
Design and Test of a Tractor Electro-Hydraulic-Suspension Tillage-Depth and Loading-Control System Test Bench

Abstract
:1. Introduction
2. Materials and Methods
2.1. Theoretical Analysis
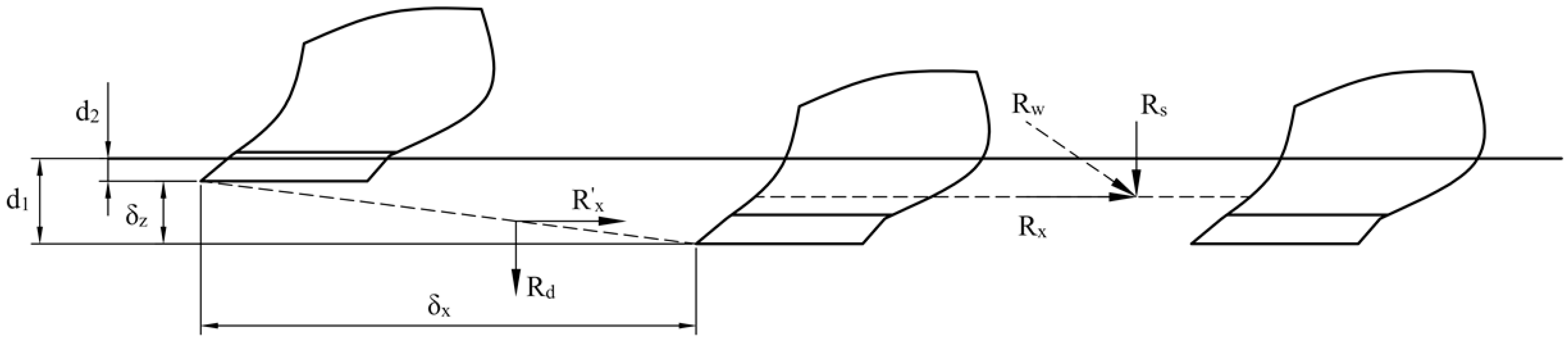
2.1.1. Plough Body Force Model
2.1.2. Slip Model
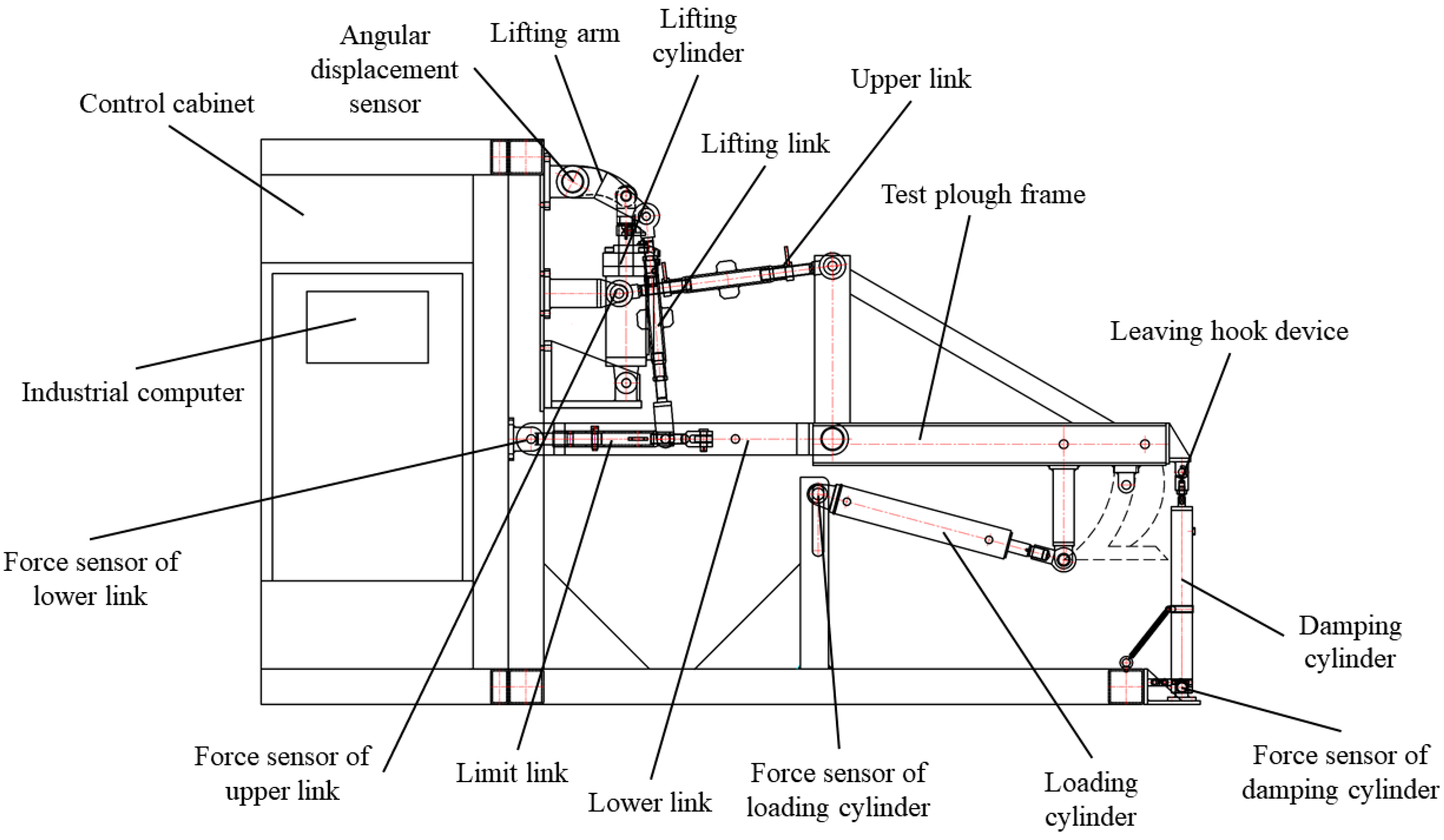
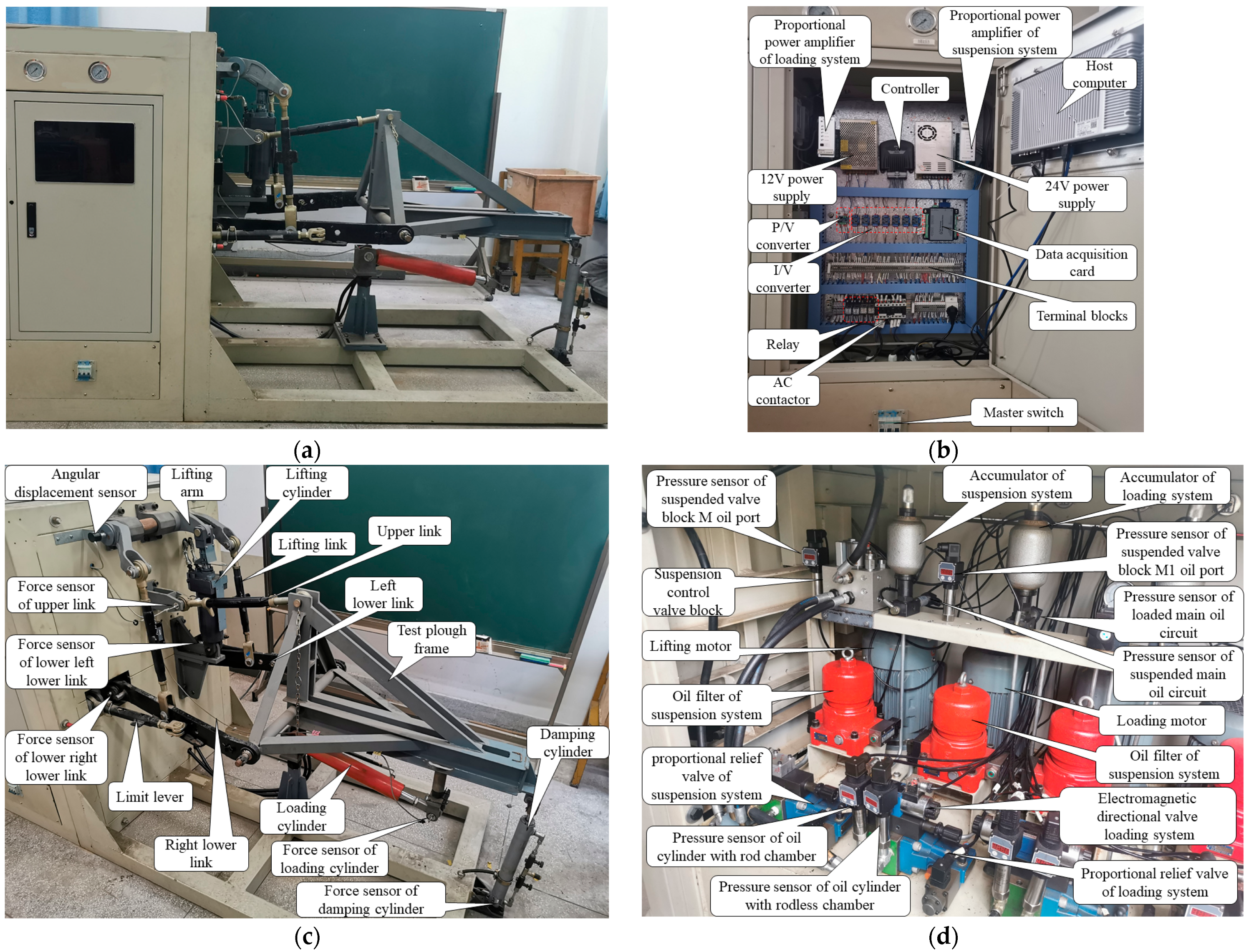
2.2. The Overall Structure Scheme of the Test Bench
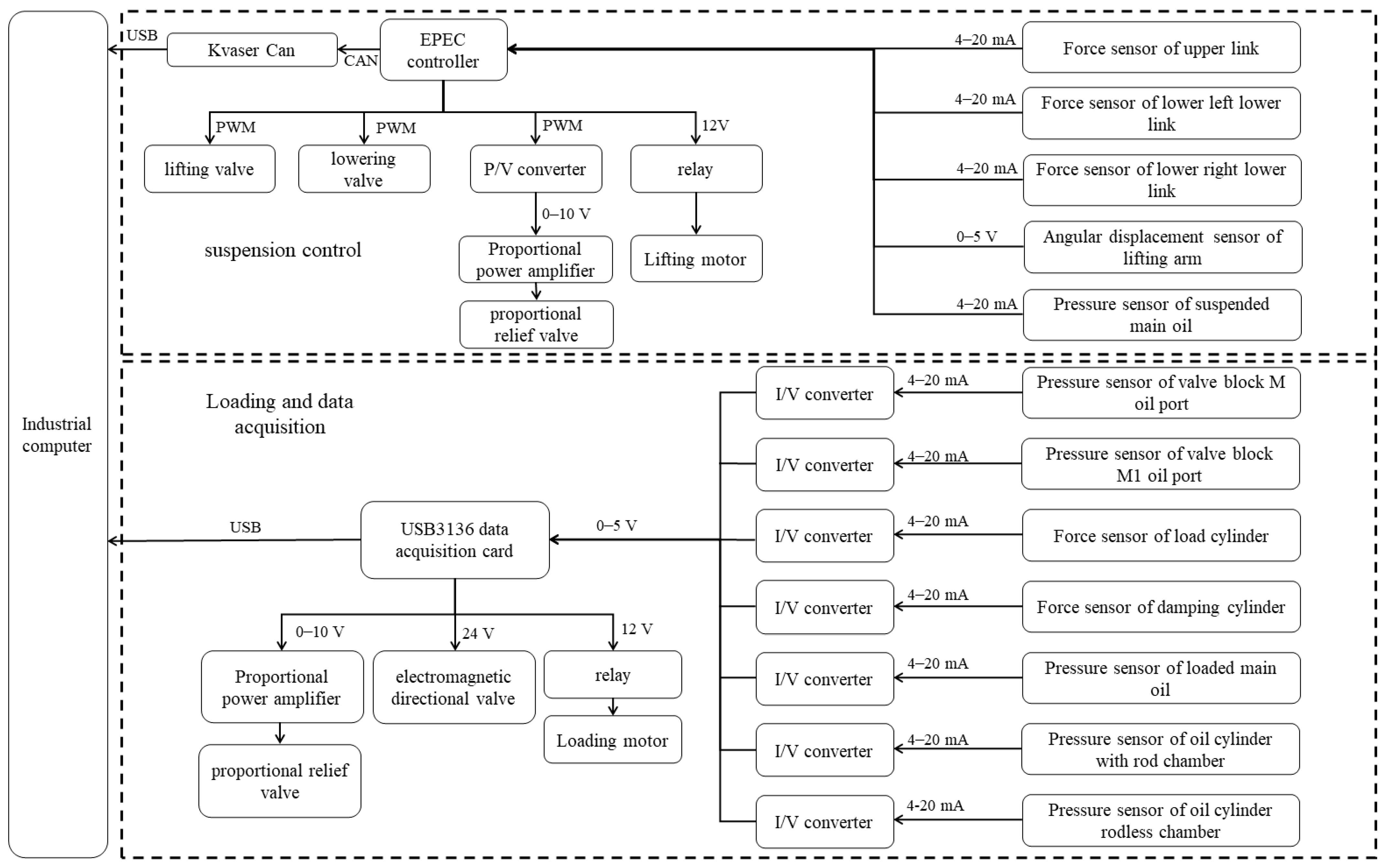
2.3. Hardware Composition of Electro-Hydraulic Measurement and Control System
2.3.1. Industrial Computer
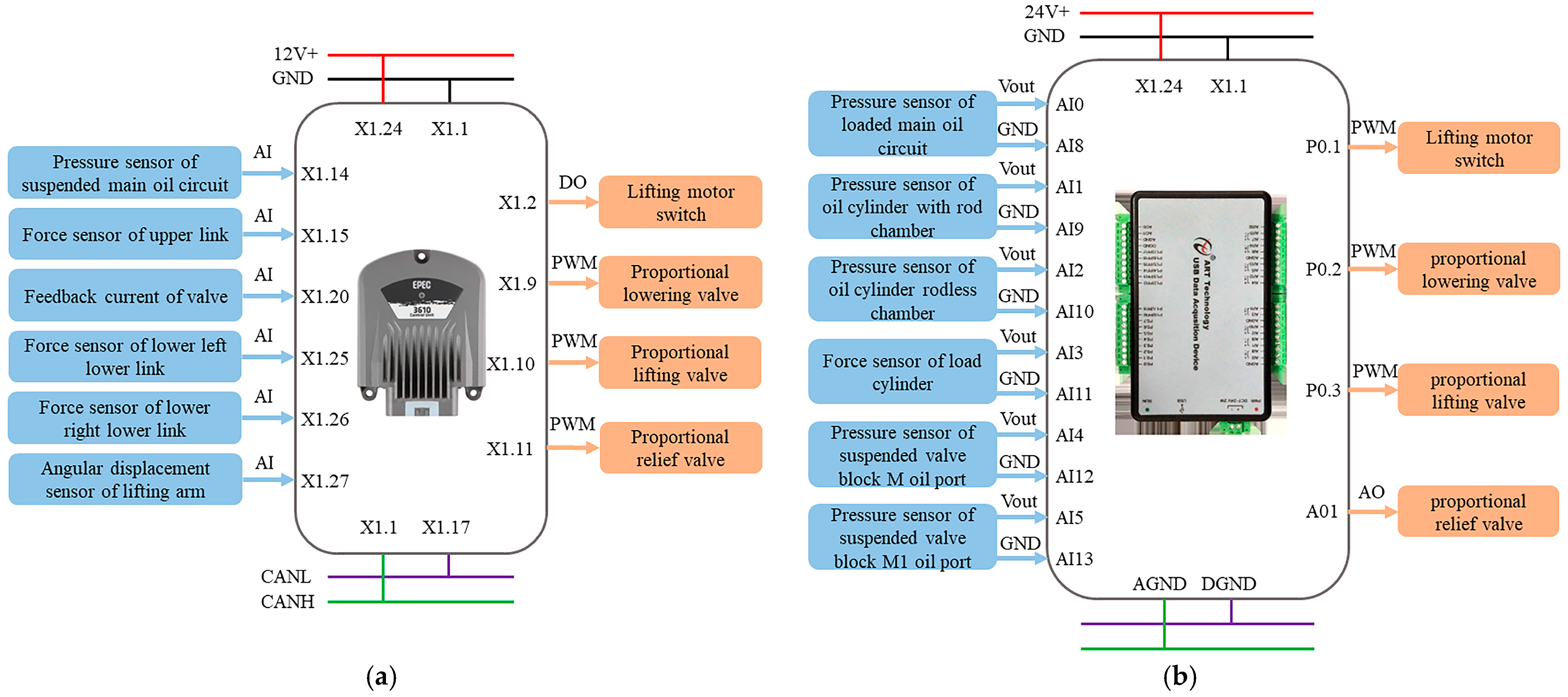
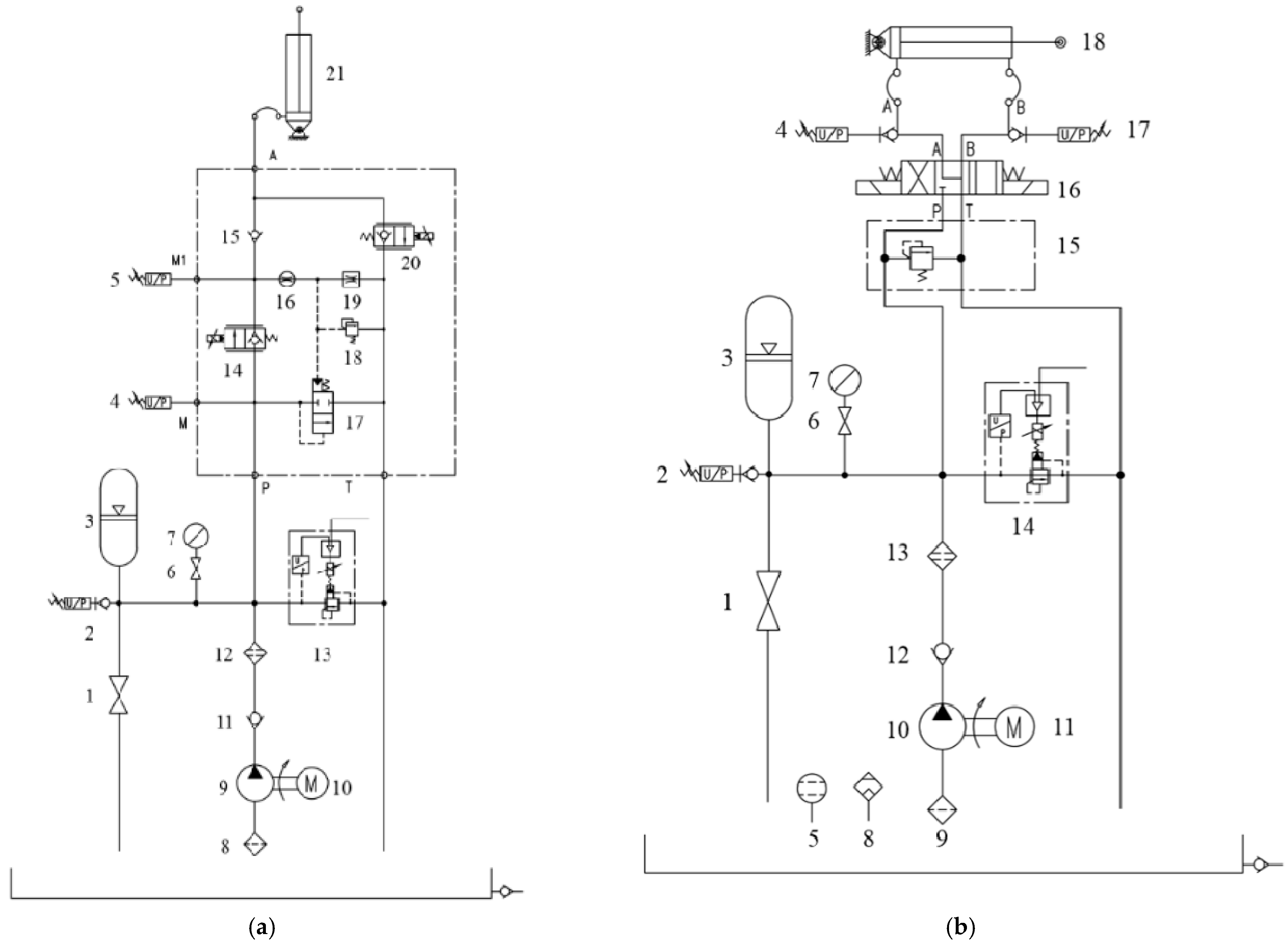
2.3.2. Suspension Electro-Hydraulic Control
2.3.3. Loading Electro-Hydraulic Control and Data-Acquisition System
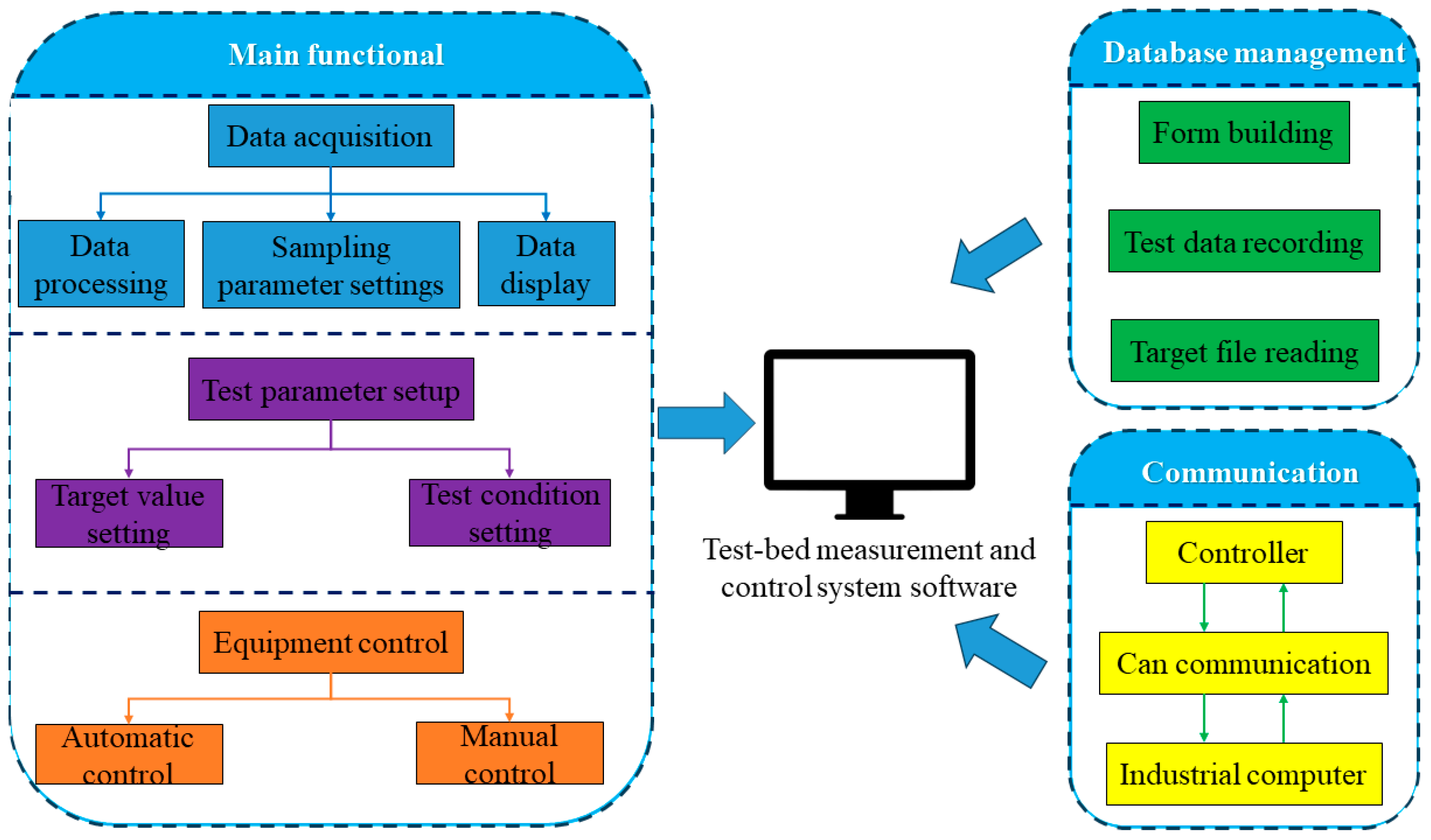
2.4. Software Design of Measurement and Control System
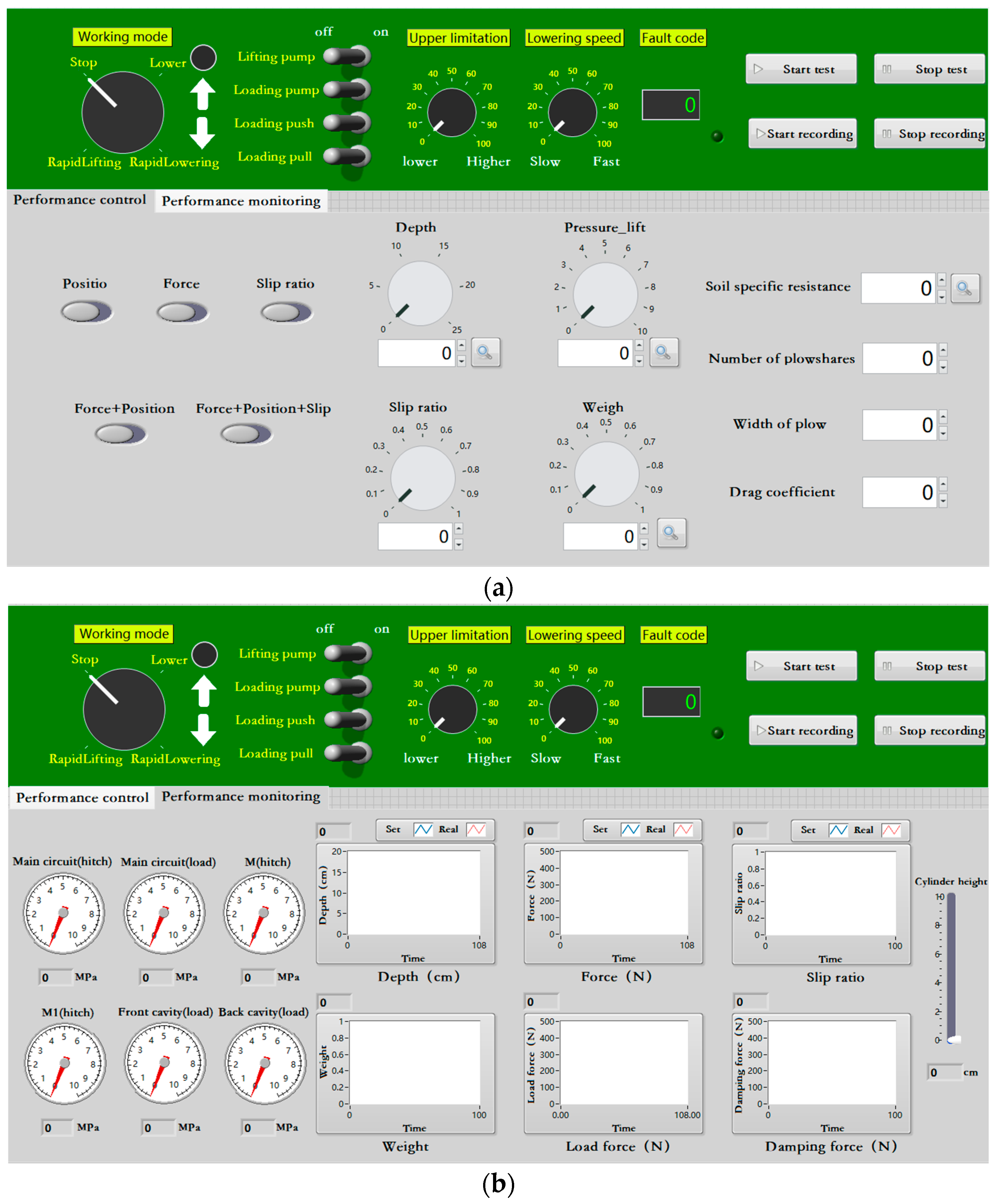
2.4.1. Measurement and Control System Operation Panel
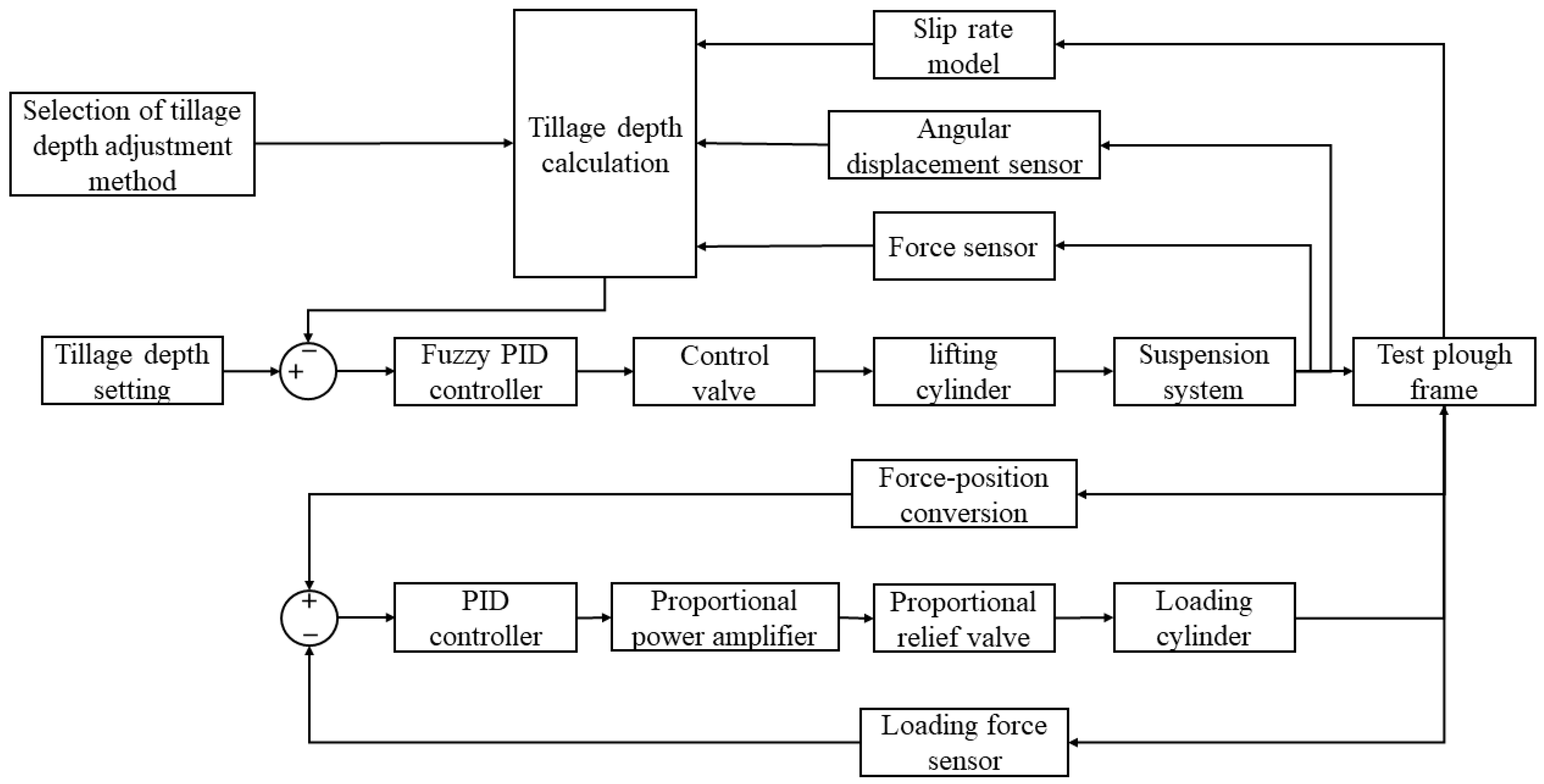
2.4.2. Loading-Control System Based on PID
2.4.3. Suspension Control System Based on Fuzzy PID
3. Results
3.1. Calibration Test
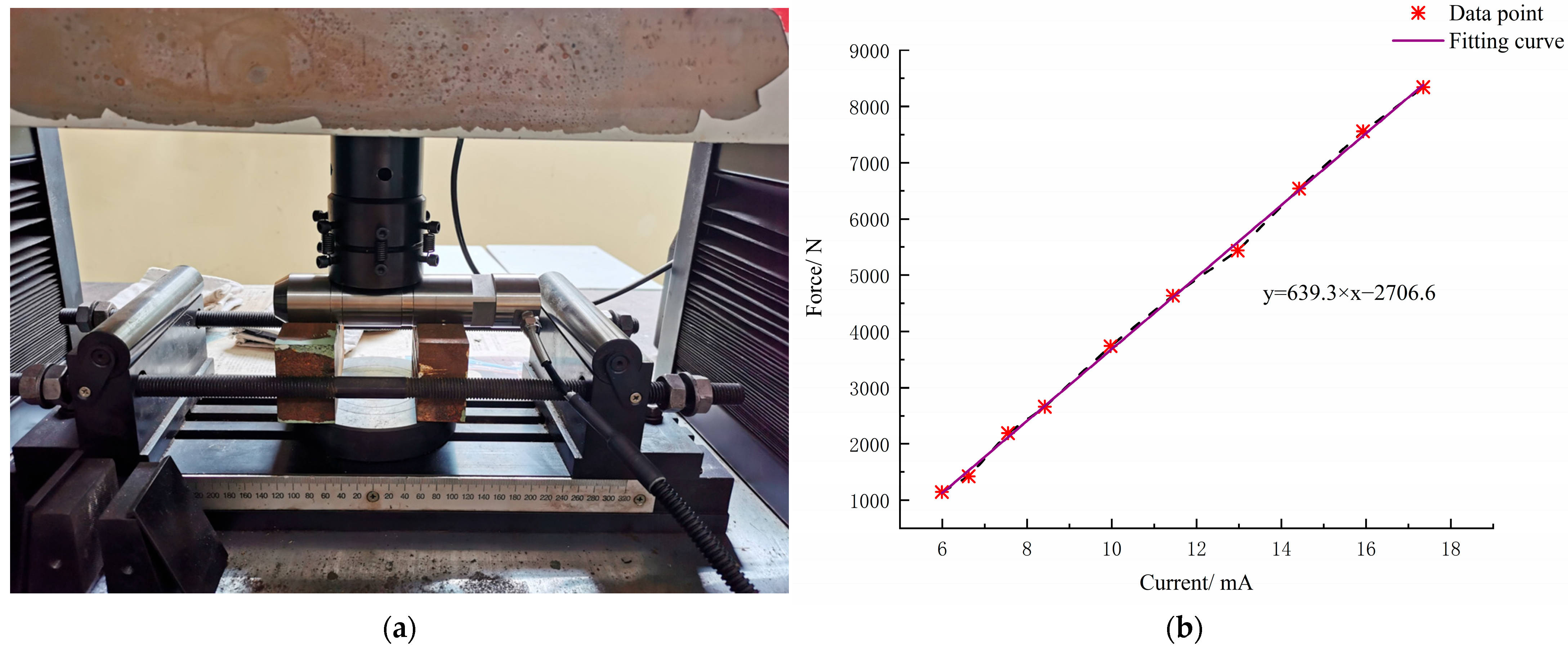
3.1.1. Calibration Test of Force Sensor
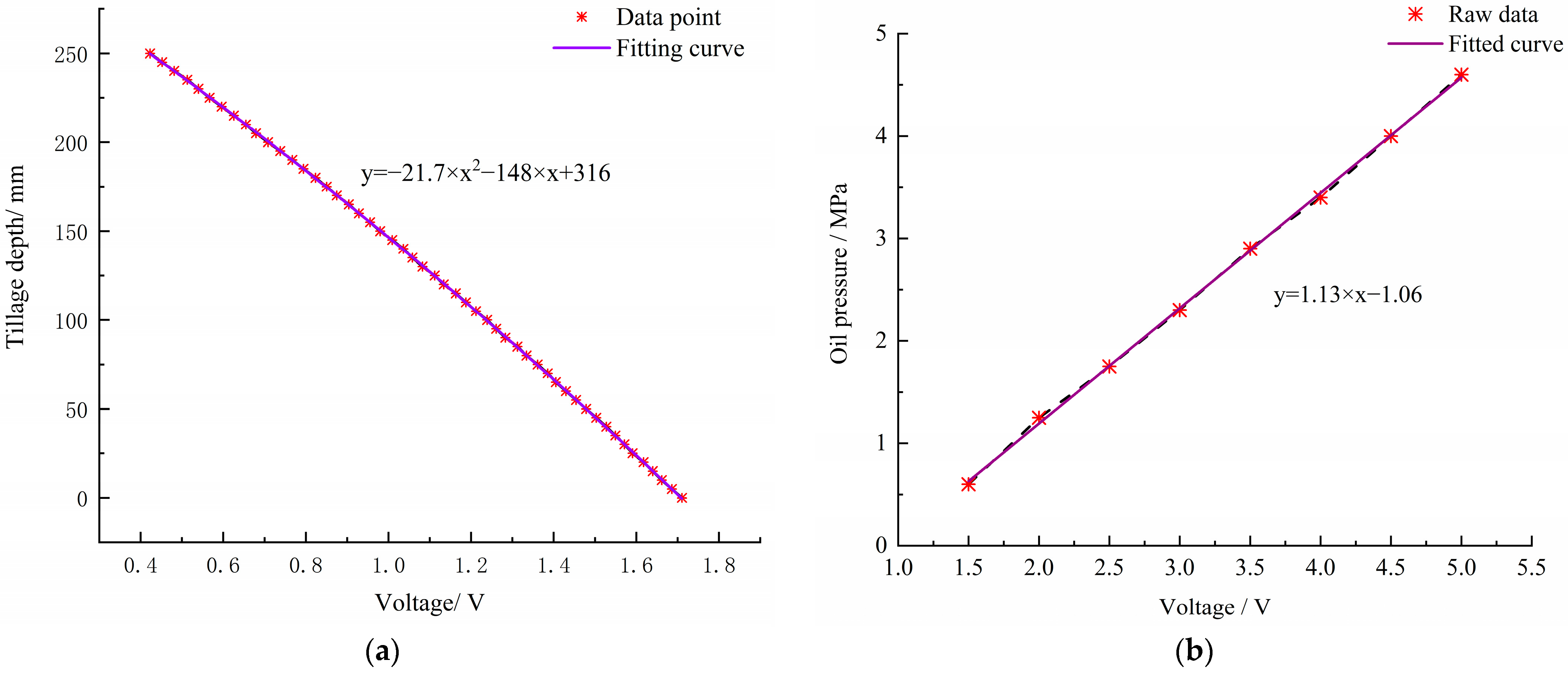
3.1.2. Calibration Test of Angular Displacement Sensor
3.1.3. Calibration Test of Electromagnetic Proportional Relief Valve
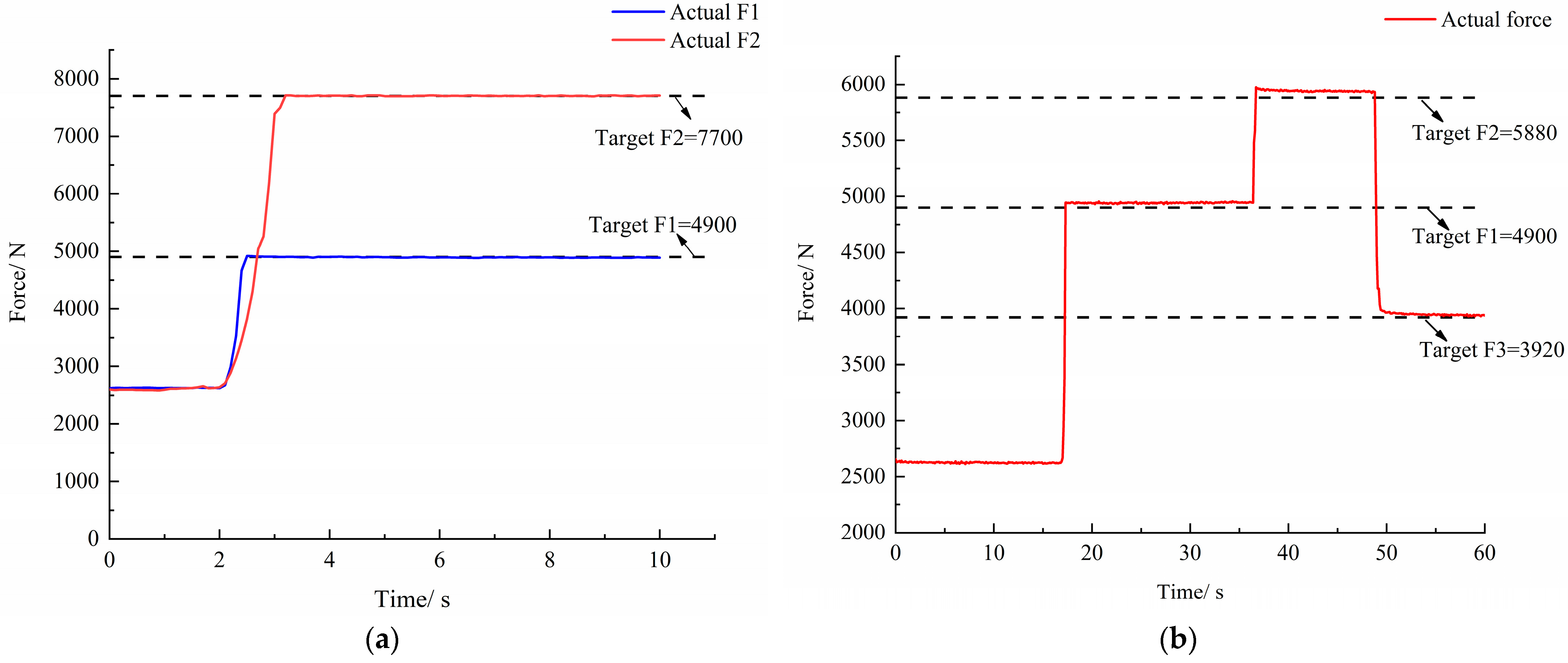
3.2. Loading-Control Test
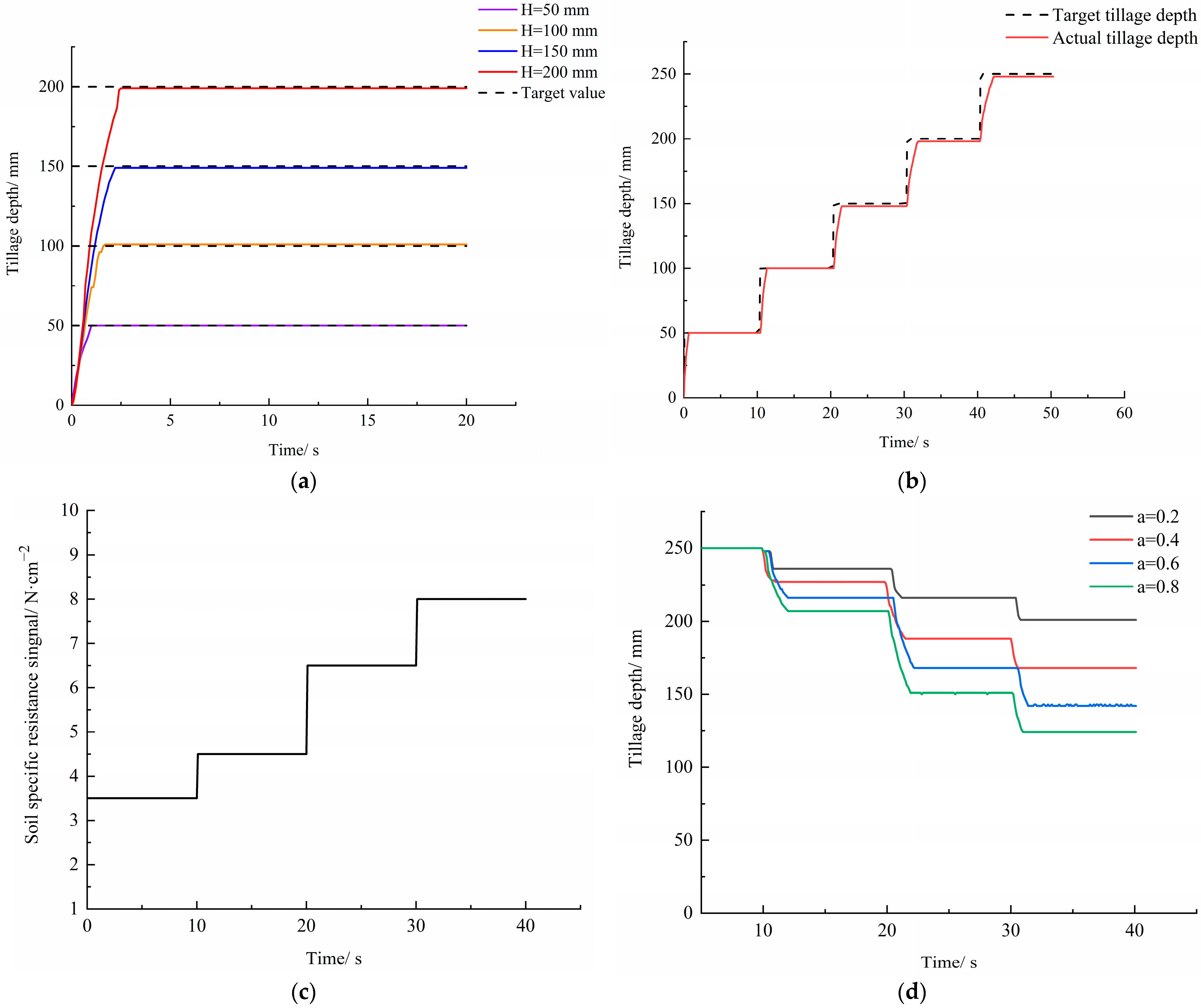
3.3. Tillage-Depth Control Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, X.X.; Lu, Z.X.; Song, Y.; Cheng, Z.; Jiang, C.X.; Qian, J.; Lu, Y. Development Status and Research Progress of a Tractor Electro-Hydraulic Hitch System. Agriculture 2022, 12, 1547. [Google Scholar] [CrossRef]
- Xu, J.; Li, R.; Li, Y.; Zhang, Y.; Sun, H.; Ding, X.; Ma, Y. Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System. Processes 2021, 9, 1920. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.; Dai, D.; Wang, X.; Wang, S.M. Review of Electro-hydraulic Hitch System Control Method of Automated Tractors. Int. J. Agric. Biol. Eng. 2021, 14, 1–11. [Google Scholar] [CrossRef]
- Wang, L.; Zong, J.H.; Wang, Y.; Fu, L.L.; Mao, X.; Wang, S.M. Compilation and Bench Test of Traction Force Load Spectrum of Tractor Three-point Hitch Based on Optimal Distribution Fitting. Trans. CSAE 2022, 38, 41–49. [Google Scholar]
- Tao, Q.W.; Yan, X.H.; Tong, Y.K.; Yan, Y.X.; Xu, L.Y. Current Status and Prospect of Tractor Indoor Bench Test Technology. J. Chin. Agric. Mech. 2021, 42, 121–128. [Google Scholar]
- Xu, L.Y.; Zhao, Y.R.; Zhao, X.P.; Liu, M.L.; Ni, Q. Design and Test of Multifunctional Test System for Electric Tractor. Trans. Chin. Soc. Agric. Mach. 2020, 51, 355–363. [Google Scholar]
- Li, Q.H. Study on the Electrohydraulic Force-Loading System for the Indoor Simulation of Tractor-Implement Work Unit. Master’s Thesis, China Agriculture University, Beijing, China, 2000. [Google Scholar]
- Anche, G.M.; Devika, K.B.; Subramanian, S.C. Robust Pitching Disturbance Force Attenuation for Tractor Considering Functional Constraints. IEEE Access 2020, 8, 86419–86432. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J.H.; Huang, H.L.; He, J.Y. Fuzzy Sliding Mode Control with State Estimation for Velocity Control System of Hydraulic Cylinder Using a New Hydraulic Transformer. Eur. J. Control 2019, 48, 104–114. [Google Scholar] [CrossRef]
- Zhu, C.Y. Development of Tractor Hydraulic Suspension Test Bench. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2014. [Google Scholar]
- Shang, G.G.; Gu, X.; Zhu, C.Y. Research on Hydraulic Hitch Test Bench of Tractor. Eur. J. Control 2015, 34, 162–166. [Google Scholar]
- Cong, Q.; Ma, B.S.; Li, K.; Chen, T.K.; Gou, R.R.; Yang, Q.W. Design and Simulation Analysis of Tractor Hydraulic Hitch Detection Loading Test Stand. Chin. Hydraul. Pneum. 2020, 8, 1–16. [Google Scholar]
- Li, W.M. Design and Study on Electro-Hydraulic Loading System of Tractor’s Hitch Test-Bed. Master’s Thesis, Nanjing Agriculture University, Nanjing, China, 2014. [Google Scholar]
- Zhu, Z.X.; Chen, Y.M.; Zhai, Z.Q.; Zhu, S.H.; Mao, E.R. Design of The Profiling Test-bed for Tractor Loading in Hills. J. China Agric. Univ. 2022, 27, 173–185. [Google Scholar]
- Tan, Y.; Xie, B.; E, Z.M. Study of Hydraulic Hitch System Controlling Technology for Tractor Working Units. J. China Agric. Univ. 2002, 7, 64–67. [Google Scholar]
- Tan, Y.; Li, Q.H.; Xie, B.; E, Z.M. Study on an Electrohydraulic Loading System for Indoor Experiment Bench of Tractor Working Units. J. China Agric. Univ. 2001, 6, 67–70. [Google Scholar]
- Han, J.; Yan, X.; Tang, H. Method of Controlling Tillage Depth for Agricultural Tractors Considering Engine Load Characteristics. Biosyst. Eng. 2023, 227, 95–106. [Google Scholar] [CrossRef]
- Zong, J.H.; Wang, L.; Lv, D.X.; Zhang, Q.; Wang, D.M. Research and Test of Tractor’s Three-point Suspension Electro-hydraulic Loading System. J. Agric. Mech. Res. 2024, 46, 242–248. [Google Scholar]
- Ding, W.M. Agricultural Machinery; China Agricultural Press: Beijing, China, 2011. [Google Scholar]
- Vincent, M.; Guillaume, M.; Thibault, D.; Vincent, A.; Jeremy, V. Model Learning of the Tire–road Friction Slip Dependency under Standard Driving Conditions. Control Eng. Pract. 2022, 121, 105048. [Google Scholar]
- Ying, X.D.; Lu, Z.X. Simulation Research on Acceleration Slip Regulation System for Four-Wheel Drive Tractor Using Fuzzy Control Method. Agric. Equip. Veh. Eng. 2010, 12, 6–10. [Google Scholar]
- Liu, Z.X.; Zhang, D.W.; Li, Y.D. Research on Acceleration Slip Regulation System for Four-wheel Drive Vehicle Using Fuzzy Control Method. Trans. Chin. Soc. Agric. Mach. 2005, 12, 21–24. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Name | Model | Key Parameter | |
|---|---|---|---|---|
| 1 | High-pressure ball valve | CJZQ-H10L | Nominal pressure | 32 MPa |
| 2, 4, 5 | Pressure sensor | JP801 | Measuring range | 0–16 Mpa |
| 3 | Accumulator | NXQA-L0.4/20L-A | Nominal pressure | 20 MPa |
| 6 | Switch | CS-7002s | — | — |
| 7 | Pressure gauge | YN60-III | Measuring range | 0–20 Mpa |
| 8 | Suction filter | WF-4B | Filtering precision | 100 um |
| 9 | Oil pump electrical machine | CBN-E316 | Delivery capacity | 16 mL/r |
| Rated speed | 2000 r/min | |||
| 10 | Check valve | YP2-112M-4 | Power | 4 kW |
| 11 | Filter | CVT-04 | Opening pressure | 60 L/min |
| 12 | High-pressure ball valve | ZUI-H40X5DFBP | Filtering precision | 5 um |
| 13 | Proportional relief valve | DBEM10-30B/100 | Working pressure | 10 Mpa |
| 14 | Lifting proportional valve | SP10-20-0-N-00 | Flow rate | 68 L/min |
| 15 | Check valve | CV10-20-0-N-5 | Opening pressure | 0.03 Mpa |
| 16 | Damping | OR9030 Φ0.8 | Pore diameter | 0.8 mm |
| 17 | Pressure-compensated valve | EP10-S35T-0-N-230 | Spring specifications | 1.59 Mpa |
| 18 | Overflow valve | RVD58-20A-0-N-30 | Working pressure | 16 Mpa |
| 19 | Throttle valve | FR08-20F-0-N-M0.4 | Flow rate | 0.4 L/min |
| 20 | Descending proportional valve | SP10-20-0-N-00 | Flow rate | 68 L/min |
| 21 | Lifting cylinder | Φ100 × 200 | — | — |
| Name | Model | Range | Supply Voltage | Output Signal | Precision |
|---|---|---|---|---|---|
| Force sensor | JHZX-2.5t | 25 kN | 24VDC | 4~20 mA | 0.1%F·S |
| Pressure sensor | JP801 | 16 MPa | 24VDC | 4~20 mA | 0.1%F·S |
| Angular displacement sensor | PandAuto-P3036 | 90° | 5VDC | 0–5 V | 0.3%F·S |
| Number | Name | Model | Key Parameter | |
|---|---|---|---|---|
| 1 | High-pressure ball valve | CJZQ-H10L | Nominal pressure | 32 MPa |
| 2, 4, 17 | Pressure sensor | JP801 | Measuring range | 0–16 Mpa |
| 3 | Accumulator | NXQA-L0.4/20L-A | nominal pressure | 20 MPa |
| 5 | Level meter | YWZ-200T | — | — |
| 6 | Switch | CS-7002s | — | — |
| 7 | Pressure gauge | YN60-III | Measuring range | 0–20 Mpa |
| 8 | Air filter | EF3-40 | Filtering precision | 0.279 mm |
| 9 | Suction filter | WF-4B | Filtering precision | 100 um |
| 10 | Oil pump Electrical machine | CBN-E310 | Delivery capacity | 16 mL/r |
| Rated speed | 2000 r/min | |||
| 11 | Check valve | YP2-100L1-4 | Power | 2.2 kW |
| 12 | Filter | CVT-04 | Maximum flow rate | 60 L/min |
| 13 | Proportional relief valve | ZUI-H40X5DFBP | Filtering precision | 5 um |
| 14 | Safety valve | DBEM10-30B/100 | Working pressure | 10 Mpa |
| 15 | Magnetic exchange valve | DBDH10P10/25 | Maximum pressure of P port | 63 Mpa |
| Maximum pressure of T port | 31.5 Mpa | |||
| 16 | Oil pump Electrical machine | 4WE10FA20B | Working pressure | 31.5 Mpa |
| Flow rate | 100 L/min | |||
| 18 | Check valve | Φ63 × 350 | — | — |
| Parameter | Units | Value |
|---|---|---|
| Total dimension (length × width × height) | mm | 2450 × 1200 × 1600 |
| Matching tractor power | kW | 51.5~73.5 |
| Peak traction | KN | 25 |
| Maximum oil pressure | MPa | 16 |
| Flow rate | L/min | 60 |
| Adjustment range of tillage depth | mm | 0~250 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Song, Y.; Wang, Y.; Qian, J.; Lu, Z.; Wang, T. Design and Test of a Tractor Electro-Hydraulic-Suspension Tillage-Depth and Loading-Control System Test Bench. Agriculture 2023, 13, 1884. https://doi.org/10.3390/agriculture13101884
Sun X, Song Y, Wang Y, Qian J, Lu Z, Wang T. Design and Test of a Tractor Electro-Hydraulic-Suspension Tillage-Depth and Loading-Control System Test Bench. Agriculture. 2023; 13(10):1884. https://doi.org/10.3390/agriculture13101884
Chicago/Turabian StyleSun, Xiaoxu, Yue Song, Yunfei Wang, Jin Qian, Zhixiong Lu, and Tao Wang. 2023. "Design and Test of a Tractor Electro-Hydraulic-Suspension Tillage-Depth and Loading-Control System Test Bench" Agriculture 13, no. 10: 1884. https://doi.org/10.3390/agriculture13101884