
Design of and Experiment on Reciprocating Inter-Row Weeding Machine for Strip-Seeded Rice

 ,
,  ,
,  , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Machine Design
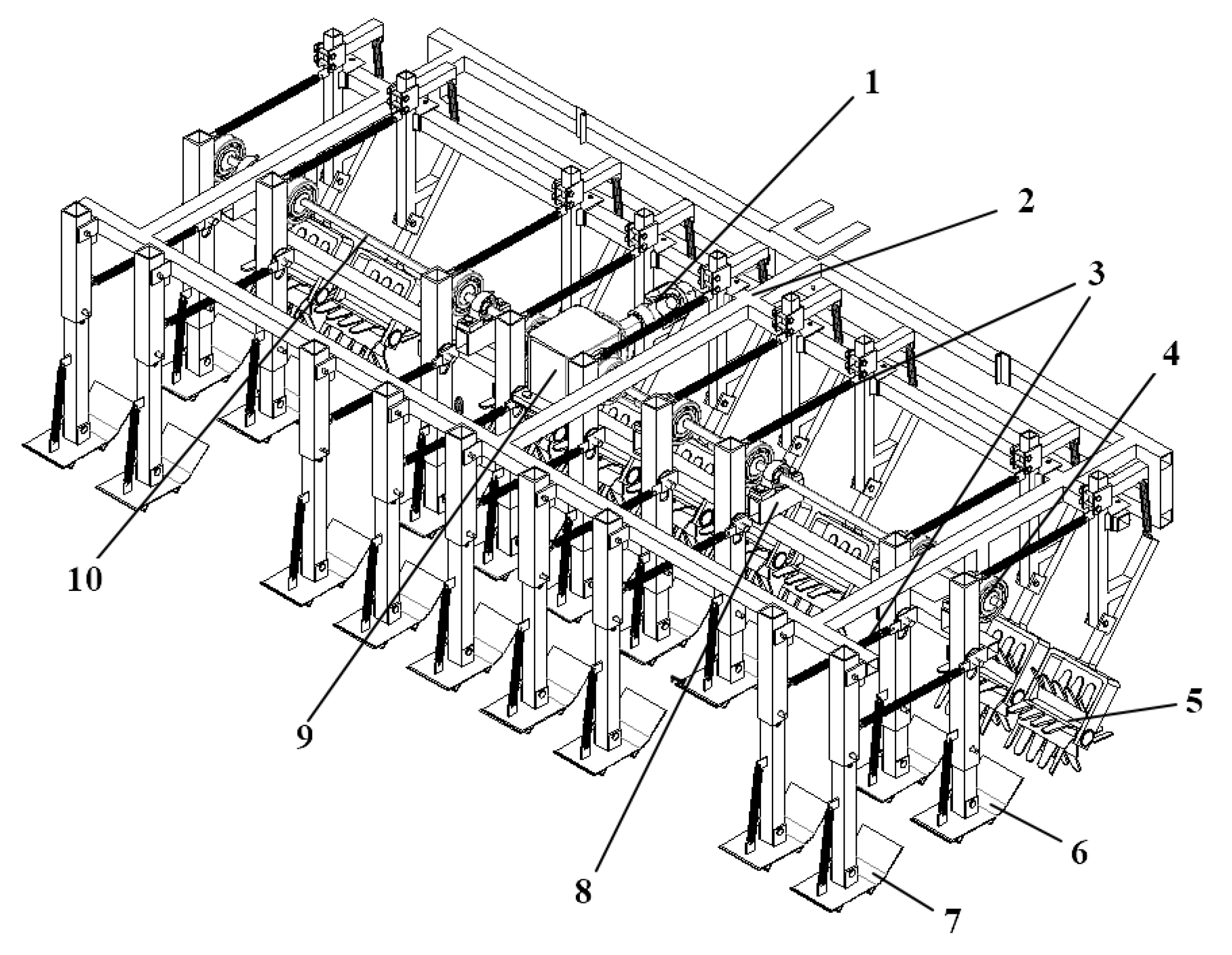
2.1.1. Overall Structure
2.1.2. Working Principle
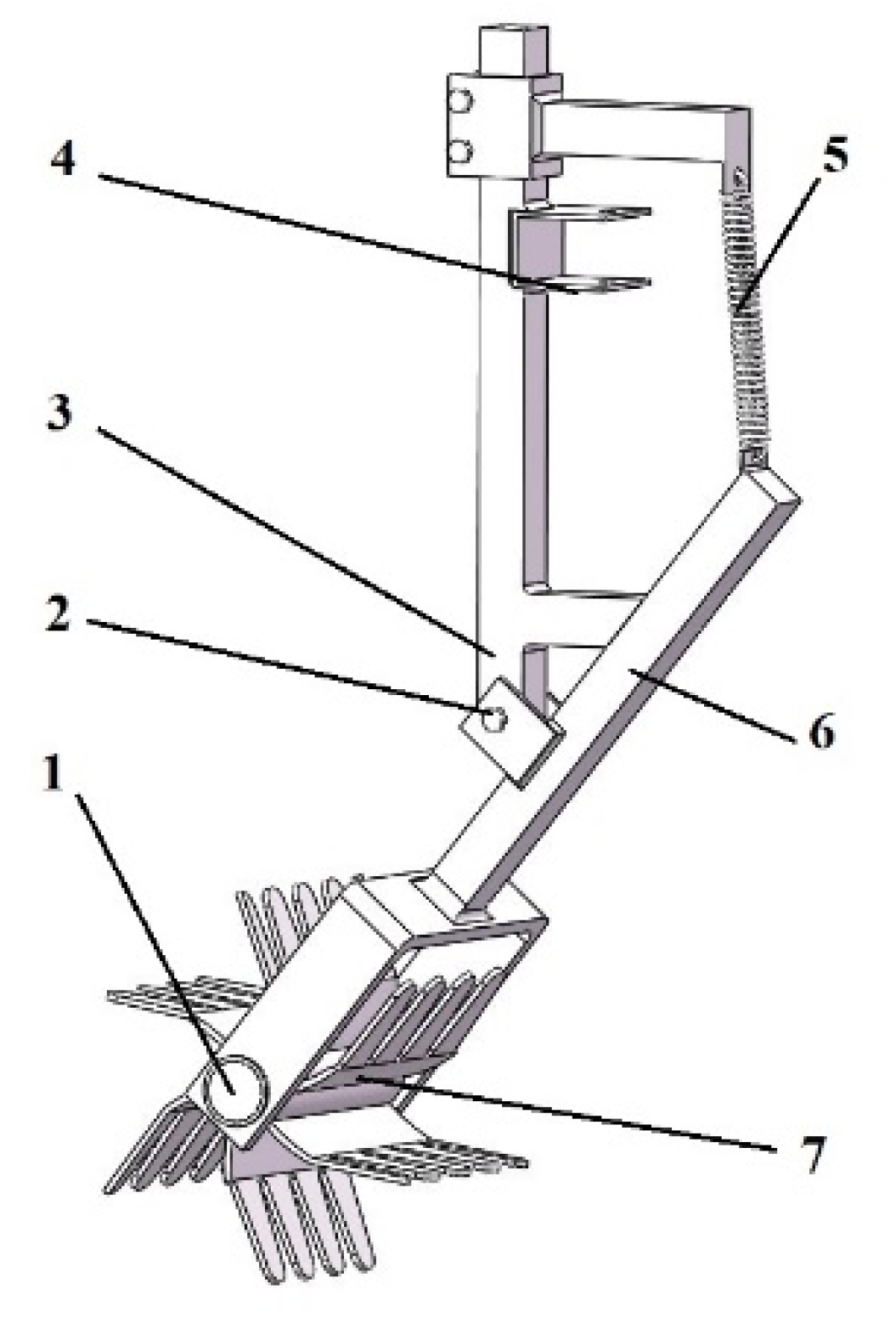
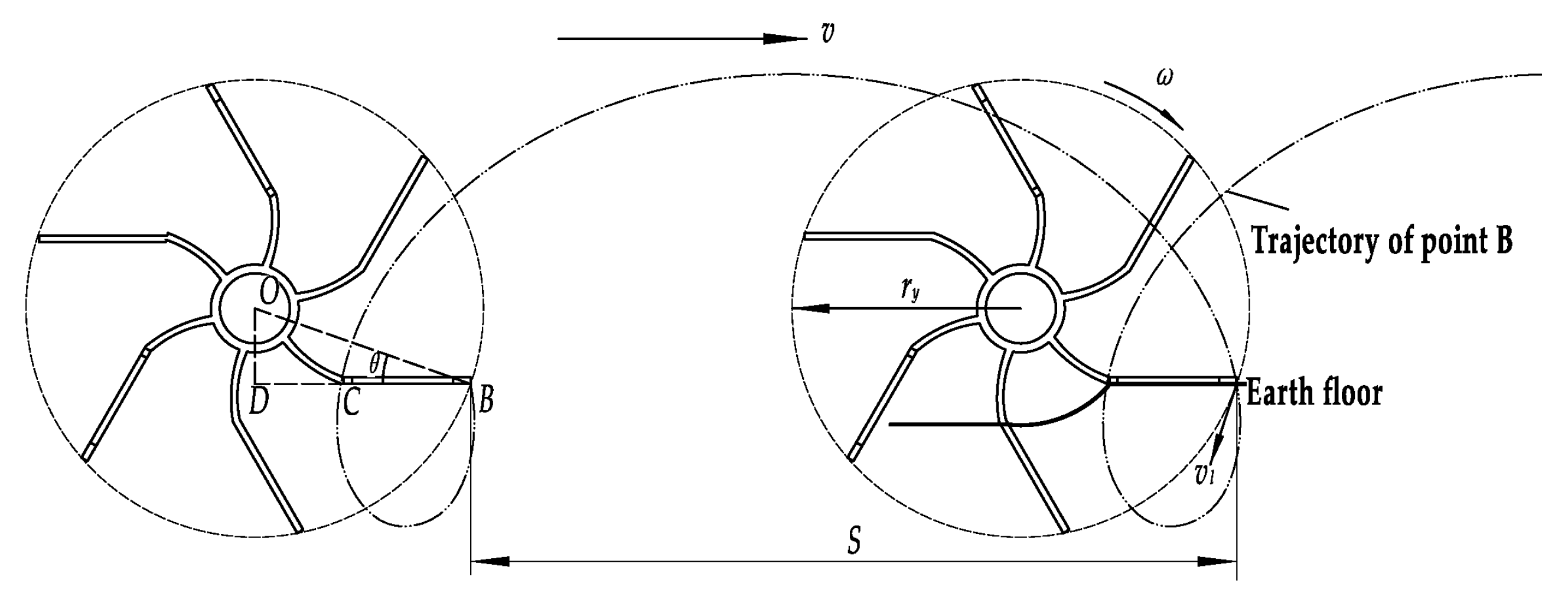
2.1.3. Weeding Wheel
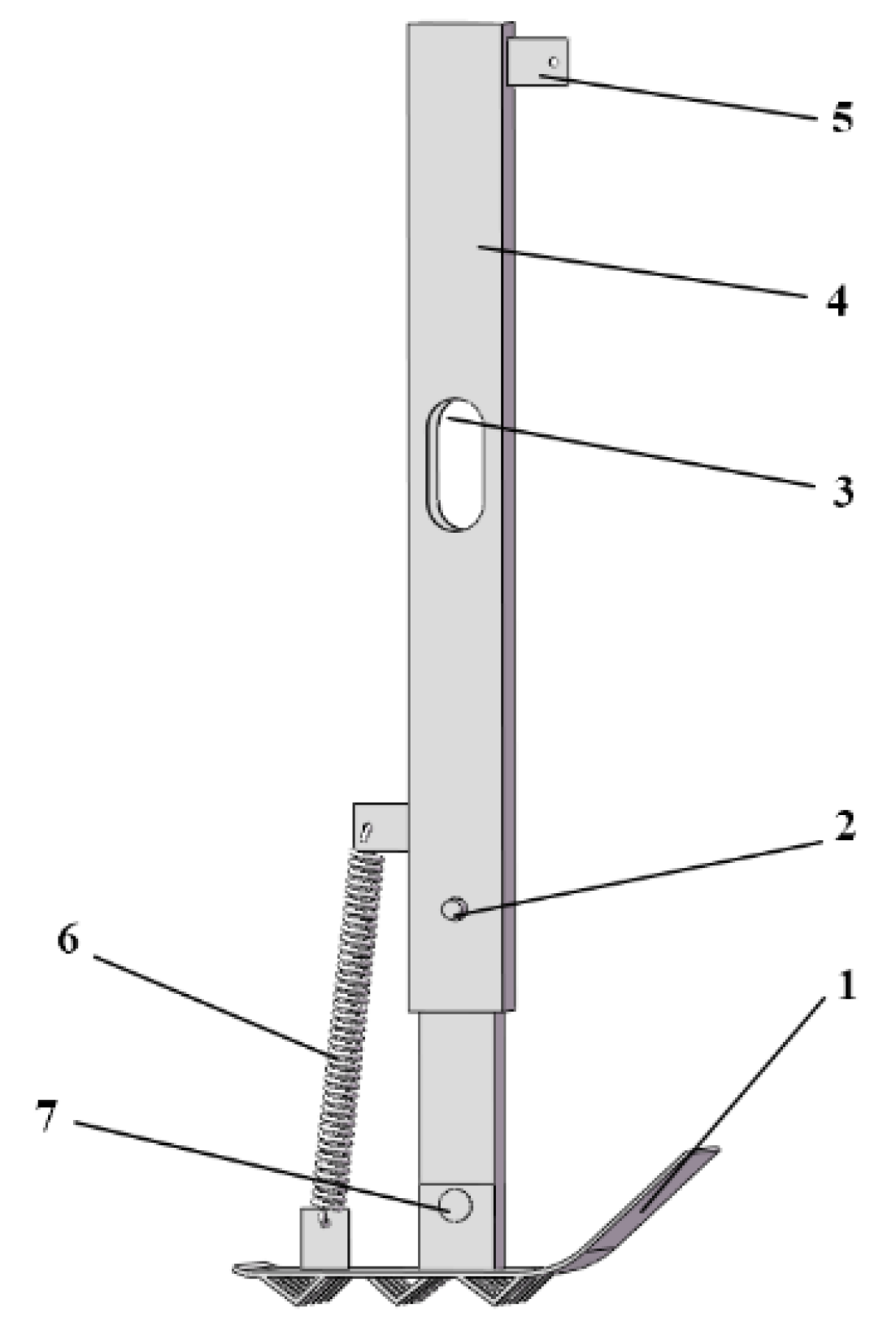
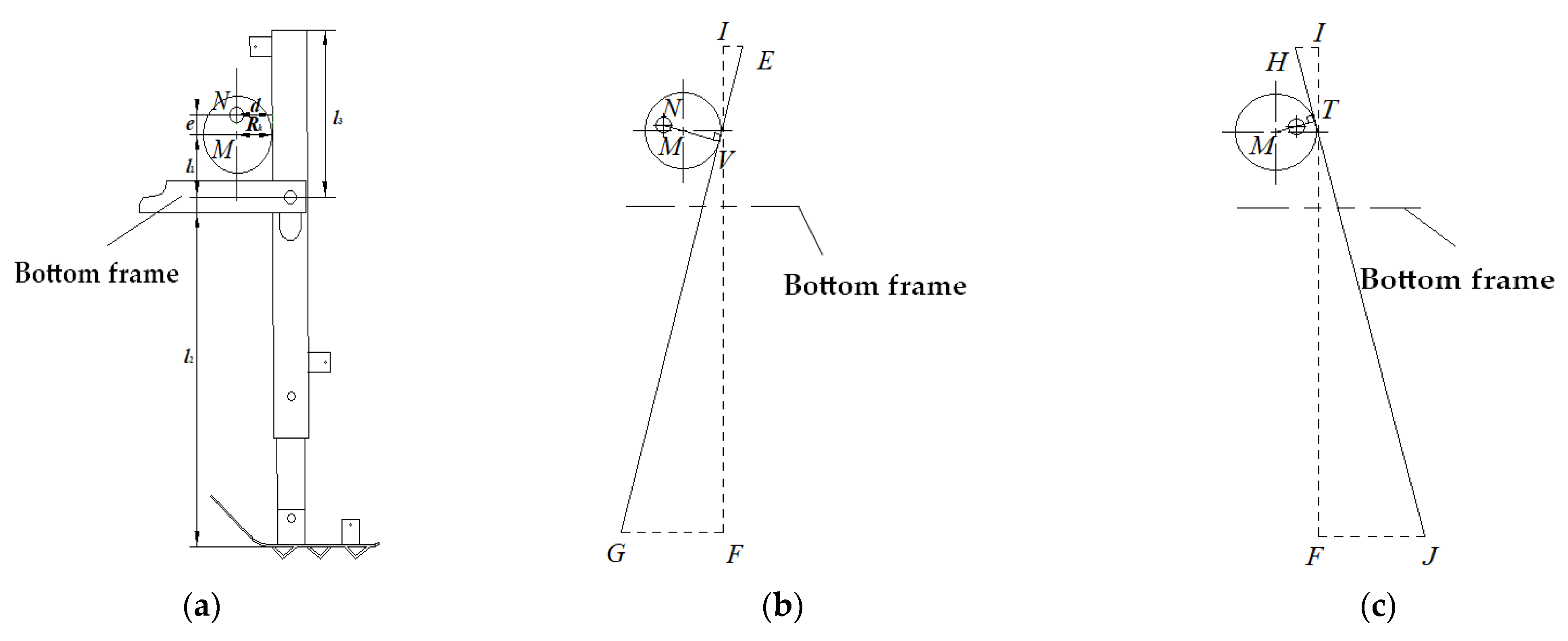
2.1.4. Weeding Shovel
2.2. EDEM-Based Optimization of the Bending Angle of the Weeding Teeth
2.3. Field Experiment
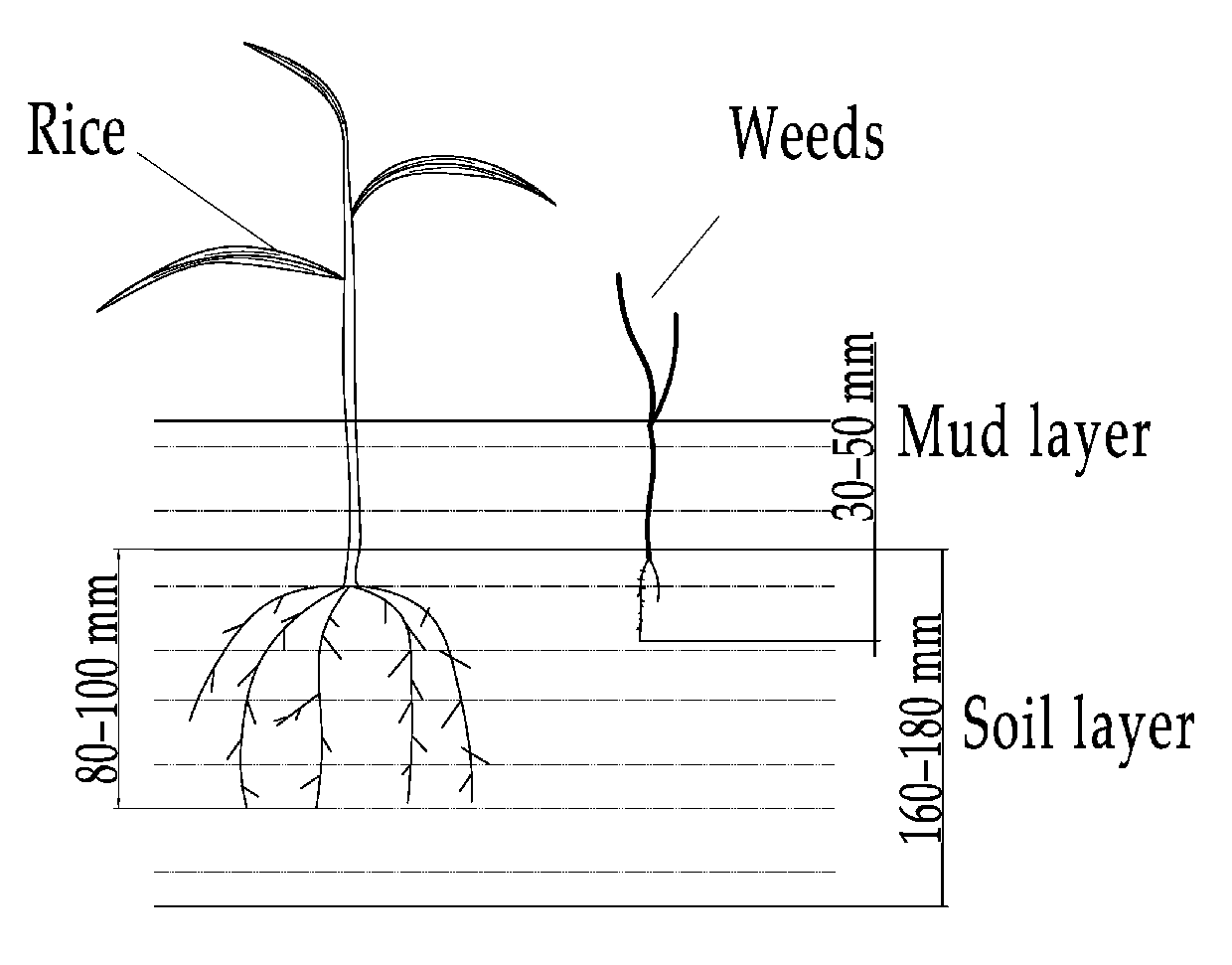
2.3.1. Working Environment and Agronomic Requirements
2.3.2. Experimental Trial of Weeding Performance
3. Results and Discussion
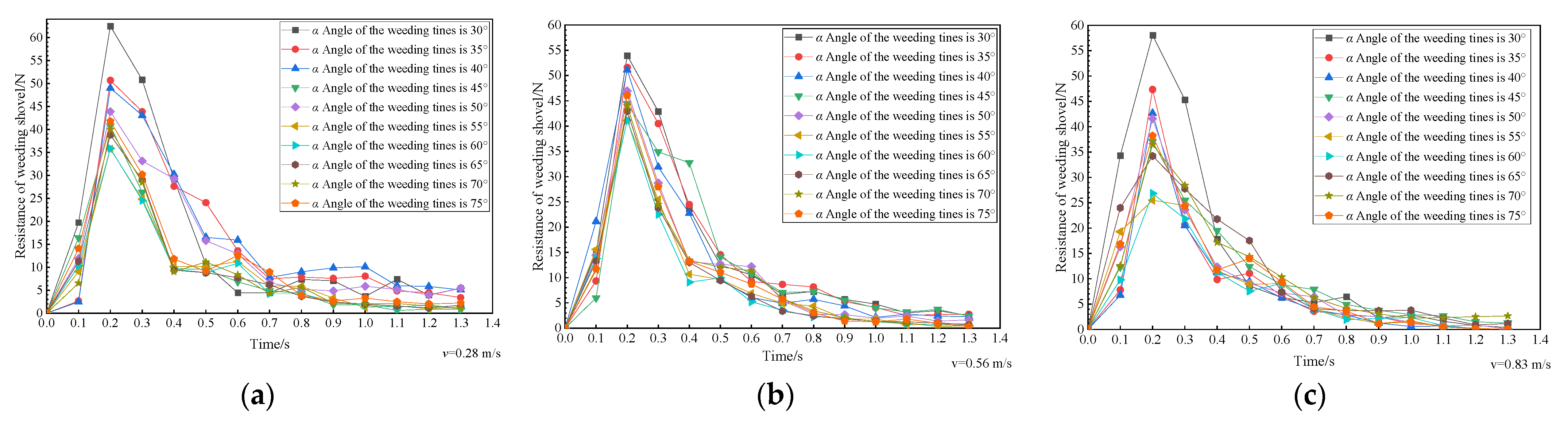
3.1. Results of Simulation
3.2. Results of Field Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peng, R. Effects of Direct Sowing Rates and Panicle Fertilizer on Yield and Grain Quality in Good Tasting Rice Cultivars. Master’s Thesis, Yangzhou University, Yangzhou, China, 2019. [Google Scholar]
- Chen, X. Direct-seeded rice field weeding techniques. Mod. Agric. Sci. Technol. 2018, 46, 143–147. [Google Scholar]
- Dong, L.; Gao, Y.; Fang, J.; Chen, G. Research progress on the herbicide-resistance of weeds in rice fields in China. Plant Prot. 2018, 44, 69–76. [Google Scholar]
- Lu, W.; Dong, L.; Sun, Y.; Li, Y. Weed Control Methods at Home and Abroad. Chin. Agric. Sci. Bull. 2018, 34, 34–39. [Google Scholar]
- Xiang, H.; Lan, N.; Wang, F.; Zhao, B.; Wei, H.; Zhang, J. Reduced Pests, Improved Grain Quality and Greater Total Income: Benefits of Intercropping Rice with Pontederia cordata. J. Sci. Food Agric. 2021, 101, 5907–5917. [Google Scholar] [CrossRef] [PubMed]
- Berg, H.; Tam, N.T. Decreased Use of Pesticides for Increased Yields of Rice and Fish-Options for Sustainable Food Production in the Mekong Delta. Sci. Total Environ. 2018, 619, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Chun, P.; Ji, M.; Zang, X.; Chen, S.; Du, Y. The resistance level and acetyl co-enzyme A carboxylase activity of Echinochloa phyllopogon populations to metamifop in paddies. J. Plant Prot. 2017, 44, 1040–1045. [Google Scholar]
- Imaizumi, T. Weedy Rice Represents an Emerging Threat to Transplanted Rice Production Systems in Japan: Weedy Rice in Transplanted Rice. Weed Biol. Manag. 2018, 18, 99–102. [Google Scholar] [CrossRef]
- Lai, W. Pesticide Use and Health Outcomes: Evidence from Agricultural Water Pollution in China. J. Environ. Econ. Manag. 2017, 86, 93–120. [Google Scholar] [CrossRef]
- Zhang, S.; Song, C.; Zhang, J.; Qi, Y.; Wang, Q.; Chen, J. Occurrence of Herbicides in Rice Fish System at Honghe Hani Terrace Fields. Environ. Sci. Technol. 2018, 41, 184–192. [Google Scholar]
- Ragesh, K.T.; Jogdand, S.V.; Victor, V.M. Field Performance Evaluation of Power Weeder for Paddy Crop. Curr. Agric. Res. J. 2018, 6, 441–448. [Google Scholar]
- Tao, G.; Wang, J.; Zhou, W.; Niu, C.; Zhao, J. Herbicidal Mechanism and Key Components Design for Paddy Weeding Device. Trans. Chin. Soc. Agric. Mach. 2015, 46, 57–63. [Google Scholar]
- Qi, L.; Liang, Z.; Ma, X.; Tan, Y.; Jiang, L. Validation and analysis of fluid-structure interaction between rotary harrow weeding roll and paddy soil. Trans. CSAE 2015, 31, 29–37. [Google Scholar]
- Ma, X.; Qi, L.; Liang, B.; Tan, Z.; Zuo, Y. Present status and prospects of mechanical weeding equipment and technology in paddy field. Trans. CSAE 2011, 27, 162–168. [Google Scholar]
- Wu, C.; Zhang, M.; Jin, C.; Tu, A.; Lu, Y.; Xiao, T. Design and Experiment of 2BYS-6 Type Paddy Weeding-cultivating Machine. Trans. Chin. Soc. Agric. Mach. 2009, 40, 51–54. [Google Scholar]
- Li, Z. A Kind of Water Field Power Weeding Machine. Chinese patent 01220661.X, 23 January 2002. [Google Scholar]
- Ishii, H.; Sato, M. 3 Performance of Herbicides in Paddy Tillage and Measures to Improve Weed Control. Jpn. Crop Soc. Kaedong Branch Bull. 2006, 21, 22–23. [Google Scholar]
- Okamoto, Y. A Weeding Machine. Japanese patent 4038538[P], 16 November 2007. [Google Scholar]
- Yahiko, M. Recent trends in development of mechanical weeding techniques. Tohoku Weed J. 2007, 8, 1–6. [Google Scholar]
- Ye, W.; Xi, X.; Jin, Y.; Shan, X.; Zhang, J.; Zhang, R. Design and experimental research of double axis rotary tillage fertilizing and land seeding compound operation machine. J. Chin. Agric. Mech. 2019, 40, 6–12. [Google Scholar]
- Li, X.; Liu, B. Study of wheel power radius and slip rate. Tract. Farm Transp. 2003, 28, 17–20. [Google Scholar]
- Wang, J.; Wang, J.; Yan, D.; Tang, H.; Zhou, W. Design and Experiment of 3SCJ-2 Type Row Weeding Machine for Paddy Field. Trans. Chin. Soc. Agric. Mach. 2017, 6, 71–78+202. [Google Scholar]
- Chinese Academy of Agricultural Mechanization Sciences (Ed.) Agricultural Machinery Design Handbook, 1st ed.; China Agricultural Science and Technology Press: Beijing, China, 2007; p. 565. [Google Scholar]
- Chen, B. Study on Deep Injection Device of Pneumatic Liquid Fertilizer in Paddy Field. Ph.D. Thesis, South China Agricultural University, Guangzhou, China, 2018. [Google Scholar]
- Jiang, Y.; Qi, L.; Gong, H.; Liu, C.; Tao, M.; Hu, X.; Chen, Q. Design and experiment of pneumatic paddy intra-row weeding device. J. South China Agric. Univ. 2020, 41, 37–49. [Google Scholar]
- Jiang, Y.; Zhao, Z.; Wang, J. Analysis on the Parameters of the Beating Mechanism of Paddy Field Straw Dumping Grader by EDEM Discrete Element. Acta Agric. Univ. Jiangxiensis 2020, 42, 608–618. [Google Scholar]
- DB23/T930-2005; Technical Specification for the Evaluation of the Quality of Seedling Weeding Machine. Department of Agriculture and Rural Affairs of Heilongjiang Province: Harbin, China, 2005.
- Wang, J.; Weng, W.; Ju, J.; Chen, X.; Wang, J.; Wang, H. Design and Test of Weeder between ows in traw Dumping Grd on Remote Control Steering. J. Chin. Agric. Mech. 2021, 52, 97–105. [Google Scholar] [CrossRef]
- Wu, J. Current status and development trend of organic rice cultivation in Heilongjiang Province and surrounding areas. Agric. Equip. Technol. 2020, 46, 4–6+12. [Google Scholar]
- Yan, D. Design and Test of the Electric Controlled Burying-Fertilization Weeder for Paddy Field in Double Row. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2018. [Google Scholar]
- Wang, S.; Zhou, C.; Xiong, W.; Fang, X.; Liang, S. Design of a New Six-row Paddy Weeding Machine. J. Agric. Mech. Res. 2023, 45, 52–57. [Google Scholar]
- Cao, G. Explore the correct use and maintenance of agricultural tractors. Agric. Mach. Using Maint. 2022, 28, 91–93. [Google Scholar]
- Wang, H. Research and Develop of Precision Seeder Control System based on Beidou Satellite Position System. Master’s Thesis, Qingdao University of Technology, Qingdao, China, 2021. [Google Scholar]
- Wang, H.; Tang, Y.; Dong, Z.; Wang, M.; Zhao, J. Self-alignment algorithm of wheat plot breeding path based on Beidou satellite positioning. Acta Agric. Zhejiangensis 2019, 31, 1709–1716. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Technical Parameter |
|---|---|
| Supporting power | 11.3–13.3 kW |
| Number of weeding rows | 9 |
| Working speed | 1.8–2.5 km·h−1 |
| Working width | 3 m |
| Spacing of weeding components | 300/600 mm |
| Height of frame above ground | 580–620 mm |
| Overall weeding depth | 40–80 mm |
| Single row weeding width | 150 mm |
| Parameters | Values |
|---|---|
| Density of soil | 1830 kg·m−3 |
| Poisson’s ratio of soil | 0.5 |
| Shear modulus of soil | 11.5 MPa |
| Radius of soil particle | 1 mm |
| Density of water | 1000 kg·m−3 |
| Poisson’s ratio of water | 0.5 |
| Shear modulus of water | 100 MPa |
| Radius of water particle | 0.5 mm |
| Density of steel | 7860 kg·m−3 |
| Poisson’s ratio of steel | 0.288 |
| Shear modulus of steel | 28,000 MPa |
| Materials | Recovery Coefficient | Static Friction Coefficient | Rolling Friction Coefficient |
|---|---|---|---|
| Water–Water | 0.05 | 0.05 | 0.01 |
| Soil–Soil | 0.05 | 0.90 | 0.01 |
| Soil–Water | 0.05 | 0.05 | 0.01 |
| Soil–Steel | 0.10 | 0.20 | 0.20 |
| Water–Steel | 0.10 | 0.20 | 0.20 |
| α Angle | Count of Disturbed Particles | ||
|---|---|---|---|
| v = 0.28 | v = 0.56 | v = 0.83 | |
| 30° | 21,989 | 22,920 | 15,947 |
| 35° | 26,161 | 23,814 | 17,667 |
| 40° | 26,989 | 24,209 | 20,425 |
| 45° | 32,617 | 27,573 | 26,289 |
| 50° | 28,832 | 26,229 | 22,701 |
| 55° | 27,174 | 25,133 | 21,876 |
| 60° | 23,688 | 22,129 | 19,884 |
| 65° | 22,545 | 21,043 | 18,257 |
| 70° | 21,087 | 20,881 | 18,171 |
| 75° | 20,190 | 19,577 | 17,334 |
| α Angle | Maximum Resistance | Average Resistance | ||||
|---|---|---|---|---|---|---|
| v = 0.28 | v = 0.56 | v = 0.83 | v = 0.28 | v = 0.56 | v = 0.83 | |
| 30° | 62.469 N | 53.931 N | 58.043 N | 15.451 N | 13.707 N | 13.567 N |
| 35° | 50.653 N | 51.607 N | 47.342 N | 14.715 N | 12.131 N | 10.038 N |
| 40° | 48.987 N | 51.109 N | 42.674 N | 13.649 N | 11.941 N | 8.179 N |
| 45° | 40.740 N | 44.401 N | 37.026 N | 13.133 N | 11.569 N | 8.918 N |
| 50° | 43.866 N | 46.940 N | 41.573 N | 9.896 N | 10.527 N | 7.589 N |
| 55° | 35.722 N | 41.075 N | 25.489 N | 8.332 N | 8.138 N | 6.985 N |
| 60° | 35.877 N | 42.155 N | 26.840 N | 8.714 N | 8.695 N | 7.773 N |
| 65° | 38.800 N | 43.977 N | 34.216 N | 8.813 N | 9.039 N | 8.993 N |
| 70° | 39.984 N | 44.055 N | 36.476 N | 9.729 N | 9.379 N | 10.874 N |
| 75° | 41.740 N | 46.082 N | 38.197 N | 10.349 N | 9.523 N | 10.183 N |
| Speed | 1 km·h−1 | 2 km·h−1 | 3 km·h−1 |
|---|---|---|---|
| Inter-row weeding rate | 85.3 ± 2.2% | 82.7 ± 1.2% | 80.2 ± 1.5% |
| Seedling injury rate | 3.5 ± 0.7% | 4.2 ± 0.5% | 5.1 ± 0.8% |
| Source | SS | DF | MS | F | p-Value | F-Crit |
|---|---|---|---|---|---|---|
| Between Groups | 39.02 | 2 | 19.51 | 6.68 | 0.028 | 5.143 |
| Within Groups | 17.06 | 6 | 2.84 | |||
| Total | 56.08 | 8 |
| Source | SS | DF | MS | F | p-Value | F-Crit |
|---|---|---|---|---|---|---|
| Between Groups | 3.86 | 2 | 1.93 | 5.26 | 0.047 | 5.143 |
| Within Groups | 2.2 | 6 | 0.37 | |||
| Total | 7.28 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Xi, X.; Chen, M.; Shi, Y.; Zhang, Y.; Zhang, B.; Qu, J.; Zhang, R. Design of and Experiment on Reciprocating Inter-Row Weeding Machine for Strip-Seeded Rice. Agriculture 2022, 12, 1956. https://doi.org/10.3390/agriculture12111956
Wang Y, Xi X, Chen M, Shi Y, Zhang Y, Zhang B, Qu J, Zhang R. Design of and Experiment on Reciprocating Inter-Row Weeding Machine for Strip-Seeded Rice. Agriculture. 2022; 12(11):1956. https://doi.org/10.3390/agriculture12111956
Chicago/Turabian StyleWang, Yu, Xiaobo Xi, Meng Chen, Yangjie Shi, Yifu Zhang, Baofeng Zhang, Jiwei Qu, and Ruihong Zhang. 2022. "Design of and Experiment on Reciprocating Inter-Row Weeding Machine for Strip-Seeded Rice" Agriculture 12, no. 11: 1956. https://doi.org/10.3390/agriculture12111956