
The Improvement of a Traction Model for Agricultural Tire–Soil Interaction


Abstract
:1. Introduction
2. Materials and Methods
2.1. Formulation of the Improved Model
- , when the entire contact area was considered as sheared area;
- , when the hypothesis of the variable shear area was considered.
2.2. Goodness-of-Fit Analysis
- percentage of points within the 95% confidence interval of data (Pw95CI);
- mean absolute deviation (MAD):
- root mean squared deviation (RMSD):
- mean scaled absolute deviation (MSAD);where ni is the number of values contributing to each experimental data mean di (ni = 9) and si is the standard deviation for each data mean (e.g., MSAD = 1.5 means that the average difference between model and experimental data is 1.5 standard errors);
- Pearson correlation coefficient r2.
2.3. Tested Variants
- The initial model, as presented in a previous paper [12];
- The improved model, which took into account the deformation of the tire cross section and a variable shear area (Equation (16));
- The improved model, considering the tire cross-section deformation and a constant shear area (Equation (15)).
3. Results and Discussion
3.1. Geometry of the Tire–Ground Contact Patch and Maximum Shear Stress
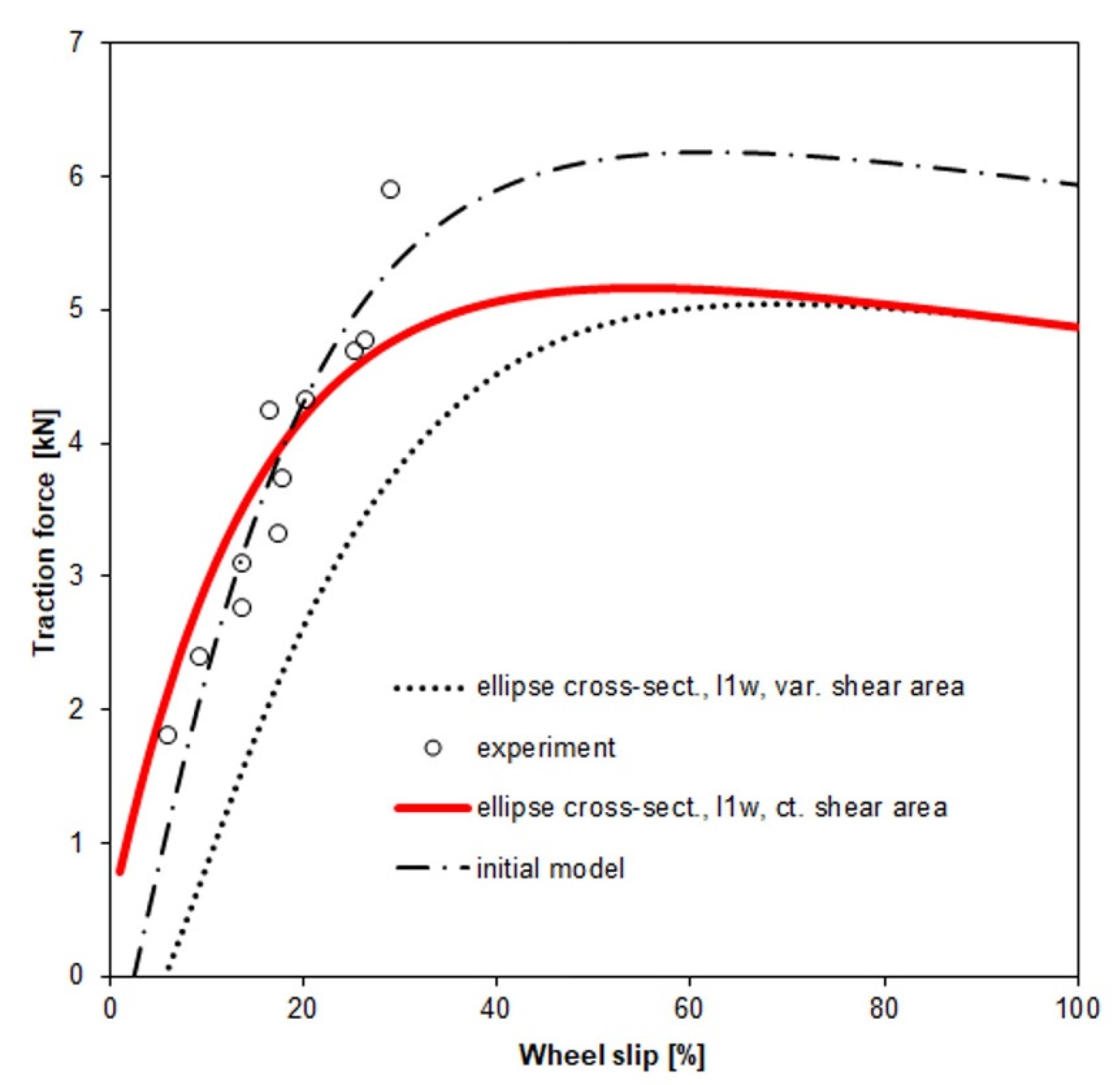
3.2. Traction Force
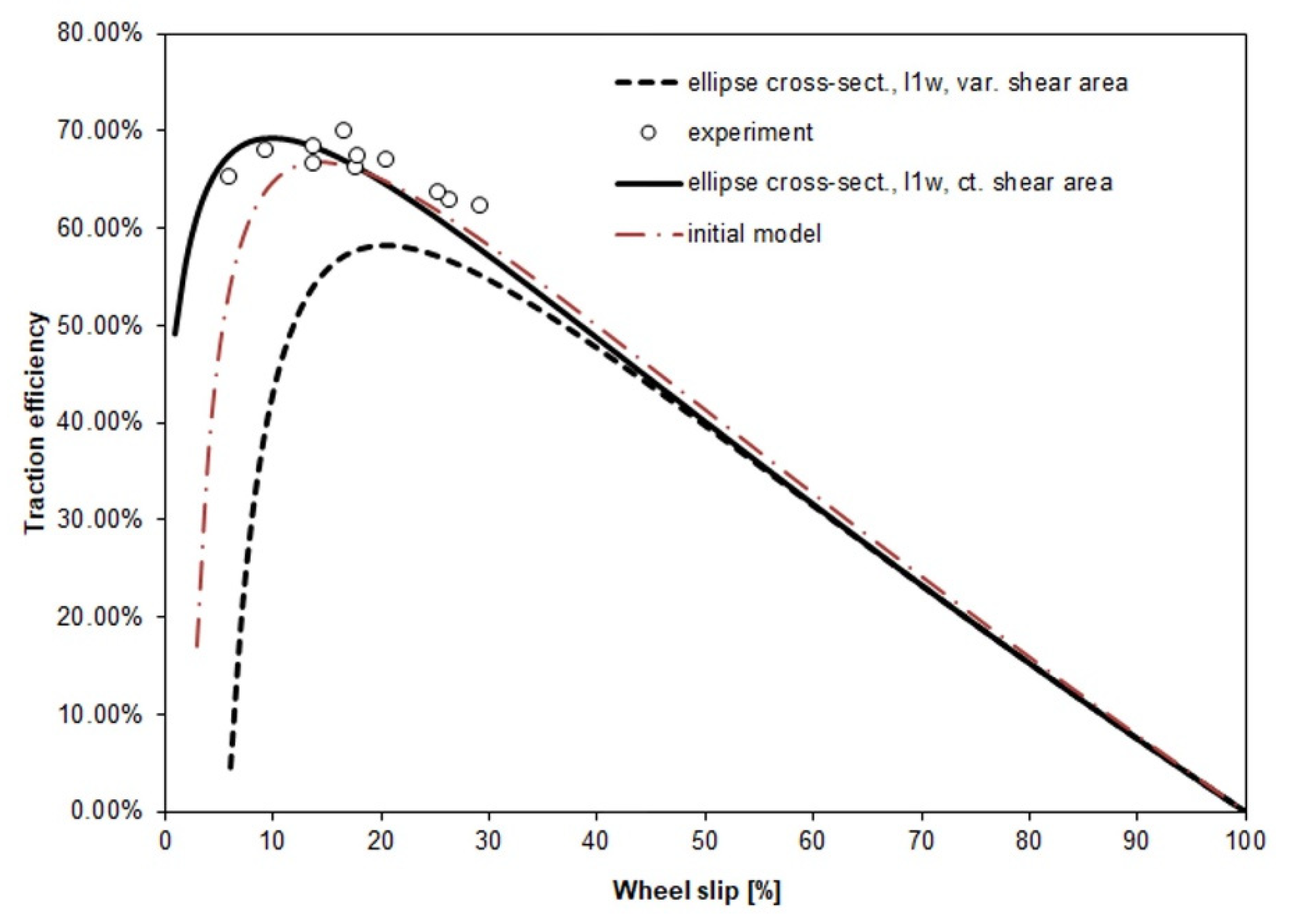
3.3. Traction Efficiency
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sheludchenko, B.; Sarauskis, E.; Kukharets, S.; Zabrodsky, A. Graphic analytical optimization of design and operating parameters of tires for drive wheels of agricultural machinery. Soil Tillage Res. 2022, 215, 1–6. [Google Scholar] [CrossRef]
- Aniofantis, A.S.; Cutini, M.; Bietresato, M. An experimental-numerical approach for modeling the mechanical behavior of a pneumatic tyre for agricultural machines. Appl. Sci. 2020, 10, 3481. [Google Scholar] [CrossRef]
- Catalan, H.; Linares, P.; Mendez, V. Tractor_PT: A traction prediction software for agricultural tractors. Comput. Electron. Agric. 2008, 60, 289–295. [Google Scholar] [CrossRef]
- Farhadi, P.; Golmohammadi, A.; Malvajerdi, A.S.; Shahgholi, G. Tire and soil effects over power loss: Measurement and comparison with finite element results. J. Terramech. 2020, 92, 13–22. [Google Scholar] [CrossRef]
- Yamashita, H.; Jayakumar, P.; Alsaleh, M.; Sugiyama, H. Physics-based deformable tire-soil interaction model for off-road mobility simulation and experimental validation. J. Comput. Nonlinear Dyn. 2018, 13, 021002. [Google Scholar] [CrossRef]
- Hu, C.; Gao, J.; Song, X.; Tan, X. Analytical modeling and DEM analysis of soil-wheel interaction under cornering and skidding conditions in off-road vehicles. AIP Adv. 2021, 11, 085122. [Google Scholar] [CrossRef]
- Taheri, S. A Hybrid Soft Soil Tire Model (HSSTM) for Vehicle mobility and Deterministic Performance Analysis in Terramechanics Applications. Ph.D. Thesis, Mechanical Engineering, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 28 August 2015. [Google Scholar]
- He, R.; Sandu, C.; Khan, A.K.; Guthrie, A.G.; Els, P.S.; Hamersma, H.A. Review of terramechanics models and their applicability to real-time application. J. Terramech. 2019, 81, 3–22. [Google Scholar] [CrossRef] [Green Version]
- Zieher, O.; Meiywer, M. Investigation of tire-soil-interactions using the discrete-element-method. In Proceedings of the IV International Conference on Particle-Based Methods—Fundamentals and Application “PARTICLES 2015”, Barcelona, Spain, 28–30 September 2015. [Google Scholar]
- Emam, M.A.A.; Shaaban, S.; El-Demerdash, S.; El-Zomor, H. A tyre-terrain interaction model for off-road vehicles. J. Mech. Eng. Res. 2011, 3, 226–238. [Google Scholar]
- Schmid, I.C. Interaction of the vehicle terrain results from 10 years research at IKK. J. Terramech. 1995, 32, 3–27. [Google Scholar] [CrossRef]
- Rosca, R.; Cârlescu, P.; Ţenu, I. A semi-empirical traction prediction model for an agricultural tyre, based on the super ellipse shape of the contact surface. Soil Tillage Res. 2014, 141, 10–18. [Google Scholar] [CrossRef]
- Keller, T. A model for prediction of the contact area and the distribution of vertical stress below agricultural tyres from readily available tyre parameters. Biosyst. Eng. 2005, 92, 85–96. [Google Scholar] [CrossRef]
- Ghiulai, C.; Vasiliu, C. Ground Vehicles Dynamics (In Romanian); Teaching and Pedagogy Publishing House: Bucharest, Romania, 1975; pp. 83–86. [Google Scholar]
- Rashidi, M.; Gholami, M. Muliplate penetration tests to predict soil pressure-sinkage behaviour. World Appl. Sci. J. 2008, 3, 705–710. [Google Scholar]
- Janosi, Z.; Hanamoto, B. The analytical determination of drawbar pull as a function of slip, for tracked vehicles in deformable soils. In Proceedings of the 1st Intl. Conference Mech. Soil-Vehicle Systems, Turin, Italy, 12–16 June 1961. [Google Scholar]
- Maclaurin, B. Comparing the NRMM (VCI), MMP and VLCI traction models. J. Terramech. 2007, 44, 43–51. [Google Scholar] [CrossRef]
- Abd El-Gawwad, K.A.; Crolla, D.A.; Soliman, A.M.A.; El-Sayed, F.M. Off-road tyre modelling I: The multispoke tyre model modified to include the effect of straight lugs. J. Terramech. 1999, 36, 3–24. [Google Scholar] [CrossRef]
- Adams, B.T. Central Tyre Inflation for Agricultural Vehicles. Ph.D. Thesis, Graduate College, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2002. [Google Scholar]
- Komandi, G. Reevaluation of the adhesive relationship between the tyre and the soil. J. Terramech. 1993, 30, 77–83. [Google Scholar] [CrossRef]
- American Society of Agricultural Engineers. ASAE D497.7:2011. Agricultural Machinery Management Data. Available online: https://elibrary.asabe.org/abstract.asp?aid=36431 (accessed on 20 June 2018).
- Schunn, C.D.; Wallach, D. Evaluating goodness-of-fit in comparison of models to data. In Psychologie der Kognition: Reden and Vorträge Anlässlich der Emeritierung; Tack, W., Ed.; University of Saarland Press: Saarbrueken, Germany, 2005; pp. 115–154. [Google Scholar]
- Battiato, A.; Diserens, E.; Laloui, L.; Sartori, L. A mechanistic approach to topsoil damage due to slip of tractor tyres. J. Appl. Sci. Appl. 2013, 2, 160–168. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Value |
|---|---|---|
| Load on the driving wheel, [kN] | G | 11.75 |
| Type of tire | - | 14.00–38 |
| Overall diameter of tire [m] | d0 | 1.58 |
| Tire width [m] | b | 0.367 |
| Lug width [m] | bw | 0.04 |
| Lug length [m] | bL | 0.24 |
| Lug height [m] | bH | 0.025 |
| Distance between lugs [m] | - | 0.195 |
| Item | Symbol | Value |
|---|---|---|
| Soil deformation modulus [m] | K | 0.05 |
| Coefficients for the sinkage equation | k | 55 |
| n | 1.3 | |
| Soil cohesion [kPa] | c | 25 |
| Angle of internal friction [°] | φ | 32 |
| Cone penetrometer index [kPa] | CI | 970 |
| Item | Model | ||
|---|---|---|---|
| Initial Model | Improved Model, Variable Shear Area | Improved Model, Constant Shear Area | |
| lc [m] | 0.530 | 0.534 | 0.534 |
| lw [m] | 0.367 | 0.384 | 0.384 |
| l1w [m] | - | 0.222 | 0.222 |
| zc [m] | 0.0271 | 0.0275 | 0.0275 |
| rd [m] | 1.400 | 1.257 | 1.257 |
| At [m2] | 0.145 | 0.1086 | 0.1086 |
| τmax [kPa] | 53.3 | 61.2 | 61.2 |
| Parameter 1 | Tire–Ground Model | ||
|---|---|---|---|
| Initial Model | Modified Model, Variable Shear Area | Modified Model, Constant Shear Area | |
| r2 | 0.921 | 0.981 | 0.896 |
| MAD | 0.3353 | 1.6408 | 0.3981 |
| MSAD | 3.116 | 8.817 | 1.184 |
| Pw95CI | 66.7 | 11.1 | 88.9 |
| RMSD | 0.4379 | 1.685 | 0.4952 |
| Parameter | Tire–Ground Model Type | ||
|---|---|---|---|
| Initial Model | Modified Model, Variable Shear Area | Modified Model, Constant Shear Area | |
| r2 | 0.203 | 0.726 | 0.838 |
| MAD | 0.0569 | 0.0953 | 0.0198 |
| MSAD | 5.147 | 1.966 | 0.309 |
| Pw95CI | 55.6 | 88.9 | 100 |
| RMSD | 0.075 | 0.1279 | 0.0231 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roşca, R.; Cârlescu, P.; Ţenu, I.; Vlahidis, V.; Perşu, C. The Improvement of a Traction Model for Agricultural Tire–Soil Interaction. Agriculture 2022, 12, 2035. https://doi.org/10.3390/agriculture12122035
Roşca R, Cârlescu P, Ţenu I, Vlahidis V, Perşu C. The Improvement of a Traction Model for Agricultural Tire–Soil Interaction. Agriculture. 2022; 12(12):2035. https://doi.org/10.3390/agriculture12122035
Chicago/Turabian StyleRoşca, Radu, Petru Cârlescu, Ioan Ţenu, Virgil Vlahidis, and Cătălin Perşu. 2022. "The Improvement of a Traction Model for Agricultural Tire–Soil Interaction" Agriculture 12, no. 12: 2035. https://doi.org/10.3390/agriculture12122035