1. Introduction
The cross-medium vehicle combines the dual advantages of high speed and long range, and is a key direction for the development of new types of vehicle. In the process of transferring from air ballistics to water ballistics, the vehicle will experience a process of high-speed water entry. In this process, due to the sudden change of medium density, complex turbulent flow, large deformation of free surface and strong coupling between multiple phases and many other physical effects, the vehicle will be subjected to a huge impact load, which may lead to problems such as ballistic instability and structural damage of the vehicle. It is of great engineering significance to study dynamic characteristics such as the structural response of the vehicle in this process for the design of the shell and external buffer measures of the vehicle.
Research devoted to the impact load of structures entering water is carried out in three directions [
1], namely, theoretical analysis, numerical calculation and experimental studies. The development of water entry theory started with von Karman. When studying the forced landing of a seaplane, the compressibility of fluid and the influence of flow field movement on the object were ignored. The water entry impact theory of wedge was established by using the momentum conservation theorem, and the water entry impact pressure of wedge was obtained. Miloh [
2] carried out an analytical study on the case of a rigid sphere obliquely entering an ideal incompressible fluid. Under the assumption that the free surface is an equal potential energy plane, the asymptotic expression of the added mass and the hydrodynamic force was obtained. Reinhard [
3] analyzed the problem of two-dimensional elastic plate collision with calm water surface, and studied the influence of the flexibility of the plate and the elastic vibration of the plate on the hydrodynamic load and fluid flow. Hulin et al. [
4] analyzed the influence of gravity in the process of two-dimensional axisymmetric objects entering water, and proposed a water impact model considering the influence of gravity, which is an extension of the Wagner model. It is difficult to establish a mathematical model by theoretical analysis, which often needs to introduce many assumptions. Moreover, most of the existing theoretical research objects are simple geometry, and the relevant theories cannot be directly applied to engineering practice.
With the development of computer technology, numerical research has the advantages of high repeatability and low cost. It is the first choice for many scholars to study the phenomenon of water impact. Different from Computational Fluid Dynamics (CFD), the focus of impact load research is the structural response of structure and fluid under bidirectional dynamic load, rather than the movement of fluid. A common method is to use the Lagrange grid to describe the small deformation of the structure in the process of water entry, and use the Euler grid to capture the large deformation of the free surface. Ryzhakov et al. [
5] applied the Particle Finite Element Method (PFEM) to simulating the sea landing of an unmanned aerial vehicle. They modeled the impact of the vehicle against the water surface and analysed the main kinematic and dynamic quantities. Sun et al. [
6] employed a finite element model of high-speed water entry of a large-scale projectile based on a multi-material arbitrary Lagrange–Euler (multi-material ALE) algorithm, analyzed the impact of the change of nose shape on the overall load of the projectile, and the influence of the change of water entry angle on the overall load and ballistic stability of the projectile. Wang et al. [
7] carried out dynamic analysis of aircraft forced landing on water based on a structured arbitrary Lagrange–Euler (S-ALE) algorithm, extracted the change law of aircraft pitch attitude and overload, and compared it with relevant results of the experiment. He et al. [
8] studied the slamming of three typical sections (bow, parallel midship and stern) of a container ship under three different load conditions (no-load weight, half load weight and full load weight of the ship) using an ALE algorithm, and analyzed and discussed the influence of ship load and section shape on water entry impact, which is helpful to analyze the influence of load on ship slamming at the early stage of ship design. Li et al. [
9] used an arbitrary Lagrange–Euler (ALE) algorithm to conduct numerical simulation on the high-speed water entry of a vehicle (diameter is 240 mm) with head cap, and analyzed the failure mode of the nose cap and the load reduction performance of the head cap. Wei et al. [
10] carried out numerical calculation and analysis on the high-speed water entry of a vehicle (diameter is 324 mm) with buffer components based on ALE method, obtained the dynamic damage process of the nose cap and the foam, studied the motion parameters of the vehicle during the water entry process, and analyzed the performance of different buffer schemes. Sun et al. [
11] studied the load reduction characteristics of the buffering device by using the coupled Euler–Lagrange (CEL) method, and obtained the law that the load reduction performance of a certain water entry velocity varies with the relative density of aluminum foam. Quan et al. [
12] used a coupled Euler–Lagrange solver to study the load reduction performance of the head cap, and analyzed the impact resistance, damage mode of the head cap and the process of the cavity development under different velocity and angle of water entry. At the same time, computational fluid dynamics is also a common means for some scholars to study the phenomenon of water entry. Yu et al. [
13] conducted a numerical study on the free fall of a sphere by using the transient Reynolds average method, and discussed the influence of impact speed, radius, mass and other parameters of the sphere on the impact force and acceleration of the sphere. Qiu et al. [
14] established a mathematical model of the free fall of a lifeboat to the water by using the strip theory and Kane method; the sled force acting on the ship was calculated, and the slamming force of the ship when entering the water was solved. Li et al. [
15] used a ZGB cavitation model and SST turbulence model based on the RANS method to numerically study the influence of cavitation head structure of a high-speed projectile on ballistic stability in the process of water entry, and studied the influence of angle of cavitation head and diameter of cavitation body on ballistic stability and flow characteristics. Yang et.al. [
16] presented a two-phase Smoothed Particle Hydrodynamics (SPH) model for simulating the water entry of a cavity body, investigating the dynamics phenomena in the coupling process between cavity body and two-phase flow and showing the effects of air, mass and the sizes and incline angles of the cavity body on the dynamic characteristics of cavity body and two-phase flows. Sun et al. [
17] studied the characteristics of slamming pressure and impact force of the trimaran profile through computational fluid dynamics, and analyzed the effects of velocity and acceleration on the slamming pressure and impact force. Fan et al. [
18] conducted a numerical study on the phenomenon of a vehicle entering the water at free and constant speed, studied the evolution of cavitation under different head shapes, tail shapes and impact speeds, compared the resistance characteristics of the vehicle under free and constant impact speeds, and analyzed the flow characteristics of the flow field. Wang et al. [
19] used computational fluid dynamics to simulate the process of a cylinder vertically entering an ice-free water surface and an ice–water mixture at low speed based on the Finite Volume Method (FVM), the Volume of Fluid method (VOF), the continuous surface force (CSF) model and overlapping grid technology, providing a useful reference for the design of a new type of cross-medium projectile in an extremely low temperature environment in winter. Because there is a certain deviation between numerical calculation and physical reality when establishing a mathematical model, and some practical factors are difficult to consider, experimental research is often used as a supplement to numerical calculation to verify the correctness and accuracy of the numerical model.
For research experiments in water entry, people need to pay attention to the evolution process of cavity and flow field in the process of water entry, which is closely related to the force situation of the structure and the change of ballistic attitude. Chen et al. [
20] used high-speed photography technology to conduct experimental research on the high-speed oblique entry of projectiles into water, and studied the formation, growth and pinch off of cavitation, as well as the tail beat motion, vortex shedding, splash, ascending jet, trajectory deflection and surface closure, and established a prediction formula for the underwater cavitation profile and maximum cavitation size. Panciroli et al. [
21] carried out an experiment of the flexible wedge impacting the static water surface at a vertical speed, studied the influence of the wedge bending stiffness, static lift angle and drop height on the formation of cavitation, and revealed the mechanism of cavitation formation. Zhou et al. [
22] used high-speed laser shadow and schlieren flow field display technology to study the deformation and breaking of the air–water interface and gave the evolution image of the flow field of the high-speed oblique penetration of projectiles into the water. Chen et al. [
23] conducted an experimental study on the ballistic stability of high-speed projectiles entering the water by using dynamic photography, and quantitatively expressed the influence of head shape, impact speed and water entry attitude angle on the ballistic stability of slender projectiles. Song et al. [
24] carried out a high-speed oblique water entry experiment of a cylindrical projectile by using high-speed photography technology, and explored the influence of projectile shape and initial conditions on the development and change of cavitation. She et al. [
25] used time-resolved particle image velocimetry (TR-PIV) technology to test the flow field of wedges with different bottom lift angles during water entry, analyzed the motion response and flow field during water entry, and discussed the accuracy and applicability of the pressure reconstruction scheme based on TR-PIV. Liu et al. [
26] developed an experiment system, captured the shock waves in the air and water caused by oblique water entry, and observed the fluctuation and instability of the air–water interface of the tail bubble during horizontal water entry. Sun et al. [
27] studied the flow field and the characteristics of impact load of an aerated cylinder when it entered the water vertically and obliquely, and studied the influence of ventilation and angle of attack on impact load and characteristics of flow field. Tang et al. [
28] studied the air cushion effect when a trimaran enters the water, proposed a test method and a new model design, and analyzed the influence of the model opening size and the initial release height on the slamming pressure.
As far as the existing bibliography is concerned, it is mainly aimed at the ballistic attitude or the development and evolution of cavitation during the high-speed water entry of the vehicle. Few studies aim at understanding the dynamic characteristics such as the structural response of the shell during high-speed water entry. The conclusion of this paper provides an input for the design of a newer load-reduction device for high-speed water entry of a vehicle.
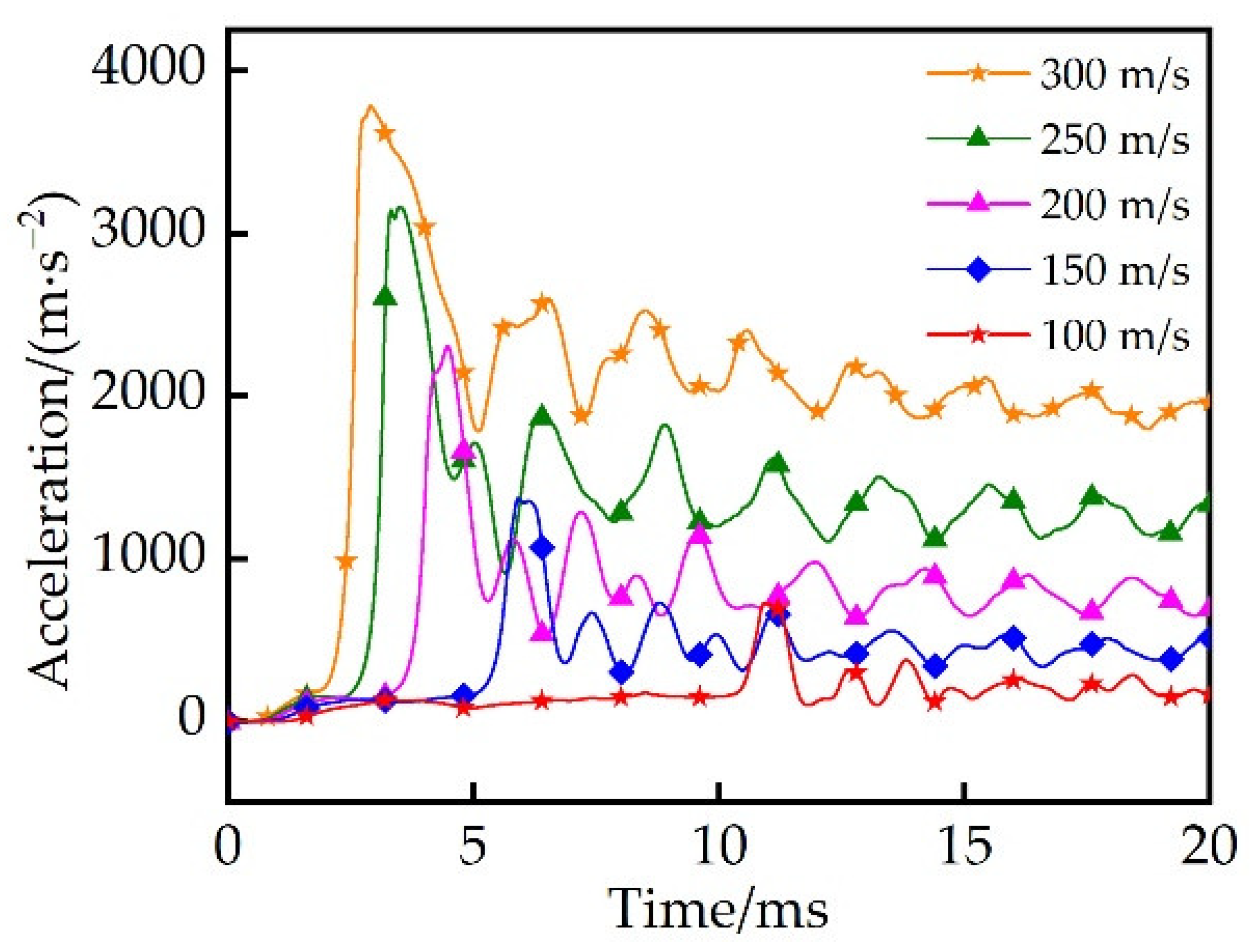
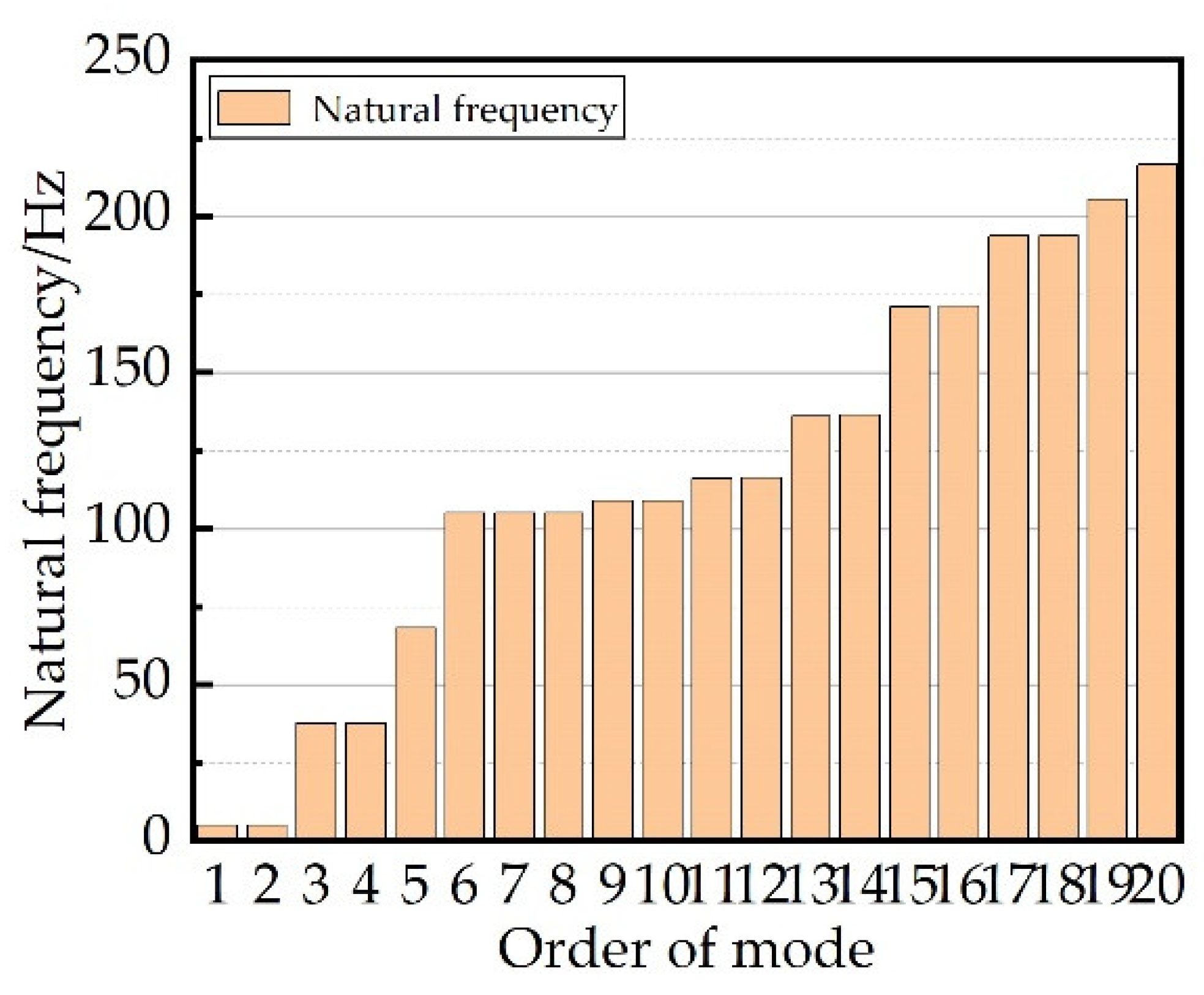
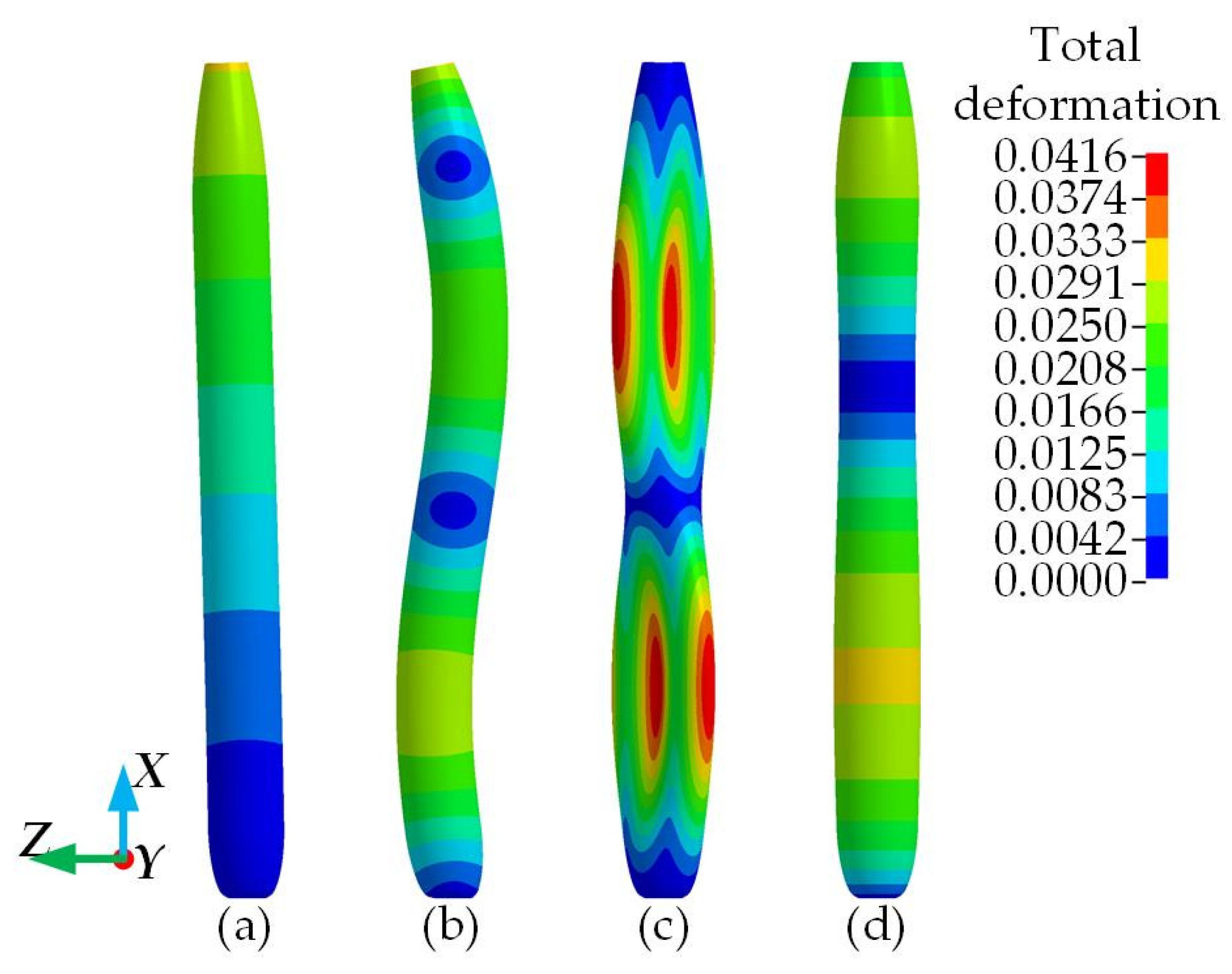
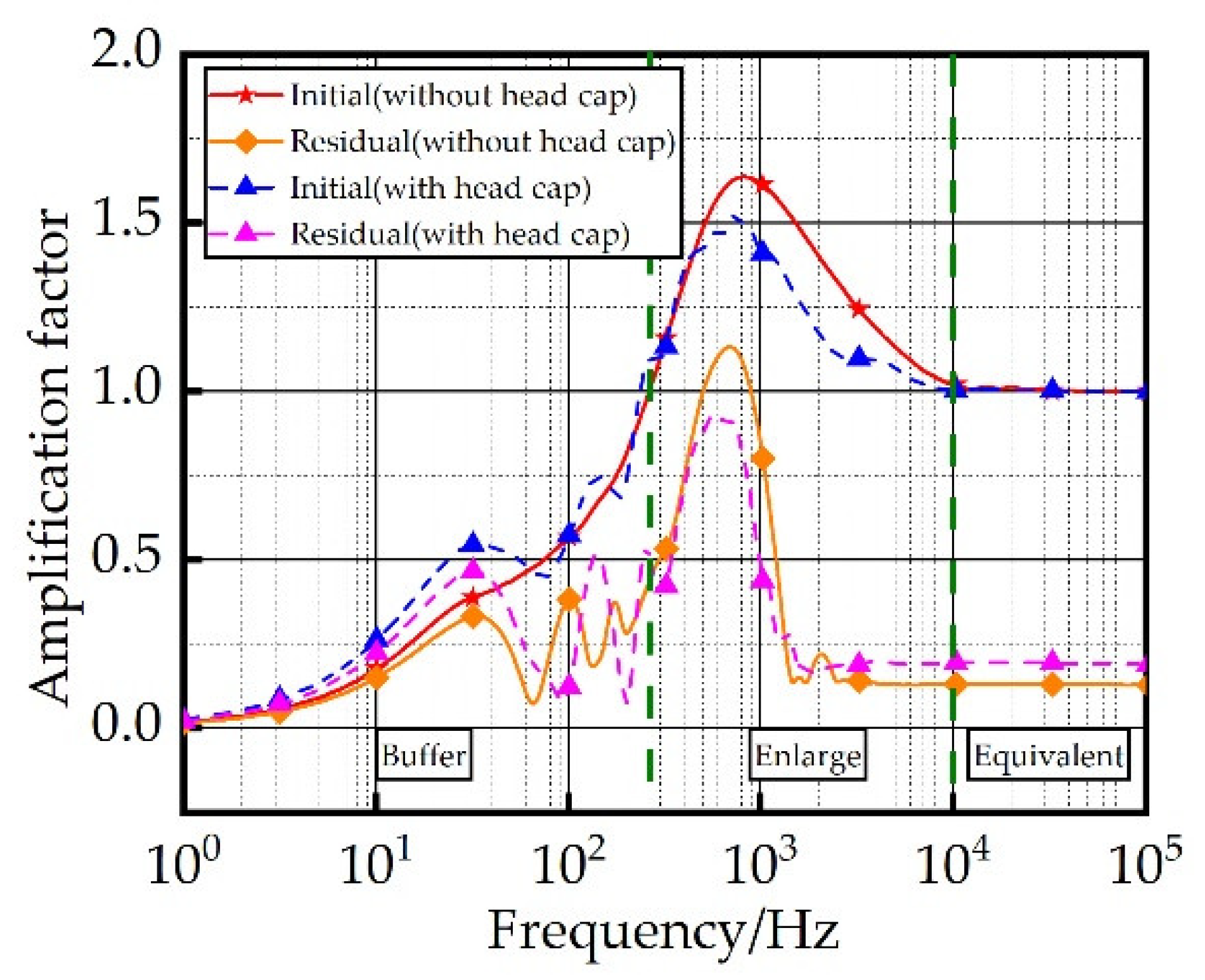
The structure of this article is as follows. The second section introduces the configuration and geometric parameters of the vehicle and the head cap, then introduces the numerical model. In the third section, the time–domain characteristics of cavity and impact load are analyzed. In the fourth section, the dry modal analysis of the vehicle is carried out, and the different modal shapes and corresponding natural frequencies are obtained. Then, the shock response spectrum of the impact load obtained in the third section is calculated. Finally, the structural response of the shell in the process of water entry is solved by combining modal analysis and shock response spectrum. The last section introduces the main conclusions of this paper.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}