
Design and Test of a Low-Loss Soybean Header Based on Synchronous Profiling
Abstract
:1. Introduction
2. The Overall Structure and Working Principle of the Header
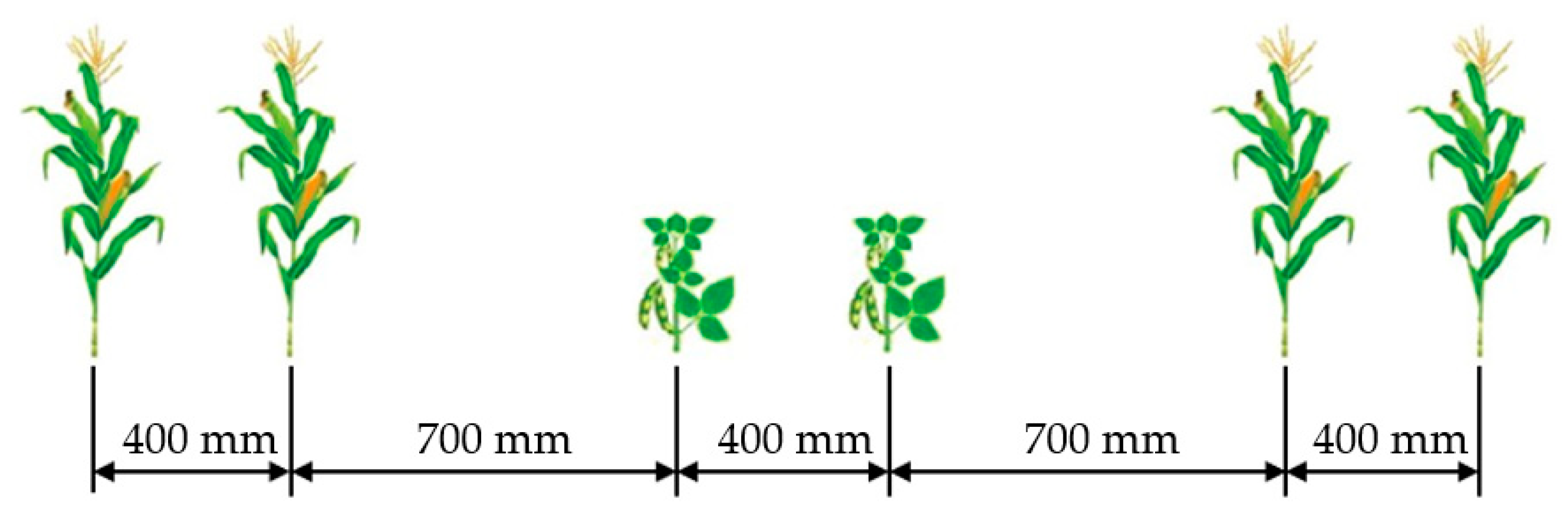
2.1. Requirements for Matching Machines for Soybean-Corn Strip Intercropping
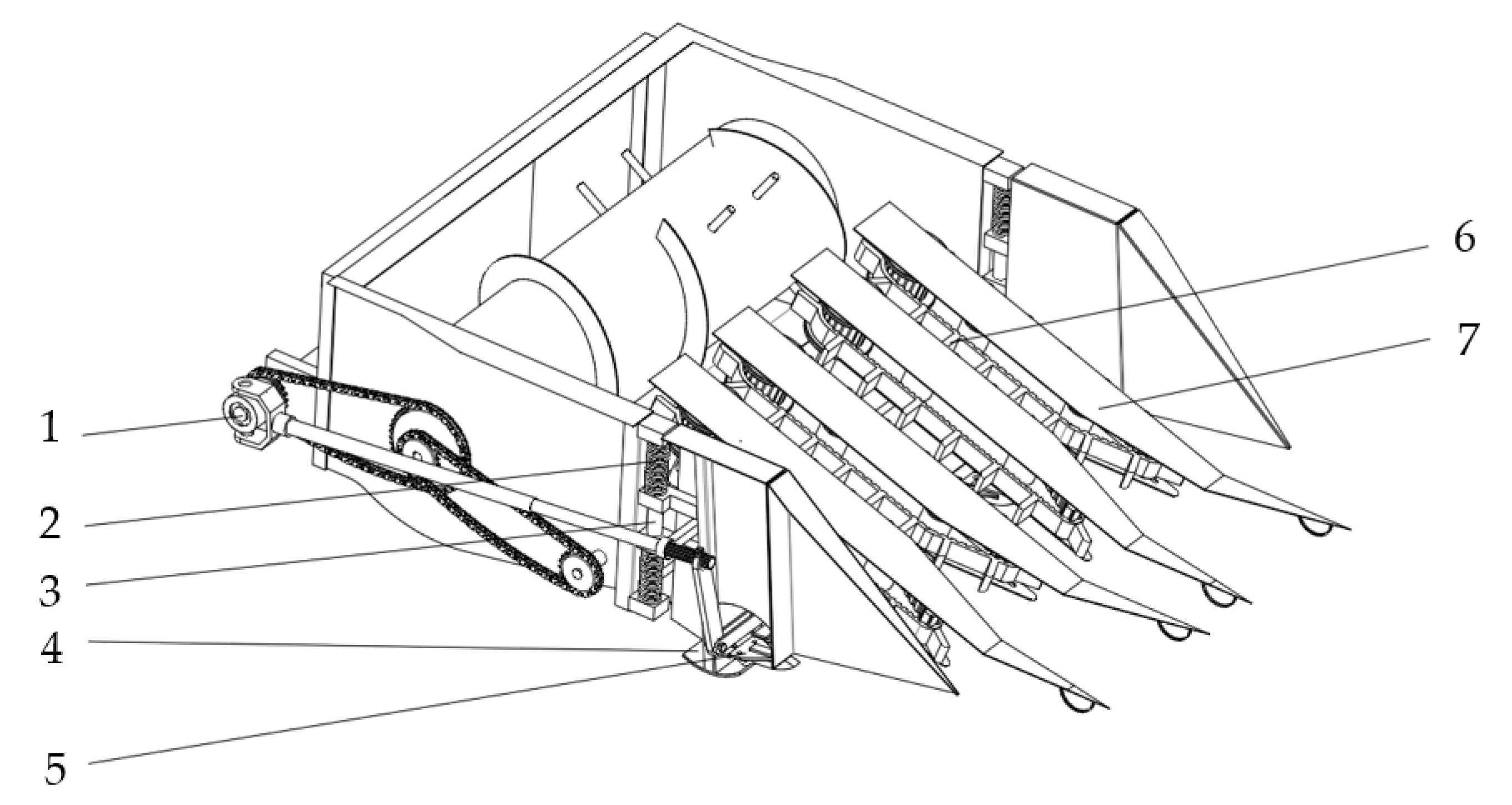
2.2. Overall Structure of the Header
3. Key Component Design
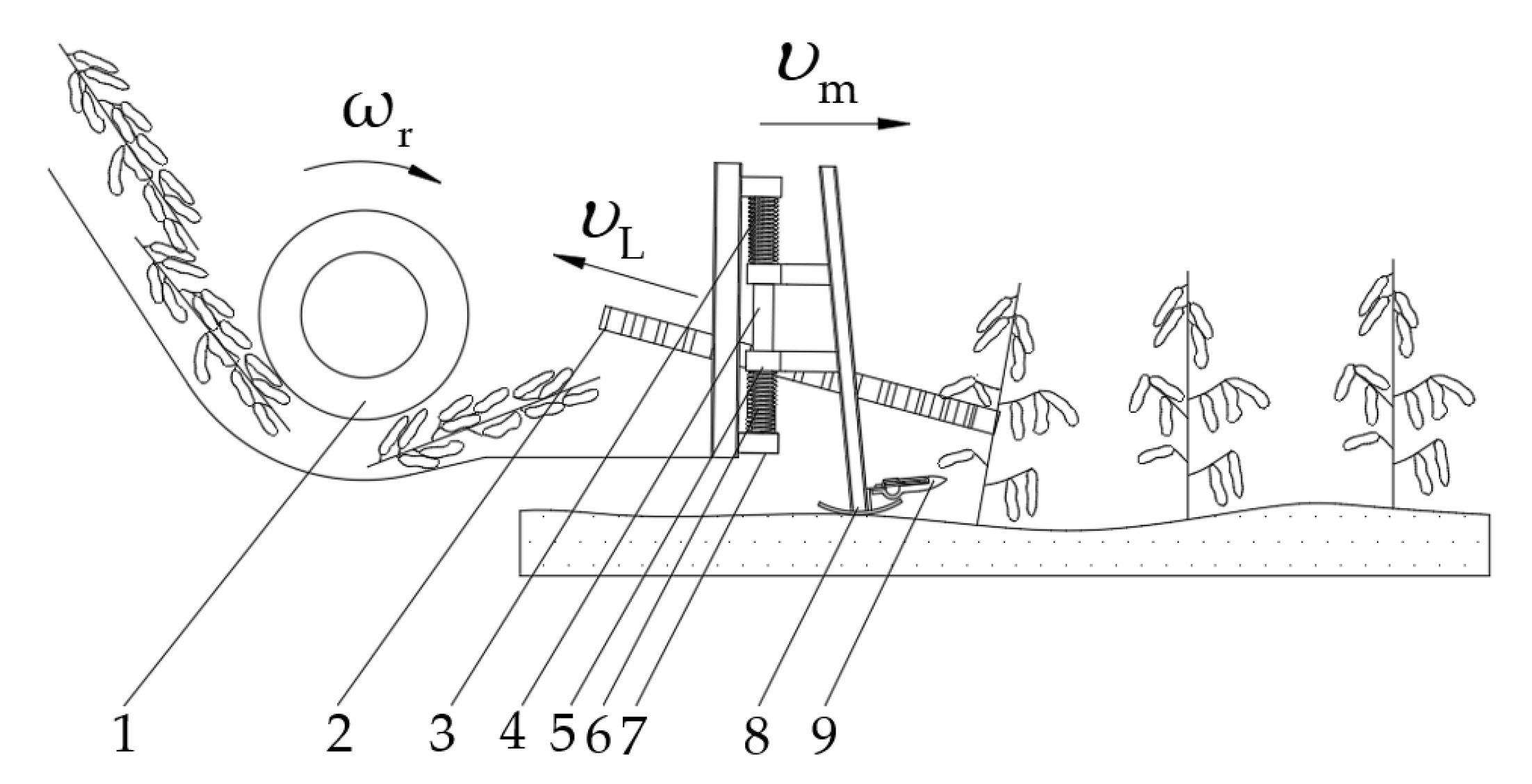
3.1. Synchronous-Profiling Cutting Device
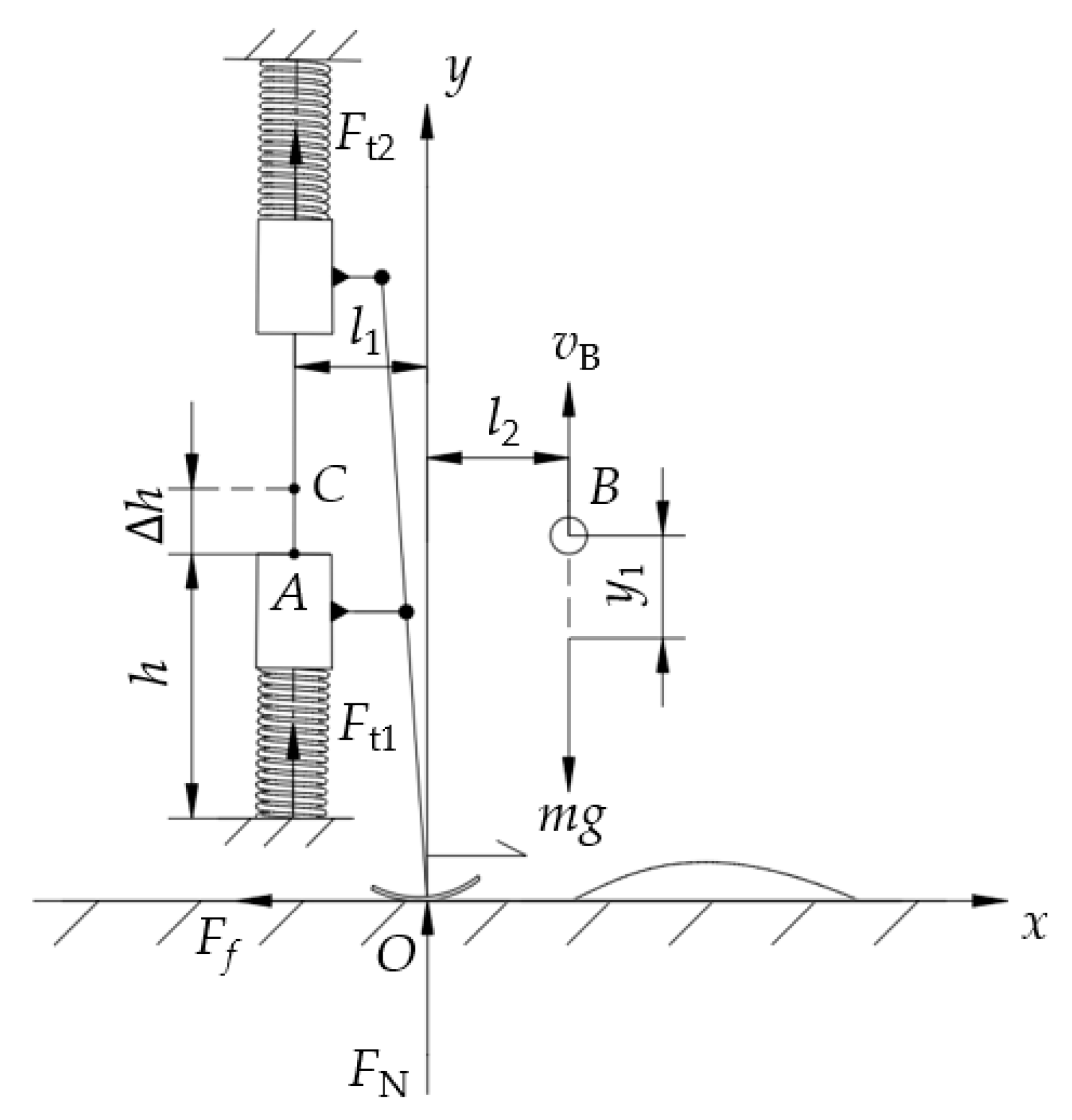
3.1.1. Dynamic Modeling of a Synchronous-Profiling Cutting Device
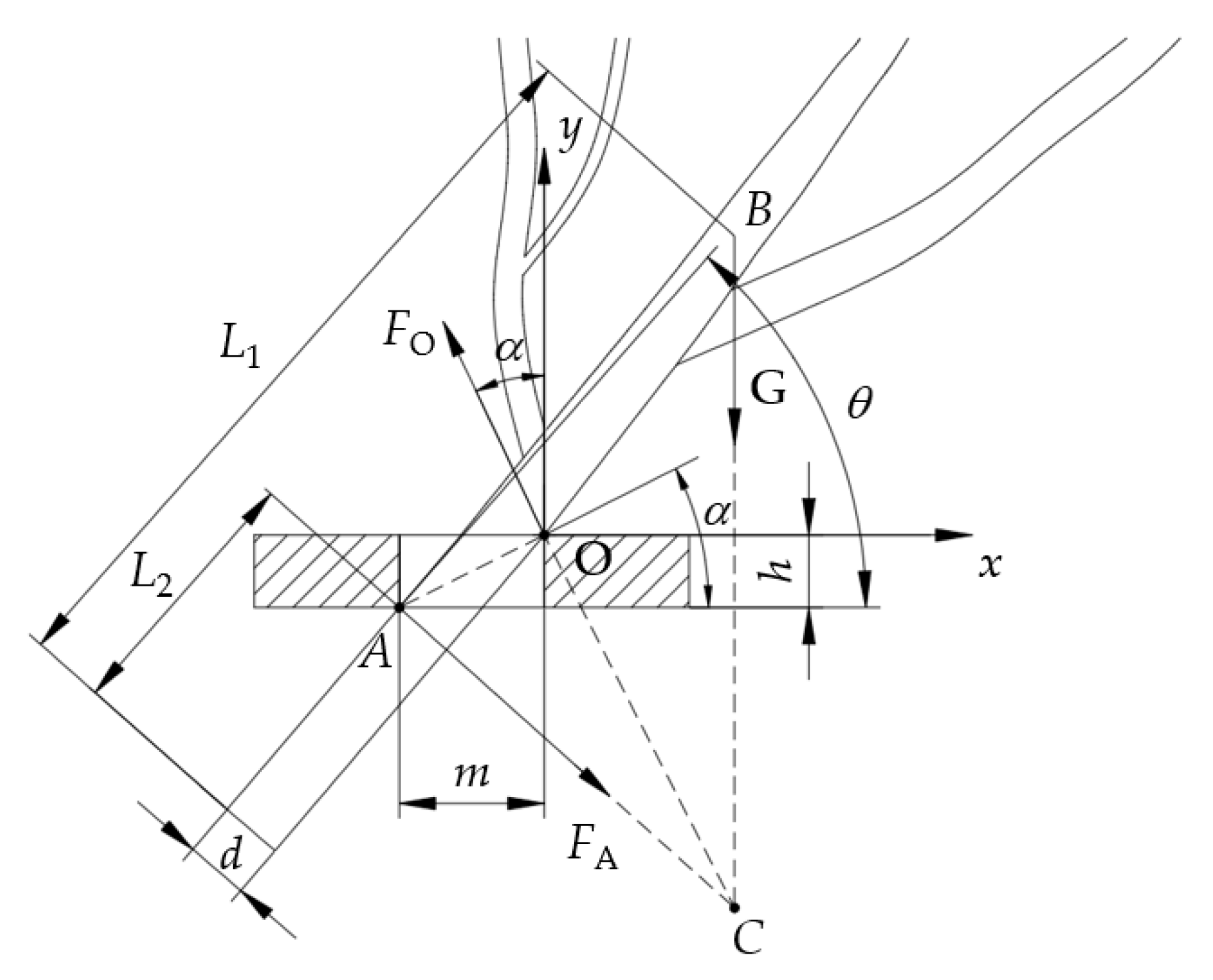
3.1.2. Force Analysis of a Synchronous Profiling Cutting Device
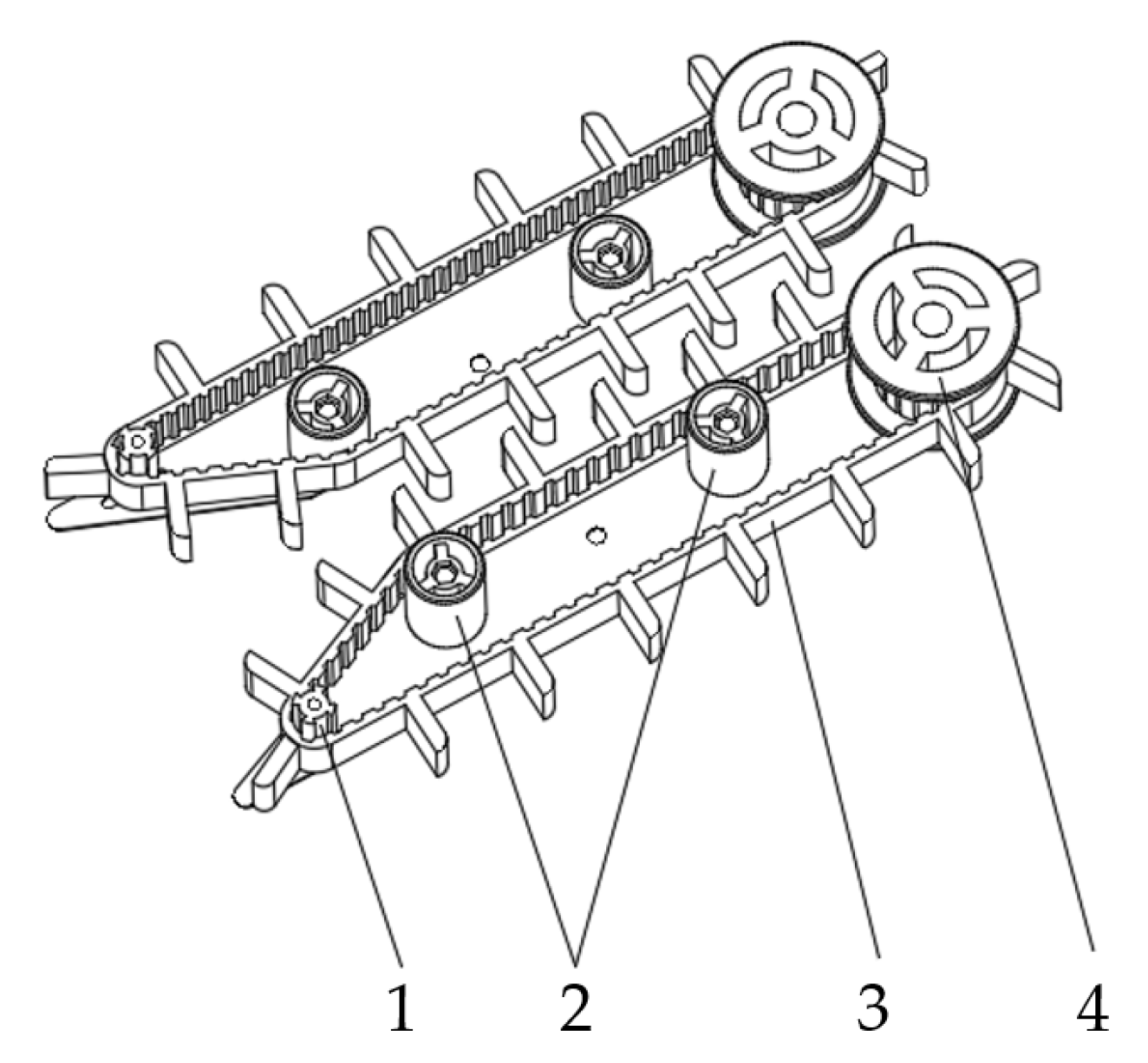
3.2. Design of a Flexible Reel-Belt Conveyor
4. Simulation Analysis of a Synchronous-Profiling Device Based on ADAMS Rigid-Flexible Coupling
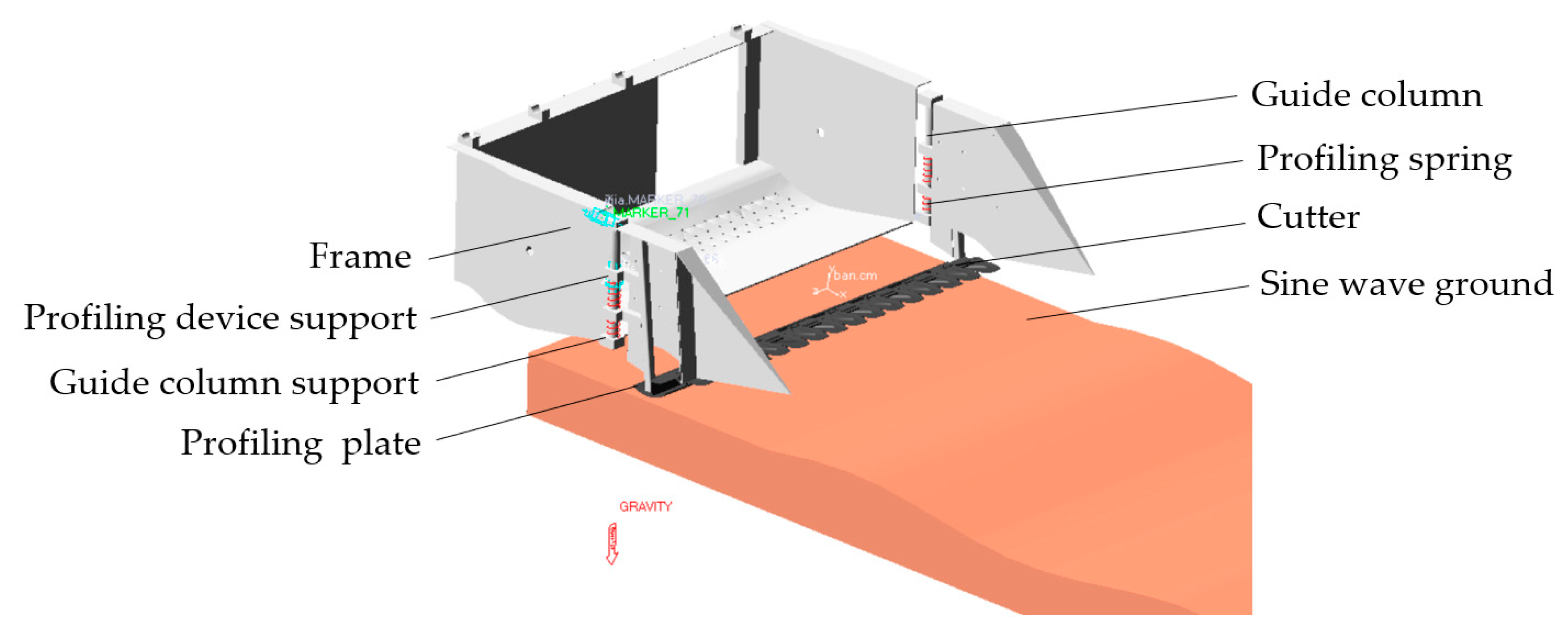
4.1. Simulation Model Establishment and Parameter Settings
4.1.1. Simulation Model
4.1.2. Parameter Setting of a Simulation Model
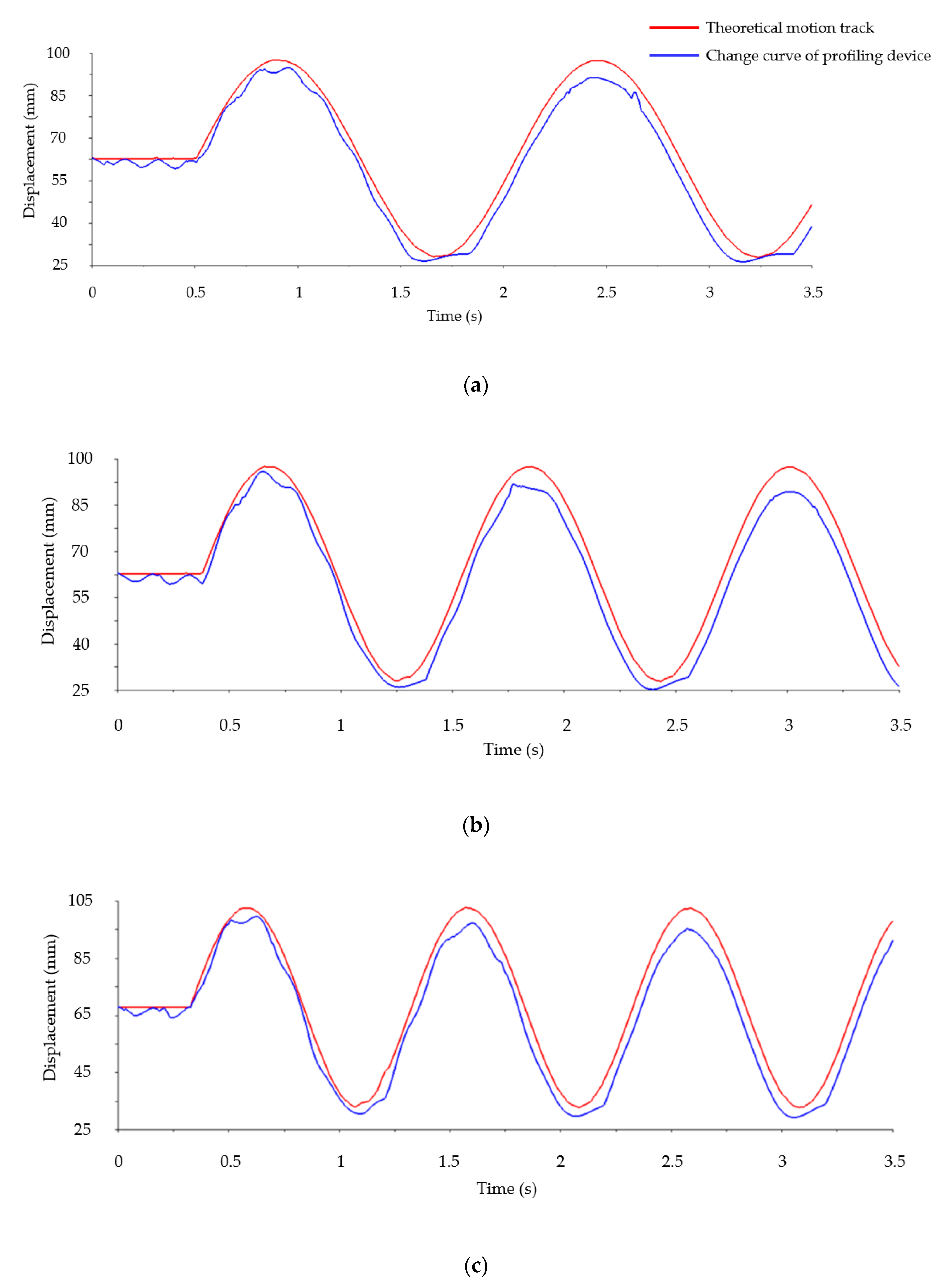
4.2. Analysis of Simulation Results
5. Field Test
5.1. Test Conditions
5.2. Test Method
5.3. Analysis of Test Results
6. Conclusions
- (1)
- A low-loss soybean header based on synchronous profiling was designed to address the problems of a lack of soybean harvesting machines for supporting soybean-corn strip intercropping, the few existing soybean headers, and the high loss rate of soybean headers.
- (2)
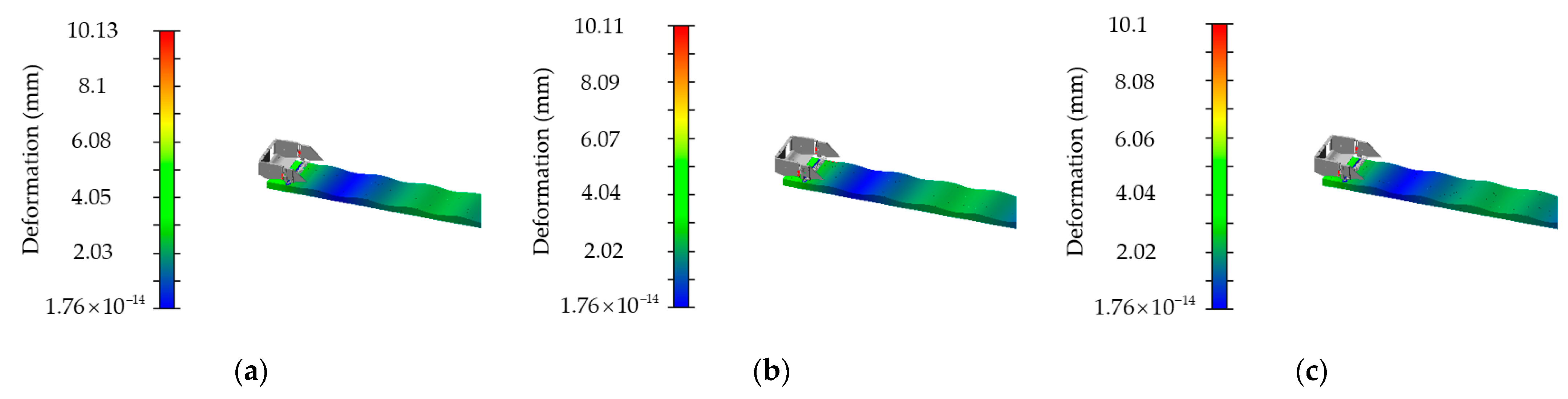
- In order to realize the cutting device attached to the undulating ground, a synchronous-profiling cutting device was designed. The spring stiffness was determined to be 6 N/mm by theoretical and dynamic analyses. The simulation analysis of the motion process of the synchronous-profiling cutting device was conducted through ADAMS rigid-flexible coupling, indicating that the profiling cutting device can effectively control the height of the cutter off the ground in real-time by following the fluctuations of the ground. The cutting device can respond to the ground excitation accurately and quickly, which meets the requirements of synchronous profiling and low-cutting.
- (3)
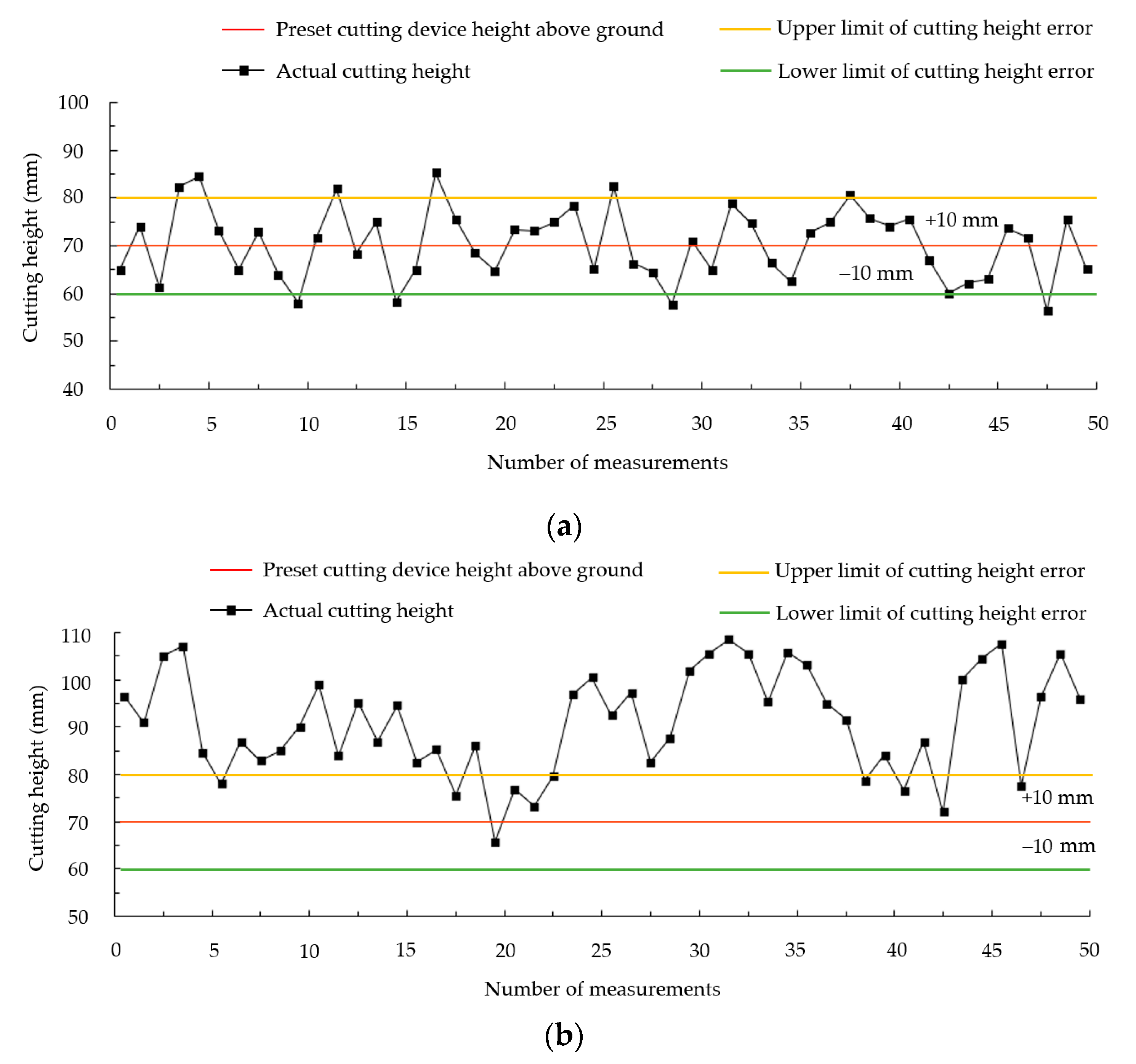
- Field test results showed that the loss rate and stubble height of the soybean header were 1.34% and 70.36 mm, respectively, which were 55% and 22.7% lower than the existing reel-type rigid soybean header and met the requirements of the soybean harvesting operation index.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, W.; Yang, F. Developing Maize-Soybean Strip Intercropping for Demand Security of National Food. Sci. Agric. Sin. 2019, 52, 3748–3750. [Google Scholar]
- Luo, H.; Jiang, X.; Qin, D.; Zuo, P.; Zhang, F.; Zhang, L. Design and Experiment of Narrow Row Spacing and Low-Damage Corn Picking Header. J. Northeast Agric. Univ. 2021, 52, 66–76. [Google Scholar]
- Wu, Y.; Gong, W.; Yang, F.; Wang, X.; Yong, T.; Liu, J.; Pu, T.; Yan, Y.; Yang, W. Dynamic of recovery growth of intercropped soybean after maize harvest in maize-soybean relay strip intercropping system. Food Energy Secur. 2022, 11, e350. [Google Scholar] [CrossRef]
- Liu, J.; Jin, C.; Liang, S.; Ni, Y. The Research of Soybean Harvested by Machine. J. Agric. Mech. Res. 2017, 39, 1–9+15. [Google Scholar]
- Chaab, R.; Karparvarfard, S.; Rahmanian-Koushkaki, H.; Mortezaei, A.; Mohammadi, M. Predicting Header Wheat Loss in a Combine Harvester, a New Approach. J. Saudi Soc. Agric. Sci. 2020, 19, 179–184. [Google Scholar] [CrossRef]
- Guo, S.; Xu, J. Development Status and Existing Problems of Soybean Food Industry in China. J. Food Sci. Technol. 2023, 41, 1–8. [Google Scholar]
- Luo, Y. On Farm Harvest and Storage Losses of Oil Crops and the Impact on Resources and Environment in China. Chin. J. Oil Crop Sci. 2022, 44, 249–256. [Google Scholar]
- Arends-Kuenning, M.; Garcias, M.; Kamei, A.; Shikida, P.; Romani, G. Factors associated with harvest and postharvest loss among soybean farmers in Western Parana State, Brazil. Food Policy 2022, 112, 102363. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, M.; Han, Y.; Zhu, J. Investigation on the Mechanical Harvest Loss of Soybean—A case study of soybean in Heilongjiang and Inner Mongolia. Agric. Sci. Eng. China 2017, 29, 16–20. [Google Scholar]
- Xia, X.; Yang, G.; Chen, Q.; Song, Z.; Mei, S.; Jin, Y. Analysis on loss reduction technology and strategy for combined harvesting process of food legumes. J. Chin. Agric. Mech. 2022, 43, 13–19+25. [Google Scholar]
- Kassen, D.; Kelkar, A. Combine harvester header height control via robust feedback linearization. In Proceedings of the 2017 Indian Control Conference (ICC), Guwahati, India, 4–6 January 2017; pp. 1–6. [Google Scholar]
- Tulpule, P.; Kelkar, A. Integrated robust optimal design (IROD) of header height control system for combine harvester. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2699–2704. [Google Scholar]
- Ni, Y.; Jin, C.; Chen, M.; Yuan, W.; Qian, Z.; Yang, T.; Cai, Z. Computational model and adjustment system of header height of soybean harvesters based on soil-machine system. Comput. Electron. Agric. 2021, 183, 105907. [Google Scholar] [CrossRef]
- Li, Z. Design of Soybean Profiling Header and Control System for Multi-Crop Crawler Combine Harvester. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar]
- Jin, C.; Liu, G.; Ni, Y.; Yang, T.; Wang, T.; Qi, Y. Design and experiment of header profiling mechanism for combine harvester based on MBD-DEM coupling. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–10. [Google Scholar]
- Xie, H. Design and Experiment of Belt Conveyor Header for Soybean Combine Harvester. Master’s Thesis, Shandong University of Technology, Zibo, China, 2019. [Google Scholar]
- Xu, F.; Zhang, L.; Peng, J.; Yang, H.; Wang, Y. Development status and trend of special machine for soybean and corn strip compound planting. J. Chin. Agric. Mech. 2023, 44, 1–8. [Google Scholar]
- Yang, H. Parameters Optimization of Harvester Threshing Unit and Appropriate Agronomic Characteristics of Machine-harvested Soybean in Relay Strip Intercropping. Master’s Thesis, Sichuan Agricultural University, Chengdu, China, 2018. [Google Scholar]
- Zhang, B.; Li, Z. A discussion on Lagrange’s equation and its application. J. Shijiazhuang Railw. Inst. 1990, 3, 55–63. [Google Scholar]
- Kong, F.; Wang, D.; Shi, L.; Wu, T.; Chen, C.; Sun, Y.; Xie, Q. Design and experiment of disc-cutting picking device of castor. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–9. [Google Scholar]
- Yin, Q.; Li, Y.; Ji, B.; Chen, L. Design and Experiment of Clamping and Conveying Device for Self Propelled Reed Harvester. J. Agric. Mech. Res. 2023, 45, 113–118. [Google Scholar]
- Chinese Academy of Agricultural Mechanization Sciences. Agricultural Machinery Manual; China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Ren, L.; Zhang, L.; Ding, G.; Yang, W.; Wang, X.; Yong, T.; Kong, F.; Dai, J. Design and experiment of a type of 2BF-5 maize-soybean strip intercropping precision seeder. J. Henan Agric. Univ. 2019, 53, 207–212+226. [Google Scholar]
- Guan, Z.; Jiang, T.; Li, H.; Wu, C.; Zhang, M.; Wang, G.; Mu, S. Analysis and test of the laying quality of inclined transportation rape windrower. Trans. Chin. Soc. Agric. Eng. 2021, 37, 59–68. [Google Scholar]
- Ni, Y.; Jin, C.; Wang, T.; Zhou, L.; Liu, Z. Design and experiments of the 4LZ-1.5 soybean combine harvester. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–11. [Google Scholar]
- Chen, Z.; Xue, Z.; Zhang, S.; Li, L. Closing Effort Analysis of Sliding Doors Based on Co-simulation of ADAMS and Simulink. China Mech. Eng. 2020, 31, 924–930. [Google Scholar]
- Zhou, J.; Gao, Y.; Wang, D.; Xiao, J.; Wang, Z. Artillery launch dynamic simulation based on ADAMS. J. Vib. Shock 2020, 39, 135–140. [Google Scholar]
- Geng, A.; Zhang, M.; Zhang, J.; Zhang, Z.; Gao, A.; Zheng, J. Design and Experiment of Automatic Control System for Corn Header Height. Trans. Chin. Soc. Agric. Mach. 2020, 51, 118–125. [Google Scholar]
- Wang, Y.; Fang, L.; Zhou, S. Design of Bionic Variable Stiffness Joint. Trans. Chin. Soc. Agric. Mach. 2018, 49, 390–396. [Google Scholar]
- Shi, Y.; Chen, X.; Chen, M.; Wang, D.; Shang, S. Design and Experiment on Ploughshare Furrowing Ridging Device of Sweet Potato Ridging Shaping Machine. Trans. Chin. Soc. Agric. Mach. 2022, 53, 16–25. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Parameter | Value |
|---|---|---|
| 1 | Chassis type | 4LZ |
| 2 | Matching engine power (kW) | 44.2 |
| 3 | Overall dimensions (mm × mm × mm) | 4230 × 1500 × 2300 |
| 4 | Overall machine mass (kg) | 2410 |
| 5 | Header width (mm) | 1300 |
| 6 | Number of rows | 2 |
| 7 | Operating efficiency (hm2/h) | 0.27–0.48 |
| Performance Parameter | Test Number | Average Value of the Test | Performance Index of the Existing Reel-Type Rigid Soybean Header | Technical Requirement | ||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| Header loss rate (%) | 1.26 | 1.44 | 1.33 | 1.34 | 2.98 | ≤3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, J.; Luo, H.; Zhou, Y.; Li, Q.; Qiu, Q.; Zhang, L. Design and Test of a Low-Loss Soybean Header Based on Synchronous Profiling. Agriculture 2023, 13, 1580. https://doi.org/10.3390/agriculture13081580
Nie J, Luo H, Zhou Y, Li Q, Qiu Q, Zhang L. Design and Test of a Low-Loss Soybean Header Based on Synchronous Profiling. Agriculture. 2023; 13(8):1580. https://doi.org/10.3390/agriculture13081580
Chicago/Turabian StyleNie, Junshan, Huizhong Luo, Yang Zhou, Qiqiang Li, Qingyu Qiu, and Lihua Zhang. 2023. "Design and Test of a Low-Loss Soybean Header Based on Synchronous Profiling" Agriculture 13, no. 8: 1580. https://doi.org/10.3390/agriculture13081580