
Greenhouse Tomato Picking Robot Chassis

Abstract
:1. Introduction
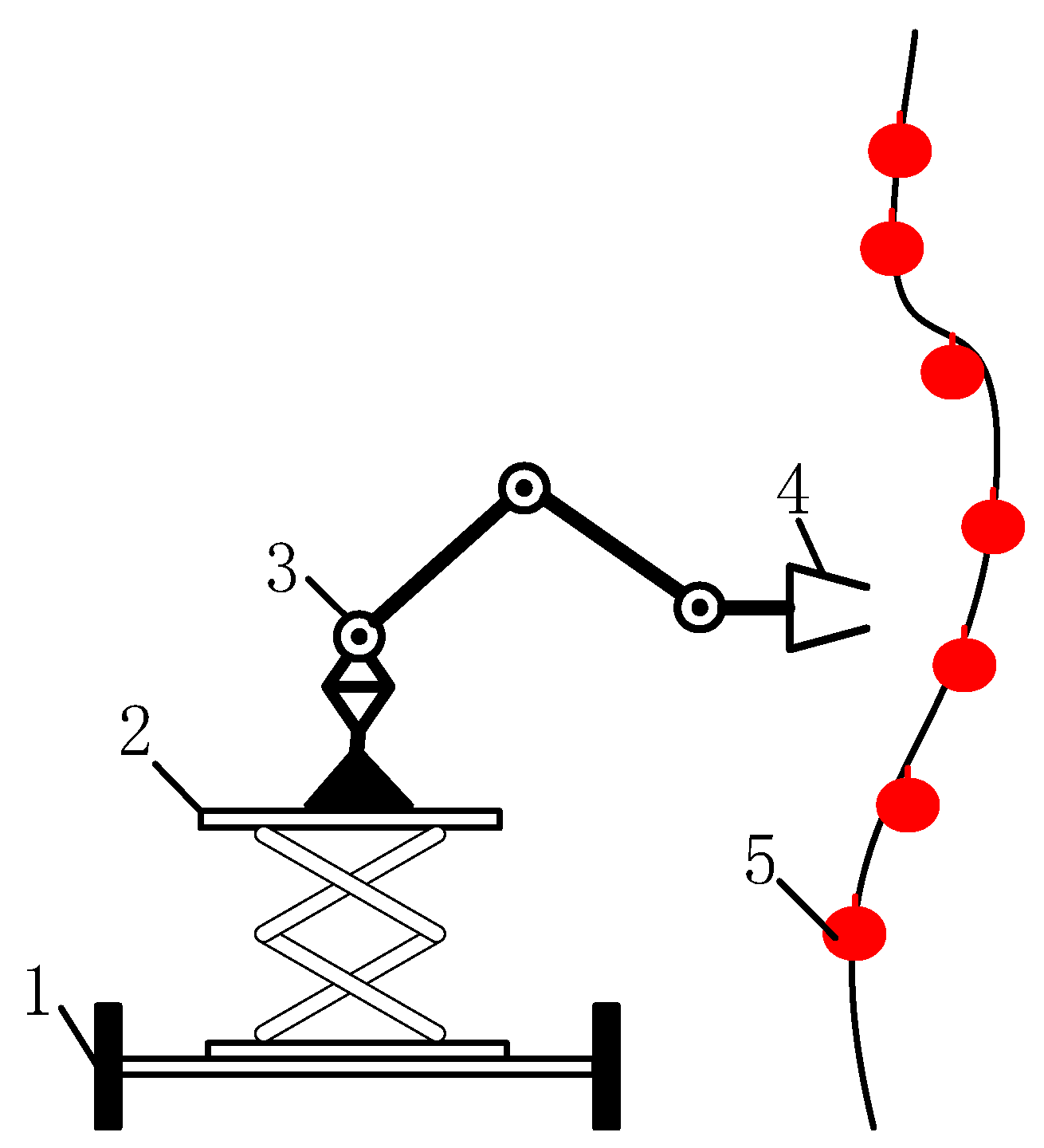
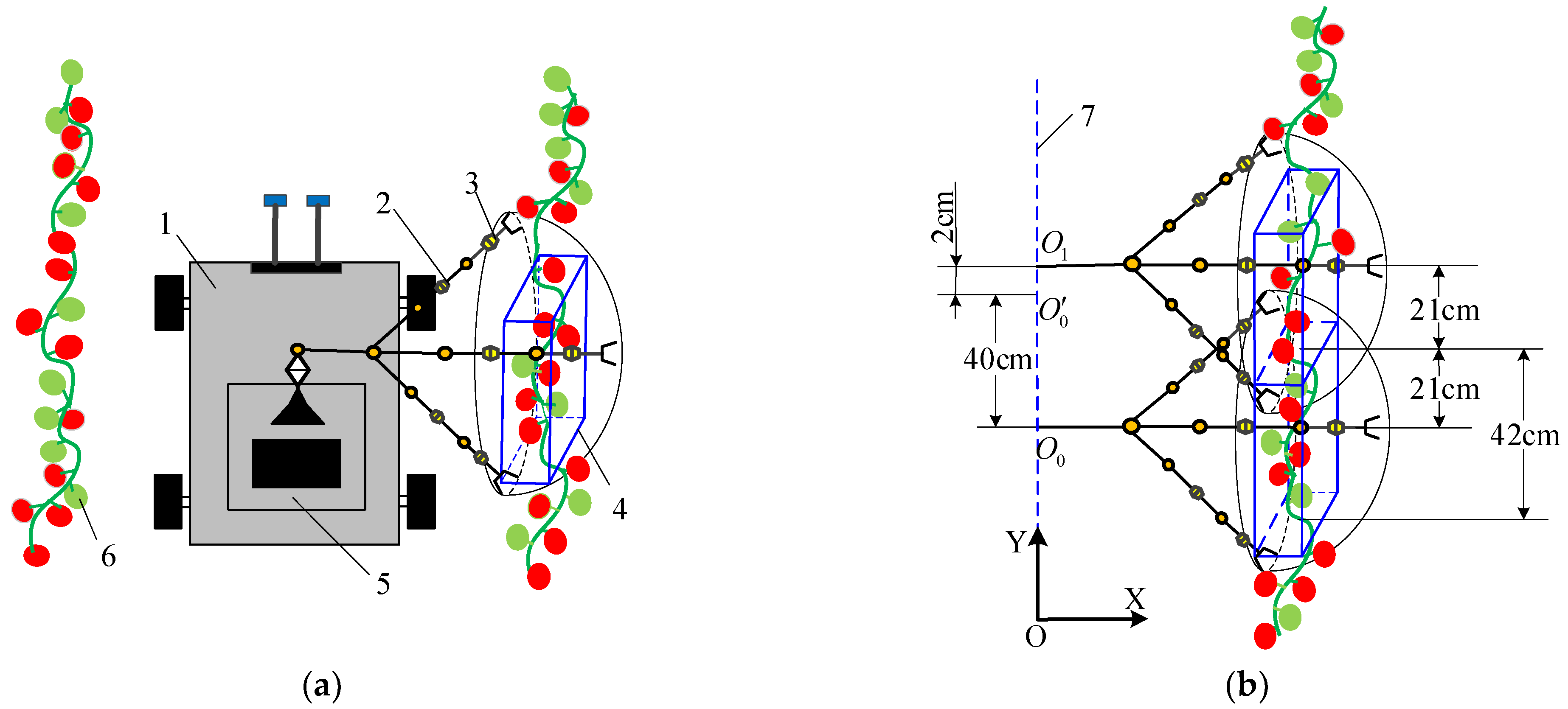
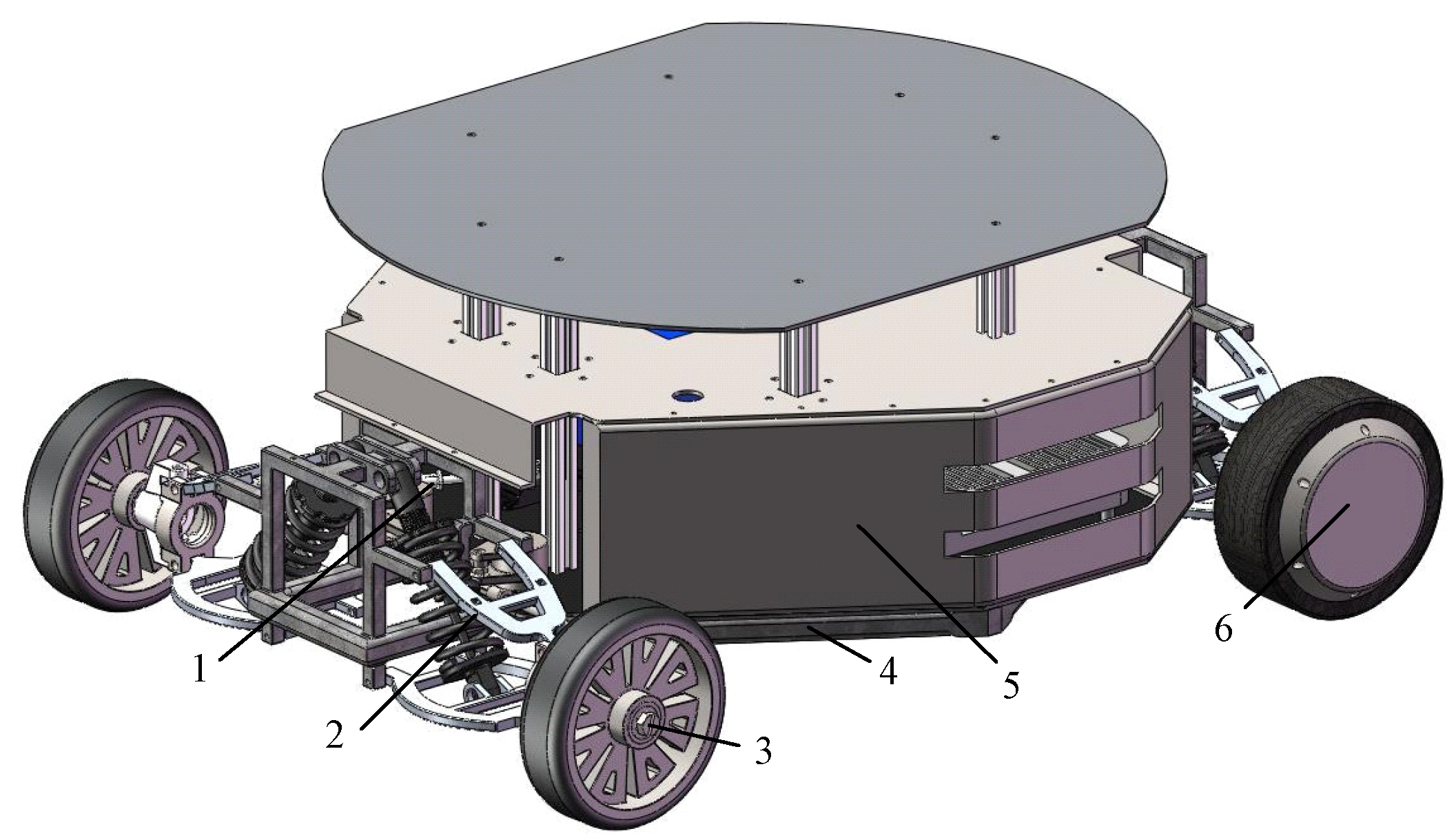
2. Movement Mechanism of the Greenhouse Tomato Picking Robot Chassis
- The deviation of the robot in the X-direction must not exceed 10 cm when the robot moves straight along a single 320 cm-long ridge track.
- When the robot turns, the deviation in the direction perpendicular to the turn trajectory must not exceed 10 cm.
- When the robot stops every 40 cm, the deviation in the X-direction must not exceed 10 cm, and the positioning deviation in the Y-direction must not exceed 2 cm.
- The robot must be capable of carrying a weight of approximately 200 kg.
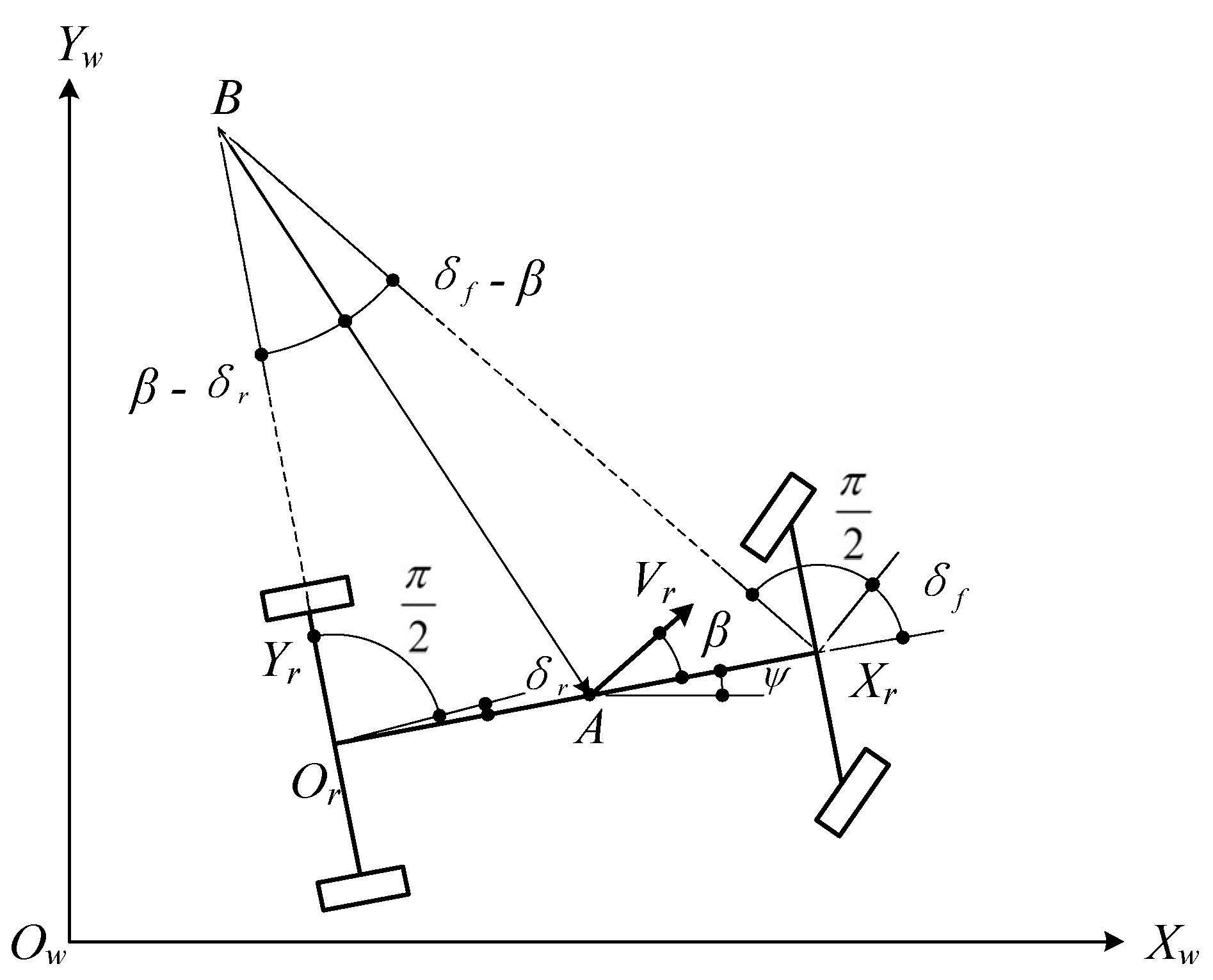
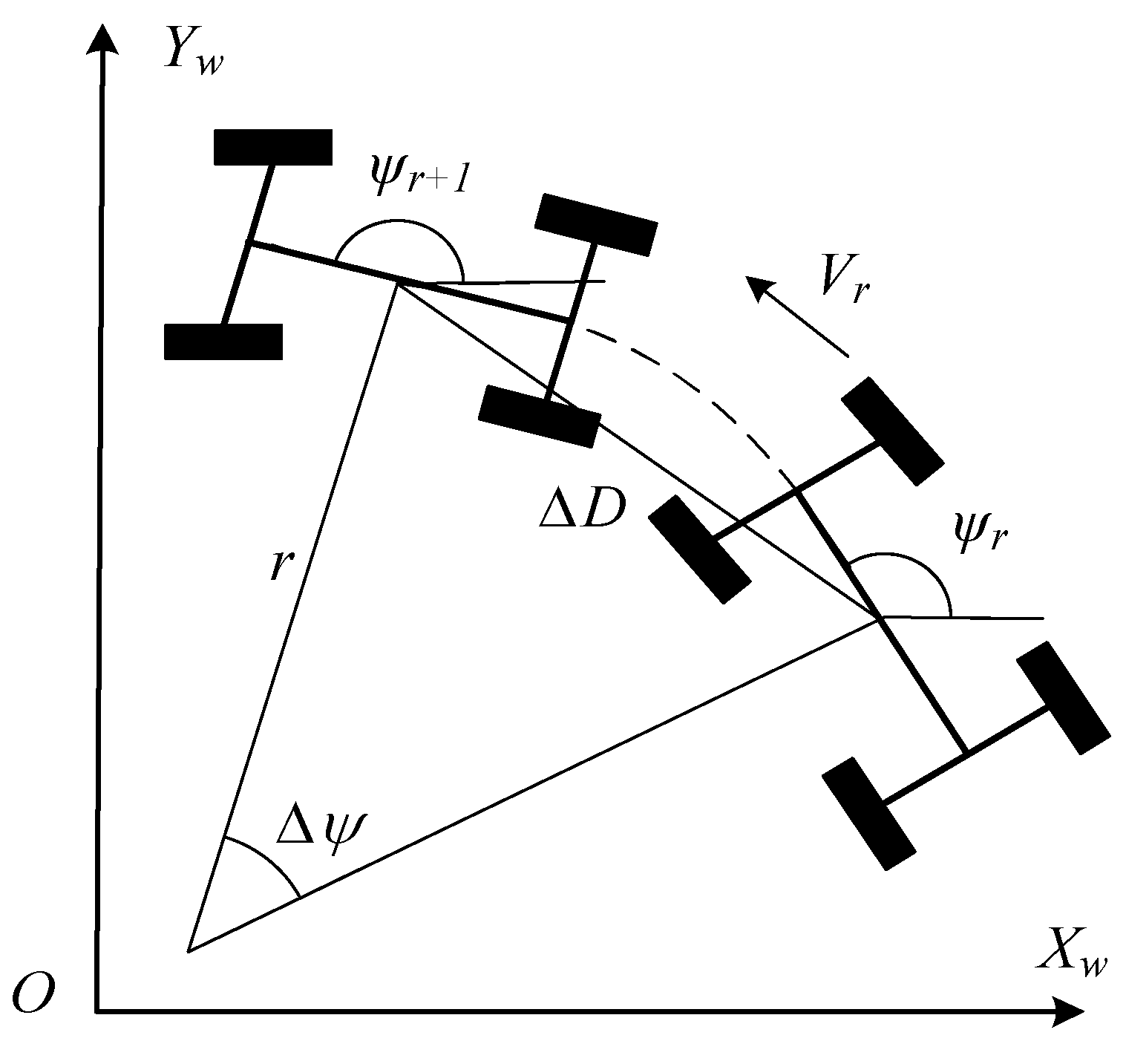
3. Chassis Planar Positioning Principle

4. Chassis Simulation Design and Verification
4.1. Load-Bearing Performance Simulation Analysis


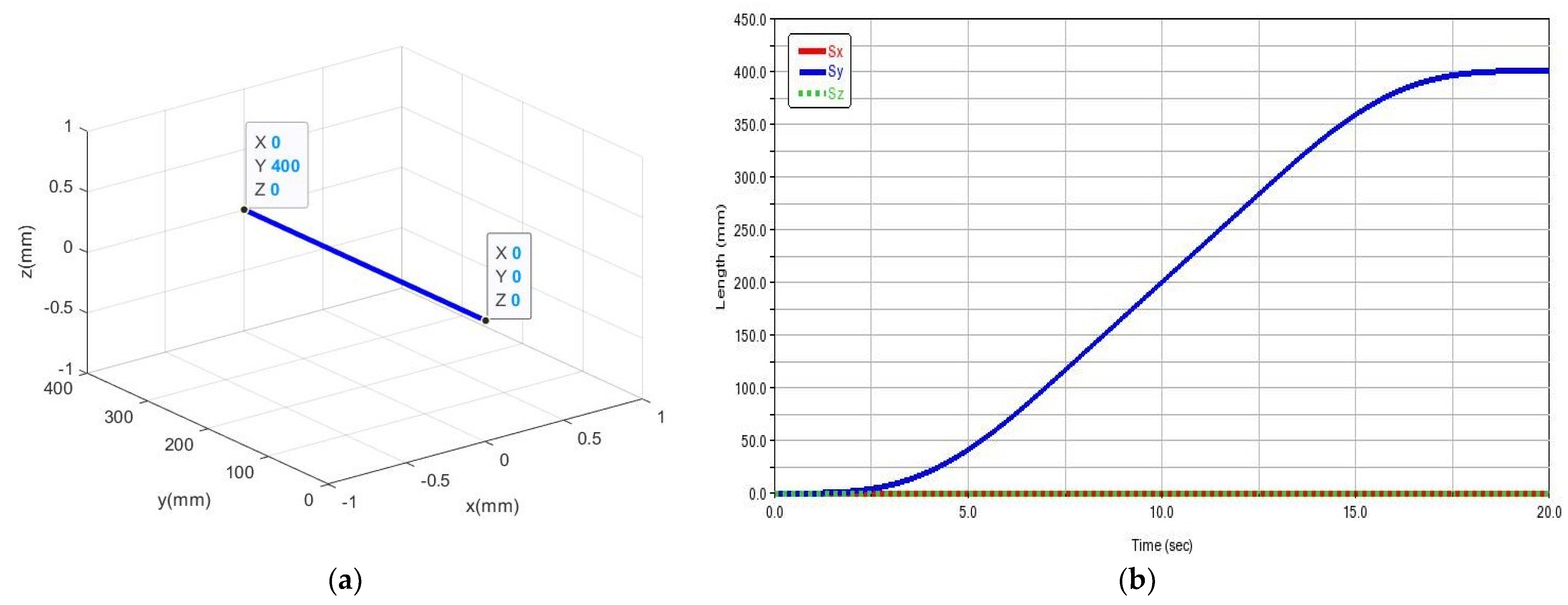
4.2. Motion Trajectory Simulation
5. Experimental Verification and Analysis
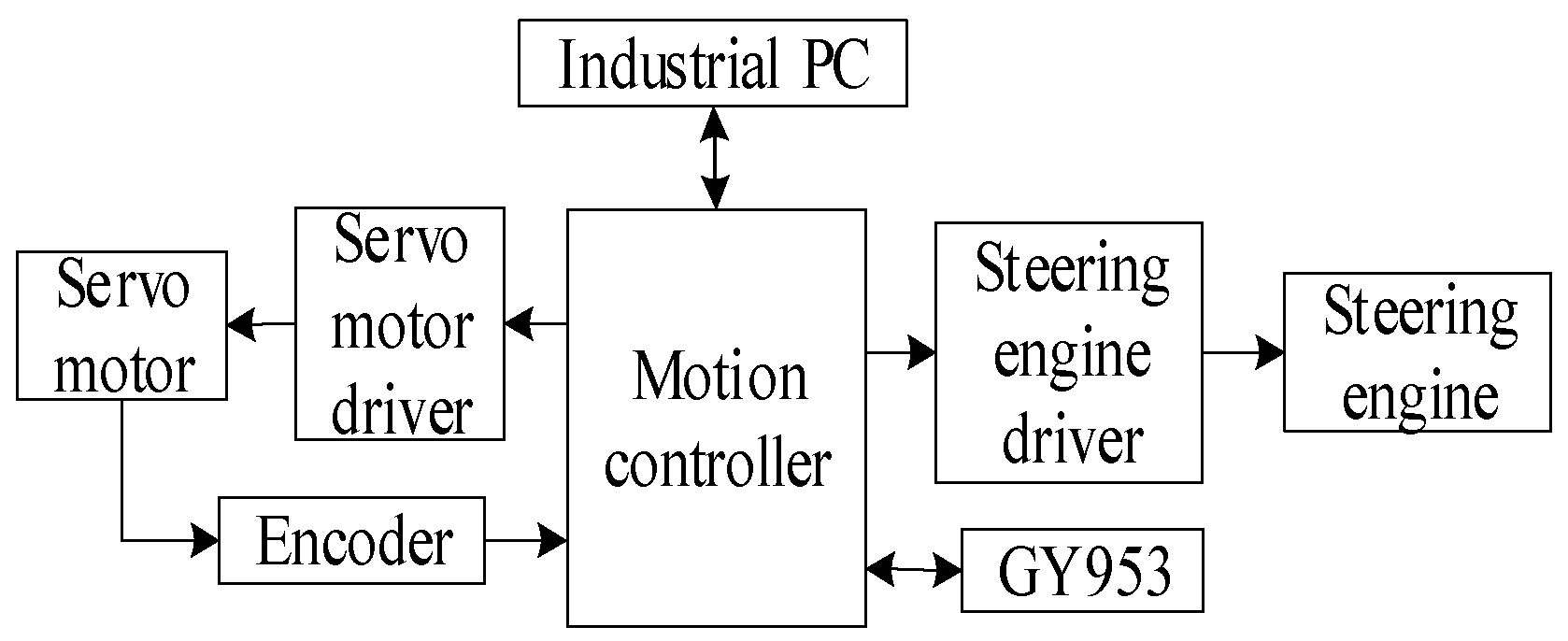
5.1. Physical System Construction
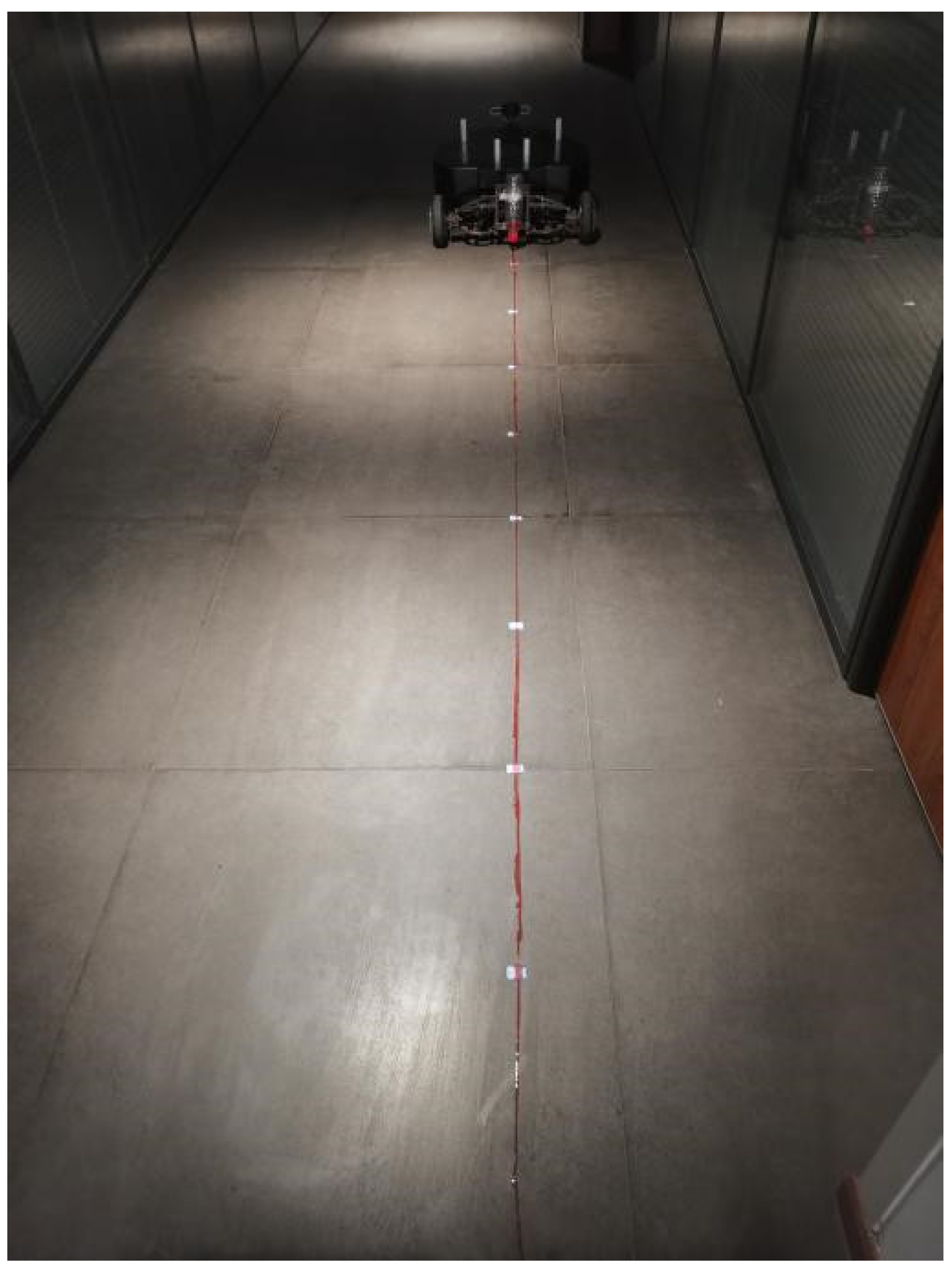
5.2. Experiment and Analysis of Straight-Line Motion in the Laboratory
5.3. Experiment and Analysis of Steering in the Laboratory

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | The Coordinates of the Ideal Trajectory Point/cm | The Coordinates of the Actual Trajectory Point/cm | The Deviation in the Distance/cm |
|---|---|---|---|
| 1 | (1.4, 10.4) | (1.4, 10.4) | 0 |
| 2 | (5.4, 20.0) | (5.8, 19.7) | 0.50 |
| 3 | (11.7,28.3) | (11.1, 28.9) | 0.85 |
| 4 | (20.0, 34.6) | (19.6, 35.2) | 0.72 |
| 5 | (29.6, 38.6) | (29.1, 40.6) | 2.06 |
| 6 | (40.0, 40.0) | (40.0, 43.3) | 2.60 |
| 7 | (50.4, 38.6) | (51.1, 41.0) | 2.50 |
| 8 | (60.0, 34.6) | (60.7,35.7) | 1.30 |
| 9 | (68.3, 28.3) | (69.4, 29.4) | 1.56 |
| 10 | (74.6, 20.0) | (74.9, 20.2) | 0.36 |
| 11 | (78.6, 10.4) | (79.6, 10.7) | 1.04 |
| 12 | (80.0, 0) | (80.3, 0) | 0.30 |

5.4. Experiment and Analysis of Setpoint Parking in the Laboratory
5.5. Experiment and Analysis of Straight-Line Motion in the Greenhouse Tomato Growing Area
5.6. Experiment and Analysis of Steering in the Greenhouse Tomato Growing Area
5.7. Experiment and Analysis of Setpoint Parking in the Greenhouse Tomato Growing Area
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bac, C.W.; Hemming, J.; Tuijl, B.A.; Barth, R.; Wais, E.; Henten, E.J. Performance Evaluation of a Harvesting Robot for Sweet Pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Rong, J.C.; Wang, P.B.; Yang, Q.; Huang, F. A Field-Tested Harvesting Robot for Oyster Mushroom in Greenhouse. Agronomy 2021, 11, 1210. [Google Scholar] [CrossRef]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Feng, Q.C.; Zou, W.; Fan, P.F.; Zhang, C.F.; Wang, X. Design and test of robotic harvesting system for cherry tomato. Int. J. Agric. Biol. Eng. 2018, 11, 96–100. [Google Scholar] [CrossRef]
- Hayashi, S.; Yamamoto, S.; Tsubota, S.; Ochiai, Y.; Kobayashi, K.; Kamata, J.; Kurita, M.; Inazumi, H.; Peter, R. Automation technologies for strawberry harvesting and packing operations in Japan. J. Berry Res. 2014, 4, 19–27. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.Z. Research Progress Analysis of Robotic Harvesting Technologies in Greenhouse. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–18. [Google Scholar] [CrossRef]
- Mishra, H.; Giordano, A.M.; Stefano, M.D.; Lampariello, R.; Ott, C. Inertia-Decoupled Equations for Hardware-in-the-Loop Simulation of an Orbital Robot with External Forces. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: Piscataway, NJ, USA, 2020; pp. 1879–1886. [Google Scholar] [CrossRef]
- Ringdahl, O.; Kurtser, P.; Edan, Y. Evaluation of approach strategies for harvesting robots: Case study of sweet pepper harvesting. J. Intell. Robot. Syst. 2019, 95, 149–164. [Google Scholar] [CrossRef] [Green Version]
- Taqi, F.; Al-Langawi, F.; Abdulraheem, H.; EI-Abd, M. A cherry-tomato harvesting robot. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 463–468. [Google Scholar] [CrossRef]
- Masuzawa, H.; Miura, J.; Oishi, S. Development of a mobile robot for harvest support in greenhouse horticulture—Person following and mapping. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 541–546. [Google Scholar] [CrossRef]
- Zhang, K.L.; Yang, L.; Wang, L.J.; Zhang, L.X.; Zhang, T.Z. Design and Experiment of Elevated Substrate Culture Strawberry Picking Robot. Trans. Chin. Soc. Agric. Mach. 2012, 43, 165–172. [Google Scholar] [CrossRef]
- Jin, Z.M.; Sun, W.; Zhang, J.; Shen, C.; Zhang, H.Y.; Han, S.Q. Intelligent Tomato Picking Robot System Based on Multimodal Depth Feature Analysis Method. IOP Conf. Ser. Earth Environ. Sci. 2020, 440, 042074. [Google Scholar] [CrossRef]
- Ji, C.; Feng, Q.C.; Yuan, T.; Tan, Y.Z.; Li, W. Development and Performance Analysis on Cucumber Harvesting Robot System in Greenhouse. Robot 2011, 33, 726–730. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, B.; Liu, X.; Ren, H.; Li, X.Y.; Li, Y.M. Structural model and bundling capacity of crawler picking and baling machine for straw wasted in field. Comput. Electron. Agric. 2020, 175, 105622. [Google Scholar] [CrossRef]
- Fujita, T.; Segawa, W. Object gripping and lifting based on plane detection by tracked mobile robot with two manipulators. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 412–416. [Google Scholar] [CrossRef]
- Xing, Z.Z.; Yu, L.Z.; Fan, L.; Shang, L.; Zhang, X.L. Structure design and type selection of a crawler manipulator chassis. J. Phys. Conf. Ser. 2021, 1885, 052028. [Google Scholar] [CrossRef]
- Barakat, M.H.; Ammar, H.H.; Elsamanty, M. Experimental Path tracking optimization and control of a nonlinear skid steering tracked mobile robot. In Proceedings of the 2020 2nd Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 24–26 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 434–438. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Woo, S.; Uyeh, D.D.; Kim, J.; Kim, Y.; Kang, S.; Kim, K.C.; Lee, S.Y.; Ha, Y.; Lee, W.S. Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy 2020, 10, 1751. [Google Scholar] [CrossRef]
- Zhu, T.; Xiang, J. Chassis Design of Tomato Picking Robot in the Greenhouse. J. Phys. Conf. Ser. 2021, 2136, 012047. [Google Scholar] [CrossRef]
- Zu, L.L.; Han, M.Z.; Liu, J.Q.; Liu, P.Z.; Li, T.; Su, F. Design and Experiment of Nondestructive Post-Harvest Device for Tomatoes. Agriculture 2022, 12, 1233. [Google Scholar] [CrossRef]
- Sun, W.C.; Li, S.G.; Wang, W.Q.; Zhao, P.J.; Yang, R.Q. Design of Chassis and Kinematics Research of Wheeled Robot. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 2405–2408. [Google Scholar] [CrossRef]
- Kang, S.M.; Sung, Y.W. A Four-Wheeled Mobile Robot with Omnidirectionality. J. Inst. Converg. Signal Process. 2022, 23, 21–27. [Google Scholar] [CrossRef]
- Hrbáček, J.; Ripel, T.; Krejsa, J. Ackermann mobile robot chassis with independent rear wheel drives. In Proceedings of the Proceedings of 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010, Ohrid, Macedonia, 6–8 September 2010; IEEE: Piscataway, NJ, USA, 2010; p. T5-46–T5-51. [Google Scholar] [CrossRef]
- Xu, C.; Xiong, Z.; Jiang, X.P.; Deng, M.; Huang, G.C. Design and Research of the Cluster Tomato Picking Robot. Mod. Agric. Equip. 2021, 42, 15–23. [Google Scholar] [CrossRef]
- Li, Y.L.; Wen, X.G. Analysis on the difference of greenhouse tomato production between China and the Netherlands. Appl. Eng. Technol. 2018, 38, 10–14. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xun, Y.; Wang, Y.K.; Yang, Q.H. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar] [CrossRef]
- Pang, J.; Han, Q.C.; Zhou, S.; Li, H.H.; Song, J.W.; Liu, H. The Integrative Effects of Irrigation and Aeration on Growth and Water Use Efficiency of Greenhouse Tomato. J. Irrig. Drain. 2022, 41, 87–94. [Google Scholar] [CrossRef]
- Hou, Z.L.; Li, Z.G.; Fadiji, T.B.; Fu, J. Soft grasping mechanism of human fingers for tomato-picking bionic robots. Comput. Electron. Agric. 2021, 182, 106010. [Google Scholar] [CrossRef]
- Wang, Z.H.; Chen, X.J.; Lv, D.S.; Li, W.H.; Wang, T.Y.; Wei, C.L. Effects of water and fertilizer coupling on the yield and quality of processing tomato under aerated drip irrigation. Trans. Chin. Soc. Agric. Eng. 2020, 36, 66–75. [Google Scholar] [CrossRef]
- Li, H.Y.; Sun, Q.; Liu, N.; Liu, S.L.; Shi, Y.G. A Novel Tomato Volume Measurement Method based on Machine Vision. Teh. Vjesn. 2021, 28, 1674–1680. [Google Scholar] [CrossRef]
- Xu, B.; Cui, X.; Ji, W.; Yuan, H.; Wang, J.C. Apple Grading Method Design and Implementation for Automatic Grader Based on Improved YOLOv5. Agriculture 2023, 13, 124. [Google Scholar] [CrossRef]
- Wu, J.H.; Zhang, Y.; Zhang, S.H.; Wang, H.J.; Liu, L.; Shi, Y.G. Simulation Design of a Tomato Picking Manipulator. Teh. Vjesn. 2021, 28, 1253–1261. [Google Scholar] [CrossRef]
- Shi, Y.G.; Zhang, W.; Yang, T.; Wang, Y.; Liu, L.; Cui, Y.J. Flexible joints of picking manipulator based on current feedback. IEEE Access 2020, 8, 85329–85338. [Google Scholar] [CrossRef]
- Gao, H.; Liang, H.W. Simulation and Real-vehicle experiment of automatic parking system based on Multi-sensors and Multi-path planning. Autom. Instrum. 2011, 162–165, 168. [Google Scholar] [CrossRef]
- Wei, L.T.; Wang, X.Y.; Qiu, B.; Li, L.; Zhou, D.L.; Lin, J.G. Tracking and Collision Avoidance of Autonomous Vehicle Based on Adaptive Preview Path. J. Mech. Eng. 2022, 58, 184–193. [Google Scholar] [CrossRef]
- Zhao, Z.G.; Zhou, L.J.; Zhu, Q. Preview Distance Adaptive Optimization for the Path Tracking Control of Unmanned Vehicle. J. Mech. Eng. 2018, 54, 166–173. [Google Scholar] [CrossRef]
- Santhanakrishnan, M.N.; Rayappan, J.B.; Kannan, R. Implementation of extended Kalman filter-based simultaneous localization and mapping: A point feature approach. Sādhanā 2017, 42, 1495–1504. [Google Scholar] [CrossRef]
- Ahn, J.; Shin, S.; Kim, M.; Park, J. Accurate path tracking by adjusting look-ahead point in pure pursuit method. Int. J. Automot. Technol. 2021, 22, 119–129. [Google Scholar] [CrossRef]
- Zhang, J.; Xie, Y.L. Optimization of lightweight frame for a micro-electric commercial vehicle. Mech. Electr. Eng. Mag. 2020, 37, 283–287. [Google Scholar] [CrossRef]
- Wang, H.; Gao, L.; Chen, M.H.; Jin, L.L. Deep Drawing of A7075 with T6 Temper at Elevated Temperature. China Mech. Eng. 2012, 23, 232–235. [Google Scholar] [CrossRef]






















| Number | The Coordinate of the Actual Point/cm | Number | The Coordinate of the Actual Point/cm |
|---|---|---|---|
| 1 | (0.7, 320.2) | 16 | (0.2, 319.7) |
| 2 | (1.2, 318.9) | 17 | (−0.3, 319.8) |
| 3 | (0.7, 320.5) | 18 | (−0.5, 320.4) |
| 4 | (−2.1, 320.4) | 19 | (1.2, 321.1) |
| 5 | (−0.7, 319.9) | 20 | (−0.6, 320.4) |
| 6 | (−0.5, 319.7) | 21 | (1.9, 320.1) |
| 7 | (−0.2, 320.9) | 22 | (−0.2, 319.9) |
| 8 | (1.6, 319.5) | 23 | (0.5, 318.9) |
| 9 | (0.8, 318.8) | 24 | (−0.2, 320.0) |
| 10 | (−1.9, 320.9) | 25 | (−0.3, 319.7) |
| 11 | (−1.1, 319.5) | 26 | (−0.6, 320.1) |
| 12 | (0.0, 320.4) | 27 | (0.4, 321.2) |
| 13 | (1.3, 319.9) | 28 | (−1.3, 320.4) |
| 14 | (−1.6, 320.2) | 29 | (0.3, 320.2) |
| 15 | (0.3, 320.1) | 30 | (−0.2, 319.9) |
| Number | The Coordinate of the Target Point/cm | The Coordinate of the Actual Point/cm |
|---|---|---|
| 1 | (0, 40) | (0.3, 40.4) |
| 2 | (0, 80) | (0.5, 79.3) |
| 3 | (0, 120) | (−0.2, 119.8) |
| 4 | (0, 160) | (0.6, 160.8) |
| 5 | (0, 200) | (0.9, 199.7) |
| 6 | (0, 240) | (−0.6, 240.5) |
| 7 | (0, 280) | (0.8, 281.1) |
| 8 | (0, 320) | (0.9, 321.3) |
| Number | The Coordinate of the Actual Point/cm | Number | The Coordinate of the Actual Point/cm |
|---|---|---|---|
| 1 | (2.7, 321.2) | 16 | (1.4, 320.1) |
| 2 | (3.5, 318.4) | 17 | (−0.3, 320.3) |
| 3 | (1.5, 321.5) | 18 | (−2.5, 319.6) |
| 4 | (3.4, 320.4) | 19 | (−2.1, 318.7) |
| 5 | (0.9, 319.5) | 20 | (1.9, 319.7) |
| 6 | (−2.6, 319.3) | 21 | (3.7, 320.0) |
| 7 | (−7.3, 321.8) | 22 | (−0.5, 319.9) |
| 8 | (−4.7, 320.5) | 23 | (−6.8, 320.6) |
| 9 | (4.2, 321.3) | 24 | (2.1, 320.3) |
| 10 | (3.9, 318.9) | 25 | (−3.3, 321.1) |
| 11 | (3.6, 318.5) | 26 | (3.6, 320.3) |
| 12 | (2.2, 321.9) | 27 | (0.3, 321.2) |
| 13 | (1.3, 320.9) | 28 | (2.5, 320.5) |
| 14 | (3.0, 319.5) | 29 | (−5.3, 320.4) |
| 15 | (0.4, 320.1) | 30 | (4.7, 321.6) |
| Number | The Coordinates of the Ideal Trajectory Point/cm | The Coordinates of the Actual Trajectory Point/cm | The Deviation in the Distance/cm |
|---|---|---|---|
| 1 | (1.4, 10.4) | (1.1, 10.5) | 0.32 |
| 2 | (5.4, 20.0) | (4.8, 20.4) | 0.72 |
| 3 | (11.7,28.3) | (10.8, 29.2) | 1.27 |
| 4 | (20.0, 34.6) | (18.6, 36.9) | 2.69 |
| 5 | (29.6, 38.6) | (28.4, 42.9) | 4.46 |
| 6 | (40.0, 40.0) | (40.0, 43.9) | 3.90 |
| 7 | (50.4, 38.6) | (51.3, 42.0) | 3.52 |
| 8 | (60.0, 34.6) | (62.4, 38.7) | 4.75 |
| 9 | (68.3, 28.3) | (72.6, 32.6) | 6.08 |
| 10 | (74.6, 20.0) | (78.8, 22.4) | 4.84 |
| 11 | (78.6, 10.4) | (81.7, 11.2) | 3.20 |
| 12 | (80.0, 0) | (81.4, 0) | 1.40 |
| Number | The Coordinate of the Target Point/cm | The Coordinate of the Actual Point/cm |
|---|---|---|
| 1 | (0, 40) | (0.5, 40.7) |
| 2 | (0, 80) | (−0.7, 80.9) |
| 3 | (0, 120) | (−1.5, 120.4) |
| 4 | (0, 160) | (0.8, 159.1) |
| 5 | (0, 200) | (1.8, 201.3) |
| 6 | (0, 240) | (2.1, 238.9) |
| 7 | (0, 280) | (−1.9, 281.5) |
| 8 | (0, 320) | (2.5, 321.8) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, L.; Liu, R.; Liu, K.; Li, K.; Liu, L.; Shi, Y. Greenhouse Tomato Picking Robot Chassis. Agriculture 2023, 13, 532. https://doi.org/10.3390/agriculture13030532
Su L, Liu R, Liu K, Li K, Liu L, Shi Y. Greenhouse Tomato Picking Robot Chassis. Agriculture. 2023; 13(3):532. https://doi.org/10.3390/agriculture13030532
Chicago/Turabian StyleSu, Long, Ruijia Liu, Kenan Liu, Kai Li, Li Liu, and Yinggang Shi. 2023. "Greenhouse Tomato Picking Robot Chassis" Agriculture 13, no. 3: 532. https://doi.org/10.3390/agriculture13030532