
Double Disc Colter for a Zero-Till Seeder Simultaneously Applying Granular Fertilizers and Wheat Seeds

 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Materials and Methods
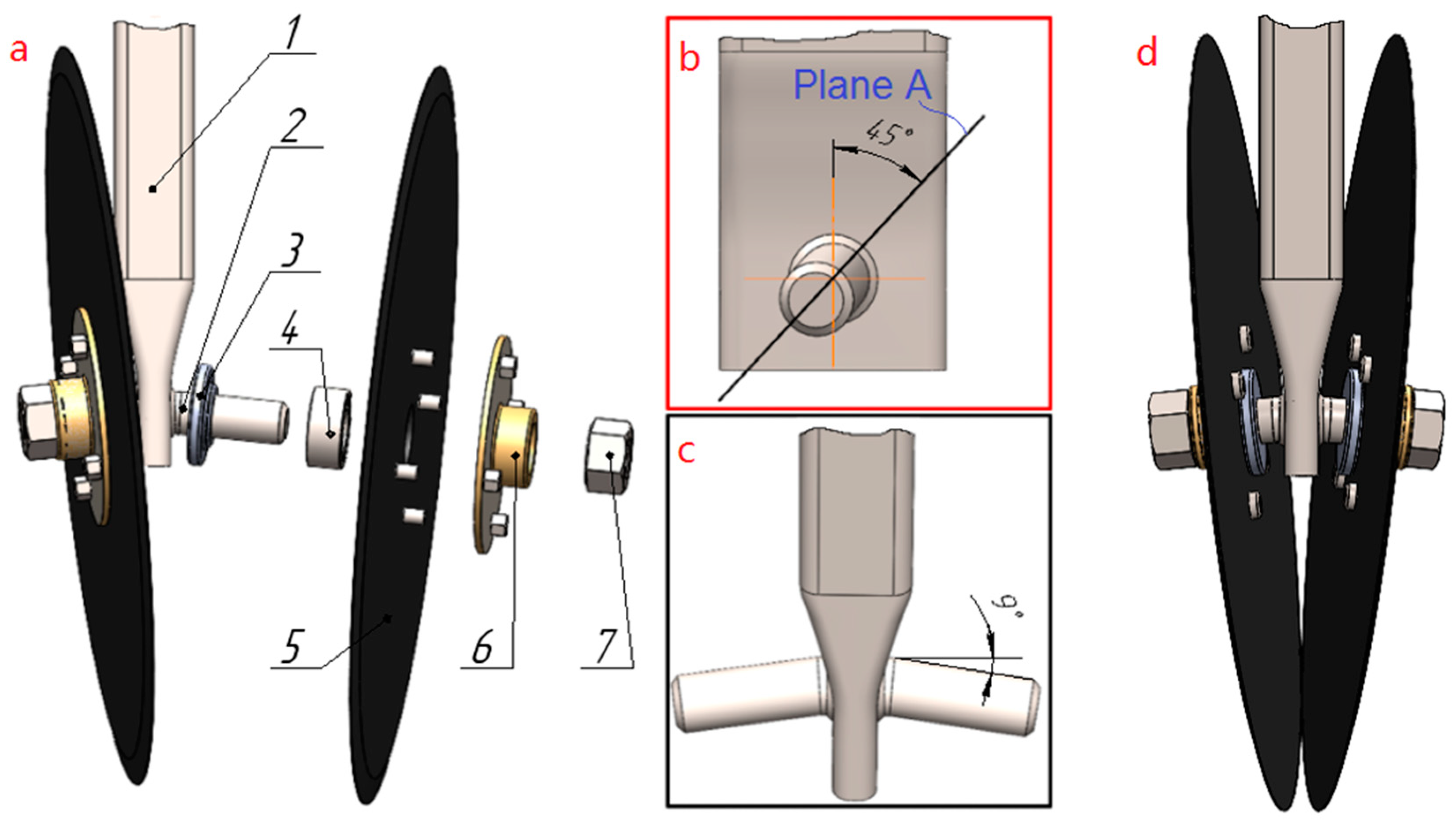
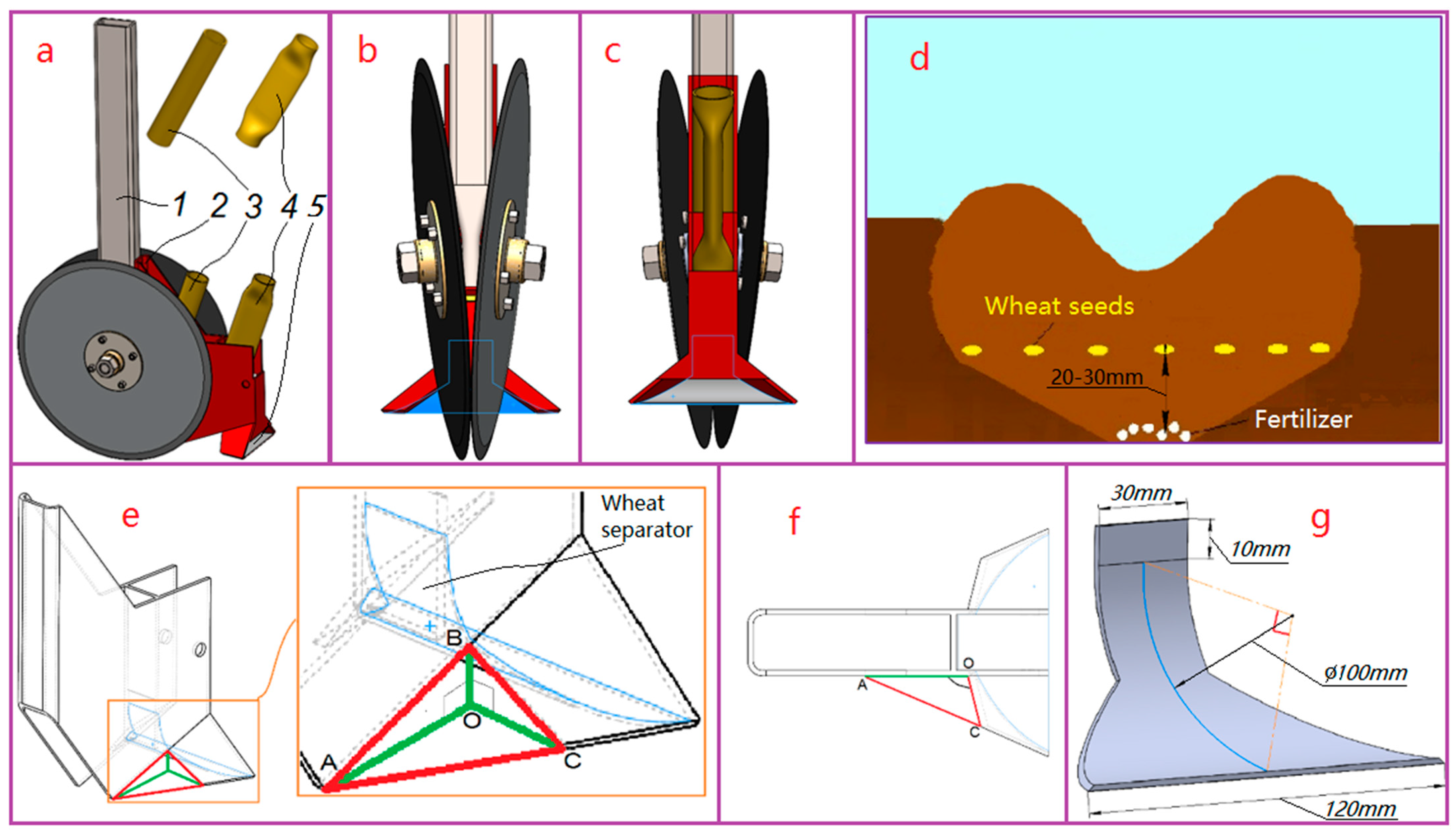
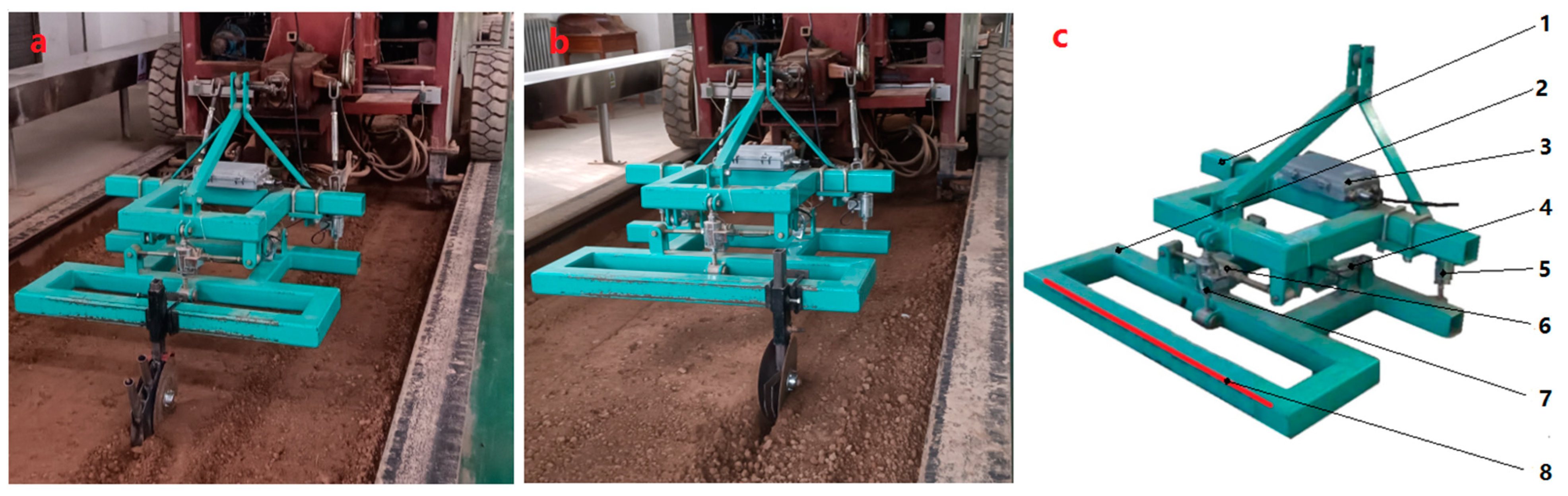
2.1. Design and Parameters of the Base and Designed Disc Colter
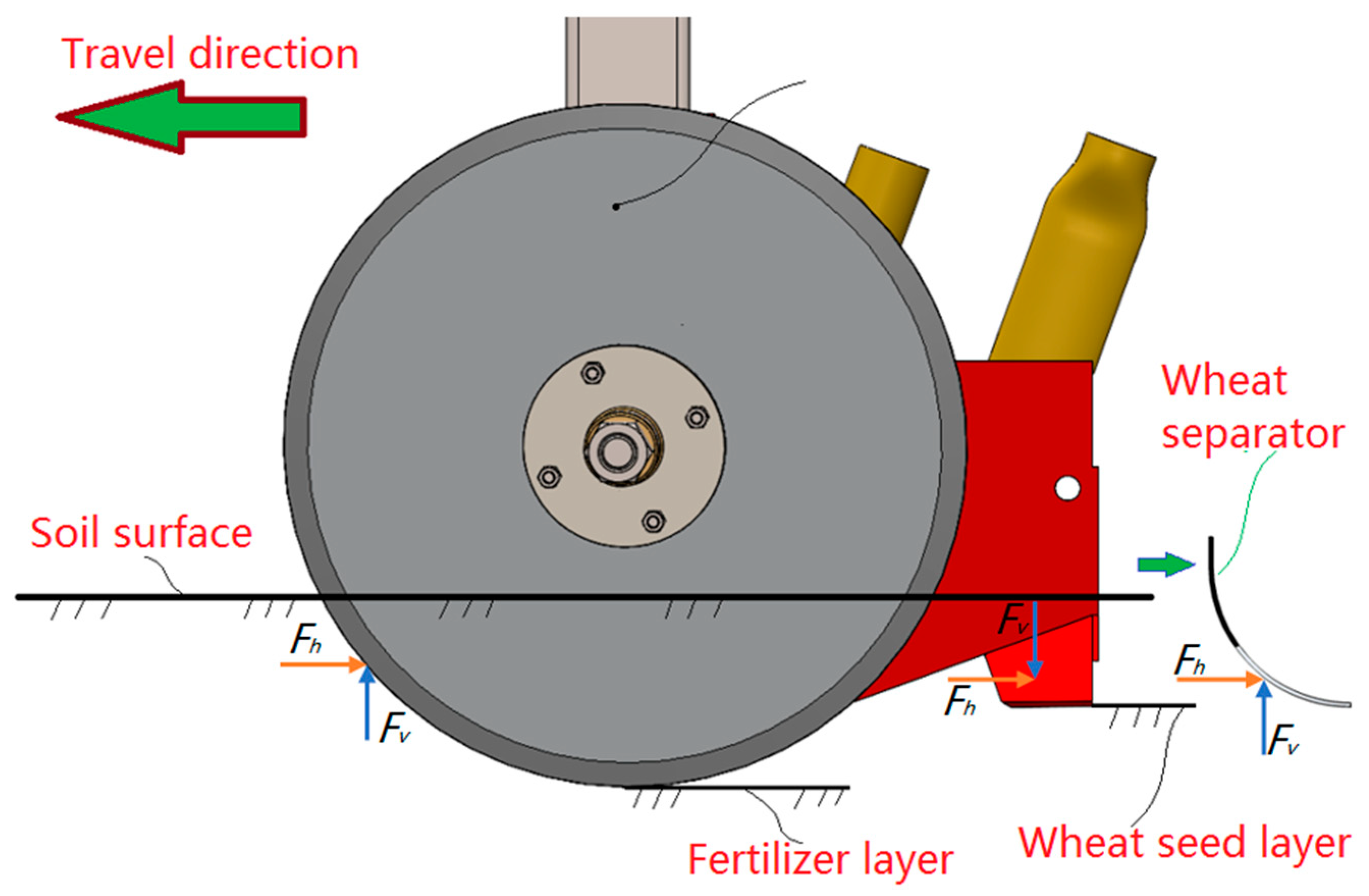
2.2. Analysis of the Vertical and Horizontal Forces Acting on the Designed Double Disc Colter
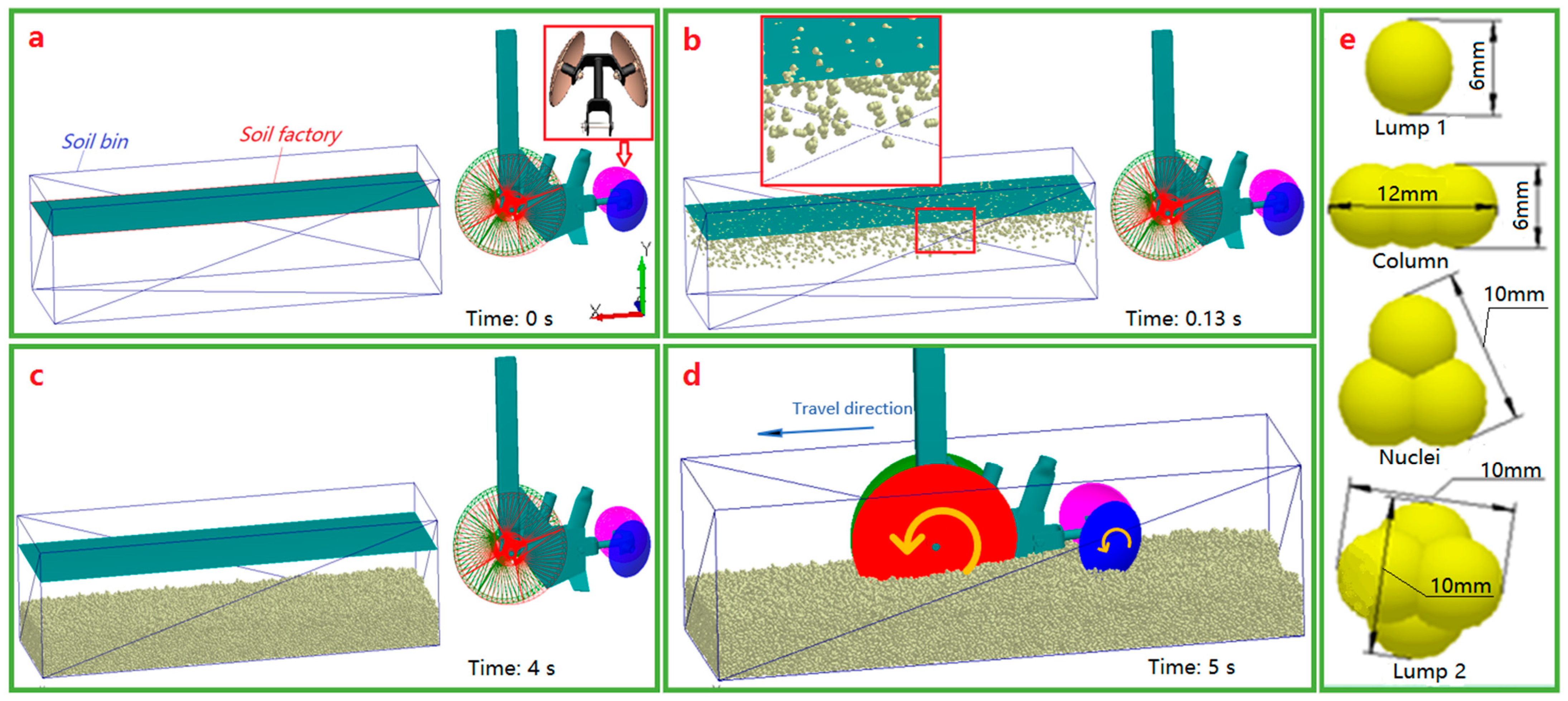
2.3. The Simulation Procedure for the Soil–Soil and Soil–Double Disc Colter Interactions on DEM
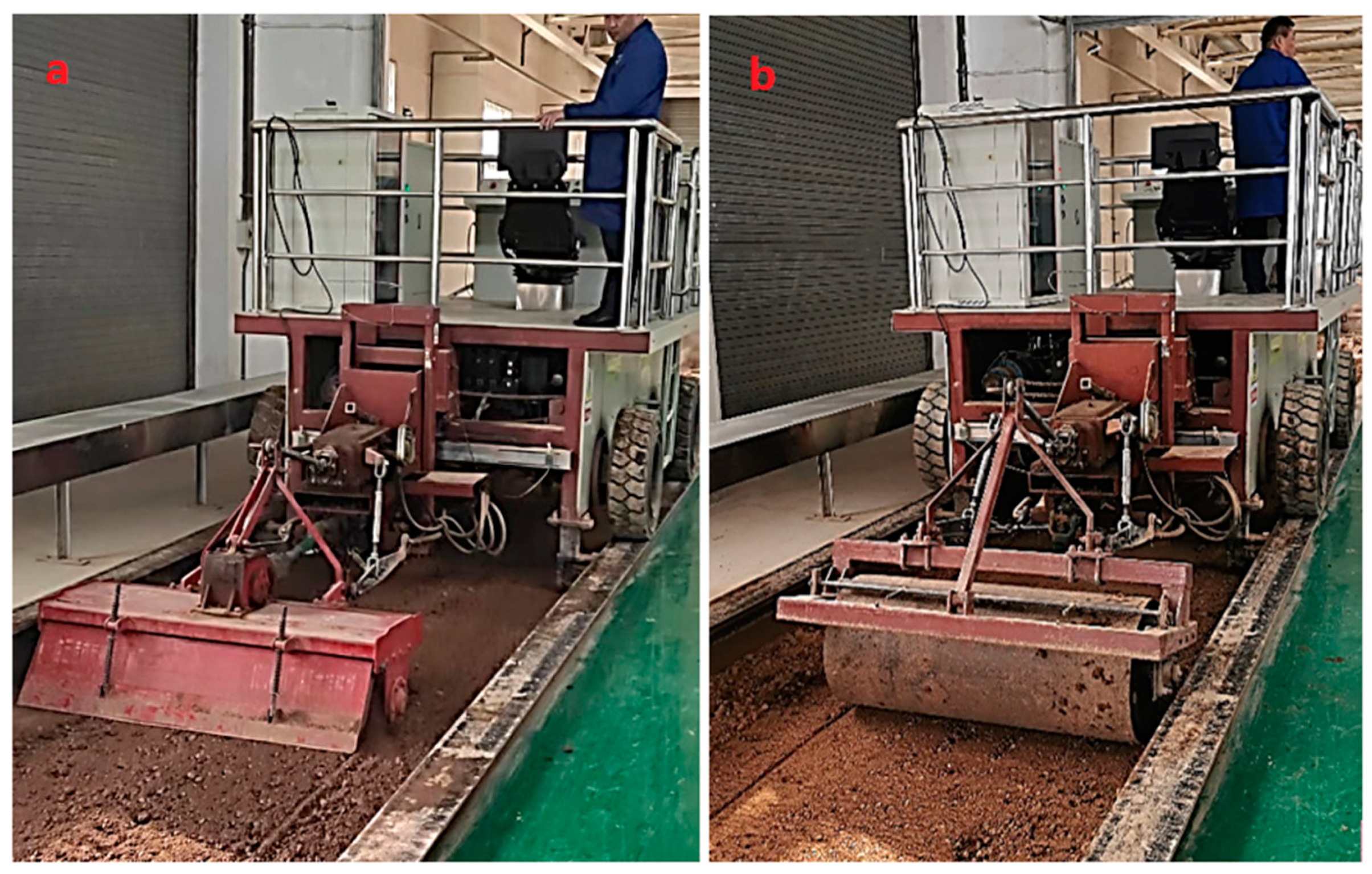
2.4. Preparing the Soil Bin
2.5. Measuring the Horizontal and Vertical Forces of the Double Disc Colter
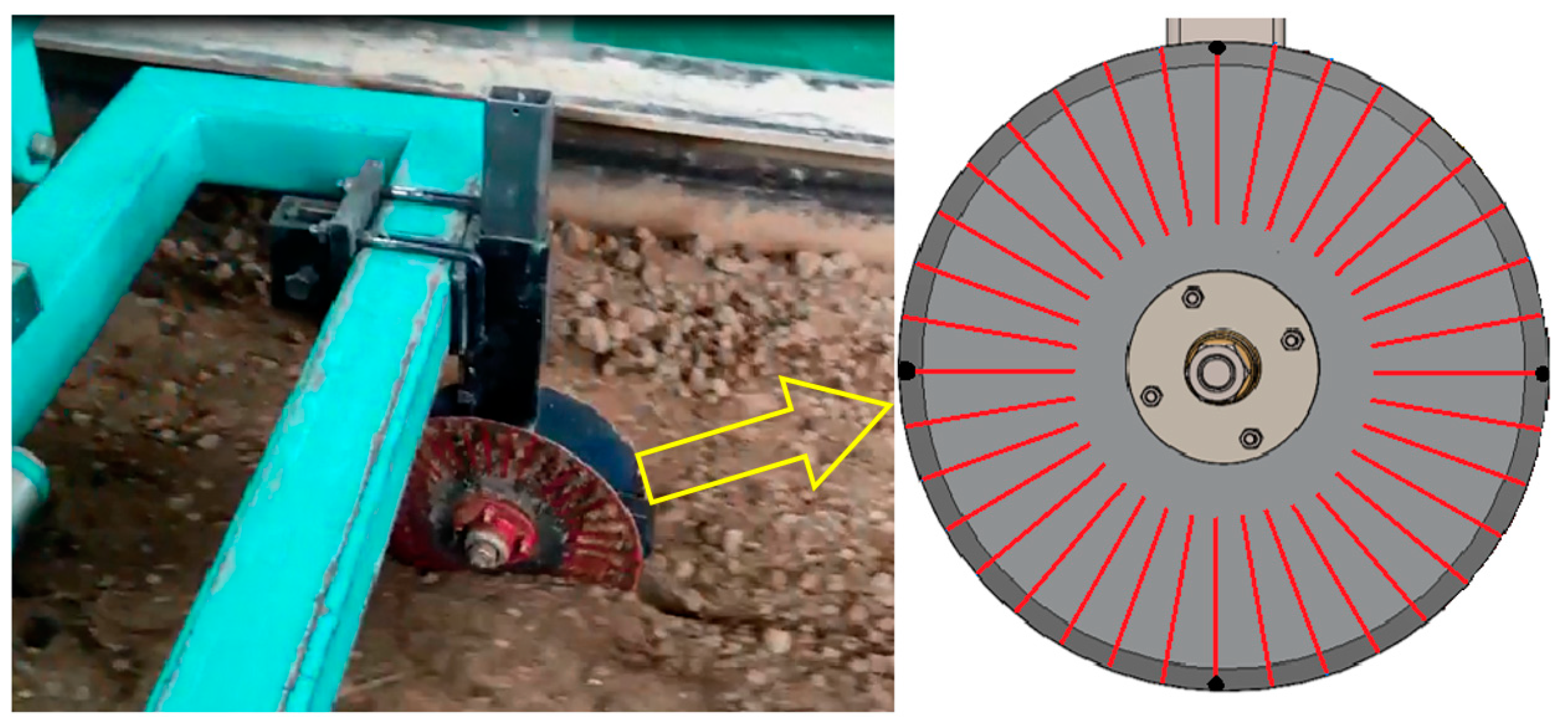
2.6. Determining the Discs’ Free Rotation to Simulate DEM
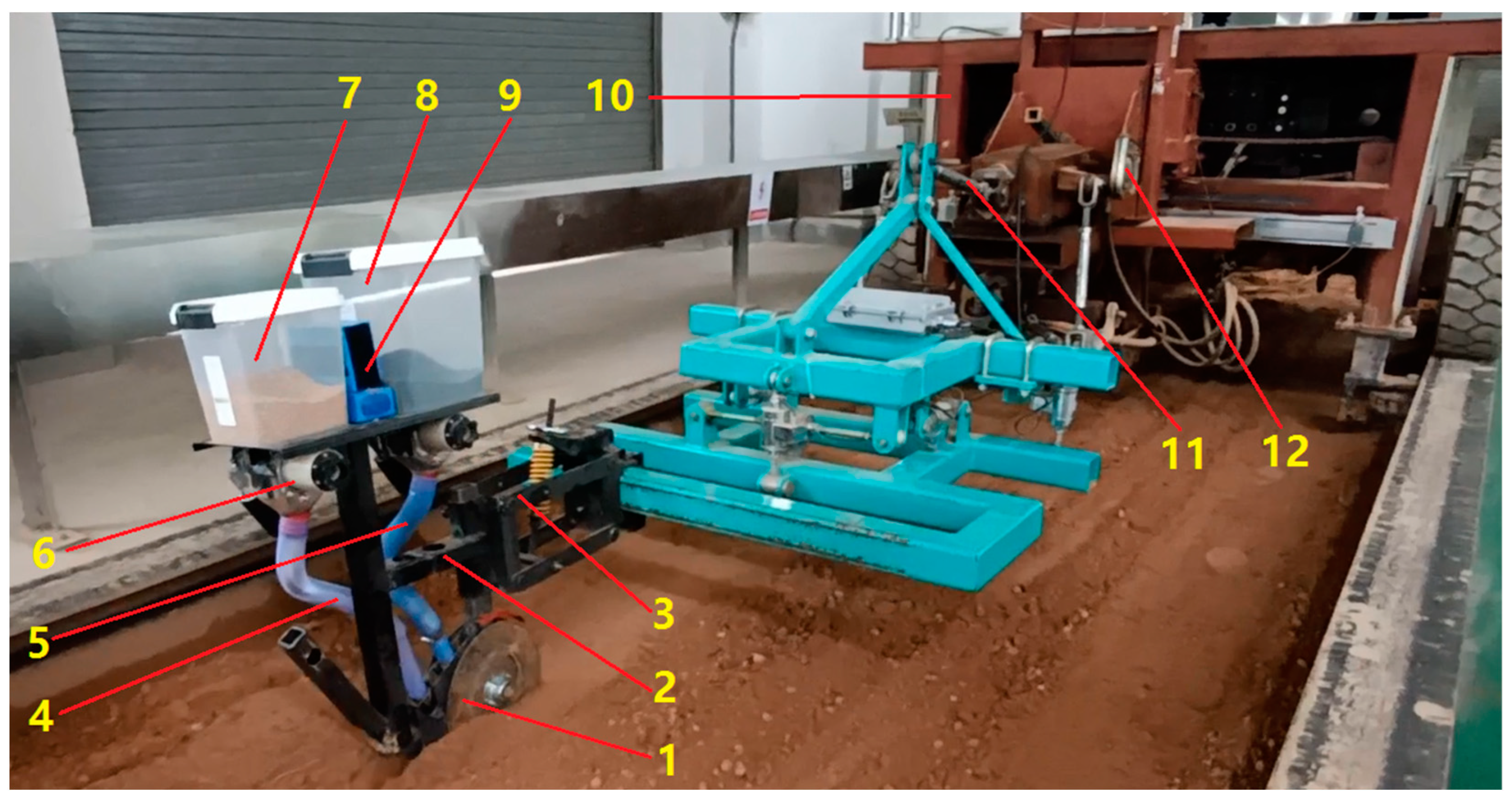
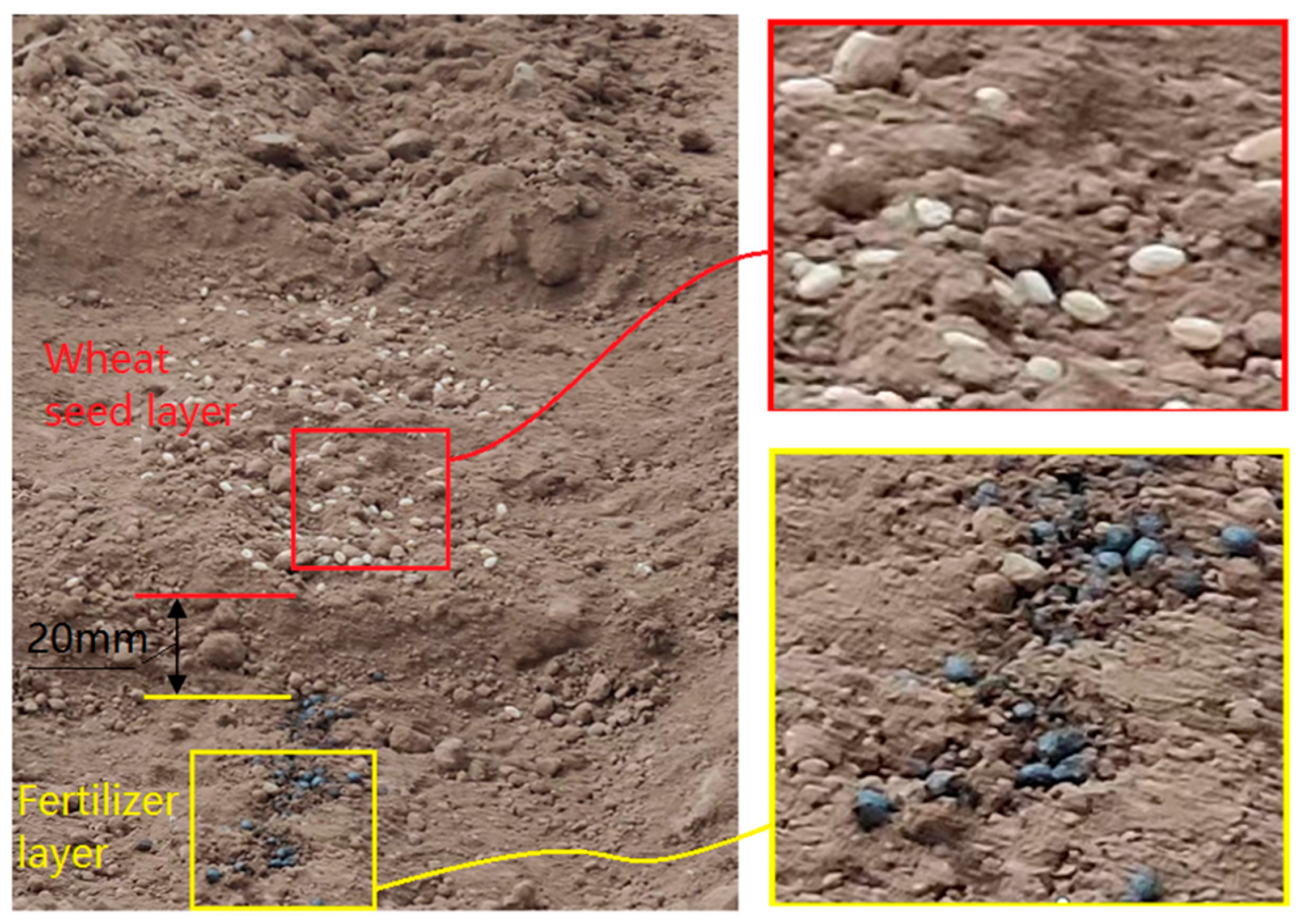
2.7. Determining the Placement of the Wheat Seeds and Granular Fertilizers
3. Results and Discussion
3.1. Results of Placement of the Wheat Seeds and Granular Fertilizers
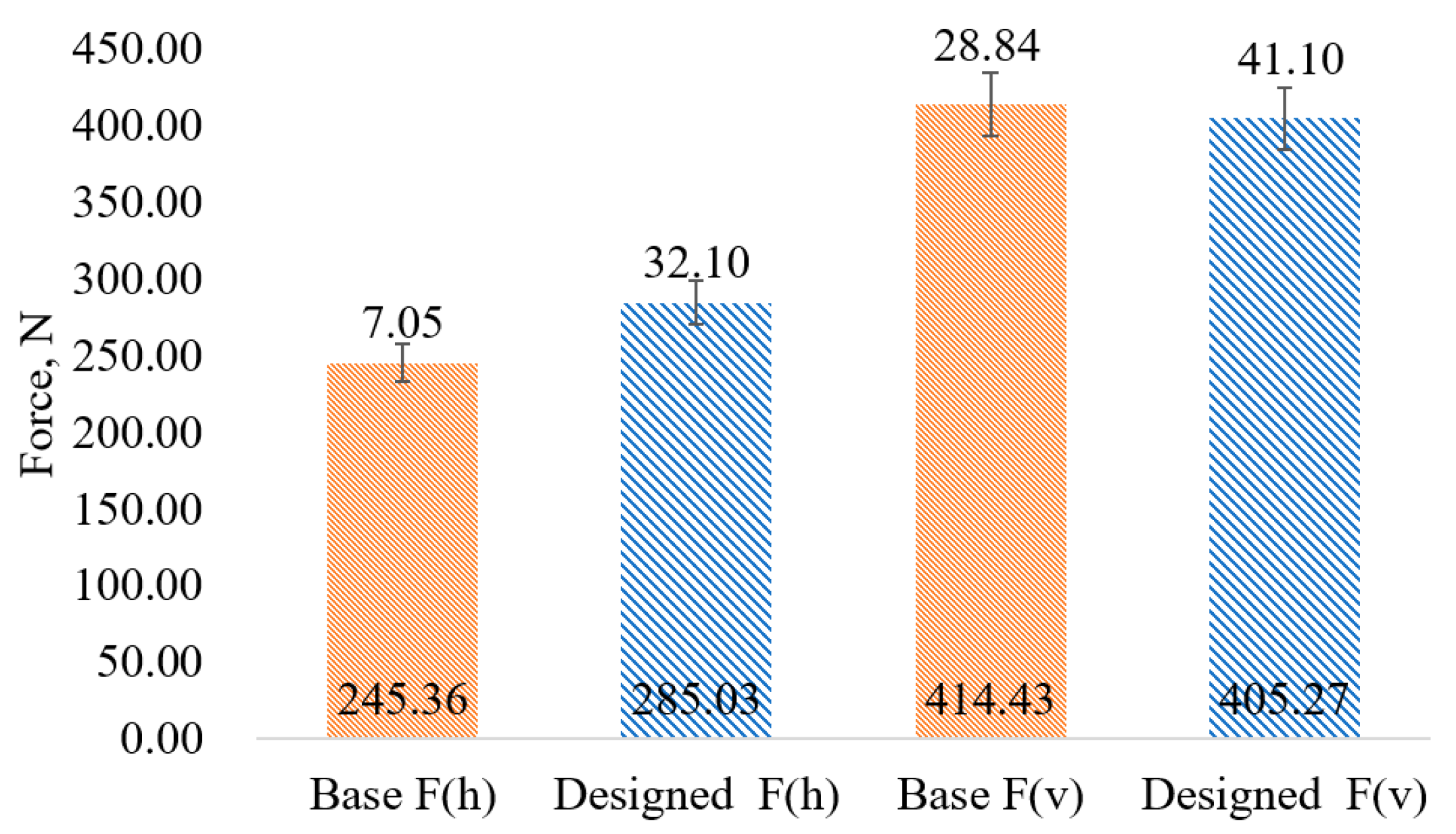
3.2. Results of the Horizontal and Vertical Forces of the Double Disc Colter
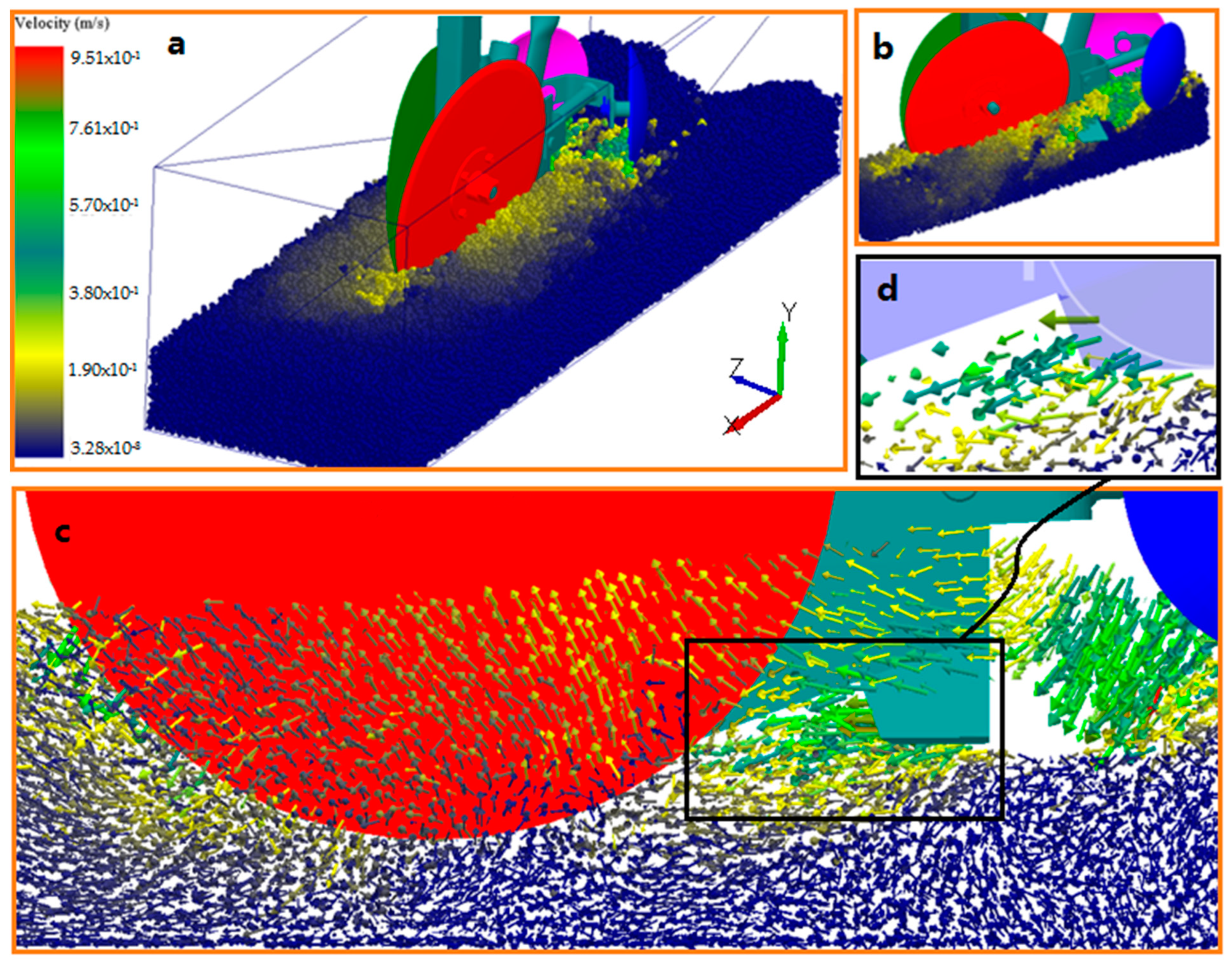
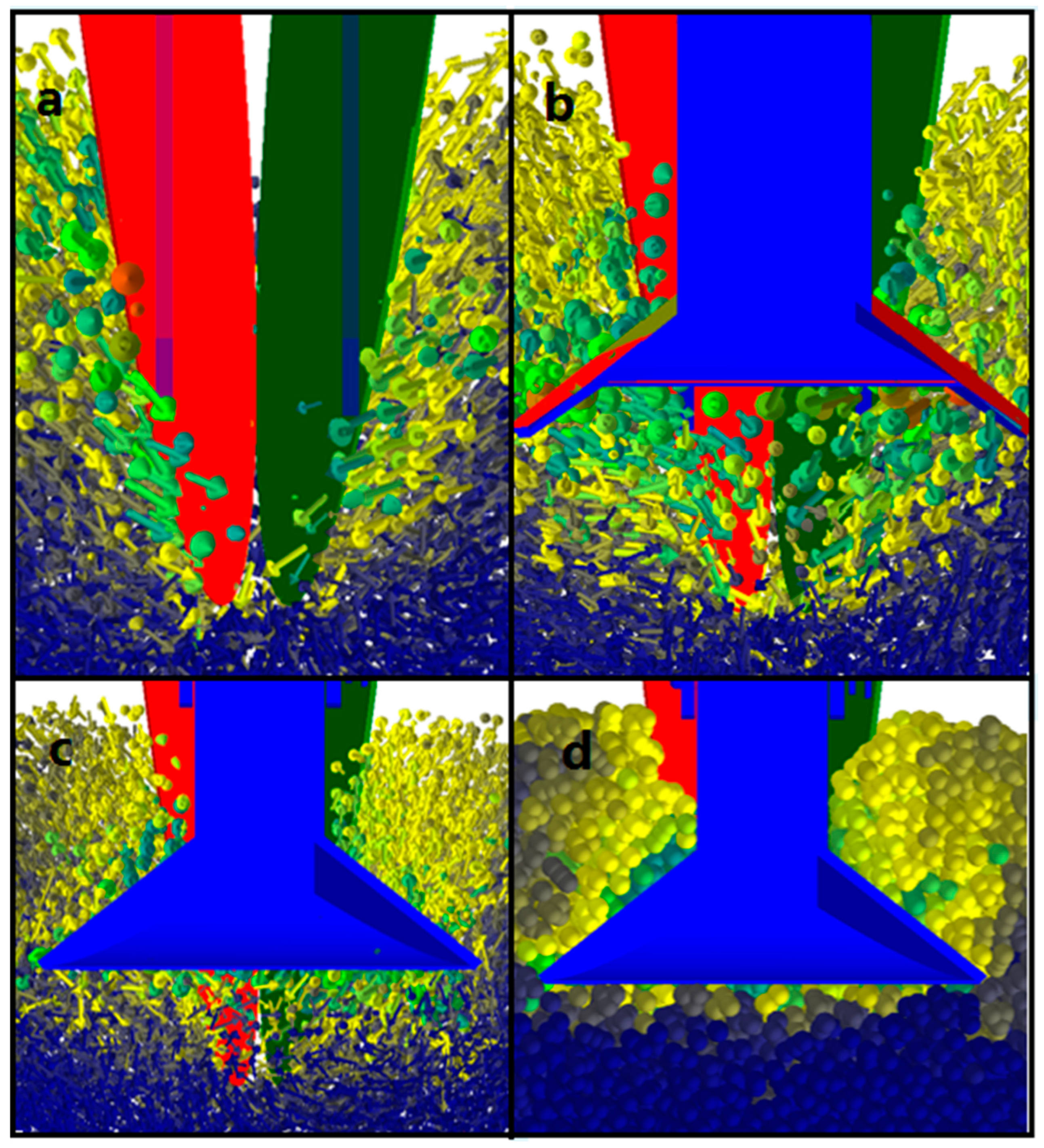
3.3. Simulation Results of the Soil–Soil, and Soil–Designed Double Disc Colter Interactions on DEM
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maraseni, T.; Cockfield, G. Does the adoption of zero tillage reduce greenhouse gas emissions? An assessment for the grains industry in Australia. Agric. Syst. 2011, 104, 451–458. [Google Scholar] [CrossRef]
- Yue, K.; Fornara, D.A.; Heděnec, P.; Wu, Q.; Peng, Y.; Peng, X.; Ni, X.; Wu, F.; Peñuelas, J. No tillage decreases GHG emissions with no crop yield tradeoff at the global scale. Soil Tillage Res. 2023, 228, 105643. [Google Scholar] [CrossRef]
- Hassan, W.; Li, Y.; Saba, T.; Jabbi, F.; Wang, B.; Cai, A.; Wu, J. Improved and sustainable agroecosystem, food security and environmental resilience through zero tillage with emphasis on soils of temperate and subtropical climate regions: A review. Int. Soil Water Conserv. Res. 2022, 10, 530–545. [Google Scholar] [CrossRef]
- Jat, R.K.; Singh, R.G.; Gupta, R.K.; Gill, G.; Chauhan, B.S.; Pooniya, V. Tillage, crop establishment, residue management and herbicide applications for effective weed control in direct seeded rice of eastern Indo–Gangetic Plains of South Asia. Crop Prot. 2019, 123, 12–20. [Google Scholar] [CrossRef]
- Rai, N.; Zhang, Y.; Ram, B.G.; Schumacher, L.; Yellavajjala, R.K.; Bajwa, S.; Sun, X. Deep learning applications in precision weed management: A review. Comput. Electron. Agric. 2023, 206, 107698. [Google Scholar] [CrossRef]
- Su, W.-H. Crop plant signaling for real-time plant identification in smart farm: A systematic review and new concept in artificial intelligence for automated weed control. Artif. Intell. Agric. 2020, 4, 262–271. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Hu, G.; Chen, C.; Chen, J.; Sun, L.; Sugirbay, A.; Chen, Y.; Jin, H.; Zhang, S.; Bu, L. Simplified 4-DOF manipulator for rapid robotic apple harvesting. Comput. Electron. Agric. 2022, 199, 107177. [Google Scholar] [CrossRef]
- Zhao, J.; Sugirbay, A.; Chen, Y.; Zhang, S.; Liu, F.; Bu, L.; Wang, Z.; Chen, J. FEM explicit dynamics simulation and NIR hyperspectral reflectance imaging for determination of impact bruises of Lycium barbarum L. Postharvest Biol. Technol. 2019, 155, 102–110. [Google Scholar] [CrossRef]
- Ahmad, F.; Weimin, D.; Qishou, D.; Rehim, A.; Jabran, K. Comparative Performance of Various Disc-Type Furrow Openers in No-Till Paddy Field Conditions. Sustainability 2017, 9, 1143. [Google Scholar] [CrossRef]
- Portella, J.A.; Capellari, F. Forces on Double Disc Coulters with Different Angles of Attack for a Planter Unit. Sci. Cum Ind. 2018, 6, 7–9. [Google Scholar] [CrossRef]
- Chen, Y.; Cheng, Y.; Chen, J.; Zheng, Z.; Hu, C.; Cao, J. Design and Experiment of the Buckwheat Hill-Drop Planter Hole Forming Device. Agriculture 2021, 11, 1085. [Google Scholar] [CrossRef]
- Francetto, T.R.; Alonço, A.D.S.; Brandelero, C.; Machado, O.D.d.C.; Veit, A.A.; Carpes, D.P. Disturbance of Ultisol soil based on interactions between furrow openers and coulters for the no-tillage system. Span. J. Agric. Res. 2016, 14, e0208. [Google Scholar] [CrossRef]
- Tanbayev, K.; Nukeshev, S.; Sugirbay, A. Performance Evaluation of Tillage Knife Discharge Microchannel. Acta Technol. Agric. 2022, 25, 169–175. [Google Scholar] [CrossRef]
- Chaudhuri, D. PM—Power and Machinery: Performance Evaluation of Various Types of Furrow Openers on Seed Drills—A Review. J. Agric. Eng. Res. 2001, 79, 125–137. [Google Scholar] [CrossRef]
- Fallahi, S.; Raoufat, M. Row-crop planter attachments in a conservation tillage system: A comparative study. Soil Tillage Res. 2008, 98, 27–34. [Google Scholar] [CrossRef]
- Aikins, K.A.; Antille, D.L.; Jensen, T.A.; Blackwell, J. Performance comparison of residue management units of no-tillage sowing systems: A review. Eng. Agric. Environ. Food 2019, 12, 181–190. [Google Scholar] [CrossRef]
- Raoufat, M.; Matbooei, A. Row cleaners enhance reduced tillage planting of corn in Iran. Soil Tillage Res. 2007, 93, 152–161. [Google Scholar] [CrossRef]
- Altikat, S.; Celik, A. Effects of different no-till seeders and tractor forward speed on the soil physical properties and seed emergence of summer vetch and winter wheat. J. Agric. Sci. 2012, 18, 21–30. [Google Scholar]
- Wen, D.; Xu, H.; Xie, L.; He, M.; Hou, H.; Wu, C.; Li, Y.; Zhang, C. Effects of Nitrogen Level during Seed Production on Wheat Seed Vigor and Seedling Establishment at the Transcriptome Level. Int. J. Mol. Sci. 2018, 19, 3417. [Google Scholar] [CrossRef]
- Fujii, T.; Hasegawa, H.; Ohyama, T.; Sinegovskaya, V.T. Evaluation of tillage efficiency and power requirements for a deep-placement fertilizer applicator with reverse rotational rotary. Russ. Agric. Sci. 2015, 41, 498–503. [Google Scholar] [CrossRef]
- Danilov, A.A.; Gogolev, V.L.; Shaihov, M.K. Рабoчий Орган Сеялки Зернoтукoвoй Стерневoй (Working Body of the Grain-Fertilizer Stubble Seeder); Federal Service for Intellectual Property Patents and Trademarks of the Russian Federation: Moscow, Russia, 2006.
- Blackshaw, R.E.; Larney, F.; Lindwall, C.W.; Watson, P.R.; Derksen, D.A. Tillage intensity and crop rotation affect weed community dynamics in a winter wheat cropping system. Can. J. Plant Sci. 2001, 81, 805–813. [Google Scholar] [CrossRef]
- Santín-Montanyá, M.; Martín-Lammerding, D.; Zambrana, E.; Tenorio, J.L. Management of weed emergence and weed seed bank in response to different tillage, cropping systems and selected soil properties. Soil Tillage Res. 2016, 161, 38–46. [Google Scholar] [CrossRef]
- Altikat, S.; Celik, A.; Gozubuyuk, Z. Effects of various no-till seeders and stubble conditions on sowing performance and seed emergence of common vetch. Soil Tillage Res. 2013, 126, 72–77. [Google Scholar] [CrossRef]
- Knochel, D.G.; Flagg, C.; Seastedt, T. Effects of plant competition, seed predation, and nutrient limitation on seedling survivorship of spotted knapweed (Centaurea stoebe). Biol. Invasions 2010, 12, 3771–3784. [Google Scholar] [CrossRef]
- Xi, X.; Gu, C.; Shi, Y.; Zhao, Y.; Zhang, Y.; Zhang, Q.; Jin, Y.; Zhang, R. Design and experiment of no-tube seeder for wheat sowing. Soil Tillage Res. 2020, 204, 104724. [Google Scholar] [CrossRef]
- Gillet, F. Plant Competition. In Encyclopedia of Ecology; Jørgensen, S.E., Fath, B.D., Eds.; Academic Press: Oxford, UK, 2008; pp. 2783–2793. [Google Scholar]
- Wang, B.; Gu, F.; Hu, Z.; Wu, F.; Chen, X.; Luo, W. Analysis and Evaluation of Influencing Factors on Uniform Sowing of Wheat with Wide Seed Belt after Sowing and Soil Throwing Device. Agriculture 2022, 12, 1455. [Google Scholar] [CrossRef]
- Ebrahim, I. The soil bed preparation to drill rice in band sowing method. J. Agric. Sci. Mansoura Univ. 2002, 27, 2545–2552. [Google Scholar]
- Nukeshev, S.O.; Kakabaev, N.A.; Romanyuk, N.N.; Troyanovskaya, I.P.; Smelik, V.A.; Voinash, S.A. Design and rationale for parametres of the seed-fertilizer seeder coulter for subsoil broadcast seeding. IOP Conf. Ser. Earth Environ. Sci. 2021, 677, 052010. [Google Scholar] [CrossRef]
- Nukeshev, S.; Slavov, V.; Kakabayev, N.; Amantayev, M. Mathematical Modelling in 3D of Opener with Scatterer of the Grain-Fertilizer Seeder. Mechanika 2019, 24, 840–844. [Google Scholar] [CrossRef]
- Olsen, J.M.; Griepentrog, H.W.; Nielsen, J.; Weiner, J. How Important are Crop Spatial Pattern and Density for Weed Suppression by Spring Wheat? Weed Sci. 2012, 60, 501–509. [Google Scholar] [CrossRef]
- Haliniarz, M.; Kapeluszny, J. Assessment of the effect of sowing density on weed infestation and yields of three spring wheat cultivars. Acta Sci. Polonorum. Agric. 2022, 11, 13–25. [Google Scholar]
- Nukeshev, S.; Eskhozhin, K.; Karaivanov, D.; Sankibaev, T.; Kakabayev, N. Theoretical and experimental substantiation of the design of an opener for intrasoil broadcast sowing of grain crops. Bulg. J. Agric. Sci. 2016, 22, 862–868. [Google Scholar]
- Kem, A.S.; Shevchenko, A.P.; Evchenko, A.V. Movement of seeds in the underweep space of drill coulter in the condition of pneumatic feed. IOP Conf. Ser. Earth Environ. Sci. 2021, 624, 012069. [Google Scholar] [CrossRef]
- Odey, S.; Manuwa, S. Design steps of narrow tillage tools for draught reduction and increased soil disruption-a review. Agricultural Engineering International. CIGR E-J. 2016, 18, 91–102. [Google Scholar]
- Rustembayev, A.; Eskhozhin, D.; Nukeshev, S.; Zhaksylykova, Z.; Eskhozhin, K. The theoretical rationale for traction effort experienced working part of the cultivator fertilizer. Int. J. Mech. Eng. Technol. 2019, 10, 424–433. [Google Scholar]
- Gumarov, G.S.; Konovalov, V.V.; Sarsenov, A.E.; Kubasheva, Z.K.; Rakhimov, A.A. Mathematical modelling of traction resistance of the improved opener of grain seeder. BIO Web Conf. 2020, 17, 00044. [Google Scholar] [CrossRef]
- Kokoshin, S.N.; Kirgintsev, B.O.; Tashlanov, V.I. Disc seeder with auto tracking system depth of sowing seeds. J. Phys. Conf. Ser. 2020, 1614, 012051. [Google Scholar] [CrossRef]
- Gheres, M.; Tutunaru, L.F.; Ferenc, G.; Deac, T. Optimization of geometric parameters of scarificators for the reduction of the soil—Tool interaction forces. In Proceedings of the International Symposium, ISB-INMA TEH’2019, Agricultural and Mechanical Engineering, Bucharest, Romania, 31 October–1 November 2019. [Google Scholar]
- Gheres, M.; Constantin, C. Mathematical Model for Determination of Soil Tillage Resistance Forces. In Proceedings of the International Symposium, ISB-INMA TEH’2018, Agricultural and Mechanical Engineering, Bucharest, Romania, 1–3 November 2018; pp. 229–238. [Google Scholar]
- He, C.; Guo, Y.; Guo, X.; Sang, H. A mathematical model for predicting the draft force of shank-type tillage tine in a compacted sandy loam. Soil Tillage Res. 2023, 228, 105642. [Google Scholar] [CrossRef]
- Godwin, R.; Spoor, G. Soil failure with narrow tines. J. Agric. Eng. Res. 1977, 22, 213–228. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling soil–claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Geng, Y.; Wang, X.; Zhong, X.; Zhang, X.; Chen, K.; Wei, Z.; Lu, Q.; Cheng, X.; Wei, M. Design and Optimization of a Soil-Covering Device for a Corn No-Till Planter. Agriculture 2022, 12, 1218. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, Y.; Sadek, M.A. Modelling soil–seed contact using the Discrete Element Method (DEM). Biosyst. Eng. 2014, 121, 56–66. [Google Scholar] [CrossRef]
- Hang, C.; Gao, X.; Yuan, M.; Huang, Y.; Zhu, R. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Bo, L.; Fanyi, L.; Junying, M.; Jun, C.; Wenting, H. Distinct element method analysis and field experiment of soil resistance applied on the subsoiler. Int. J. Agric. Biol. Eng. 2014, 7, 54–59. [Google Scholar]
- Sugirbay, A.; Hu, G.R.; Chen, J.; Mustafin, Z.; Muratkhan, M.; Iskakov, R.; Mukhamed, B. A Study on the Calibration of Wheat Seed Interaction Properties Based on the Discrete Element Method. Agriculture 2022, 12, 1497. [Google Scholar] [CrossRef]
- Patwa, A.; Ambrose, R.K.; Casada, M. Discrete element method as an approach to model the wheat milling process. Powder Technol. 2016, 302, 350–356. [Google Scholar] [CrossRef]
- Adilet, S.; Zhao, J.; Sayakhat, N.; Chen, J.; Nikolay, Z.; Bu, L.; Sugirbayeva, Z.; Hu, G.; Marat, M.; Wang, Z. Calibration Strategy to Determine the Interaction Properties of Fertilizer Particles Using Two Laboratory Tests and DEM. Agriculture 2021, 11, 592. [Google Scholar] [CrossRef]
- Huang, Y.; Hang, C.; Yuan, M.; Wang, B.; Zhu, R. Discrete element simulation and experiment on disturbance behavior of subsoiling. Trans. Chin. Soc. Agric. Mach. 2016, 47, 70–78. [Google Scholar]
- Gnusov, M.A.; Lysych, M.N.; Druchinin, D.Y. Volumetric dynamometer units for laboratory and field testing of tillage equipment. J. Phys. Conf. Ser. 2021, 1889, 052047. [Google Scholar] [CrossRef]
- Odey, S.O.; Manuwa, S.I.; Ewetumo, T. Instrumentation Assembly for Measuring Draughts of Subsoilers in Outdoor Soil Bin Facility. Int. J. Res. Eng. Sci. 2018, 6, 1–10. [Google Scholar]
- Roca, J.; Comellas, M.; Pijuan, J.; Nogués, M. Development of an easily adaptable three-point hitch dynamometer for agricultural tractors. Analysis of the disruptive effects on the measurements. Soil Tillage Res. 2019, 194, 104323. [Google Scholar] [CrossRef]
- Sadek, M.A.; Chen, Y.; Zeng, Z. Draft force prediction for a high-speed disc implement using discrete element modelling. Biosyst. Eng. 2021, 202, 133–141. [Google Scholar] [CrossRef]
- McLaughlin, N.B.; Campbell, A.J.; Owen, G.T. Performance of hoe and triple disc furrow openers on no-till grain drills in a fine sandy loam soil. Soil Tillage Res. 2019, 195, 104373. [Google Scholar] [CrossRef]
- Barr, J.B.; Desbiolles, J.M.; Fielke, J.M.; Ucgul, M. Development and field evaluation of a high-speed no–till seeding system. Soil Tillage Res. 2019, 194, 104337. [Google Scholar] [CrossRef]
- Akimov, A.; Konstantinov, Y.; Medvedev, V.; Mishin, P.; Volkhonov, M.; Lekomtsev, P.; Obolensky, N.; Yunusov, G. An approximating mathematical model of interaction between a freely rotating disk and soil. East. Eur. J. Enterp. Technol. 2018, 6, 17–27. [Google Scholar] [CrossRef]
- Nalavade, P.P.; Salokhe, V.M.; Niyamapa, T.; Soni, P. Performance of Free Rolling and Powered Tillage Discs. Soil Tillage Res. 2010, 109, 87–93. [Google Scholar] [CrossRef]
- Nalavade, P.P.; Soni, P.; Salokhe, V.; Niyamapa, T. Comparative Performance of Standard, Notched and Spiral-notched Tillage Discs. Int. Agric. Eng. J. 2011, 20, 18–26. [Google Scholar]
- Sugirbay, A.; Zhao, J.; Nukeshev, S.; Chen, J. Determination of pin-roller parameters and evaluation of the uniformity of granular fertilizer application metering devices in precision farming. Comput. Electron. Agric. 2020, 179, 105835. [Google Scholar] [CrossRef]
- Adilet, S.; Zhao, K.; Liu, G.; Sayakhat, N.; Jun, C.; Hu, G.; Bu, L.; Chen, Y.; Jin, H.; Zhang, S.; et al. Investigation of the pin-roller metering device and tube effect for wheat seeds and granular fertilizers based on DEM. Int. J. Agric. Biol. Eng. 2023, 16, 103–114. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Property | Value | Related Investigations |
|---|---|---|
| Soil density (kg m−3) | 1346 | [49] |
| Poisson’s ratio of the soil aggregates | 0.4 | |
| Shear modulus of the soil aggregates, (Pa) | 1 × 106 | |
| Soil-soil restitution coefficient | 0.2 | |
| Soil-steel restitution coefficient | 0.3 | |
| The soil-soil static friction coefficient | 0.4 | |
| The soil-soil rolling friction coefficient | 0.3 | |
| The soil-steel static friction coefficient | 0.5 | |
| The soil-steel rolling friction coefficient | 0.05 | |
| Steel density, (kg m−3) | 7850 | [12,49,50,51,52,53] |
| Poisson’s ratio of steel | 0.3 | |
| Shear modulus of steel, (Pa) | 8.23 × 1010 |
| Input Property | Value |
|---|---|
| Normal stiffness per unit area (N m−1) | 2,400,000 |
| Shear stiffness per unit area (N m−1) | 1,700,000 |
| Critical normal stress (Pa) | 235,000 |
| Critical shear stress (Pa) | 186,000 |
| Start time (s) | 4 |
| Bonded disc radius (mm) | 3.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sugirbay, A.; Zhao, K.; Liu, G.; Hu, G.; Chen, J.; Mustafin, Z.; Iskakov, R.; Kakabayev, N.; Muratkhan, M.; Khan, V.; et al. Double Disc Colter for a Zero-Till Seeder Simultaneously Applying Granular Fertilizers and Wheat Seeds. Agriculture 2023, 13, 1102. https://doi.org/10.3390/agriculture13051102
Sugirbay A, Zhao K, Liu G, Hu G, Chen J, Mustafin Z, Iskakov R, Kakabayev N, Muratkhan M, Khan V, et al. Double Disc Colter for a Zero-Till Seeder Simultaneously Applying Granular Fertilizers and Wheat Seeds. Agriculture. 2023; 13(5):1102. https://doi.org/10.3390/agriculture13051102
Chicago/Turabian StyleSugirbay, Adilet, Kaiyuan Zhao, Guangyao Liu, Guangrui Hu, Jun Chen, Zhasulan Mustafin, Ruslan Iskakov, Nurbol Kakabayev, Marat Muratkhan, Valery Khan, and et al. 2023. "Double Disc Colter for a Zero-Till Seeder Simultaneously Applying Granular Fertilizers and Wheat Seeds" Agriculture 13, no. 5: 1102. https://doi.org/10.3390/agriculture13051102