
Design and Experiment of Sweet Potato Ridging and Forming Machine
Abstract
:1. Introduction
2. Materials and Methods
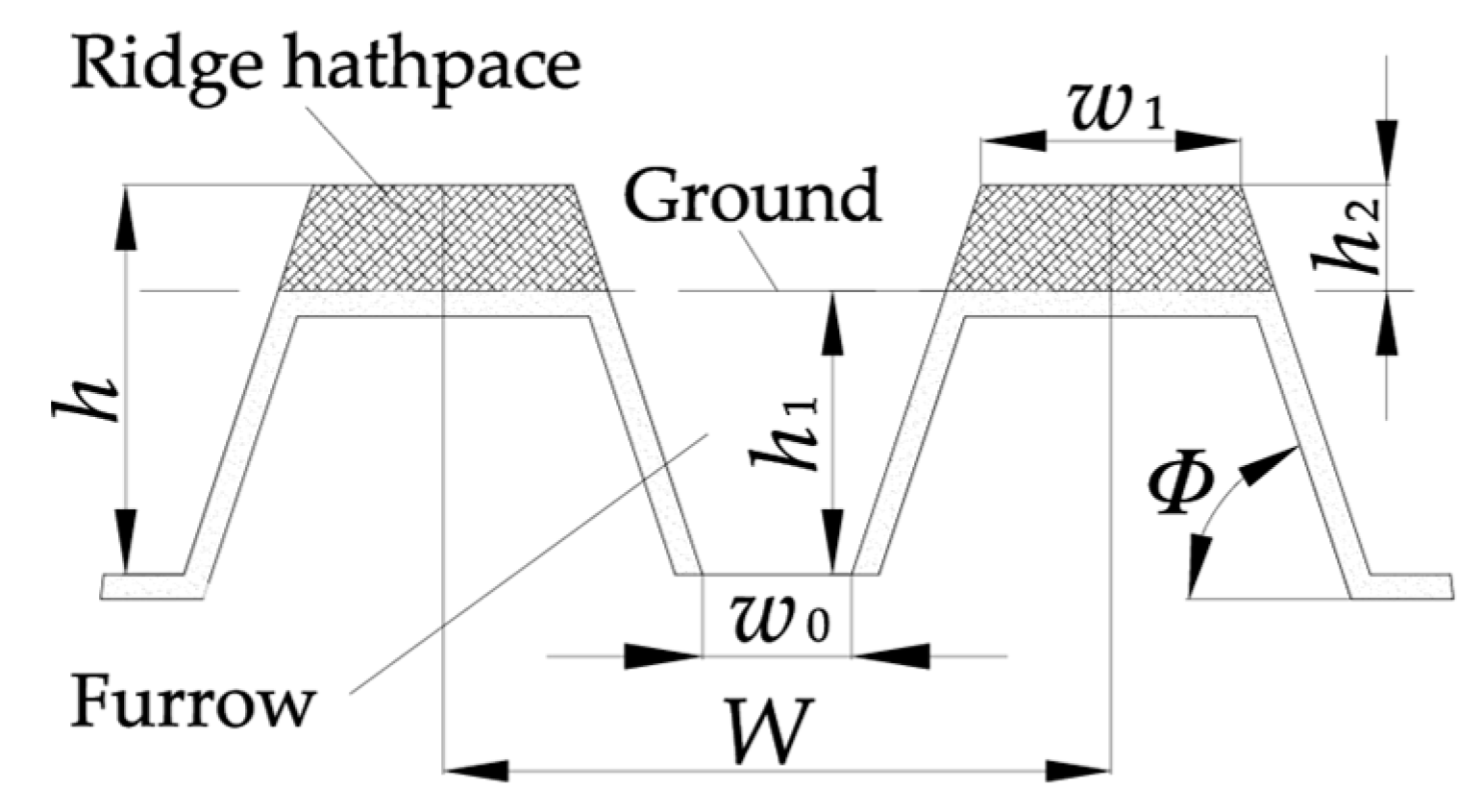
2.1. Agronomic Requirement
2.2. Overall Structure and Working Principles
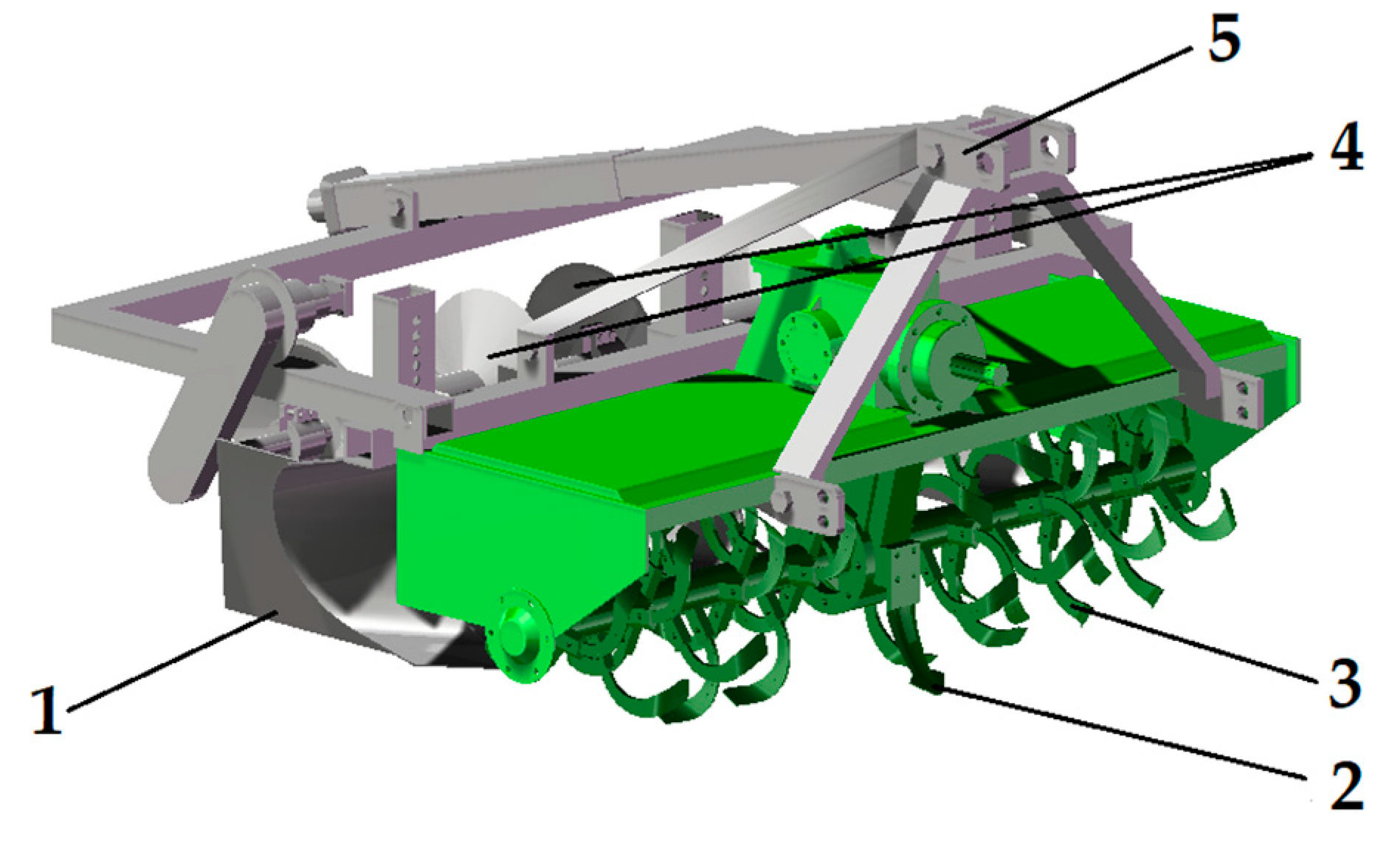
2.2.1. Overall Structure
2.2.2. Working Principle
2.3. Key Components Structural Parameters Determination
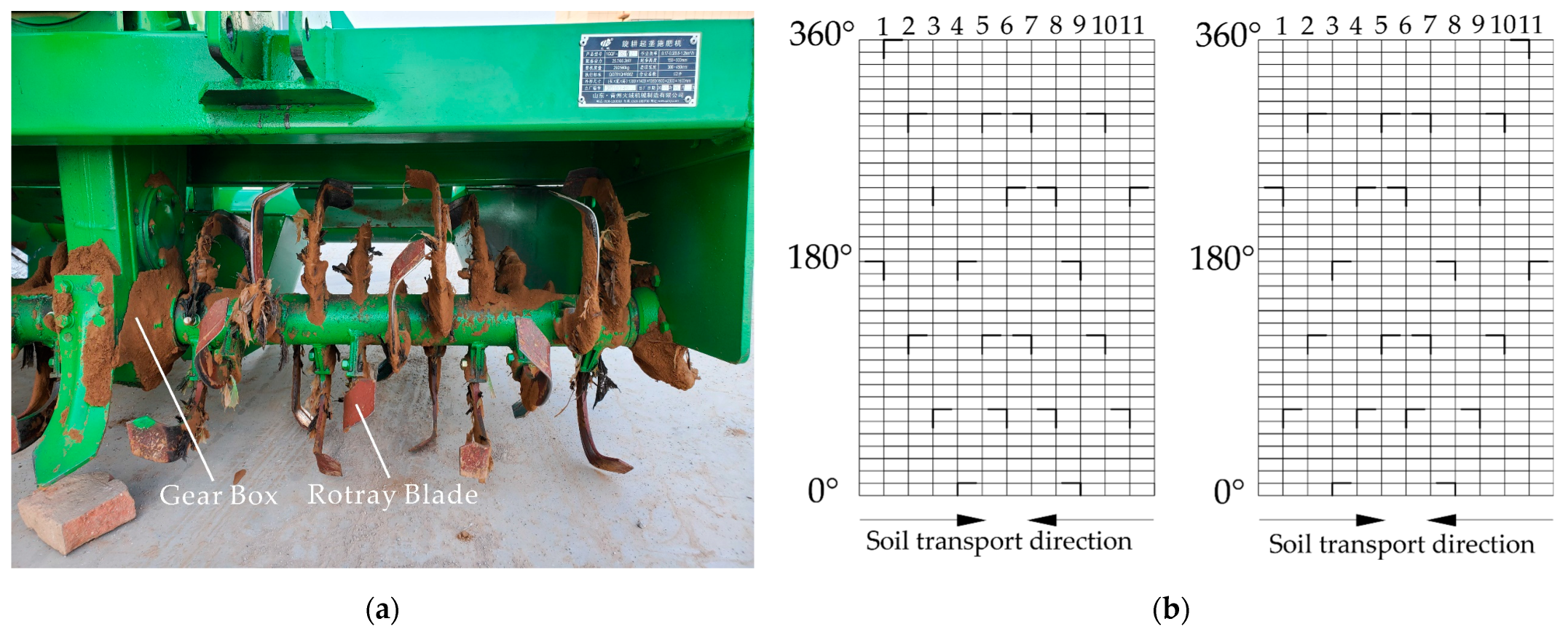
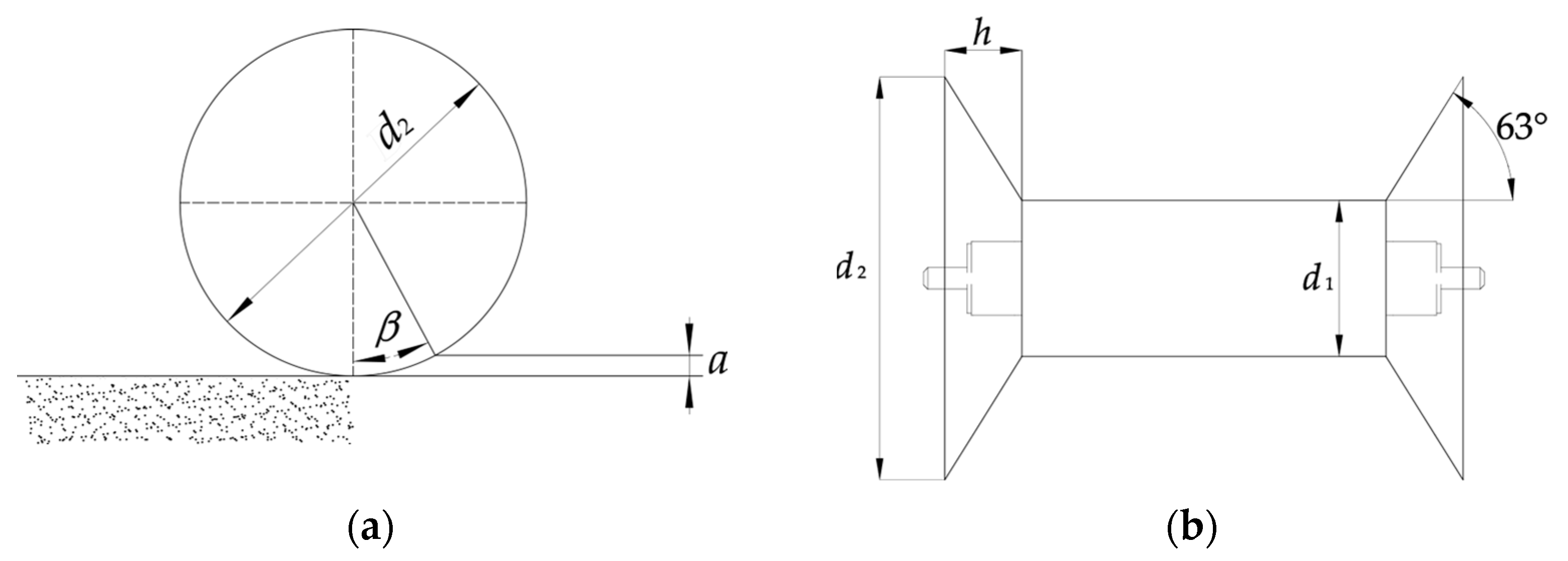
2.3.1. Rotary Tillage Device
2.3.2. Pressing and Shaping Device

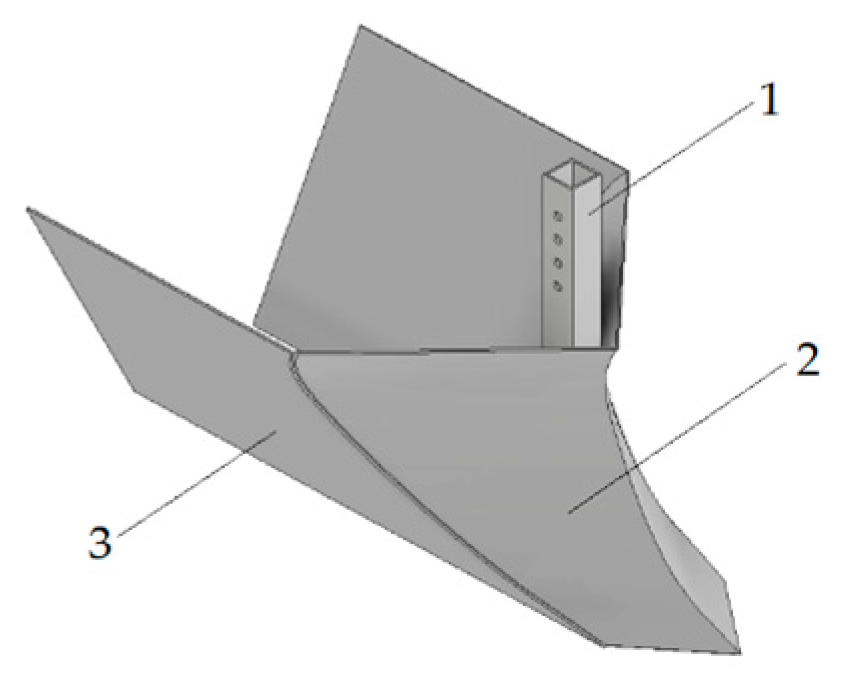
2.4. Design of Plowshare Furrowing and Ridging Device
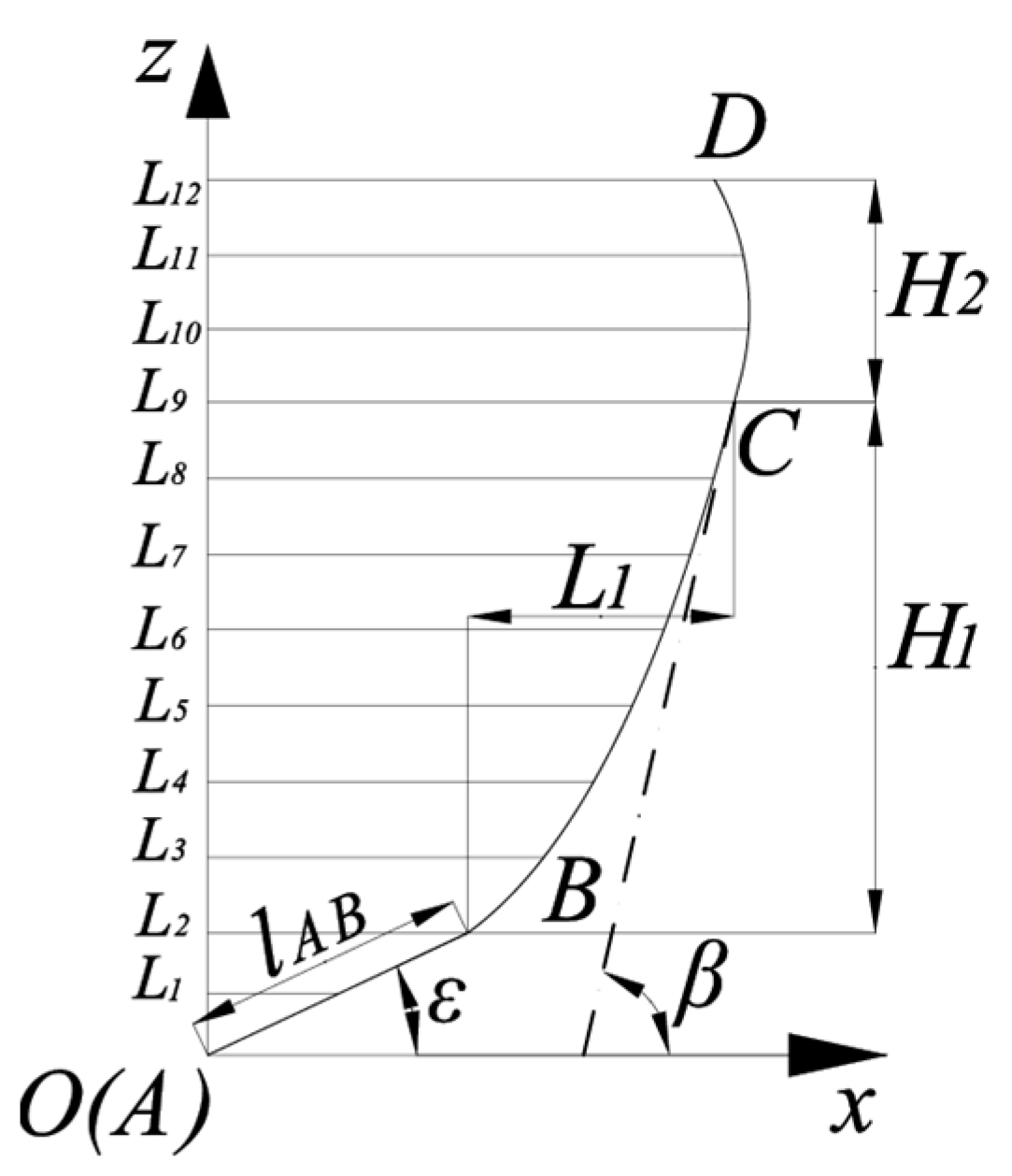
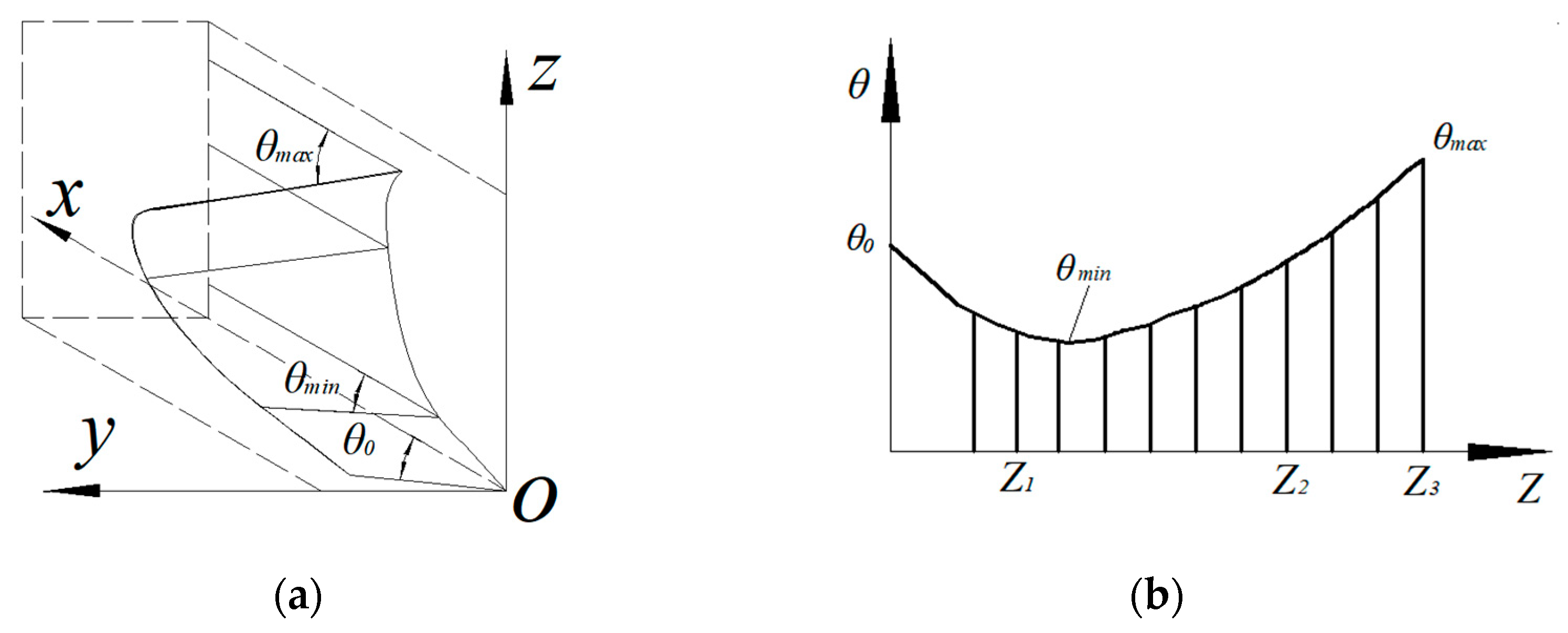
2.4.1. Design of Furrowing Surface
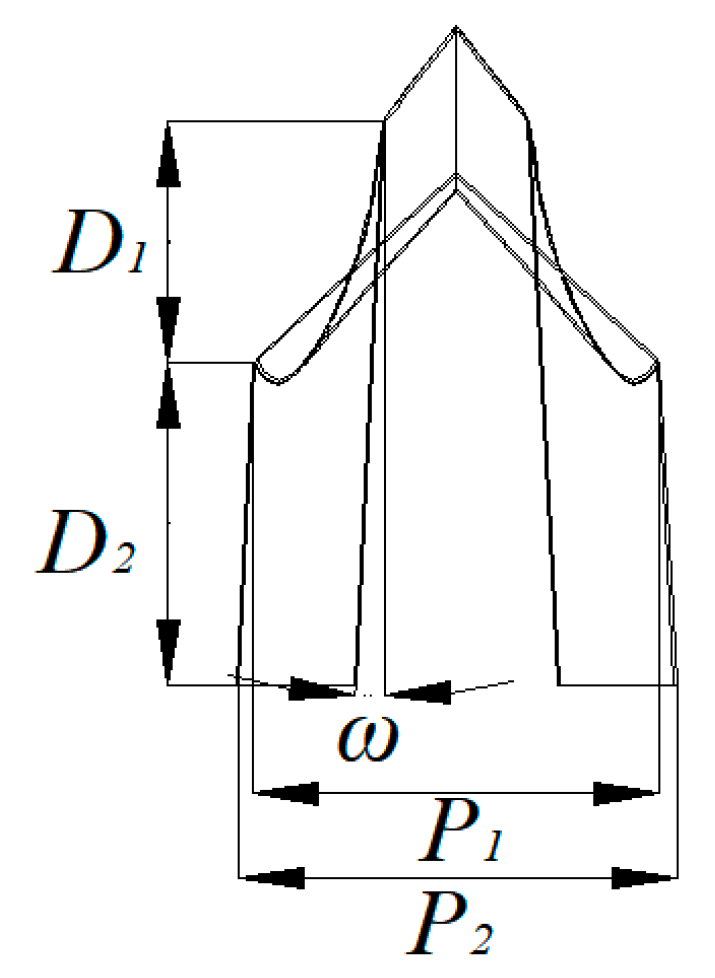
2.4.2. Design of Wing Plate
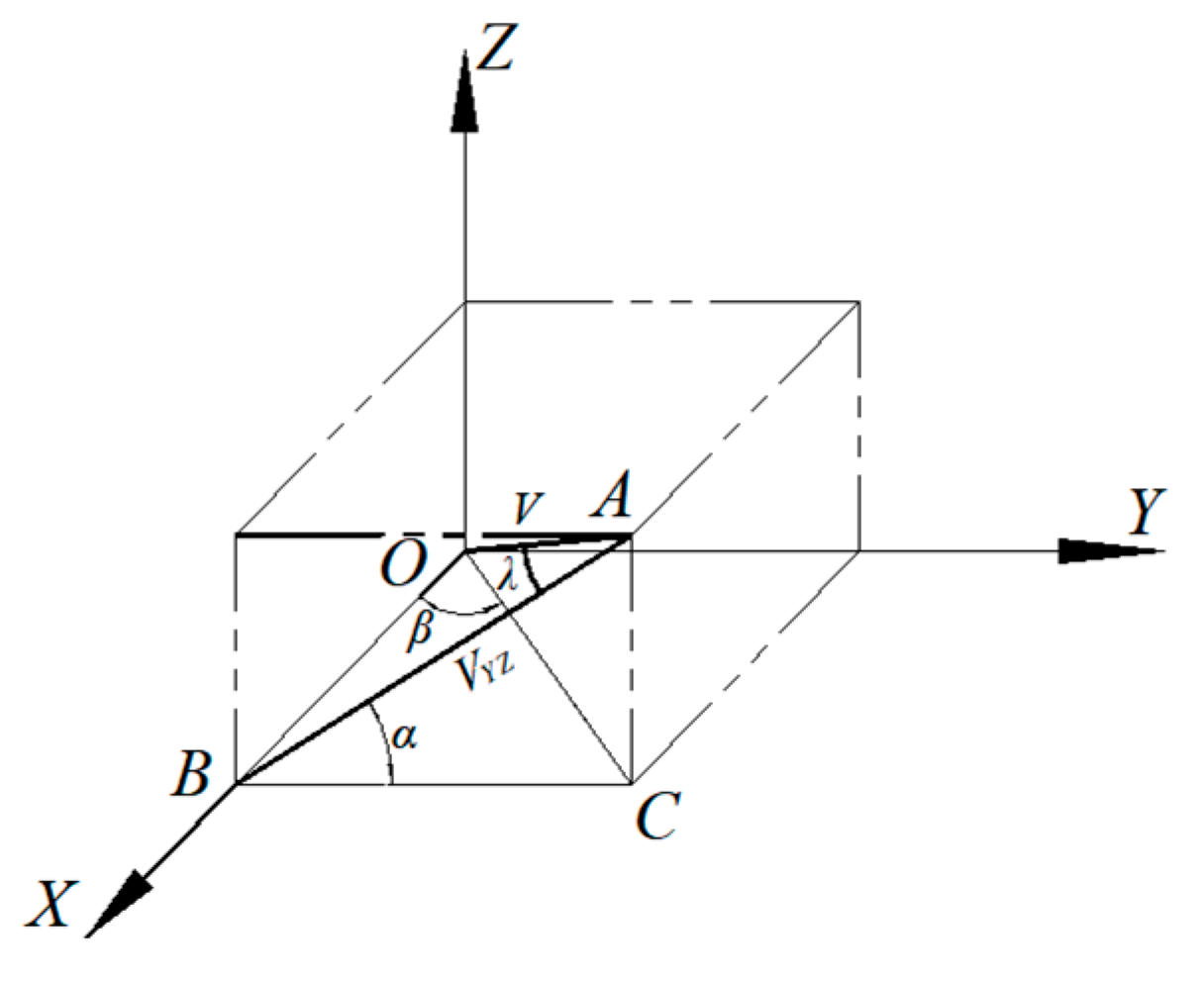
2.4.3. Soil Kinematics Analysis
- (1)
- Soil motion on the furrowing surface.
- (2)
- Soil motion after leaving the furrowing surface.
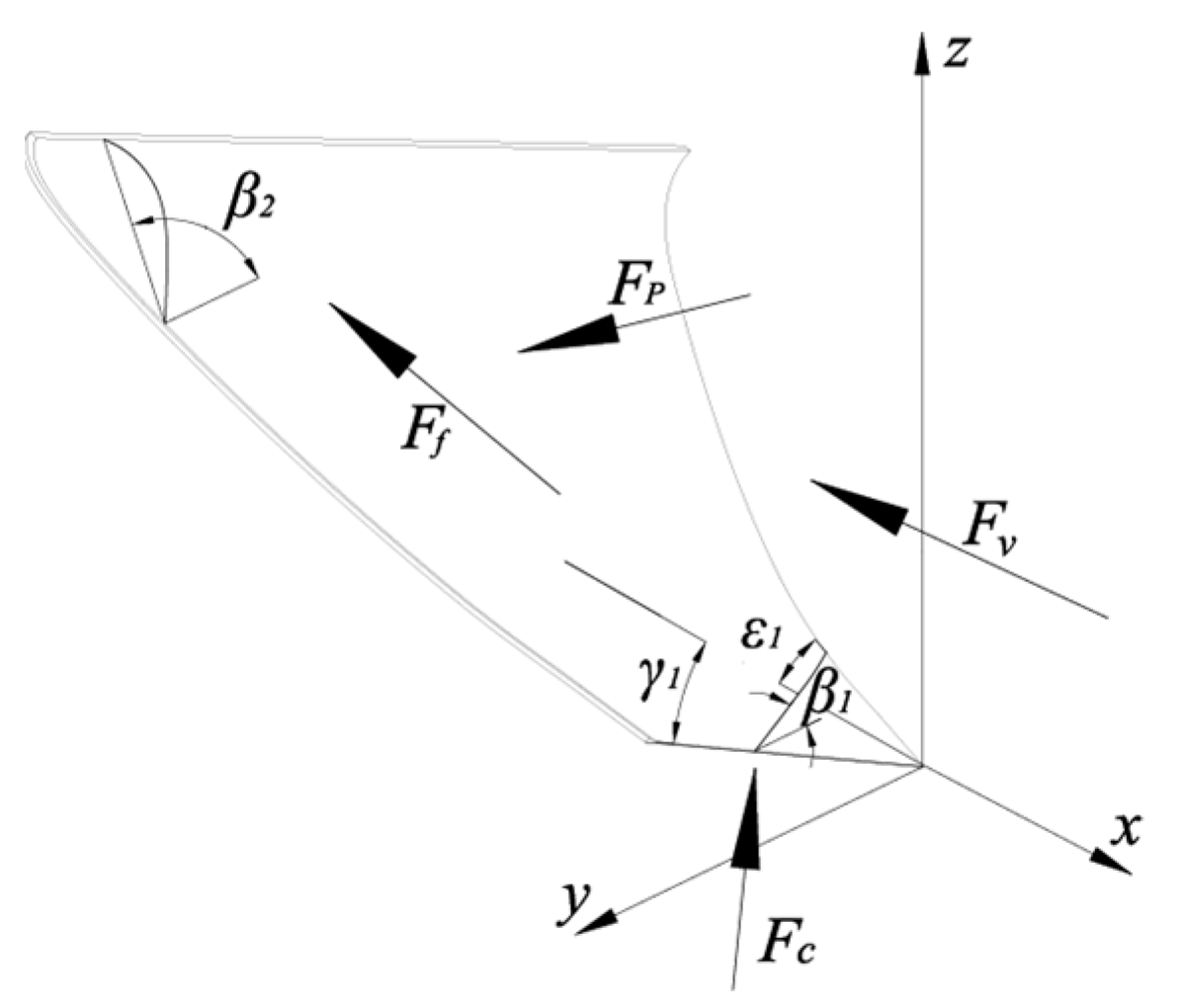
2.4.4. Force Analysis of Furrowing Surface
- (1)
- The cutting force FC of the surface on the soil.
- (2)
- The total pressure FP of the soil on the surface.
- (3)
- Frictional resistance Ff between soil and furrowing surface.
- (4)
- Frictional resistance Ff between soil and furrowing surface.
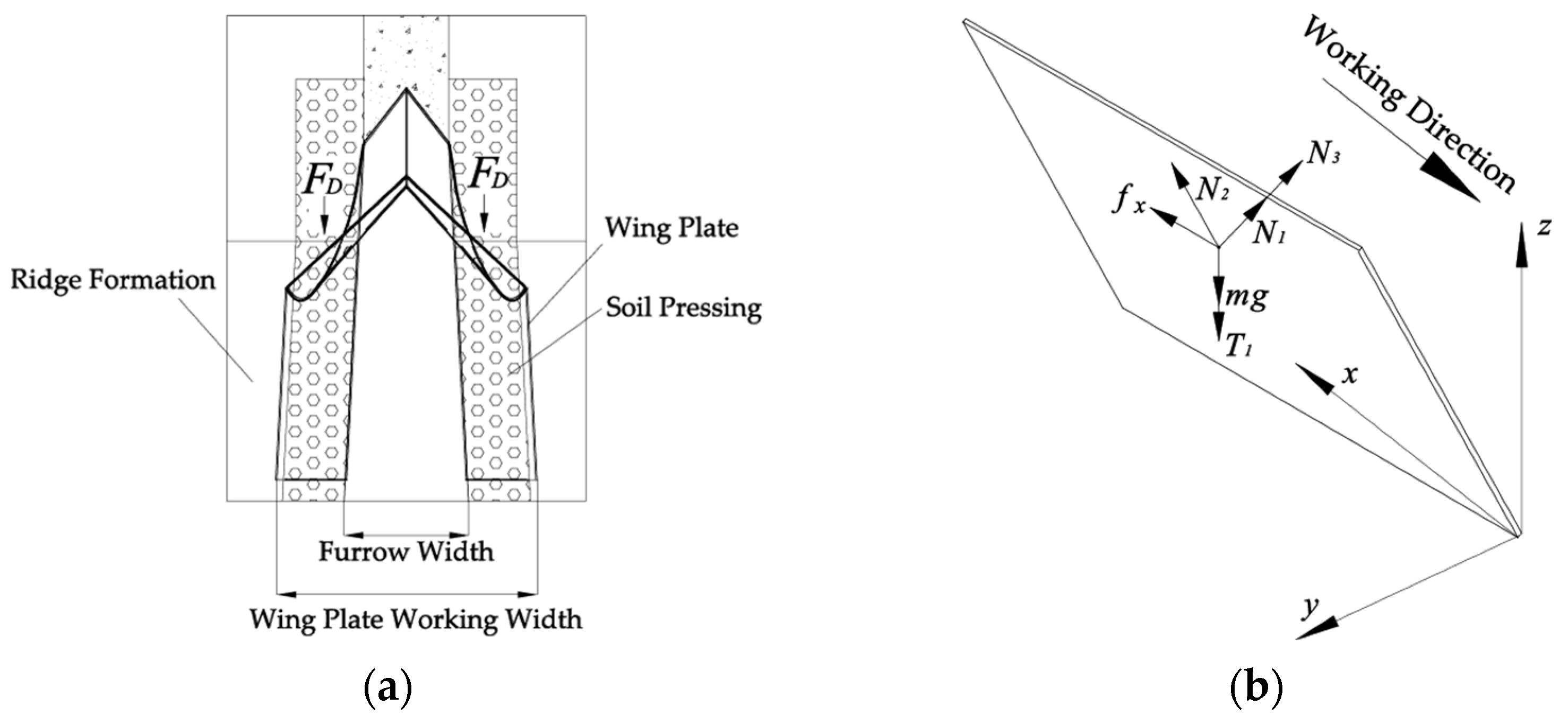
2.4.5. Force Analysis of Wing Plate
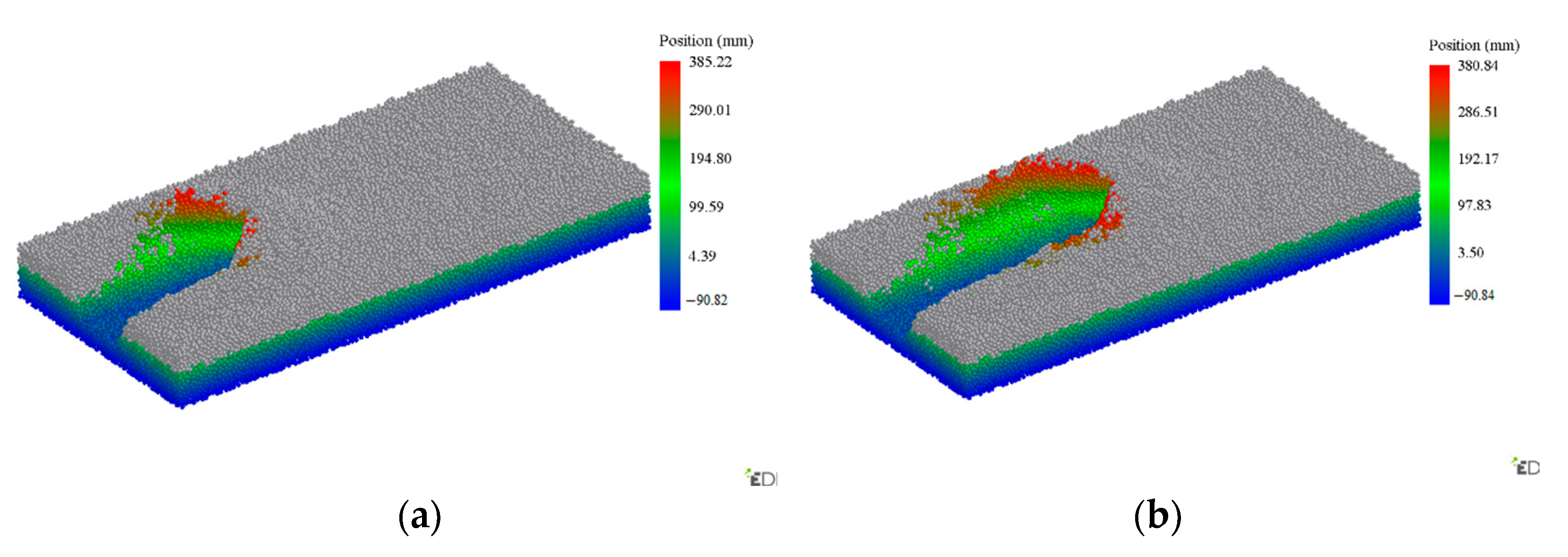
2.5. Analysis of Soil Particle Motion Based on EDEM
2.5.1. Simulation Model Building of EDEM
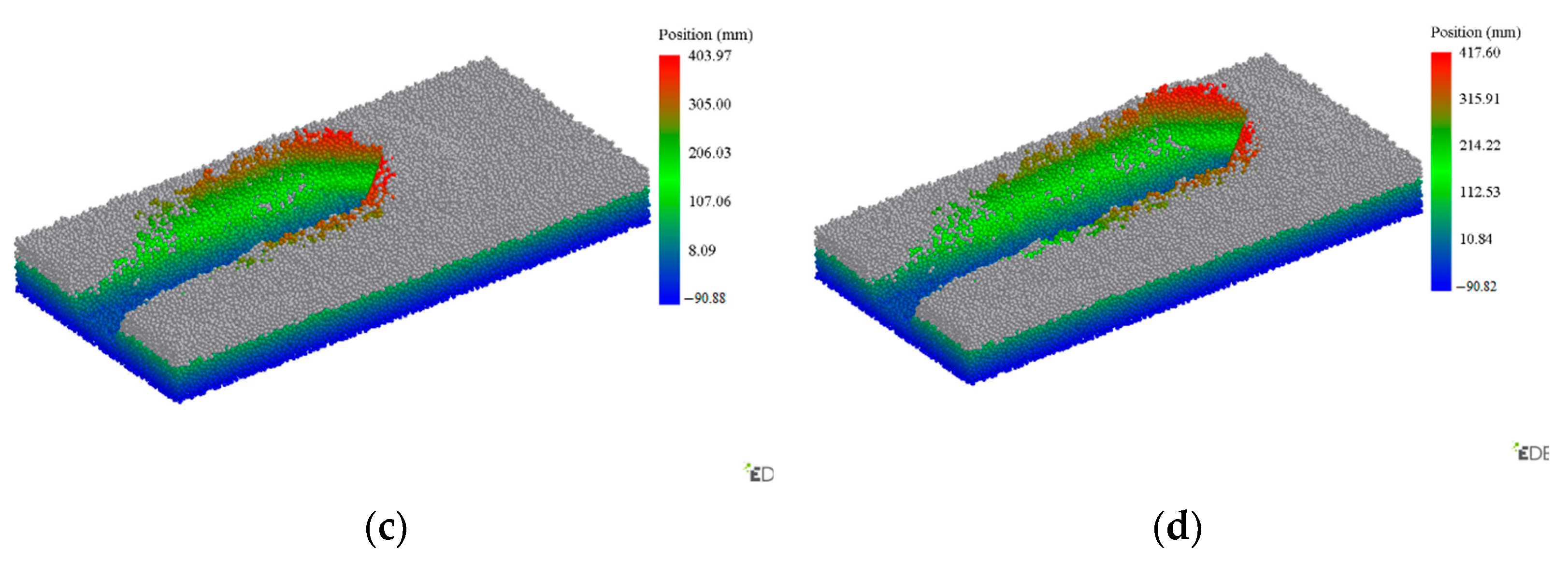
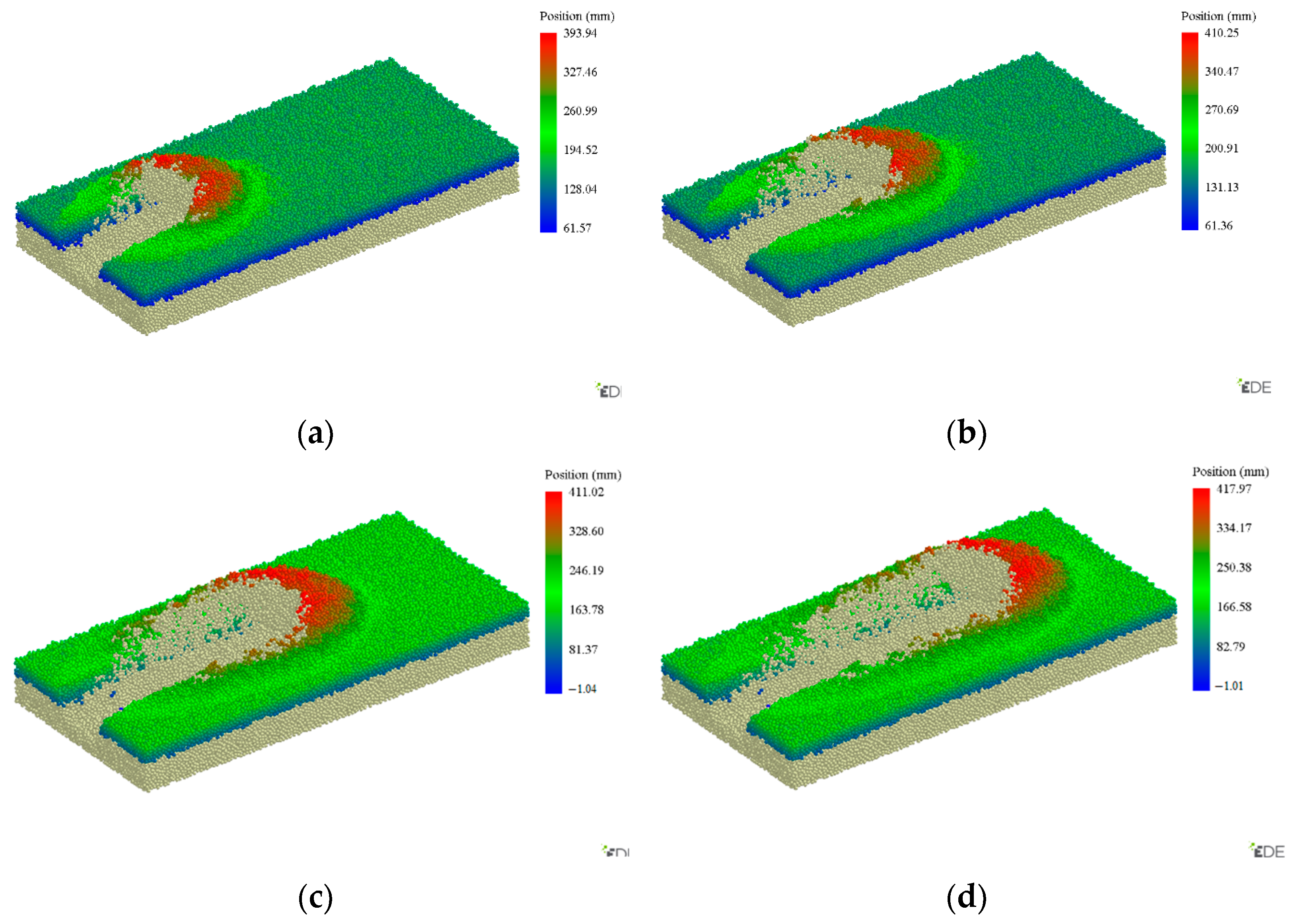
2.5.2. Analysis of Soil Motion Pattern in Plow Sole
2.5.3. Analysis of Soil Motion Pattern in Plough Layer
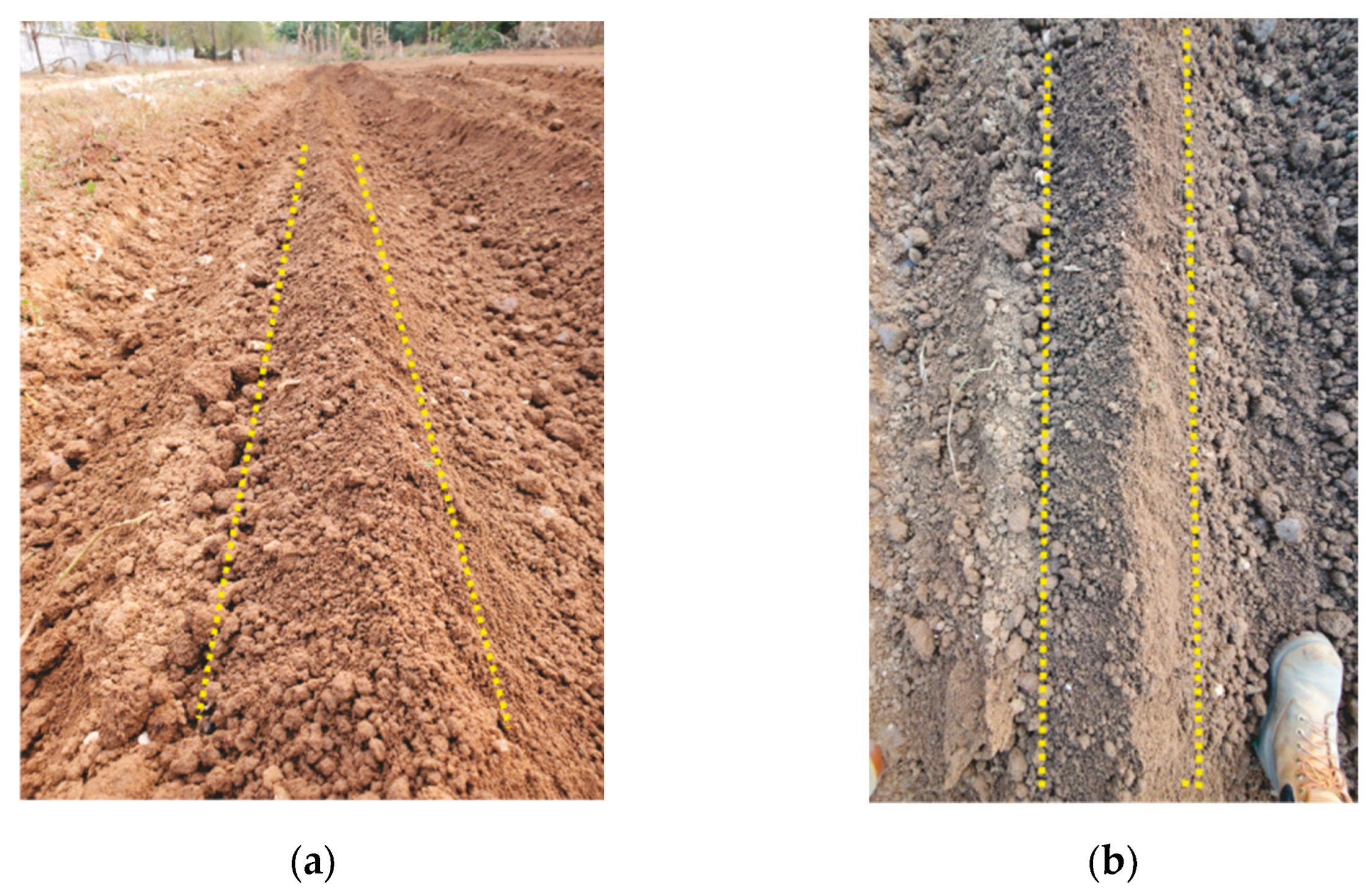
2.5.4. Verification Test of Plowshare Furrowing and Ridging Device
2.6. Field Test
2.6.1. Test Condition
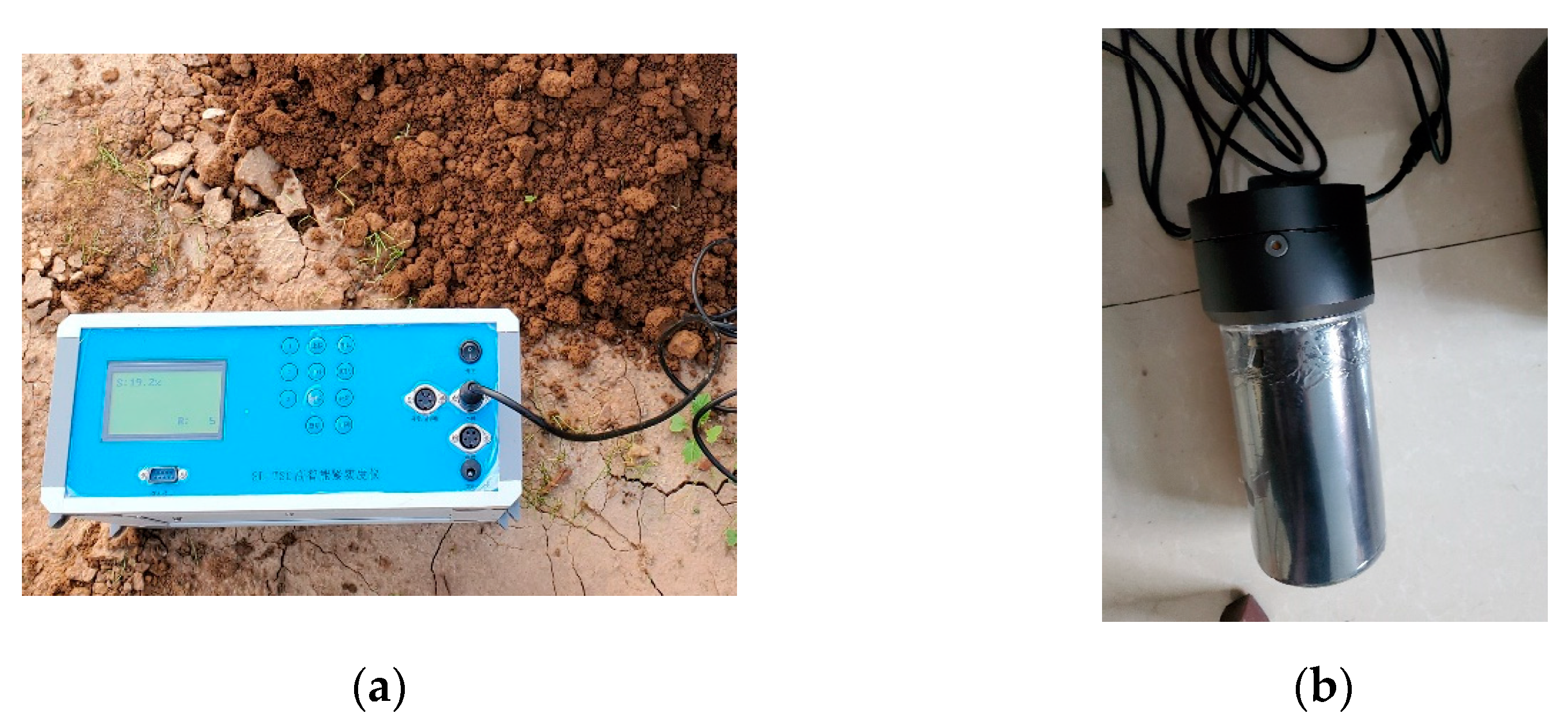
2.6.2. Evaluation Indicators and Test Methods
2.6.3. Test Scheme
3. Results and Discussions
3.1. Test Results
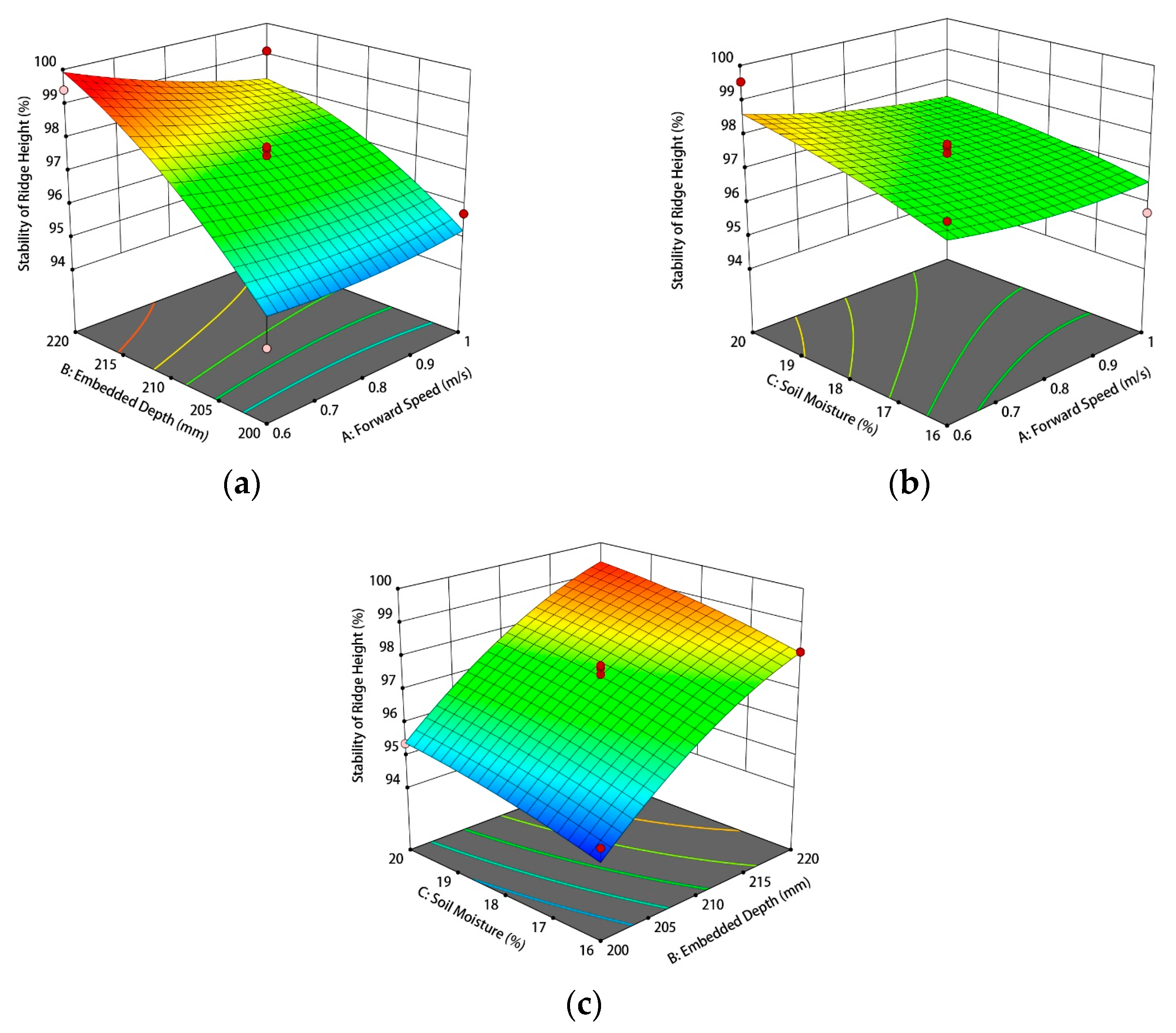
3.2. Analysis of Test Results
Analysis of Stability Coefficient of Ridge Height
3.3. Paramater Pptimization and Comparative Test
4. Discussion
5. Conclusions
- Aiming at the problems of existing ridging and shaping machine such as poor ridging effect, a sweet potato ridging and shaping machine was designed, and its working principle was introduced. The main design parameters of rotary device and pressing and forming device was determined. The force model of ploughshare furrowing and ridging device was established, and the design parameters of each part of ploughshare furrowing and ridging device were determined. EDEM software was used to analyze the soil motion pattern during the operation of ploughshare furrowing and ridging device and carried out field verification test.
- A field test was conducted on a sweet potato ridging and shaping machine using the Box-Behnken response surface methods, and the results showed that the performance was better at embedded depth of 196 mm, a forward speed of 0.82 m/s for the machine, and a soil moisture of 18%.
- Comparative tests show that the performance and fuel consumption of the sweet potato ridging and shaping machine are better than that of 1GQL-2 Sweet potato two rows rotary plowing and ridging machine. It can meet the agronomic requirements of the main sweet potato producing areas in China and provide the basis for the subsequent research of sweet potato combined transplanter and ridging machinery in hilly areas.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, B.; Hu, L.; Xu, L.; Tian, L.; Ji, F.; Wang, B. Status about sweet potato planting and its production machinery in China. J. Chin. Agric. Mech. 2013, 34, 42–46. [Google Scholar]
- Hu, J.; Zhang, W.; Yan, W. Research status and prospect of sweet potato ridging machines at home and abroad. J. Chin. Agric. Mech. 2018, 11, 12–16. [Google Scholar] [CrossRef]
- Li, L.; Xu, Y.; Pan, Z.; Zhang, H.; Sun, T.; Zhai, Y. Design and Experiment of Sweet Potato Up-Film Transplanting Device with a Boat-Bottom Posture. Agriculture 2022, 12, 1716. [Google Scholar] [CrossRef]
- Dai, F.; Zhao, W.; Zhang, F.; Ma, H.; Xin, S.; Ma, M. Research Progress Analysis of Furrow Sowing with Whole Plastic-film Mulching on Double Ridges Technology and Machine in Northwest Rainfed Area. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–16. [Google Scholar] [CrossRef]
- Dai, F.; Zhao, W.; Shi, R.; Zhang, F.; Ma, H.; Ma, M. Design and Experiment of Operation Machine for Filming and Girdle Covering on Double Ridges. Trans. Chin. Soc. Agric. Mach. 2019, 50, 130–139. [Google Scholar] [CrossRef]
- Dai, F.; Zhang, S.; Song, X.; Zhao, W.; Ma, H. Design and Test of Combined Operation Machine for Double Width Filming and Covering Soil on Double Ridges. Trans. Chin. Soc. Agric. Mach. 2020, 51, 108–117. [Google Scholar] [CrossRef]
- Lin, J.; Zhang, T.; Chen, T. Design and test of subsoiling rotary tilling and tilling combined operating machine. Trans. Chin. Soc. Agric. Mach. 2019, 50, 28–39. [Google Scholar] [CrossRef]
- Bao, P.; Wu, M.; Guan, C. Design of plow-rotary style ditching and ridging device for rapeseed seeding. Trans. Chin. Soc. Agric. Mach. 2017, 33, 23–31. [Google Scholar] [CrossRef]
- Wang, F.; Yang, L.; Bao, Y.; Jiang, J. Development of air-suction ridging and seeding machine for carrot. Trans. Chin. Soc. Agric. Mach. 2020, 36, 35–45. [Google Scholar] [CrossRef]
- Fu, Q.; Jian., S.; Jia, H.; Zhao, W.; Lu, A.; Wei, G. Design and experiment on maize stubble cleaning fertilization ridging seeder. Trans. Chin. Soc. Agric. Mach. 2016, 32, 9–16. [Google Scholar] [CrossRef]
- Li, S.; Pan, J.; Zhong, J.; Li, W.; Yang, D.; Mo, Q. Design and Evaluation of a Machine Integrating Ridge-Breaking, Fertilizing, and Ridging for Ratoon Sugarcane Without Intertillage. Sugar Tech 2022, 24, 1913–1923. [Google Scholar] [CrossRef]
- Zhang, Q.; Liao, Y.; Tao, W.; Liao, Q. Design and experiment for ridge lifting device of rapeseed planter. J. Gansu Agric. Univ. 2020, 55, 181–189. [Google Scholar] [CrossRef]
- Liu, X.; Xiao, W.; Ma, L.; Liu, L.; Wan, G.; Liao, Q. Design and Ditching Quality Experiment on Combined Ship Type Opener of Direct Rapeseed Seeder. Trans. Chin. Soc. Agric. Mach. 2017, 48, 79–87. [Google Scholar] [CrossRef]
- Bu, X.; Liao, Q.; Sun, W.; Wei, G.; Zhang, Q.; Wang, P. Design and test of a boot-like acute angle furrow plough for preparing ditch of rapeseed seedbed. J. Huazhong Agric. Univ. 2021, 40, 77–84. [Google Scholar] [CrossRef]
- Ridge Forming Machine with Soil Miller-Aur. Available online: https://weremczukagro.com/en/products/ridge-forming-machine-aur/?from=1144 (accessed on 12 August 2023).
- Reverse Tiller: G35. Available online: https://www.vedafarming.com/farm-implement/reverse-tiller-small (accessed on 12 August 2023).
- Wang, B.; Hu, L.; Wang, S. Design and experiment of sweet potato transplanting operation machine with rotary tillage, ridging, and covering film functions. J. China Agric. Univ. 2018, 23, 116–125. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, L.; Deng, J.; Zheng, T. Development of 1KQ-30 sweet potato ridging machine. Sichuan Agric. Agric. Mach. 2011, 38–39, 41. [Google Scholar] [CrossRef]
- DB37/T 2157-2012; Technical Regulations for Fresh Sweet Potato Production. Shandong Academy of Agricultural Sciences: Shandong, China, 2012.
- DB37/T 3611-2019; Technical Regulations for Sweet Potato Production. Shandong Agricultural University: Shandong, China, 2019.
- GB/T 5669-2017; Rotary Tillage Machinery Blades and Holders. China National GB Standard Research: Nanjing, China, 2017.
- Zhang, C.; Huang, M.; Zhang, S. Design and test of the pressing parts of the vegetable finishing Machine. J. Chin. Agric. Mech. 2023, 44, 49. [Google Scholar] [CrossRef]
- Wei, G.; Zhang, Q.; Liu, L.; Xiao, W.; Sun, W.; Liao, Q. Design and Experiment of Plowing and Rotary Tillage Buckle Device for Rapeseed Direct Seeder. Trans. Chin. Soc. Agric. Mach. 2020, 51, 38–46. [Google Scholar] [CrossRef]
- Chinese Academy of Agricultural Mechanization Sciences. Handbook of Agricultural Machinery Design; Machinery Industry Press: Beijing, China, 2007; pp. 175–220. [Google Scholar]
- Lei, Z. Research on the Impact of High-Speed Plough Structure and Working Parameters on Tillage Resistance; Shihezi University: Shihezi, China, 2020. [Google Scholar] [CrossRef]
- Lu, J.; Liu, Q.; LI, Z. Design and experiment of soil cultivating device of plowshare potato field cultivator. Trans. Chin. Soc. Agric. Mach. 2021, 52, 71–82. [Google Scholar] [CrossRef]
- Lu, J.; Liu, Q.; Yang, D. Design and test of key components of ploughshare potato field cultivator in sandy loam. Trans. Chin. Soc. Agric. Mach. 2021, 52, 27–39. [Google Scholar] [CrossRef]
- Shi, Y.; Chen, X.; Chen, M.; Wang, D.; Shang, S. Design and Experiment on Ploughshare Furrowing Ridging Device of Sweet Potato Ridging Shaping Machine. Trans. Chin. Soc. Agric. Mach. 2022, 53, 16–25. [Google Scholar] [CrossRef]
- JB/T 7864-2013; Middle Tillage Fertilizer Pursuing Machines. China Agricultural Machinery Research Institute: Beijing, China, 2013.
- JB/T 7864-2013; Field Operation Quality of Ditchers. Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs: Nanjing, China, 2003.
- Çıtıl, E.; Taner, A.; Çarman, K. Artificial Neural Network Model for Predicting Specific Draft Force and Fuel Consumption Requirement of a Mouldboard Plough. Selcuk J. Agric. Food Sci. 2019, 33, 241–247. [Google Scholar] [CrossRef]
- Shi, W.; Zhang, B.; Liu, H.; Zhao, Q.; Shi, C.; Wang, X.; Si, C. Response mechanism of sweet potato storage root formation and bulking to soil compactness and its relationship with yield. Acta Agron. Sin. 2019, 45, 755. [Google Scholar] [CrossRef]
- Liu, Y.; Si, C.; Liu, H.; Meng, D.; Shi, C. Effects of Soil Compactness on Population Structure and Yield of Sweet Potato. Shandong Agric. Sci. 2019, 10, 99–103. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Plowshare Ditching and Ridge Device (Steel) | Soil |
|---|---|---|
| Density/(kg∙m−3) | 7800 | 2600 |
| Poisson’s ratio | 0.4 | 0.5 |
| Modulus of shear/Pa | 7.0 × 1010 | 1 × 107 |
| JKR surface energy coefficient (J∙m−2) | - | 9.50 |
| Soil-Steel | Soil-Soil | |
| Coefficient of static friction | 0.3 | 0.8 |
| Coefficient of rolling friction | 0.05 | 0.3 |
| Recovery Factor | 0.3 | 0.6 |
| Parameters | Value | Unit |
|---|---|---|
| Model | LX954 | - |
| Power | ≥70 | kW |
| Traction Force | ≥30 | kN |
| Maximum Torque | 380 | N∙m |
| Rated Fuel Consumption | ≤235 | g/kW∙h |
| Output Rotational speed | 540/720 | r/min |
| Level | Test Factors | ||
|---|---|---|---|
| Forward Speed A (m/s) | Embedded Depth B (mm) | Soil Moisture C (%) | |
| −1 | 0.6 | 190 | 16 |
| 0 | 0.8 | 200 | 18 |
| 1 | 1.0 | 210 | 20 |
| Test | Test Factors | Evaluation Indicators | ||
|---|---|---|---|---|
| Number | A m/s | B mm | C % | Y1 % |
| 1 | 0.6 | 210 | 16 | 97.59 |
| 2 | 1.0 | 220 | 18 | 99.11 |
| 3 | 0.8 | 210 | 18 | 97.19 |
| 4 | 0.8 | 210 | 18 | 97.48 |
| 5 | 0.8 | 200 | 20 | 95.37 |
| 6 | 0.8 | 210 | 18 | 97.75 |
| 7 | 0.6 | 220 | 18 | 99.41 |
| 8 | 0.6 | 210 | 20 | 99.54 |
| 9 | 0.6 | 200 | 18 | 94.16 |
| 10 | 0.8 | 200 | 16 | 94.66 |
| 11 | 0.8 | 210 | 18 | 97.66 |
| 12 | 0.8 | 220 | 20 | 98.98 |
| 13 | 0.8 | 220 | 16 | 98.15 |
| 14 | 1.0 | 210 | 16 | 95.71 |
| 15 | 0.8 | 210 | 18 | 97.03 |
| 16 | 1.0 | 210 | 20 | 97.02 |
| 17 | 1.0 | 200 | 18 | 95.73 |
| Source of Variance | Stability Coefficient of Ridge Height Y1% | |||||
|---|---|---|---|---|---|---|
| Sum of Squares | Freedom | Mean Square | F-Value | p-Value | Significance | |
| Model | 37.25 | 9 | 4.14 | 5.73 | 0.0157 | * |
| A | 1.22 | 1 | 1.22 | 1.70 | 0.2341 | |
| B | 30.93 | 1 | 30.93 | 42.82 | 0.0003 | ** |
| C | 2.88 | 1 | 2.88 | 3.99 | 0.0860 | * |
| AB | 0.8742 | 1 | 0.8742 | 1.21 | 0.3077 | |
| AC | 0.1024 | 1 | 0.1024 | 0.1418 | 0.7177 | |
| BC | 0.0036 | 1 | 0.0036 | 0.0050 | 0.9457 | |
| A² | 0.1330 | 1 | 0.1330 | 0.1842 | 0.6807 | |
| B² | 1.04 | 1 | 1.04 | 1.44 | 0.2690 | |
| C² | 0.0765 | 1 | 0.0765 | 0.1058 | 0.7544 | |
| Residual | 5.06 | 7 | 0.7223 | |||
| Lack of Fit | 4.68 | 3 | 1.56 | 16.64 | 0.0101 | |
| Pure Error | 0.3751 | 4 | 0.0938 | |||
| Total | 42.31 | 16 | ||||
| Type | Test Factors | ||
|---|---|---|---|
| Stability Coefficient of Ridge Height | Average Soil Compactness/kPa | Average Fuel Consumption | |
| sweet potato ridging and shaping machine | 97.53 | 278 | 11,947 |
| 1GQL-2 sweet potato two rows rotary plowing and ridging machine | 95.42 | 216 | 12,474 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Chen, M.; Liu, M.; Li, Y.; Yang, D.; Wu, H. Design and Experiment of Sweet Potato Ridging and Forming Machine. Agriculture 2023, 13, 1641. https://doi.org/10.3390/agriculture13081641
Chen X, Chen M, Liu M, Li Y, Yang D, Wu H. Design and Experiment of Sweet Potato Ridging and Forming Machine. Agriculture. 2023; 13(8):1641. https://doi.org/10.3390/agriculture13081641
Chicago/Turabian StyleChen, Xinyu, Mingdong Chen, Mengmeng Liu, Yang Li, Deqiu Yang, and Haihua Wu. 2023. "Design and Experiment of Sweet Potato Ridging and Forming Machine" Agriculture 13, no. 8: 1641. https://doi.org/10.3390/agriculture13081641