
Design and Experiment of Lightweight Dual-Mode Automatic Variable-Rate Fertilization Device and Control System
Abstract
:1. Introduction
2. Materials and Methods
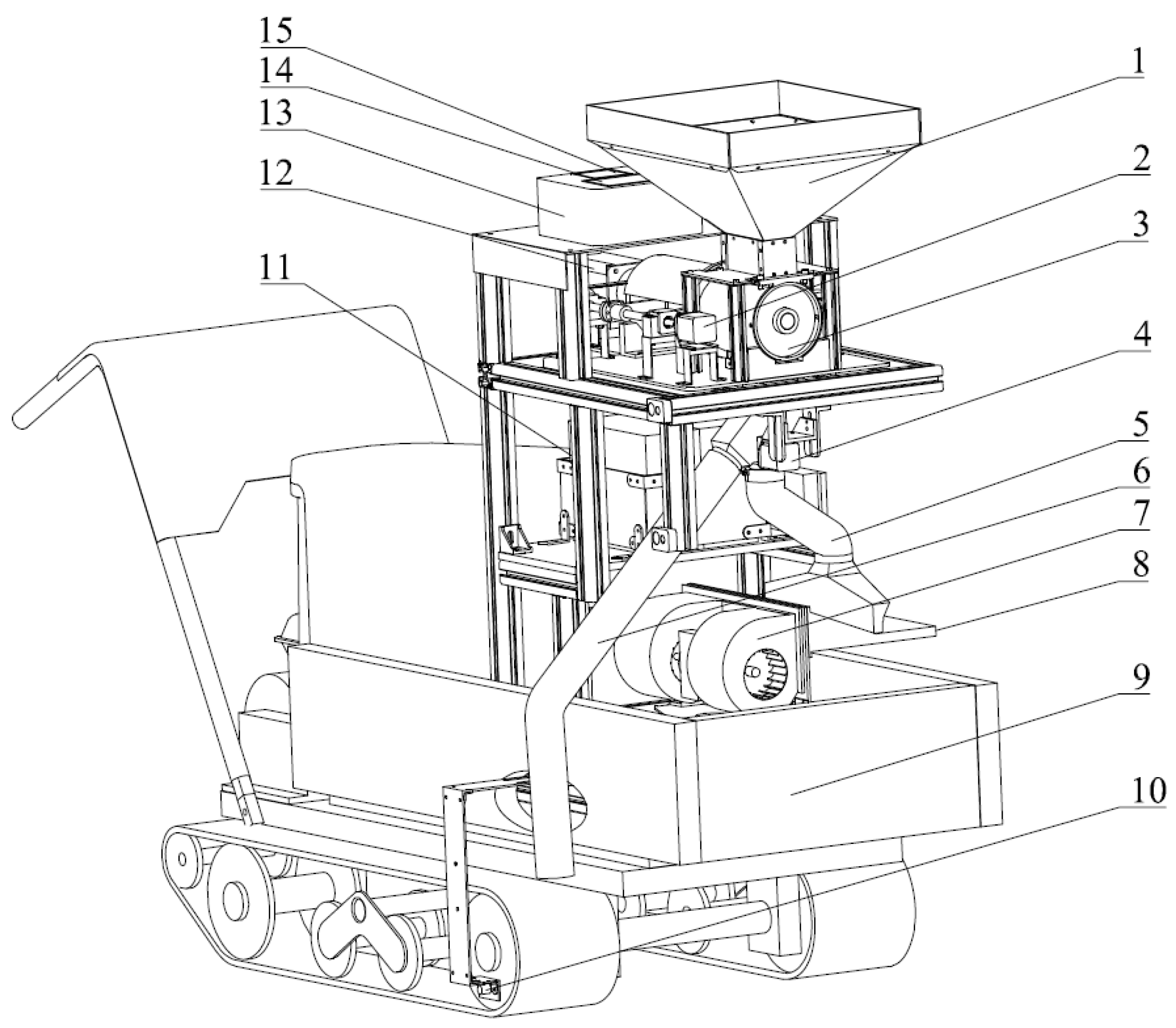
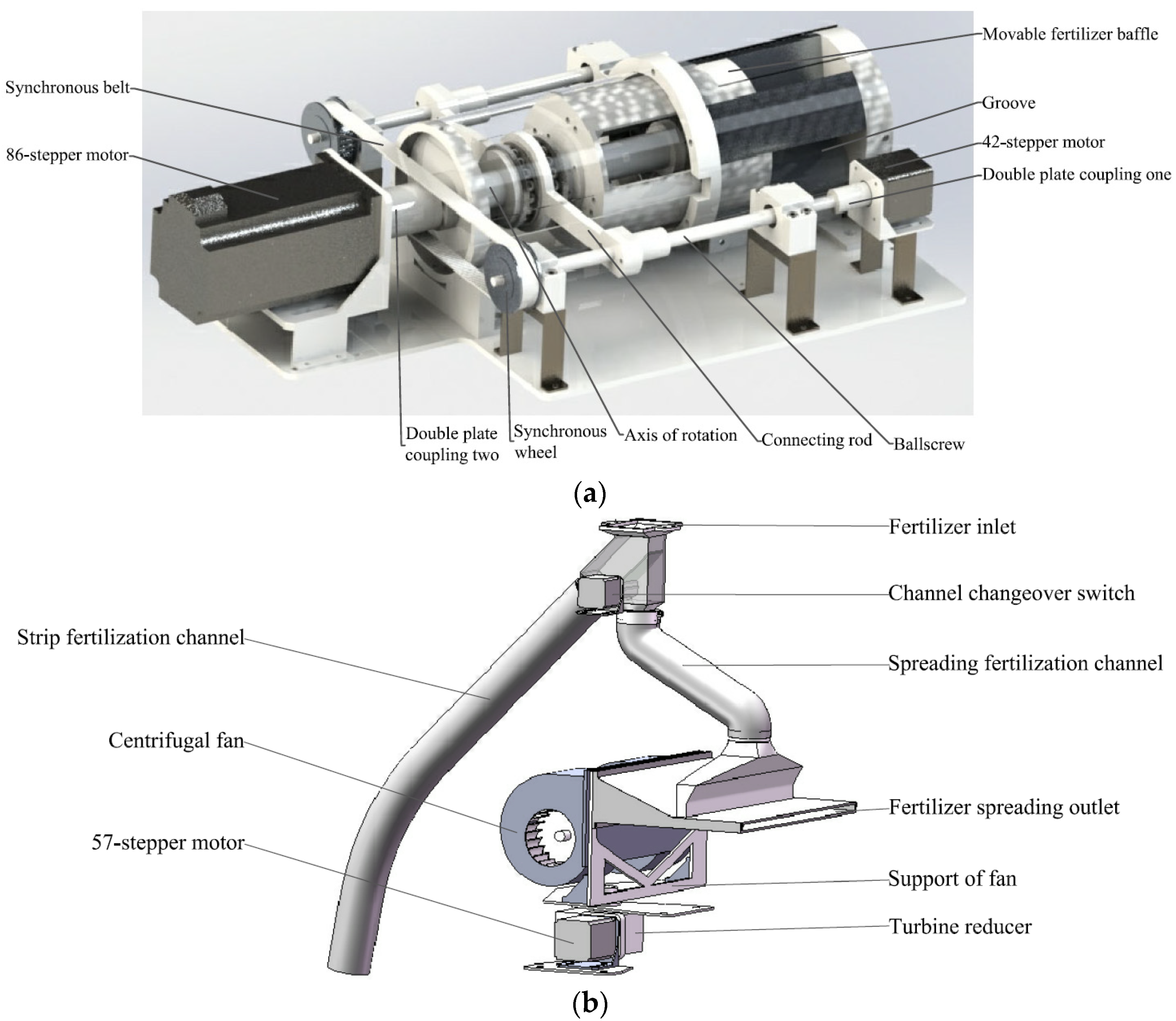
2.1. Overall Design
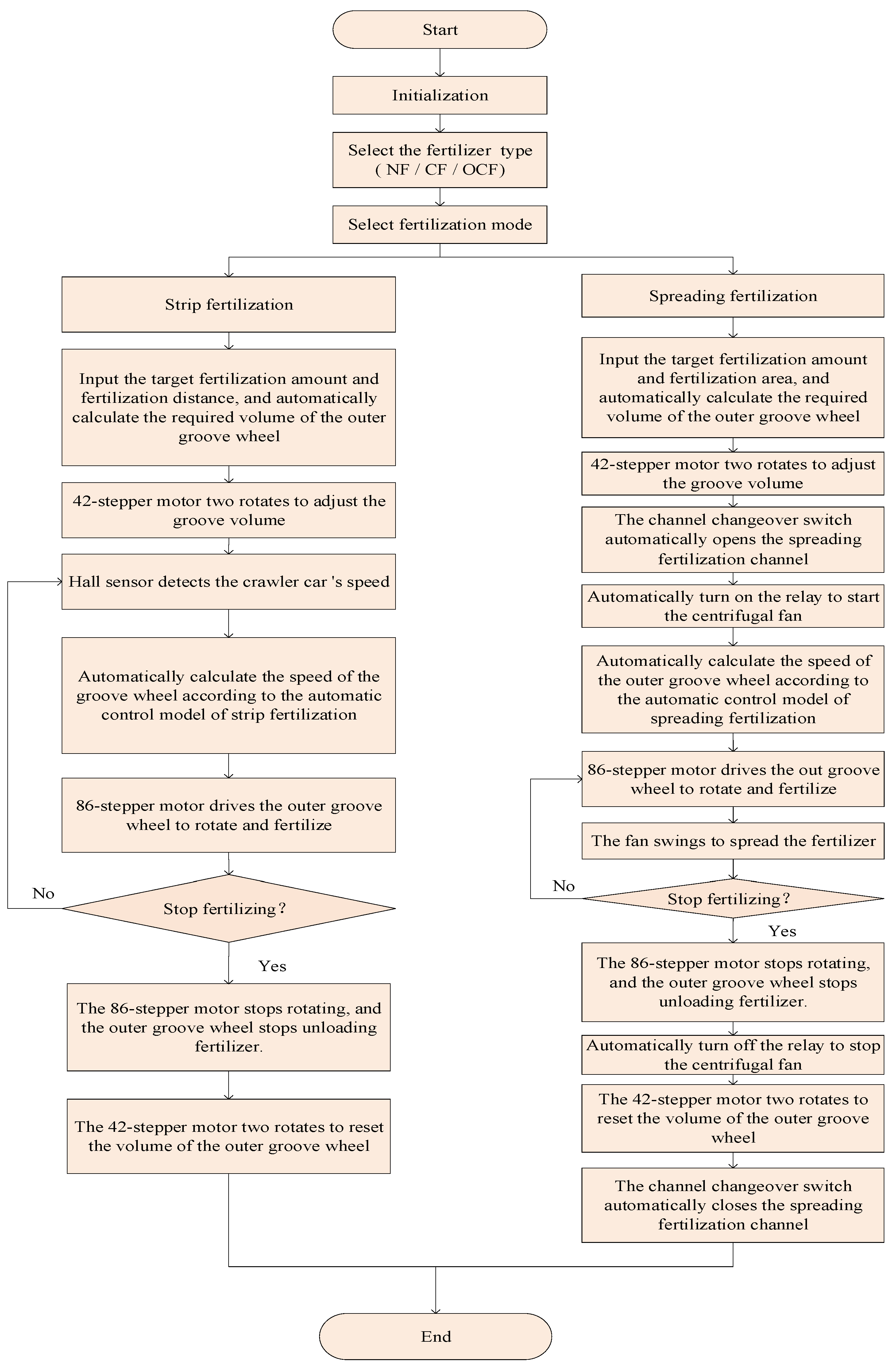
2.2. Working Principle
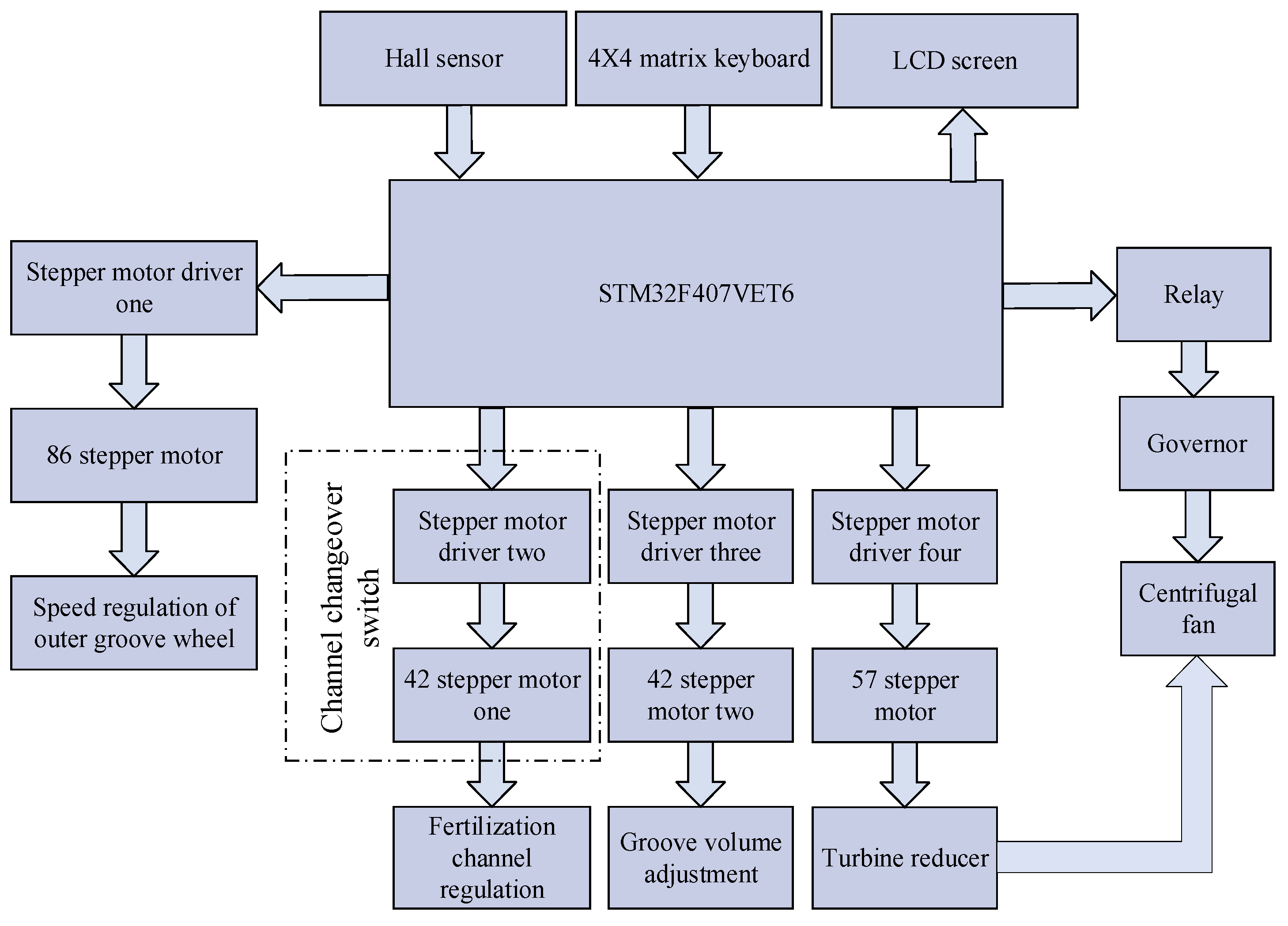
2.3. Control System Design
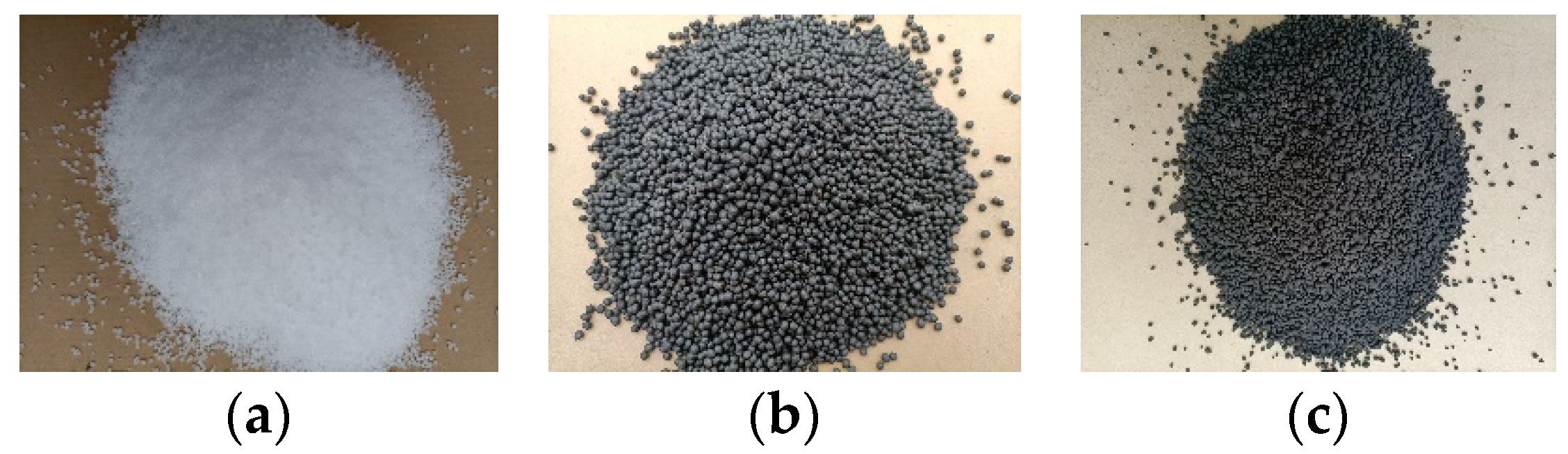
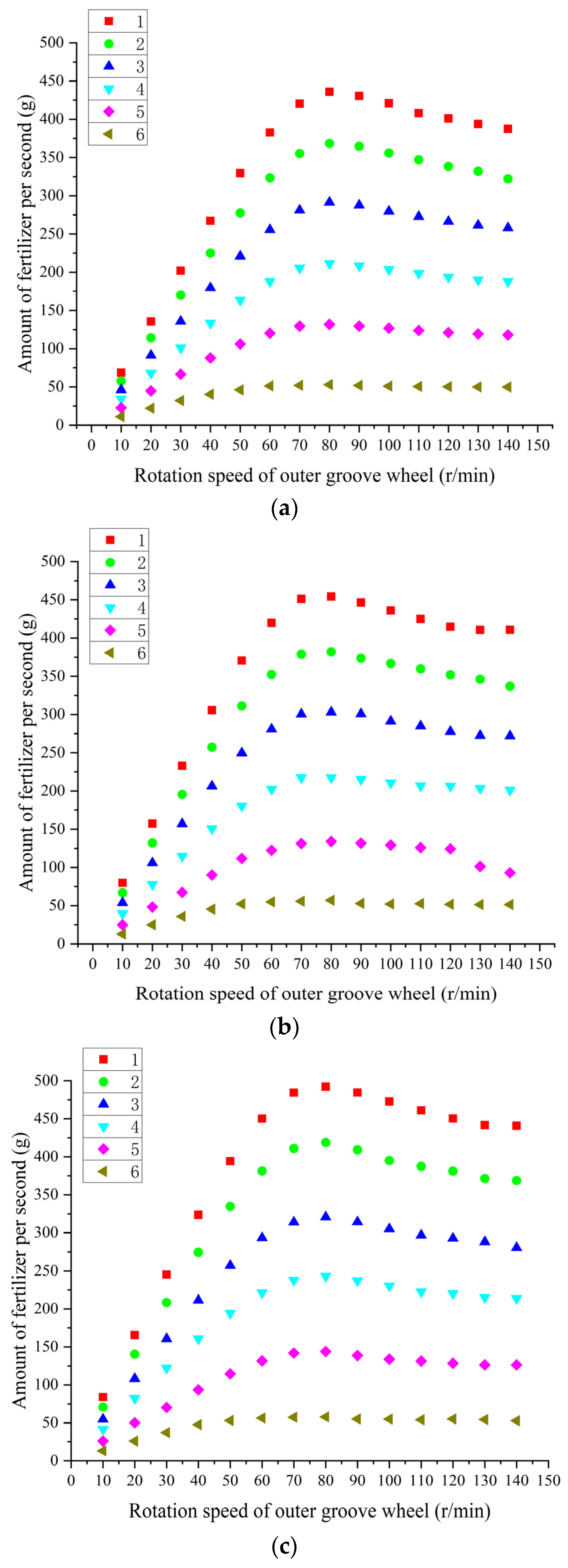
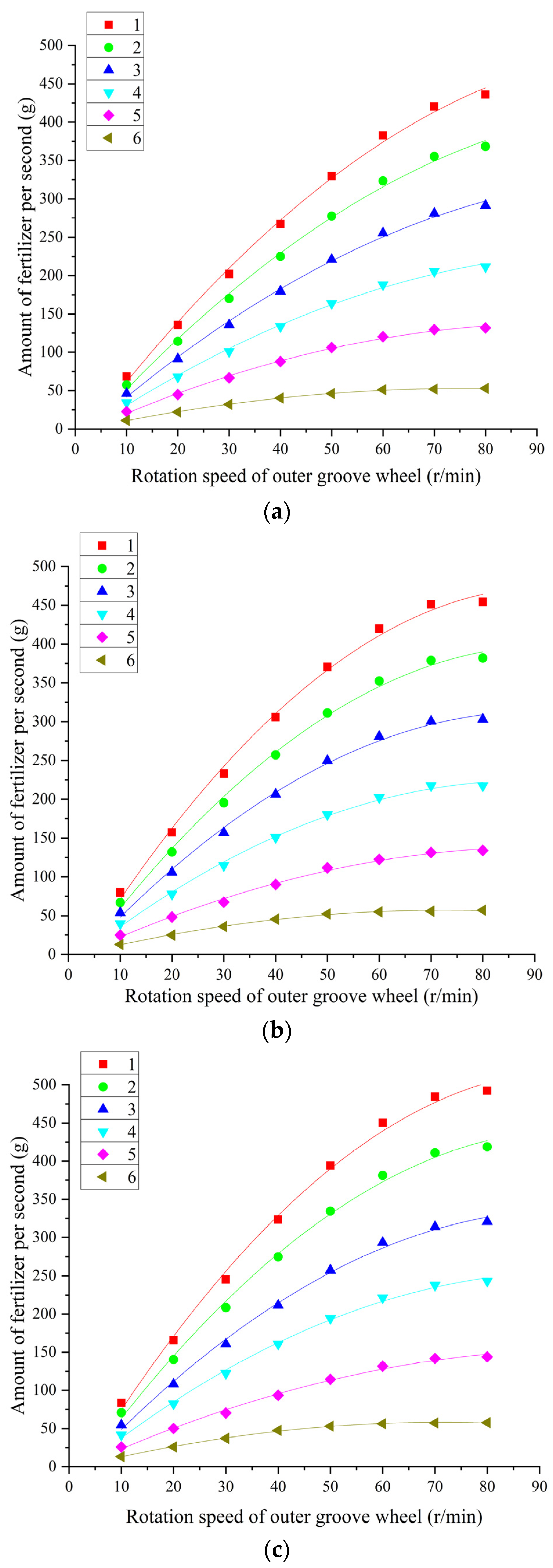
2.4. Determination of Fertilizer Discharge per Second at Different Speeds
2.5. Strip Fertilization Test
2.6. Spreading Fertilization Test
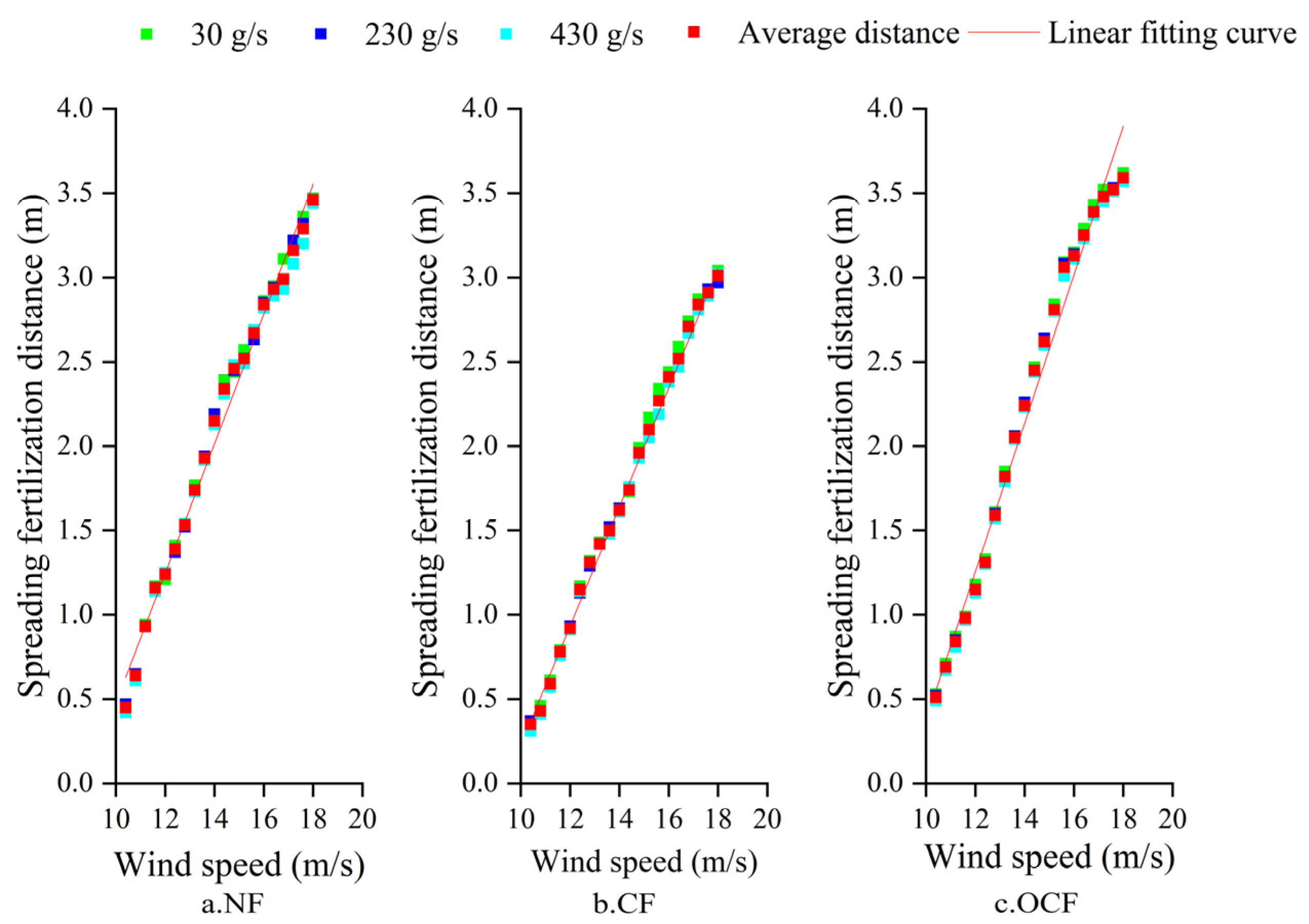
2.6.1. Calibration of the Static Spreading Fertilization Distance
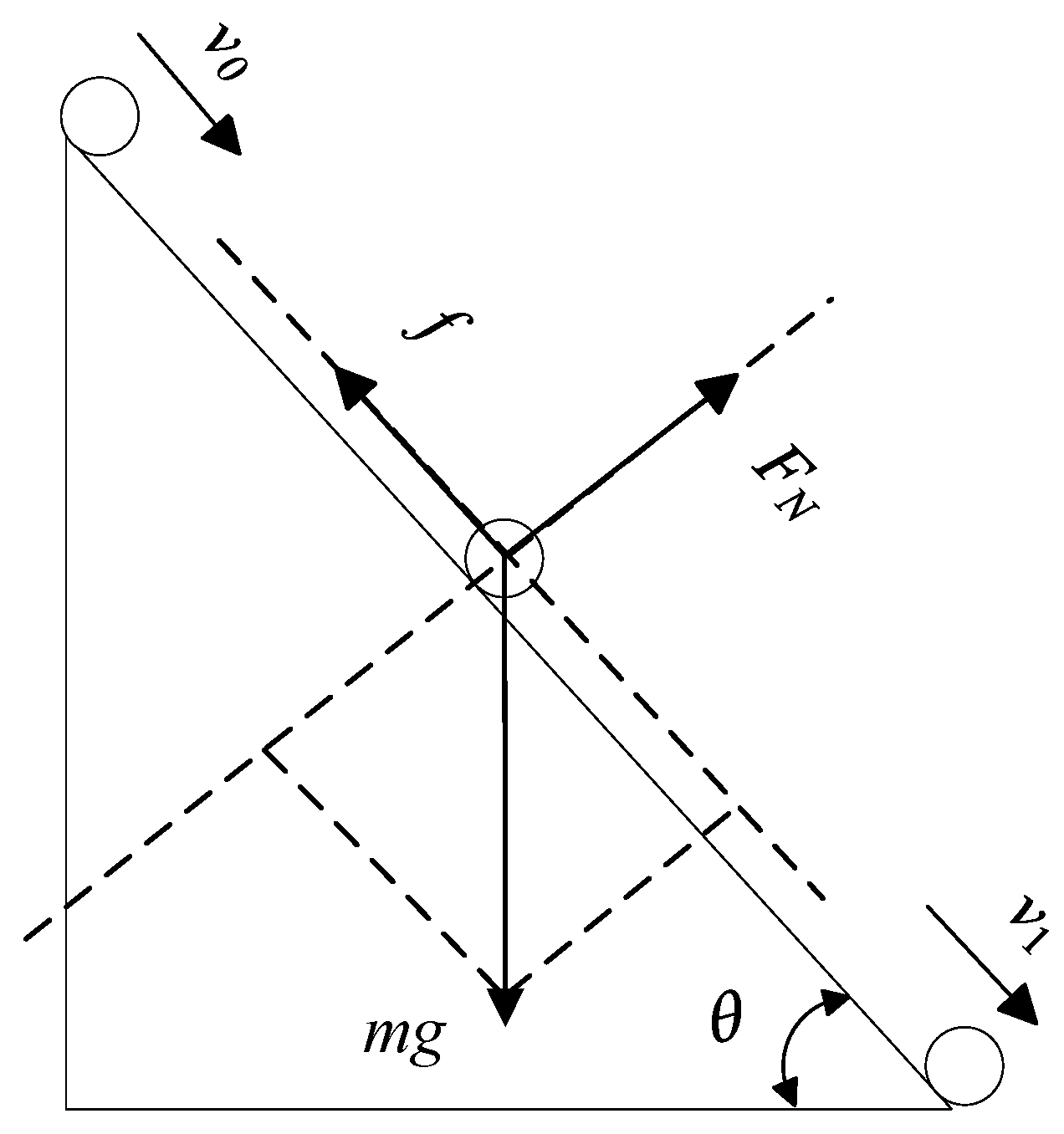
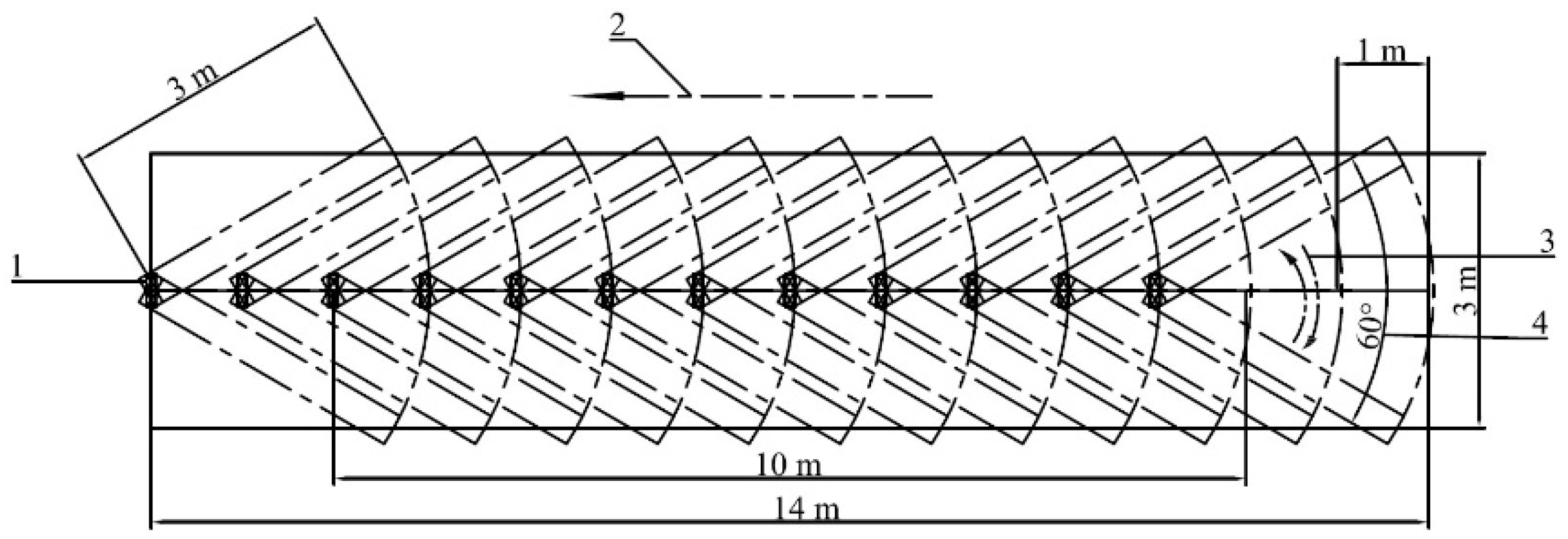
2.6.2. Superimposed Swing Spreading Fertilization Test
3. Results and Discussion
3.1. Strip Fertilization Test Results
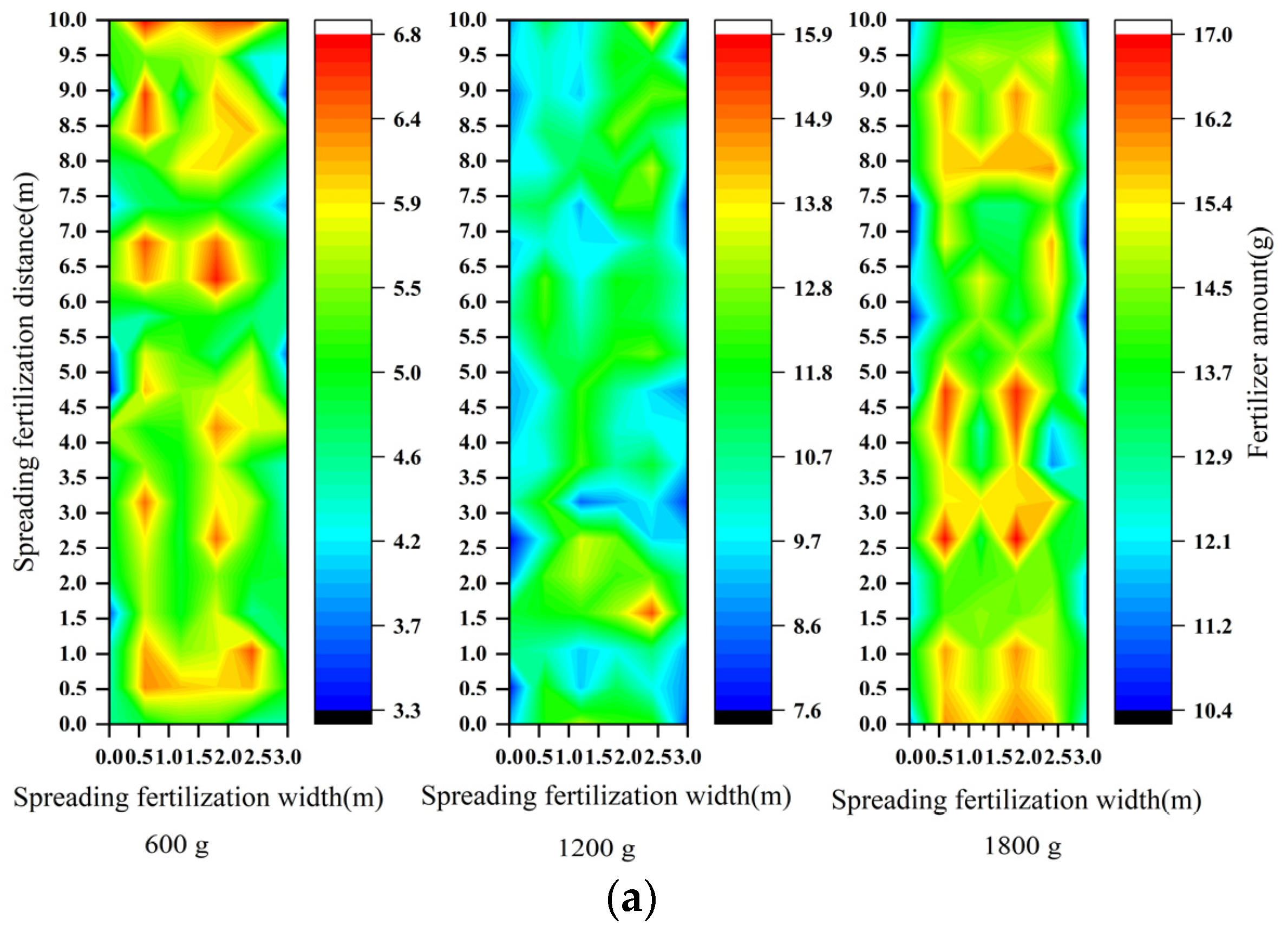
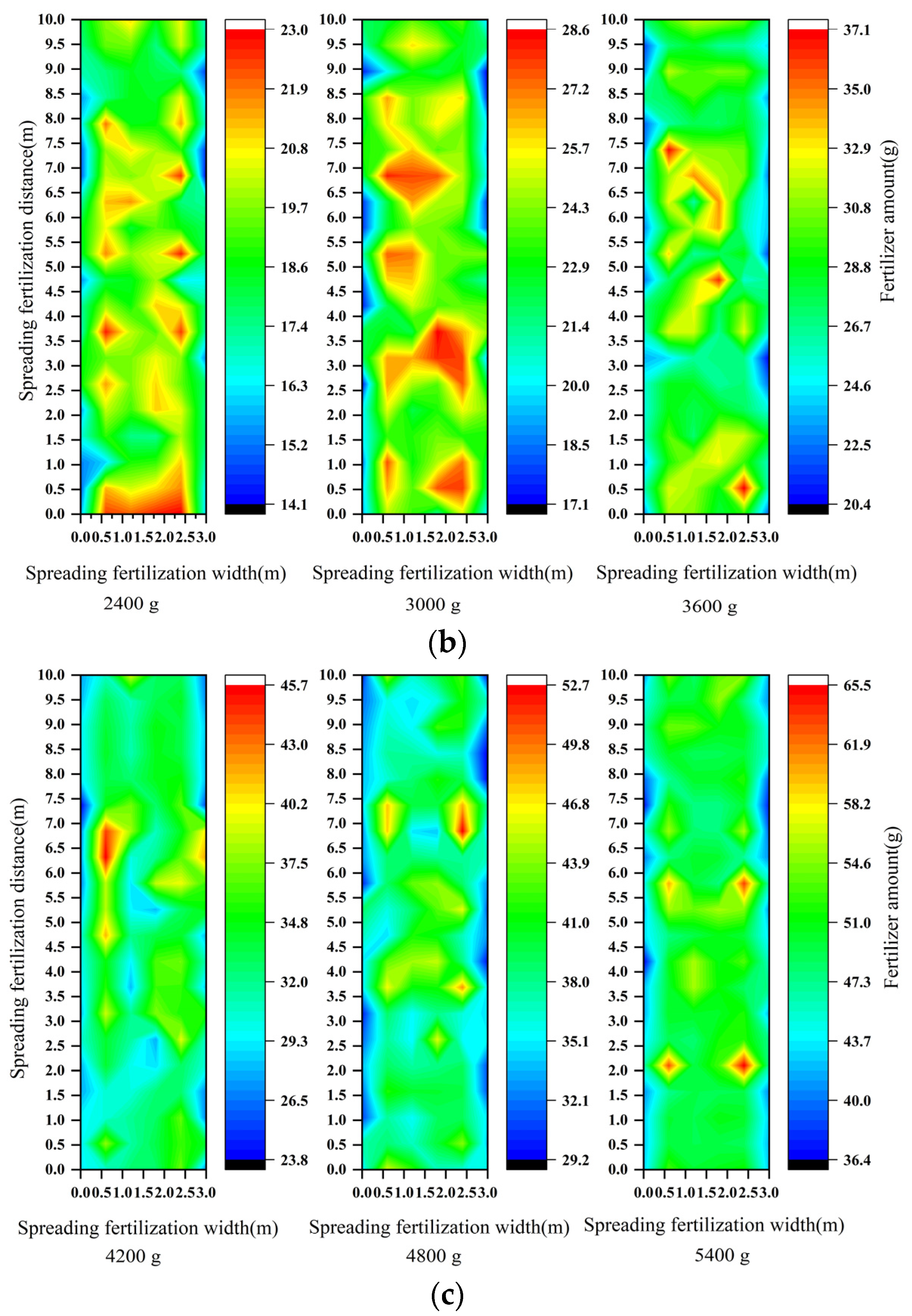
3.2. Superimposed Sowing Spreading Fertilization Test Results
3.3. Discussion
4. Conclusions
- (1)
- In this study, a lightweight dual-mode automatic variable-rate fertilization device was designed, which meets the needs of applying a large amount of organic fertilizer as a base fertilizer and a small amount of chemical fertilizer as top-dressing. The volume adjustment of the fertilization device adopts the transmission mode of a synchronous belt and synchronous wheel, which is achieved by the stepping motor, resulting in improved accuracy and stability of variable-rate fertilization.
- (2)
- The automatic control model of variable-rate strip fertilization and spreading fertilization was established. According to the target fertilization amount, fertilization speed, fertilization distance, or fertilization area, the volume and rotation speed of the fertilization device can be automatically adjusted, while the precise variable-rate strip fertilization and spreading fertilization were achieved through dual variable adjustment. At the same time, the control strategy of adjusting the volume first and then the rotation speed can effectively solve the problem of blocking the fertilizer discharge device caused by adjusting the volume in the process of fertilization.
- (3)
- The maximum relative error of fertilization amount is 6.83%, and the maximum coefficient of variation of uniformity is 8.91% in strip fertilization experiments. In spreading fertilization experiments, the maximum relative error of fertilization amount is 7.43%, the maximum coefficient of variation of lateral uniformity is 8.91%, and the maximum coefficient of variation of total uniformity is 14.17%. This research study achieved precise variable-rate strip fertilization and spreading fertilization, which can meet the fertilization needs of different stages of facility agricultural crop cultivation in China for different fertilization amounts, types, and methods. The accurate application of fertilizers can effectively reduce fertilizer waste, improve fertilizer utilization efficiency, and promote sustainable development of agriculture.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Loneragan, J.F. Plant nutrition in the 20th and perspectives for the 21st century. Plant Soil 1997, 196, 163–174. [Google Scholar] [CrossRef]
- Rahman, K.; Zhang, D. Effects of Fertilizer Broadcasting on the Excessive Use of Inorganic Fertilizers and Environmental Sustainability. Sustainability 2018, 10, 759. [Google Scholar] [CrossRef]
- Wu, H.; Ge, Y. Excessive application of fertilizer, agricultural non-point source pollution, and farmers’ policy choice. Sustainability 2019, 11, 1165. [Google Scholar] [CrossRef]
- Zhang, W. The integration of fertilizer soil pollution and agricultural industry economy based on Apriori algorithm. Arab. J. Geosci. 2021, 14, 1–11. [Google Scholar] [CrossRef]
- Lu, H.J.; Ye, Z.Q.; Zhang, X.L.; Lin, X.Y.; Ni, W.Z. Growth and yield responses of crops and macronutrient balance influenced by commercial organic manure used as a partial substitute for chemical fertilizers in an intensive vegetable cropping system. Phys. Chem. Earth. 2011, 36, 387–394. [Google Scholar] [CrossRef]
- Anonymous. Notice of the Ministry of agriculture and rural areas on printing and distributing the national development plan for Agricultural Mechanization in the 14th five years plan Nongji Fa [2021] No. 2. Gaz. Minist. Agric. Aff. People’s Repub. China 2022, 1, 48–60. [Google Scholar]
- Qian, L.; Lu, H.; Gao, Q.; Lu, H. Household-owned farm machinery vs. outsourced machinery services: The impact of agricultural mechanization on the land leasing behavior of relatively large-scale farmers in China. Land Use Pol. 2022, 115, 106008. [Google Scholar] [CrossRef]
- Sun, J.; Chen, H.; Duan, J.; Liu, Z.; Zhu, Q. Mechanical properties of the grooved-wheel drilling particles under multivariate interaction influenced based on 3D printing and EDEM simulation. Comput. Electron. Agric. 2020, 172, 105329. [Google Scholar] [CrossRef]
- Lv, H.; Yu, J.; Fu, H. Simulation of the operation of a fertilizer spreader based on an outer groove wheel using a discrete element method. Math. Comput. Model. 2013, 58, 842–851. [Google Scholar] [CrossRef]
- Bu, H.; Yu, S.; Dong, W.; Zhang, L.; Xia, Y. Analysis of the Effect of Bivariate Fertilizer Discharger Control Sequence on Fertilizer Discharge Performance. Agriculture 2022, 12, 1927. [Google Scholar] [CrossRef]
- Dang, Y.; Yang, G.; Wang, J.; Zhou, Z.; Xu, Z. A Decision-Making Capability Optimization Scheme of Control Combination and PID Controller Parameters for Bivariate Fertilizer Applicator Improved by Using EDEM. Agriculture 2022, 12, 2100. [Google Scholar] [CrossRef]
- Du, J.; Yang, Q.; Xia, J.; Li, G. Discrete Element Modeling and Verification of an Outer Groove Wheel Fertilizer Applicator with Helical Teeth. Trans. ASABE 2020, 63, 659–665. [Google Scholar] [CrossRef]
- Chen, C.; He, P.; Zhang, J.; Li, X.; Ren, Z.; Zhao, J.; Kang, J. A fixed-amount and variable-rate fertilizer applicator based on pulse width modulation. Comput. Electron. Agric. 2018, 148, 330–336. [Google Scholar] [CrossRef]
- Dun, G.; Gao, Z.; Liu, Y.; Ji, W.; Mao, N.; Wu, X.; Liu, W. Optimization design of fertilizer apparatus owned arc gears based on discrete element method. Int. J. Agric. Biol. Eng. 2021, 14, 97–105. [Google Scholar] [CrossRef]
- Sugirbay, A.M.; Zhao, J.; Nukeshev, S.O.; Chen, J. Determination of pin-roller parameters and evaluation of the uniformity of granular fertilizer application metering devices in precision farming. Comput. Electron. Agric. 2020, 179, 105835. [Google Scholar] [CrossRef]
- Zhang, X.; Pei, Y.; Chen, Y.; Song, Q.; Zhou, P.; Xia, Y.; Liu, X. The Design and Experiment of Vertical Variable Cavity Base Fertilizer Fertilizing Apparatus. Agriculture 2022, 12, 1793. [Google Scholar] [CrossRef]
- Chang, Y.K.; Zaman, Q.U.; Farooque, A.; Chattha, H.; Read, S.; Schumann, A. Sensing and control system for spot application of granular fertilizer in wild blueberry field. Precis. Agric. 2017, 18, 210–223. [Google Scholar] [CrossRef]
- Chen, H.; Zheng, J.; Lu, S.; Zeng, S.; Wei, S. Design and experiment of vertical pneumatic fertilization system with spiral Geneva mechanism. Int. J. Agric. Biol. Eng. 2021, 14, 135–144. [Google Scholar] [CrossRef]
- Ishola, T.A.; Yahya, A.; Shariff, A.R.M.; Aziz, S.A. A novel variable rate pneumatic fertilizer applicator. Instrum. Sci. Technol. 2014, 42, 369–384. [Google Scholar] [CrossRef]
- Qi, X.; Zhou, Z.; Lin, S. Design of fertilizer spraying device of pneumatic variable-rate fertilizer applicator for rice production J/OL. Trans. Chin. Agric. Mach. 2018, 49, 164–170. [Google Scholar]
- Zha, X.; Zhang, G.; Zhang, S.; Hou, Q.; Wang, Y.; Zhou, Y. Design and experiment of centralized pneumatic deep precision fertilization device for rice transplanter. Int. J. Agric. Biol. Eng. 2020, 13, 109–117. [Google Scholar] [CrossRef]
- Cool, S.R.; Pieters, J.G.; Seatovic, D.; Mertens, K.C.; Nuyttens, D.; Van De Gucht, T.C.; Vangeyte, J. Development of a stereovision-based technique to measure the spread patterns of granular fertilizer spreaders. Sensors 2017, 17, 1396. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.Y.; Chen, M.; Wang, X.C.; Odhiambo, M.O.; Ding, W.M. Numerical simulation of spreading performance and distribution pattern of centrifugal variable-rate fertilizer applicator based on DEM software. Comput. Electron. Agric. 2018, 144, 249–259. [Google Scholar]
- Shi, Y.; Hu, Z.; Wang, X.; Odhiambo, M.O.; Ding, W. Motion analysis and system response of fertilizer feed apparatus for paddy variable-rate fertilizer spreader. Comput. Electron. Agric. 2018, 153, 239–247. [Google Scholar]
- Guan, Z.; Mu, S.; Jiang, T.; Li, H.; Zhang, M.; Wu, C.; Jin, M. Development of Centrifugal Disc Spreader on Tracked Combine Harvester for Rape Undersowing Rice Based on DEM. Agriculture 2022, 12, 562. [Google Scholar] [CrossRef]
- Yang, X.F. Technical Manual for Fertilization of Melon and Vegetable; China Agriculture Press: Beijing, China, 2001; pp. 93–97. [Google Scholar]
- Nations, F. Fertilizers and Their Use: A Pocket Guide for Extension Officers; Food & Agriculture Org: Rome, Italy, 2000; pp. 1–78. [Google Scholar]
- Yang, Z.W.; Ma, H.L.; Zhang, X.S.; Ma, X. GB/T 20346.1-2006; Equipment for Distributing Fertilizers—Test Methods—Part 2: Fertilizer Distributor in Lines. Standards Press of China: Beijing, China, 2006; pp. 1–17.
- Yang, Z.W. GB/T 20346.2-2006; Equipment for Distributing Fertilizers—Test Methods—Part 1: Full Width Fertilizer Distributors. Standards Press of China: Beijing, China, 2006; pp. 1–18.
- Ministry of Agriculture of the PRC. Technical Specifications of Quality Evaluation for Fertilizing Machinery; China Agriculture Press: Beijing, China, 2006; pp. 1–10. [Google Scholar]
- Zhu, Q.; Wu, G.; Chen, L.; Zhao, C.; Meng, Z. Influences of structure parameters of straight flute wheel on fertilizing performance of fertilizer apparatus. Trans. CSAE 2018, 34, 12–20. [Google Scholar]
- Zhang, J.; Liu, G.; Luo, C.; Hu, H.; Huang, J. MOEA/D-DE based bivariate control sequence optimization of a variable-rate fertilizer applicator. Comput. Electron. Agric. 2019, 167, 105063. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fertilizer Type | Grain Size (mm) | Bulk Density (g/cm3) | Dynamic Friction Coefficient (Fertilizer–PVC Pipe) | Dynamic Friction Coefficient (Fertilizer–Fertilizer) |
|---|---|---|---|---|
| NF | 2.0~3.58 | 0.75 | 0.06 | 0.16 |
| CF | 3.35~5.6 | 0.84 | 0.14 | 0.23 |
| OCF | 1.0~4.75 | 0.89 | 0.09 | 0.18 |
| Fertilizer Type | Groove Volume | Coefficient | Constant | R2 | p-Value |
|---|---|---|---|---|---|
| NF | 1 | 5.477 | 33.740 | 0.974 | 3.535 × 10−6 |
| 2 | 4.635 | 27.868 | 0.975 | 3.278 × 10−6 | |
| 3 | 3.651 | 23.412 | 0.973 | 3.736 × 10−6 | |
| 4 | 2.641 | 19.304 | 0.967 | 7.109 × 10−6 | |
| 5 | 1.626 | 15.546 | 0.952 | 2.264 × 10−5 | |
| 6 | 0.600 | 11.463 | 0.892 | 2.574 × 10−4 | |
| CF | 1 | 5.615 | 56.263 | 0.947 | 3.008 × 10−5 |
| 2 | 4.719 | 47.159 | 0.947 | 2.962 × 10−5 | |
| 3 | 3.729 | 39.300 | 0.943 | 3.762 × 10−5 | |
| 4 | 2.661 | 30.304 | 0.939 | 4.591 × 10−5 | |
| 5 | 1.625 | 18.134 | 0.946 | 3.211 × 10−5 | |
| 6 | 0.627 | 14.167 | 0.862 | 5.412 × 10−4 | |
| OCF | 1 | 6.118 | 54.585 | 0.954 | 1.907 × 10−5 |
| 2 | 5.197 | 46.071 | 0.955 | 1.769 × 10−5 | |
| 3 | 3.970 | 36.286 | 0.953 | 2.043 × 10−5 | |
| 4 | 3.000 | 27.978 | 0.954 | 1.896 × 10−5 | |
| 5 | 1.774 | 16.650 | 0.959 | 1.391 × 10−5 | |
| 6 | 0.634 | 15.001 | 0.849 | 7.111 × 10−4 |
| Fertilizer Type | Groove Volume | B1 | B2 | C | R2 | p-Value |
|---|---|---|---|---|---|---|
| NF | 1 | −0.039 | 8.966 | −24.417 | 0.996 | 4.102 × 10−7 |
| 2 | −0.032 | 7.536 | −20.495 | 0.996 | 4.502 × 10−7 | |
| 3 | −0.026 | 6.017 | −16.018 | 0.996 | 3.246 × 10−7 | |
| 4 | −0.021 | 4.564 | −12.748 | 0.996 | 4.095 × 10−7 | |
| 5 | −0.016 | 3.100 | −9.020 | 0.996 | 3.414 × 10−7 | |
| 6 | −0.010 | 1.460 | −2.860 | 0.999 | 2.594 × 10−8 | |
| CF | 1 | −0.059 | 10.928 | −32.284 | 0.995 | 6.571 × 10−7 |
| 2 | −0.050 | 9.176 | −27.126 | 0.995 | 6.107 × 10−7 | |
| 3 | −0.041 | 7.417 | −22.163 | 0.996 | 5.561 × 10−7 | |
| 4 | −0.030 | 5.395 | −15.269 | 0.996 | 4.876 × 10−7 | |
| 5 | −0.017 | 3.160 | −7.448 | 0.995 | 1.393 × 10−6 | |
| 6 | −0.011 | 1.650 | −2.891 | 0.997 | 2.125 × 10−7 | |
| OCF | 1 | −0.059 | 11.429 | −33.932 | 0.995 | 6.796 × 10−7 |
| 2 | −0.049 | 9.670 | −28.475 | 0.996 | 5.055 × 10−7 | |
| 3 | −0.039 | 7.481 | −22.227 | 0.996 | 4.968 × 10−7 | |
| 4 | −0.029 | 5.632 | −15.911 | 0.997 | 3.126 × 10−7 | |
| 5 | −0.016 | 3.196 | −7.051 | 0.995 | 1.490 × 10−6 | |
| 6 | −0.012 | 1.726 | −3.201 | 0.998 | 8.829 × 10−8 |
| Fertilizer Type | Groove Volume | Fertilizer Discharged per Second (g) | |
|---|---|---|---|
| 15 r/min | 80 r/min | ||
| NF | 1 | 101.37 | 445.20 |
| 2 | 85.30 | 376.33 | |
| 3 | 68.31 | 297.00 | |
| 4 | 50.92 | 216.05 | |
| 5 | 33.79 | 134.04 | |
| 6 | 16.88 | 52.52 | |
| CF | 1 | 118.36 | 464.32 |
| 2 | 99.37 | 390.13 | |
| 3 | 79.89 | 309.43 | |
| 4 | 58.84 | 222.41 | |
| 5 | 36.12 | 136.53 | |
| 6 | 19.30 | 56.17 | |
| OCF | 1 | 124.22 | 502.76 |
| 2 | 105.39 | 427.04 | |
| 3 | 81.21 | 326.62 | |
| 4 | 62.00 | 247.77 | |
| 5 | 37.34 | 147.52 | |
| 6 | 19.96 | 57.42 | |
| Fertilizer Type | a1 | b1 | R2 |
|---|---|---|---|
| NF | 0.385 | −3.374 | 0.988 |
| CF | 0.361 | −3.401 | 0.996 |
| OCF | 0.440 | −4.027 | 0.984 |
| Fertilizer Type | Theoretical Fertilizer Amount (g) | Actual Fertilizer Amount (g) | Relative Error | Coefficient of Variation of Uniformity |
|---|---|---|---|---|
| NF | 720 | 764.4 | 6.17% | 8.59% |
| 1440 | 1341.9 | 6.81% | 7.88% | |
| 2160 | 2078.4 | 3.78% | 8.76% | |
| CF | 2880 | 3017.3 | 4.77% | 8.73% |
| 3600 | 3823.2 | 6.20% | 8.81% | |
| 4320 | 4456.9 | 3.17% | 5.90% | |
| OCF | 5040 | 4695.8 | 6.83% | 7.94% |
| 5760 | 5529.6 | 4.00% | 8.87% | |
| 6480 | 6230.5 | 3.85% | 8.91% |
| Fertilizer Type | Theoretical Fertilizer Amount (g) | Actual Fertilizer Amount (g) | Relative Error | Coefficient of Variation of Lateral Uniformity | Coefficient of Variation of Total Uniformity |
|---|---|---|---|---|---|
| NF | 600 | 640.3 | 6.72% | 9.56% | 13.97% |
| 1200 | 1277.9 | 6.49% | 8.71% | 14.17% | |
| 1800 | 1668.4 | 7.31% | 9.70% | 11.61% | |
| CF | 2400 | 2259.9 | 5.84% | 8.70% | 10.97% |
| 3000 | 2798 | 6.73% | 9.58% | 12.22% | |
| 3600 | 3356.6 | 6.76% | 9.88% | 13.09% | |
| OCF | 4200 | 3905.9 | 7.00% | 8.79% | 12.86% |
| 4800 | 4535.7 | 5.51% | 8.86% | 12.33% | |
| 5400 | 5801.1 | 7.43% | 9.48% | 11.07% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Q.; Luo, H.; Fu, X.; Zhang, X.; Li, G. Design and Experiment of Lightweight Dual-Mode Automatic Variable-Rate Fertilization Device and Control System. Agriculture 2023, 13, 1138. https://doi.org/10.3390/agriculture13061138
Bai Q, Luo H, Fu X, Zhang X, Li G. Design and Experiment of Lightweight Dual-Mode Automatic Variable-Rate Fertilization Device and Control System. Agriculture. 2023; 13(6):1138. https://doi.org/10.3390/agriculture13061138
Chicago/Turabian StyleBai, Qiuwei, Hongpin Luo, Xinglan Fu, Xin Zhang, and Guanglin Li. 2023. "Design and Experiment of Lightweight Dual-Mode Automatic Variable-Rate Fertilization Device and Control System" Agriculture 13, no. 6: 1138. https://doi.org/10.3390/agriculture13061138