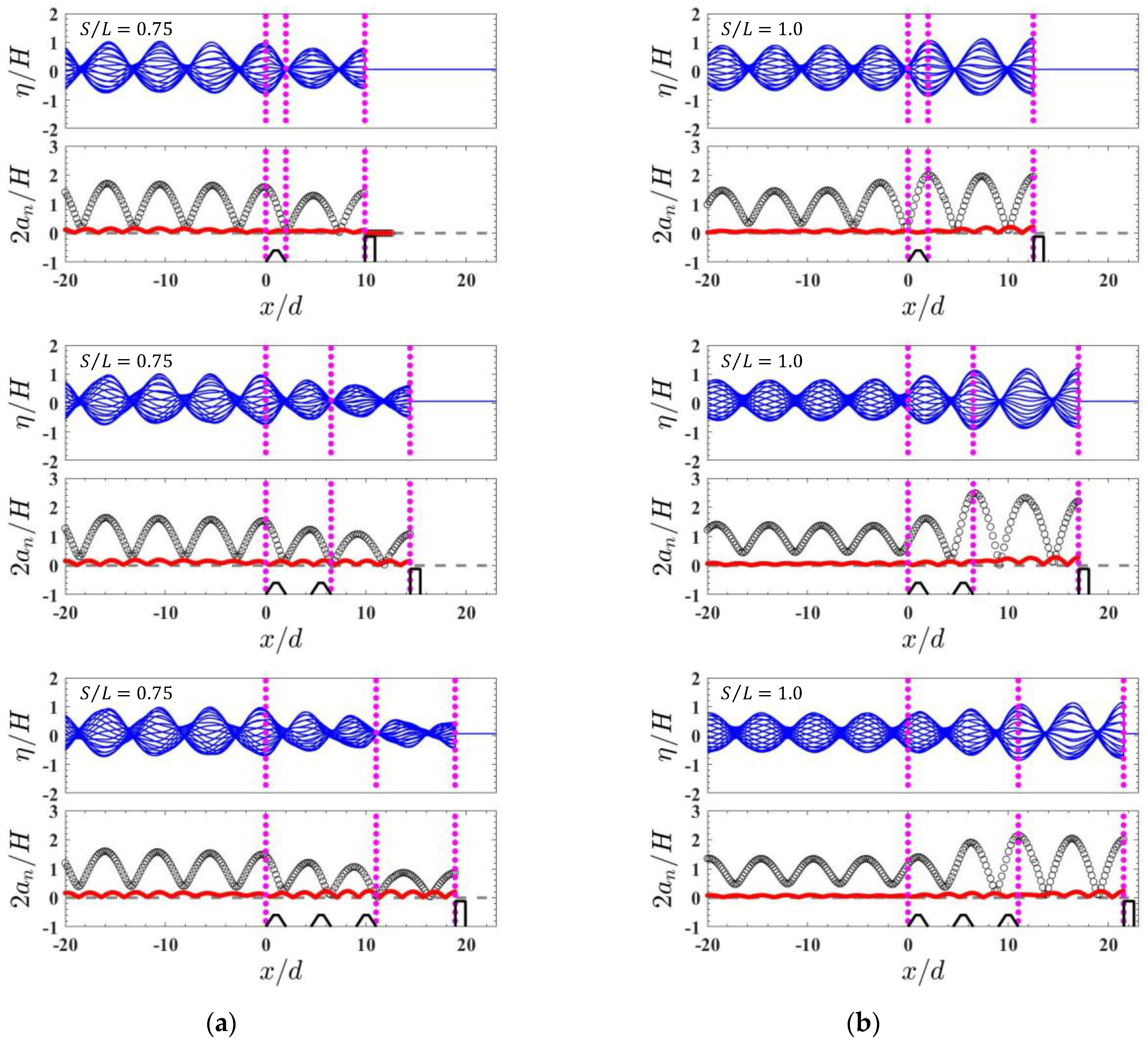
4.1. Wave Transformation
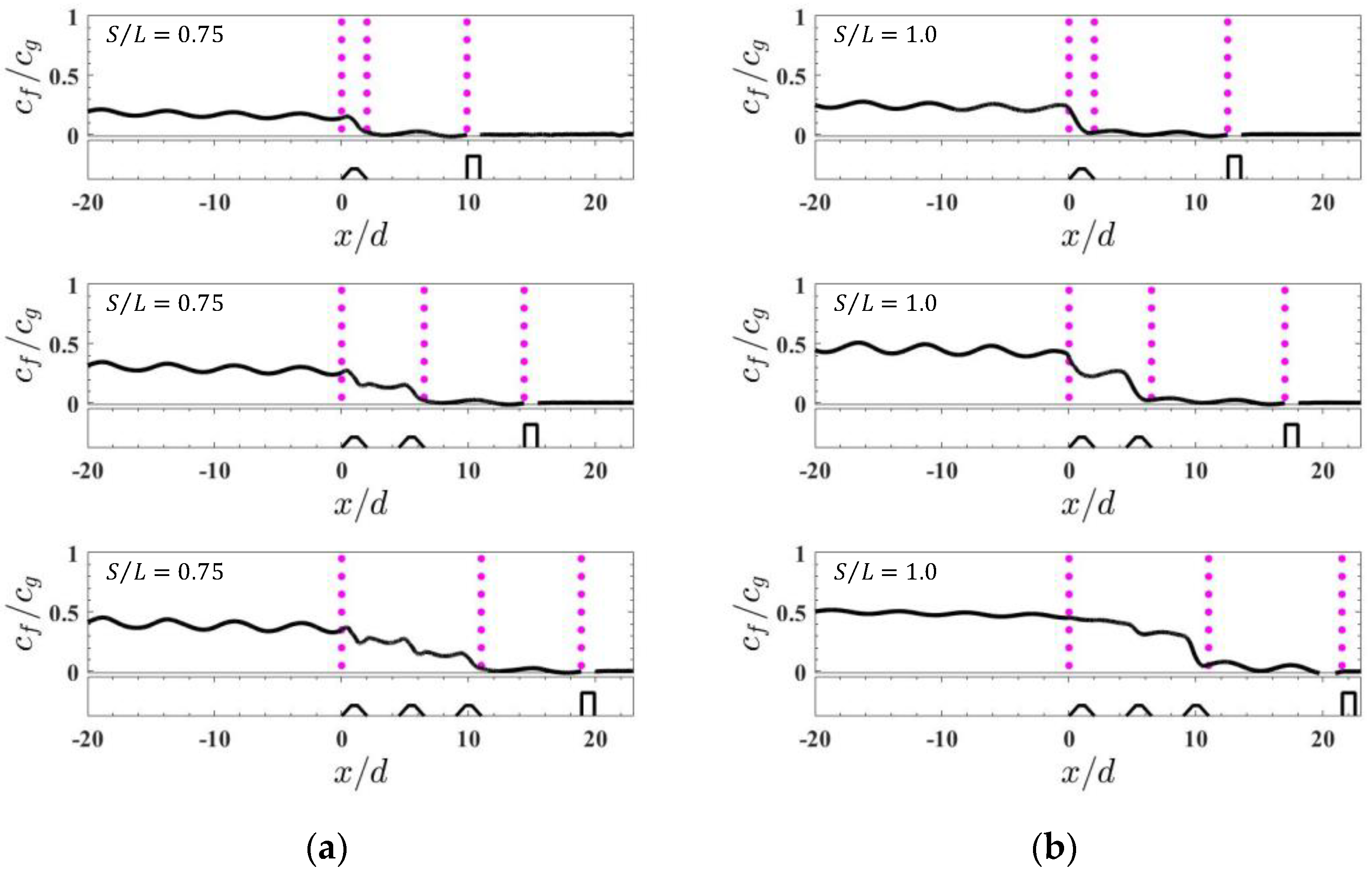
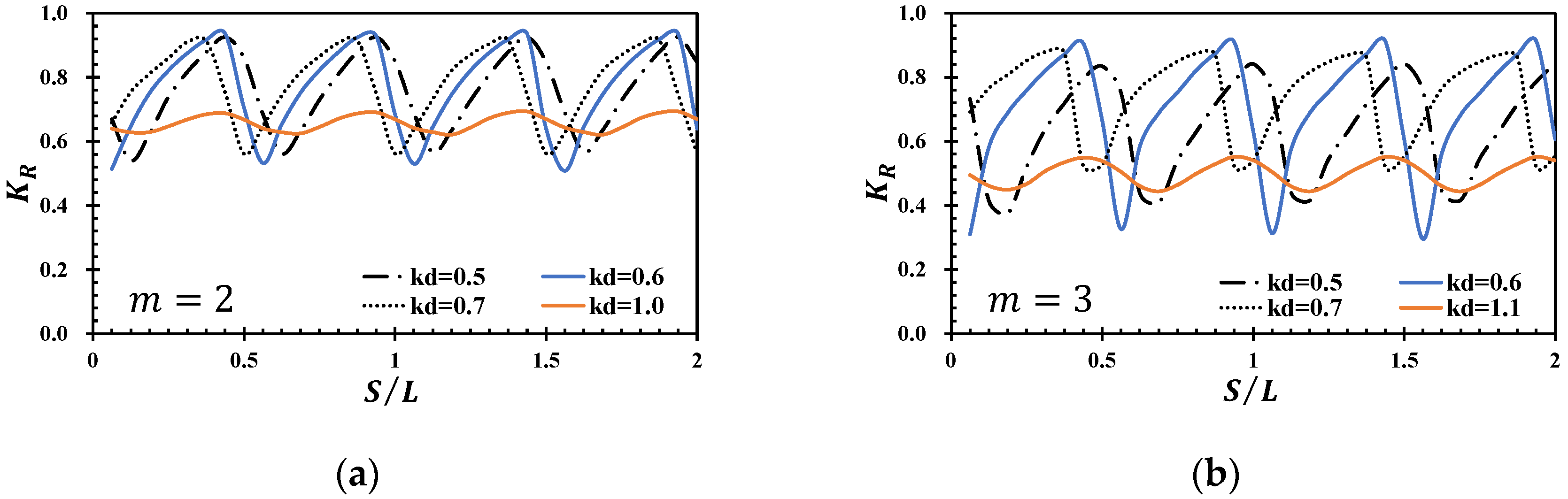
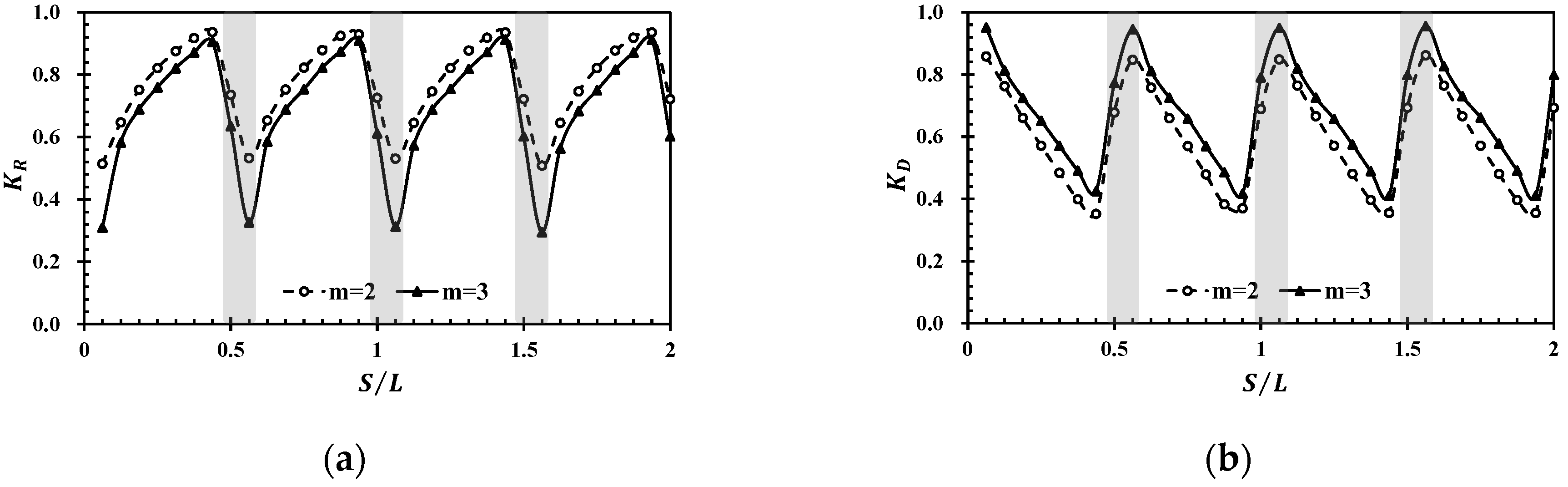
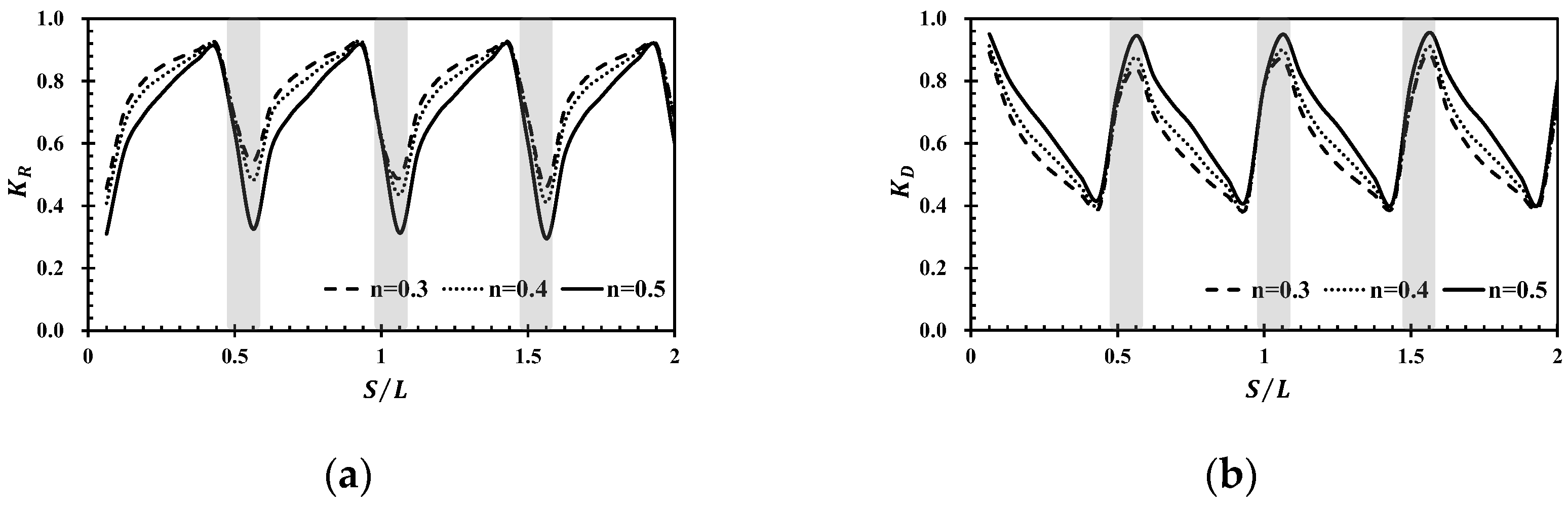
4.2. Wave Reflection and Dissipation Coefficients
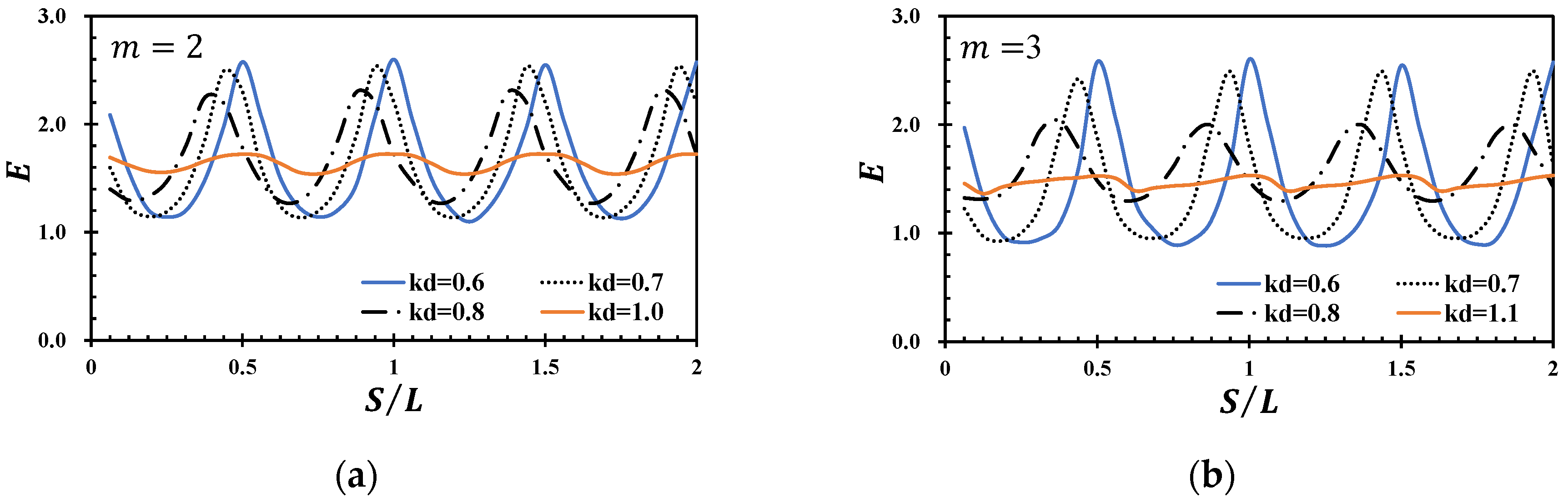
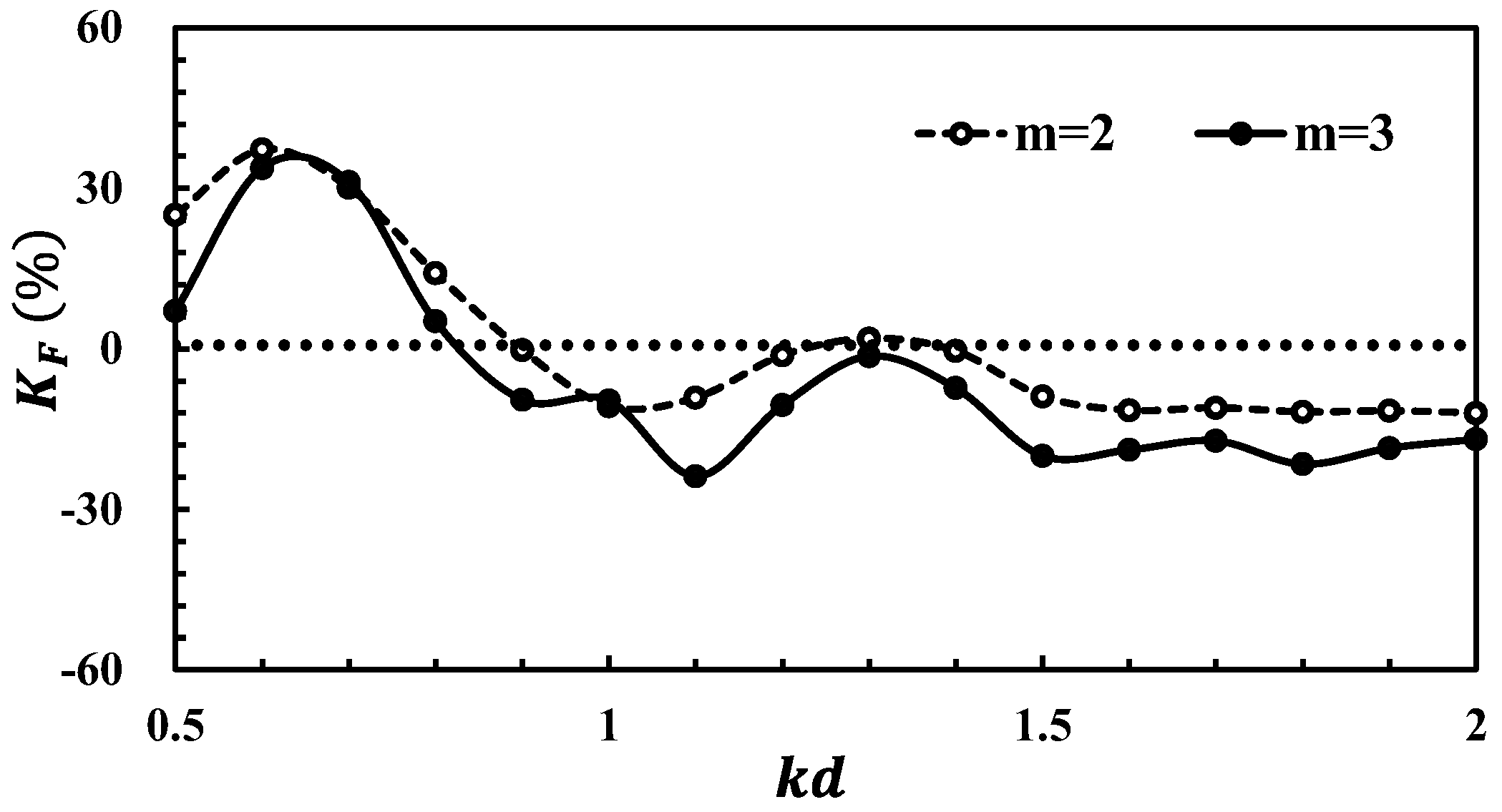
4.3. Enhancement Coefficient
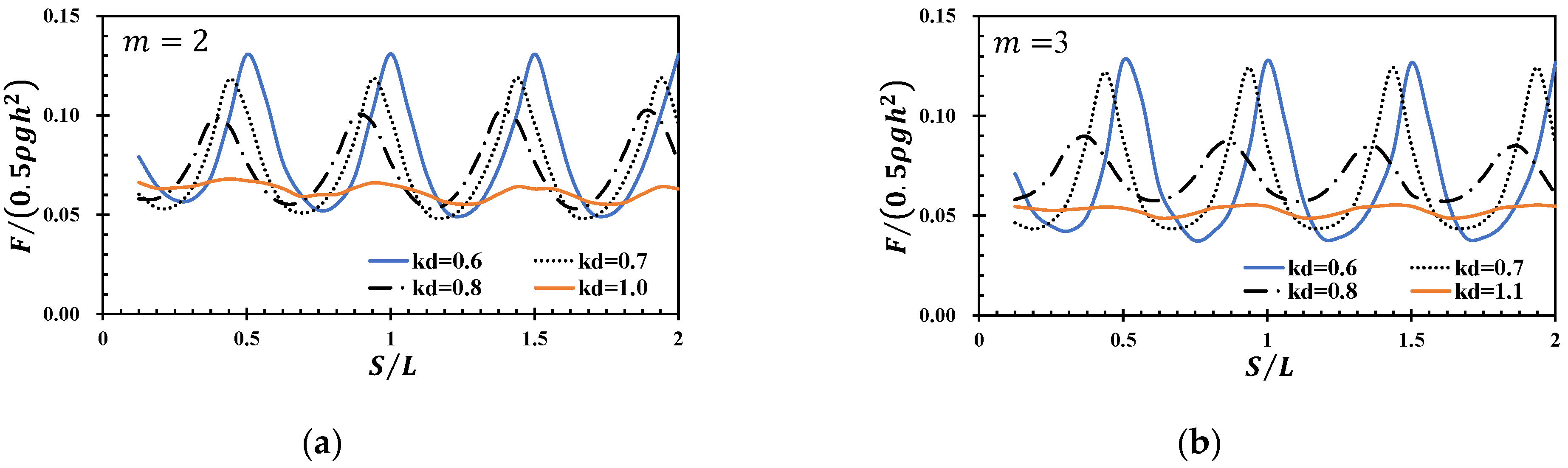
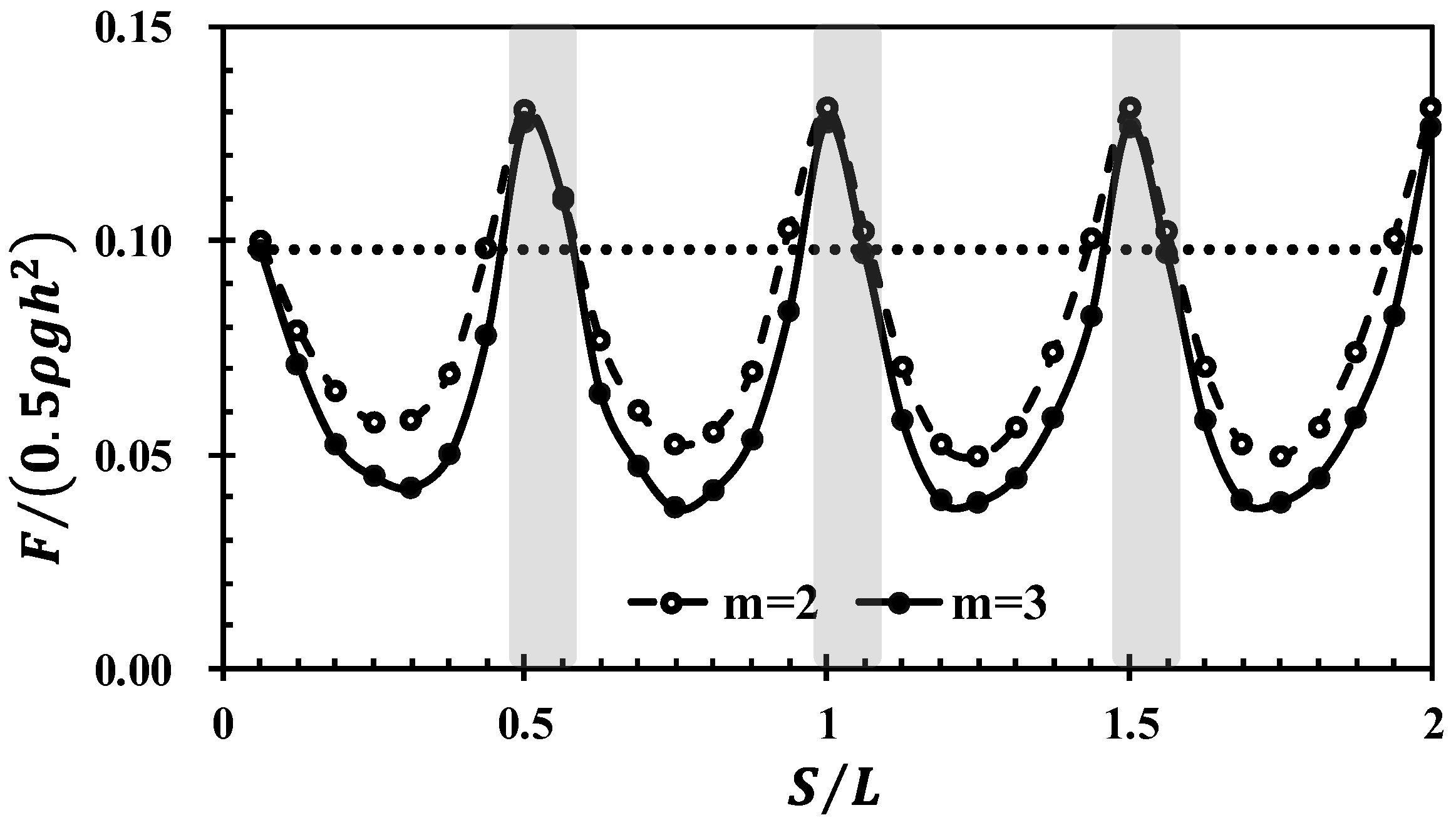
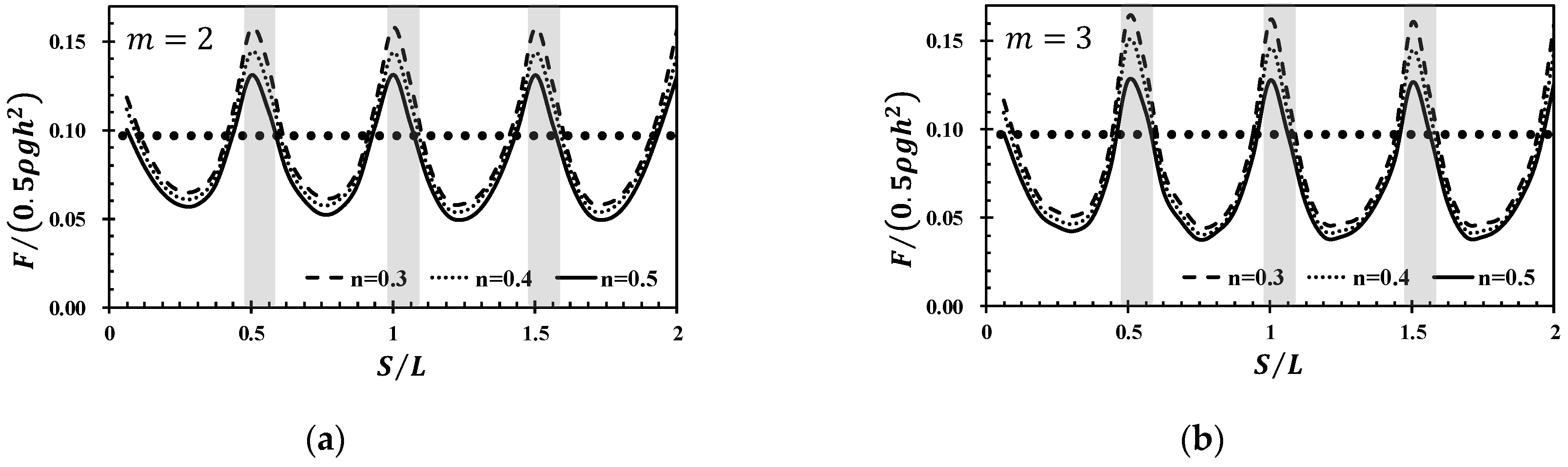
4.4. Pressure Drag
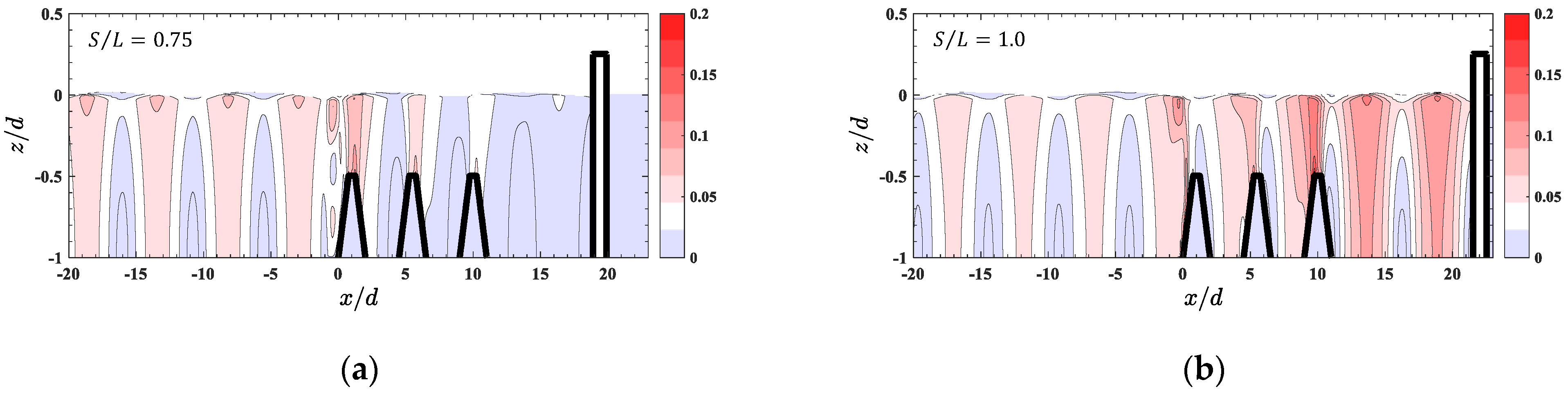
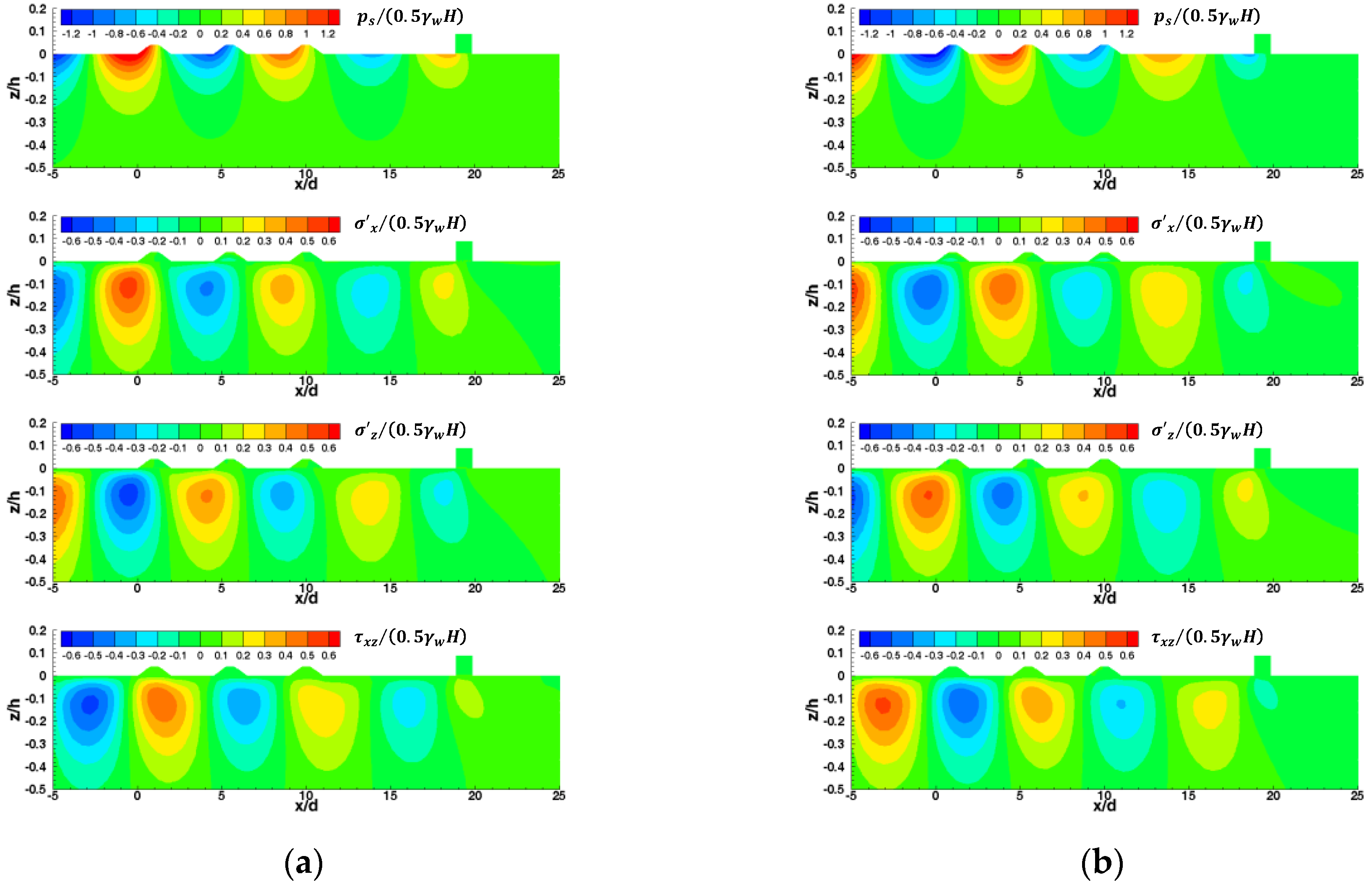
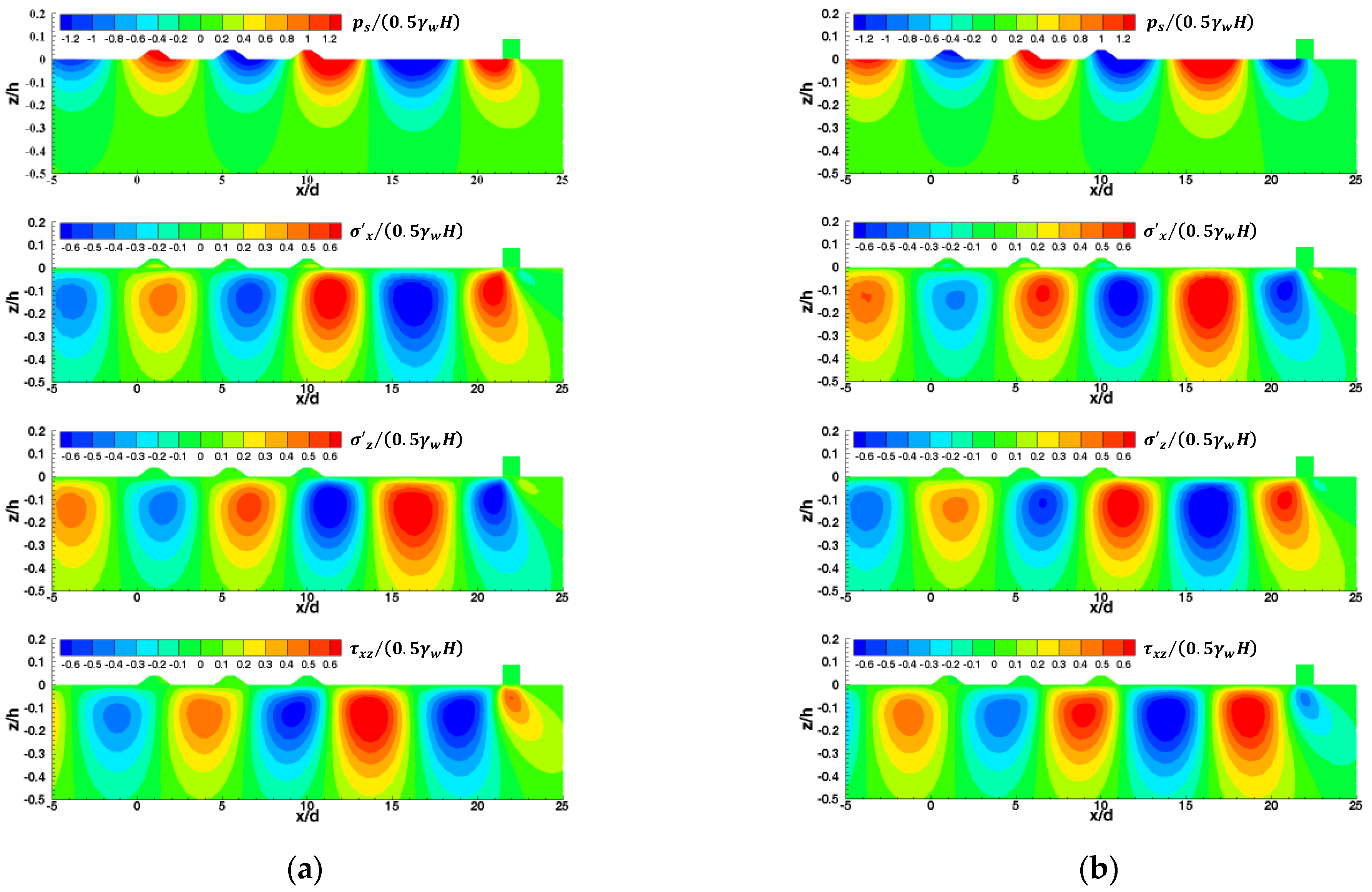
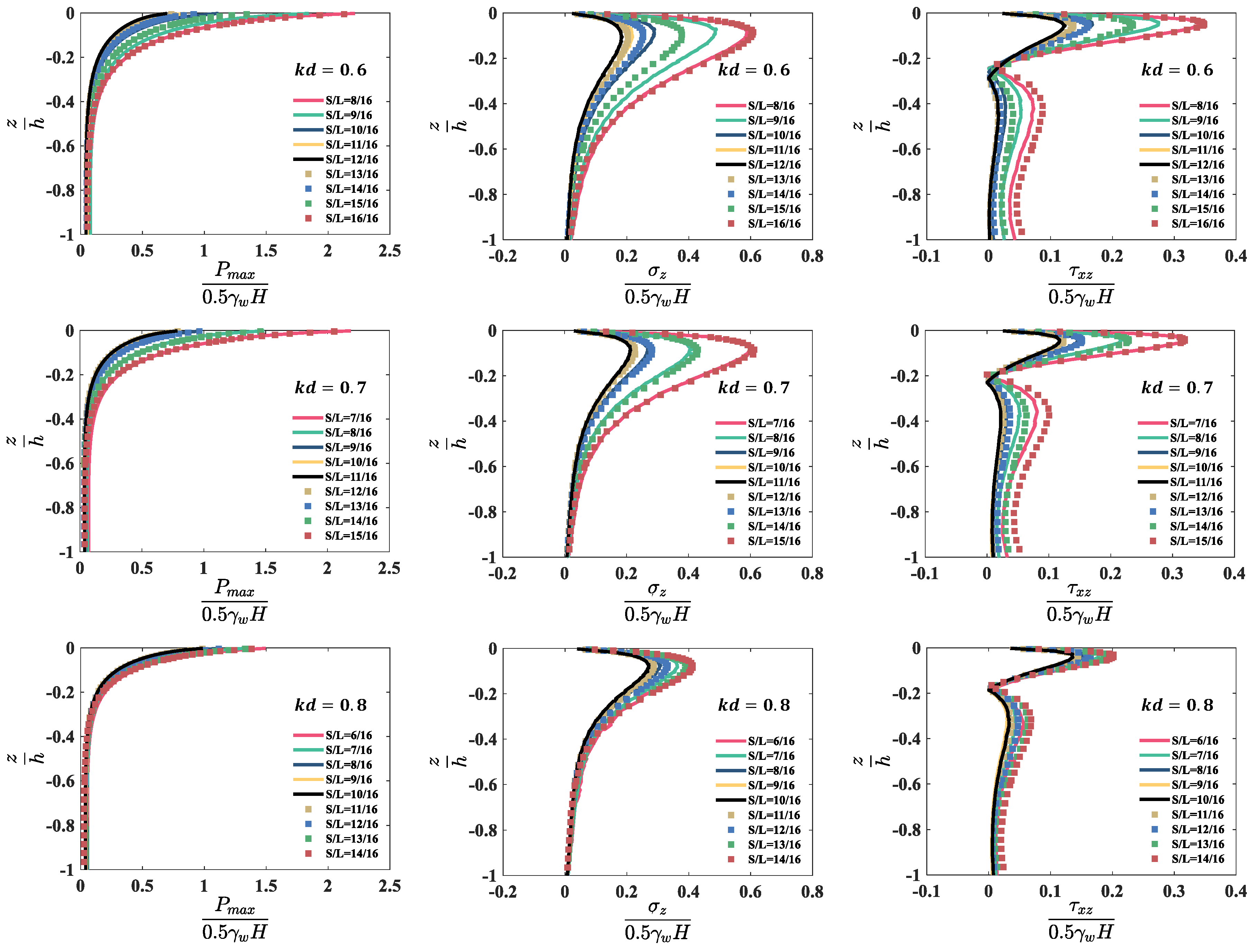
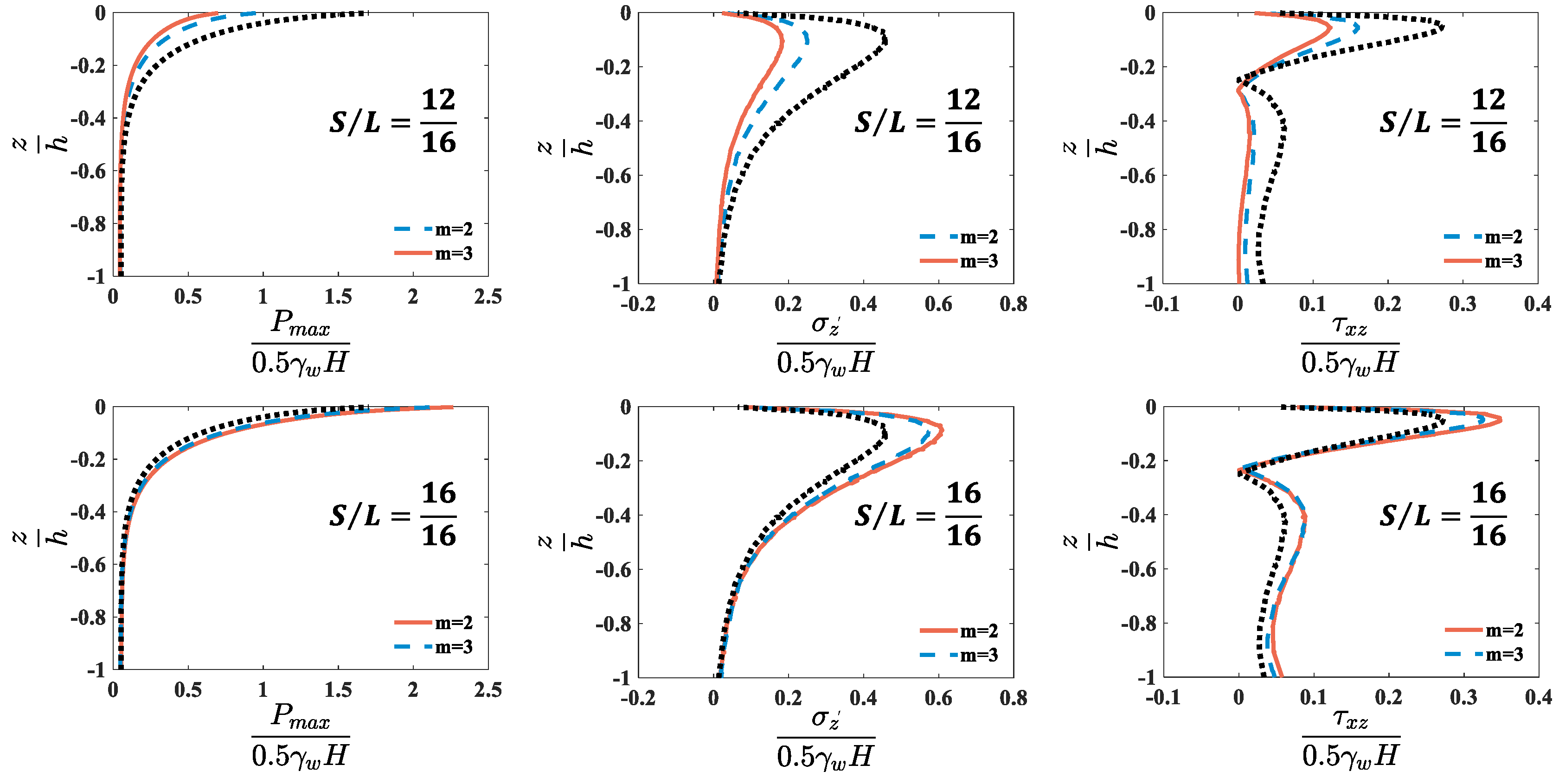
4.5. Dynamic Response of the Seabed
4.6. Liquefaction
5. Conclusions
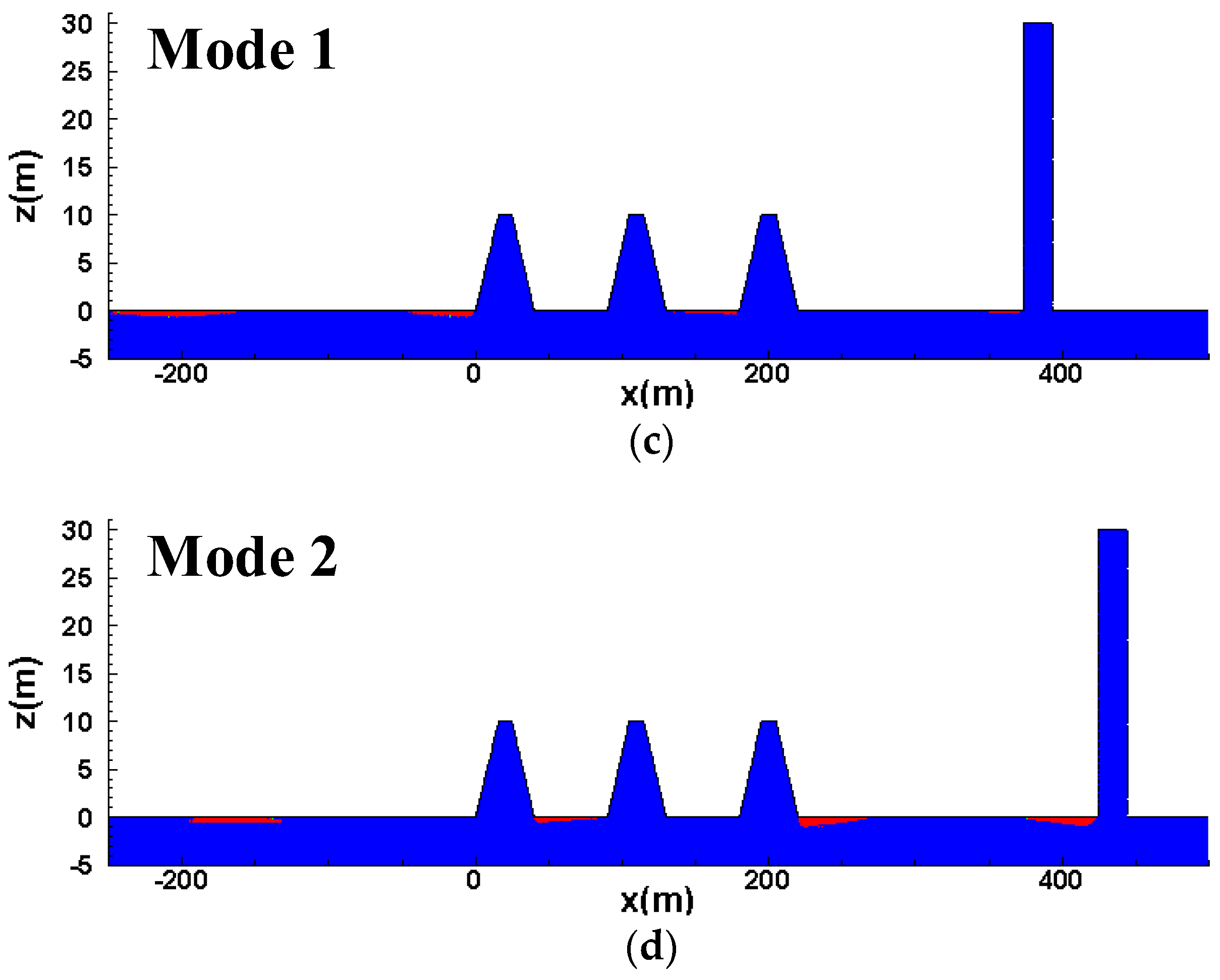
- The presence of the submerged breakwaters in front of the vertical breakwater can either provide shelter or worsen the hazards, depending on the condition of the vertical breakwater reflection. The relative distance between the breakwaters determines how the wave energy is transferred locally, and the two Modes of wave transformation can be clarified: wave reflection and wave trapping. Reflection and dissipation of wave energy by frontal submerged breakwaters cause the magnitude of the flow velocity to decrease under Mode 1, and trapping of wave energy cause the magnitude to increase under Mode 2, at the back side of the submerged breakwaters;
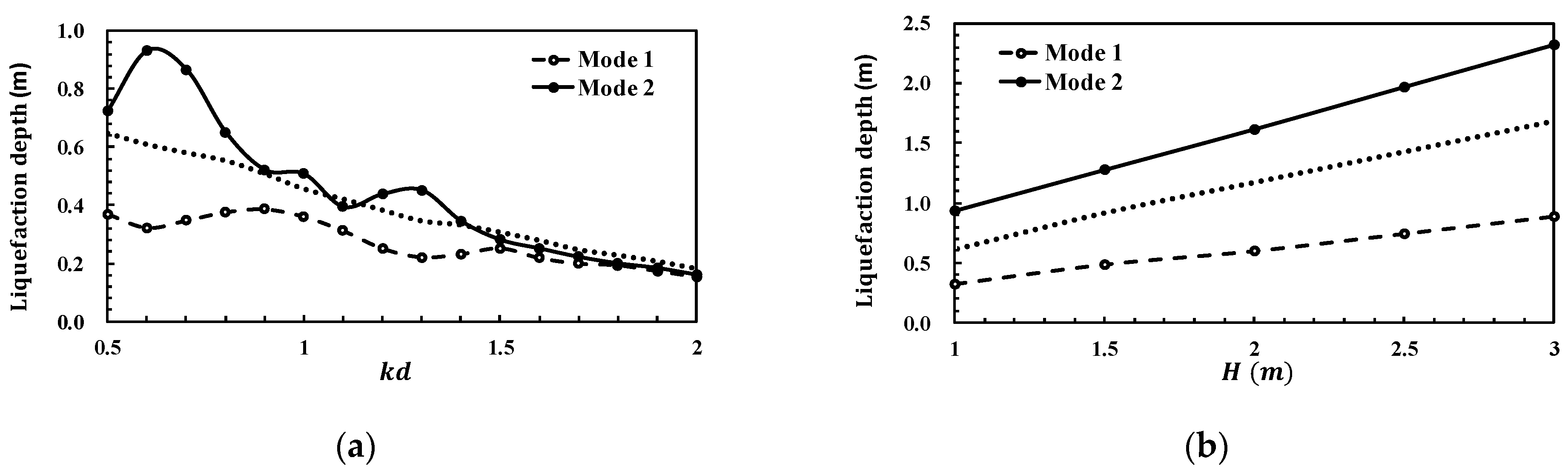
- Trapping more wave energy under the F–P resonance condition leads to a smaller reflection coefficient, but also to a larger dissipation, enhancement coefficients, wave force, wave-induced pore pressure, and dynamic stresses. The presence of the submerged breakwaters tends to enhance the wave force and the potential of the maximum liquefaction depth in the vicinity of the vertical breakwater, comparing this with the case with the vertical breakwater condition, only;
- With the consideration of the bottom friction and the viscous dissipation, the reflection and dissipation coefficients are out of phase with the enhancement coefficient;
- The enhancement coefficient is in phase with the wave force, the wave-induced pore pressure, and the dynamic stresses. A strong amplification or damping is achieved. The optimal distance is for the Bragg resonance period, and the shifts to the left with the increase of . With the greater detuning frequency, the reflection and dissipation of the breakwaters are more important than the F–P resonance;
- The result reveals that triple submerged breakwaters with a high porosity is the most effective configuration in reducing the wave energy and to shelter the backward structure. The dissipation coefficient becomes larger as the presence of an additional submerged breakwater, hence the forced action on the vertical breakwater, the dynamic stresses, and the maximum liquefaction depth around the vertical breakwater, become smaller, especially under Mode 1. Increasing the porosity of the submerged breakwaters can also induce more significantly wave dissipation. Following a full wave-structure interaction, the magnitude of the wave force and the dynamic stresses within the seabed decreases with the increase of the porosity of the submerged breakwaters, especially under Mode 2.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jeng, D.-S.; Schacht, C.; Lemckert, C. Experimental Study on Ocean Waves Propagating over a Submerged Breakwater in Front of a Vertical Seawall. Ocean Eng. 2005, 32, 2231–2240. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Zang, J.; Dong, G.; Ma, X.; Zhu, Y.; Zhou, L. Numerical Investigation of Harbor Oscillations Induced by Focused Transient Wave Groups. Coast. Eng. 2020, 158, 103670. [Google Scholar] [CrossRef]
- Heathershaw, A.D. Seabed-Wave Resonance and Sand Bar Growth. Nature 1982, 296, 343–345. [Google Scholar] [CrossRef]
- Mei, C.C. Resonant Reflection of Surface Water Waves by Periodic Sandbars. J. Fluid Mech. 1985, 152, 315–335. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Dong, G.; Chen, H.; Liu, Q.; Zang, J. Investigation on the Effects of Bragg Reflection on Harbor Oscillations. Coast. Eng. 2021, 170, 103977. [Google Scholar] [CrossRef]
- Behera, H.; Khan, M.B.M. Numerical Modeling for Wave Attenuation in Double Trapezoidal Porous Structures. Ocean Eng. 2019, 184, 91–106. [Google Scholar] [CrossRef]
- Davies, A.G.; Heathershaw, A.D. Surface-Wave Propagation over Sinusoidally Varying Topography. J. Fluid Mech. 1984, 144, 419–443. [Google Scholar] [CrossRef]
- Liu, Y.; Yue, D.K.P. On Generalized Bragg Scattering of Surface Waves by Bottom Ripples. J. Fluid Mech. 1998, 356, 297–326. [Google Scholar] [CrossRef]
- Mase, H.; Oki, K.; Kitano, T.; Mishima, T. Experiments on Bragg Scattering of Waves due to Submerged Breakwaters. Coast. Struct. 2000, 99, 659–665. [Google Scholar]
- Cho, Y.-S.; Yoon, S.B.; Lee, J.-I.; Yoon, T.-H. A Concept of Beach Protection with Submerged Breakwaters. J. Coast. Res. 2001, 34, 671–678. [Google Scholar]
- Cho, Y.-S.; Lee, J.-I.; Kim, Y.-T. Experimental Study of Strong Reflection of Regular Water Waves over Submerged Breakwaters in Tandem. Ocean Eng. 2004, 31, 1325–1335. [Google Scholar] [CrossRef]
- Jeon, C.-H.; Cho, Y.-S. Bragg Reflection of Sinusoidal Waves Due to Trapezoidal Submerged Breakwaters. Ocean Eng. 2006, 33, 2067–2082. [Google Scholar] [CrossRef]
- Zhang, J.-S.; Jeng, D.-S.; Liu, P.L.-F.; Zhang, C.; Zhang, Y. Response of a Porous Seabed to Water Waves over Permeable Submerged Breakwaters with Bragg Reflection. Ocean Eng. 2012, 43, 1–12. [Google Scholar] [CrossRef]
- Kirby, J.T.; Anton, J.P. Bragg Reflection of Waves by Artificial Bars. Coast. Eng. 1990, 1991, 757–768. [Google Scholar] [CrossRef]
- Yu, J.; Mei, C.C. Do Longshore Bars Shelter the Shore? J. Fluid Mech. 2000, 404, 251–268. [Google Scholar] [CrossRef]
- Couston, L.-A.; Guo, Q.; Chamanzar, M.; Alam, M.-R. Fabry-Perot Resonance of Water Waves. Phys. Rev. E 2015, 92, 043015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Terrett, F.L.; Osorio, J.D.C.; Lean, G.H. Model Studies of a Perforated Breakwater. In Coastal Engineering 1968; American Society of Civil Engineers: London, UK, 1969; pp. 1104–1120. [Google Scholar] [CrossRef]
- Chwang, A.T. A Porous-Wavemaker Theory. J. Fluid Mech. 1983, 132, 395–406. [Google Scholar] [CrossRef]
- Jeng, D.-S.; Ye, J.-H.; Zhang, J.-S.; Liu, P.L.-F. An Integrated Model for the Wave-Induced Seabed Response around Marine Structures: Model Verifications and Applications. Coast. Eng. 2013, 72, 1–19. [Google Scholar] [CrossRef]
- Sumer, B.M. Liquefaction around Marine Structures; Advanced Series on Ocean Engineering; World Scientific: Singapore; Hackensack, NJ, USA, 2014. [Google Scholar]
- Lin, Z.; Guo, Y.; Jeng, D.; Liao, C.; Rey, N. An Integrated Numerical Model for Wave–Soil–Pipeline Interactions. Coast. Eng. 2016, 108, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Zhai, Y.; Zhang, J.; Jiang, L.; Xie, Q.; Chen, H. Experimental Study of Wave Motion and Pore Pressure Around a Submerged Impermeable Breakwater in a Sandy Seabed. Int. J. Offshore Polar Eng. 2018, 28, 87–95. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, L.; Zheng, J.; He, R.; Guo, Y. Effects of Soil-Resistance Damping on Wave-Induced Pore Pressure Accumulation around a Composite Breakwater. J. Coast. Res. 2018, 34, 573. [Google Scholar] [CrossRef]
- Mizutani, N.; Mostafa, A.M. Nonlinear Wave-Induced Seabed Instability Around Coastal Structures. Coast. Eng. J. 1998, 40, 131–160. [Google Scholar] [CrossRef]
- Hur, D.-S.; Kim, C.-H.; Kim, D.-S.; Yoon, J.-S. Simulation of the Nonlinear Dynamic Interactions between Waves, a Submerged Breakwater and the Seabed. Ocean Eng. 2008, 35, 511–522. [Google Scholar] [CrossRef]
- Zhang, J.-S.; Jeng, D.-S.; Liu, P.L.-F. Numerical Study for Waves Propagating over a Porous Seabed around a Submerged Permeable Breakwater: PORO-WSSI II Model. Ocean Eng. 2011, 38, 954–966. [Google Scholar] [CrossRef]
- Tsai, C.-P.; Lee, T.-L. Standing Wave Induced Pore Pressures in a Porous Seabed. Ocean Eng. 1995, 22, 505–517. [Google Scholar] [CrossRef]
- Tong, L.; Zhang, J.; Zhao, J.; Zheng, J.; Guo, Y. Modelling Study of Wave Damping over a Sandy and a Silty Bed. Coast. Eng. 2020, 161, 103756. [Google Scholar] [CrossRef]
- Hsu, T.-J.; Sakakiyama, T.; Liu, P.L.-F. A Numerical Model for Wave Motions and Turbulence Flows in Front of a Composite Breakwater. Coast. Eng. 2002, 46, 25–50. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.-F. A Numerical Study of Breaking Waves in the Surf Zone. J. Fluid Mech. 1998, 359, 239–264. [Google Scholar] [CrossRef]
- Andersen, O.H. Flow in Porous Media with Special Reference to Breakwater Structures. Ph.D. Thesis, Hydraulics & Coastal Engineering Laboratory, Department of Civil Engineering, Aalborg University, Aalborg, Denmark, 1994. [Google Scholar]
- Fair, G.M. Water and Wastewater Engineering; Volume 2. Water Purification and Wastewater Treatment and Disposal; Wiley: New York, NY, USA, 1968. [Google Scholar]
- Kozeny, J. Ueber Kapillare Leitung Des Wassers Im Boden. Stizungsber Akad. Wiss., Wien,. 1927, 136, 271–306. [Google Scholar]
- Liu, P.L.-F.; Lin, P.; Chang, K.-A.; Sakakiyama, T. Numerical Modeling of Wave Interaction with Porous Structures. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 322–330. [Google Scholar] [CrossRef]
- Lin, P.; Karunarathna, S.A. Numerical Study of Solitary Wave Interaction with Porous Breakwaters. J. Waterw. Port Coast. Ocean Eng. 2007, 133, 352–363. [Google Scholar] [CrossRef] [Green Version]
- Zienkiewicz, O.C.; Chang, C.T.; Bettess, P. Drained, Undrained, Consolidating and Dynamic Behaviour Assumptions in Soils. Geotechnique 1980, 30, 385–395. [Google Scholar] [CrossRef]
- Richart, F.E.; Hall, J.R.; Woods, R.D. Vibrations of Soils and Foundations; Prentice Hall: Englewood Cliffs, NJ, USA, 1970. [Google Scholar]
- Salgado, R.; Bandini, P.; Karim, A. Shear Strength and Stiffness of Silty Sand. J. Geotech. Geoenviron. Eng. 2000, 126, 451–462. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Goda, Y.; Suzuki, Y. Estimation of Incident and Reflected Waves in Random Wave Experiments. Coast. Eng. 1976, 1, 47. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Liu, P.L.-F. Internal Wave-Maker for Navier-Stokes Models. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 207–215. [Google Scholar] [CrossRef]
- Mei, C.C.; Stiassnie, M.A.; Yue, D.K.P. Theory and Application of Ocean Surface Waves; World Scientific: Singapore, 2005. [Google Scholar]
- Okusa, S. Wave-Induced Stresses in Unsaturated Submarine Sediments. Geotechnique 1985, 35, 517–532. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mediums | Parameters | ||
|---|---|---|---|
| Wave | Wave height (m) | H | 0.04 |
| Wave period (s) | T | 1.29~3.73 | |
| Seabed | Porosity | ns | 0.3 |
| Thickness (m) | h | 10 | |
| Permeability (m/s) | K | 10−3 | |
| Degree of saturation | Sr | 1.0 | |
| Poisson’s ratio | 1/3 | ||
| Submerged breakwater | Porosity | n | 0.3~0.5 |
| Mean grain size (m) | d50 | 0.076 | |
| Shear modulus (N/m2) | G | 109 | |
| Poisson’s ratio | 1/3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, L.; Zhang, J.; Tong, L.; Guo, Y.; He, R.; Sun, K. Wave Motion and Seabed Response around a Vertical Structure Sheltered by Submerged Breakwaters with Fabry–Pérot Resonance. J. Mar. Sci. Eng. 2022, 10, 1797. https://doi.org/10.3390/jmse10111797
Jiang L, Zhang J, Tong L, Guo Y, He R, Sun K. Wave Motion and Seabed Response around a Vertical Structure Sheltered by Submerged Breakwaters with Fabry–Pérot Resonance. Journal of Marine Science and Engineering. 2022; 10(11):1797. https://doi.org/10.3390/jmse10111797
Chicago/Turabian StyleJiang, Lai, Jisheng Zhang, Linlong Tong, Yakun Guo, Rui He, and Ke Sun. 2022. "Wave Motion and Seabed Response around a Vertical Structure Sheltered by Submerged Breakwaters with Fabry–Pérot Resonance" Journal of Marine Science and Engineering 10, no. 11: 1797. https://doi.org/10.3390/jmse10111797