
Development and Experimental Validation of an Agricultural Robotic Platform with High Traction and Low Compaction
 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
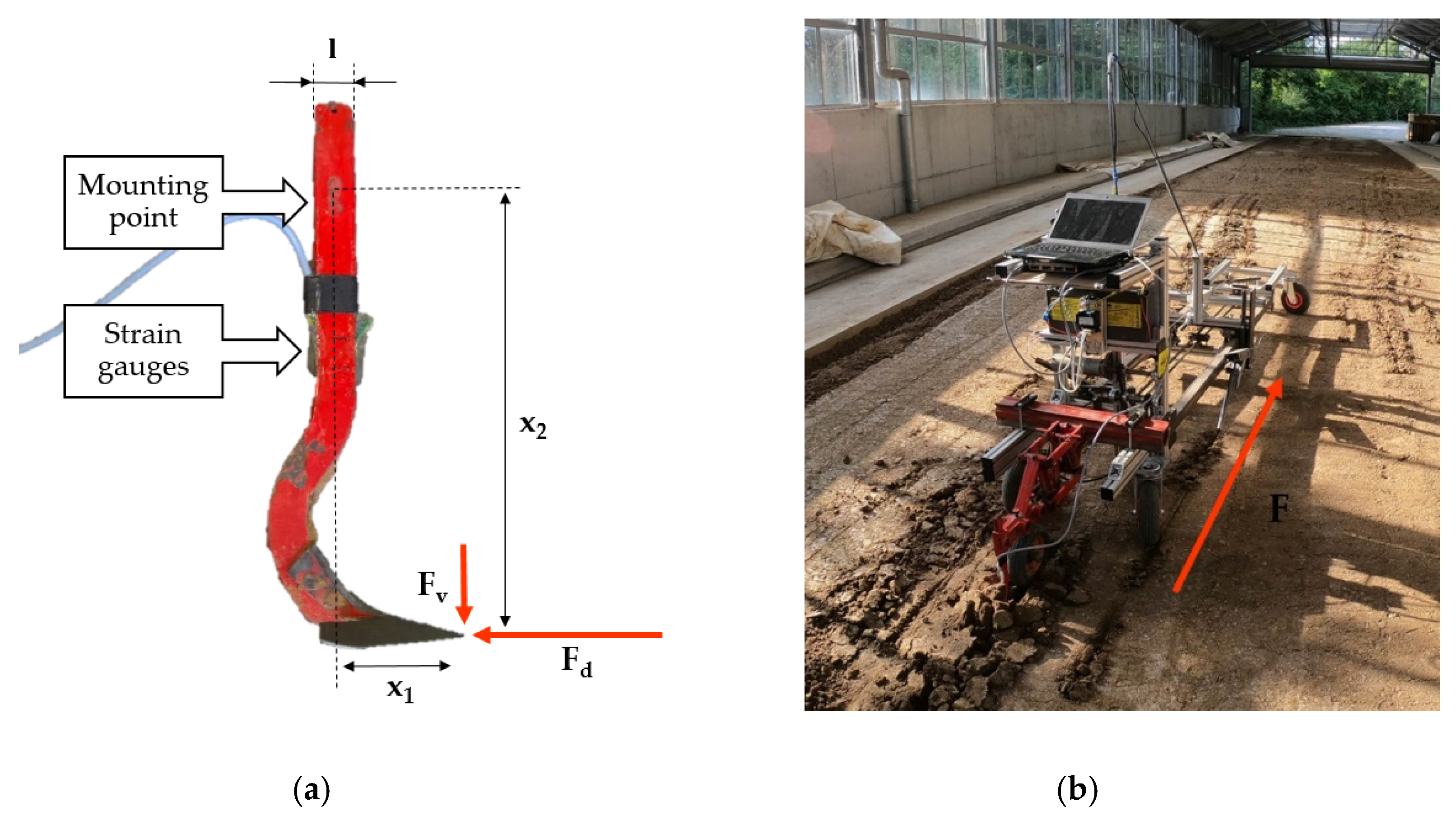
2.1. Soil Interaction Force
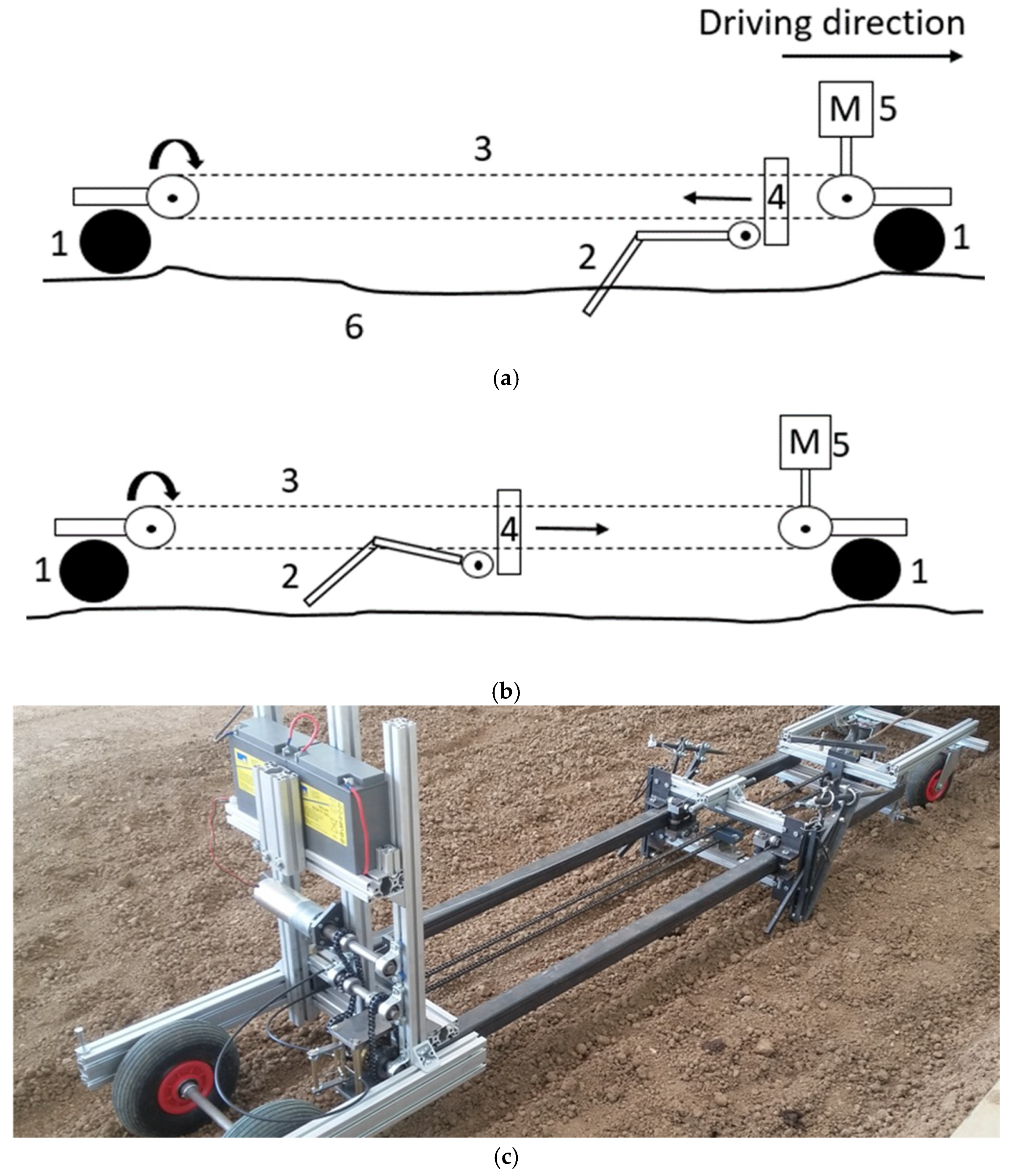
2.2. Movement of the Prototype
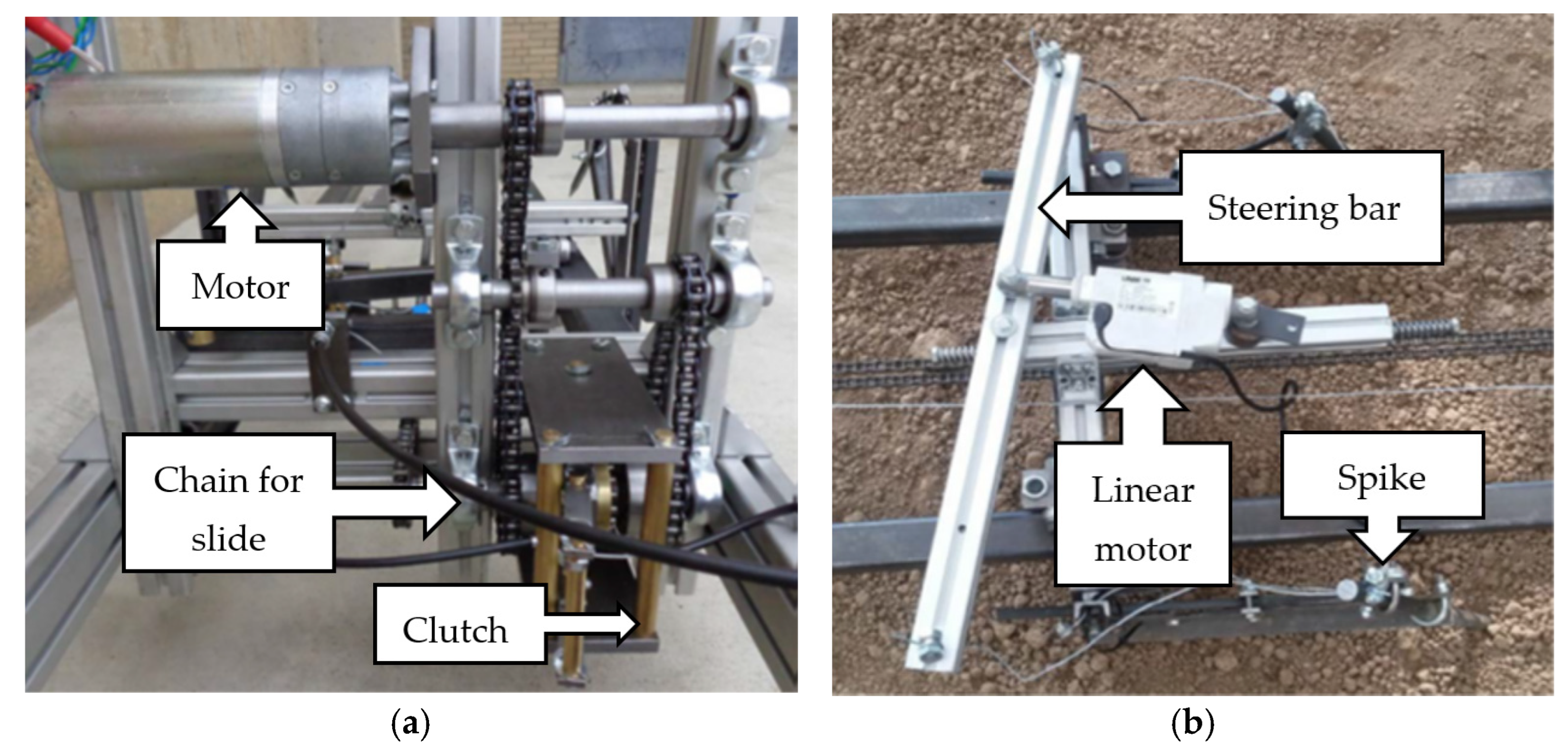
2.3. Mechanics and Control
2.4. Experimental Setup
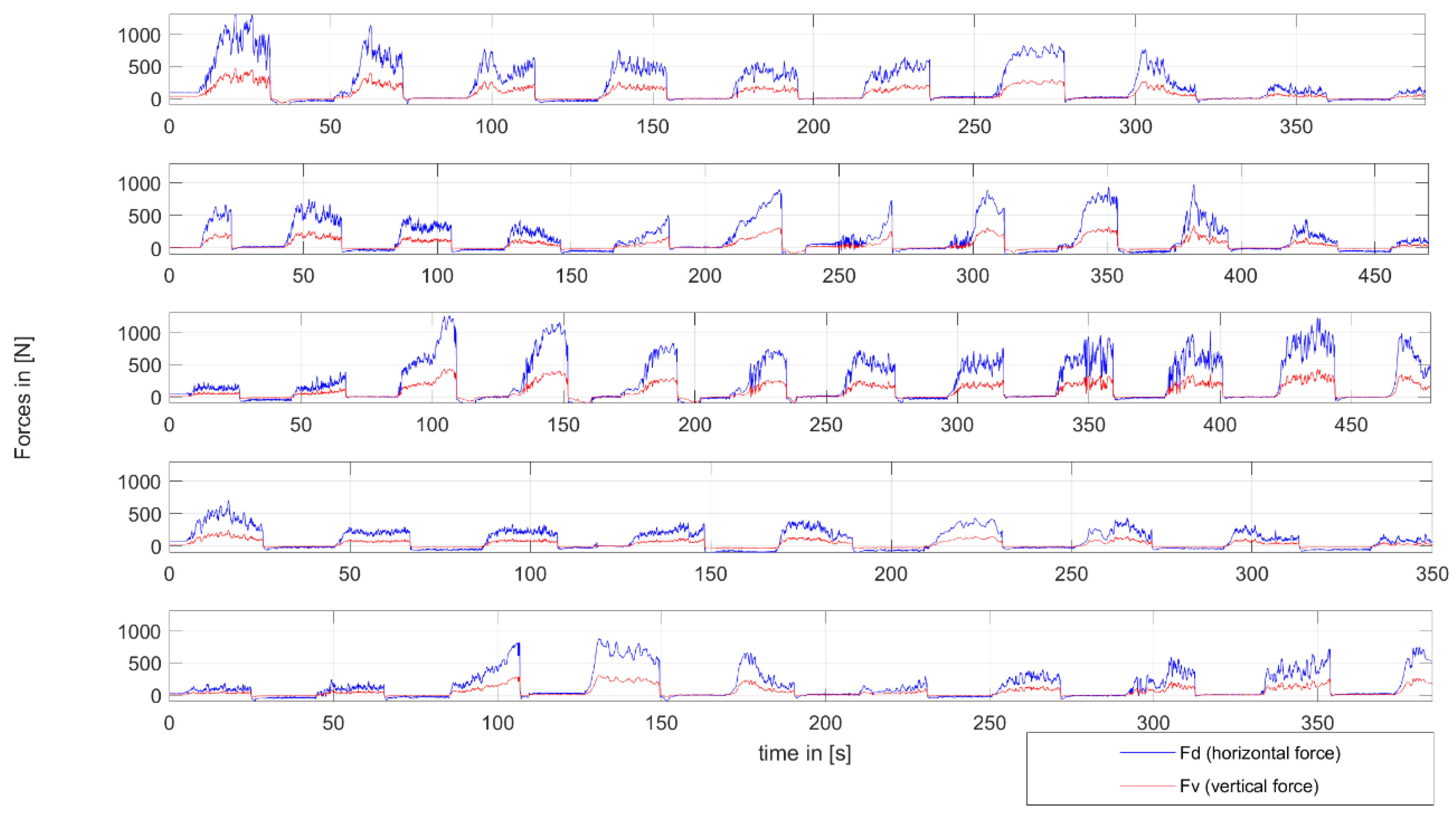
2.5. Determination of Draft Forces
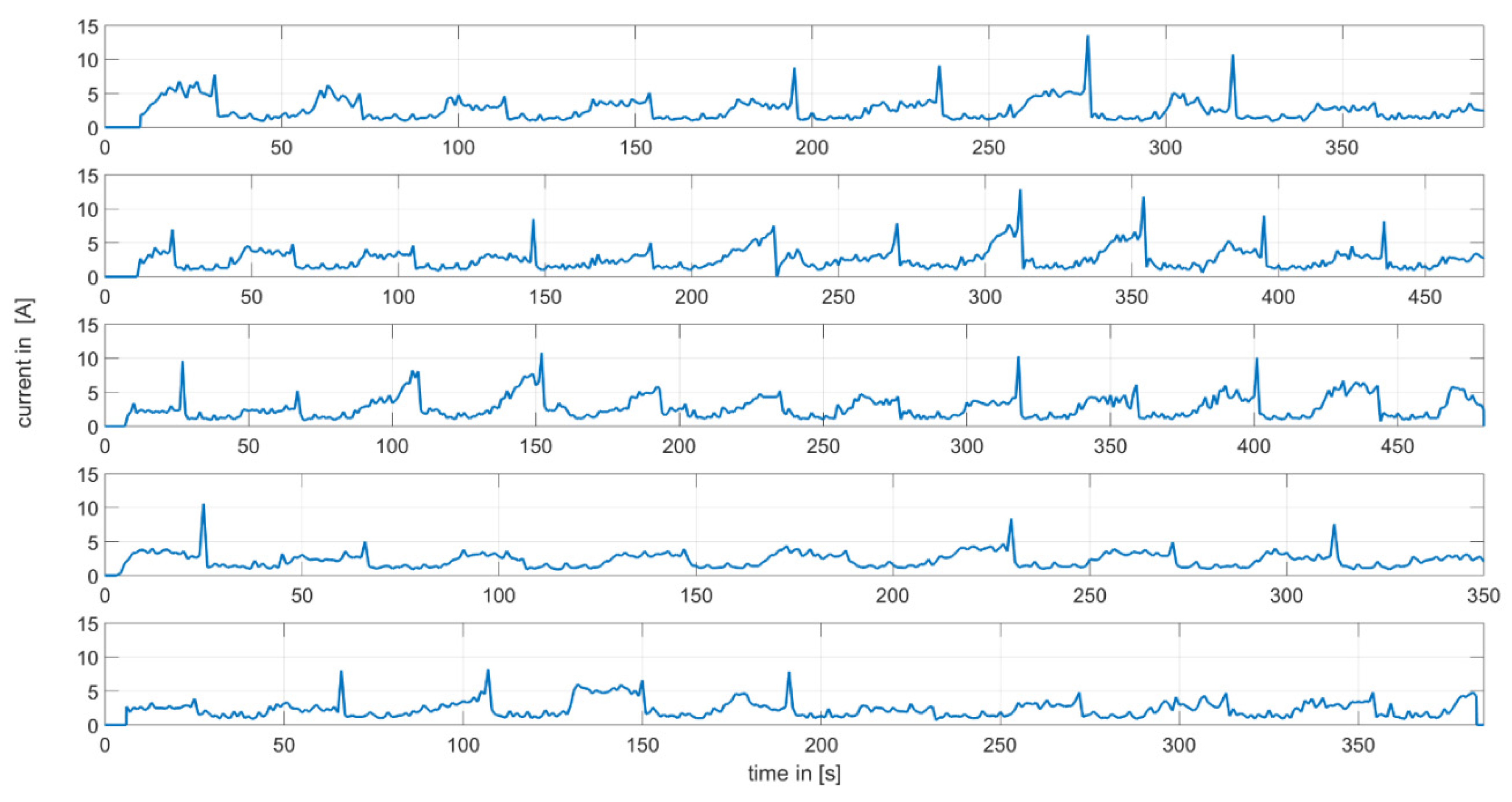
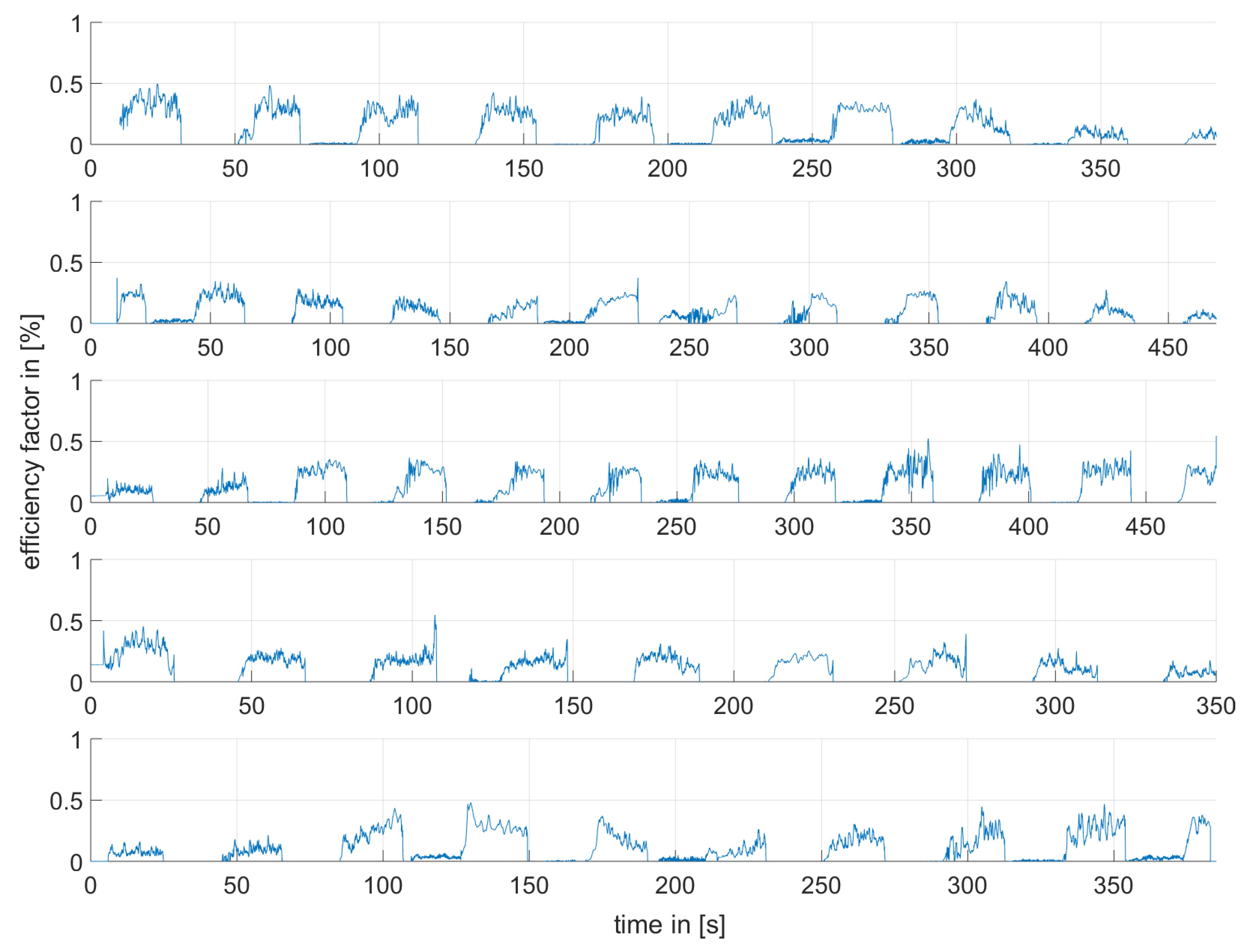
2.6. Overall Energy Efficiency Ratio
2.7. Soil Conditions at the Experimental Site
3. Results and Discussion
3.1. Static Stress Experiment
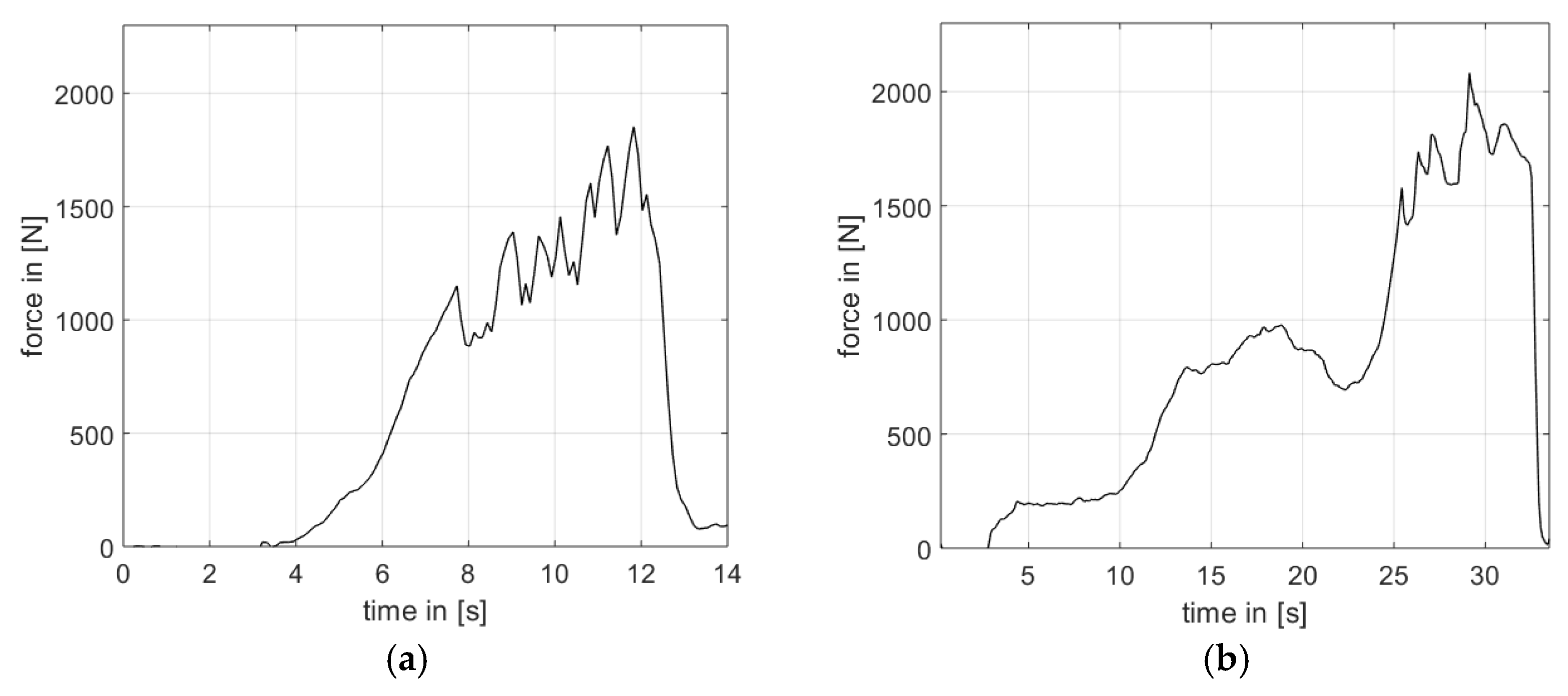
3.2. Dynamic Performance Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
References
- BMU Klimaschutzplan 2050—Klimaschutzpolitische Grundsätze und Ziele der Bundesregierung. 2016, Volume 4, p. 11. Available online: www.bmwk.de (accessed on 17 July 2023).
- Fountas, S.; Gemtos, T.A.; Blackmore, S. Robotics and Sustainability in Soil Engineering BT—Soil Engineering; Dedousis, A.P., Bartzanas, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 69–80. ISBN 978-3-642-03681-1. [Google Scholar]
- Paraforos, D.S.; Aubé, C.; Athanasakos, L.; Avgoustakis, I.; Baron, S.; Bresilla, T.; Fountas, S.; Hemming, J.; Karagiannis, P.; Mylonas, N.; et al. Connecting Agricultural Robots and Smart Implements by Using ISO 11783 Communication. In Proceedings of the 7th IFAC Conference on Sensing, Control and Automation Technologies for Agriculture, Munich, Germany, 14–16 September 2022; Volume 62, pp. 123–133. [Google Scholar]
- Blackmore, B.S.; Griepentrog, H.W.; Fountas, S. Autonomous Systems for European Agriculture. In Proceedings of the Automation Technology for Off-Road Equipment, Bonn, Germany, 1–2 September 2006. [Google Scholar]
- Johnson, D.A.; Carolina, N.; Naffin, D.J.; Puhalla, J.S.; Dakota, N.; Wellington, C.K. Development and Implementation of a Team of Robotic Tractors for Autonomous Peat Moss Harvesting. J. Field Robot. 2009, 26, 549–571. [Google Scholar] [CrossRef] [Green Version]
- Vougioukas, S.G. A Distributed Control Framework for Motion Coordination of Teams of Autonomous Agricultural Vehicles. Biosyst. Eng. 2012, 113, 284–297. [Google Scholar] [CrossRef]
- Floreano, D.; Wood, R.J. Science, Technology and the Future of Small Autonomous Drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reiser, D.; Sehsah, E.; Bumann, O.; Morhard, J.; Griepentrog, H.W. Development of an Autonomous Electric Robot Implement for Intra-Row Weeding in Vineyards. Agriculture 2019, 9, 18. [Google Scholar] [CrossRef] [Green Version]
- Ruckelshausen, A.; Biber, P.; Dorna, M.; Gremmes, H.; Klose, R.; Linz, A.; Rahe, F.; Resch, R.; Thiel, M.; Trautz, D.; et al. BoniRob: An Autonomous Field Robot Platform for Individual Plant Phenotyping. In Proceedings of the Joint International Agricultural Conference, Wageningen, The Netherlands, 6–8 July 2009; Volume 9, pp. 841–847. [Google Scholar]
- Martínez-Guanter, J.; Garrido-Izard, M.; Valero, C.; Slaughter, D.C.; Pérez-Ruiz, M. Optical Sensing to Determine Tomato Plant Spacing for Precise Agrochemical Application: Two Scenarios. Sensors 2017, 17, 1096. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aneke, M.; Wang, M. Energy Storage Technologies and Real Life Applications—A State of the Art Review. Appl. Energy 2016, 179, 350–377. [Google Scholar] [CrossRef] [Green Version]
- Hamza, M.A.; Anderson, W.K. Soil Compaction in Cropping Systems: A Review of the Nature, Causes and Possible Solutions. Soil Tillage Res. 2005, 82, 121–145. [Google Scholar] [CrossRef]
- Schreiber, M.; Kutzbach, H.D. Influence of Soil and Tire Parameters on Traction. Res. Agric. Eng. 2008, 54, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Kliefoth, F. Zugkraft, Fahrgeschwindigkeit und Gewicht der Schlepper. Landtech. Forsch. 1953, 3, 117–124. [Google Scholar]
- Bentzien, U. Landmaschinentechnik in Mecklenburg (1800 Bis 1959). In Jahrbuch für Wirtschaftsgeschichte; Akademie Verlag: Berlin, Germany, 1965; Volume 6, pp. 54–81. [Google Scholar]
- Abrahám, R.; Majdan, R.; Drlička, R. Possibilities of Improving the Wheel Tractor Drive Force Transmission to Soil. Res. Agric. Eng. 2015, 61, S37–S42. [Google Scholar] [CrossRef] [Green Version]
- Federle, W. An Integrative Study of Insect Adhesion: Mechanics and Wet Adhesion of Pretarsal Pads in Ants. Integr. Comp. Biol. 2002, 42, 1100–1106. [Google Scholar] [CrossRef] [PubMed]
- Romão, J.C.; Tavakoli, M.; Viegas, C.; Neto, P.; De Almeida, A.T. InchwormClimber: A Light-Weight Biped Climbing Robot with a Switchable Magnet Adhesion Unit. In Proceedings of the IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 3320–3325. [Google Scholar]
- Patronik, N.A.; Ota, T.; Zenati, M.A.; Riviere, C.N. Synchronization of Epicardial Crawling Robot with Heartbeat and Respiration for Improved Safety and Efficiency of Locomotion. Int. J. Med. Robot. Comput. Assist. Surg. 2012, 8, 97–102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Spenko, M.J.; Haynes, G.C.; Saunders, J.A.; Cutkosky, M.R.; Rizzi, A.A. Biologically Inspired Climbing with a Hexapedal Robot. J. Field Robot. 2008, 25, 223–242. [Google Scholar] [CrossRef] [Green Version]
- Christensen, D.L.; Hawkes, E.W.; Suresh, S.A.; Ladenheim, K.; Cutkosky, M.R. Μtugs: Enabling Microrobots to Deliver Macro Forces with Controllable Adhesives. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 4048–4055. [Google Scholar]
- Bover, D. Autonomous Self-Actuated Ploughing Implement. U.S. Patent No. 9,144,188 B2, 29 September 2015. [Google Scholar]
- Nannen, V.; Bover, D.; Reiser, D.; Zöbel, D. Motion Study of Spike Entering the Soil of the Interlock Drive System. In Proceedings of the 21st ISTRO International Conference, Paris, France, 24–27 September 2018; pp. 405–406. [Google Scholar]
- Spektor, M.; Katz, M. Experimental Study of Frontal Resistance Force in Soil Cutting. J. Terramech. 1985, 22, 127–133. [Google Scholar] [CrossRef]
- Nannen, V.; Bover, D.; Zöbel, D. A Novel Traction Mechanism Based on Retractable Crampons to Minimize Soil Compaction and Reduce Energy Consumption. engrxiv 2017. preprint. [Google Scholar] [CrossRef]
- Reiser, D.; Nannen, V.; Hubel, G.; Griepentrog, H.W. Design, Modelling and Control of a Novel Agricultural Robot with Interlock Drive System. In Proceedings of the IEEE/RJS International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 5520–5525. [Google Scholar]
- Magenau, T. Entwicklung Eines Mobilen Prüfstands zur Untersuchung der Rad-Boden-Schnittstelle Bei Hangfahrten; University of Hohenheim: Stuttgart, Germany, 2008. [Google Scholar]
- ASAE D497.5 FEB2006; ASABE Agricultural Machinery Management Data; American Society of Agricultural and Biological Engineers: Saint Joseph, MI, USA, 2006.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Specifications of the Robot | |
|---|---|
| Power of DC motor (W) | 120 |
| Number of spikes | 2 |
| Fixed width of the robot (m) | 0.55 |
| Operation row width (m) | 0.75 |
| Pull force of the LA23 linear motor (N) | 1500 |
| Type of the used motor controller | SDC2130 |
| Nominal voltage supply (V) | 24 |
| Supplied current (Ah) | 17 |
| Name | Value | Unit |
|---|---|---|
| E | 2,100,000 | (N/m²) |
| l | 0.028 | (m) |
| h | 0.01 | (m) |
| X1 | 0.065 | (m) |
| X2 | 0.188 | (m) |
| Fd (N) | Fv (N) | Ein (W) | Eout (N*m/s) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Row No. | Me (s) | σ | Max | σ | Ax | σ | Ax | σ | Max | |||||
| 1 | 389 | 436.8 | 264.2 | 1335.3 | 149.7 | 91.8 | 461.7 | 62.2 | 36.1 | 316.8 | 10.6 | 14.2 | 65.3 | 0.17 |
| 2 | 468 | 333.9 | 226.4 | 973.9 | 113.0 | 78.8 | 336.7 | 59.4 | 37.1 | 299.3 | 5.7 | 10.0 | 40.6 | 0.10 |
| 3 | 478 | 502.5 | 293.4 | 1260.3 | 172.7 | 101.9 | 435.8 | 65.1 | 37.7 | 250.6 | 9.9 | 13.8 | 52.1 | 0.15 |
| 4 | 349 | 228.4 | 108.2 | 706.8 | 78.3 | 37.8 | 244.4 | 55.1 | 25.2 | 245.9 | 5.5 | 8.7 | 39.3 | 0.16 |
| 5 | 383 | 295.5 | 214.3 | 872.9 | 100.6 | 74.3 | 301.3 | 54.2 | 29.0 | 191.9 | 6.9 | 10.7 | 44.7 | 0.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reiser, D.; Sharipov, G.M.; Hubel, G.; Nannen, V.; Griepentrog, H.W. Development and Experimental Validation of an Agricultural Robotic Platform with High Traction and Low Compaction. Agriculture 2023, 13, 1510. https://doi.org/10.3390/agriculture13081510
Reiser D, Sharipov GM, Hubel G, Nannen V, Griepentrog HW. Development and Experimental Validation of an Agricultural Robotic Platform with High Traction and Low Compaction. Agriculture. 2023; 13(8):1510. https://doi.org/10.3390/agriculture13081510
Chicago/Turabian StyleReiser, David, Galibjon M. Sharipov, Gero Hubel, Volker Nannen, and Hans W. Griepentrog. 2023. "Development and Experimental Validation of an Agricultural Robotic Platform with High Traction and Low Compaction" Agriculture 13, no. 8: 1510. https://doi.org/10.3390/agriculture13081510