

Development Results of a Cross-Platform Positioning System for a Robotics Feed System at a Dairy Cattle Complex
 ,
,  ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
3. Results
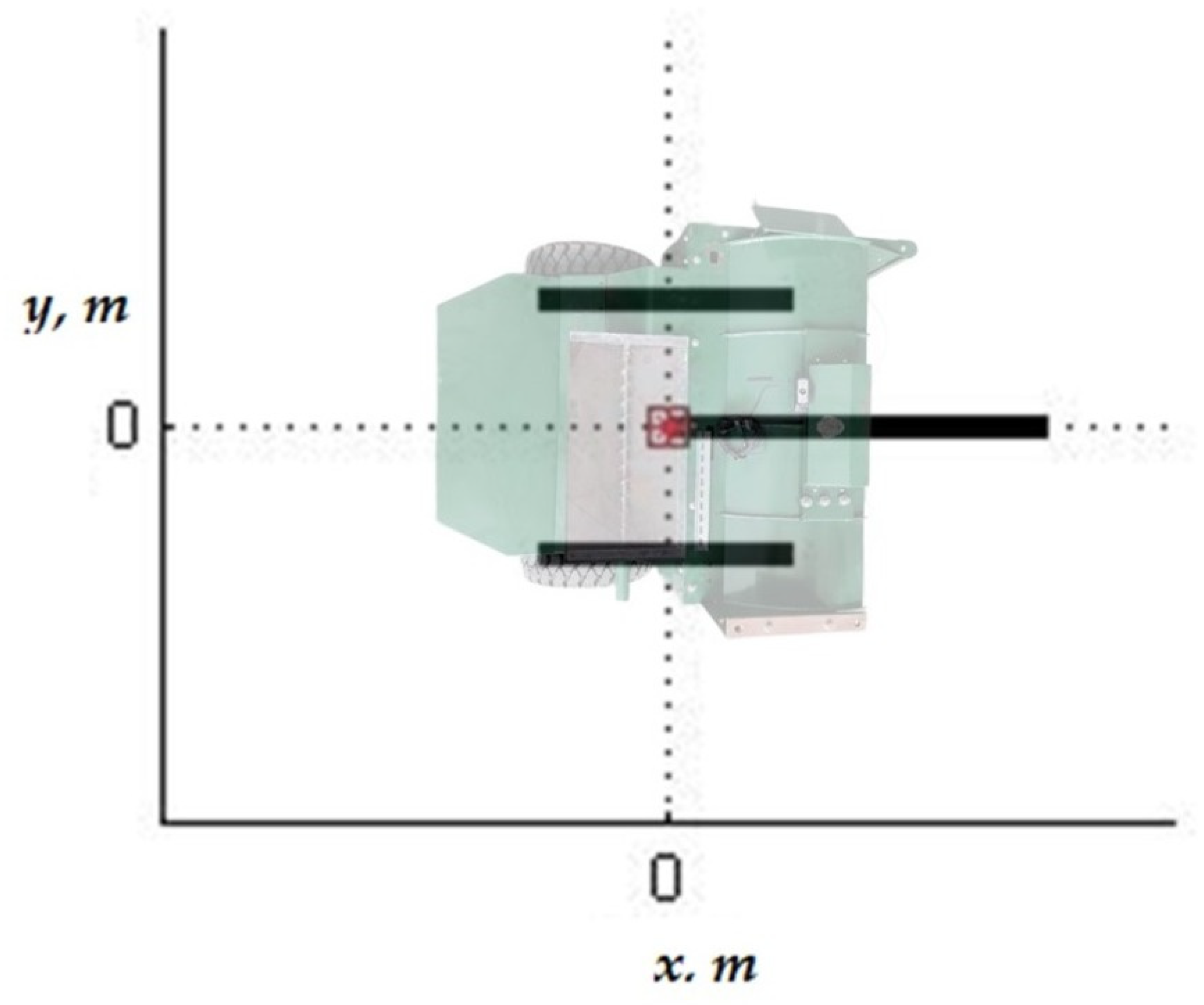
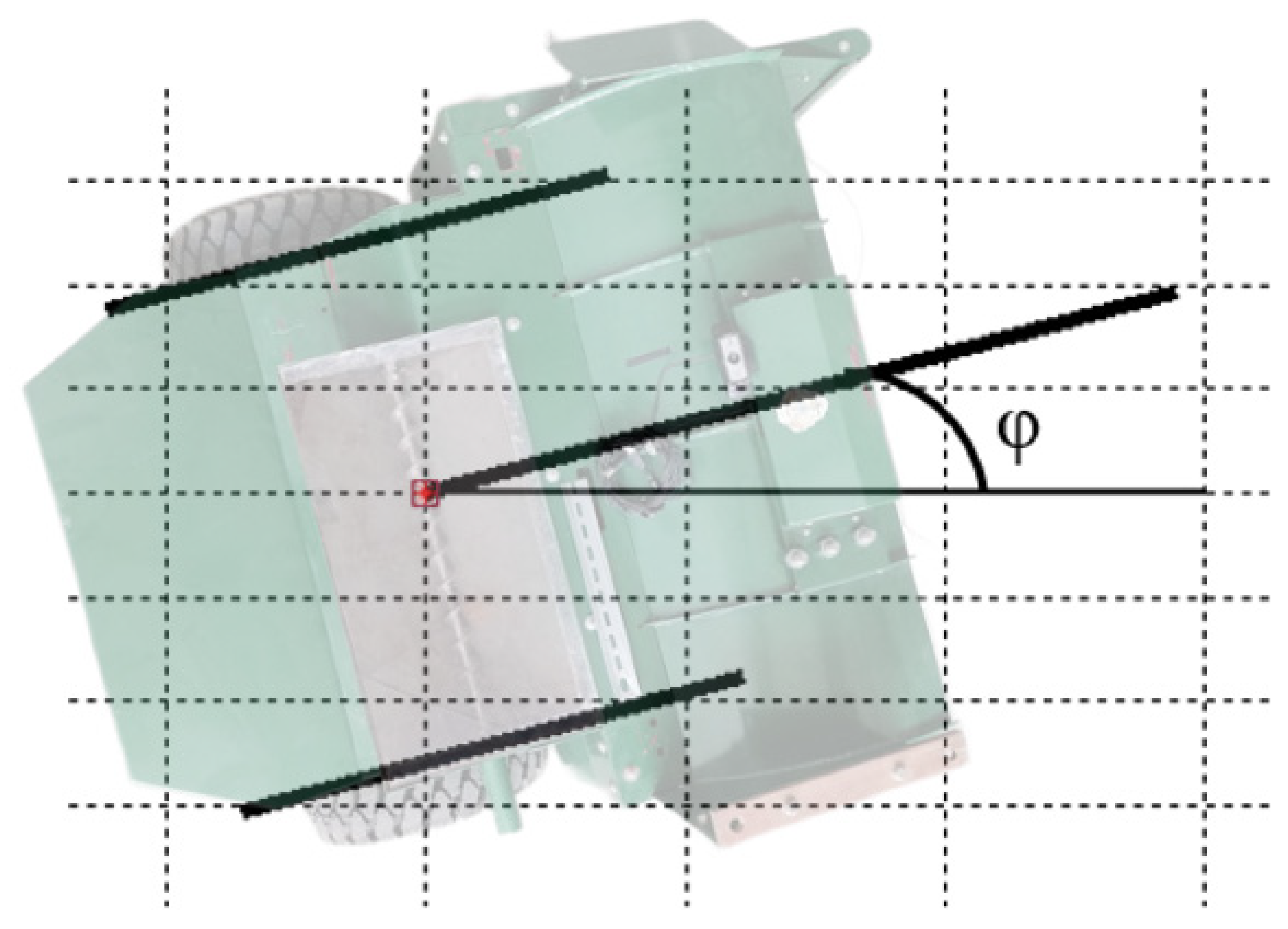
3.1. Kinematic Calculation of Robot Movement
3.2. Inverse Kinematics Problem
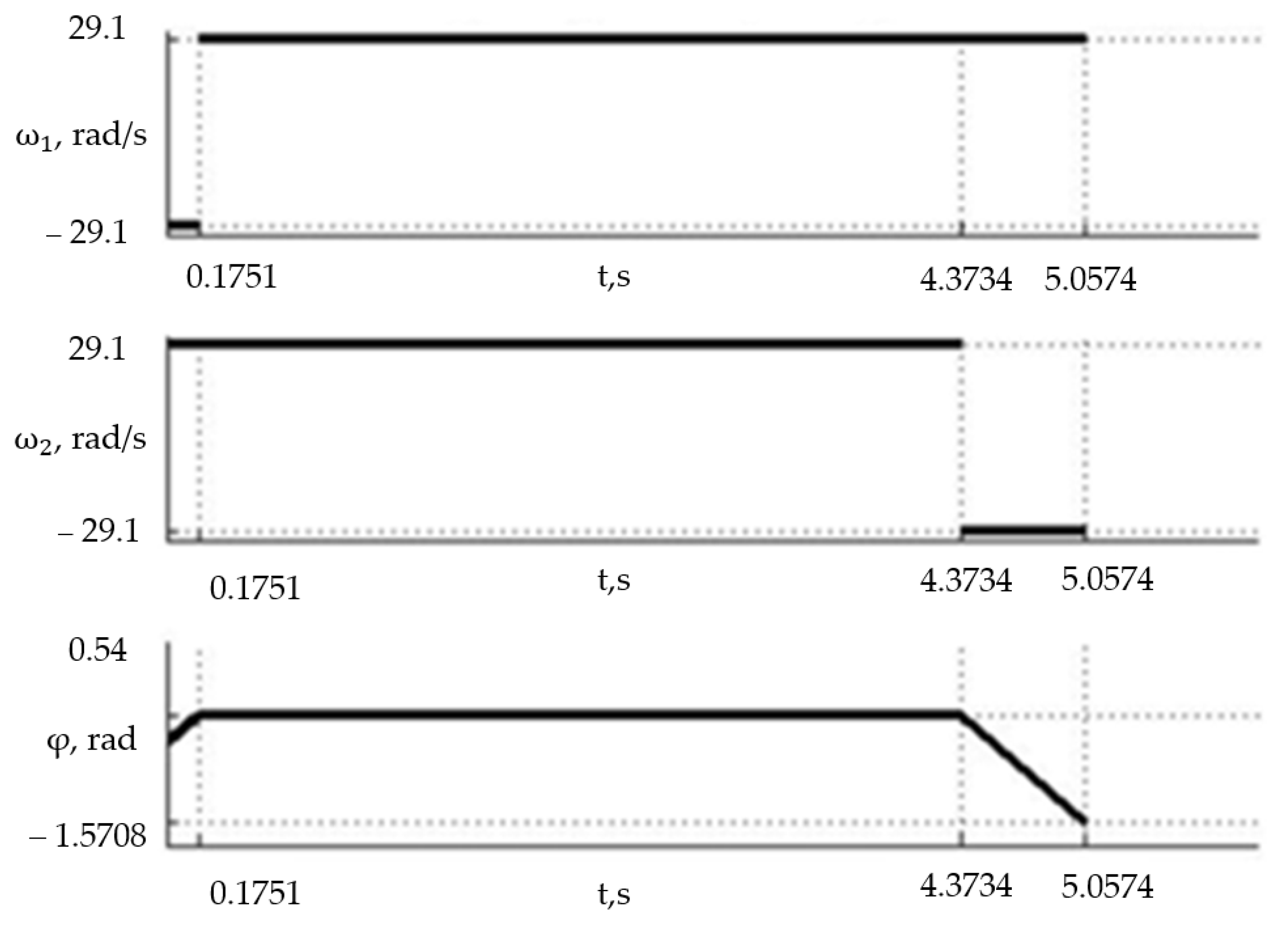
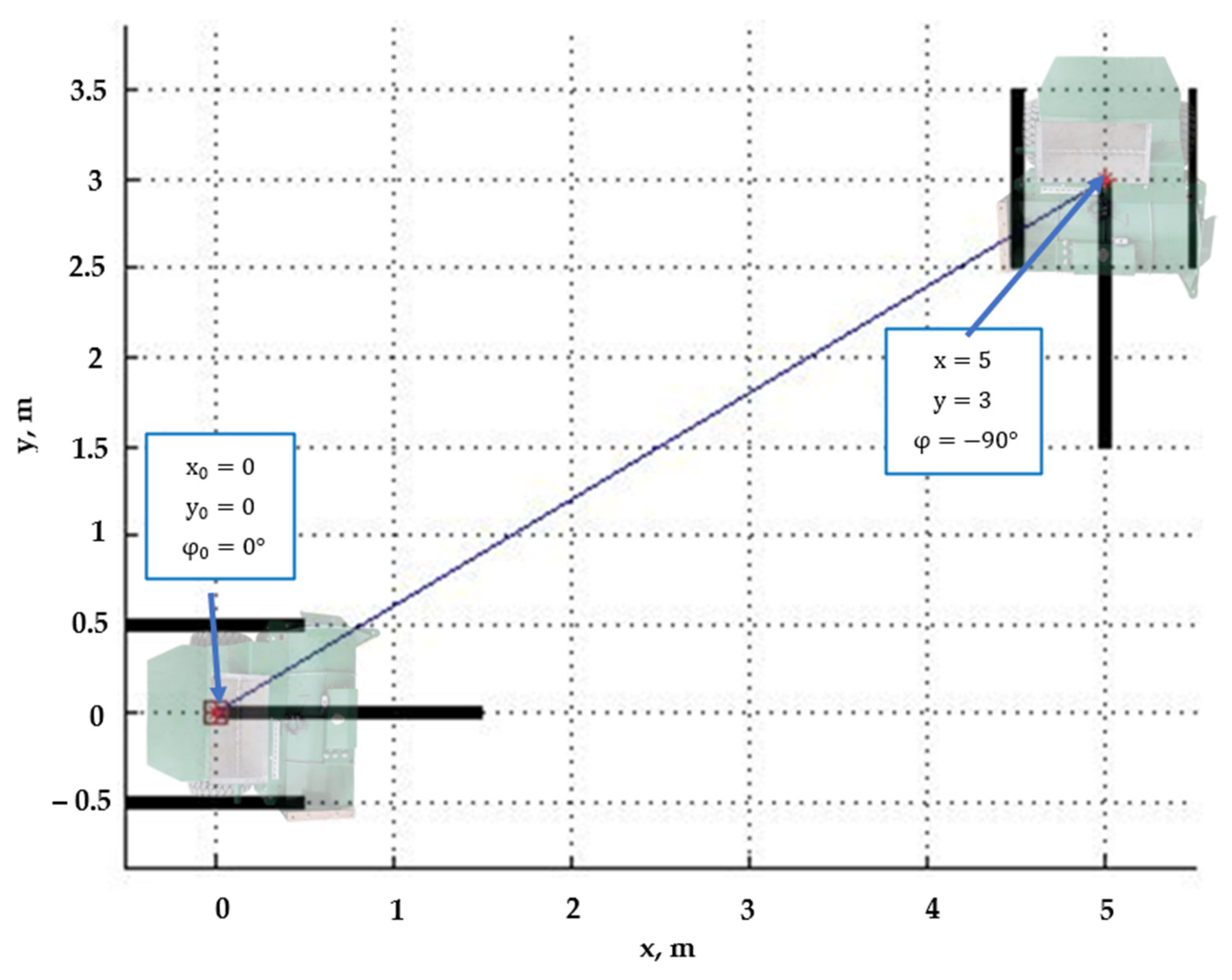
- Turn from the initial position;
- Uniform rectilinear motion;
- Turn to the specified angle.
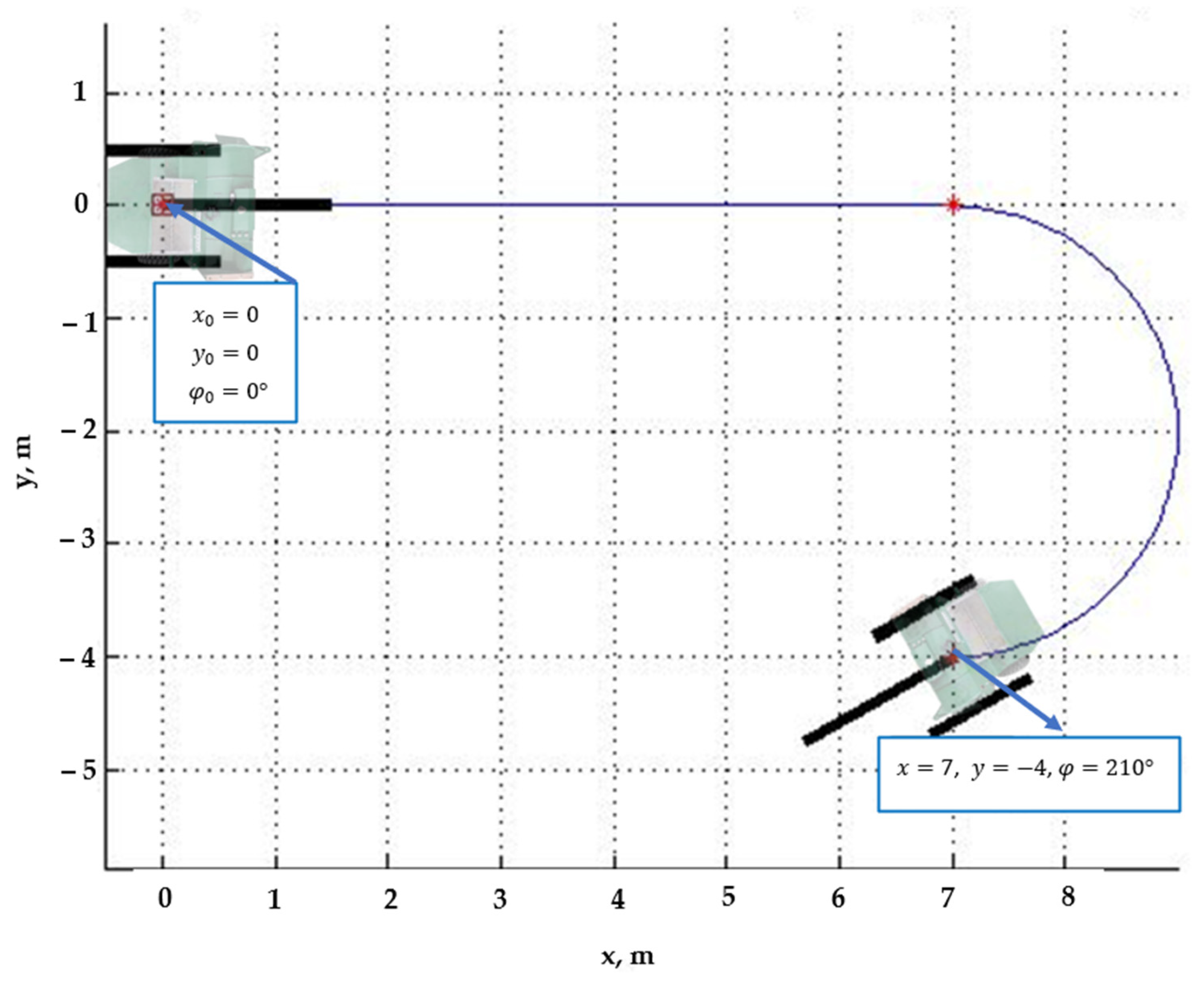
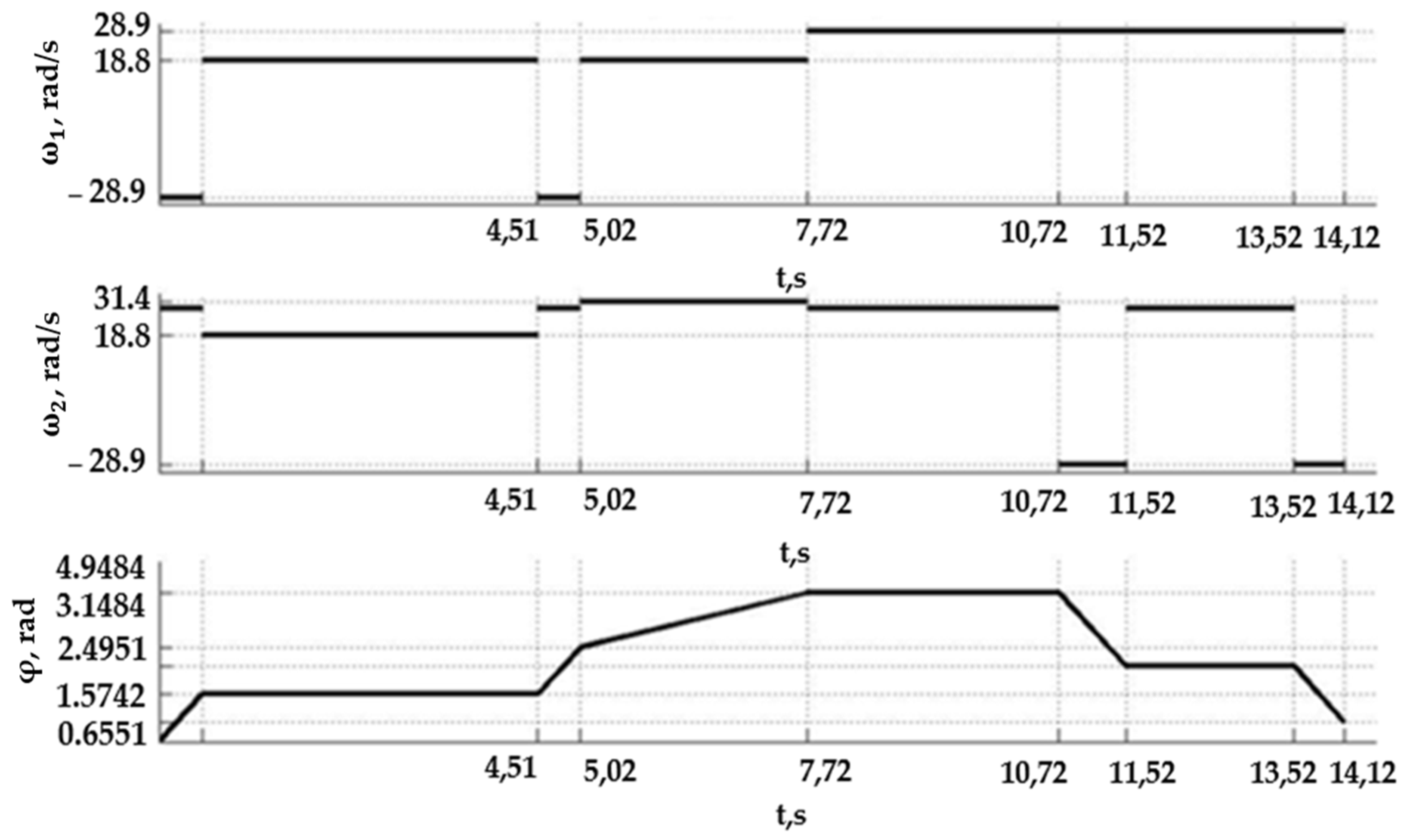
- Turning from the initial position (if );
- Uniform rectilinear motion;
- Circular motion;
- Turning to the given angle.
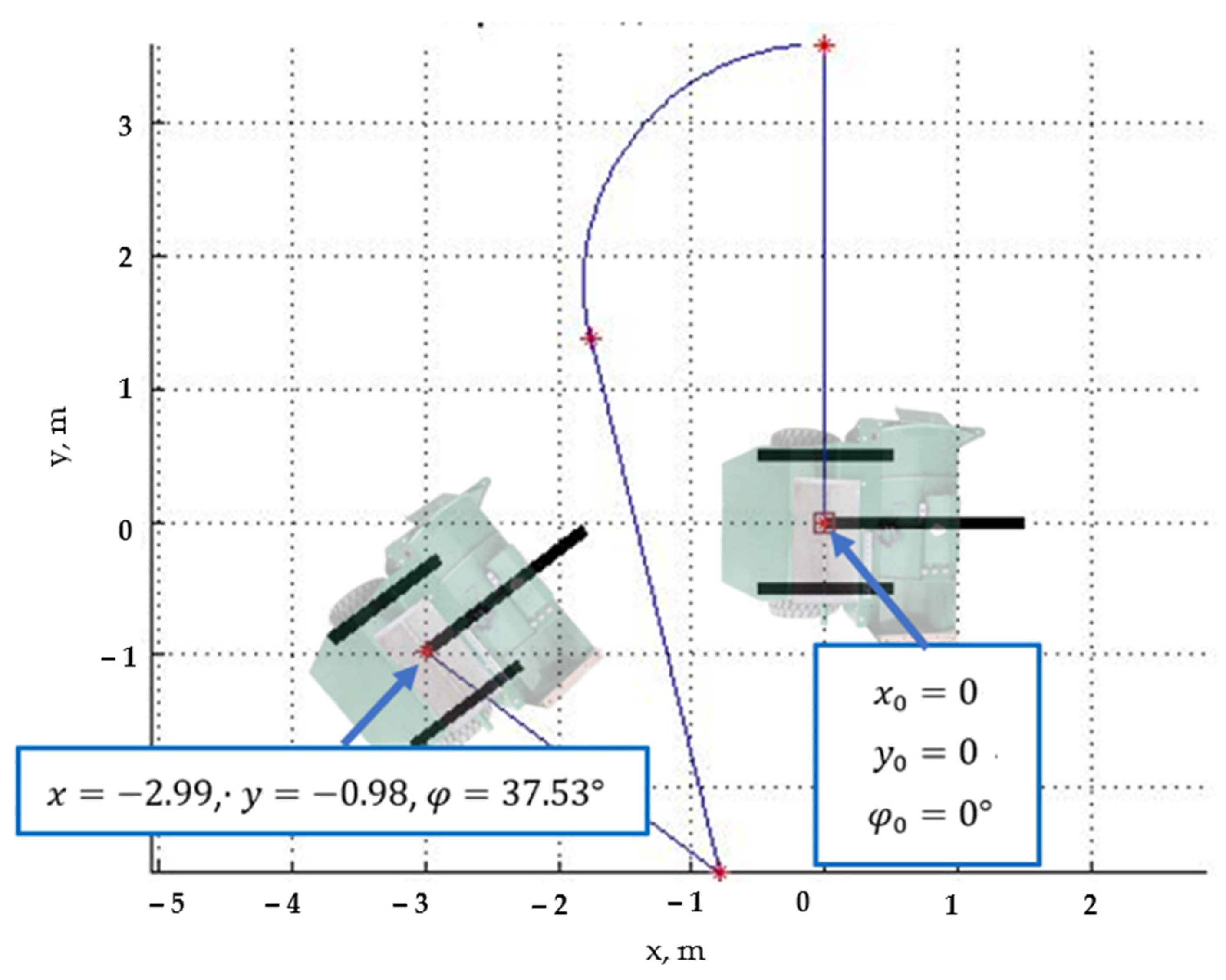
3.3. The Forward Kinematics Problem
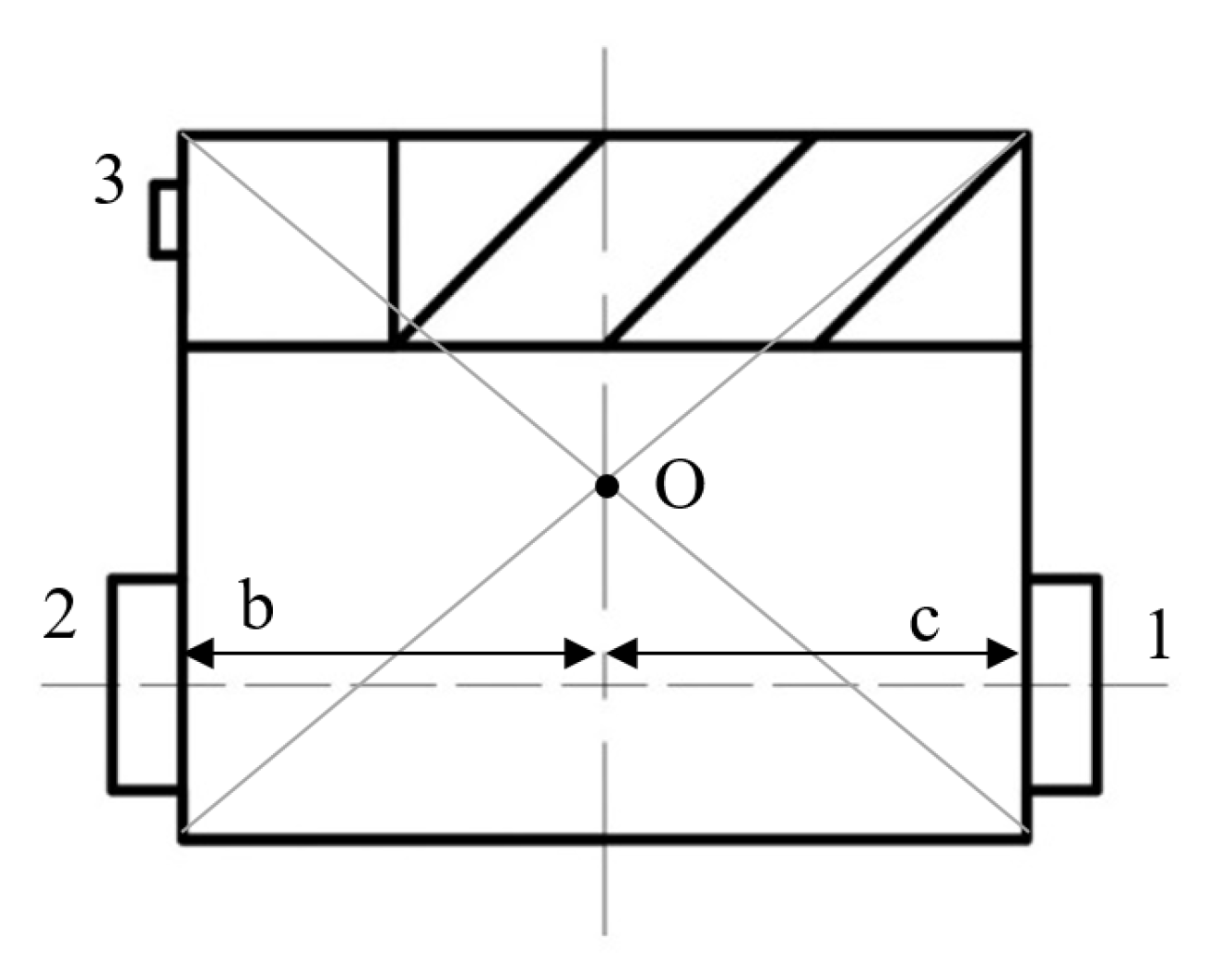
3.4. Dynamic Characteristics of Robot Motion
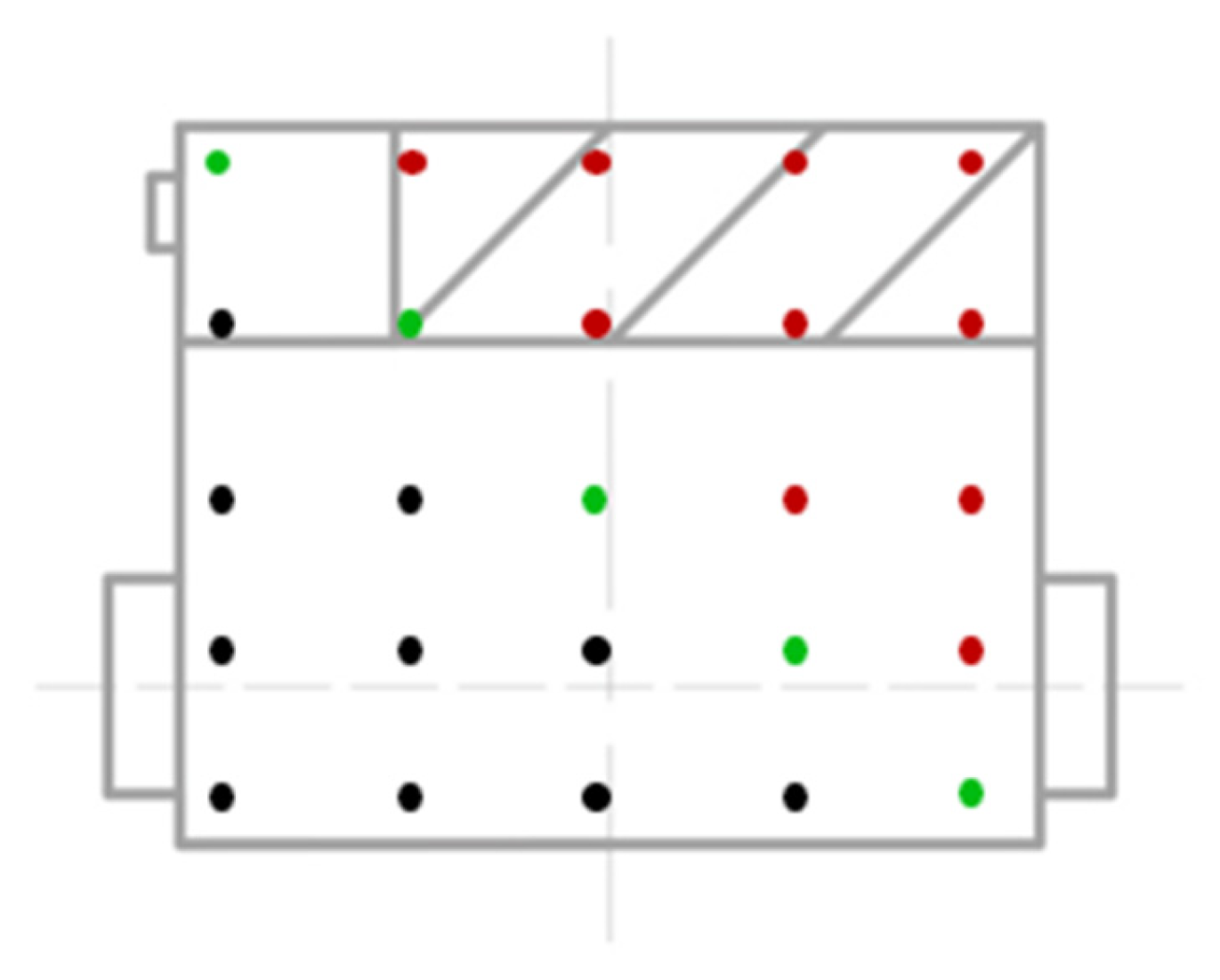
- When the CM falls on the main diagonal (highlighted in gray in Table 3), the robot is in a state of equilibrium, relying only on the right driving and front auxiliary wheels; there is no load on the left driving wheel;
- When the CM falls in the area above the main diagonal (highlighted in red in Figure 11) of the matrix, the robot may tip over turning a corner.
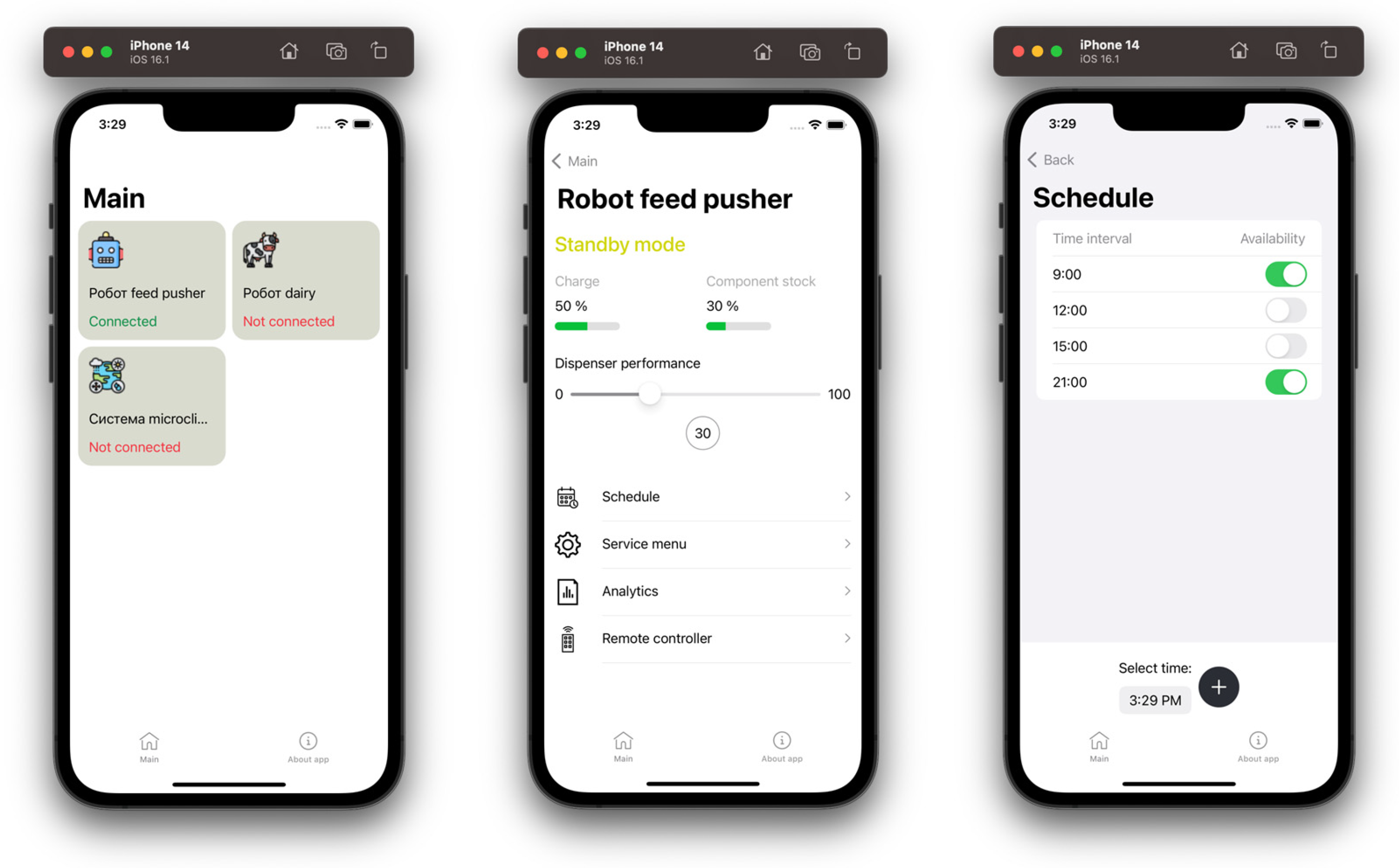
3.5. Testing Mobile Application and Robot on Farm
- Change of undercarriage operating modes during the elaboration of turning was carried out automatically without human intervention;
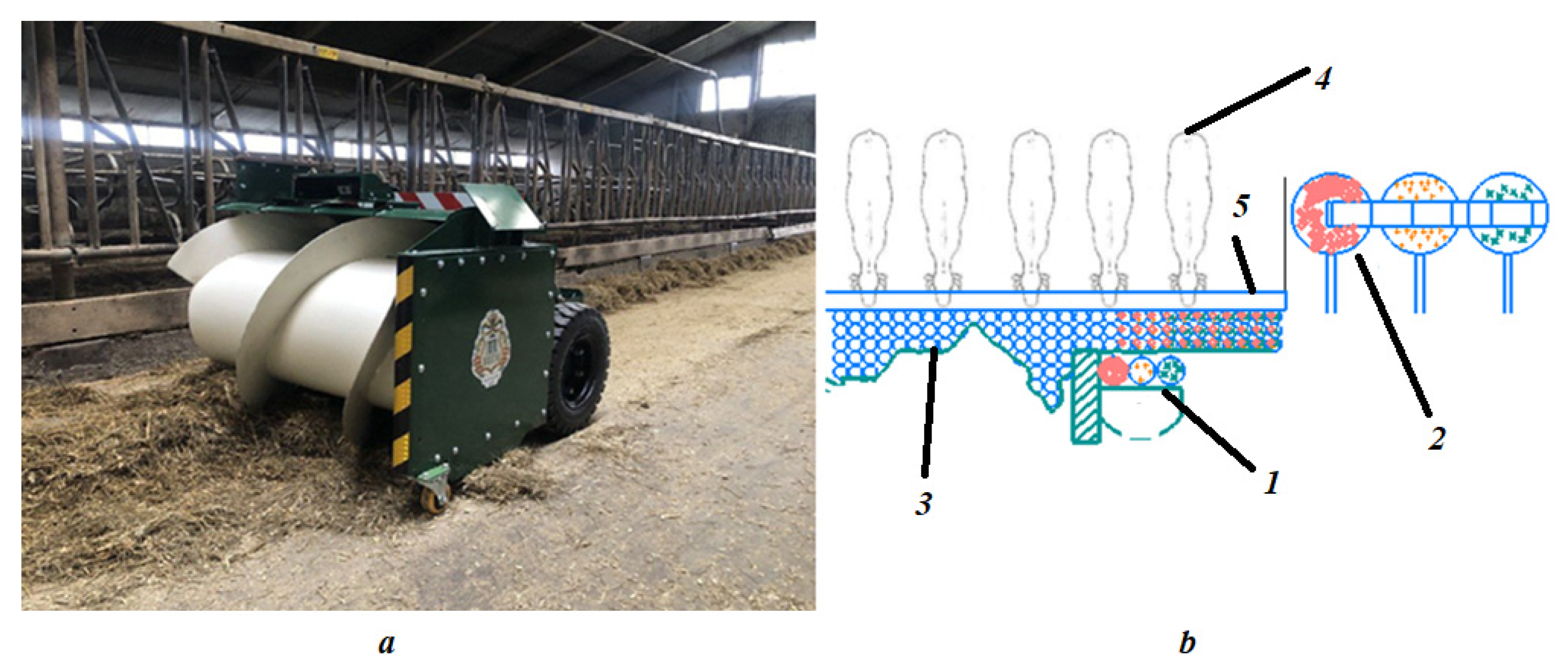
- Movements of the robot along the feed alley and autonomous performance of operations (pushing feed to the fence of the feed alley, dosing feed additives, taking into account the remaining amount of key feed rations);
- Remote monitoring of the robot conditions using a smartphone (battery charge level, feed filling level).
3.6. Figma Tool for Creating Mobile Application Design
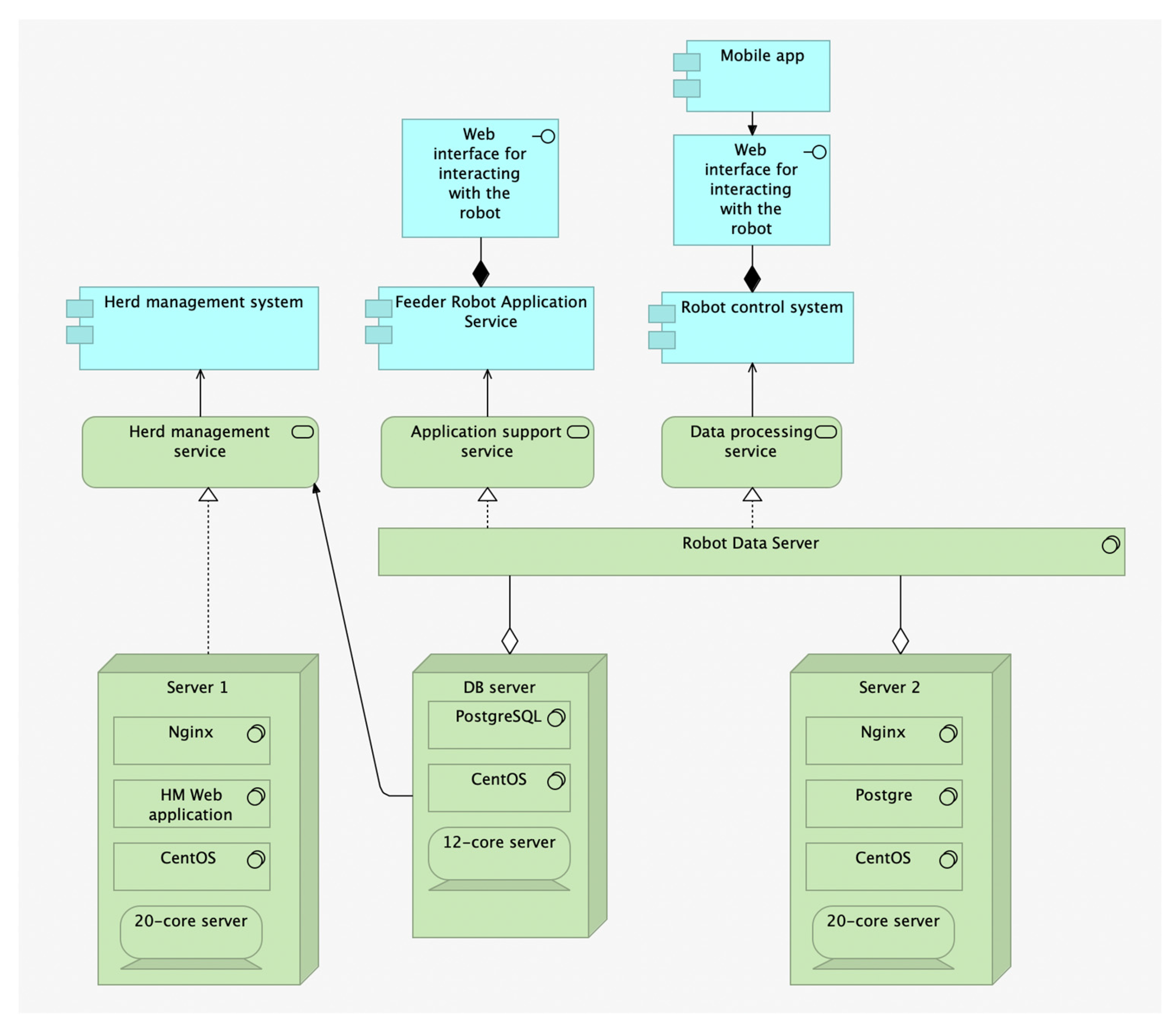
3.7. Designing the Solution Architecture via the Tool Archi
- An application service for the feed-pusher robot. This is required for direct control of the robot; it interacts with the robot using the Web interface;
- Robot control service. This is the key service to ensure the operation of the ecosystem; the user application interacts with this service.
4. Discussion
5. Conclusions
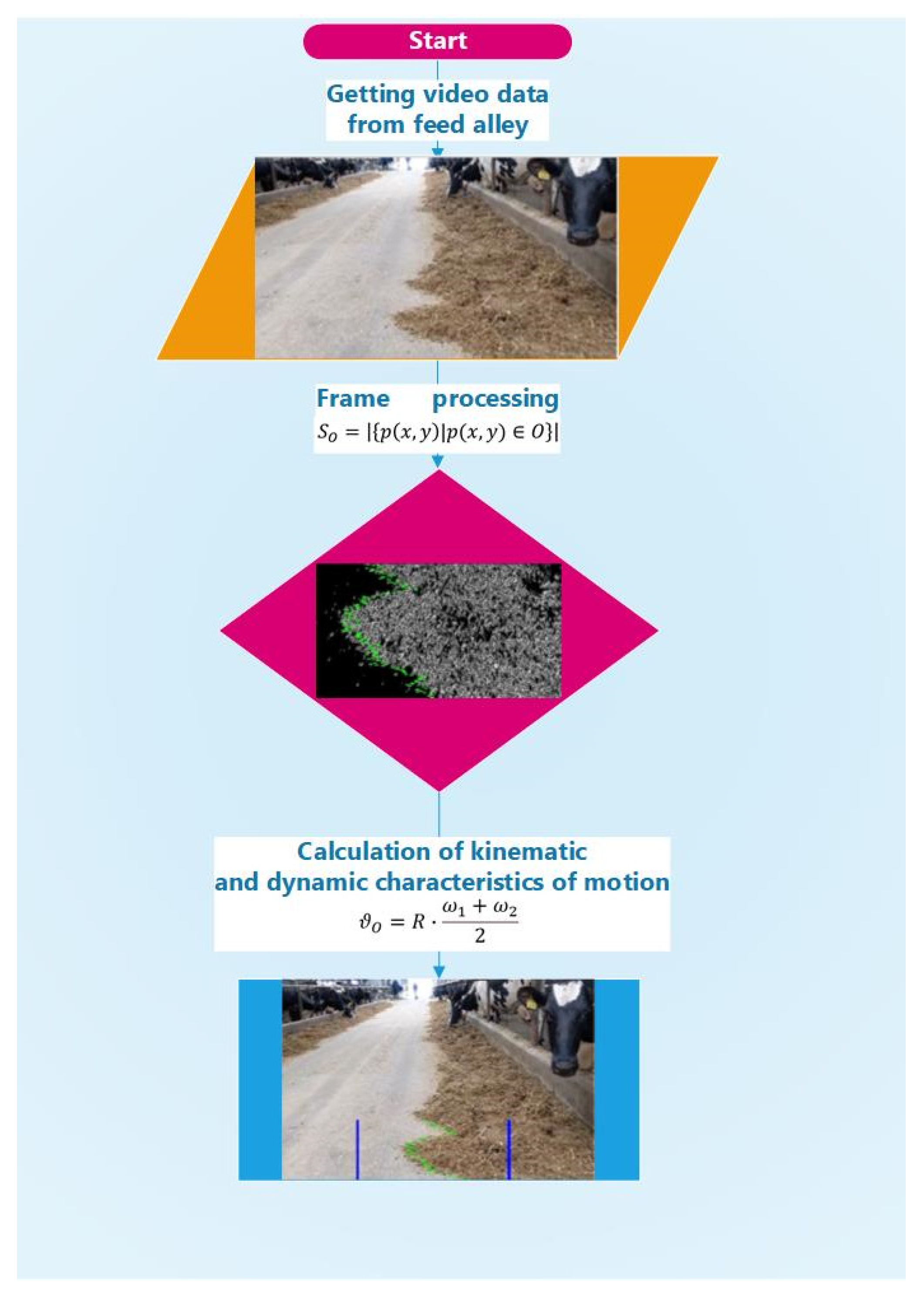
- The authors have developed an algorithm for the automatic positioning system of a wheeled robot with the unique capabilities of a software and hardware complex based on an RGB camera that allows determination of the volume of feed in the feeding alley and guiding the robot along the alley;
- The maximum positioning error of the robot using the developed algorithm for the vision system did not exceed 20 mm relative to the center of mass of the robot during the tests;
- The authors have developed mobile application that allows for adjustments to the device’s operation regardless of location, 24/7. The operator received an alert on their smartphone when the amount of feed on the feed table was below critical.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shahbandeh, M. Global Cow Milk Production 2015 to 2020. Available online: https://www.statista.com/topics/4649/dairyindustry/ (accessed on 1 June 2023).
- Klerkx, L.; Jakku, E.; Labarthe, P. Review of Social Sciences on Digital Agriculture, Smart agriculture and Agriculture 4.0: New materials and a program for future research. NJAS Wagening. J. Life Sci. 2019, 90–91, 100315. [Google Scholar] [CrossRef]
- Fox, G.; Mooney, J.; Rosati, P.; Lynn, T. Innovators of agricultural technology: A study of the initial introduction and further use of a mobile digital platform by family farming enterprises. Agric. Ind. 2021, 11, 1283. [Google Scholar] [CrossRef]
- Kassahun, A.; Blue, R.; Katal, S.; Mishra, A. Dairy farm management information systems. Electronics 2022, 11, 239. [Google Scholar] [CrossRef]
- Luis, O.; Tedeschi, P.L.; Greenwood, I.G. Advances in sensor technology and intelligent decision support tools to promote intelligent animal husbandry. J. Anim. Sci. 2021, 99, skab038. [Google Scholar] [CrossRef]
- Nikitin, E.A. The system of robotic maintenance of the feed lot at livestock complexes. Mach. Equip. Rural. Areas 2020, 276, 26–30. [Google Scholar] [CrossRef]
- Pavkin, D.Y.; Shilin, D.V.; Nikitin, E.A.; Kiryushin, I.A. Design and modeling of the control process of a feed pusher robot used on a dairy farm. Appl. Sci. 2021, 11, 10665. [Google Scholar] [CrossRef]
- Reger, M.; Bernhardt, H.; Stumpenhausen, J. Navigation and personal protection in automatic power systems. Actual Tasks Agric. Eng. 2017, 45, 523–530. [Google Scholar]
- John, A.J.; Freeman, M.J.; Kerrisk, K.F.; Garcia, S.C.; Clark, C.E.F. Robotic use of pasture dairy cows with different milking frequency. Animal 2019, 13, 1529–1535. [Google Scholar] [CrossRef]
- ABach, N.; Valls, A.; Solans, T. Torrent Associations between nondietary factors and dairy herd performance. J. Dairy Sci. 2008, 91, 3259–3267. [Google Scholar] [CrossRef] [Green Version]
- Galakhmi, I.; Edan, Y.; Malts, E.; Peiper, U.M.; Muallem, U.; Brukenthal, I. Real-time monitoring system of individual feed consumption by a dairy cow. Comput. Electron. Agric. 1998, 20, 131–144. [Google Scholar] [CrossRef]
- Schneider, L.; Volkmann, N.; Kemper, N.; Spindler, B. Feeding behavior of fattening bulls fed six times a day using an automatic feeding system. Boundaries Vet. Sci. 2020, 7, 43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bukens, M.; Bukabu, A.; Chadli, M. Robust adaptive approach to trajectory tracking management based on a neural network for uneconomical mobile robots with electric drive. Robot. Auton. Syst. 2017, 92, 30–40. [Google Scholar] [CrossRef]
- Gene, H. Fault-tolerant iterative learning control for mobile robots with non-repeating trajectory tracking with output restrictions. Automatica 2018, 94, 63–71. [Google Scholar] [CrossRef]
- De Berg, M.; Gerrits, D.H.P. Computational ejection schemes for robots in the form of a disk. Int. J. Comput. Geom. Appl. 2013, 23, 29–48. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Jin, P.; Zou, T.; Qi, Z.Y.; Xiao, H.N.; Lu, P.H. Tracking the trajectory of the reverse step based on fuzzy sliding mode control for differential mobile robots. J. Intell. Robot. Syst. 2019, 96, 109–121. [Google Scholar] [CrossRef]
- Sekiguchi, S.; Yorozu, A.; Kuno, K.; Okada, M.; Watanabe, Y.; Takahashi, M. Development of a human-friendly control system for a two-wheeled service robot with an optimal approach to management. Robot. Auton. Syst. 2020, 131, 103562. [Google Scholar] [CrossRef]
- Miller-Cushon, E.K.; DeVries, T.J. Feed sorting in dairy cattle: Causes, consequences, and management. J. Dairy Sci. 2017, 100, 4172–4183. [Google Scholar] [CrossRef] [PubMed]
- Bach, A.; Iglesias, K.; Busto, I. Technical Note: A computerized system for monitoring feeding behavior and individual feed consumption by dairy cattle. J. Dairy Sci. 2004, 87, 4207–4209. [Google Scholar] [CrossRef]
- Nithirajan, S.; Kemp, B. Digital animal husbandry. Sens. Biosensory Res. 2021, 32, 100408. [Google Scholar]
- Ota, T.; Iwasaki, Y.; Nakano, A.; Kuribara, H.; Higashide, T. Development of yield and harvesting time monitoring system for tomato greenhouse production. Eng. Agric. Environ. Food 2018, 12, 40–47. [Google Scholar] [CrossRef]
- Gupta, G.S.; Seelye, M.; Seelye, J.; Bailey, D. Autonomous Anthropomorphic Robotic System with Low-Cost Colour Sensors to Monitor Plant Growth in a Laboratory; In-Tech: London, UK, 2012; 22p. [Google Scholar]
- Nikitin, E.A.; Dorokhov, A.S.; Pavkin, D.Y. Improving the technology of preparation of feed mixture during the reconstruction of feeding grounds. Mach. Equip. Village 2019, 269, 32–34. (In Russian) [Google Scholar] [CrossRef]
- Dos Santos, F.N.; Sobreira, H.M.P.; Campos, D.F.B.; Morais, R.; Moreira, A.P.G.M.; Contente, O.M.S. Towards a reliable monitoring robot for mountain vineyards. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Potugal, 8–10 April 2015; pp. 37–43. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Cumenti, A.; Sartori, L.; Da Borso, F. Automatic feeding systems: Assessment of energy consumption and labor needs on a dairy farm in northeastern Italy. Eng. Rural. Dev. 2016, 15, 882–887. (In English) [Google Scholar]
- Dos Santos Xaud, M.F.; Leite, A.C.; Barbosa, E.S.; Faria, H.D.; Loureiro, G.; From, P.J. Robotic tankette for intelligent bioenergy agriculture: Design, development and field tests. In Proceedings of the XXII Congresso Brasileiro de Automatica (CBA2018), Joao Pessoa, Brazil, 9–12 September 2018; p. 1357. [Google Scholar] [CrossRef]
- Kupreenko, A.I.; Isaev, H.M.; Mikhailichenko, S.M. Operation of an automatic feed wagon on a dairy farm [Electronic resource]. Tract. Agric. Mach. 2018, 40, 32–33. [Google Scholar]
- Da Borso, F.; Ciumenti, A.; Sigura, M.; Pezzuolo, A. The influence of automatic feeding systems on the design and management of dairy farms. J. Agric. Eng. 2017, 48, 48–52. (In English) [Google Scholar] [CrossRef] [Green Version]
- Obershetzl, R.; Haydn, B.; Neiber, J.; Neser, S. Automatic cattle feeding systems—A study of energy consumption of technologies. In Proceedings of the XXXVI Conference CIOSTA CIGR V, St. Petersburg, Russia, 26–28 May 2015; pp. 1–9. [Google Scholar]
- Vdovenko, V.N. Automated feeding systems (SAK) [Automated feeding systems (AFS)]. Farmer Volga Area 2017, 65, 80–89. [Google Scholar]
- Tangorra, F.M.; Calcante, A. Energy consumption and technical and economic analysis of an automatic feeding system for dairy farms: Results of field tests. J. Agric. Eng. 2018, 49, 228–232. (In English) [Google Scholar] [CrossRef]
- Kupreenko, A.I.; Isaev, H.M.; Grin, A.M.; Mikhailichenko, S.M.; Kolomeichenko, A.V.; Kuznetsov, Y.u.A.; Kalashnikova, L.V. Automated feed mixture distribution system using a feeding trolley. Inmatech Agric. Eng. 2019, 58, 239–246. [Google Scholar]
- Bayati, M.; Fotouhi, R. A mobile robotic platform for crop monitoring. Adv. Robot. Autom. 2018, 7, 1000186. [Google Scholar] [CrossRef]
- Dorokhov, A.S.; Nikitin, E.A.; Pavkin, D.Y. Wheeled robotic technical means: Experience and prospects of use on livestock complexes. Mach. Equip. Village 2022, 298, 16–21. [Google Scholar] [CrossRef]
- Bisaglia, K.; Belle, Z.; Van den Berg, G.; Pompe, J. Automatic versus Traditional feeding systems on robotic milking dairy farms: A study in the Netherlands. In Proceedings of the International Conference of Agricultural Engineering CIGR-AgEng, Valencia, Spain, 8–12 July 2012; pp. 100–104. [Google Scholar]
- Grotman, A.; Nidegger, F.; Hausermann, A.; Hartung, E. Automatic feeding system (AFS)—Optimization potential in dairy farming. Landtechnik 2010, 65, 129–131. [Google Scholar]
- Oliveira, L.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Saiz, V.; Rovira, F. From smart farming towards agriculture 5.0: A review on crop data management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef] [Green Version]
- Hang, L.; Tang, L.; Steven, W.; Mei, Y. A robotic platform for corn seedling morphological traits characterization. Sensors 2017, 17, 2082. [Google Scholar] [CrossRef] [Green Version]
- Xie, Z.J.; Gu, S.; Chu, Q.; Li, B.; Fan, K.J.; Yang, Y.; Yang, Y.; Liu, X. Development of a high-productivity grafting robot for Solanaceae. Int. J. Agric. Biol. Eng. 2020, 13, 82–90. [Google Scholar] [CrossRef]
- Jiang, K.; Zhang, Q.; Chen, L.P.; Guo, W.Z.; Zheng, W.G. Design and optimization on rootstock cutting mechanism of grafting robot for cucurbit. Int. J. Agric. Biol. Eng. 2020, 13, 117–124. [Google Scholar] [CrossRef]
- Treiber, M.; Hillerbrand, F.; Bauerdick, J.; Bernhardt, H. On the current state of agricultural robotics in crop farming—Chances and risks. In Proceedings of the 47th Int Symposium “Actual Tasks Agriculture Engineering”, Opatija, Croatia, 5–7 March 2019; pp. 27–33. [Google Scholar]
- Scholz, C.; Moeller, K.; Ruckelshausen, A.; Hinck, S.; Goettinger, M. Automatic soil penetrometer measurements and gis-based documentation with the autonomous field robot platform bonirob. In Proceedings of the 12th International Conference of Precision Agriculture, Sacramento, CA, USA, 20–23 July 2014. [Google Scholar]
- Saiz, V.; Rovira, F.; Millot, C. Performance improvement of a vineyard robot through its mechanical design. In Proceedings of the 2017 ASABE Annual International Meeting, Washington, DC, USA, 16–19 July 2017; p. 1701120. [Google Scholar] [CrossRef]
- Xu, E.; Hou, B.M.; JiaNa, B.I.; Shen, Z.G.; Wang, B. Smart agriculture based on internet of things. In Proceedings of the 2nd International Conference on Robotics, Electrical and Signal Processing Techniques, Dhaka, Bangladesh, 5–7 January 2021; pp. 157–162. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Motion | , Rad/s | , Rad/s | t, s |
|---|---|---|---|
| Rotation around itself by 90° | −28.9 | 28.9 | 0.51 |
| Uniform rectilinear motion | 18.8 | 18.8 | 4 |
| Rotation around itself by 90° | −28.9 | 28.9 | 0.51 |
| Motion along a circle | 18.8 | 18.8 | 2.7 |
| Uniform rectilinear motion | 28.9 | 28.9 | 3 |
| Rotation around itself | 28.9 | −28.9 | 0.8 |
| Uniform rectilinear motion | 28.9 | 28.9 | 2 |
| Rotation around itself | 28.9 | −28.9 | 0.1 |
| x, m | 0 | −0.0123 | −0.012 | −1.76 | −0.79 | −0.79 | −2.99 | −2.99 |
| y, m | 0 | 3.6 | 3.6 | 1.37 | −2.64 | −2.64 | −0.98 | −0.98 |
| , ° | 90.195 | 90.195 | 180.39 | 283.5 | 283.5 | 142.9 | 142.95 | 37.53 |
| 0.6993 | 0 | 0 | 0 | 0 | |||||
| 0 | 0.3024 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.6033 | 0.5747 | 0 | 0 | 0 | |||||
| 0.0975 | 0.3007 | 0 | 0.4268 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.5103 | 0.5096 | 0.5053 | 0 | 0 | |||||
| 0.1850 | 0.3042 | 0.0709 | 0.4211 | 0 | 0.4967 | 0 | 0 | 0 | 0 |
| 0.4165 | 0.4065 | 0.4243 | 0.4196 | 0 | |||||
| 0.2871 | 0.2969 | 0.1714 | 0.4228 | 0.0719 | 0.5055 | 0 | 0.5812 | 0 | 0 |
| 0.3052 | 0.3074 | 0.3067 | 0.2994 | 0.2961 | |||||
| 0.4015 | 0.2929 | 0.2813 | 0.4118 | 0.1956 | 0.4987 | 0.1262 | 0.5749 | 0 | 0.7046 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavkin, D.Y.; Nikitin, E.A.; Shilin, D.V.; Belyakov, M.V.; Golyshkov, I.A.; Mikhailichenko, S.; Chepurina, E. Development Results of a Cross-Platform Positioning System for a Robotics Feed System at a Dairy Cattle Complex. Agriculture 2023, 13, 1422. https://doi.org/10.3390/agriculture13071422
Pavkin DY, Nikitin EA, Shilin DV, Belyakov MV, Golyshkov IA, Mikhailichenko S, Chepurina E. Development Results of a Cross-Platform Positioning System for a Robotics Feed System at a Dairy Cattle Complex. Agriculture. 2023; 13(7):1422. https://doi.org/10.3390/agriculture13071422
Chicago/Turabian StylePavkin, Dmitriy Yu., Evgeniy A. Nikitin, Denis V. Shilin, Mikhail V. Belyakov, Ilya A. Golyshkov, Stanislav Mikhailichenko, and Ekaterina Chepurina. 2023. "Development Results of a Cross-Platform Positioning System for a Robotics Feed System at a Dairy Cattle Complex" Agriculture 13, no. 7: 1422. https://doi.org/10.3390/agriculture13071422