
Study on the Hole-Forming Performance and Opening of Mulching Film for a Dibble-Type Transplanting Device
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
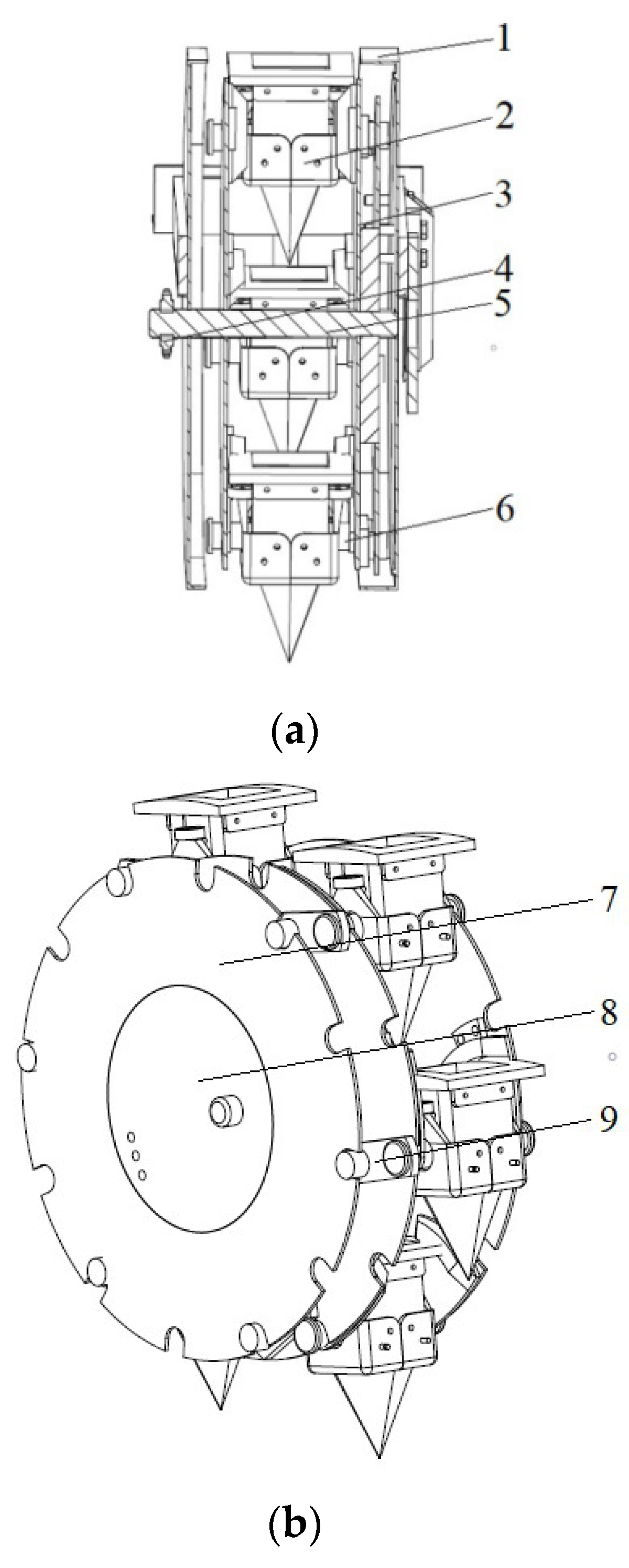
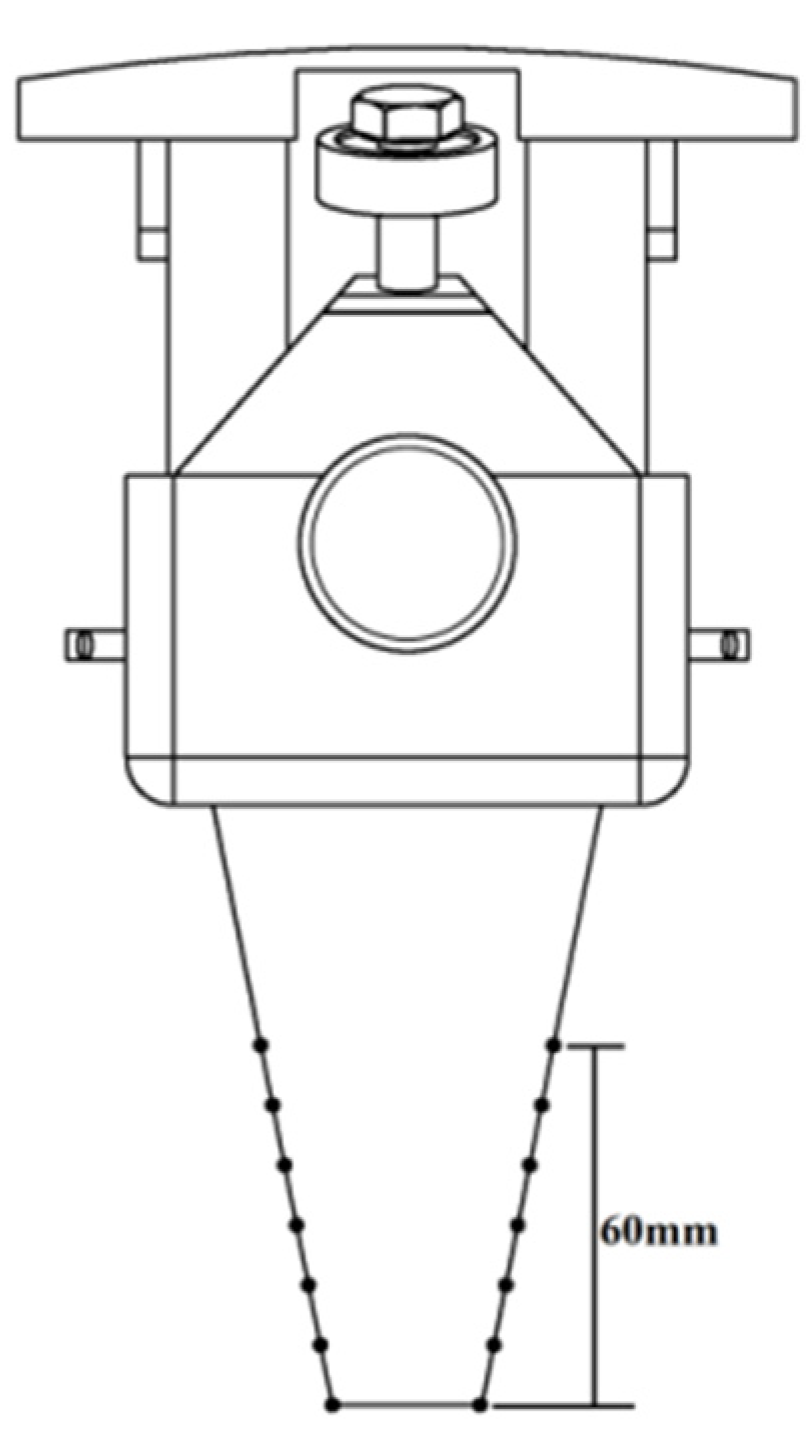
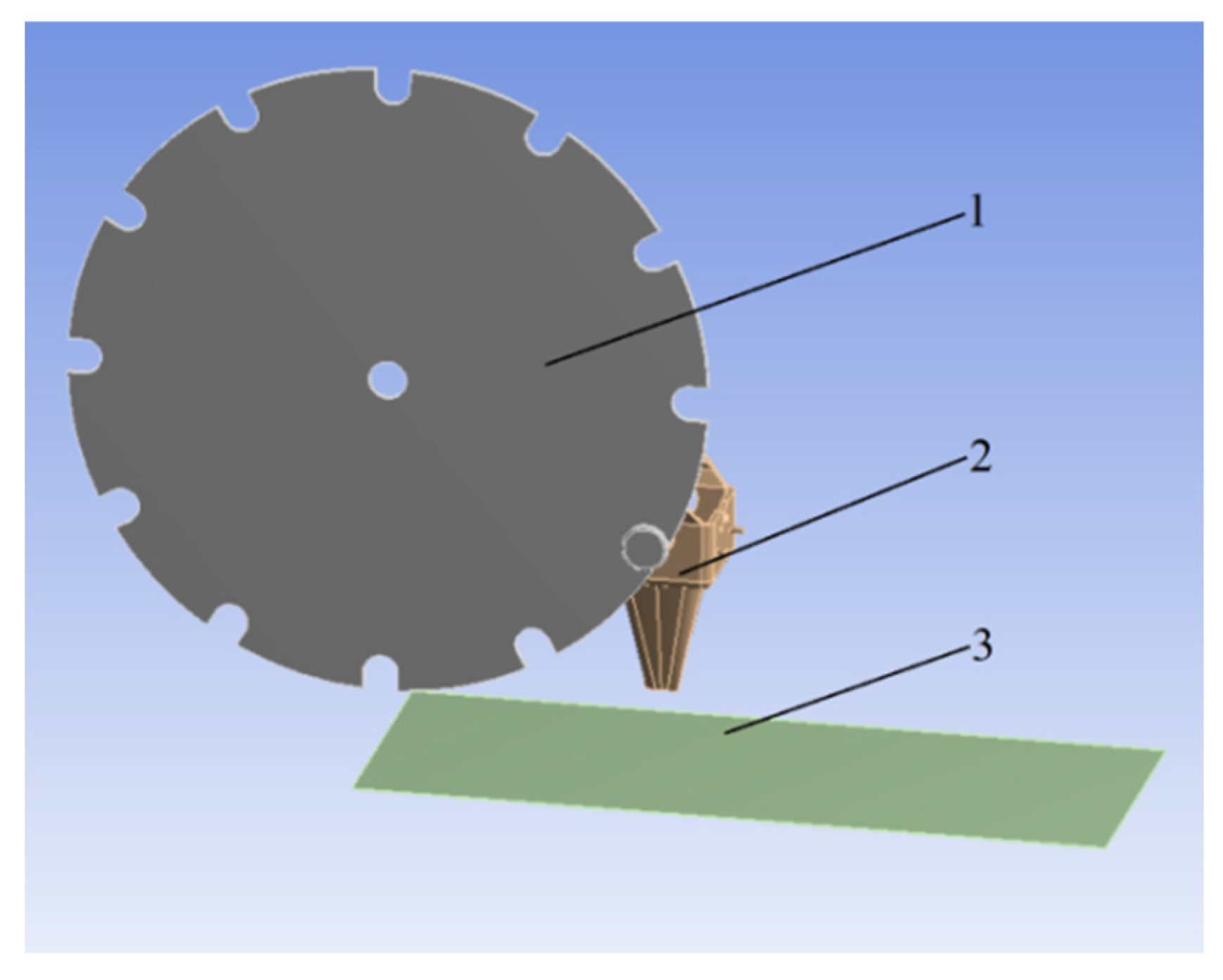
2.1. The Whole Structure and Working Principle of the Transplanting Device
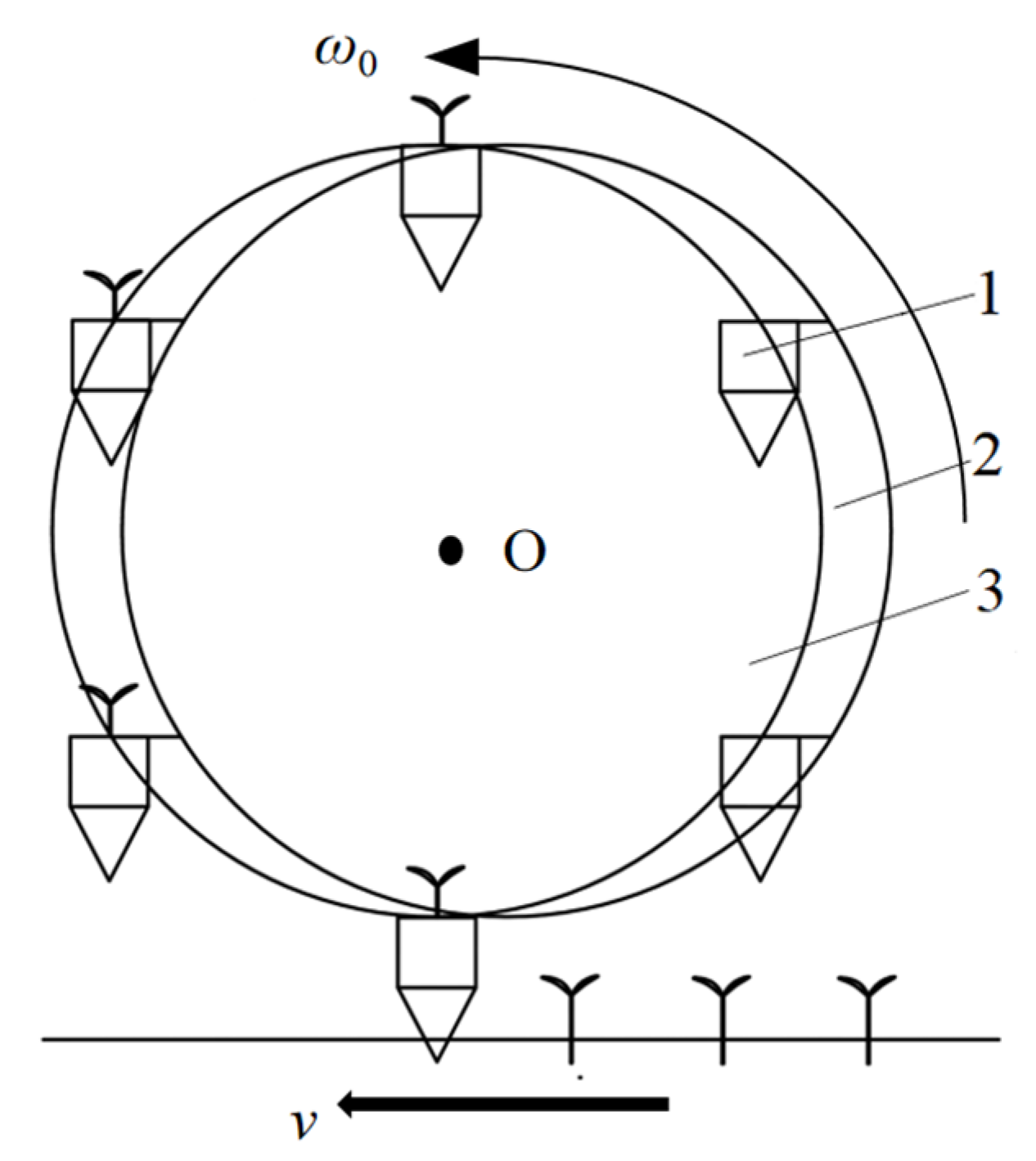
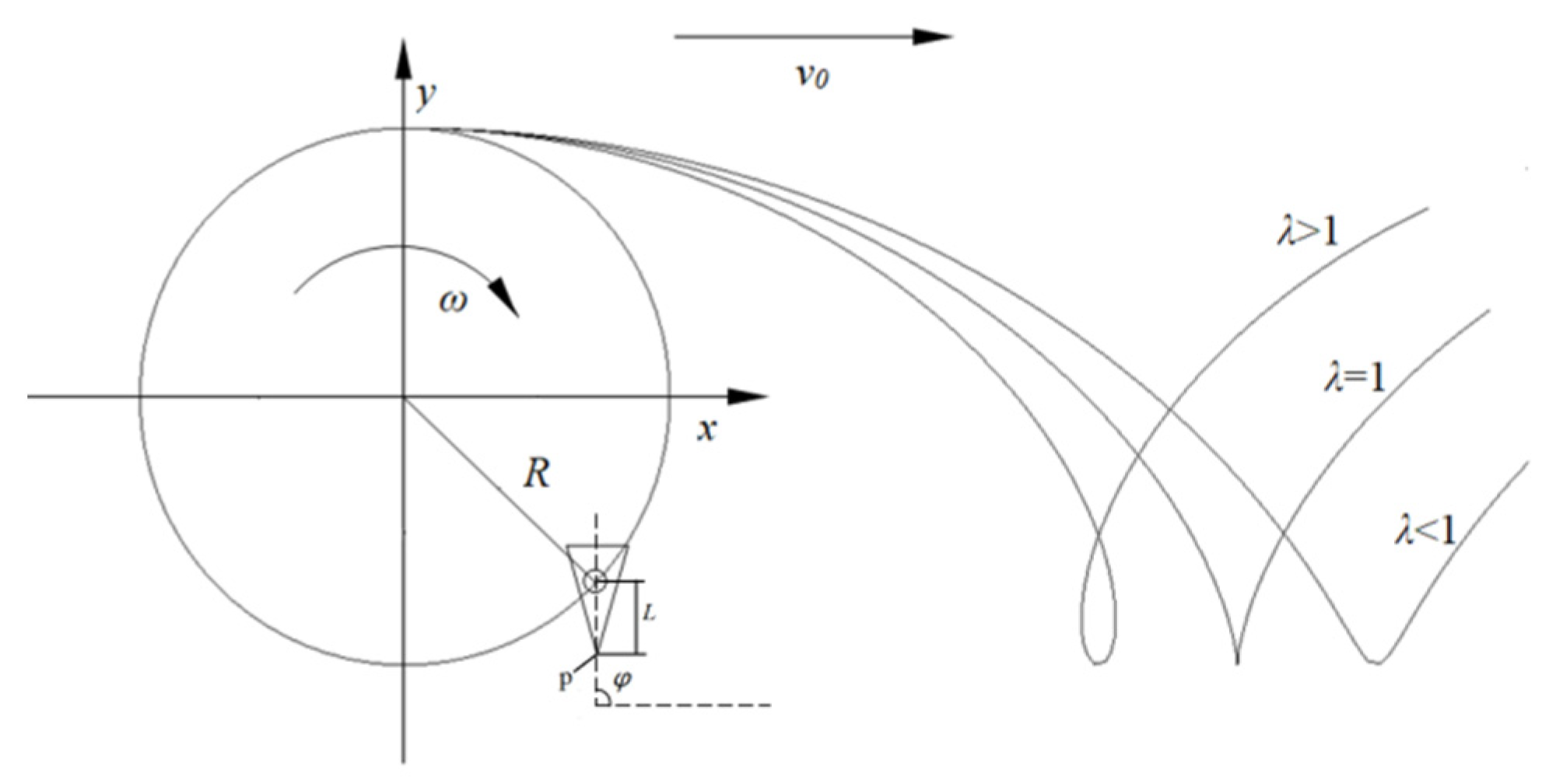
2.2. The Kinematic Analysis of the Transplanting Device
2.3. ADAMS-Based Kinematic Simulation and Analysis for Transplanting Unit
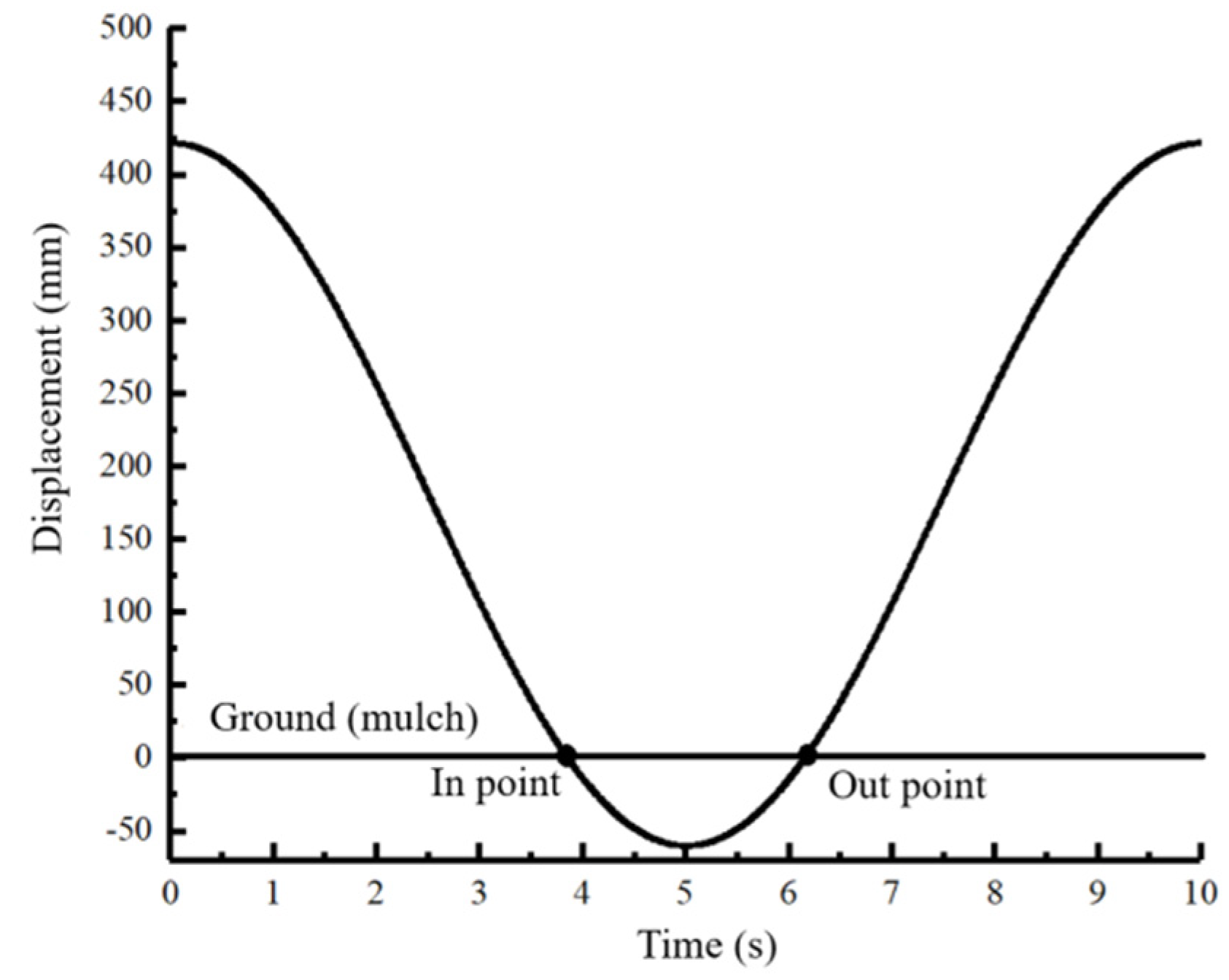
2.3.1. The Displacement Curve of the Transplanting Unit
2.3.2. Kinematic Simulation Analysis
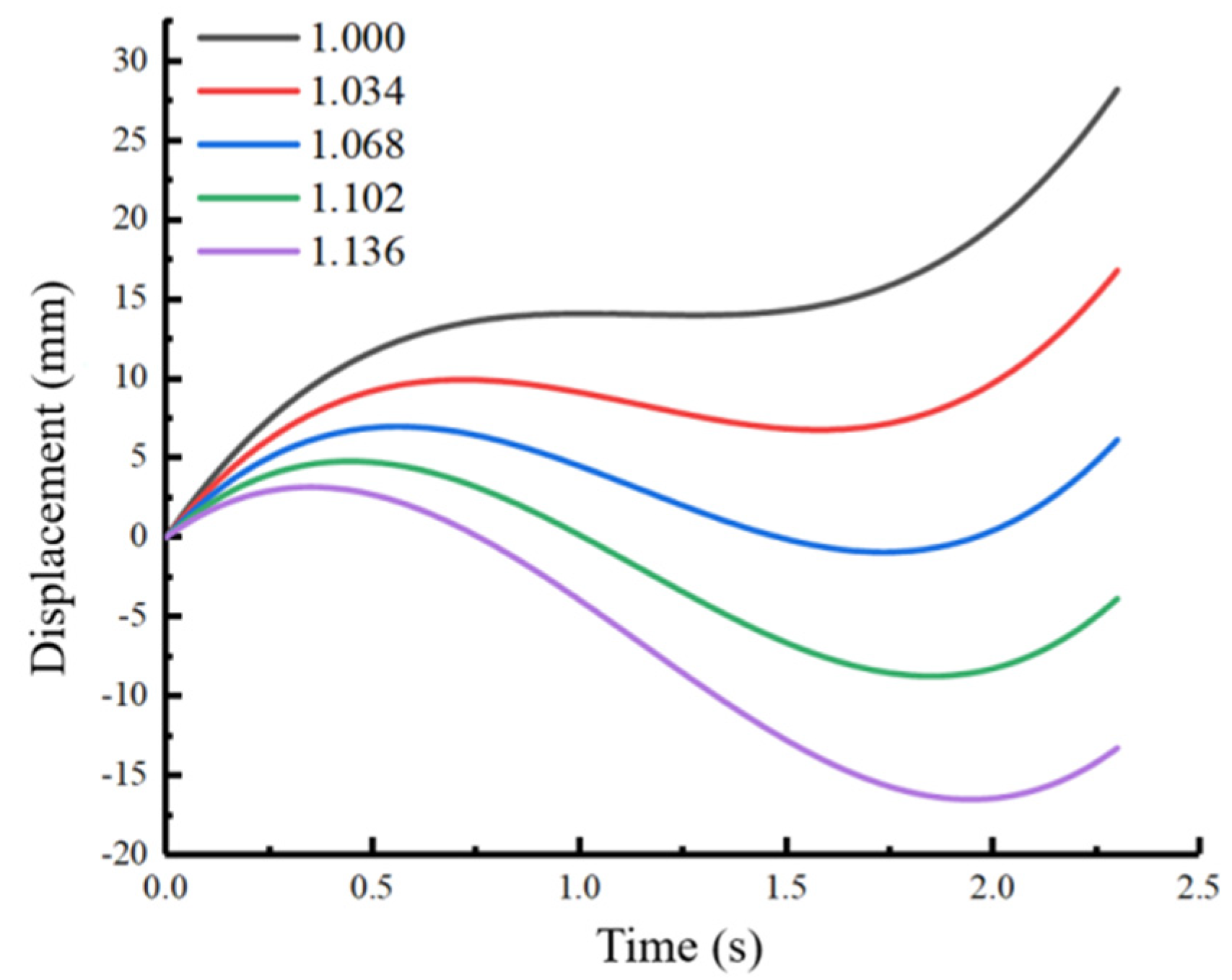
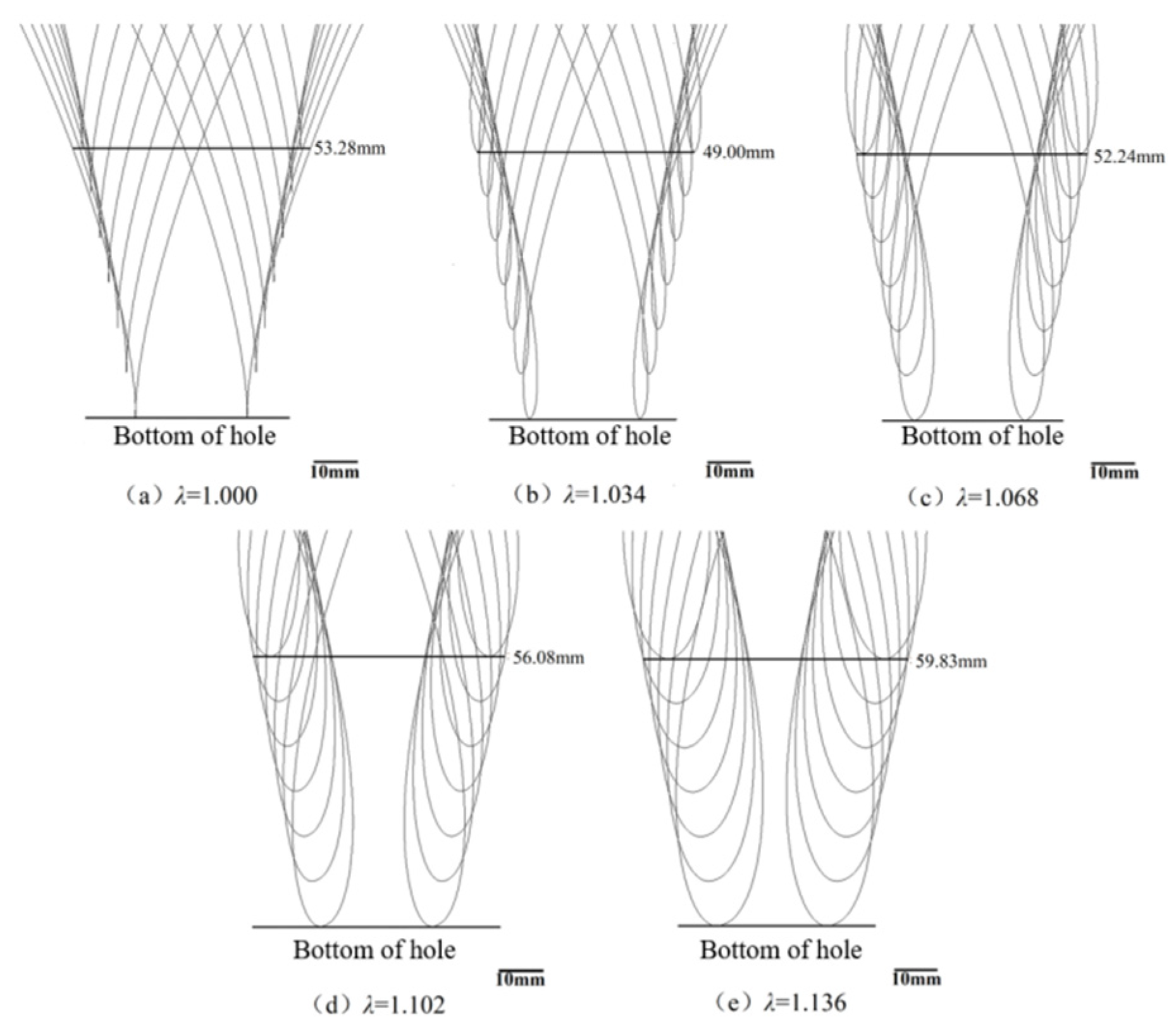
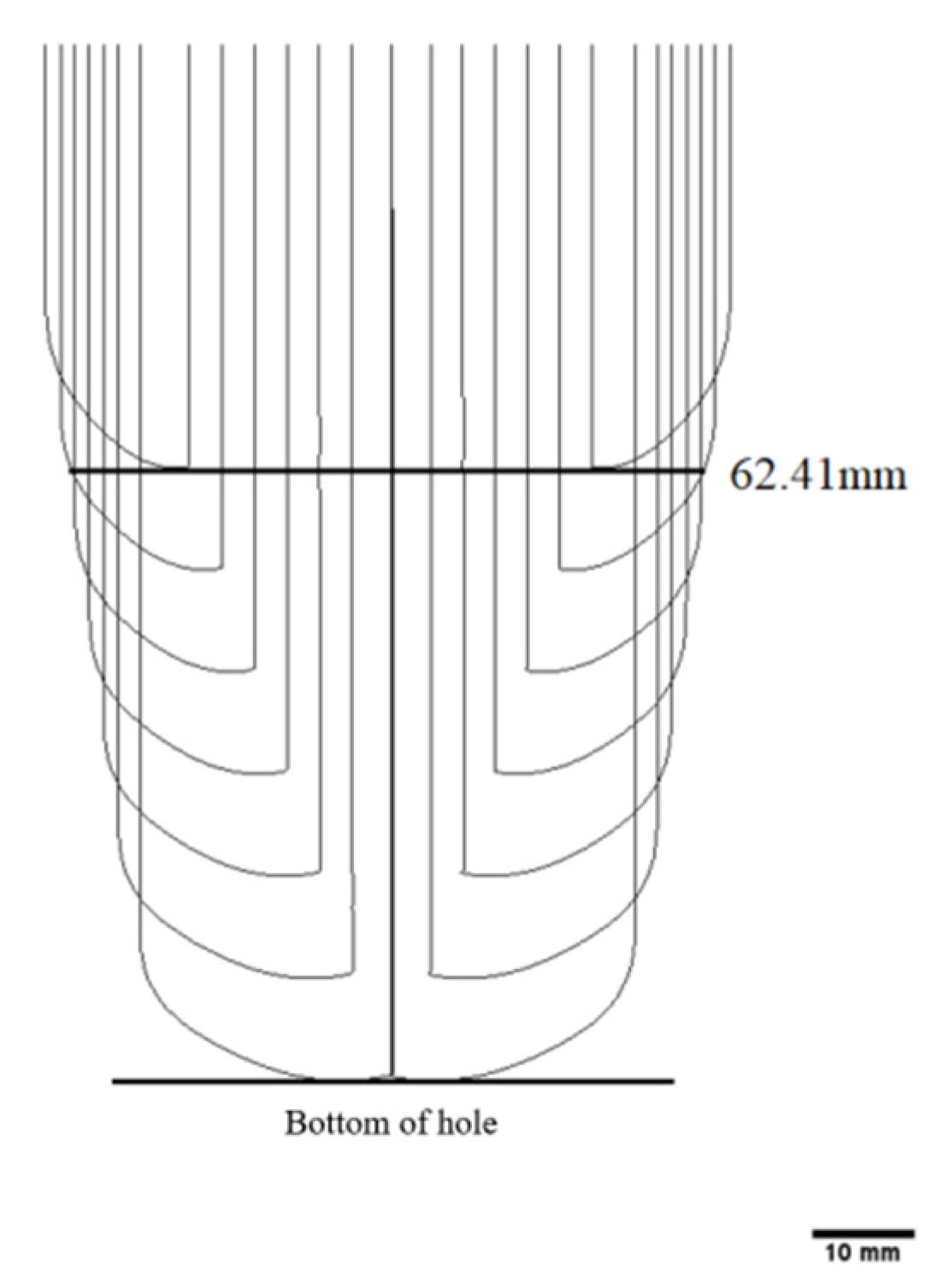
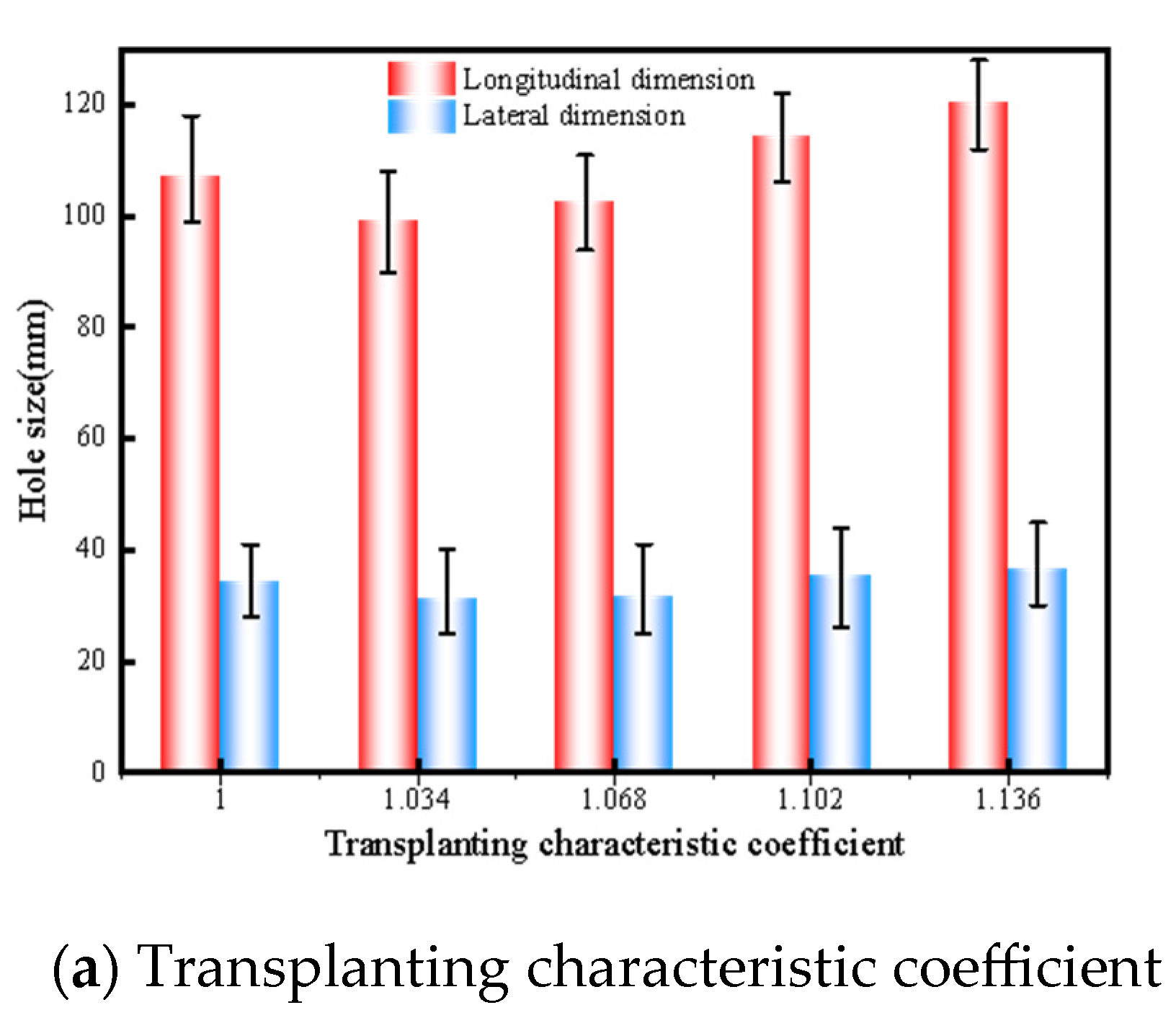
The Effect of the Transplanting Characteristic Coefficient on the Longitudinal Dimension of the Hole Opening
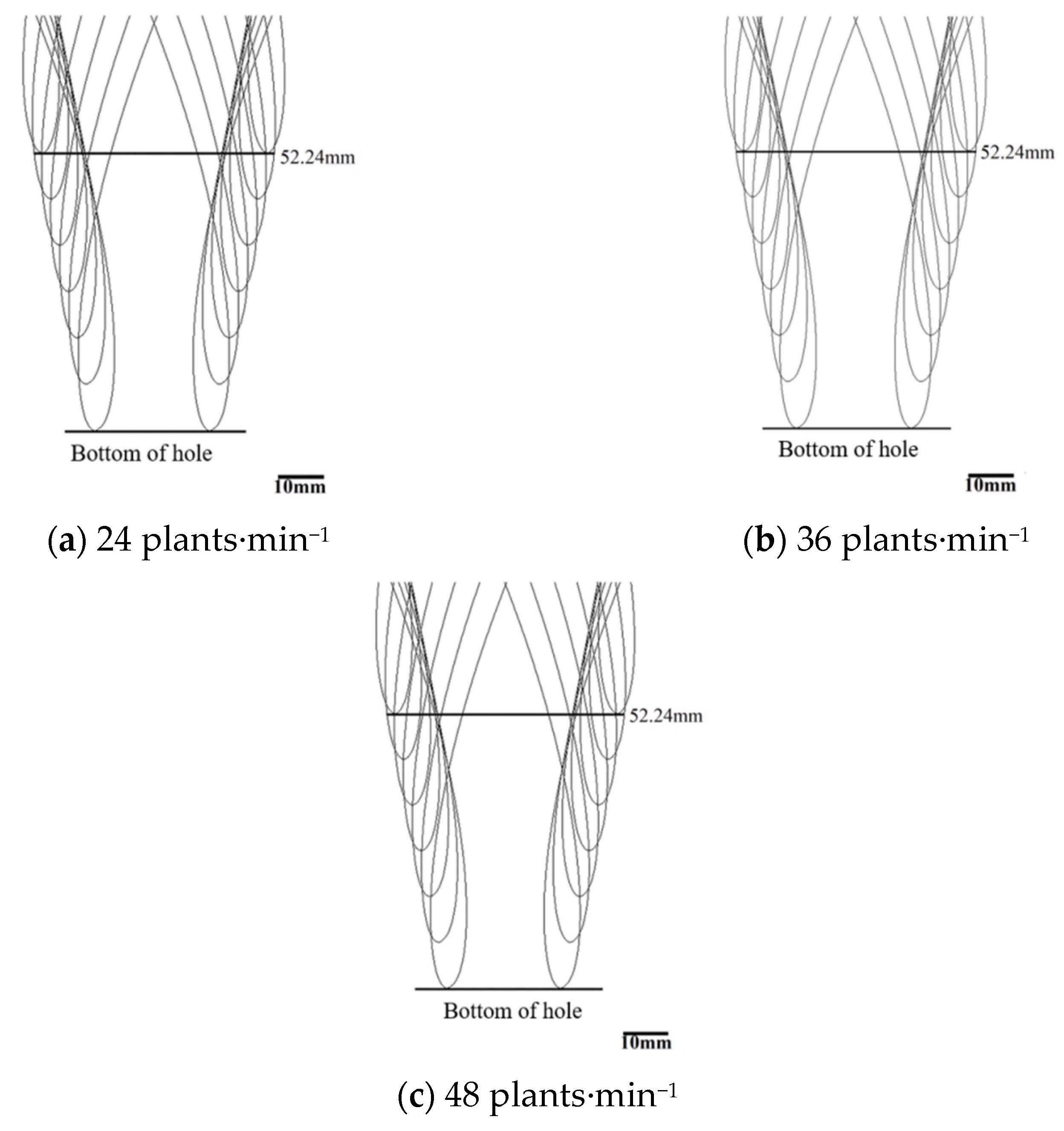
The Effect of the Transplanting Frequency on the Longitudinal Dimension of the Hole Opening
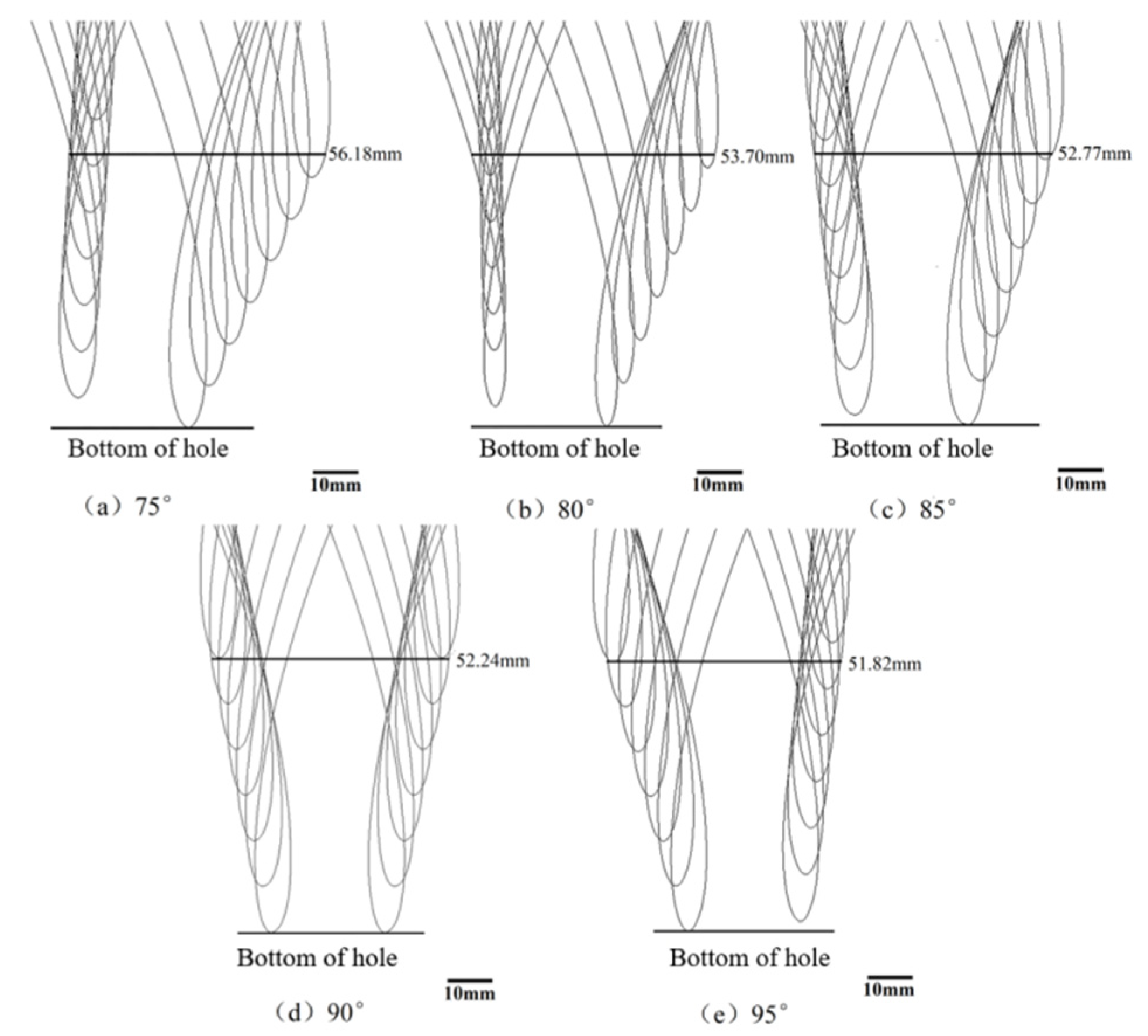
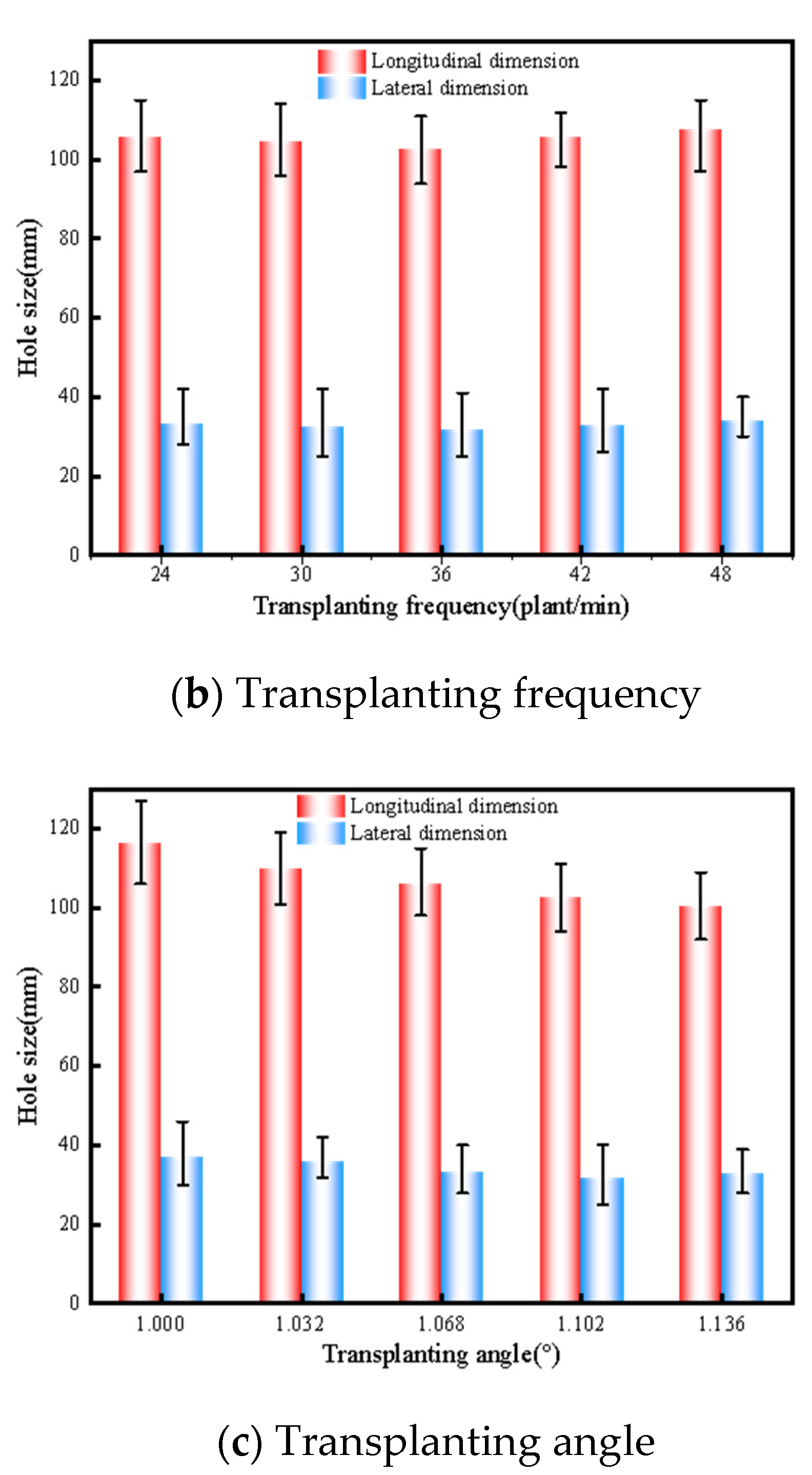
The Effect of the Transplanting Angle on the Longitudinal Dimension of the Hole Opening
The Lateral Dimension of the Hole Opening
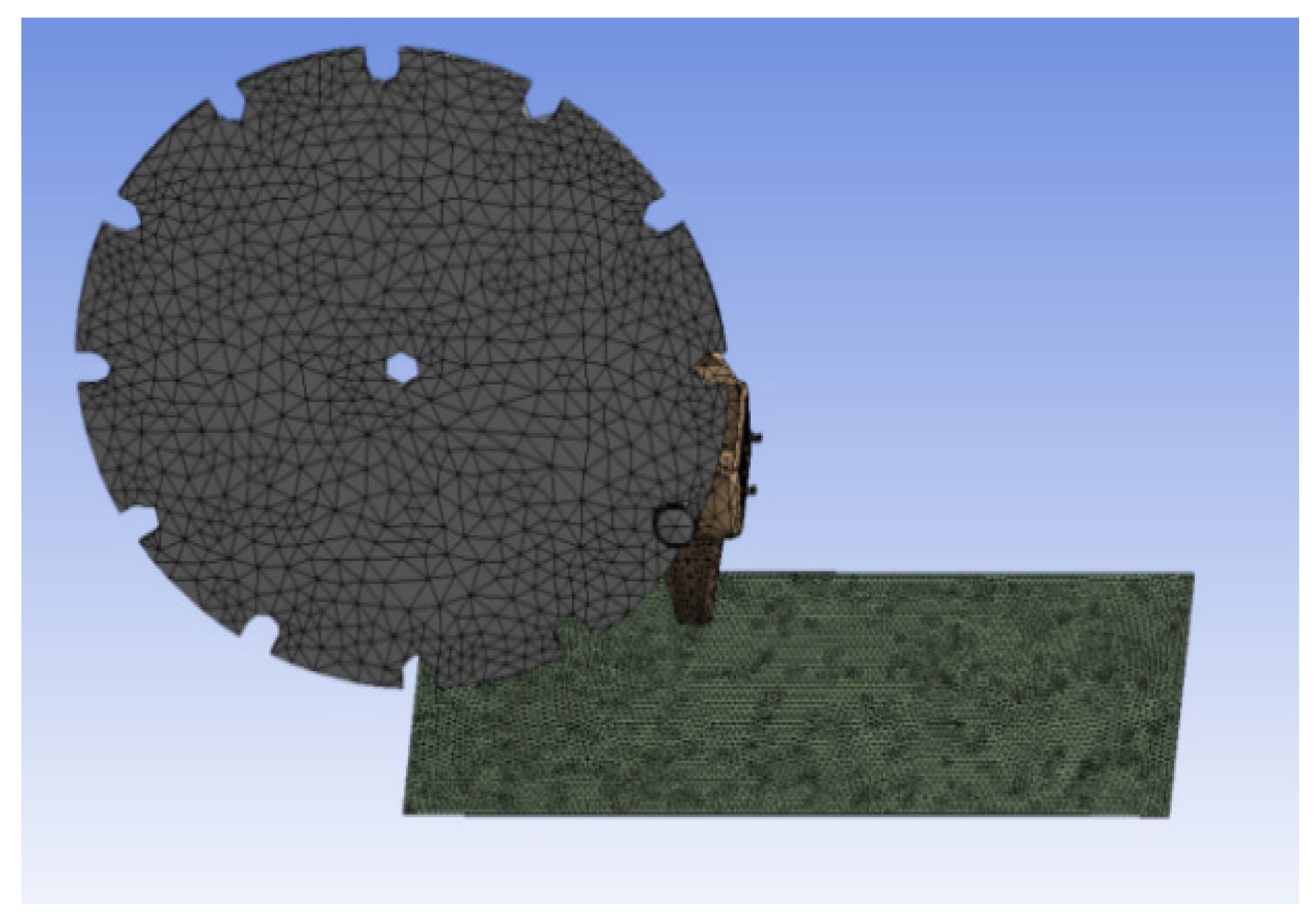
2.4. Dynamic Simulation Analysis Based on ANSYS WORKBENCH
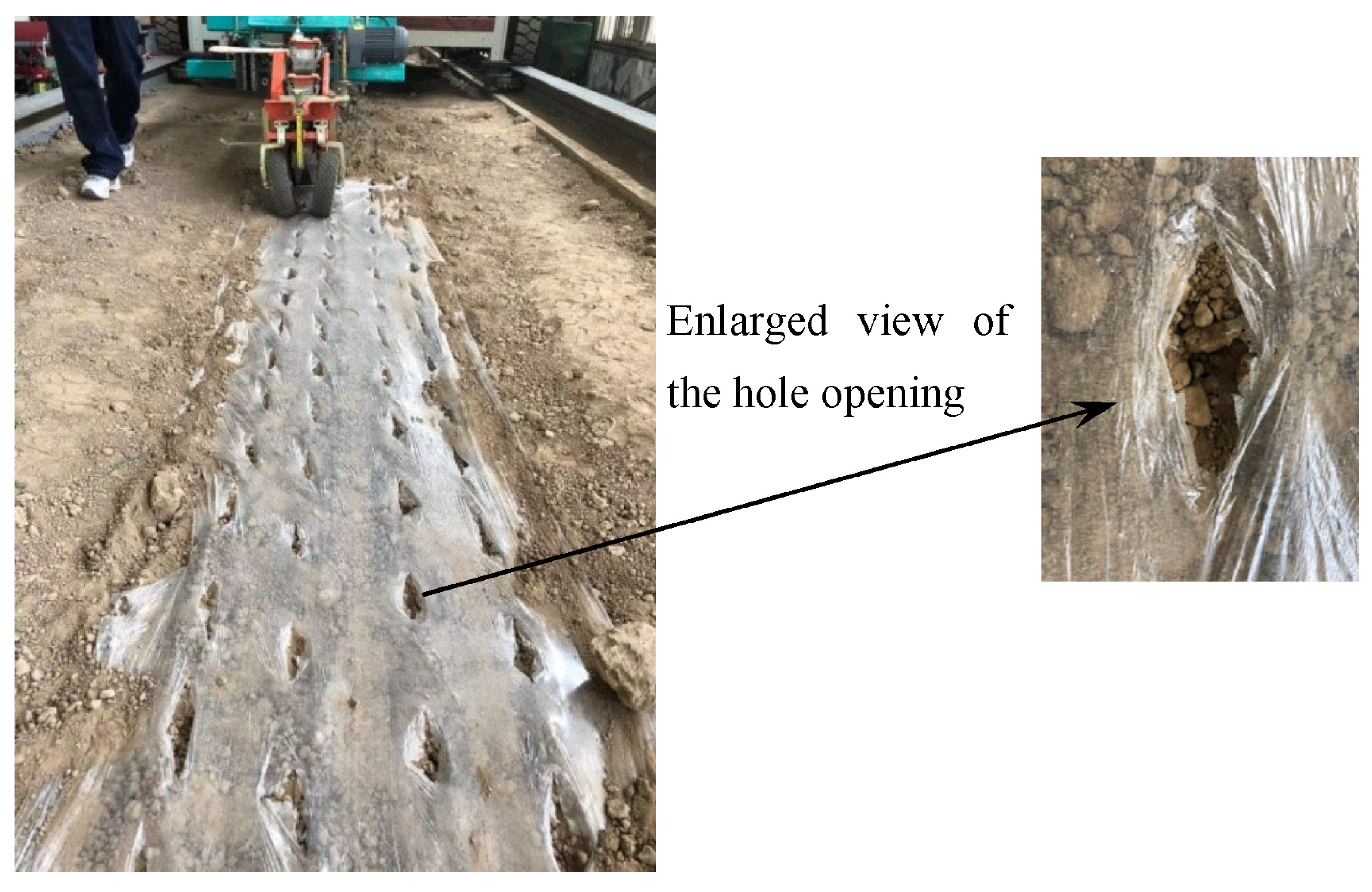
2.5. The Film-Breaking Experiment on the Soil−Tank Test Bench
3. Results and Discussion
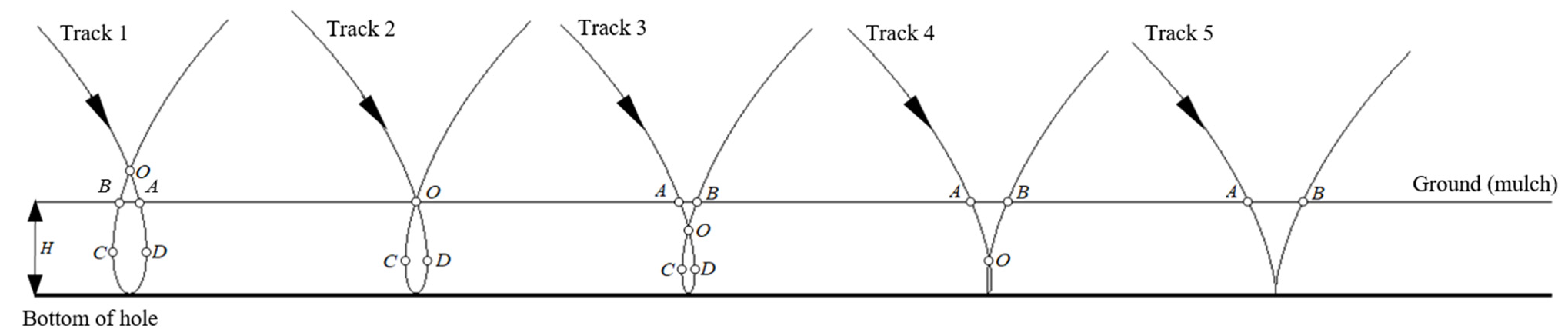
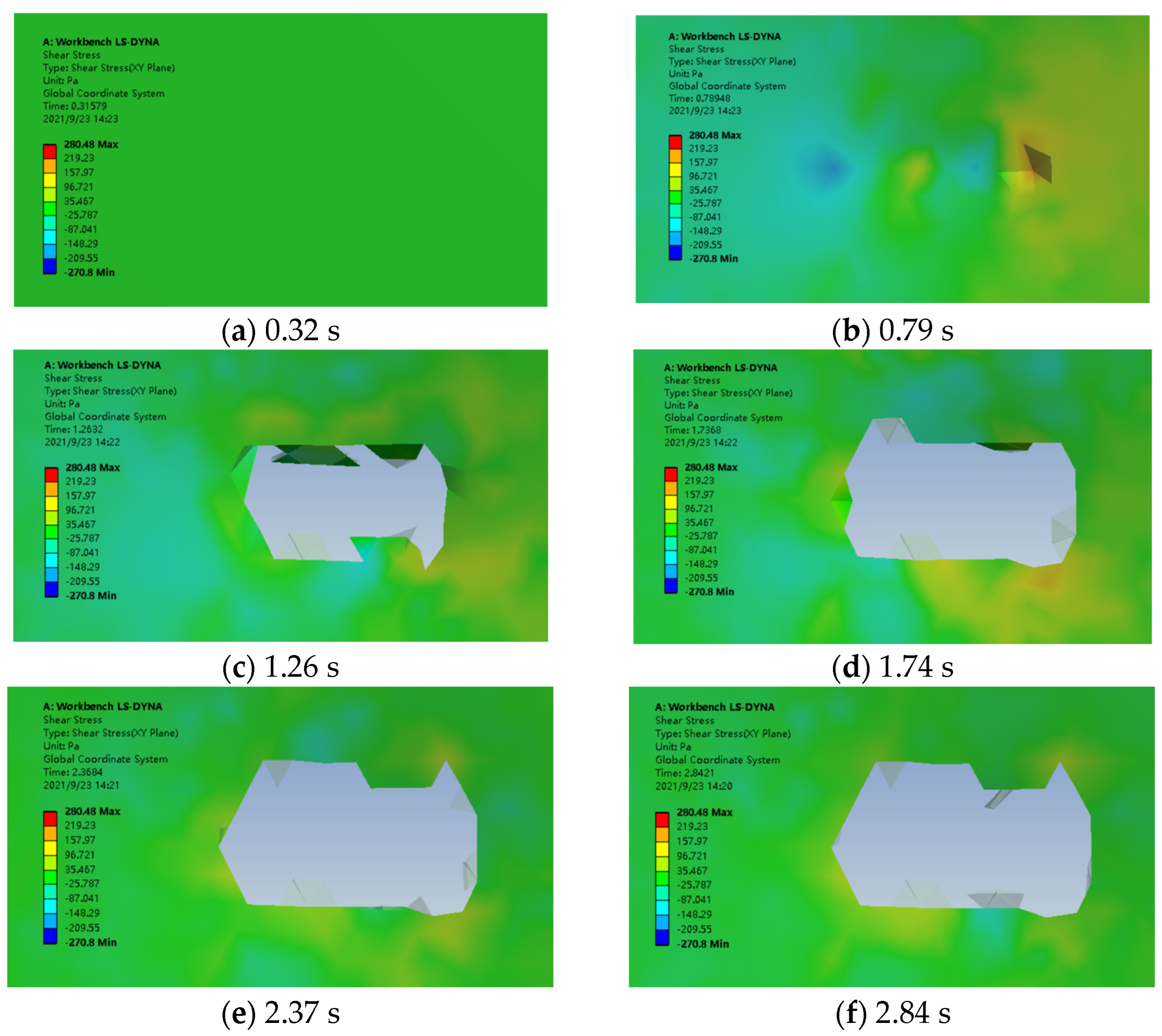
3.1. The Process of Hole-Opening Formation in Mulching Film
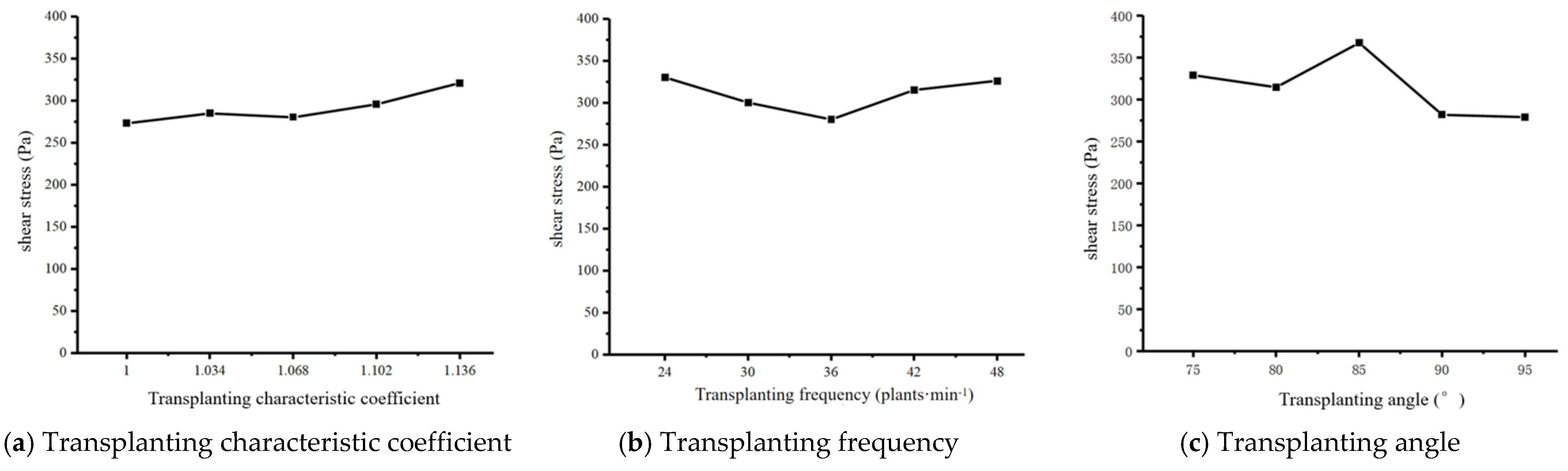
3.2. The Effect of the Maximum Shear Stress on the Mulching Film under Different Experimental Factors
3.3. The Effect of Different Experimental Factors of the Mulching Film on the Size of the Hole Opening
4. Conclusions
- (1)
- The kinematic track of the lower end-point of the transplanting unit was analyzed, and the kinematic track equation was established. According to the results calculated by the kinematic track Equation (11), the actual transplanting depth of the vegetable seedling is 60 mm, the transplanting characteristic coefficient of the minimum displacement of the lower end of the transplanting unit under the mulching film is 1.068, and the horizontal displacement of the transplanting unit under the mulching film is minimal.
- (2)
- The results of the ADAMS simulation show that the transplanting characteristic coefficient, the transplanting frequency, and the transplanting angle have no effect on the lateral hole-opening dimension of the envelope, and the transplanting frequency has no effect on the longitudinal dimension of the hole opening. But when the longitudinal dimension of the hole opening of the envelope is the smallest, the transplanting characteristic coefficient is 1.034, and the transplanting angle is 95°. Therefore, in the actual transplanting operation, in order to reduce the size of the hole opening in the mulching film, the transplanting characteristic coefficient and the transplanting angle should be reasonably controlled.
- (3)
- The pressure nephogram from the ANSYS WORKBENCH finite element analysis shows that the maximum shear stress of the mulching film in the longitudinal direction is greater than that in the lateral direction. When the transplanting characteristic coefficient, the transplanting frequency, and the transplanting angle are 1.000, 36 plants·min−1, and 95°, respectively, the maximum shear stress of the mulching film in the process of hole-opening formation is the smallest. So, in the process of transplanting, the operating parameters with less shear stress on the mulching film should be selected as much as possible to reduce the occurrence of mulching-film damage and tearing.
- (4)
- The optimal parameters were verified through a film-breaking experiment on a soil-tank test bench. Under the conditions of different transplanting characteristic coefficients, transplanting frequencies, and transplanting angles, the differences between the maximum and minimum sizes of the longitudinal dimension of the hole opening in the mulching film are 21.20 mm, 5.20 mm, and 15.86 mm, respectively, and the differences between the maximum and minimum sizes of the lateral dimension of the hole opening in the mulching film are 4.86 mm, 2.20 mm, and 5.40 mm, respectively. The larger the difference between the maximum size and the minimum size of the hole opening in the mulching film, the more significant the influence of the experimental factors on the hole-opening dimensions. The transplanting characteristic coefficient has the most significant effect on the longitudinal dimension of the hole opening, the transplanting angle has the most significant effect on the lateral dimension of the hole opening, and the transplanting frequency has no significant effect on the dimensions of the hole opening. The test results show that the influence of each test factor on hole-opening formation in the mulching film is the same as shown by the simulation analysis results, and the simulation test results have important reference and guiding significance for the size of the actual hole opening.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Li, L.; Wu, W.L.; Giller, P.; O’Halloran, J.; Liang, L.; Peng, P.; Zhao, G. Life cycle assessment of a highly diverse vegetable multi-cropping system in Fengqiu County, China. Sustainability 2018, 10, 983. [Google Scholar] [CrossRef]
- Yin, D.Q.; Wang, J.Z.; Zhang, S.; Zhang, N.Y.; Zhou, M.L. Optimized design and experiments of a rotary-extensive-type flowerpot seedling transplanting mechanism. Int. J. Agric. Biol. Eng. 2019, 12, 45–50. [Google Scholar] [CrossRef]
- Ji, J.T.; Cheng, Q.; Jin, X.; Zhang, Z.H.; Xie, X.L.; Li, M.Y. Design and test of 2ZLX-2 transplanting machine for oil peony. Int. J. Agric. Biol. Eng. 2020, 13, 61–69. [Google Scholar] [CrossRef]
- Wen, Y.S.; Zhang, J.X.; Tian, J.Y.; Duan, D.S.; Zhang, Y.; Tan, Y.Z.; Yuan, T.; Li, X. Design of a traction double-row fully automatic transplanter for vegetable plug seedlings. Comput. Electron. Agric. 2021, 182, 106017. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.Y.; Ma, H.; Ji, J.T.; Zhao, K.X.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Uchiyama, H.; Wada, Y.; Hatanaka, Y.; Hirata, Y.; Taniguchi, M.; Kadota, K.; Tozuka, Y. Solubility and permeability improvement of quercetin by an interaction between α-glucosyl stevia nano-aggregates and hydrophilic polymer. J. Pharm. Sci. 2019, 108, 2033–2040. [Google Scholar] [CrossRef] [PubMed]
- Kumar, N.; Upadhyay, G.; Choudhary, S.; Patel, B.; Naresh Chhokar, R.S.; Gill, S.C. Resource conserving mechanization technologies for dryland agriculture. In Enhancing Resilience of Dryland Agriculture under Changing Climate: Interdisciplinary and Convergence Approaches; Springer Nature: Singapore, 2023; pp. 657–688. [Google Scholar]
- Hu, S.; Hu, M.; Yan, W.; Zhang, W. Design and Experiment of an Integrated Automatic Transplanting Mechanism for Picking and Planting Pepper Hole Tray Seedlings. Agriculture 2022, 12, 557. [Google Scholar] [CrossRef]
- Quan, W.; Wu, M.; Dai, Z.; Luo, H.; Shi, F. Design and Testing of Reverse-Rotating Soil-Taking-Type Hole-Forming Device of Pot Seedling Transplanting Machine for Rapeseed. Agriculture 2022, 12, 319. [Google Scholar] [CrossRef]
- Vlahidis, V.; Rosca, R.; Cârlescu, P.-M. Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype. Agriculture 2024, 14, 388. [Google Scholar] [CrossRef]
- Fu, J.; Cui, Z.; Chen, Y.; Guan, C.; Chen, M.; Ma, B. Simulation and Experiment of Compression Molding Behavior of Substrate Block Suitable for Mechanical Transplanting Based on Discrete Element Method (DEM). Agriculture 2023, 13, 883. [Google Scholar] [CrossRef]
- Du, S.; Wang, W.B.; Wang, J.K. Parameters research of dibble-type transplanter for the smallest mulch-film damage. J. Chin. Agric. Mech. 2016, 37, 5–8+17. (In Chinese) [Google Scholar]
- Feng, J.; Qin, G.; Song, W.T.; Liu, Y.J. The Kinematic analysis and design criteria of the dibble-type planting devices. Trans. CSAM 2002, 33, 48–50. (In Chinese) [Google Scholar]
- Cui, W.; Zhao, L.; Song, J.N.; Lin, J.T. Kinematic analysis and experiment of dibble-type planting device. Trans. CSAM 2012, 43 (Suppl. S1), 35–38+34. (In Chinese) [Google Scholar]
- Li, X.Y.; Wang, Y.W.; Lu, G.C.; Zhang, B.; Zhang, H.J. Optimization design and experiment of dibble-type transplanting device. Trans. CSAE 2015, 31, 58–64. (In Chinese) [Google Scholar]
- Liu, Y.; Mao, H.P.; Wang, T.; Li, B.; Li, Y.X. Collision optimization and experiment of tomato plug seedling in basket-type transplanter. Trans. CSAM 2018, 49, 143–151. (In Chinese) [Google Scholar]
- Tian, Y.; Li, X.Y.; Zhang, H.J.; Chi, M.L.; Zhang, X.J. Design and the motion simulation for spatial cam of dibble-type planting device. J. Agric. Mech. Res. 2014, 36, 62–65+69. (In Chinese) [Google Scholar]
- Zhang, X.Z.; Li, X.Y.; Tian, Y.; Chi, M.L. Three-dimensional modeling and motion simulation analysis of dibble-type planting device based on Pro/E. J. Agric. Mech. Res. 2014, 36, 87–90. (In Chinese) [Google Scholar]
- Jin, X.; Li, S.J.; Yang, X.J.; Yan, H.; Wu, J.M.; Mao, Z.H. Motion analysis and parameter optimization for pot seedling planting mechanism based on up-film transplanting. Trans. CSAM 2012, 43 (Suppl. S1), 29–34. (In Chinese) [Google Scholar]
- Xue, X.L.; Li, L.H.; Xu, C.L.; Li, E.Q.; Wang, Y.J. Optimized design and experiment of a fully automated potted cotton seedling transplanting mechanism. Int. J. Agric. Biol. Eng. 2020, 13, 111–117. [Google Scholar] [CrossRef]
- Li, H.; Cao, W.B.; Li, S.F.; Fu, W.; Liu, K.Q. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling. Trans. CSAE 2015, 31, 20–27. (In Chinese) [Google Scholar]
- Zhou, M.F.; Huang, Z.J.; Shi, L.D.; Yu, G.H.; Zhao, X.; Liu, P.F. Improvement design and experimental analysis of automatic transplanting of flower plug seedlings. J. Chin. Agric. Mech. 2019, 40, 10–16. (In Chinese) [Google Scholar]
- Zhou, M.F.; Xu, J.J.; Tong, J.H.; Yu, G.H.; Zhao Xiong Xie, J. Design and experiment of integrated automatic transplanting mechanism for taking and planting of flower plug seedling. Trans. CSAE 2018, 34, 44–51. (In Chinese) [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Displacement/(mm) | |
|---|---|
| 1.000 | 28.22 |
| 1.034 | 16.81 |
| 1.068 | 7.91 |
| 1.102 | 13.53 |
| 1.136 | 19.68 |
| Material Properties | Density (kg·m−3) | Young’s Modulus (MPa) | Poisson’s Ratio | Yield Stress (MPa) |
|---|---|---|---|---|
| Value | 940 | 0.1 | 0.45 | 2 × 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Hou, Z.; Zhang, J.; Yu, H.; Hao, J.; Liu, Y. Study on the Hole-Forming Performance and Opening of Mulching Film for a Dibble-Type Transplanting Device. Agriculture 2024, 14, 494. https://doi.org/10.3390/agriculture14030494
Zhao X, Hou Z, Zhang J, Yu H, Hao J, Liu Y. Study on the Hole-Forming Performance and Opening of Mulching Film for a Dibble-Type Transplanting Device. Agriculture. 2024; 14(3):494. https://doi.org/10.3390/agriculture14030494
Chicago/Turabian StyleZhao, Xiaoshun, Zhuangzhuang Hou, Jizong Zhang, Huali Yu, Jianjun Hao, and Yuhua Liu. 2024. "Study on the Hole-Forming Performance and Opening of Mulching Film for a Dibble-Type Transplanting Device" Agriculture 14, no. 3: 494. https://doi.org/10.3390/agriculture14030494