
Parameters Optimization and Test of Caterpillar Self-Propelled Tiger Nut Harvester Hoisting Device

Abstract
:1. Introduction
2. Materials and Methods
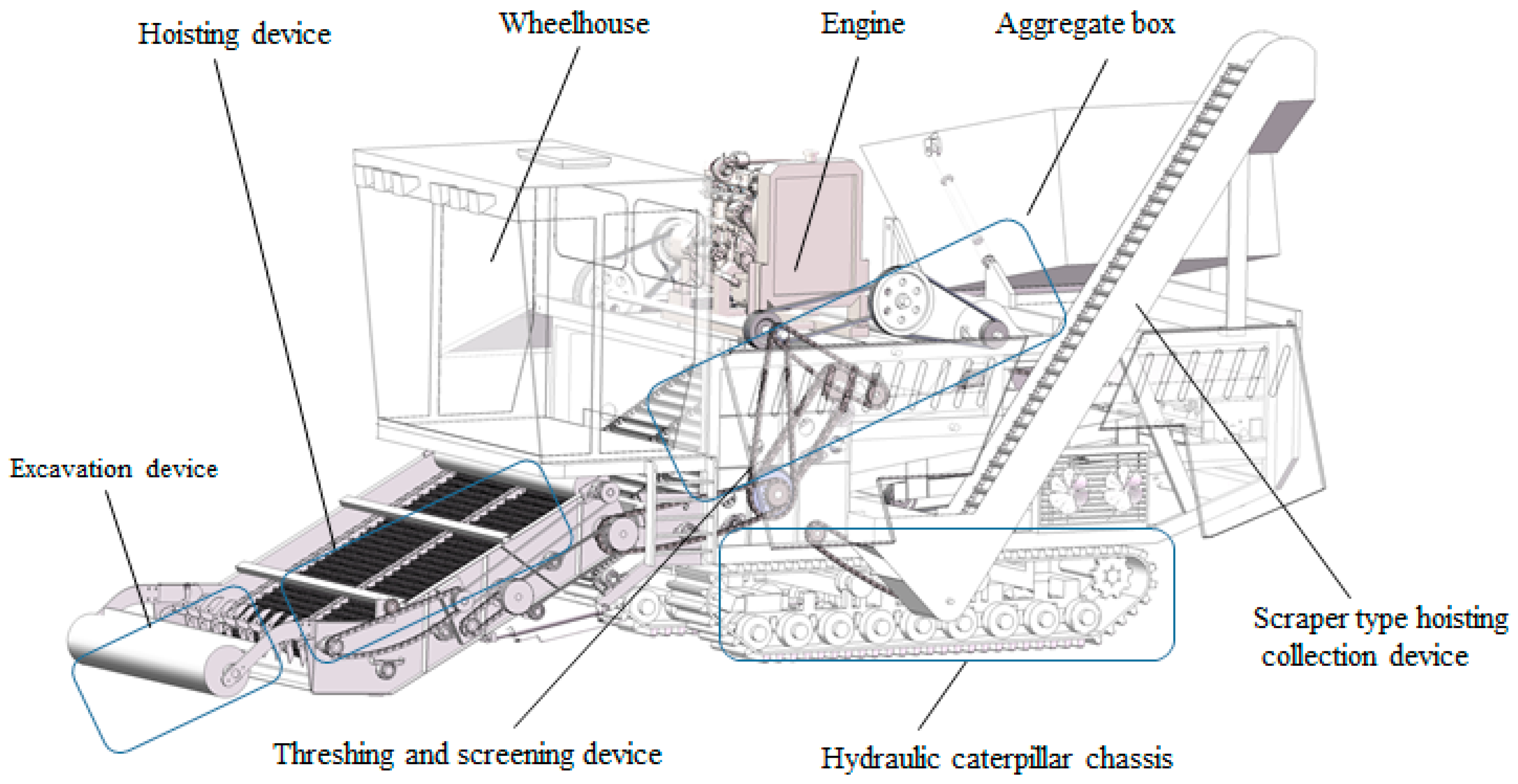
2.1. Overall Structure and Working Principle of CSTH
2.2. Working Principle of CSTH
2.3. Design of Hoisting Device
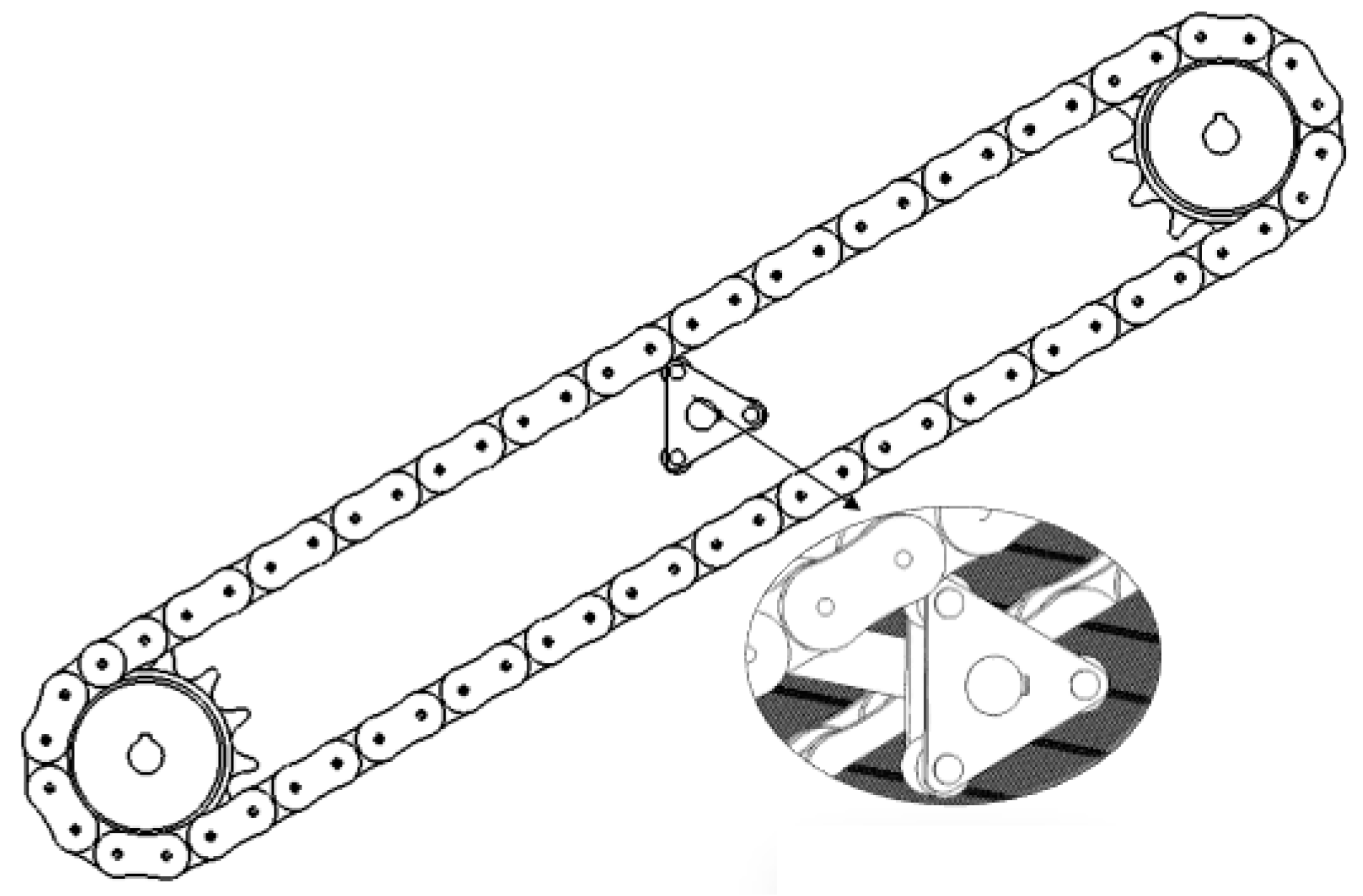
2.3.1. Structural Form of Hoisting Chain Structure
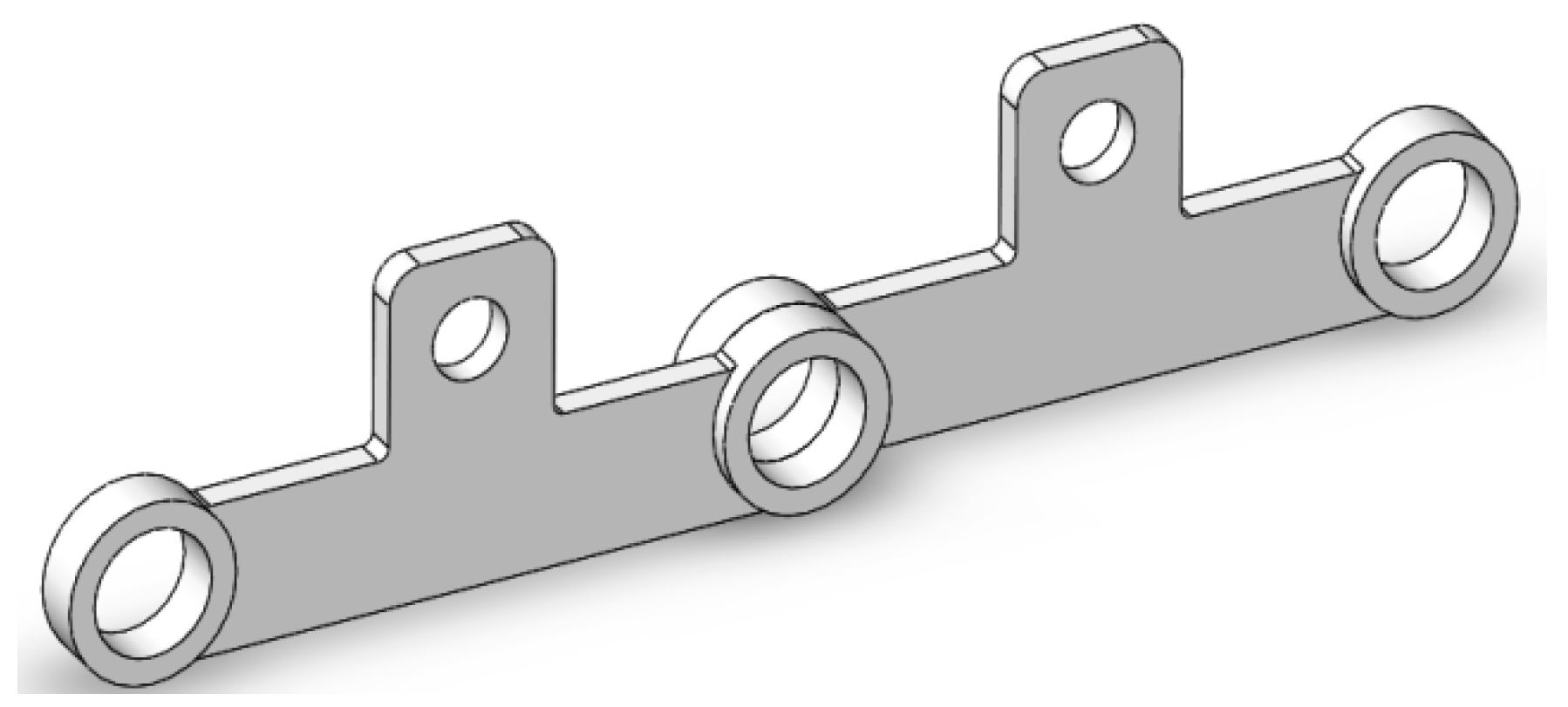
2.3.2. Design of Vibratory Sieving Plates
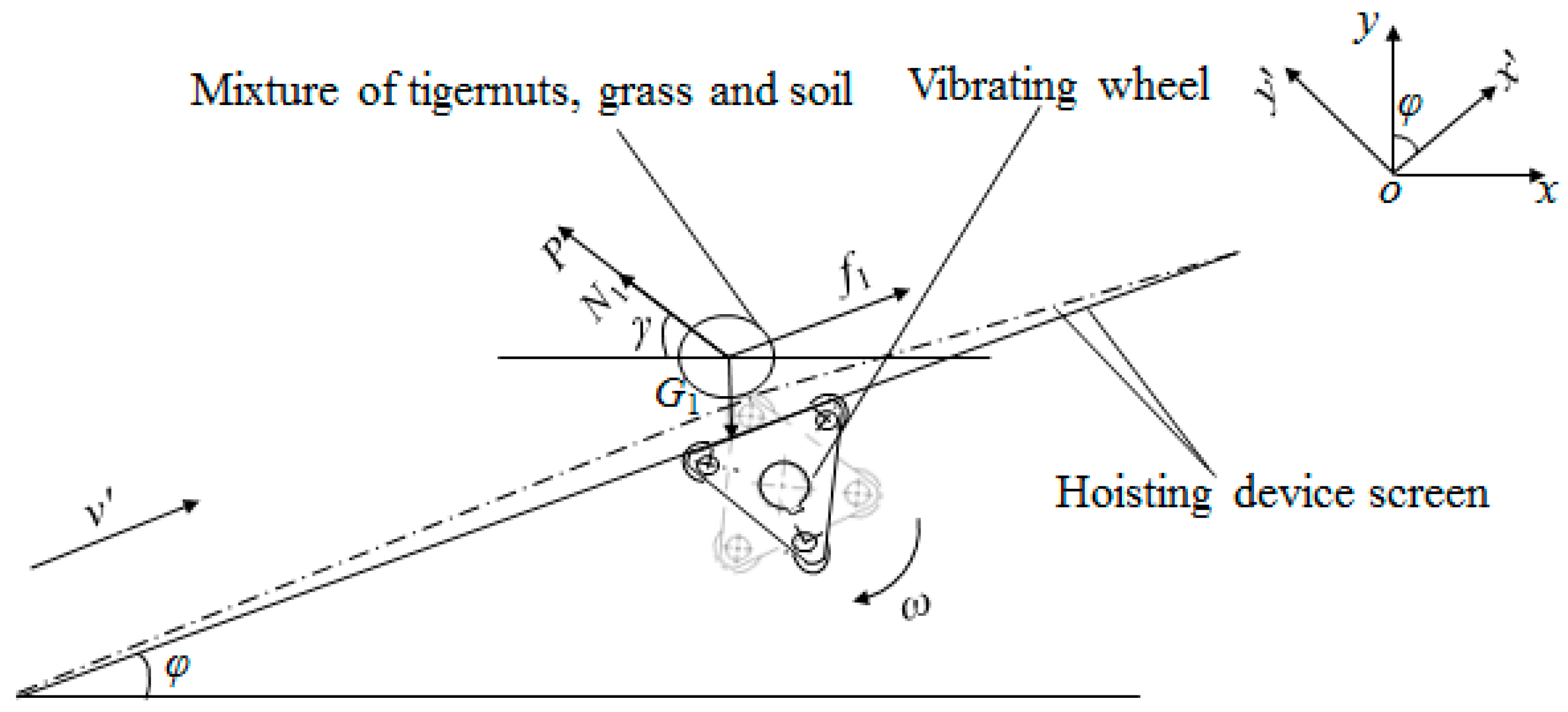
2.3.3. Structural Design of Vibrating Wheels
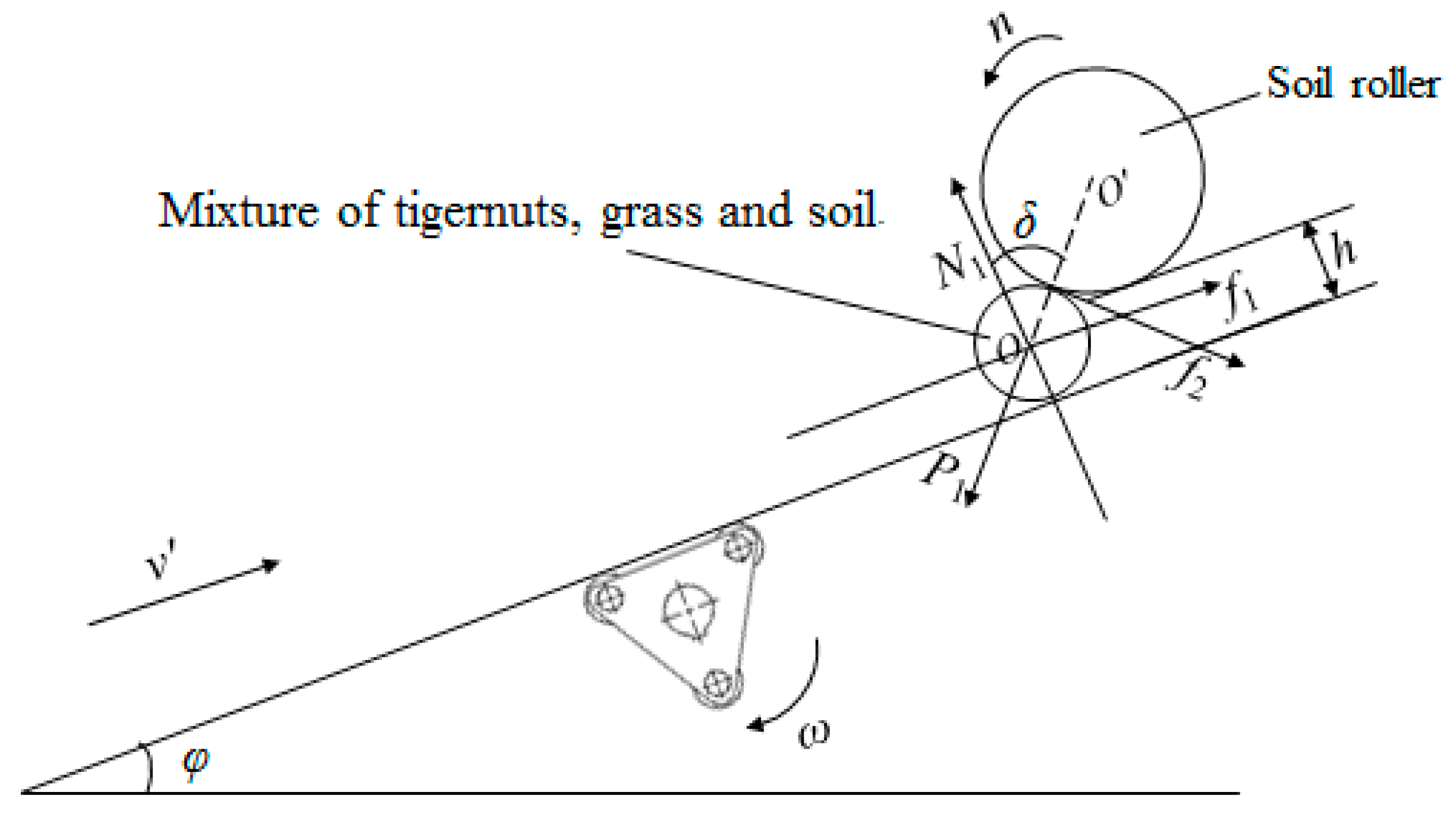
2.3.4. Design of a Soil Roller
2.3.5. Motion Parameter Setting of the Combined-Type Hoisting Sieve
2.4. Simulation Experiments of the Hoisting Device
2.4.1. Establishment of Simulation Model
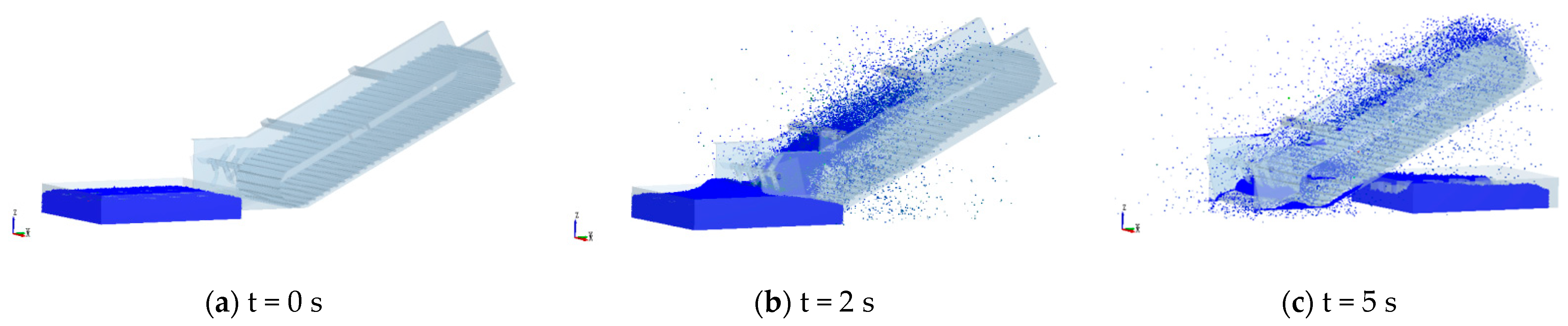
2.4.2. Simulation Test Process
2.4.3. Quadratic Orthogonal Rotation Combination Design Testing
2.4.4. Optimal Parameters
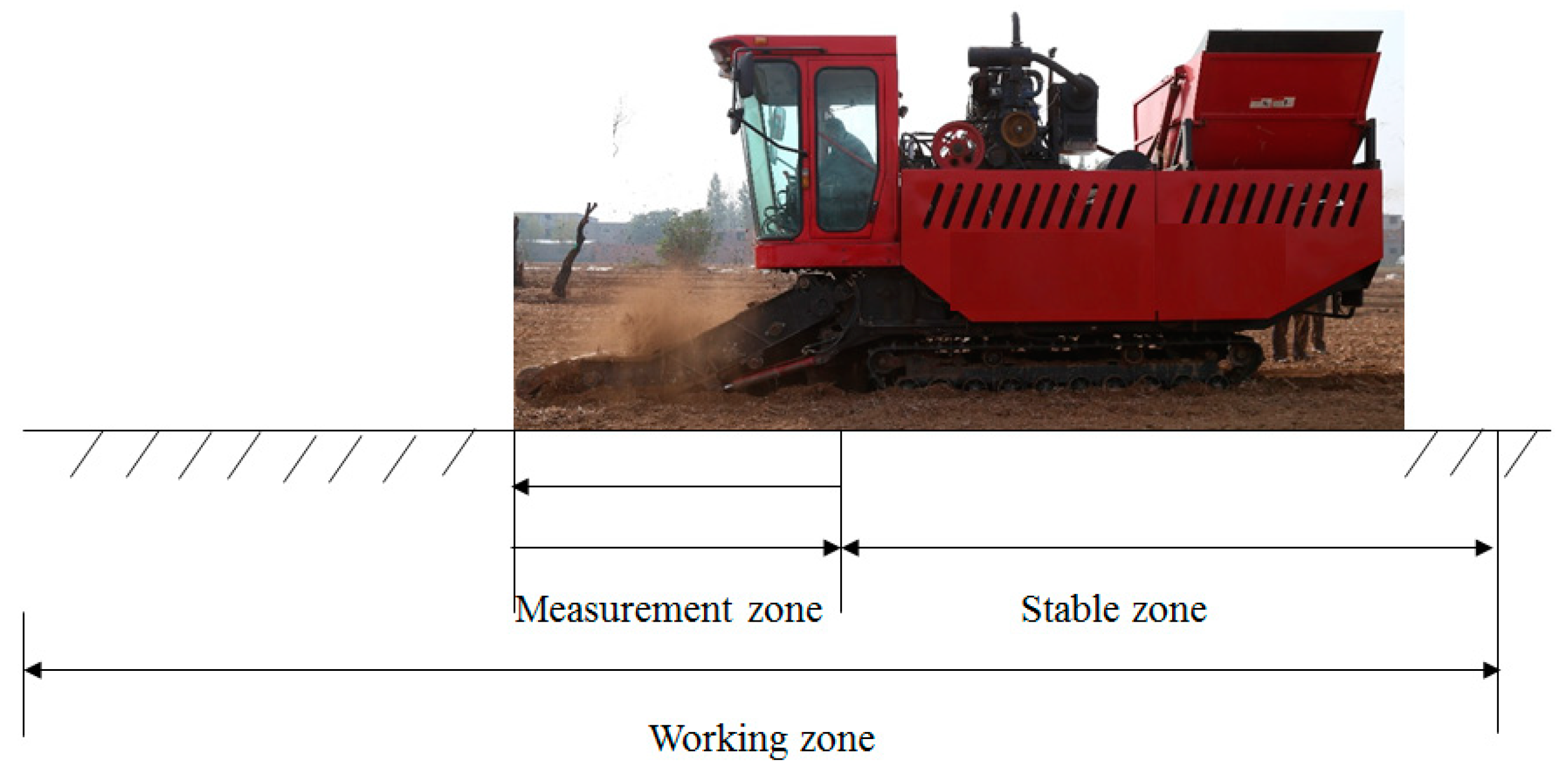
3. Field Tests
3.1. Assessment Index
3.2. Experimental Methods
3.3. Testing Results
4. Discussion
- (1)
- In the simulation study in this paper, the rhizome of the tiger nut is simplified and not considered, and the influence of the presence or absence of the rhizome of the tiger nut on the conveying and screening effect can be considered in the follow-up research.
- (2)
- In addition, the applicability and reliability of the machine in different operating environments should also be considered. The simulation test and field test carried out in this paper were mainly aimed at the sandy loam in Xinzheng city, China. The prototype is still in the pilot stage and has basically met the design requirements; we should study the structural optimization of the hoisting device under different soil types and carry out more field experiments in the further work to improve the operation efficiency and the working capacity of the device.
- (3)
- In China, the mechanized planting of tiger nut is still in its infancy; the designed harvester is only for mechanical harvesting and used in a few places. In the future, intelligent operation technology can be applied to the machine, such as real-time detection of the growth process of tiger nut and real-time identification of harvesting plots and unharvested plots, etc. On the basis of improving the functionality of the harvester, we should further promote the application of the harvester, grasp the advantages of tiger nut as a new multi-purpose crop for oil and grain feeding and actively develop the domestic and foreign markets.
5. Conclusions
- (1)
- Based on the agronomic requirement of tiger nut planting and harvest, a hoisting device consisting of hoisting chains, vibratory sieving plates, vibratory wheels, a soil roller, etc. was designed. Its functions include crushing soil lumps, conveying aggregates and separating tiger nuts, soil and grass, etc.
- (2)
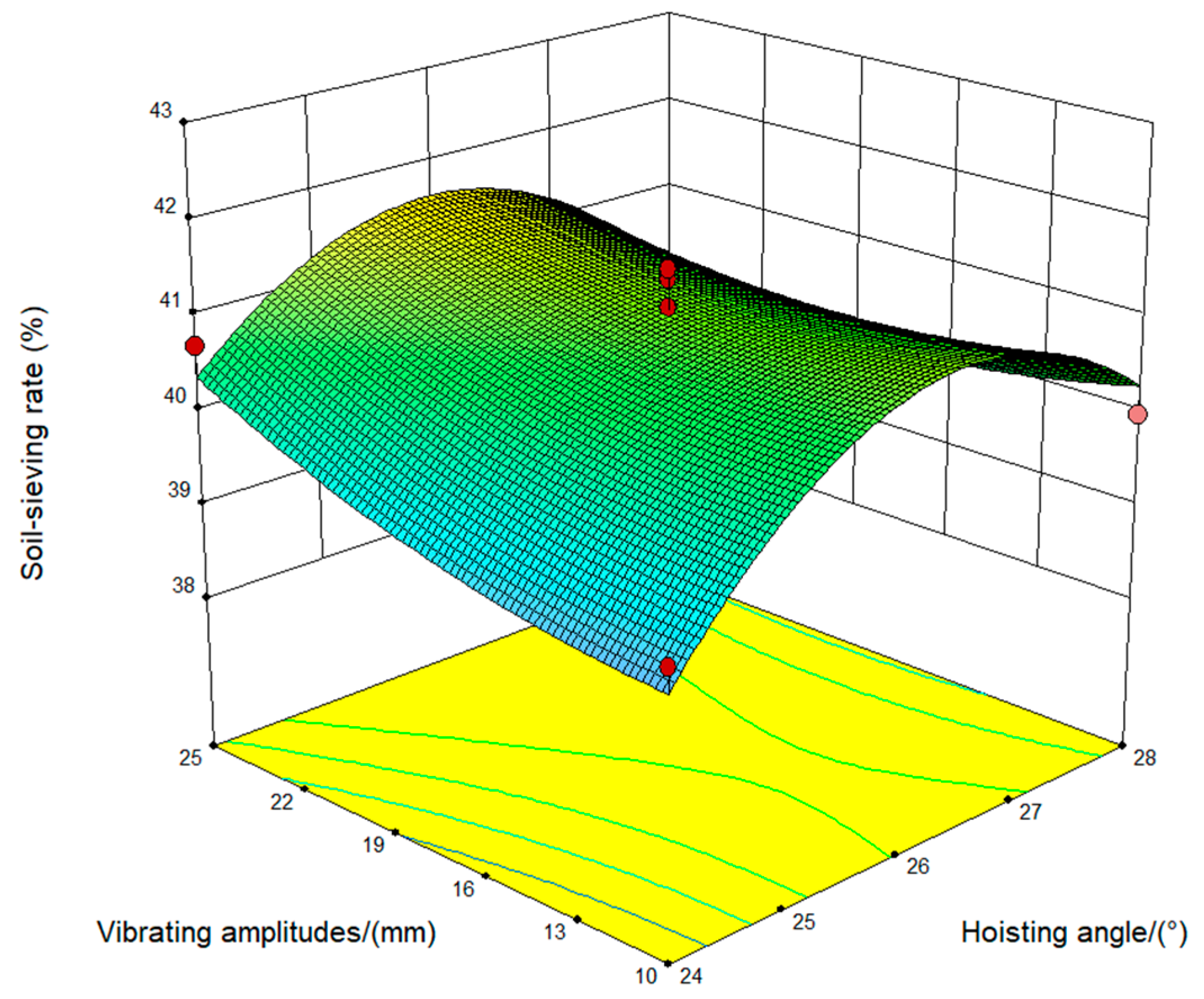
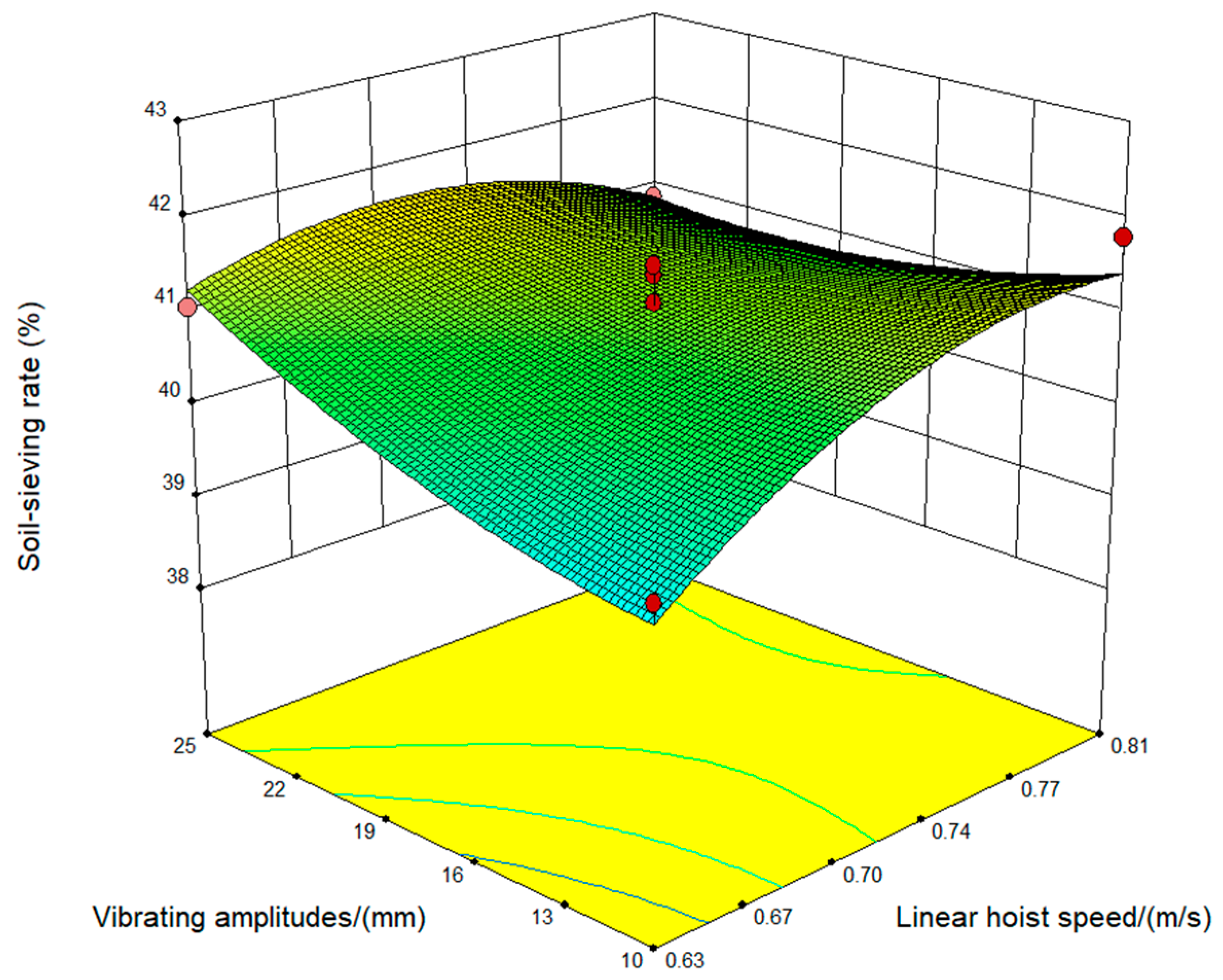
- Motion analyses were performed to determine the key components and factors that influence the soil-sieving rate; the coupling simulation model of the digging, hoisting and conveying device was built based on DEM-MBD. Four-factor and three-level quadratic orthogonal rotation combination design testing was conducted by taking the hoist speed, the linear hoist speed and the vibratory frequency and amplitudes of the vibrating wheels as experimental factors, and the soil-sieving rate as an experimental index. The results indicate that the influences of each factor on the soil-sieving rate are shown to be in a decreasing order: the vibratory frequency of vibrating wheels > the linear hoist speed > the vibratory amplitude of vibrating wheels > hoisting angles. The maximal soil-sieving rate reaches 42.5% when the vibratory frequency of vibrating wheels is 9 Hz, the hoist speed is 0.66 m/s, the vibratory amplitude of vibrating wheels is 25 mm and hoisting angle is 26°.
- (3)
- The hoisting device structure with triangle-shaped vibrating wheels and a combined rod-type hoisting sieve and optimized parameter combinations were verified by field tests. The experimental results show that the hoisting device has a maximal soil-sieving rate of 44.7% and can meet design requirements, which provides a theoretical basis for the optimization of a mechanical design for tiger nut harvesters.
- (4)
- Each vibratory sieving plate was made of steel and made by laser cutting; the raised part of the vibratory sieving plate was connected with a rod and the lower end of the vibratory sieving plate was reliably connected to the rod. Therefore, the quality of the parts could be guaranteed, the effective working time of the whole mechanism was long and the failure rate was low. Even if there was a failure, it could be replaced in time alone, which is very convenient for disassembly.
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oladele, A.K.; Aina, J.O. Chemical composition and functional properties of flour produced from two varieties of tigernut (Cyperus esculentus). Afr. J. Biotechnol. 2007, 21, 2473–2476. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.Z. Characteristics and cultivation techniques of Cyperus escluentus. N. Rur. Tech. 2018, 454, 8–9. [Google Scholar]
- Zhao, Y.G.; Zou, X.L.; Zhang, Y.; Han, Z.K.; Zeng, L.; Zhang, X.K. Cyperus escluentus high oil and high yield variety Zhongyousha 1. Chin. Seed Ind. 2019, 291, 96–97. [Google Scholar]
- Sánchez-Zapata, E.; Fernández-López, J.; Angel Pérez-Alvarez, J. Tiger nut commercialization: Health aspects, composition, properties, and food applications. Compr. Rev. Food Sci. Food Saf. 2012, 11, 366–377. [Google Scholar] [CrossRef]
- Babo, S.; Bazongo, P.; Son, G.; Kyaw, M.T.; Forster, B.P.; Nielen, S.; Lykke, A.M.; Quedraogo, A.; Bassole, I.H.N. Physicochemical characteristics and composition of three morphotypes of Cyperus esculentus Tubers and Tuber Oils. J. Anal. Methods Chem. 2015, 2015, 673547. [Google Scholar]
- Gambo, A.; Da’u, A. Tiger nut (Cyperus esculentus): Composition, products, uses and health benefits-a review. Bayero J. Pure Appl. Sci. 2014, 7, 56–61. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.L. Characteristics and Research Progress of Cyperus esculentus. Nor. Hort. 2017, 17, 192–201. [Google Scholar]
- Reid., W.S. Development of a prototypemechanical harvester for chufa. Can. Agric. Ungi. 1972, 14, 89–95. [Google Scholar]
- Satch, C.S. Exploration of Chufa (Cyperus esculentus L. var. sativus Boeck) as a Novel Specialty Crop for the Northeastern United States. Master’s Thesis, Rutgers Univ-Graduate School, New Brunswick, NJ, USA, 2016. [Google Scholar]
- Jilin Province Haoyishou Agriculture and Animal Husbandry Technology Development Coperation. Self-Propelled Cyperus Escluentus Harvester: ZL201822127409.6[P]. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCPD&dbname=SCPD2019&filename=CN209659956U&uniplatform=NZKPT&v=ZZbL5y_CRE10o-QP2QfHIFph9hd_DfMJHGHZCZ-DTQUy4lKRUYbdMizK-Ss_J7b9: (accessed on 22 November 2019).
- Shandong Juming Machinery Coperation. Self-Propelled Cyperus Escluentus Harvester: ZL201810964666.7[P]. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCPD&dbname=SCPD2019&filename=CN108901322A&uniplatform=NZKPT&v=S1CunRUfMekWvKEskpe_CbtyiyRWzV3HYzpvbLmri7AYJ87L1tVcKh1JqjZ7VEKo: (accessed on 30 November 2018).
- Xu, Y.J. Design and Research of New Type Cyperus Esculentus Harvester. Master’s Thesis, China Agricultural University, Beijing, China, 2016. [Google Scholar]
- Di, Z.F.; Li, Q.L.; Jiang, W.; Zhang, Z.Q.; Zhang, H.; Li, N.; Cui, Z.K.; Zhou, J. Research advance and perspective of Cyperus Esculentus planting and harvesting achiner technology and equipment. J. Shanxi Agric. Univ. 2022, 42, 96–106. [Google Scholar]
- Dai, Z.; Wu, M.; Fang, Z.; Qu, Y. Design andparameter optimization of fruit-soil separation device of Lily harvester. Agriculture 2022, 12, 175. [Google Scholar] [CrossRef]
- Wei, Z.C.; Li, H.W.; Mao, Y.J.; Sun, C.Z.; Li, X.Q.; Liu, W.Z.; Su, G.L. Experiment and analysis of potato-soil separation based on impact recording techology. Int. J. Agri. Biol. Eng. 2019, 12, 71–80. [Google Scholar]
- Wang, F.Y. Discussion on the structure of passive jitter wheel of 4U-2 potato harvester. Agric. Sci. Tech. Equip. 2011, 204, 61–62. [Google Scholar]
- Li, T.; Zhou, J.; Xu, W.Y.; Li, Q.L.; Zhang, H.; Qin, X.T.; Li, N.; Li, W.H.; Guo, D.Y. Development of 4UGS2 type double-row sweet potato harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 26–33. [Google Scholar]
- Jiang, Y.W. Design and Research of the 4U-1600 Potato Combine Harvester. Master’s Thesis, Gansu Agricultural University, Lanzhou, China, 2016. [Google Scholar]
- Hu, H.L.; Sun, F.H. Study on designing and testing of the drillunit with indrividual profiling press wheel. Trans. Chin. Soc. Agric. Mach. 1996, 27, 53–57. [Google Scholar]
- Lv, J.Q.; Tian, Z.E.; Yang, Y.; Shang, Q.Q.; Wu, J.E. Design and experimental analysis of 4U2A type double-row potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 17–24. [Google Scholar]
- Chen, X.D.; Hu, Z.C.; Wang, B.; You, Z.Y.; Peng, B.L.; Hu, L.L. Design and parameter optimization of sweet-potato-stalk separator for single row sweet potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2019, 35, 12–21. [Google Scholar]
- Kang, H.B.; Liu, M.; Wang, L.; Wei, M.Y.; Liu, J.C.; Zhou, J.D.; Zhang, S.Q. Simulation analysis of separating and conveying device of potato harvester based on EDEM. J. Agric. Mech. Res. 2022, 44, 1–8 + 16. [Google Scholar]
- Zhao, H.B.; Huang, Y.X.; Liu, Z.D.; Liu, W.Z.; Zheng, Z.Q. Applications of discrete element method in the research of agricultural machinery: A review. Agriculture 2021, 11, 425. [Google Scholar] [CrossRef]
- Hu, K.; Guo, Y.C. Virtual prototyping of belt conveyor based on Recurdyn. Appl. Mech. Mater. 2009, 16–19, 776–780. [Google Scholar] [CrossRef]
- He, X.N.; Zhang, X.J.; Zhao, Z.; Shang, S.Q.; Wang, D.W.; Yang, S. Design and optimization tests of reverse spin-throwing Cyperus edulis starting device. Trans. Chin. Soc. Agric. Mach. 2022, 53, 34–43. [Google Scholar]
- Zhang, R.; Han, D.L.; Ji, Q.L.; He, Y.; Li, J.Q. Calibration methods of sandy soil parameters in simulation of discrete element method. Trans. Chin. Soc. Agric. Mach. 2017, 48, 49–56. [Google Scholar]
- Hao, J.J.; Long, S.F.; Li, H.; Jia, Y.L.; Ma, Z.K.; Zhao, J.G. Development of discrete element model and calibration of simulation parameters for mechanically-harvested yam. Trans. Chin. Soc. Agric. Eng. 2019, 35, 34–42. [Google Scholar]
- Qiao, Y.C.; Yi, J.G.; Yuan, Y.W. Simulation of flat ridge process based on EDEM/FEM coupling algorithm. J. Hebei Agric. Univ. 2020, 43, 127–132. [Google Scholar]
- Qi, J.T.; An, S.G.; Kan, Z.; Meng, H.W.; Li, Y.P.; Zhao, X.Y. Discrete element-based calibration of simulation parameters of Cyperus esculentus L. (tiger nut) planted in sandy soil. J. Food Processing Preserv. 2021, 45, e15631. [Google Scholar] [CrossRef]
- Zhang, S.; Fu, J.; Zhang, R.; Zhang, Y.; Yuan, H. Experimental study on the mechanical properties of friction, collision and compression of tiger nut tubers. Agriculture 2022, 12, 65. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Wang, F.A.; Zhang, Y.C.; Zhang, D.; Tian, R. Design and experiment of self-propelled panax notoginseng harvester. Trans. Chin. Soc. Agric. Mach. 2016, 47, 234–240. [Google Scholar]
- Lv, J.Q.; Sun, H.; Dui, H.; Peng, M.M.; YU, J.Y. Design and experiment on conveyor separation device of potato digger under heavy soil condition. Trans. Chin. Soc. Agric. Mach. 2017, 48, 146–155. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Working width/mm | 1800 |
| Excavation depth/mm | 100~200 |
| Overall dimension/mm | 6800 × 2500 × 3200 |
| Auxiliary power/kW | 140 |
| Theoretical production efficiency/hm2/h | 0.133~0.212 |
| Harvesting rate | ≥95% |
| Material | Parameters | Value |
|---|---|---|
| Tiger nut | Density/kg·m−3 | 1230 |
| Poisson ratio | 0.18 | |
| Young’s modulus/MPa | 9.44 | |
| Steel | Density/kg·m−3 | 7850 |
| Poisson ratio | 0.29 | |
| Young’s modulus/MPa | 207 | |
| Soil | Density/kg·m−3 | 1780 |
| Poisson ratio | 0.26 | |
| Young’s modulus/MPa | 2.77 | |
| Soil to soil | Coefficient of restitution | 0.14 |
| Coefficient of static friction | 0.56 | |
| Coefficient of rolling friction | 0.27 | |
| Tiger nut to steel | Coefficient of restitution | 0.619 |
| Coefficient of static friction | 0.254 | |
| Coefficient of rolling friction | 0.072 | |
| Tiger nut to soil | Coefficient of restitution | 0.49 |
| Coefficient of static friction | 0.42 | |
| Coefficient of rolling friction | 0.25 |
| Code | Experimental Factors | |||
|---|---|---|---|---|
| Hoisting Angle/° | Linear Velocity/m·s−1 | Vibrating Frequency/Hz | Vibrating Amplitude/mm | |
| −1 | 24 | 0.63 | 7 | 10 |
| 0 | 26 | 0.72 | 8 | 17.5 |
| 1 | 28 | 0.81 | 9 | 25 |
| No. | Experimental Factors | Experimental Index | |||
|---|---|---|---|---|---|
| Hoisting Angle/° | Linear Velocity/m·s−1 | Vibrating Frequency/Hz | Vibrating Amplitudes/mm | Soil-Sieving Rate/% | |
| 1 | −1 | −1 | 0 | 0 | 38.58 |
| 2 | 1 | −1 | 0 | 0 | 38.94 |
| 3 | −1 | 1 | 0 | 0 | 38.60 |
| 4 | 1 | 1 | 0 | 0 | 39.80 |
| 5 | 0 | 0 | −1 | −1 | 40.22 |
| 6 | 0 | 0 | 1 | −1 | 41.98 |
| 7 | 0 | 0 | −1 | 1 | 41.46 |
| 8 | 0 | 0 | 1 | 1 | 42.50 |
| 9 | −1 | 0 | 0 | −1 | 39.28 |
| 10 | 1 | 0 | 0 | −1 | 39.98 |
| 11 | −1 | 0 | 0 | 1 | 40.70 |
| 12 | 1 | 0 | 0 | 1 | 39.80 |
| 13 | 0 | −1 | −1 | 0 | 39.30 |
| 14 | 0 | 1 | −1 | 0 | 40.36 |
| 15 | 0 | −1 | 1 | 0 | 41.52 |
| 16 | 0 | 1 | 1 | 0 | 42.12 |
| 17 | −1 | 0 | −1 | 0 | 38.96 |
| 18 | 1 | 0 | −1 | 0 | 39.56 |
| 19 | −1 | 0 | 1 | 0 | 40.46 |
| 20 | 1 | 0 | 1 | 0 | 41.30 |
| 21 | 0 | −1 | 0 | −1 | 39.80 |
| 22 | 0 | 1 | 0 | −1 | 41.80 |
| 23 | 0 | −1 | 0 | 1 | 41.06 |
| 24 | 0 | 1 | 0 | 1 | 40.86 |
| 25 | 0 | 0 | 0 | 0 | 41.40 |
| 26 | 0 | 0 | 0 | 0 | 41.11 |
| 27 | 0 | 0 | 0 | 0 | 40.84 |
| 28 | 0 | 0 | 0 | 0 | 41.50 |
| 29 | 0 | 0 | 0 | 0 | 40.49 |
| Source of Variance | Sum of Square | Degree of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 31.71895 | 14 | 2.265639 | 16.51358 | <0.0001 |
| A | 0.653333 | 1 | 0.653333 | 4.761954 | 0.0466 |
| B | 1.569633 | 1 | 1.569633 | 11.4406 | 0.0045 |
| C | 8.3667 | 1 | 8.3667 | 60.98241 | <0.0001 |
| D | 0.918533 | 1 | 0.918533 | 6.694919 | 0.0215 |
| AB | 0.1764 | 1 | 0.1764 | 1.285728 | 0.2759 |
| AC | 0.0144 | 1 | 0.0144 | 0.104957 | 0.7507 |
| AD | 0.64 | 1 | 0.64 | 4.664772 | 0.0486 |
| BC | 0.0529 | 1 | 0.0529 | 0.385573 | 0.5446 |
| BD | 1.21 | 1 | 1.21 | 8.819334 | 0.0101 |
| CD | 0.1296 | 1 | 0.1296 | 0.944616 | 0.3476 |
| A2 | 12.92324 | 1 | 12.92324 | 94.19366 | <0.0001 |
| B2 | 2.063325 | 1 | 2.063325 | 15.03897 | 0.0017 |
| C2 | 0.627379 | 1 | 0.627379 | 4.572784 | 0.0506 |
| D2 | 0.485204 | 1 | 0.485204 | 3.536508 | 0.0810 |
| Residual | 1.92078 | 14 | 0.137199 | ||
| Lack of fit | 1.2361 | 10 | 0.12361 | 0.722148 | 0.6929 |
| Error | 0.68468 | 4 | 0.17117 | ||
| Sum | 33.63973 | 28 |
| No | Test Length/m | Soil-Sieving Rate |
|---|---|---|
| 1 | 2.3 | 45.9% |
| 2 | 2.3 | 44.3% |
| 3 | 2.3 | 43.8% |
| 4 | \ | 44.7% |
| 5 | \ | 4.92% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Lv, Y.; Qu, Z.; Wang, W.; Zhou, Z.; He, H. Parameters Optimization and Test of Caterpillar Self-Propelled Tiger Nut Harvester Hoisting Device. Agriculture 2022, 12, 1060. https://doi.org/10.3390/agriculture12071060
He X, Lv Y, Qu Z, Wang W, Zhou Z, He H. Parameters Optimization and Test of Caterpillar Self-Propelled Tiger Nut Harvester Hoisting Device. Agriculture. 2022; 12(7):1060. https://doi.org/10.3390/agriculture12071060
Chicago/Turabian StyleHe, Xun, Yanliu Lv, Zhe Qu, Wanzhang Wang, Zheng Zhou, and Hao He. 2022. "Parameters Optimization and Test of Caterpillar Self-Propelled Tiger Nut Harvester Hoisting Device" Agriculture 12, no. 7: 1060. https://doi.org/10.3390/agriculture12071060