
Design of Hydrostatic Chassis Drive System for Large Plant Protection Machine

Abstract
:1. Introduction
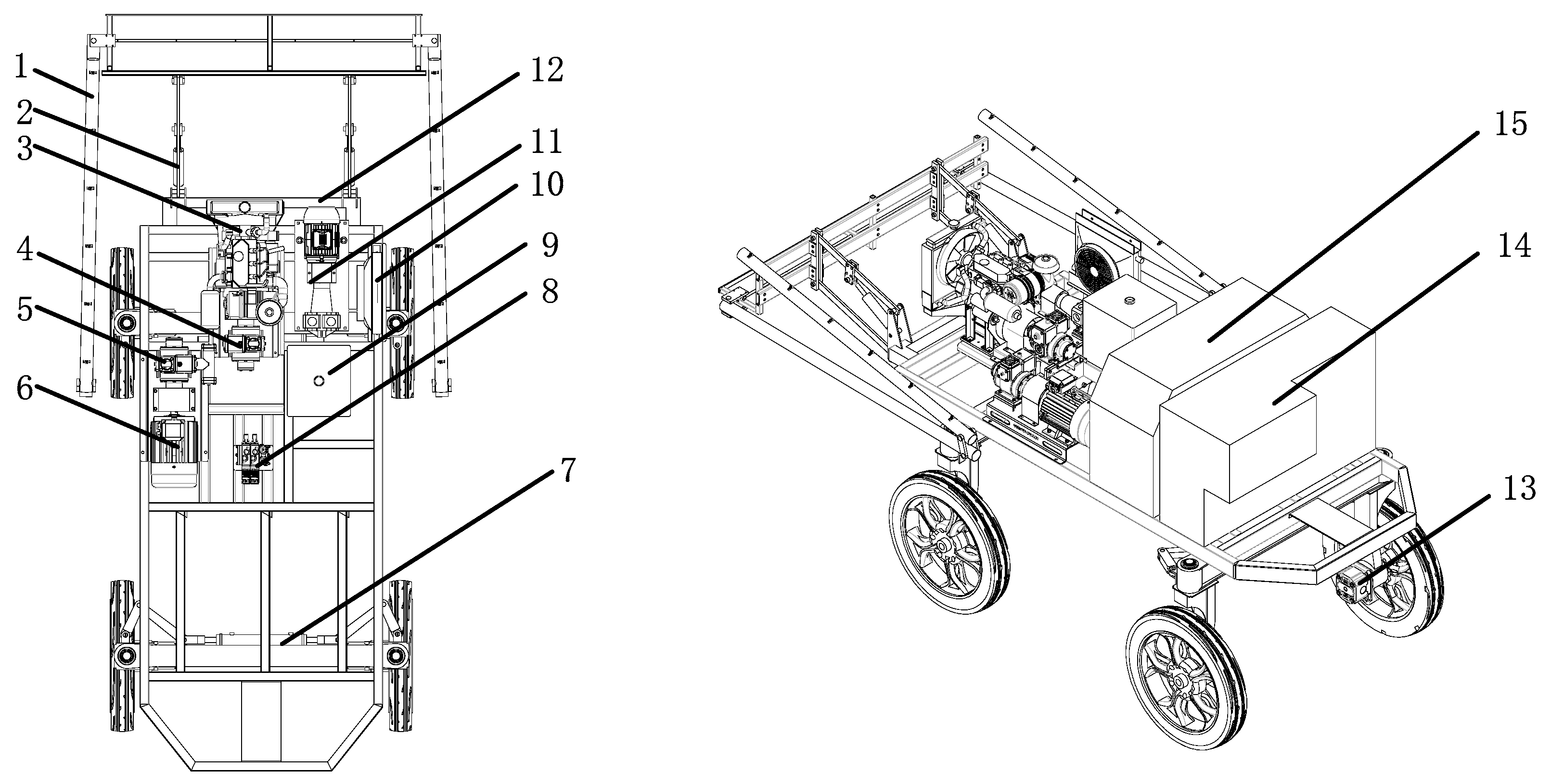
2. Design of Hydraulic Chassis Structure and Scheme
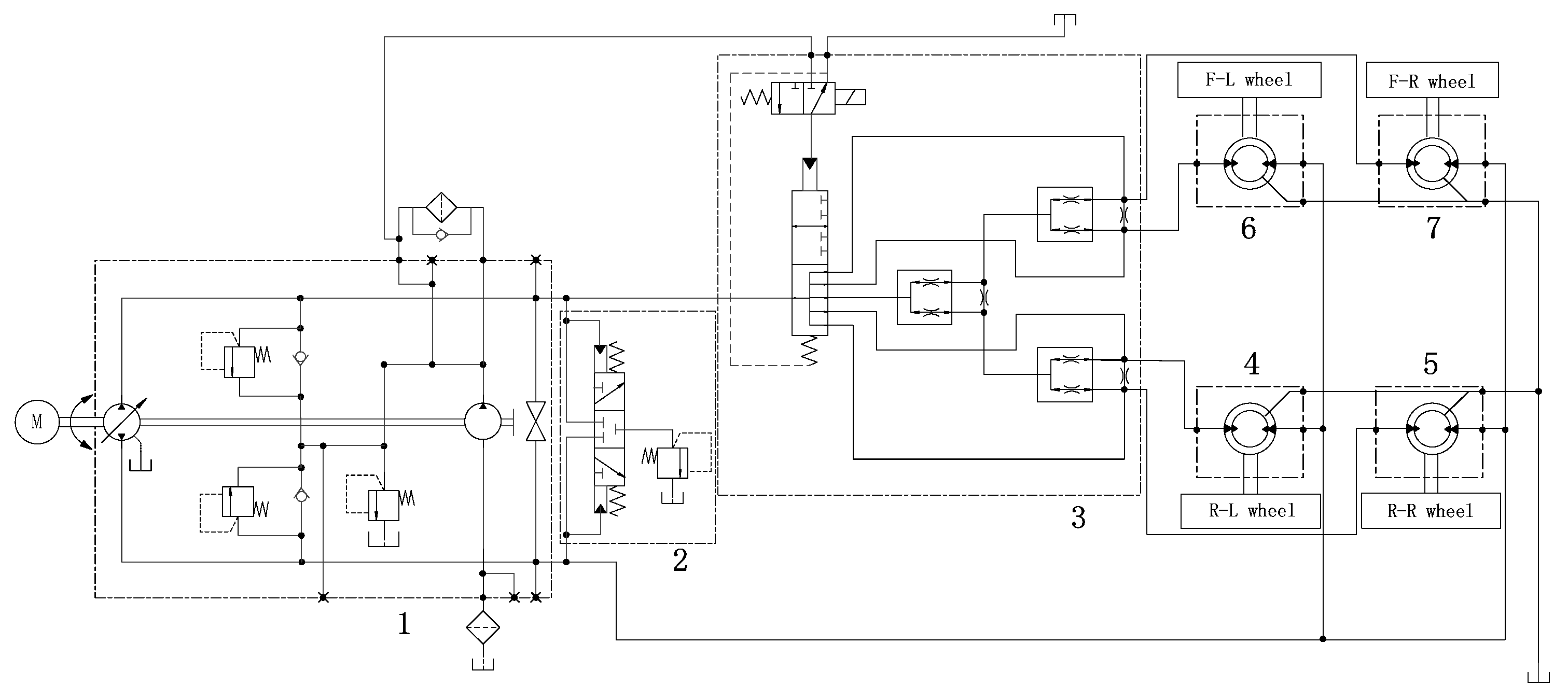
2.1. Design of the Hydraulic System
2.2. Calculation and Selection of Hydraulic System
2.2.1. Calculation of Hydraulic System
2.2.2. Selection of Hydraulic Motor
2.2.3. Selection of Hydraulic Pump
3. Simulation of the Walking Hydraulic System
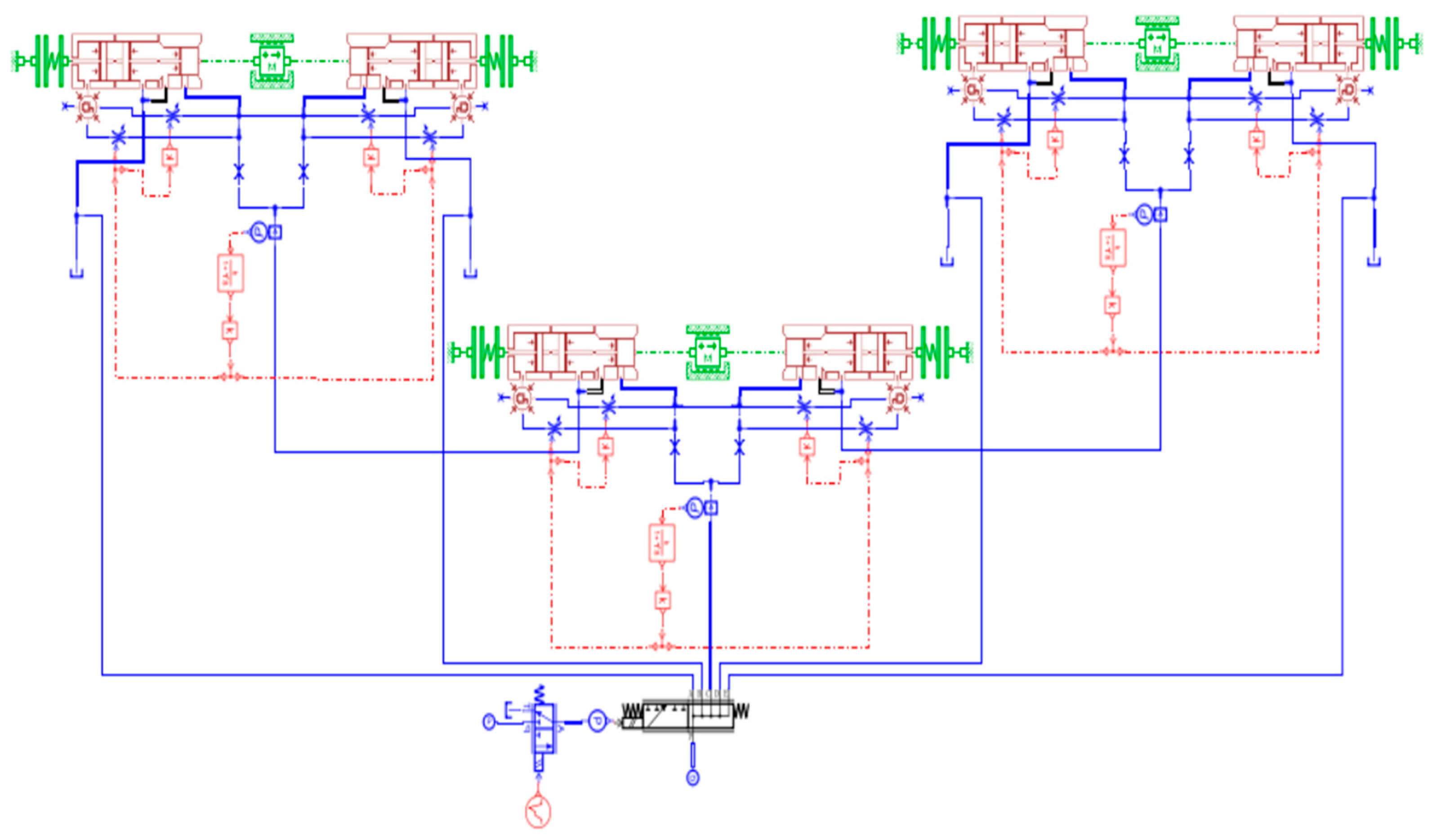
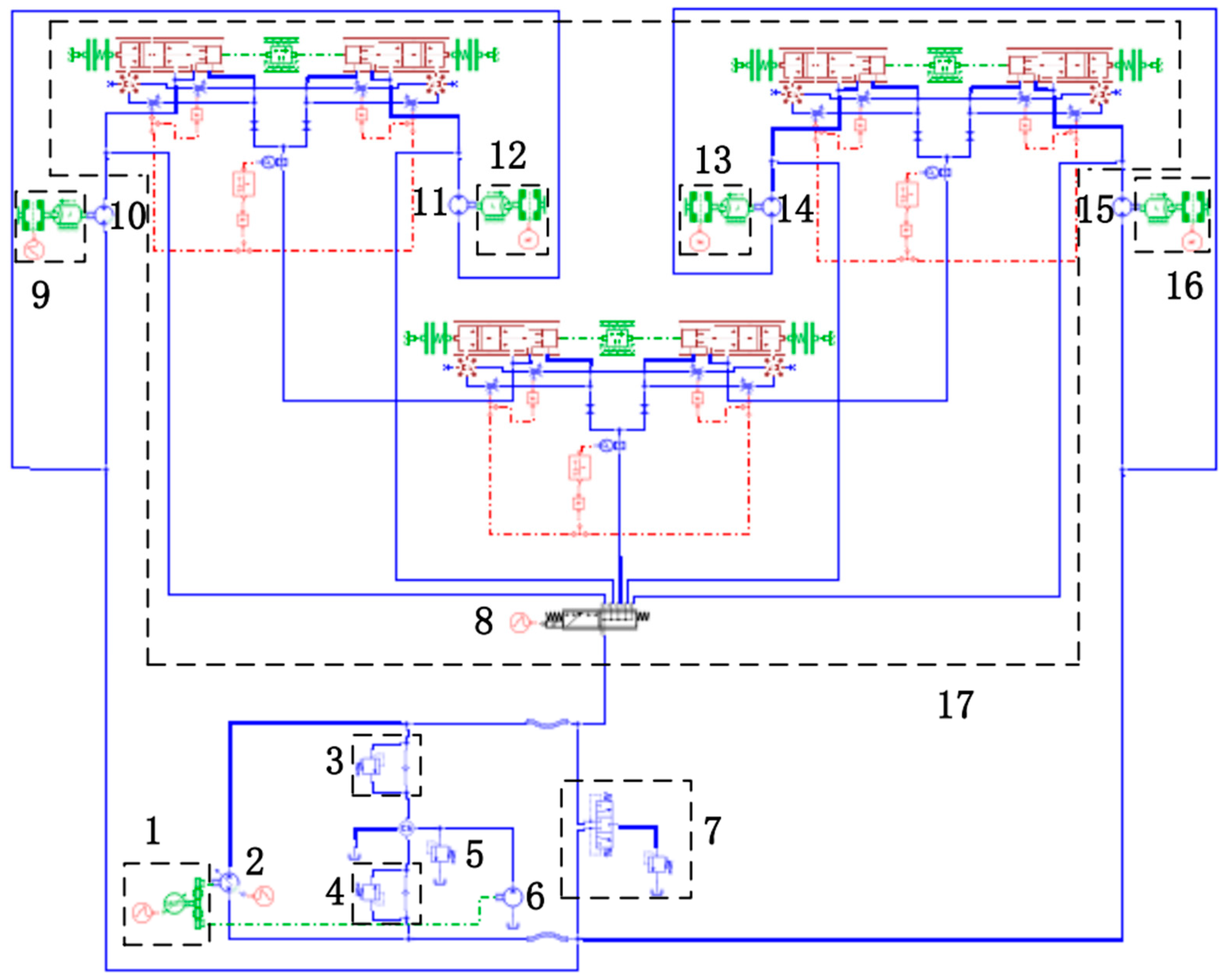
3.1. Establishment of Hydraulic System Simulation Model
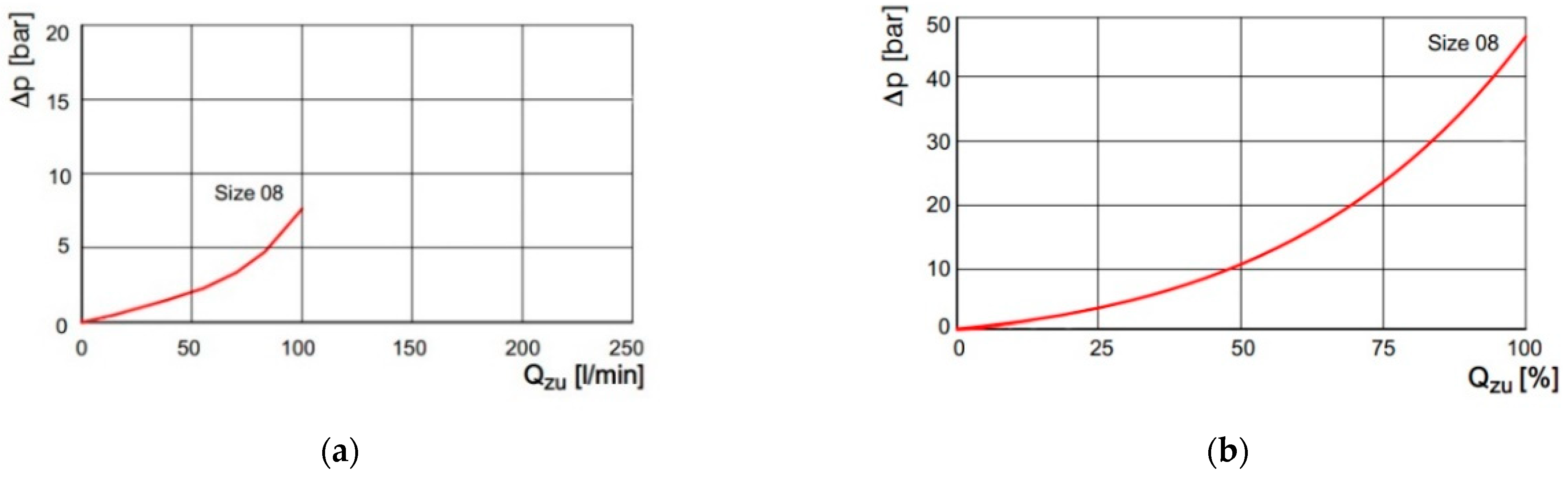
3.1.1. Establishment of the Diverter Valve
3.1.2. Establishment of Simulation Model of Walking Hydraulic System
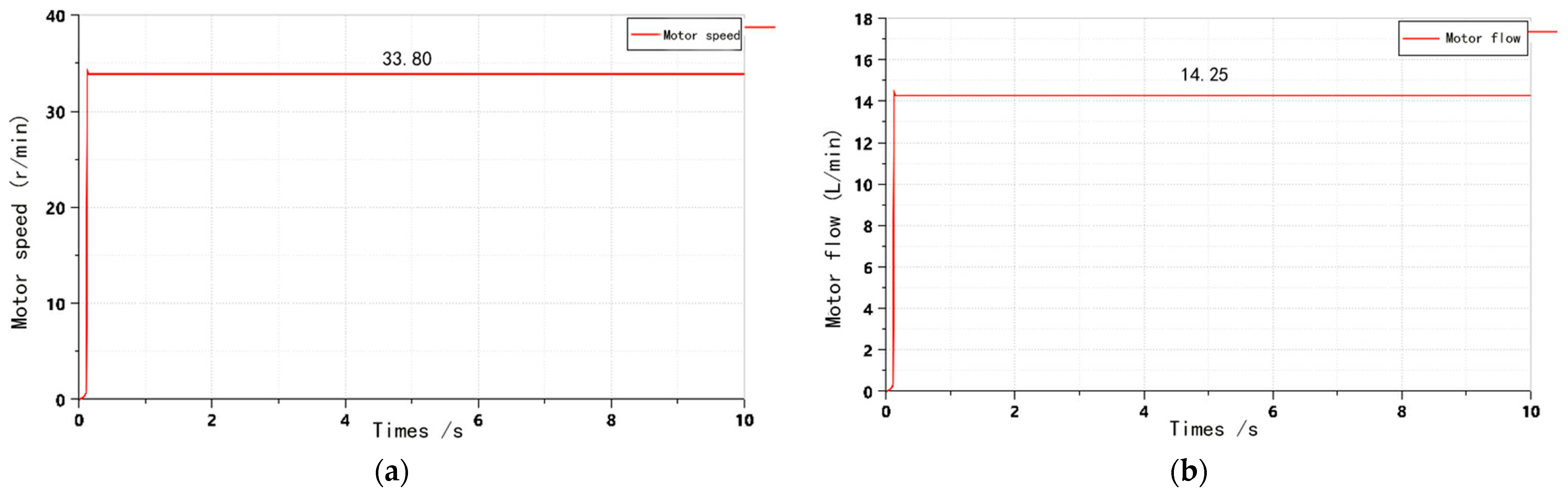
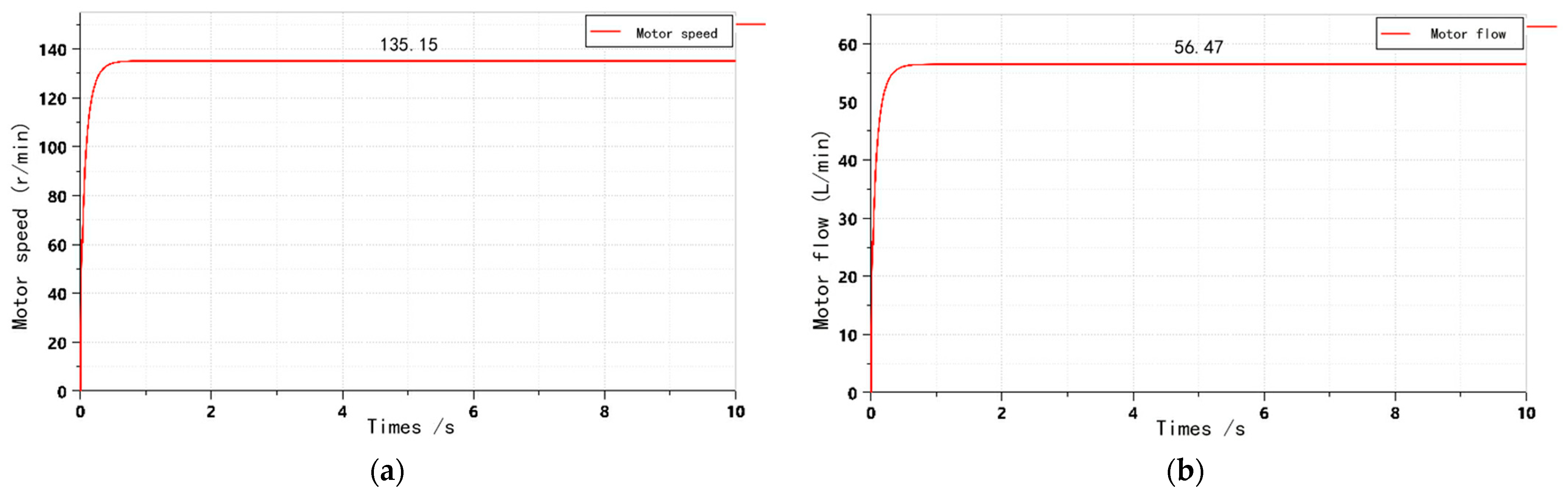
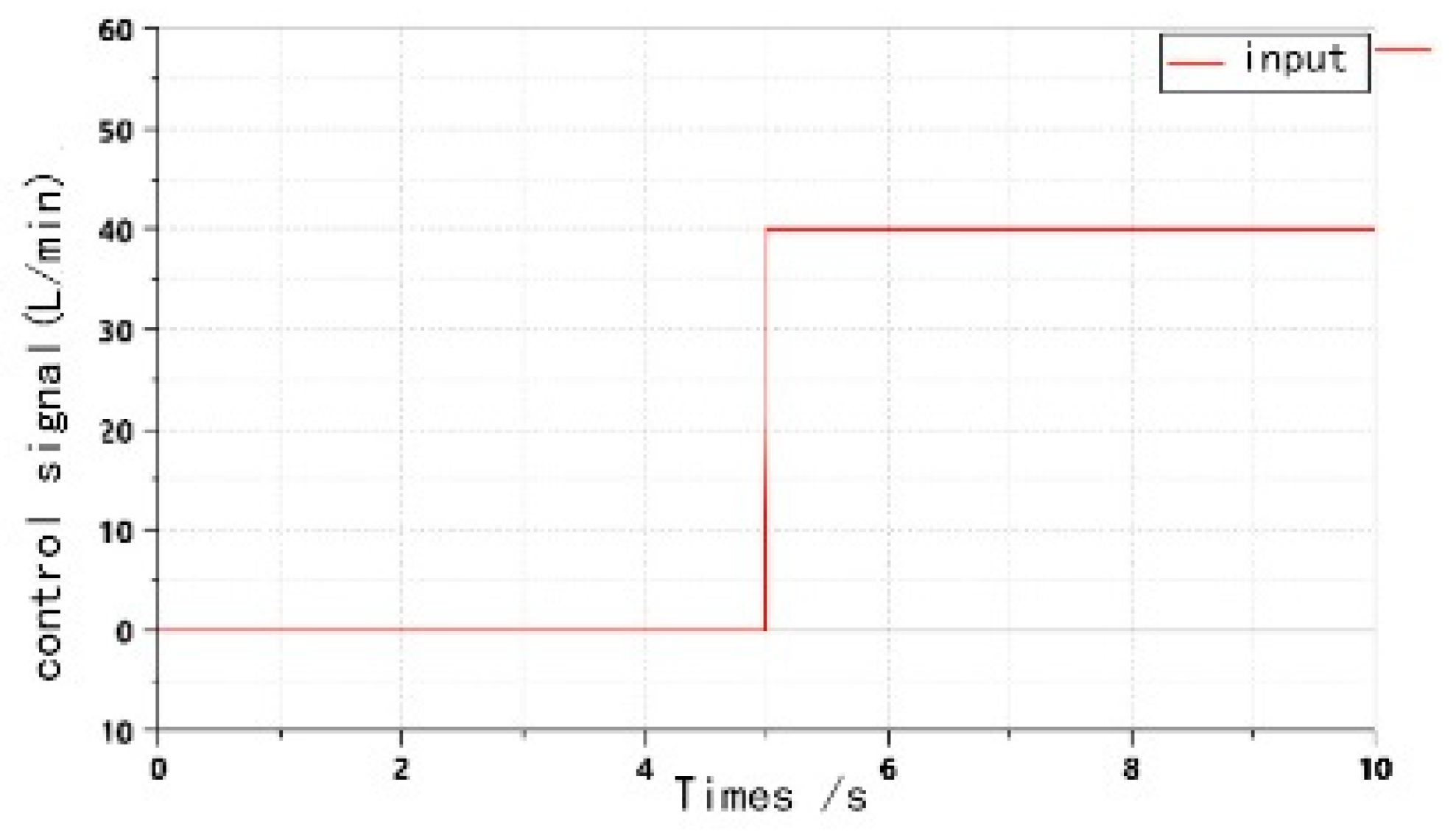
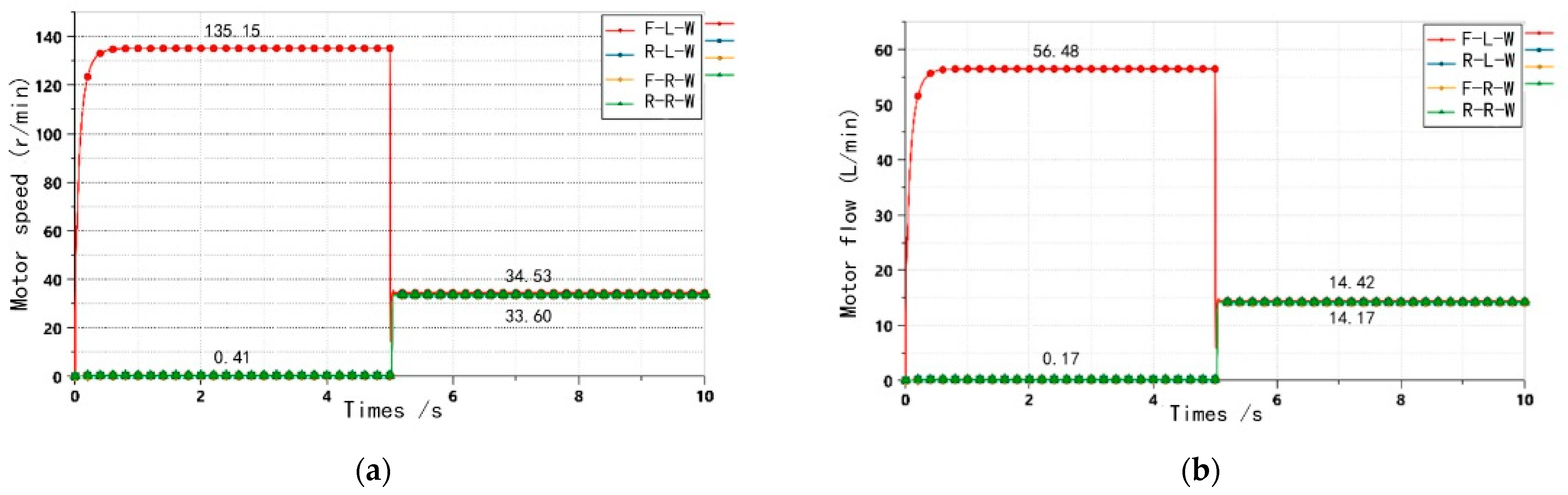
3.2. Analysis of Simulation Conditions
4. Experimental Design and Analysis
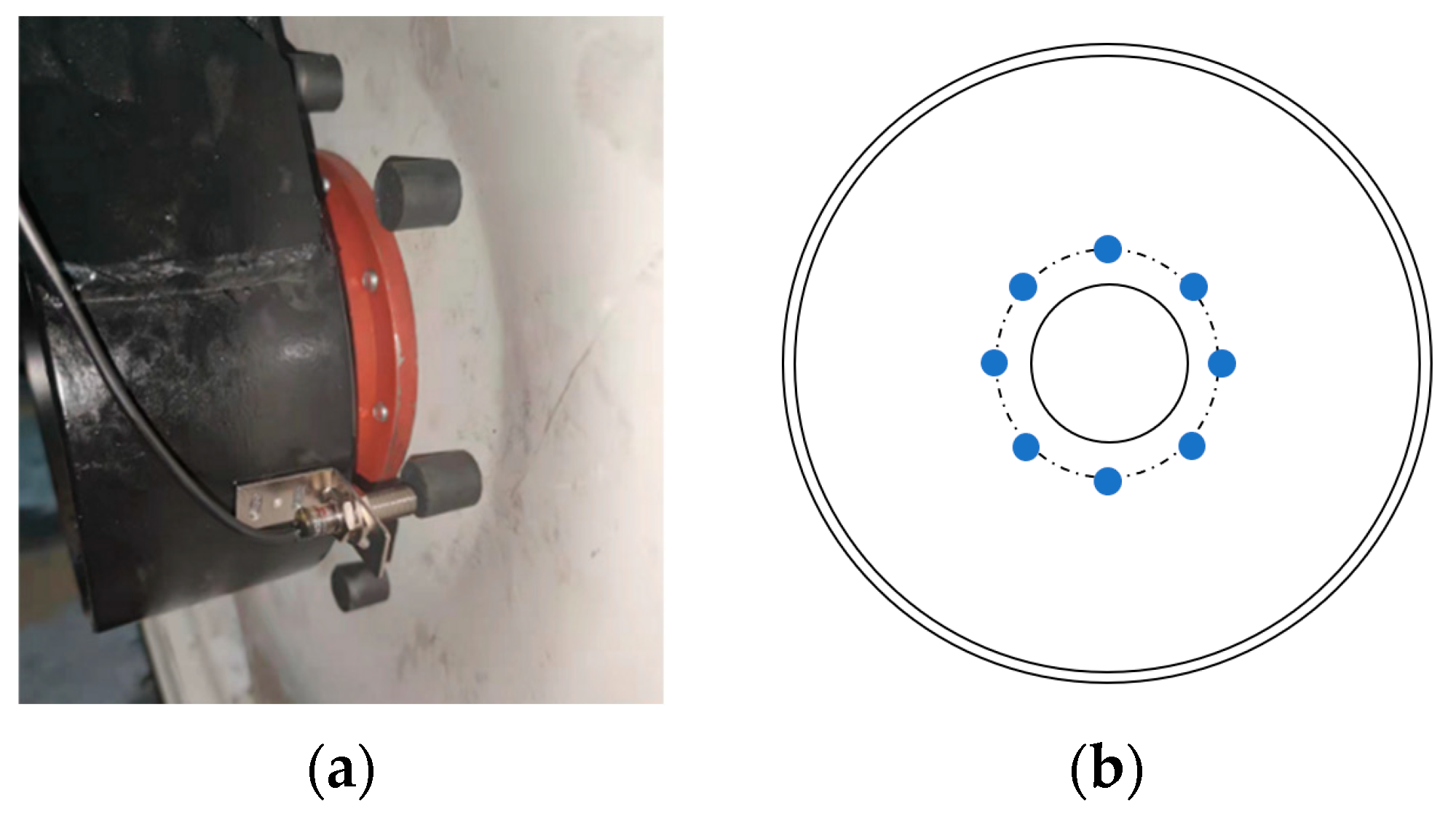
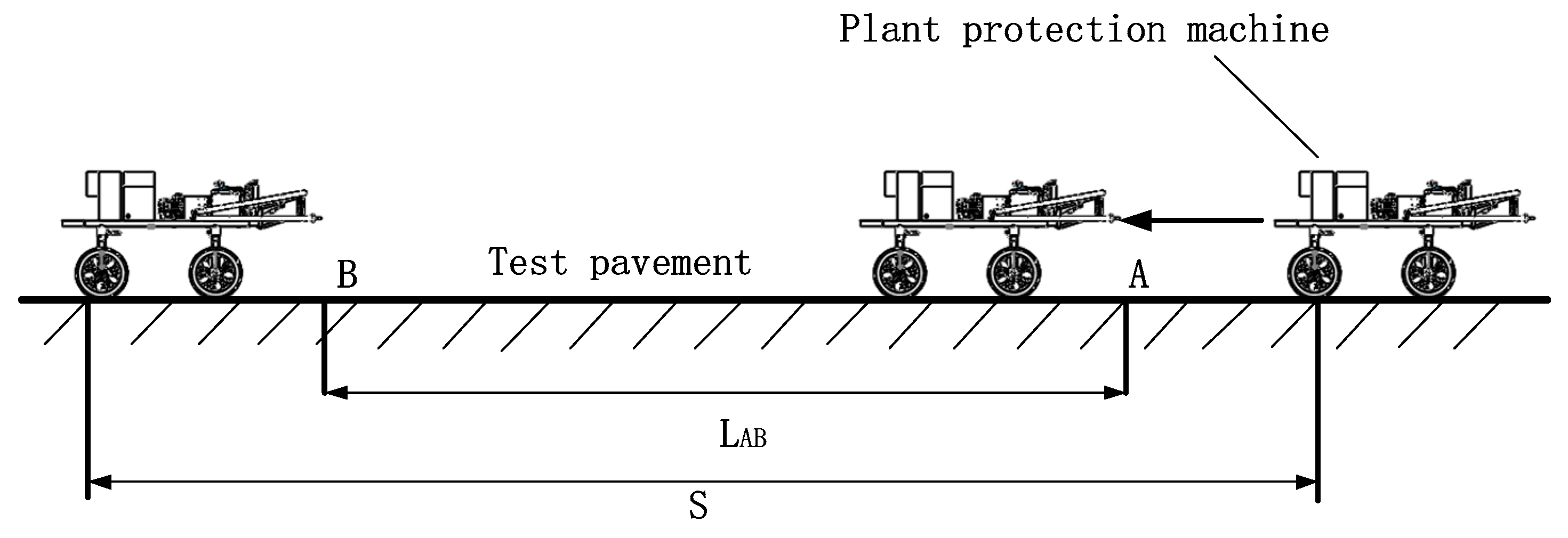
4.1. Theoretical Driving Distance Measuring Device
4.2. Test Plan and Result Analysis
4.2.1. The Diverter Valve Is Closed
4.2.2. The Diverter Valve Is Opened
5. Discussion
5.1. Comparison between Four Wheel Drive and Two Wheel Drive
5.2. The Diverter Valve Is Compared with the Synchronous Motor
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, S. Application and advantage analysis of hydraulic system in agricultural mechanization. Anhui Agric. Sci. 2014, 20, 6872–6873. [Google Scholar]
- Hu, K.; Zhang, W.; Qi, B.; Minutes.; Li, K.; Yan, W. Application and development of hydraulic chassis in the field of agricultural machinery. Jiangsu Agric. Sci. 2019, 47, 259–263. [Google Scholar]
- Zhang, X. Review of the development of hydraulic technology for mobile machinery at home and abroad. Fluid Transm. Control 2017, 3, 1–11. [Google Scholar]
- Zhang, L. The application of hydrostatic drive system in the field of agricultural machinery. Hydraul. Pneum. Seal. 2014, 34, 78–80. [Google Scholar]
- Kumar, S.; Tewari, V.; Bharti, C.K.; Ranjan, A. Modeling, simulation and experimental validation of flow rate of electro-hydraulic hitch control valve of agricultural tractor. Flow Meas. Instrum. 2021, 82, 102070. [Google Scholar] [CrossRef]
- Hong, Y.; Zhang, X. Design and analysis of hydraulic chassis with obstacle avoidance function. IOP Conf. Ser. Mater. Sci. Eng. 2017, 224, 012005. [Google Scholar] [CrossRef] [Green Version]
- Axin, M.; Eriksso, B.; Krus, P. A flexible working hydraulic system for mobile machines. Int. J. Fluid Power 2016, 17, 79–89. [Google Scholar] [CrossRef]
- Li, R.; Cheng, Y.; Xu, J.; Li, Y.; Ding, X.; Zhao, S. Research on on-line monitoring system of hydraulic actuator of combine harvester. Processes 2022, 10, 35. [Google Scholar] [CrossRef]
- Shyrokau, B.D.; Winter, J.; Stroosma, O.; Dijksterhuis, C.; Loof, J.; van Paassen, R.; Happee, R. The effect of steering-system linearity, simu-lator motion, and truck driving experience on steering of an articulated tractor-semitrailer combination. Appl. Ergon. 2018, 71, 17–28. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T.; Kominiak, D.; Nyberg, R. Design and experimental evaluation of a novel sliding mode controller for an articulated vehicle. Robot. Auton. Syst.-Tems 2018, 103, 213–221. [Google Scholar] [CrossRef]
- Gonzalez, D.O.; Martin-Gorriz, B.; Berrocal, I.I.; Hernandez, B.M.; Garcia, F.C.; Sanchez, P.M. Development of an automatically deployable roll over protective structure for agricultural tractors based on hydraulic power: Prototype and first tests. Comput. Electron. Agric. 2016, 124, 46–54. [Google Scholar] [CrossRef]
- Wang, Y. Development of hydraulic drive technology for mobile machinery. Hydraul. Pneum. Seal. 2000, 3, 1–6. [Google Scholar]
- Zhao, J.; Xu, L.; Zhang, J.; Zhao, X. Research and application status of hydrostatic drive technology for off-road vehicles. Tract. Agric. Transp. Veh. 2018, 45, 8–13. [Google Scholar]
- Sun, Y.; Zhang, H.; Yang, J. The structure principle and dynamic characteristics of mechanical-electric-hydraulic dynamic coupling drive system and its application in electric vehicle. Electronics 2022, 11, 1601. [Google Scholar] [CrossRef]
- Minav, T.A.; Laurila, L.I.; Pyrh, J.J. Analysis of electro-hydraulic lifting system’s energy efficiency with direct electric drive pump control. Autom. Constr. 2013, 30, 144–150. [Google Scholar] [CrossRef]
- Jiang, Z.; Xia, C. Research on the characteristics of tractor hydrostatic transmission system. Agric. Mech. Res. 2021, 43, 249–254. [Google Scholar]
- He, L.; Chen, Z.; Zhou, H. Design of hydrostatic chassis of crawler harvester. Mod. Agric. Equip. 2017, 3, 26–28+33. [Google Scholar]
- Li, J.; Li, S.; Zhang, Y.; Wu, H.; Liu, M.; Gao, Z. Design of hydraulic drive system of mountain orchard conveyor. J. Anhui Agric. Univ. 2021, 48, 143–149. [Google Scholar]
- Nie, Y.; Wu, Y.; Li, C.; Xu, W. Design and test of hydraulic chassis of high ground clearance sprayer. Nanfang Agric. Mach. 2020, 51, 10–12. [Google Scholar]
- Hu, K.; Zhang, W.; Liu, H.; Li, K. Design and simulation of hydraulic drive system for hilly and mountain tractor. Mach. Tool Hydraul. 2021, 49, 93–97. [Google Scholar]
- Mononen, T.; Mattila, J. Flow-bounded velocity controller for hydraulic bulldozers. Energies 2022, 15, 4027. [Google Scholar] [CrossRef]
- Mo, S. Cross-border mergers and acquisitions in the agricultural machinery industry—The fifth in a series of big talk about agricultural machinery. Agric. Mach. 2013, 25, 22–23. [Google Scholar]
- Liu, Z. Design and Simulation Study of Hydraulic System of High Ground Clearance Plant Protection Machine; Hunan Agricultural University: Changsha, China, 2020. [Google Scholar]
- Zheng, W.; Zhao, T.; Dang, B.; Li, S. Research on the control of hydraulic driving system of cleaning vehicle based on fuzzy PID. Electromech. Technol. 2018, 4, 84–87+113. [Google Scholar]
- Wu, Q. New trends in the development of foreign combine harvester technology. Contemp. Agric. Mach. 2014, 10, 50–51. [Google Scholar]
- Liu, X.; Yang, M.; Chen, W. Design of four-wheel independent drive hydraulic power system for logging machinery. For. Mach. Woodwork. Equip. 2019, 47, 14–16. [Google Scholar]
- Hu, K.; Zhang, W.; Yu, S.; Qi, B. Minutes. Design and research of full hydraulic chassis drive system for high-speed rice transplanter. Mod. Manuf. Eng. 2018, 10, 141–145. [Google Scholar]
- Fan, X.; Wei, X. Design of automatic driving system for four-wheel steering hydraulic chassis. Agric. Mech. Res. 2017, 39, 253–258. [Google Scholar]
- Wang, G.; Song, Y.; Wang, J.; Chen, W.; Cao, Y.; Wang, J. Study on the Shifting Quality of the CVT Tractor under Hydraulic System Failure. Appl. Sci. 2020, 10, 681. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Zhang, Q.; Qing, R. A dual-pump combined frequency conversion hydraulic speed control system. Mach. Tool Hydraul. 2022, 50, 100–103. [Google Scholar]
- Zhao, L.; Deng, N.; Luo, N.; Liu, X. Sliding mode control of four-wheel steering. J. South China Univ. Technol. 2015, 43, 69–74+81. [Google Scholar]
- Xia, C.; Luo, G. Design and analysis of full hydraulic four-wheel steering system of sprayer. J. Chongqing Univ. Technol. 2016, 30, 65–70. [Google Scholar]
- Yang, M. Study on the Digital hydraulic driving system of the belt conveyor. Machines 2022, 10, 417. [Google Scholar] [CrossRef]
- Zhu, Z.; Yang, Y.; Wang, D.; Cai, Y.; Lai, L. Energy saving performance of agricultural tractor equipped with mechanic-electronic-hydraulic powertrain system. Agriculture 2022, 12, 436. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Main Parameters | Numerical Value |
|---|---|
| Overall size (mm) | 3050 × 1350 × 2000 |
| Machine working weight whole machine (kg) | 2000 |
| Minimum turning radius (m) | 4.5 |
| Drive wheel radius (m) | 0.4 |
| Field work speed (km/h) | 3~6 |
| Travel maximum speed (km/h) | 10 |
| Pavement Type | Feature | Rolling Resistance Coefficient | Adhesion Coefficient |
|---|---|---|---|
| Concrete pavement | Hard road | 0.010~0.020 | 0.8~0.9 |
| Compact dirt road | Firm road | 0.025~0.015 | 0.5~0.65 |
| Dry fields | Hard ground | 0.150~0.200 | 0.6~0.7 |
| Cultivate the land | Soft land | 0.100~0.250 | 0.5~0.7 |
| Characteristic | Parameter |
|---|---|
| Equivalent displacement (mL/r) | 417.3 |
| Maximum working pressure (MPa) | 21 |
| Maximum flow (L/min) | 20.7 |
| Maximum output speed (r/min) | 49.6 |
| Maximum output torque (N·m) | 1396 |
| Characteristic | Parameter |
|---|---|
| Displacement (mL/r) | 20 |
| Maximum pressure (MPa) | 34.5 |
| Rated speed (r/min) | 4000 |
| Maximum speed (r/min) | 4500 |
| Weight (kg) | 12 |
| The Main Parameters | Numerical Value |
|---|---|
| Engine rated speed (r/min) | 3000 |
| Variable displacement piston pump (mL/r) | 20 |
| Charge pump displacement (mL/r) | 4.3 |
| Wheel side hydraulic motor maximum load torque (N·m) | 980 |
| Wheel side hydraulic motor displacement (mL/r) | 417.3 |
| Shunt valve control current (mA) | 40 |
| High pressure relief valve pressure (bar) | 300 |
| Charge relief valve pressure (bar) | 7 |
| Speed | Group | Actual Driving Distance (m) | Theoretical Driving Distance (m) | Slip Rate (%) | Average Slip (%) |
|---|---|---|---|---|---|
| 3 km/h | 1 | 39.85 | 41.37 | 3.68 | 3.79 |
| 2 | 39.54 | 41.15 | 3.92 | ||
| 3 | 39.64 | 41.59 | 4.69 | ||
| 4 | 39.33 | 40.93 | 3.92 | ||
| 5 | 39.59 | 40.71 | 2.76 | ||
| 6 km/h | 1 | 39.46 | 42.25 | 6.60 | 6.17 |
| 2 | 38.92 | 42.02 | 7.39 | ||
| 3 | 39.24 | 41.59 | 5.65 | ||
| 4 | 39.88 | 42.47 | 6.09 | ||
| 5 | 39.67 | 41.81 | 5.11 |
| Speed | Group | Actual Driving Distance (m) | Theoretical Driving Distance (m) | Slip Rate (%) | Average Slip (%) |
|---|---|---|---|---|---|
| 3 km/h | 1 | 39.01 | 39.40 | 0.09 | 1.33 |
| 2 | 38.95 | 39.62 | 1.69 | ||
| 3 | 39.23 | 39.83 | 1.53 | ||
| 4 | 39.84 | 40.28 | 1.08 | ||
| 5 | 39.51 | 40.05 | 1.37 | ||
| 6 km/h | 1 | 39.26 | 40.27 | 2.52 | 2.70 |
| 2 | 38.84 | 40.05 | 3.04 | ||
| 3 | 39.41 | 40.50 | 2.68 | ||
| 4 | 38.68 | 39.84 | 2.91 | ||
| 5 | 39.77 | 40.71 | 2.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Li, C.; Zhao, C.; Li, L.; Gao, G.; Chen, X. Design of Hydrostatic Chassis Drive System for Large Plant Protection Machine. Agriculture 2022, 12, 1118. https://doi.org/10.3390/agriculture12081118
Zhang C, Li C, Zhao C, Li L, Gao G, Chen X. Design of Hydrostatic Chassis Drive System for Large Plant Protection Machine. Agriculture. 2022; 12(8):1118. https://doi.org/10.3390/agriculture12081118
Chicago/Turabian StyleZhang, Chengliang, Changpu Li, Chunzhao Zhao, Lei Li, Guanlei Gao, and Xiyuan Chen. 2022. "Design of Hydrostatic Chassis Drive System for Large Plant Protection Machine" Agriculture 12, no. 8: 1118. https://doi.org/10.3390/agriculture12081118